К вопросу измерения высоты морских волн с борта судна
advertisement

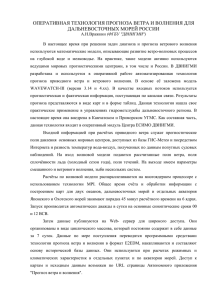
Н.Г. ЗЯБКО ФГОУ ВПО "ВГАВТ", г. Нижний Новгород, Россия К ВОПРОСУ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА СУДНА Для повышения безопасности эксплуатации судов смешанного плавания, имеющих ограничения по волновому режиму, с 1996 года на ряде судов устанавливается система непрерывного мониторинга прочности судового корпуса «СПР-3М». Эта система, помимо оперативного контроля, позволяющего судоводителю оценить реальный запас прочности, которым обладает корпус судна, позволяет записывать информацию о напряженном состоянии корпуса за длительный период эксплуатации судна. Эта информация представляет огромный интерес для оценки имеющихся теоретических решений. Успехи последних лет в развитии элементной базы позволяют ставить новые задачи при создании современных систем непрерывного мониторинга прочности судового корпуса. Одной из важных задач для научного анализа является возможность параллельной записи информации о напряженном состоянии корпуса судна и параметров волнения, фиксируемых непосредственно с судна без спуска волномерного буя. Кроме того, оперативная информация о реальном волнении имеет большое практическое значение для судоводителей. Известно, что метеостанции в лучшем случае дают прогноз о волнении в пределах двух смежных баллов, а это предполагает существенный разброс высот волн. Опыт показывает, что и визуальная оценка высоты волны различными членами экипажа даже в условиях хорошей видимости может расходиться весьма значительно. Особенностью эксплуатации судов смешанного плавания является ограничение волнового режима, при котором судно допускается к плаванию. При этом интенсивность волнового режима характеризуется высотой волны 3% обеспеченности. Это ограничение означает, что при неблагоприятном прогнозе судно не выпускается из порта, а судно, находящееся в плавании, должно направиться к ближайшему месту убежища. Вследствие того, что уход судна с трассы в убежище влечет за собой существенные экономические потери, капитану для принятия такого решения необходим объективный критерий. Контроль параметров волнения в настоящее время может осуществляться контактным методом с помощью волномерного буя. Современные буи позволяют записывать информацию в электронную память, которая после поднятия буя может быть обработана с помощью ЭВМ. Например, буй «Волга», спроектированный и изготовленный на кафедре сопротивления материалов, конструкции корпуса и строительной механики корабля ВГАВТ, определяет и записывает ординаты волнения в течение 15 – 30 минут. Обработка волнограммы, полученной с помощью буя, позволяет установить максимальную высоту волны hmax , высоту волны 3% обеспеченности h3% , средний период волны ср, а также получить спектр волнения. Система непрерывного контроля напряженного состояния корпуса судна осуществляет контроль напряженного состояния корпуса в процессе работы буя, однако при этом судно находится в дрейфе и напряженное состояние отличается от напряженного состояния в движении. После поднятия буя и возобновления движения уже нет уверенности в том, что состояние волнения соответствует замеренному, поскольку стационарность волнения доказана на сравнительно коротких (15 – 30 минутных) промежутках времени. Таким образом, экспериментальные результаты соответствия напряженного состояния и существующего реального волнения всегда остаются под вопросом. Кроме того, вызывают интерес, прежде всего, экстремальные значения напряженного состояния, возникающие в момент расчетного, т.е. максимального прогнозируемого волнения, однако встретить такое волнение в экспериментальных рейсах редко удается, а если и удается, то спустить буй и лечь в дрейф при таком волнении практически невозможно. По этим причинам является актуальной проблемой применение для измерения параметров волнения неконтактных, в частности, активных дистанционных средств контроля за состоянием морского поверхностного волнения. Эти средства базируются на акустическом, лазерном зондировании и радиолокации. Их разработка ведется уже почти полвека. Было предложено большое число методов измерения параметров морского поверхностного волнения с неподвижных платформ, судов, летательных аппаратов, а также с космических станций. Однако широкого внедрения в практику эти методы пока не получили. Это обусловлено тем, что качество получаемой информации существенно зависит от принимаемой оптической, акустической и радиолокационной модели морской поверхности, а также характеристик приемоизлучающей аппаратуры. Очевидно, что точность оценки волнения, на котором работают суда смешанного плавания, недостаточна. Бурное развитие приборостроения в последние годы открывает большие возможности в совершенствовании дистанционных средств измерения параметров морской поверхности, в том числе для создания системы измерения параметров морского волнения непосредственно с борта движущегося судна. Анализируя опыт создания существующих современных инерциальных навигационных систем, которые устанавливаются непосредственно на борту транспортного средства и используются для определения его местоположения в пространстве, конструктивно систему для определения параметров морского волнения непосредственно с борта судна можно реализовать как платформенную и бесплатформенную. В платформенной системе датчик для измерения расстояния между системой и поверхностью воды и инерциальный измеритель линейного ускорения – акселерометр устанавливаются на так называемой гиростабилизированной платформе. Эта платформа, используя свойства гироскопа – сохранять неизменную ориентацию своей оси в пространстве, обеспечит строго вертикальное положение оси датчика и оси чувствительности акселерометра. Измеренные акселерометром вертикальные ускорения дважды интегрируются, и, таким образом, получается информация о приращении местоположения подвижного объекта (датчика) по вертикали. Вычитая значения полученных вертикальных перемещений датчика из результатов определения текущего расстояния от датчика до морской поверхности, получают расстояние от морской поверхности до условно неподвижной точки, совпадающей с точкой размещения приемоизлучающей системы (датчика) при отсутствии морского волнения. Бесплатформенная система отличается тем, что плоскость горизонта в них реализована математически, используя данные гироскопов и акселерометров. Такая система конструктивно проще, в ней нет вращающихся частей, однако, математически она сложнее. В качестве приемоизлучающей системы возможно применение ультразвуковых и оптических интеллектуальных датчиков для измерения расстояния. Рассмотрим бесплатформенный вариант системы, схема которого показана на рис.1. +5В Гироскоп SPI-интерфейс SPI USB USB-интерфейс +12..30В Ультразвуковой датчик Компьютер Рисунок 1 В качестве гироскопа предлагается использовать датчик фирмы Analog Devices ADIS16350AMLZ (или ADIS16355AMLZ). В датчик встроены 3-х осевой акселерометр, 3-х осевой измеритель угловой скорости, термодатчик, дополнительные аналого-цифровой (АЦП) и цифроаналоговый (ЦАП) преобразователи, цифровой интерфейс (SPI) с внешними устройствами. Отличие двух вариантов датчиков заключается в стабильности параметров при изменении температуры. Датчик ADIS16350AMLZ откалиброван при 25C, при изменении температуры может быть существенный уход параметров. Датчик ADIS16355AMLZ откалиброван в диапазоне температур – 40 + 85C, при изменении температуры уход параметров невелик. Вес датчика 16 г, габариты (без крепежа и шлейфа) 23x23x21 мм. Для гироскопов фирмы Analog Devices выпускается отладочная плата ADISUSBZ, с помощью которой можно связать гироскоп с компьютером через USB интерфейс. Ориентировочные габариты платы 110x55 мм. Гироскоп крепится на отладочной плате ADISUSBZ, на которой для этого есть 6 крепежных отверстий. В качестве приемоизлучающей системы предлагается использовать ультразвуковой интеллектуальный датчик UM30-15113, производимый фирмой SICK. Основные технические характеристики датчика UM3015113 следующие: диапазон сканирования 800..6000 мм (максимальная дальность 8000 мм); ультразвуковая частота 80 кГц; разрешение 1 мм; погрешность измерения не более 2%; напряжение питания 12..30 В (постоянное напряжение), ток потребления 70 мА; выход аналоговый (либо 4..20 мА, либо 0..10 В); длительность отклика 230 мс; степень защиты IP65 (защита от струи воды); рабочая температура –20°C..+70°C; температура хранения –40°C..+85°C; масса 360 г, длина датчика 138,5 мм, диаметр 65 мм. Выходной сигнал (напряжение или ток) пропорционален дальности до объекта. Интеллектуальность датчика заключается в том, что он выдает не локационный сигнал, а результаты измерения дальности. Выходной сигнал необходимо оцифровать с помощью аналого-цифрового преобразователя (АЦП) и в цифровом виде отправить в систему сбора данных. АЦП достаточно использовать низкочастотный с не очень высокой разрядностью (порядка 12 разрядов). Выходной сигнал можно подать на вход дополнительного АЦП гироскопа. В датчик встроены средства для тарировки и настройки, но необходимо убедиться, что данный датчик сможет стабильно работать при измерении расстояния до водной поверхности. Питание датчиков предполагается организовать от компьютерного блока питания. Для отладки работы предлагаемой системы предполагается выполнение модельных испытаний в опытовом бассейне ВГАВТ. При этих испытаниях сравнительно легко контролируется истинные параметры создаваемого волнопродуктором волнения.