прозорова2007_h - Школа лингвистики
advertisement

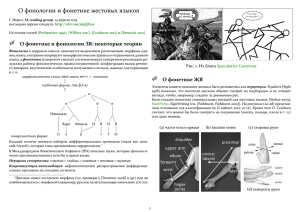
Е.В.Прозорова (2007) Российский жестовый язык как предмет лингвистического исследования Москва: Вопросы языкознания №1, с. 41-61 1. Введение Важнейшие различия между звучащими и жестовыми языками связана с каналом, по которому передается информация. Визуальный коммуникативный канал определяет фундаментальные свойства ЖЯ: 1) ведущую роль в системе жестового языка играет пространство вокруг говорящего => новые способы кодирования (различение референтов путем расположения их в разых точках пространства) 2) элементы жеста выполняются и воспринимаются одновременно => можно одновременно кодировать больше информации, чем в ЖЯ (Crasborn, Van der Hulst, & Van der Kooij, 2000) В мире зафиксирован 121 национальный жестовый язык глухих (Gordon, Jr., 2005) + существуют «универсальные ЖЯ»: нач. 50-х комиссия Всемирной федерации глухих (http://wfdeaf.org/) разработала «жестуно» (Gestuno), или международный жестовый язык (International Sign Language, ISL) пример: http://wfdeaf.org/human-rights/crpd/sign-language , http://www.youtube.com/watch?v=ASyzWokdTbM Цель: облегчить взаимопонимание глухих на международных конференциях, семинарах, соревнованиях It can be seen as a pidgin form of sign language, which is not as conventionalised or complex as natural sign languages and has a limited lexicon (Wikipedia) панъевропейский пиджинизированный ЖЯ 2. Возникновение и развитие национальных ЖЯ В странах Европы и Америки начали складываться в XVIII в. До этого глухие жили достаточно изолированно. А «для формирования развитой системы общения» Первая школа – 1760 г. Париж, под руководством аббата де л'Эпе. Цель: обучить глухих читать и писать по-французски Метод: «мимический метод» (Зайцева, 2000, p. 88) – преподавание на старофранцузском ЖЯ (развился внутри небольшого сообщества глухих в Париже) + «методические жесты» (термины частей речи, др. категорий грамматики) + дактиллирование Метод заимствован в Россию (первая школа в 1806, Павловск) и США (1817, Коннектикут) => родственность русского ЖЯ и американского ЖЯ французскому ЖЯ. (см. в Киммельман 2014 рассуждение о сомнительности этого тезиса) Чуть позже, чем в Париже – школа для глухих в Лейпциге, создана С. Гейнике Цель: обучение глухих устной речи, произношению Метод: «чистый устный метод» – жестовый язык исключается из средств общения учеников с учителями. 1880 г. – конференция в Милане. Чистый устный метод признан более эффективным, чем мимический => дискриминация ЖЯ и перевод их в бытовую сферу В официальной обстановке – разговор на соответствующем звучащем языке. Сопровождался жестами => калькирующая жестовая речь (КЖР, (Зайцева, 2000)) = signed language (ex, signed English) =ЖЯ. 3. Исследования ЖЯ в России и в мире Жестовая лингвистика появилась недавно. Отсчет ведется от работы (Stokoe, 1960), где он описал грамматику АЖЯ и показал, что жестовые языки являются естественными человеческими языками, а не примитивными средствами общения. 1970-1990 – нейро- и психолингвистические исследования ЖЯ: ЖЯ производится и воспринимается в тех же отделах мозга, что и ЗЯ (Bellugi & Klima, 1979) 2000е – типология ЖЯ В настоящее время ЖЯ активно изучаются, функционируют центры ЖЯ, проводятся школы и конференции, выпускаются сборники. РЖЯ исследован мало. Первые исследования – Зайцева, ей принадлежит термин «жестовый язык» (Зайцева, 1987, 2000) Мало словарей (Гейльман, 1975; Фрадкина, 2001; spreadthesign.com; surdoserver.ru) 1992 – очерк Гренобля (Grenoble, 1992) На фоне разнообразия типов звучащих языков жестовые языки выглядят чрезвычайно похоже. Различия проявляются не в базовых принципах, а в более частных грамматических аспектах. 4. Жест Жест (sign) – аналог слова в звучащих языках (= gesture – элемент жестикуляции) 5. Компоненты жеста (фонология ЖЯ) Компоненты, выделенные Стоуки (хиремы, сейчас – фонемы): место выполнения жеста (табула, или таб, по его терминологии) жест выполняется в нейтральном пространстве на уровне какой-либо части тела в контакте с какой-либо частью тела конфигурация руки (дезигнатор, или дез) траектория/направление движения (сигнация, или сиг) + характер движения одна vs. две руки выражение лица 6. Жестовое пространство Термин У.Белуджи (Bellugi, 1972) Область, в пределах которой говорящий обычно выполняет жесты. Это пространство перед говорящим, верхняя граница – чуть выше головы, нижняя – чуть ниже талии Нейтральное жестовое пространство – пространство перед говорящим, в котором жест выполняется без контакта рук с телом 7. Активная и пассивная рука Жесты, выполняющиеся одной рукой, – одноручные; двумя – двуручные Двуручные – симметричные vs. несимметричные (руки – активная и пассивная). Активная рука у правшей – правая, у левшей – левая. В особых обстоятельствах говорящий может поменять местами активную и пассивную руки (например, если так ему удобнее описывать расположение объектов) 8. Особенности лексики жестовых языков Фундаментальную роль в образовании жестов играет иконичность. Зайцева (2000) выделяет следующие типы иконических жестов: а) рисующие: жест обрисовывает контур обозначаемого предмета (пример: 'шляпа') б) пластические: жест дает пластическое изображение денотата (пример: 'стул' vs. 'обезьяна') в) жесты, имитирующие действия (пример: 'лезть') Со временем жесты могут терять иконичность, становиться более абстрактными (Bellugi & Klima, 1976; Frishberg, 1975) Но иконичность играет большую роль в образовании жестов, что составляет проблему для теоретических лингвистов. Например, невозможность составления фонологического инвентаря жестового языка (Crasborn et al., 2000) 9. Классы слов в жестовых языках Нечеткое различие между классами слов в ЖЯ. Много работ, посвященных попытке найти формальные различия между глаголами и существительными в АЖЯ, иранском ЖЯ (Anderson, 1982; Suppala & Newport, 1978; Valli & Lucas, 1995; Zesnan, 2003). В русской тридиции в РЖЯ не принято выделять разные части речи См, однако, (Kimmelman, 2009), где экспериментальным путем выявлены формальные параметры, разграничивающие сущ от гл 10. Категории имени и глагола ничего интересного 11. Морфология жестовых языков. Аффиксы. Словоизменительные процессы в жестовых языках носят характер модификации формы жеста. 1) возможность изменить характер движения в предикатном жесте, чтобы передать различные аспектуальные значения или согласование с аргументами. 2) инкорпорация обозначения числа в именные жесты с временным значением. 12. Типы предикатных жестов В (Padden, 1983) предикатные жесты АЖЯ разделены на: 1) согласующиеся (agreeing): при выполнении жеста рука движется между двумя позициями в пределах жестовой области, которые ранее были зафиксированы как позиции некоторых референтов. 2) Пространственные глаголы: при выполнении жеста движение руки повторяет траекторию движения объекта 3) неизменяющиеся жесты: траектория движения не меняется В работе (Liddell, 1990) указываются различия между типами (1) и (2) – связаны с тем, должна ли рука в итоге оказаться в данном локусе 13-14. Классификаторы в жестовых и звучащих языках описание взято из Классификаторы в звучащих языках: Kinjo neighborhood no GEN ie house ga NOM ni-ken two-CLASS mizu water ni DAT tsukatta soaked ‘Two houses in the neighborhood were flooded.’ Boku wa empitsu o I TOP pencil ACC ‘I bought two pencils.’ ni-hon two-CLASS kat-ta. buy.PAST. В японском ИГ с числительным или детерминантам всегда имеют классификаторы, которые указывают, к какому (семантическому?) классу принадлежит существительное в ИГ. Такие классификаторы, как в японском, называют, numeral classifiers. Бывают также noun classifiers (в которых классификаторный маркер присоединяется в сущ), verbal, possessed, locative и другие. Классификаторы в ЖЯ: употребляются с глаголами движения и нахождения в пространстве; представляют собой определенные конфигурации руки, которые указывают на то, какой объект движется/где-то находится. Пример: в РЖЯ человек идет/машина едет/велосипед едет Пример 2: в нидерландском ЖЯ: человек падает/книга падает 15. Референция в жестовых языках Референция в звучащих языках – обозначение референта с помощью какого-либо языкового средства Референция в жестовых языках – «называние» референта при помощи жеста, а так же его локализация Если референт присутствует, говорящий, говоря о нем, направляет жесты в его сторону Если нет, он закрепляет за ним определенный локус Референциальный сдвиг сигнализирует о том, что говорящий начинает описывать событие с точки зрения того референта, роль которого он принимает. В положении референциального сдвига говорящий использует местоимение первого лица для обозначения референта, от имени которого он выступает. Имеет сходства с прямой речью в звучащих языках. 16. Системы нотации жестовых языков Нотация Стоуки 55 символов, обрвзующих три группы в соответствии с тремя параметрами жеста: а) место выполнения жеста ([] – нейтральное пространство, \ – рука от плеча до локтя) б) траектория движения (> -- движение вправо, < – движение влево) в) конфигурация (названиями цифр и букв алфавита). Ориентация руки – нижнем индексом при символе формы руки Порядок символов фиксирован: место – конфигурация – траектория Эта нотация легла в основу принципа организации первого словаря американского жестового языка (Stokoe, Casterline, & Croneberg, 1976). В нем место жеста определялось по его форме, а не по переводу Недостатки не фиксирует выражение лица, характер движения Модифицированная версия нотации Стоуки используется в словаре британского жестового языка (Brien, 1992). Гамбургская система нотации (Hamburg Notation System, HamNoSys) Разрабатывалась для того, чтобы применяться для записи в как можно большем числе жестовых языков, очень подробная (около 200 символов) Используется в многочисленных тематических статьях немецкого жестового языка, словаре австралийского жестового языка (Johnston, 1997), новозеландского жестового языка (Kennedy, 1998). Транскрипционная система Беркли (BTS) (Hoiting & Slobin, 2002) Разработана для записи жестового дискурса В основе – выделение «значимых» элементов» (можно сопоставить с глоссированием) Жест – последовательность элементов, снабженных индексами L – прямолинейная траектория src'L – удаляющееся движение по прямой траектории gol'L – приближающееся движение по прямой траектории форма пассивной руки-форма активной руки-движение руки-ориентация руки Sign Writing (Sutton, 1996) Создана не лингвистом, а профессиональной танцовщицей. Быстро превратилась в форму записи жеста для повседневного применения. Жест записывается не как линейная последовательность символов, а изображается пиктограммой, включающей иконические изображения рук, их движений (с помощью разнообразных стрелок), их расположения друг относительно друга, при необходимости – выражение лица. Цепочка жестов записывается сверху вниз. Используется во многих словарях, например, в онлайн словаре фламандского жя (gebaren.ugent) Библиография Anderson, L. (1982). Universals of aspect and parts of speech: parallels between signed and spoken language. In P.J. Hooper (ed.) Tense-aspect: between semantics and pragmatics. Amsterdam. Bellugi, U. (1972). Studies in sign language. O’Rourke (ed.) Psycholinguistics and Total Communication. Bellugi, U., & Klima, E. S. (1976). Two faces of sign: iconic and abstract. The Origins of Evolution of Language and Speech. Bellugi, U., & Klima, E. S. (1979). Language: perspectives from another modality. Brain and Mind, 99–117. Brien, D. (ed. . (1992). Dictionary of British sign language. London. Crasborn, O., Van der Hulst, H., & Van der Kooij, E. (2000). Phonetic and phonological distinctions in sign languages. Presented at the Intersign: Workshop 2, Leiden, December 1998. Retrieved from www.sign-lang.unihamburg.de/intersign/Workshop2/CrashbornHulstKooij/crasbor_hulst-Kooij.html Frishberg, N. (1975). Arbitrariness and iconicity: Historical change in American sign language. Language, 51. Gordon, Jr., R. G. (Ed.). (2005). Ethnologue: Languages of the World (15th ed.). Dallas (Tex.). Retrieved from www.ethnologue.com Grenoble, L. (1992). An overview of Russian sign language. Sign Language Studies, V, 21:77. Hoiting, N., & Slobin, D. (2002). Transcription as a tool for understanding: The Berkeley transcription system for sign language research (BTS). In G. Morgan, B. Woll (eds.) Directions in sign language acquisition. Amsterdam: Philadelphia. Retrieved from http://ihd.berkley.edu/btsforsignlanguage.pdf Johnston, T. (1997). Institute for deaf and blind children: Signs of Australia on CD-ROM: a dictionary of Auslan (Australian sign language). North Rocks. Kennedy, G. (1998). A dictionary of New Zeland sign language. Auckland. Kimmelman, V. (2009). Parts of speech in Russian Sign Language : the role of iconicity and economy. Sign Language & Linguistics, 12(2), 161–186. Liddell, S. (1990). Four functions of a locus: Reexamining the structure of space in ASL. In C. Lukas (ed.) Sign language research. Theoretical issues. Washington. Padden, C. (1983). The interaction of morphology and syntax in American sign language. University of California, San Diego. Stokoe, W. (1960). Sign language structure: An outline of the visual communication systems of the American deaf. Studies in Linguistics, 21: Occasional papers 8. Stokoe, W., Casterline, D., & Croneberg, C. (1976). A dictionary of American sign language on linguistic principles. Silver Spring. Suppala, T., & Newport, E. (1978). How many seats in a chair? The derivation of nouns and verbs in American sign language. In P. Siple (ed.) Understanding sign language through sign language research. New York. Sutton, V. (1996). Sign Writing Web Site. La Jolla (CA). Retrieved from www.SignWriting.org Valli, C., & Lucas, C. (1995). Linguistics of American sign language: An introduction. Washington. Zesnan, U. (2003). Indo-Pakistani sign language grammar: a typological outline. Sign Language Studies, III(2). Гейльман, И. Ф. (1975). Специфические средства общения глухих. Дактилология и мимика (Vol. 1–4). Ленинград. Зайцева, Г. Л. (1987). Методы изучения системы жестового общения глухих. Дефектология, (1). Зайцева, Г. Л. (2000). Жестовая речь. Дактилология: Учебник для студентов высших учебных заведений. Москва. Фрадкина, Р. Н. (2001). Говорящие руки: тематический словарь жестового языка глухих России. Москва.