Преобразователи частоты серии ESMD и ESV
advertisement

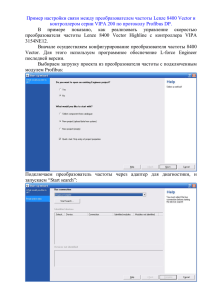
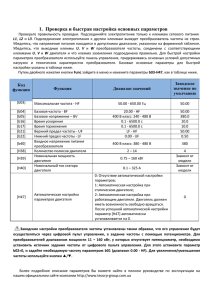
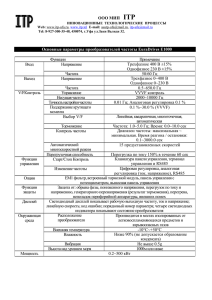
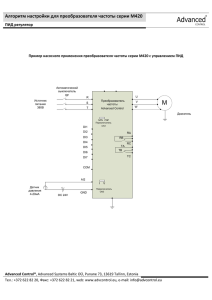
Преобразователи частоты серии ESMD и ESV Преобразователи частоты ESMD Область применений - Горизонтальная транспортировка грузов; Насосы и вентиляторы. Целесообразно применять для двигателей, работающих в режиме S1 EPM EPM – память преобразователя Любое изменение параметров заносится в EPM При отсутствии EPM – высвечивается ошибка FI ЕРМ может переноситься с одного преобразователя частоты на другой ЭТОЙ ЖЕ МОЩНОСТИ! Способы копирования параметров ESV и ESMD Перенос ЕРМ модуля из сгоревшего ПЧ в новый (этой же мощности); Копирование параметров через GDC; Копирование параметров через MEMORY MODULE COPIER. Способы копирования параметров ESV и ESMD Копирование параметров через MEMORY MODULE COPIER Способы копирования параметров ESV и ESMD Номер изделия: EZAEDE1000 Устройство копирования модулей памяти является копирующей системой для всех модулей памяти от Lenze. С помощью простого руководства пользователя данные с модуля копируются быстро и надежно на другой модуль. Устройство копирования пригодно для ESMD, ESV, 8400 Vector, 9400 Servo. Тестирование работоспособности и пуск преобразователей частоты ESMD и ESV Проверка силовой части преобразователя частоты; Подача электропитания на клеммы входного силового соединителя; Контроль управляющих напряжений; Ввод первичных параметров; Схема подключения ESMD...X2 Схема подключения ESMD...L4 Назначение выводов управления Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Основные параметры преобразователя частоты ESMD Предостережение Внимание! Не заземлять и не подавать дополнительного питания на клеммы B+ и B- Данные клеммы предназначены для подключения тормозного модуля (опция) (НЕ ТОРМОЗНОГО СОПРОТИВЛЕНИЯ) Типовые применения преобразователя частоты ESMD Включение функции «Мотор – потенциометр» Типовые применения преобразователя частоты ESMD Включение функции «Мотор – потенциометр» Включение ПИ – регулятора на преобразователе частоты ESMD Встроенный ПИД-регулятор позволяет управлять температурой, давлением, расходом медленно меняющихся процессов при наличии внешнего датчика технологического параметра. Непригоден для реализации обратной связи по скорости с помощью датчика обратной связи по скорости с аналоговым выходом. Включение ПИ – регулятора на преобразователе частоты ESMD Пример. Реализация на демонстрационном стенде ПИ – регулятор технологического процесса. Исходные данные Система управления работает в режиме «нагревателя» Переход в режим ПИ – регулирования осуществляется по срабатыванию дискретного входа Значение технологического параметра изменяется в пределах от 0 до 100% Датчик обратной связи имеет аналоговый выход по напряжению 0..10В Включение ПИ – регулятора на преобразователе частоты ESMD Программируемые параметры Управление режимами преобразователя ESMD с помощью дискретных входов Запуск преобразователя частоты серии ESMD с переключаемым ускорением. Используется для исключения перегрузки при работе частотного преобразователя ни низких скоростях. Пусть насос работает на максимальной скорости 50Гц при включении переключателя «ПУСК». Для исключения биения насоса на низких скоростях вращения и перегрузки преобразователя для частот до 20Гц частотный преобразователь работает со временем ускорения 10с. При достижении 20Гц время ускорения изменяется на 60с и пуск продолжается до номинального значения скорости. Управление режимами преобразователя ESMD с помощью дискретных входов Управление режимами преобразователя ESMD с помощью дискретных входов Преобразователи частоты ESV Спецификация ESV Выходная частота 0 – 500Hz -10-55°C Operation – (понижение тока на 2,5% при температуре >40°C) Степень защиты IP20 (IP65) 4,6,8 и 10 kHz Switching Frequency • По умолчанию 8 kHz (в ПЧ с IP65 по умолчанию 4кГц) ESV <11кВт Цифровые входа • 3 программируемых (PNP или NPN переключаемые) • 1 фиксированный ( разрешение работы ) Цифровые выхода • 2 программируемых – 24В DC / 50mA NPN – Реле 250В (3А) Аналоговые входа • 2 программируемых – Однополярный: 0-10V (>50кОм) – Токовый: 4 до 20mA (250 Ом) Аналоговый выход • 1 программируемый : Скорость, Нагрузка, Крутящий момент Потребляемая мощность – Однополярный: 0-10V (до 20мА) ESV >11кВт Цифровые входа • 4 программируемых (PNP или NPN переключаемые) • 1 фиксированный ( разрешение работы ) Цифровые выхода • 2 программируемых – 24В DC / 50mA NPN – Реле 250В (3А) Аналоговые входа • 2 программируемых – Однополярный: 0-10V (>50кОм) – Токовый: 4 до 20mA (250 Ом) Аналоговый выход • 1 программируемый : Скорость, Нагрузка, Крутящий момент , Потребляемая мощность – Однополярный: 0-10V (до 20мА) Клеммы управления преобразователей серии ESV Для преобразователей до 11кВт Клеммы управления преобразователей серии ESV Для преобразователей свыше 11кВт Коды основных параметров P1xx - коды настройки режимов работы преобразователя частоты; Р2хх – коды настройки ПИД – регулятора; Р3хх – коды настройки векторного режима управления; Р4хх – коды настройки передачи данных по сети посредством коммуникационных модулей; Р5хх – коды параметров диагностики; Р6хх – коды настройки передачи данных по сети посредством встроенных коммуникаций (свыше 11кВт); Р7хх – коды настройки цикличной работы преобразователя. Возврат к заводским уставкам Вы имеете возможность сбросить сделанные Вами изменения на заводские значения, для этого: 1. Снять разрешение 1-4 2. P199=4–сброс на заводские значения 50Гц Способы пуска преобразователя частоты ESV Способы торможения преобразователя частоты ESV Выбор закона управления преобразователем частоты ESV Где применить? Преимущества векторного режима • Увеличение пускового момента • Увеличение диапазона регулирования скорости • Увеличение перегрузочной способности Особенности применения • Управление скоростью или моментом • Простота настройки • Пригоден для асинхронных трехфазных двигателей Настройка векторного режима Подсоедините двигатель согласно инструкции Чтобы настроить привод для работы в векторном режиме или в режиме улучшенного частотного управления U/f • P300 = 4, 5; Установите P302…P306 в соответствии с данными на паспортной табличке двигателя ; Установите P399 = 1 или 2 (мигает CAL/STOP с периодом мигания 1 сек, вал двигателя при этом неподвижен) ; Убедитесь, что двигатель находится в холодном состоянии (20°..25° C), и выполните команду пуска ; Дисплей в течение 40 секунд будет отображать CAL (мигание); По окончании калибровки дисплей покажет StoP; дайте ещё одну команду пуска для фактического запуска двигателя; если попытка выполнить пуск привода в векторном режиме или в режиме улучшенного частотного управления U/f предпринимается; до осуществления Калибровки двигателя, привод будет отображать F_nld и работать не будет • P300 = 2, 3: так же, как указано выше, но необходимо настроить только P302…P304 Настройку на двигатель проводить при холодном двигателе! Режим управления моментом Для перехода в режим управления моментом используется настройка привода на двигатель. При этом Р300=5, то есть включается векторное управление моментом. В параметре Р509 отображается значение крутящего момента, по которому можно следить за текущим значением момента на выходе. В параметре Р101=1 задается, что задание по моменту определяется сигналом 0-10В. В случае данной настройки двигатель разгоняется до максимальной скорости, обозначенной в параметре Р103=50. При подаче нагрузки, отличной от нуля, к примеру 10%, привод будет работать с максимальной скоростью до тех пор, пока реальный момент не сравняется с уставкой по моменту. Далее привод начинает сбрасывать скорость таким образом, чтобы реальное значение момента не превышало заданное. Режим управления моментом Реализация ПИД – регулятора на ESV Схема подключения датчика и проводов управления к частотному преобразователю Реализация ПИД – регулятора на ESV Реализована система управления с ПИД – регулятором для управления вентилятором обогрева приточного воздуха. В системе используется датчик обратной связи с выходом 0-10В, при этом диапазон изменения температуры составляет -50…180 градусов. Система работает по принципу нагревателя, то есть при увеличении рассогласования между заданием и сигналом датчика обратной связи, скорость вращения двигателя увеличивается. Предусмотрено переключение между уставками ПИД – регулятора посредством включения дискретных входов ТВ-13. Реализация ПИД – регулятора на ESV Реализация ПИД – регулятора на ESV Параметры ПИД регулятора Р207, Р208, Р209 настраиваются на объекте. Р231,Р232,Р233 – уставки для технологического параметра (температура). ПОМНИТЬ!!! Вход ТВ-13В имеет приоритет над входом ТВ-13А, в то время как вход ТВ-13С имеет приоритет на ТВ-13В. То есть при замыкании контакта ТВ-13А уставкой будет значение Р231=20. При замыкании ТВ-13В уставкой будет Р232=30, независимо от того, будет ли ТВ-13А замкнут или разомнут. При разомкнутых контактах ТВ-13А, ТВ-13В, ТВ-13С привод работает в режиме управления скоростью SPD. При замыкании хотя бы одного из дискретных входов преобразователь переходит в режим ПИД – регулирования PID. Управление с помощью дискретных входов Управление с помощью кнопок без фиксации (в ESMD такой режим отсутствует) Схема подключения Программируемые параметры Диагностика преобразователя частоты ESV Отображение последних ошибок преобразователя (Р500); Отображение нагрузки (тока двигателя) (Р507, Р508); Отображение крутящего момента (Р509); Отображение времени наработки преобразователя в часах (Р540, Р541) Цикличная работа преобразователя частоты ESV Режим циклической работы 0 – Отключен (параметры Р701-Р799 не отображаются); 1 – Разрешен: переход только по таймеру; 2 – Разрешен: переход по нарастающему фронту; 3 – Разрешен: переход по таймеру или нарастающему фронту. Параметры 1-го сегмента Р710 – Уставка частоты; Р711 – Время разгона/торможения; Р712 – Время текущего сегмента; Р713 – Состояние дискретного выхода (сконфигурировать Р140, Р142=27); Р714 – Значение аналогового выхода (сконфигурировать Р150=10). Примеры реализации Формирование семипериодной диаграммы изменения скорости Примеры реализации Торможение по концевым выключателям с помощью циклических переходов Используется при реализации пятипериодной тахограммы скорости При этом переход от времени движения с максимальной скоростью t2 к времени торможения t3 осуществляется по срабатыванию концевого выключателя, отключающегося во время торможения t3. Торможение по концевым выключателям с помощью циклических переходов Используется промежуточное реле с катушкой питания 12В DC с двумя Н/О контактами и два концевых выключателя SQ1 (переход на низкую скорость) и SQ2 (останов). Торможение по концевым выключателям с помощью циклических переходов Включение работы двигателя по дискретному датчику с NPN - выходом Условие работы: При включении переключателя привод находится в режиме ожидания. При срабатывании индуктивного датчика двигатель начинает вращаться до тех пор, пока датчик не отключится. Включение работы двигателя по дискретному датчику с NPN - выходом Включение работы двигателя по дискретному датчику с NPN - выходом Работа с удаленной клавиатурой ESVZXK1 Доступна как для однофазных, так и трехфазных преобразователей Степень защиты IP65 (со стороны передней панели) Подсоединение к модулю связи ESVZARK RS485 module); Используется для программирования и управления Подключение клавиатуры Подключения Программируемые параметры Быстрая остановка для SMD и ESV с использованием тормозных модулей и резисторов Использование тормозных модулей и внешних резисторов для преобразователей частоты серии ESMD возможно использовать только в трехфазных исполнениях.( например ESMD371L4TXA); Использование тормозных модулей и внешних резисторов для преобразователей частоты серии ESV возможно, как для однофазного, так и для трехфазного исполнения. Подключение тормозного модуля без внешнего резистора Подключение тормозного модуля с внешним резистором Подключение тормозного модуля 9351 с внутренним резистором Нужен дополнительный разъем 402-123 разъем под ESV Подключение тормозного модуля с внешним резистором к ESV Связь Связь по последовательному интерфейсу • Только для ESMDxxxL4TXA (интерфейс встроенный) и ESV (обеспечивается с помощью дополнительных модулей связи) Доступные протоколы • Lecom (внутренний протокол LENZE) • Modbus RTU (стандартный протокол промышленных сетей) Дополнительная информация Функция мотор - потенциометр 2 пропуска частот Авто сброс ошибки Подхват на ходу Вход быстрый стоп Торможение постоянным током Масштабирование аналогового выхода ПИД - регулирование Подключение преобразователей частоты ESMD и ESV к Global Drive Control Подключение ESMDxxxL4TXA осуществляется с помощью преобразователя интерфейсов USB/RS485 (ОВЕН АС4) или RS232/RS485 (AC3-M) ; Подключение ESV с помощью коммуникационного модуля ESVZAR0, работающего по интерфейсу RS485 bпреобразователя интерфейсов USB/RS485 (ОВЕН АС4) или RS232/RS485 (AC3-M) . Подключение преобразователей частоты ESMD и ESV к Global Drive Control Внимание! В старых версиях преобразователей версии ниже 3.00 режим передачи данных по LECOM-B не поддерживается. Также не поддерживается этот режим в коммуникационном модуле 1.0, а только в 1.3 и выше. Подключение преобразователей частоты ESMD и ESV к Global Drive Control Подключение Клемма 4 преобразователя ESV– А(Data+) Клемма 2 преобразователя ESV– B(Data-) При использовании преобразователя AC4 ОВЕН при подключении преобразователя к ПК определить номер виртуального СОМ-порта (просмотреть в диспетчере задач) Файлы конфигурации преобразователей скачиваются с сайта: http://www.lenze-actech.eu/ Подключение преобразователей частоты ESMD и ESV к Global Drive Control Подключение Параметры связи преобразователя с GDC Спасибо за внимание!