Л_04_Методы исследования линейных САУ
advertisement

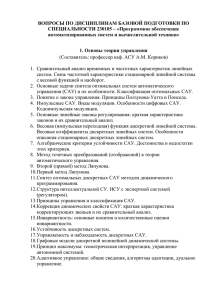
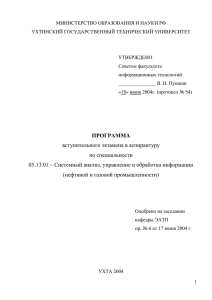
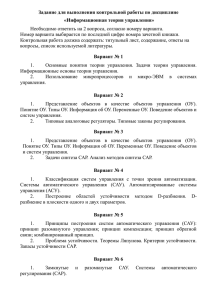
4 Методы исследования линейных САУ 1. 2. 3. 4. Методы исследования линейных САУ Регулирование параметров Непрерывные и дискретные САУ. Дифференциальные уравнения процессов САУ. Управление, при котором автоматически поддерживается в заданных пределах одна величина, определяющая функционирование ОУ, называется автоматическим регулированием Если сигнал поступает постоянно, то такие системы называются непрерывными, а если сигнал поступает через заданные интервалы времени, то такой сигнал называется дискретным Методы исследования линейных САУ • Основные требования, предъявляемыми к САУ: устойчивость, точность отработки задающего воздействия, нечувствительность к мешающим воздействиям и качество переходного процесса. Указанные требования выражаются через числовые характеристики, называемые показателями качества САУ. • Для определения показателей качества САУ используются прямые и косвенные методы анализа качества. • Прямыми называются методы на основе анализа реакции САУ на внешнее воздействие путём решения дифференциального уравнения САУ, а также нахождения интеграла свёртки. Существует два основных способа решения дифференциальных уравнений с постоянными коэффициентами: классический способ и операторный, основанный на преобразовании Лапласа. Преобразова́ние Лапла́са — интегральное преобразование, связывающее функцию \ F(s) комплексного переменного (изображение) с функцией \ f(x) вещественного переменного (оригинал). С его помощью исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения. Одной из особенностей преобразования Лапласа, которые предопределили его широкое распространение в научных и инженерных расчётах, является то, что многим соотношениям и операциям над оригиналами соответствуют более простые соотношения над их изображениями. Так, свёртка двух функций сводится в пространстве изображений к операции умножения, а линейные дифференциальные уравнения становятся алгебраическими. Методы исследования линейных САУ • На практике прямые методы применяют для анализа качества САУ, описываемых уравнениями динамики не выше 2…3 порядка. • Косвенными называются методы, позволяющие судить о качестве без определения реакции САУ на внешнее воздействие. Из косвенных методов наибольшее распространение получили метод коэффициентов ошибок, частотный метод и метод интегральных оценок. • Достоинством косвенных методов по сравнению с прямыми является простота их применения и возможность сравнительно простой оценки влияния параметров системы на ее качество. • Основной недостаток косвенных методов - они дают приближенные оценки показателей качества переходного и установившегося режимов. Сущность регулирования Это процесс, в ходе которого регулируемая величина постоянно измеряется, измеренное значение сравнивается с эталоном и, в зависимости от результата этого сравнения, осуществляется воздействие на регулируемую величину с целью уменьшения различия между ней и задающей величиной. Данный процесс воздействий осуществляется в замкнутом контуре, называемом контуром регулирования. • Во-первых, принцип действия некоторых элементов, входящих в систему, может быть дискретным. • Во-вторых, в дискретных системах проще реализовать сложные алгоритмы управления. • В-третьих, точность решения алгоритмов управления с помощью дискретных устройств (например, ЦВМ) обычно выше, чем с помощью непрерывных • В четвертых, Оказывается, что инструментальные погрешности непрерывных устройств значительно больше, чем устройств дискретных, и сильно растут с усложнением алгоритма обработки. В итоге суммарная погрешность дискретных устройств оказывается меньше инструментальной погрешности непрерывных, что и позволяет говорить о более высокой точности работы дискретных систем. Рассмотрим системы автоматического управления, в которых передача, обработка и преобразование информации осуществляются только в определенные моменты времени, то есть дискретно. В этом случае в системах действуют сигналы, являющиеся некоторой последовательностью импульсов, и такие системы называются дискретными. При изучении теории дискретных систем следует четко различать такие понятия, как процесс и сигнал. Процесс отображает ту информацию, которая преобразуется системой, а сигнал является физическим носителем этой информации. В непрерывных системах оба эти понятия отождествляются, так как значения сигнала в любой момент времени пропорциональны значениям процесса. В теории дискретных систем указанные понятия надо различать. Благодаря наличию импульсных сигналов информация в системе передается отдельными частями, квантами. Процессы, описывающие преобразование этой информации, называются дискретными, а преобразование непрерывных процессов в дискретные называется квантованием. Существует три вида квантования: по времени, по уровню и по времени и уровню одновременно. Квантование по времени Квантование по уровню Комбинированное квантование Типовые внешние возмущения: Единичный скачок Гармонический сигнал Единичный импульс Возрастающий сигнал Комбинированный случай квантования по времени и уровню при постоянном периоде Tn и шаге Δ Информация о значениях дискретного процесса передается с помощью импульсных сигналов путем модуляции их параметров: амплитуды, длительности, фазы, частоты. Различают системы с амплитудной, широтной, фазовой и частотной модуляциями. Особую группу составляют системы с кодовой модуляцией, когда значения процесса передаются путем выбора числа импульсов и их местоположения в группе. Такой вид модуляции применяется в цифровых вычислительных машинах. Одним из достоинств кодовой модуляции является то, что форма импульсов и тип кода практически не влияют на работу системы. Дифференциальные уравнения процессов САУ. Для практической реализации модели в пространстве состояний и их анализа необходимо сделать следующее: 1. Анализ технологического процесса объекта управления с определением переменных управления, управляющих воздействий, возмущений и выходных переменных. 2. Составление балансовых уравнений (материального и энергетического баланса). 3. Запись уравнений в отклонениях. 4. Линеаризация (например, в ряд Тейлора). 5. Переобозначение в привычных символах для модели в пространстве состояний. 6. Нахождение решения. 7. Анализ управляемости и наблюдаемости. Многомерные Непрерывные По роду действия По числу входных величин Связанные Многоконтурные Прерывные Одномерные Несвязанные Одноконтурные По признаку регулируемой величины: 1. температура, 2. расход, 3. давление, 4. уровень и т.д. Прямого действия По способу действия Не прямого действия (доп. энергия) Сокращения структурных схем: 1. устройство измерения (УИ), получающее информацию от объекта регулирования (ОР), 2. датчик (Д), непосредственно подключенный к ОР, 3. информационные преобразователи (ИнП); 4. устройство управления и обработки информации (УУиОИ), 5. в качестве которого в САР используют устройство сравнения (УСр) 6. устройство управления (УУ), формирующее команды управления; 7. устройство воздействия (УВ) на объект регулирования 8. исполнительное устройство (ИУ) 9. регулирующее устройство (РУ), непосредственно воздействующее на ОР. Объект регулирования Простой, одномерный 1 параметр Сложный, многомерный 1 1 1 1 n Управляющее Рв Дополнительный ресивер к тормозным камерам Характеристики объектов регулирования • аккумулирующая способность (величина А – коэффициент емкости); • Время разгона – промежуток времени, за который величина меняется от 0 до максимума при возмущении; Физическая величина, определяющая управляющее воздействие на ОР, называется регулирующей величиной • Это реакция объекта на возмущающее действие время запаздывания отрицательно сказывается на качестве регулирования Это инертность системы 2 СТРУКТУРНАЯ СХЕМА САР Параметр Д Саморегулирование самостоятельный переход к прежнему состоянию или к новому равновесному Н Н Lo Lo Н mп=mр без саморегулирования саморегулирование Неустойчивые объекты имеют отрицательное саморегулирование (ОС – положительна), стабилизация идет за счет обратной отрицательной связи Lo Н Главная обратная связь в системе автоматического регулирования всегда должна быть отрицательной (при увеличении регулируемой величины регулирующее воздействие должно изменяться в сторону противодействия возрастанию регулируемого параметра). Пути достижения экономичности и мощности ДВС В настоящее время к автомобильным двигателям предъявляются жесткие и противоречивые требования по обеспечению их высокой экономичности при заданных уровнях токсичности выбросов. Для управления любым вращающимся валом, расположенным в перемещающейся системе, необходимо иметь все данные о его положении в пространстве, скорости и ускорении. Самой трудно определяемой величиной является ускорения, с которым движутся вал и поршень. Ускорение поршня при приближении к верхней или нижней мертвой точке изменяется постоянно и очень быстро. Поэтому анализ характера его движения стал возможен только при использовании особого датчика, измеряющего мгновенную скорость в тысячу раз быстрее, чем все приборы, используемы в современных системах зажигания..." Адаптивная система управления УОЗ ДВС представляет собой систему замкнутого регулирования. Совмещённый датчик, укреплённый на распределительном валу, позволяет с высокой точностью, до нескольких угловых минут, измерить угловое положение коленчатого вала, его скорость и ускорение. Система регулирования позволяет отслеживать развитие процесса горения в камере сгорания так, чтобы во всех переходных режимах произведение давления в камере сгорания на плечо кривошипно-шатунного механизма было неизменной и максимальной величиной. Система управляет каждым поршнем двигателя так, чтобы коленчатый вал ДВС вращался равномерно во всех переходных режимах, что позволяет снизить пульсации момента и увеличить его среднее значение без увеличения расхода топлива. Система зажигания имеет столь высокую чувствительность и быстродействие, что позволяет определять состав бензиново-воздушной смеси в каждом цилиндре на этапе сжатия и произвести корректировку УОЗ в цилиндре, в котором должен произойти рабочий ход. Основные параметры системы БЗМ-В Диапазон изменения частоты вращения коленвала ДВС от 20 до 10 000 об/мин Снижение расхода топлива до 7% Снижение массовых выбросов СО, СН и NOx до 50% Снижение выбросов холостого хода по СО и СН до 80% Увеличение момента на валу до 7% Уменьшение времени разгона до 10% Повысить топливную экономичность автомобилей возможно только путем оптимизации законов управления углом опережения зажигания. Это может быть достигнуто исключением традиционных механических регуляторов опережения зажигания и использованием чисто электронного цифрового или микропроцессорного регулирования по специально подобранным законам управления. Достигаемое при этом снижение расхода топлива, правда, не столь велико (в пределах нескольких процентов), но все же достойно того, чтобы быть реализованным на практике. 3 ФУНКЦИОНАЛЬНЫЕ И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ Схема системы автоматического регулирования, представленная функциональными элементами и связями между ними, называется функциональной схемой