ЗАДАЧА № 4 РАСЧЕТ СЛОЖНОЙ СТАТИЧЕСКИ
advertisement

Министерство образования и науки Российской Федерации
Сыктывкарский лесной институт –
филиал государственного образовательного учреждения
высшего профессионального образования «Санкт-Петербургская
государственная лесотехническая академия имени С. М. Кирова»
КАФЕДРА ДОРОЖНОГО, ПРОМЫШЛЕННОГО И ГРАЖДАНСКОГО СТРОИТЕЛЬСТВА
СТРОИТЕЛЬНАЯ МЕХАНИКА
Методическое пособие
для студентов специальностей
270205 «Автомобильные дороги и аэродромы»,
270102 «Промышленное и гражданское строительство»
и направления бакалавриата 270800 «Строительство»
всех форм обучения
Самостоятельное учебное электронное издание
СЫКТЫВКАР 2011
УДК 531
ББК 30.121
С86
Рекомендовано к изданию кафедрой дорожного, промышленного и гражданского
строительства Сыктывкарского лесного института.
Утверждено к печати советом лесотранспортного факультета
Сыктывкарского лесного института.
Составители:
З. И. Кормщикова, кандидат технических наук, доцент
В. Н. Корзунин, заведующий лабораторией
Ответственный редактор:
С. И. Морозов, кандидат технических наук, доцент
Рецензенты:
Б. А. Голдин, доктор геолого-минералогических наук, профессор,
главный научный сотрудник (Институт химии Коми НЦ УрО РАН)
А. И. Гусев, заведующий лабораторией кафедры технической механики
(Сыктывкарский лесной институт)
СТРОИТЕЛЬНАЯ МЕХАНИКА [Электронный ресурс] : методичеС86 ское пособие для студентов специальностей 270205 «Автомобильные дороги и аэродромы», 270102 «Промышленное и гражданское строительство» и направления бакалавриата 270800 «Строительство» всех форм обучения : самост. учеб. электрон. изд. / Сыкт. лесн. ин-т ; сост. З. И. Кормщикова, В. Н. Корзунин. – Электрон. дан. (1 файл в формате pdf : 6,1 Мб).
– Сыктывкар : СЛИ, 2011. – Режим доступа: http://lib.sfi.komi.com. – Загл. с
экрана.
Издание предназначено для студентов всех форм обучения специальностей
270205 «Автомобильные дороги и аэродромы», 270102 «Промышленное и гражданское строительство» и направления подготовки 270800 «Строительство» при
изучении ими дисциплины "Строительная механика". Приведены задания к контрольным работам, а также методические указания по их выполнению. Рассмотрены примеры решения задач.
________________
Самостоятельное учебное электронное издание
УДК 531
ББК 30.121
Составители: Кормщикова Зинаида Ильинична, Корзунин Валерий Николаевич
СТРОИТЕЛЬНАЯ МЕХАНИКА
Электронный формат – pdf
Разрешено к публикации 23.03.11. Объем 5,9 уч.-изд. л.; 6,1 Мб.
________________
Сыктывкарский лесной институт – филиал государственного образовательного учреждения высшего
профессионального образования «Санкт-Петербургская государственная лесотехническая академия
имени С. М. Кирова» (СЛИ), 167982, г. Сыктывкар, ул. Ленина, 39
institut@sfi.komi.com, www.sli.komi.com
Редакционно-издательский отдел СЛИ. Заказ № 15.
© СЛИ, 2011
© З. И. Кормщикова, В. Н. Корзунин, составление, 2011
2
ОГЛАВЛЕНИЕ
УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНЫХ РАБОТ……………………………...
4
ЗАДАЧА № 1. РАСЧЕТ МНОГО ПРОЛЕТНОЙ ШАРНИРНО-КОНСОЛЬНОЙ БАЛКИ ...
4
Методические указания к решению задачи № 1 ………………………………………..
7
ЗАДАЧА № 2. РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ ИЛИ РАМЫ …………………………
15
Методические указания к решению задачи № 2 ………………………………………..
17
ЗАДАЧА № 3. РАСЧЕТ ПЛОСКОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ ФЕРМЫ ………… 22
Методические указания к решению задачи № 3 ………………………………………..
23
ЗАДАЧА № 4. РАСЧЕТ ШПРЕНГЕЛЬНОЙ ФЕРМЫ ……………………………………….
31
Методические указания к решению задачи № 4 ………………………………………..
32
ЗАДАЧА № 5. РАСЧЕТ ПЛОСКОЙ СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ
РАМЫ МЕТОДОМ СИЛ ……………………………………………………………………….
45
Методические указания к решению задачи № 5 ………………………………………..
45
ЗАДАЧА № 6. РАСЧЕТ НЕРАЗРЕЗНОЙ БАЛКИ С ИСПОЛЬЗОВАНИЕМ
УРАВНЕНИЯ ТРЕХ МОМЕНТОВ ……………………………………………………………
56
Методические указания к решению задачи № 6 ………………………………………..
58
ЗАДАЧА № 7. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ РАМЫ МЕТОДОМ
ПЕРЕМЕЩЕНИЙ (ДЕФОРМАЦИЙ) …………………………………………………………
62
Методические указания к решению задачи № 7 ………………………………………..
65
БИБЛИОГРАФИЧЕСКИЙ СПИСОК …………………………………………………………
81
3
УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНЫХ РАБОТ
В пособии представлены 7 задач. Студенты специальности «Промышленное и гражданское строительство» и направления подготовки «Строительство»
выполняют задачи № 1, 2, 3, 6 и 7. Студенты специальности «Автомобильные
дороги и аэродромы» 1, 2, 4, 5, 6.
Исходные данные для решения заданий выбираются студентом из таблиц,
которые приведены к каждой задаче в соответствии с его личным учебным
шифром (номером зачетной книжки). Шифром считаются три последние цифры. Например: если номер зачетной книжки 20531, то учебным шифром будет
число 531. Для получения исходных данных необходимо выписать из таблицы
три строки: одну, отвечающую первой цифре шифра, вторую, отвечающую
второй (средней) цифре шифра и третью, отвечающей последней цифре шифра
(номер расчетной схемы).
Работы, выполненные не по своему варианту, преподавателем не принимаются и остаются без рецензии.
К каждой задаче даны необходимые теоретические сведения и справочный
материал, приведены примеры решения задач. Кроме методических указаний
при решении контрольной работы студент должен использовать литературу,
указанную в библиографическом списке.
Каждая контрольная работа должна быть выполнена на листах писчей бумаги формата А4. Чертежи, выполненные на листах миллиметровой бумаги,
значительно облегчают выполнение работы, что позволит избежать ошибок,
связанных с решением задач, т. к. числовые значения в большинстве расчетов
берутся из чертежа.
Перед решением задачи необходимо вычертить расчетную схему в определенном масштабе с указанием размеров и внешних нагрузок в числах. Решение
задачи должно сопровождаться краткими последовательными пояснениями и
схемами с размерами.
Необходимо помнить, что язык техники – это чертежи и формулы.
На эпюрах и линиях влияния должны быть проставлены значения всех характерных ординат и размерности. Отмеченные рецензентом замечания нельзя
убирать.
ЗАДАЧА № 1. РАСЧЕТ МНОГОПРОЛЕТНОЙ
ШАРНИРНО-КОНСОЛЬНОЙ БАЛКИ
Задание. Для балки, выбранной по варианту (табл. 1) и расчетной схеме
(рис. 1), требуется:
1) построить эпюры поперечных сил (Q) и изгибающих моментов (М) аналитически.
2) построить линии влияния Q и М для заданных сечений, а также линию
влияния любой опорной реакции R.
4
3) по линиям влияния определить значения M, Q и R от заданной нагрузки
и сверить их со значениями, полученными аналитически для заданных сечений.
Таблица 1
Числовые данные к задаче № 1
Первая цифра шифра
l1, м
b, м
q1, кН/м
Вторая цифра шифра
l2, м
a, м
q2, кН/м
Третья цифра шифра
l3, м
P, кН
d, м
Номера сечений по
первой цифре шифра
с, м
1
10
2,0
1,5
1
9,0
2,0
3,0
1
8,0
2,0
3,0
2
14
3,0
2,0
2
10,0
2,2
2,5
2
4,0
1,5
2,0
3
8
2,0
2,5
3
11,0
3,0
2,2
3
10,0
2,5
2,0
4
12
3,0
3,0
4
13,0
2,6
0,8
4
12,0
4,0
1,0
5
9
3,6
2,4
5
14,0
2,4
1,8
5
6,0
3,0
0,6
6
11
3,0
1,8
6
15,0
3,2
2,6
6
2,0
4,5
1,0
7
14
4,0
2,2
7
8,0
3,4
1,0
7
4,0
3,5
1,2
8
15
2,5
2,6
8
10,0
3,6
1,5
8
5,0
2,5
1,5
9
8
2,0
1,0
9
11,0
2,0
2,0
9
7,0
6,0
2,0
0
13
1,6
0,8
0
9,0
2,4
2,4
0
9,0
5,0
2,5
1; 2
3; 4
5; 6
1; 4
2; 3
4; 5
3; 6
1; 3
4; 2
2; 5
1,2
1,5
2,0
2,5
1,8
2,2
1,6
2,4
1,4
2,6
q1
1
1
P
c
2
4
3
d
l1
6
b5
l2
a
P
q1
q2
2
2
q2
1
3
c
4
c
l1
l2
q1
P
4
b
l1
q2
1
3
3
6 d
a
5
6
5
c
2
c
l2
d
l3
Рис. 1. Расчетные схемы к задаче № 1
5
a
P
q2
4
4
q1
1
6
d
5
c
2
c
b
l1
c
l2
q1
3
l3
q2
P
1
5
5
6
2
b
3
c
l1
a
q2
l2
q1
P
4
3
2
6
5
1
6
d
b
c
l1
a
l2
a
q2
q1
P
6
2
7
3
5
4
c
d
l1
a
l2
q2
8
b
P
3
4
c
c
5
q1
1
6
2
d
l1
l2
Рис. 1. Продолжение
6
a
1
4
q1
P
4
9
c
5
6
l1
q2
0
5
b
1
2
c
l2
P
3
l3
q1
1 2
3
6
b
a
q2
c
4
c
l1
l2
l3
Рис. 1. Окончание
Методические указания к решению задачи № 1
Для построения эпюр поперечных сил и изгибающих моментов используется "поэтажная" схема, которая располагается под схемой заданной балки.
При построении "поэтажной" схемы необходимо выделить основные балки, для этого мысленно удаляют шарниры, соединяющие балки. Те балки, которые самостоятельно способны нести нагрузку (защемленные или имеющие
две земные опоры), будут основными, или главными. Второстепенные, или
вспомогательные, балки имеют только одну земную опору или не имеют опор
вообще (пример рис. 2).
Çàäàííàÿ ñõåìà ìíîãîïðîëåòíîé áàëêè
Çàäàííàÿ ñõåìà ìíîãîïðîëåòíîé áàëêè
"Ïîýòàæíàÿ" ñõåìà ìíîãîïðîëåòíîé áàëêè
"Ïîýòàæíàÿ" ñõåìà ìíîãîïðîëåòíîé áàëêè
îñíîâíàÿ áàëêà
âñïîìîãàòåëüíûå áàëêè
îñíîâíûå áàëêè
Рис. 2. Пример образования «поэтажных» схем в многопролетных балках
7
После построения "поэтажной" схемы заданную балку рассматривают как
ряд простых балок. Для того чтобы провести расчет, необходимо в местах расчленения балки (шарнирах) приложить силы взаимодействия между двумя
смежными балками. Эти силы должны быть равны между собой и противоположно направлены.
Расчет на подвижную нагрузку производится при помощи линий влияний
(л. в.). Линии влияния опорных реакций балки на двух опорах с консолями являются основными (рис. 3), поэтому вид и исходные ординаты л. в. опорных
реакций необходимо запомнить. Каждая из опорных л. в. показывает, что реакция опоры равна единице, когда груз Р = 1 стоит над этой опорой, и уменьшается по линейному закону до нуля, когда груз приближается к противоположной опоре.
õ
A
P=1
B
l
1
ëâ RÀ
1
1
ëâ RÂ
Рис. 3. Линии влияния опорных реакций
Все остальные л. в. усилий в сечениях сооружений строятся на базе основных (рис. 4). Ординаты л. в. в каком-либо сечении определяются из подобия
треугольников. Правила, которые необходимо запомнить при построении л. в. в
многопролетных балках:
- в земных опорах л. в. проходят через ноль (нулевая точка), а на консолях
левые и правые ветви л. в. имеют продолжение;
- в шарнирах л. в. имеют перелом;
- если в пролетах балки встречаются подряд два шарнира, то ордината л. в.
усилия во втором шарнире по ходу движения единичного груза от нижележащей балки равна нулю;
- движение груза по балкам, лежащим ниже искомой, не рассматривается,
так как нагрузка, приложенная к ним, не вызывает усилий в верхних этажах.
8
l1
D
d
l2
l
C
A
B
a
b
a
b
ab
l
ëâ Ìñ
b/l
1
ëâ QC
d
1
ëâ ÌD
ëâ QD
1
a/l
ëâ ÌB
1
l2
ëâ QA(ëåâ)
1
1
ëâ QA(ïðàâ)
1
ëâ QB(ïðàâ)
ëâ QB(ëåâ)
Рис. 4. Примеры построения линий влияния поперечных сил и изгибающих моментов
в различных сечениях двухопорной балки
Ордината л. в. показывает, чему равно усилие при действии в этой точке
Р = 1. При действии на сооружение системы сосредоточенных сил, моментов
сил и распределенных нагрузок на нескольких участках усилие S в некотором
сечении сооружения производится по формуле
n
m
z
i =1
j =1
k =1
S = ∑ Pi yi + ∑ q j ω j + ∑ М k tgα k ,
(1)
где Р – сосредоточенная сила, действующая на сооружение, у – ордината л. в.
усилия под сосредоточенной нагрузкой, q – распределенная нагрузка, ω – площадь, образованная той частью л. в., под которой находится распределенная нагрузка, М – момент сил, tgα – тангенс угла наклона л. в. к базовой прямой.
9
Нагрузки, направленные сверху вниз считаются положительными. Момент сил считается положительным, если он направлен по ходу часовой стрелки. Для тангенса угла наклона принимается следующее правило: если направление оси балки к л. в. на участке действия сосредоточенного момента совпадает с направлением момента, то получаем знак "минус", если не совпадает, то
знак "плюс".
Пример решения задачи № 1
Схема балки представлена на рис. 5, а.
Расчленяем балку по шарнирам Е, F, G и составляем "поэтажную" схему, в
которой балки АЕ (с жесткой заделкой) и GCD (на двух шарнирных опорах) являются основными, а второстепенные балки – ЕВF (имеет одну земную опору)
и FG (без земных опор) (рис. 5, б).
0,5
1 B
Ð2 =8 êÍ
à)
A
E
A
1ì
E
C
G
F
1
Ð1 =6 êÍ
2
1
2ì
m=4 êÍì
q=4 êÍ/ì
1
2
1
G
F
B
2 D
1
1
3ì
D
C
á)
Рис. 5. Расчетная схема многопролетной балки и ее «поэтажная» схема
Аналитический расчет внутренних усилий начинаем с второстепенной балки FG. Расчетная
схема балки FG, загруженной равномерно распределенной нагрузкой (рис. 6), хорошо известна из
курса «Сопротивления материалов», поэтому не
приводим примера расчета опорных реакций и
значений внутренних усилий в сечениях.
RF = RG =
ql 4 ⋅ 2
=
= 4 кН.
2
2
10
RG
RF
2
Q
4
4
M
2
Рис. 6. Расчет второстепенной
балки FG
Балка GCD.
Расчетная схема балки и эпюры внутренних усилий показаны на рис. 7. К
нагрузкам, действующих на эту балку, добавили давление от второстепенной
балки RG.
Реакции в опорах определяются из уравнений моментов сил относительно
левой и правой опоры.
∑ М D = 0; RG ⋅ 5 + q ⋅1⋅ 4,5 − RC ⋅ 4 − М − P1 ⋅1 = 0.
Из уравнения определяем RС = 7 кН.
∑М
C
= 0; RG ⋅1 + q ⋅1 ⋅ 0,5 − М + RD ⋅ 4 − P1 ⋅ 5 = 0.
Из полученного уравнения определяем RD = 7 кН.
Произведем проверку равновесия балки:
∑ Y = 0; R
C
+ R D − q ⋅ 1 − RG − P1 = 0.
Равенство нулю всех вертикальных сил, приложенных к балке, доказывает,
что реакции в опорах и сила в шарнире рассчитаны верно.
Строим эпюры поперечных сил и изгибающих моментов основной балки
(рис. 7).
q=4 êÍ/ì
RÑ =7 êÍ
Ì=4 êÍì
G
RG =4 êÍ
RD =7 êÍ
D
C
1
3ì
1
1
6
Q
4
Ð1 =6 êÍ
1
8
M
6
9
5
6
Рис. 7. Расчетная схема основной балки
Балка EBF.
К нагрузкам, действующих на эту балку, добавили давление от второстепенной балки RF.
11
Ð2 =8 êÍ
RE =2 êÍ
Определение реакций в опорах из
уравнений моментов сил.
∑ М E = 0; P2 ⋅1 − RB ⋅ 2 + RF ⋅ 3 = 0.
R =10 êÍ
E
F
B
1ì
1
1
Q
2
RF =4 êÍ
4
6
4
M
2
Рис. 8. Расчетная схема
второстепенной балки
Следовательно RВ = 10 кН.
∑ М B = 0; P2 ⋅1 − RE ⋅ 2 − RF ⋅ 4 = 0.
RЕ = 2 кН.
Проверка выполнения условия
равновесия второстепенной балки:
∑ Y = 0; R
E
+ RB − RF − P2 = 0.
Равенство нулю всех вертикальных
сил, приложенных к балке, доказывает,
что реакции в опорах и сила в шарнире
рассчитаны верно.
Эпюры внутренних усилий представлены на рис. 8.
Балка AЕ.
Балка является основной и воспринимает нагрузку от второстепенной балки EBF.
A
E
RE =2 êÍ
2
2
Q
4
M
Рис. 9. Расчетная схема основной балки
Консольная с жестким защемлением балка хорошо известна из курса
«Сопротивления материалов. Расчетная схема балки и эпюры внутренних
усилий показаны на рис. 9.
Общие эпюры поперечных сил и изгибающих моментов для заданной балки показаны на рис. 101.
Значения поперечной силы и изгибающего момента в заданных сечениях
балки составляют:
В сечении 1−1: М1-1 = −1 кН⋅м, Q1-1 = −6 кН.
В сечении 2−2, расположенном на бесконечно малом расстоянии слева от
опоры D: М2-2 = −6 кН⋅м, Q2-2 = −1 кН.
Реакция в жесткой заделке RА = 2 кН.
12
RA =2 êÍ
RC =7 êÍ
RB =10 êÍ
Ð2 =8 êÍ
A
q=4 êÍ/ì
1
1ì
1
C
G
F
1
2ì
Ì=4 êÍì
B
E
1
2
1
3ì
4
2
RD =7 êÍ
Ð1 =6 êÍ
2
2 D
1
1
6
Ýïþðà Q
1
6
4
4
4
Ýïþðà Ì
8
6
9
5
6
1
2
2
Рис. 10. Эпюры внутренних усилий в многопролетной балке
Линию влияния момента в сечении 1−1 строим как для однопролетной балки (рис. 4, л. в. МС), откладывая под сечением 1−1 ординату, равную 0,375, определяемую формулой (a ⋅ b)/l, где а = 1,5 м. b = 0,5 м, l = 2 м (рис. 11, а). Правую и левую ветки л. в. соединяем с нулем на опорах Е и В. Правая ветка л. в.
имеет продолжение на консоли ВF, на шарнире F происходит перелом л. в. и
продолжение на верхнюю вспомогательную балку в нуль в шарнире G. На балках АЕ и GCD все ординаты л. в. будут равны нулю, т. к. при перемещении груза по этим балкам изгибающего момента в сечении 1−1 не возникает.
Линию влияния поперечной силы в сечении 1−1 строим как для однопролетной балки (рис. 4, л. в. QC), откладывая под сечением 1−1 ординаты, равные
−0,75 и + 0,25, определяемые формулами a/l и −b/l, где а = 1,5 м. b = 0,5 м, l = 2
м (рис. 11, б). Правую и левую ветки л. в. соединяем с нулем на опорах Е и В.
Правая ветка л. в. имеет продолжение на консоли ВF, на шарнире F происходит
перелом л. в. и продолжение на верхнюю вспомогательную балку в нуль в шарнире G. На балках АЕ и GCD все ординаты л. в. будут равны нулю, т. к. при перемещении груза по этим балкам поперечной силы в сечении 1−1 не возникает.
Ординаты л. в. момента и поперечной силы под опорой F, а также ординаты л. в. под сосредоточенной силой Р2 определяем из подобия треугольников.
y1 =
0 ,375 ⋅ 1
0,75 ⋅1
= 0 , 25 , y 2 =
= 0,5.
1,5
1,5
Значение изгибающего момента в сечении 1−1:
13
⎛ 1
⎞
M 1−1 = P2 ⋅ y1 + q ⋅ ω1 = 8 ⋅ 0,25 + 4⎜ − ⋅ 2 ⋅ 0,75 ⎟ = −1 кН ⋅ м.
⎝ 2
⎠
Значение поперечной силы в сечении 1−1:
⎛ 1
⎞
Q1−1 = P2 ⋅ y 2 + q ⋅ ω 2 = 8 ⋅ ( −0,5) + 4⎜ − ⋅ 2 ⋅ 0,5 ⎟ = −6 кН.
⎝ 2
⎠
Значения внутренних усилий в сечении 1−1 балки, рассчитанных по линиям влияния совпадают с аналитическим расчетом.
0,5
1
Ð2 =8 êÍ
A
E
A
1ì
1
2
1
G
F
E
C
G
F
1
1,5
0,5
2
2 D
1
1
3ì
D
C
B
0,375
Ì=4 êÍì
B
1
2ì
Ð1 =6 êÍ
q=4 êÍ/ì
ω1
ëâ Ì1-1
ω2
ëâ Q1-1
à)
ó1
ó2
0,75
0,25
á)
ä)
ω3
1
ó5
ω4
0,25
ó3
ëâ Q2-2
1
α
â)
ã)
ëâ M2-2
0,5
0,75
0,25
ëâ RA
ó4
1
0,5
0,5
Рис. 11. Линии влияния усилий в заданных сечениях балки
Построение л. в. усилий в сечении 2−2, расположенном на бесконечно
близком расстоянии слева от опоры D.
14
Правая ветка л. в. момента строится как для консоли (см. рис. 4, л. в. МD),
а ординаты левой ветки равны нулю. Построение л. в. М2-2 показано на
рис. 11, в.
Ордината л. в. левой ветки поперечной силы в сечении 2−2 равна − 1, на
опоре С равна нулю. Левая ветка л. в. Q2-2 имеет продолжение на консоли GC,
перелом в шарнире G и значение ординаты = 0 в шарнире F.
Правая ветка Q2-2 параллельна левой. Построение л. в. Q2-2 показано на
рис. 11, г.
Значение изгибающего момента в сечении 2−2:
M 2− 2 = P1 ⋅ y 3 = 6 ⋅ ( −1) = −6 кН ⋅ м.
Значение поперечной силы в сечении 2−2:
1
⎛ 1⎞
Q2− 2 = P1 ⋅ y 4 + q ⋅ ω3 + М ⋅ tgα = 6 ⋅ (−0,25) + 4 ⋅ 0,25 ⋅ 3 + 4 ⋅ ⎜ − ⎟ = −1 кН.
2
⎝ 4⎠
Значения внутренних усилий в сечении 2−2 балки, рассчитанных по линиям влияния совпадают с аналитическим расчетом.
При построении л. в. реакции в жесткой заделке рассмотрим сначала только основную балку АЕ, которая представляет собой балку с жесткой заделкой.
RA
A
MA
P=1
Для такой балки табличные л. в.
реакции и реактивного момента
представлены на рис. 12.
С основной балки л. в. RA переходит
на вспомогательные балки EBF и FG
с продолжением на консоли и переломом на шарнирах (рис. 11, д).
Значение RA определим по
формуле: R A = P2 ⋅ y5 + q ⋅ ω4 .
⎛ 1
⎞
R A = 8 ⋅ 0,5 + 4⎜ − ⋅ 2 ⋅ 0,5 ⎟ = 2 кН.
⎝ 2
⎠
Значение реакции совпадает с
аналитическим расчетом.
E
l
ëâ RA
1
ëâ ÌA
l
Рис. 12. Линии влияния реакции и реактивного момента консольной балки
ЗАДАЧА № 2. РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ ИЛИ РАМЫ
Задание. Исходные данные выбираются из табл. 3 согласно шифру, расчетные схемы представлены на рис. 13. Требуется:
1) по выбранной схеме рассчитать аналитически значения изгибающего
момента (М), поперечной (Q) и продольной (N) сил в заданном сечении.
2) построить л. в. усилий для заданного сечения и по ним определить значения М, Q, N. Сравнить полученные результаты.
15
Таблица 3
Данные для задачи № 2
Первая цифра шифра
l, м
α
Вторая цифра шифра
q1, кН/м
q2, кН/м
Р, кН
Третья цифра шифра
Схема
f/l
Номер сечения
ак, м
Очертание оси
1
26
0,2
1
0
4
12
1
а
0,34
1
6
п
2
36
0,5
2
4
0
9
2
а
0,35
2
8
о
3
18
0,3
3
0
5
14
3
б
0,39
1
7
р
4
28
0,6
4
5
0
18
4
в
0,40
1
3
р
5
20
0,4
5
0
6
20
5
г
0,32
2
4
р
6
32
0,7
6
6
0
21
6
а
0,36
2
8
п
7
22
0,8
7
7
0
15
7
а
0,38
1
5
о
8
34
0,25
8
0
7
19
8
б
0,33
2
8
р
9
0
24
30
0,35 0,45
9
0
8
0
0
8
22
24
9
0
в
г
0,30 0,31
2
1
6
7
р
р
Обозначения в последней строке: п – парабола, о – окружность, р – рама.
Ñ
1
á
2
Ñ
ó
1
2
f
ó
f
a
l/2
l/2
õ
aê
l
Ñ
1
2
f
2
l/2
l/2
aê
45Å
45Å
À
õ
f
Å
30
Å
30
1
ã
l/3
Â
aê
l
30Å
â
aê
ó
Ñ
ó
À
30Å
aê
45Å
45Å
Â
À
l
Â
aê
õ
À
Â
aê
Рис. 13. Расчетные схемы к задаче № 2
16
l
aê
õ
Схема нагрузки для заданных схем
αl/2 P
q2
q1
αl
l
Рис. 13. Окончание
Методические указания к решению задачи № 2
Трехшарнирная арка (рама) представляет собой статически определимую
систему, состоящую из двух полуарок (полурам), соединенных между собой и с
опорами шарнирами. На рис. 14 представлена схема арки.
l – пролет арки, f – стрела подъема. Уравнение оси арки, угол наклона ϕ
касательной к оси арки и тригонометрические функции sinϕ, cosϕ можно вычислить по следующим формулам:
1) ось арки – квадратная парабола:
dy 4 f
4f
(l − 2a K );
tgϕ =
=
y K = 2 (l − a K )a K ;
dx l 2
l
1
sin ϕ = cos ϕ ⋅ tgϕ.
(2)
cos ϕ =
;
2
1 + tg ϕ
2) ось арки – окружность:
2
f l2
;
R= +
2 8f
⎛l
⎞
yK = R − ⎜ − aK ⎟ − R + f ;
⎝2
⎠
2
sin ϕ =
l − 2a K
;
2R
cos ϕ =
C
Ó
yK
f
ϕK
Ê
A
H
aK
RA
B
H
Õ
bK
l
RB
Рис. 14. Расчетная схема арки
17
yK + R − f
.
R
(3)
Вертикальные реакции
RA, RВ определяются как в
простой двухопорной балке из уравнений моментов
сил относительно правой и
левой опоры.
Горизонтальные реакции (распоры) определяются
из
уравнений
прав
∑ М C = 0 и ∑ М Cлев = 0 .
При составлении уравнений
∑М
прав
C
= 0 или
∑М
лев
C
= 0 введем обозна-
чения: М С0 − сумма моментов сил в простой балке. Тогда из уравнения моментов сил в шарнире арки получим М С0 − Нf = 0 .
M С0
.
H=
f
(4)
Распор равен изгибающему моменту простой балки, разделенному на
стрелу подъема.
Для определения усилий M, Q, N в поперечных сечениях арок или рам при
действии на них вертикальной нагрузки используются следующие формулы:
Изгибающий момент в некотором сечении К:
M K = M K0 − H ⋅ у K ,
(5)
0
где M K − изгибающий момент как в простой балке длиной аК.
Поперечная сила в некотором сечении К:
QK = QK0 cos ϕ K − H sin ϕ K ,
(6)
где Qк0 − поперечная сила как в простой балке длиной аК.
Продольная сила в сечении К:
N K = −QK0 sin ϕ K − H cos ϕ K .
(7)
Для рамы значения y, sinϕ, cosϕ на каждом участке определяются с помощью геометрических построений.
Пример решения задачи № 2
Схема арки представлена на рис. 15.
l = 24 м, f / l = 0,4, α = 0,7, q = 3 кН, Р = 12 кН, y K =
4f
(l − a K )a K , ось арки
l2
очерчена по параболе.
Определим вертикальные опорные реакции в арке как в простой двухопорной балке, составив уравнения статики:
∑M
B
= 0; R A ⋅ l − P (l − 8,4 ) − q ⋅ 7,2 ⋅ 7,2 / 2 = 0.
Из этого уравнения определим реакцию в опоре А: RА = 11,04 кН.
∑M
A
= 0; − R B ⋅ l + P ⋅ 8,4 + q ⋅ 7,2(16,8 + 7,2 / 2 ) = 0.
Это уравнение позволяет определить реакцию опоры В: RВ = 22,56 кН.
18
Проверка. ∑ y = 0; R A − P − q ⋅ 7,2 + RB = 0 дает следующий результат:
11,04 − 12 − 21,6 + 22,56 = 0, значит, значения реакций опор определены верно.
al/2 = 8,4 ì
Ð = 12 êÍ
q = 3 êÍ/ì
al=16,8 ì
7,2 ì
C
N1
1
f1
f
y1
f1
Q1
RB
RA
HÂ
HA
À
a1 = 6 ì
l/2 = 12 ì
Â
l = 24 ì
Рис. 15. Расчетная схема заданной арки
Рассчитаем горизонтальные реакции (распор) из уравнения моментов сил
справа или слева от шарнира С (НА = НВ = Н).
∑М
лев
C
∑М
пр
C
l
⎛l
⎞
− P⎜ − 8,4 ⎟ − H A f = 0, ⇒ H A = 9,3 кН.
2
⎝2
⎠
l
⎛ l 7, 2 ⎞
= 0; RВ − q ⋅ 7,2⎜ −
⎟ − H B f = 0, ⇒ H B = 9,3 кН.
2
⎝2 2 ⎠
= 0; R A
Определим M, Q, N в заданном сечении 1–1.
Величина изгибающего момента:
M 1 = R A ⋅ a1 − H ⋅ y1 = −0,72 кН ⋅ м, где y1 =
4f
(l − a1 )a1 = 7,2 м.
l2
Величина поперечной силы в сечении 1–1:
Q1 = R A cos ϕ1 − H sin ϕ1 = 2,83 кН,
4f
1
где cos ϕ1 =
= 0,78, tgϕ1 = 2 (l − 2a1 ) = 0,8;
l
1 + tg 2ϕ
1
sin ϕ1 = cos ϕ1 ⋅ tgϕ1 = 0,625.
Величина продольной силы в сечении 1–1:
N 1 = − R A ⋅ sin ϕ1 − H ⋅ cos ϕ1 = −14,14 кН.
19
При построении линий влияния для M, Q, N в сечении 1–1 от заданной нагрузки требуется убрать с арки все внешние нагрузки и нагрузить арку подвижной единичной силой Р = 1 (рис. 16).
8,4
Для построения л. в. момента
используем
выражение
М1
0
M 1 = M 1 − H ⋅ y1.
В этом случае требуется построить две линии влияния – от
момента как в простой балке
M 10 и л. в. распора, умноженного на ординату у1 (рис. 16).
Ордината л. в. момента M 10 в
сечении балки определяется
формулой (a1 ⋅ b1)/l (см. рис. 4).
Значение ординаты составит
(6 ⋅ 18)/24 = 4,5.
0
Обе ветки момента M 1 на
опорах арки имеют нулевые ординаты.
Под шарниром С определяем
ординату распора, умноженного
на у1:
l
24
H ⋅ y1 =
y1 =
7,2 = 4,5.
4f
4 ⋅ 9,6
7,2 ì
q = 3 êÍ/ì
Ð = 12 êÍ
C
1
f
1
b1 =18 ì
y1
( )
a1 = 6 ì
l/2 = 12 ì
l = 24 ì
4,5
ëâ Ì1
1,8
ó1 =3,9
3
4,5
2,25
0
ω1
ëâ Í⋅ó1
2,7
ω2
ó2 =3,15
2,25
ëâ Ì1 =Ì1 -H⋅ó1
0
1,5
Рис. 16. Построение л. в. изгибающего момента
в сечении арки
Для определения численного значения изгибающего момента в сечении 1−1
воспользуемся формулами (1) и (2). Отметим ординаты на л. в., лежащие под
внешними нагрузками, определим их значения из пропорций в прямоугольном
треугольнике.
М1 = Р · у1 + q · ω1 − (Р · у2 + q · ω2) = 12 · 3,9 + 3 · ½(1,8 · 7,2) −
− (12 · 3,15 + 3 · ½(2,7 · 7,2)) = −0,72 кН⋅м.
Значение изгибающего момента в сечении 1−1, рассчитанного с помощью
линий влияния полностью совпадает с аналитическим расчетом.
20
Для построения линии влияния поперечной силы Q1 используем выраже0
ние Q1 = Q1 cos ϕ1 − H ⋅ sin ϕ1 . В этом случае требуется построить две линии
влияния – от поперечной силы как в простой балке, умноженной на косинус угла наклона касательной к сечению арки (Q10 cos ϕ1 ) и линию влияния распора,
умноженного на синус угла наклона касательной (рис. 17).
8,4
7,2 ì
q = 3 êÍ/ì
Ð = 12 êÍ
C
1
f
y1
1
b1 =18 ì
a1 = 6 ì
l/2 = 12 ì
l = 24 ì
ëâ Q1 cosϕ1
0,234
0
0,585
ó3 =0,507
0,39
0,195
ω3
0,39
ëâ Í⋅sinϕ1
0,234
ω4
0,198 ó4 =0,2734
0
0,387
ëâ Q1 =Q1 cosϕ1 -H⋅sinϕ1
0,393
Ординаты л. в. поперечной
силы в сечении простой балки
см. на рис. 4.
Ордината левой ветки л. в.
a
Q в сечении арки − 1 cos ϕ1 =
l
6
= − ⋅ 0,78 = −0,195.
24
Ордината правой ветки линии влияния поперечной силы
b1
18
⋅ 0,78 = 0,585.
cos ϕ1 =
l
24
Ордината л. в. распора, умноженного
на
sinϕ1:
l
24
sin ϕ1 =
⋅ 0,625 = 0,39.
4f
4 ⋅ 9,6
Численное значение поперечной силы:
Q1 = Р · у3 + q · ω3 − (Р · у4 +
+ q · ω4) = = 12 · 0,507 +
+ 3 · ½(0,234 · 7,2) −
– (12 · 0,2734 +
+ 3 · ½(0,243 · 7,2)) = 2,8 кН.
Рис. 17. Построение л. в. поперечной силы
в сечении арки
Расхождение в значении поперечной силы, рассчитанной по линиям влияния, составляет примерно 1 % от значения, полученного аналитическим расчетом. Такое отклонение допускается.
21
Для построения линии влияния продольной силы N1 используем выражение N1 = −Q10 sin ϕ1 − H cos ϕ1 . В этом случае требуется построить две л. в. – от
поперечной силы как в простой балке, умноженной на синус угла наклона каса-
(
)
0
тельной к сечению арки Q1 sin ϕ1 и л. в. распора, умноженного на косинус уг-
ла наклона касательной (рис. 18).
8,4
7,2 ì
q = 3 êÍ/ì
Ð = 12 êÍ
C
1
f
y1
1
a1 = 6 ì
b1 =18 ì
l/2 = 12 ì
l = 24 ì
0,156
ëâ -Q1 sinϕ1
0
0,187
ω5
0,312
ó5 =0,406
0,468
ëâ -Í⋅cosϕ1
0,293
0,244 ó =0,34
6
0,487
ω6
ëâ Q1 =-(Q1 sinϕ1 +H⋅cosϕ1 )
0
0,088
0,712
0,799
Рис. 18. Построение л. в. продольной силы
в сечении арки
Ординаты л. в. поперечной силы в сечении простой
балки см. рис. 4.
Ордината левой ветки линии влияния N в сечении арки
a1
6
sin ϕ1 =
⋅ 0,625 = 0,156.
l
24
Ордината правой ветки
линии влияния продольной силы
b
− 1 sin ϕ1 = − 18 ⋅ 0,625 = −0,468.
l
24
Ордината л. в. распора,
умноженного на cosϕ1:
l
−
cos ϕ1 =
4f
24
=
⋅ 0,78 = 0,4875.
4 ⋅ 9,6
N1 = Р · у5 + q · ω5 + Р · у6 +
+ q · ω6 = 12 · (−0,406) +
+ 3 · ½(−0,187 · 7,2) +
+ 12 · (−0,341) +
+ 3 · ½(−0,293 · 7,2) =
= −14,148 кН.
Значение продольной силы, полученное аналитически, составляет –14,14 кН.
ЗАДАЧА № 3. РАСЧЕТ ПЛОСКОЙ
СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ ФЕРМЫ
Задание. Для плоской статически определимой фермы, выбранной по
шифру из табл. 4 с размерами и нагрузкой по рис. 19, требуется:
1) определить усилия в стержнях заданной панели, включая правую и левую стойки, применяя способ сечений.
22
2) построить линии влияния для стержней заданной панели (5 стержней),
по которым определить усилия и сравнить результат, полученный аналитически.
Методические указания к решению задачи № 3
Аналитический расчет статически определимой фермы начинается с определения опорных реакций, которые находятся из уравнений равновесия моментов сил относительно правой и левой опор как для простой двухопорной балки.
Таблица 4
Числовые данные к задаче № 3
Первая цифра шифра
d, м
P, кН
Вторая цифра шифра
Номер панели
(считается слева)
Номер схемы
h, м
1
4,5
1,8
1
2
8,25
1,5
2
3
5,25
1,2
3
4
6,0
1,0
4
5
9,0
1,9
5
6
6,3
2,0
6
7
6,9
1,1
7
8
6,75
1,3
8
9
7,5
1,4
9
0
6,6
1,6
0
5
4
3
2
3
4
5
2
3
4
1
3,0
2
5,5
3
3,5
4
4,0
5
6,0
6
4,2
7
4,6
8
4,5
9
5,0
0
4,4
P
P
P
2
1
P
P
P
h
P
h
P
d
3
d
P
P
4
P
P
P
P
P
P
h
P
d
P
1,5d
P
2d
Рис. 19. Расчетные схемы к задаче № 3
23
h
P
5
6
P
2
d
P
P
P
P 2
P
P
P
P
2
h/2
h/2
P
2
P
P
h/2
h/2
P
P
2d
8
3h/4
h
h
7
P
P
d P
P
P
P
2
P
2
P
P
P
d
P
P
P
2
0
9
P
P
P
P
P
P
P
P
P
h/2
h/2
h/2
P
h/2
P
2
d
d
Рис. 19. Окончание
Продольные усилия в стержнях фермы определяются методом сечений. В
зависимости от вида проведенного сечения различают три основных способа
аналитического расчета: способ моментной точки, способ проекций и способ
вырезания узлов. Необходимо стремится к тому, чтобы усилие в каждом
стержне определялось независимо от усилий в других стержнях. Достигнуть
этого всегда удается почти во всех случаях путем правильного выбора сечения
и использования одного из трех способов. Необходимо усвоить признаки нулевых стержней.
Рассмотрим способы определения усилий на примере фермы (рис. 20).
Реакции в опорах фермы определим из уравнений моментов сил относительно левой и правой опоры.
∑М
∑М
A
= 0; RB ⋅16 − P2 ⋅12 − P1 ⋅ 4 = 0; ⇒ RB = 9,5 кН.
B
= 0; R A ⋅16 − P1 ⋅12 − P2 ⋅ 4 = 0; ⇒ R A = 8,5 кН.
24
Проверка: ∑ y = R A + RB − P1 − P2 = 8,5 + 9,5 − 8 − 10 = 0.
Усилие в стержне 2−3 определяем методом моментной точки. Проводим
сечение n−n, рассматриваем равновесие левой части фермы относительно моментной точки 7 (точка, в которой пересекаются направления всех стержней
перерезанной панели кроме искомого).
∑ М 7лев = 0; R A ⋅ 8 − P1 ⋅ 4 + N 2−3 ⋅ 4 = 0; ⇒ N 2−3 = −9 кН. (Сжатие).
Усилие в стержне 7−6 также определяем методом моментной точки, которой в данном случае является точка 3.
∑ М 3лев = 0; RA ⋅12 − P1 ⋅ 8 − N 7−6 ⋅ 4 = 0; ⇒ N 7−6 = 9,5 кН. (Растяжение).
Усилие в стержне 7−3 определяем методом проекций, рассматривая левую
часть фермы.
лев
∑ y = 0; R A − P1 + N 7−3 ⋅ cos α = 0; ⇒ N 7−3 ≈ −0,71 кН. (Сжатие).
Метод вырезания узлов рассмотрим на примере определения усилия в
стержне 7−6. Рассматривая равновесие ненагруженного трехстержневого узла,
следует, что это частный случай равновесия узла. Оси двух стержней 7−6 и 6−В
лежат на одной прямой, усилия в них равны между собой, но противоположно
направлены, третий стержень 6−3 является «одиночным», усилие в нем равно
нулю.
P2 =10 êÍ
1
N7-3
N6-3
4ì
α
4ì
3
7
8
A
n
2 N2-3
N7-6
4ì
RA
n
4
5
4ì
P1 =8 êÍ
B
6
4ì
4ì
RB
Рис. 20. Расчетная схема статически определимой фермы
Построение линий влияния. Ординаты линий влияния для определения
усилия в любом стержне фермы выражаются через опорные реакции А и В от
подвижной нагрузки P = 1, которую рассматриваем или слева от сечения или
справа.
Пример решения задачи № 3
Схема фермы представлена на рис. 21: d – длина панели равна 6 м, 2h –
высота фермы составляет 8 м, узловая нагрузка Р = 6 кН.
25
n
RB
h
h
1
RA
2
A
4
3
n
P
P
B
d
P
P
P
Рис. 21. Расчетная схема фермы
Определяем опорные реакции RA и RB, т. к. ферма и нагрузка симметричны,
P 5⋅6
= 15 кН.
то они будут равны: R А = RВ = ∑ =
2
2
Произведем необходимые расчеты геометрических параметров фермы
(рис. 22).
h
h ⋅ 3d
⎛ h ⎞
⎛ 4 ⎞
0
a=
=
= 3d = 18 м.
α = arctg ⎜ ⎟ = arctg ⎜
⎟ ≈ 12,53 .
tg
α
h
d
⋅
3
3
6
⎝ ⎠
⎝
⎠
r1−2 = (a + 2d )sinα = 30 ⋅ sin12,530 = 6,5 м.
h 4
= м.
3 3
⎛ h + h1 ⎞
⎛ 4h ⎞
0
ϕ = artg ⎜
⎟ = artg ⎜ ⎟ ≈ 41,6 .
⎝ 3d ⎠
⎝ d ⎠
h1 = d ⋅ tgα =
r1-3 = (a + 2d )sinϕ = 5d ⋅ sinϕ = 5 ⋅ 6 ⋅ sin41,60 = 20 м.
r1-2
r1-3
2
0
a
d
4
d
3
Рис. 22. Расчет геометрических параметров фермы
26
h1
2h
ϕ
α
h
α
1
d
Проводим сечение n–n и рассматриваем левую часть фермы (рис. 23).
Определяем усилие в стержне N1–2 методом моментной точки. Т. к. в пределах перерезанной панели в узле 3 пересекаются направления всех стержней
кроме 1−2, то моментной точкой будет узел 3. Уравнение моментов сил относительно узла 3:
∑ М 3лев = 0; P ⋅ d − RA ⋅ 2d − N1−2 ⋅ r1−2 = 0. Из уравнения получаем численное
значение продольной силы N1-2 = − 22,2 кН (сжатие).
Для определения усилия в стержне 4−3 нижнего пояса составим уравнение
моментов сил относительно точки 1.
N4-3 = 22,5 кН (растяжение).
∑ М 1лев = 0; − RA ⋅ d + N 4−3 ⋅ h = 0.
Для составления уравнения моментов сил и определения усилия в стержне
1−3 выбираем моментную точку 0.
∑ М 0лев = 0; RA ⋅ 3d − P ⋅ 4d − N1−3 ⋅ r1-3 = 0. N1-3 = 6,3 кН (растяжение).
r1-3
n N1-2
1
RA
r1-2
N1-3
4
A
0
a
3
n N4-3
d
P
Рис. 23. Схема определения усилий в стержнях фермы
Для определения усилий в вертикальных стержнях фермы проводим сечения m−m и k−k (рис. 24).
Моментной точкой для определения усилий в этих стержнях является точка 0.
∑М
∑М
лев
0
= 0; RA ⋅ 3d − P ⋅ 4d − P ⋅ 5d + N 3−2 ⋅ 5d = 0. N3-2 = 1,8 кН (растяжение).
лев
0
= 0; RA ⋅ 3d − P ⋅ 4d + N1−4 ⋅ 4d = 0. N1-4 = −5,25 кН (сжатие).
27
RA
k
1
N1-2
m
N3-2
N1-4
A
0
4
a=3d
d
P d
k
3
P
m
Рис. 24. Схема определения усилий в вертикальных стержнях фермы
Построение л. в. в заданных стержнях фермы (рис. 25).
Линия влияния продольного усилия N1-3.
Груз Р = 1 перемещается левее узла 2 перерезанной панели. Отбросим левую часть фермы. Рассмотрим равновесие оставшейся правой части фермы относительно моментной точки 0.
9d
∑ М 0прав = 0; RB ⋅ 9d + N1−3 ⋅ r1−3 = 0, откуда N1−3 = − r1−3 RB = −2,7 RB получаем уравнение левой ветки л. в., из которого видно, что она изменяется по закону опорной реакции RВ, но ее ординаты нужно умножить на отрицательное
число 2,7.
Груз Р = 1 перемещается правее узла 2 перерезанной панели. Отбросим
правую часть фермы. Рассмотрим равновесие оставшейся левой части фермы
относительно моментной точки 0.
3d
∑ М 0лев = 0; RА ⋅ 3d − N1−3 ⋅ r1−3 = 0, откуда N1−3 = r1−3 R A = 0,9 R A получаем
уравнение правой ветки л. в., из которого видно, что она изменяется по закону
опорной реакции RА, но ее ординаты нужно умножить на число 0,9.
Обе ветки пересекаются под моментной точкой. При узловом методе передачи нагрузки следует соединить ординату левой ветки л. в. под узлом 4 с ординатой правой ветки л. в. под узлом 3 передаточной прямой.
Для расчета численного значения продольного усилия в стержне 1−3 следует определить значения ординат под узлами фермы из подобия треугольников и произвести расчет по формуле (1). Для нашего случая:
N1−3 = P∑ yi = 6 ⋅ (− 2,7 / 6 + 3,6 / 6 + 0,45 + 1,8 / 6 + 0,9 / 6) = 6,3 кН.
Полученное значение продольного усилия полностью совпадает со значением, рассчитанным аналитически.
Линия влияния продольного усилия N3-4.
Последовательно составляем уравнения равновесия правой и левой частей
фермы относительно моментной точки 1.
28
∑М
прав
1
= 0; RB ⋅ 5d − N 4−3 ⋅ h = 0, откуда
N 4 −3 =
5d
RB = 7,5 RB , получаем
h
уравнение левой ветки л. в.
∑ М 1лев = 0; RА ⋅ d − N 4−3 ⋅ h = 0, откуда N 4−3 =
d
R A = 1,5 R A , получаем уравh
нение правой ветки л. в.
Обе ветки пересекаются под моментной точкой 1. Передаточная прямая в
данном случае совпадает с правой веткой.
Из подобия треугольников определяем ординаты л. в. под узлами фермы и
производим расчет усилия в стержне 3−4.
N 3−4 = P∑ yi = 6 ⋅ (7,5 / 6 + 6 / 6 + 4,5 / 6 + 3 / 6 + 1,5 / 6) = 22,5 кН. Полученное значение продольного усилия полностью совпадает со значением, рассчитанным
аналитически.
Линия влияния продольного усилия N1-2.
Последовательно составляем уравнения равновесия правой и левой частей
фермы относительно моментной точки 3.
4d
∑ М 3прав = 0; RB ⋅ 4d + N1−2 ⋅ r1−2 = 0, откуда N1−2 = − r1−2 RB = −3,7 RB получаем уравнение левой ветки л. в.
2d
∑ М 3лев = 0; RА ⋅ 2d + N1−2 ⋅ r1−2 = 0, откуда N1−2 = r1−2 R A = −1,8R A получаем
уравнение правой ветки л. в.
Обе ветки пересекаются под моментной точкой 3. Передаточная прямая в
данном случае совпадает с левой веткой.
Из подобия треугольников определяем ординаты л. в. под узлами фермы и
производим расчет усилия в стержне 1−2.
N1−2 = P∑ yi = 6 ⋅ (− 3,7 / 6 − 7,4 / 6 − 1,85 / 2 − 3,7 / 6 − 1,85 / 6) = −22,2 кН.
Полученное значение продольного усилия полностью совпадает со значением, рассчитанным аналитически.
Линия влияния продольного усилия N1-4.
Последовательно составляем уравнения равновесия правой и левой частей
фермы относительно моментной точки 0.
9
∑ М 0прав = 0; RB ⋅ 9d − N1−4 ⋅ 4d = 0, откуда N1−4 = 4 RB = 2,25RB , получаем
уравнение левой ветки л. в.
3
∑ М 0лев = 0; RА ⋅ 3d + N1−4 ⋅ 4d = 0, откуда N 3−4 = − 4 R A = −0,75R A , получаем
уравнение правой ветки л. в.
29
Обе ветки пересекаются под моментной точкой 0. Передаточная прямая в
данном случае совпадает с правой веткой.
Из подобия треугольников определяем ординаты л. в. под узлами фермы и
производим расчет усилия в стержне 1−4.
N1−4 = P∑ yi = 6 ⋅ (2,25 / 6 − 3 / 6 − 2,25 / 6 − 1,5 / 6 − 0,75 / 6) = −5,25 кН.
Полученное значение продольного усилия полностью совпадает со значением, рассчитанным аналитически.
r1-2
k
N1-4
A
0
m 2
N1-2 n
h
1
N2-3
N1-3
h
r1-3
B
d 4
a=3d
k N3-4
n 3
0,9
m
ïåðåäàòî÷íàÿ ïðÿìàÿ
3,6/6
0,45
ëâ N1-3
0,9/6 ïðàâàÿ âåòâü
1,8/6
2,7/6
ëåâàÿ âåò
âü
2,7
7,5
åòâü
ëåâàÿ â
ëâ N4-3
1,5
7,5/6
6/6
3,7/6
1,85
3/6
1,85/2
3,7/6
ëâ N1-2
ëåâàÿ â
åòâü
3,7/3
ïðàâàÿ âåòâü
1,5/6 ïðàâàÿ âåòâü
4,5/6
ïåðåäàòî÷íàÿ ïðÿìàÿ
1,85/6
ëâ N1-4
ëåâàÿ âåòâü
2,25/6
3/6
0,75
2,25/6
1,5/6 ïðàâàÿ âåòâü 0,75/6
Рис. 25. Построение линий влияния усилий в ферме
Линия влияния продольного усилия N3-2 строится аналогично N1-4.
30
3,7
2,25
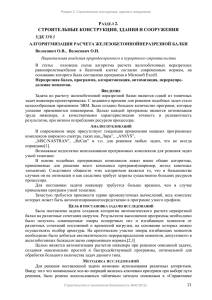
ЗАДАЧА № 4. РАСЧЕТ ШПРЕНГЕЛЬНОЙ ФЕРМЫ
Задание: Для шпренгельной фермы с выбранными по шифру из табл. 5
размерами и нагрузкой (рис. 26) требуется:
1) определить аналитически усилия в стержнях 3 и 4 категории заданной
панели от постоянной нагрузки.
2) построить л. в. для определения усилий в тех же стержнях от постоянной нагрузки и сравнить с п. 1.
3) определить по л. в. усилия в тех же стержнях от временной нагрузки и
найти величины максимальных и минимальных усилий.
4) определить максимальные и минимальные значения рассчитанных усилий для указанных стержней заданной панели (с учетом постоянной нагрузки).
Таблица 5
Числовые данные к задаче № 4
Первая цифра шифра
Длина панели d, м
Постоянная нагрузка qпост, кН/м
Вторая цифра шифра
Номер панели (считается слева)
h, м
Третья цифра шифра (номер схемы)
Временная нагрузка qвр, кН/м
1
2
3
4
5
6
7
8
9
0
3,0 3,2 3,5 4,0 4,5 3,6 3,8 4,2 3,4 4,4
200 225 250 180 210 220 190 185 195 205
1
2
3
4
5
6
7
8
9
0
3
2
5
4
3
2
5
4
3
2
3,5 3,8 4,2 3,0 3,6 3,4 4,0 3,2 4,4 3,8
1
2
3
4
5
6
7
8
9
0
400 450 500 550 700 600 650 750 800 350
2
h
h/2
1
h
d
d
4
h
h
h h
2 2
3
d
d
Рис. 26. Расчетные схемы к задаче № 4
31
5
6
h
h
h
2
d
d
8
h
h
h
5
3h
2
7
d
d
0
h
h
9
d
d
Рис. 26. Окончание
Методические указания к решению задачи № 4
В шпренгельных фермах с одноярусными (рис. 27, а) и двухъярусными
(рис. 27, б) шпренгелями следует различать стержни по категориям.
I категории – принадлежат только основной ферме 1−2, 2−3, 3−10, 2−13,
2−12 и т. д. (рис. 27, а), 1−13, 3−14 (рис. 27, б)
II категории – стержни, принадлежащие только шпренгелям 1−13, 1−14,
13−12 и т. д. (рис. 27, а), 2−13, 12−14 т. д. (рис. 27, б).
III категории – стержни, принадлежащие одновременно основной ферме и
шпренгелям 12−10, 13−11 и т. д. (рис. 27, а), 13−12, 1−2 и т. д. (рис. 27, б).
В фермах с двухъярусными шпренгелями имеются стержни IV категории –
это стойки, в которых происходит перераспределение усилий за счет передачи
нагрузки шпренгелем из верхнего пояса в нижний (или наоборот) 3−12, 5−11 и
т.д. (рис. 27, б).
Усилия в стержнях I и II категории удобно определять, если рассматривать
ферму, состоящую из двух подконструкций – основной фермы и фермочекшпренгелей. Усилия в стержнях III категории удобнее определять, рассматривая шпренгельную ферму как обычную.
32
После определения усилий в стержнях фермы аналитически необходимо
перейти к построению л. в. в указанных стержнях. Усилия в любом стержне
фермы можно определить по линии влияния, которые строятся по закону изменения опорных реакций от подвижной нагрузки Р = 1 (узловая нагрузка исключается как от полной нагрузки, так и временной), которую рассматриваем слева
и справа от сечения.
а)
б)
3
1
2
3
13
2
14
8
7
15
9
16
4
1
12
9
5
12
14
6
5
4
10
11
13
7
8
11
10
6
Рис. 27. Шпренгельные фермы
При построении л. в. учитывается узловая передача нагрузки, т. к. стержни
панели рассечены, и сила P = 1 не может находиться в таком стержне. При узловой передаче нагрузки линия влияния усилия определяемого стержня в пределах разрезанной панели представляет собой прямую, соединяющую вершины
ординат, расположенные под узлами разрезанной панели. Эта прямая называется передаточной прямой.
После построения л. в. определяют усилия в стержнях как от постоянной
нагрузки, так и от временной. От постоянной нагрузки усилия сравнивают с
усилиями, полученными аналитически. От временной нагрузки определяют
максимальные и минимальные значения усилий.
Полученные данные заносят в таблицу и определяют расчетные усилия.
Пример решения задачи № 4
Рассмотрим решение задачи на примерах шпренгельных ферм с одноярусными и двухярусными шпренгелями.
2
h
1
6
A
B
d
5
4
3
Рис. 28. Схема фермы с одноярусными шпренгелями
33
Схема сложной фермы
с одноярусными шпренгелями
представлена
на
рис. 28.
qпост = 200 кН/м,
d = 4 м, h = 6 м,
qвр = 600 кН/м.
h
В этой ферме стержни 1−2, 2−3, 1−5, 1−6 – стержни первой категории.
Стержни 5−6, 4−6 – стержни второй категории, и стержни 6−3, 5−4, 4−3 –
стержни третьей категории.
Определяем реакции в
опорах. Ввиду симметрии
фермы
q ⋅ 4d 200 ⋅ 4 ⋅ 4
R A = RB = пост
=
=
2
2
RB
RA
= 1600 кН.
Приводим
постоянную
B
d
A
нагрузку
к
узловой
P
P
P
P
P
P
P
P
P
d
4
2
2
P = qпост = 200 = 400 кН
2
2
Рис. 29. Приведение нагрузки к узловой
(рис. 29).
h
Для аналитического расчета продольных усилий в стержнях I категории
удаляем шпренгели, при этом нагрузку со шпренгелей распределяем на узлы
основной фермы Р0 = 800 кН (рис. 30).
Продольное усилие в стержне 1−2.
Проводим сечение n−n, рассматриваем равновесие левой части фермы.
Моментной точкой является узел 3.
P
∑ М 3лев = 0; − RA ⋅ 2d + 20 ⋅ 2d + P0 ⋅ d − N1−2 ⋅ r1−2 = 0.
h
r1− 2 = 2d ⋅ sin α, т.к. α = arctg
= 36,87 0 , то r1− 2 = 4,8 м.
2d
− 1600 ⋅ 8 + 400 ⋅ 8 + 800 ⋅ 4
N1−2 =
= −1333,3 кН.
4,8
2
n
N1-2
N2-3
1
r1-6
k
r
RA
A
P0
2
B
N1-6
N1-5
d
RB
α
1-2
6
5
n
k
3
P0 =800
P0 =800
P0 =800
P0
2
Рис. 30. Схема определения усилий в стержнях 1-й категории основной системы
34
Продольное усилие в стержне 1−6.
Моментной точкой является узел А. r1−6 = r1− 2 = 4,8 м.
∑М
лев
А
= 0; − P0 ⋅ d − N1−6 ⋅ r1−6 = 0, ⇒ N1−6 = −666,7 кН.
Продольное усилие в стержне 1−5.
Проводим сечение k−k, рассматриваем равновесие левой части фермы.
Моментной точкой является узел А.
∑ М Алев = 0; N1−5 ⋅ d − P0 ⋅ d = 0, ⇒ N1−5 = 800 кН.
Усилие N1-5 можно определить методом вырезания узлов, имеем частный
случай равновесия узла, когда в трехстержневом узле вдоль одиночного стержня 1−5 действует сила Р0.
Продольное усилие в стержне 2−3.
y
Используем метод вырезания узлов (рис. 31).
Составляем уравнение равновесия сил относи0
тельно вертикальной оси у.
2
90 -α
∑ y = 0; − 2 N1−2 ⋅ sin α − N 2−3 = 0.
N1-2
N 2−3 = −2 N1−2 sin α = −2(−1333,3) sin 36,87 0 =
N1-2
N2-3
= 1600 кН.
Рис. 31. Схема вырезания узла
Для определения усилий в стержнях II категории рассмотрим только фермочку-шпренгель (рис. 32).
Продольное усилие в стержне 4−6.
Частный случай равновесия трехстержневого узла. N 4−6 = P = 400 кН.
6
R5 =P/2 N5-6
5 å
d=4
N4-6
R3 =P/2
α
å
4
3
P=400 êÍ
Продольное усилие в стержне 5−6.
Проводим сечение е−е.
∑ y лев = 0; R5 + N 5−6 sin α = 0.
N 5− 6 = −
R5
400
=−
= −333,3 кН.
sin α
2 ⋅ sin 36,87
Рис. 32. Фермочка-шпренгель
Для определения усилий в стержнях III категории рассматриваем ферму
как единую конструкцию (рис. 33.). Проводим сечение m−m.
35
2
m
h
1
6
3-6
r
RA
A
P
2
d
5
N3-6
4 N3-4 3
P
RB
B
P
2
Рис. 33. Схема определения усилий в стержнях III категории
Продольное усилие в стержне 3−4.
Моментная точка – узел 1. Рассматриваем равновесие левой части фермы.
P
h
∑ М 1лев = 0; −R A ⋅ d + 2 ⋅ d + P ⋅ d − P ⋅ d + N 3−4 ⋅ 2 = 0.
R ⋅ d − ( P / 2) ⋅ d 1600 ⋅ 4 − 200 ⋅ 4
=
= 1867 кН.
N 4 −3 = A
( h / 2)
3
Продольное усилие в стержне 3−6.
Моментная точка – узел А.
3 ⎞
⎛d
∑ М Алев = 0; P ⋅ ⎜⎝ 2 + d + 2 d ⎟⎠ + N 3−6 ⋅ r3−6 = 0. r3-6 = 4,8 м.
N 3−6 = −1000 кН.
Построение л. в. усилий в стержнях I категории. Снимаем все внешние нагрузки с фермы и рассматриваем движение груза Р = 1 по нижнему поясу фермы (рис. 34).
Линия влияния усилия N1-2.
Проводим сечение n−n. Груз Р = 1 находится слева от сечения, рассматриваем равновесие правой части фермы для построения левой ветви л. в. Моментной точкой является узел 3.
2d
8
∑ М 3прав = 0; RB ⋅ 2d + N1−2 ⋅ r1−2 = 0, N1−2 = − r RB = − 4,8 RB = −1,67 RB .
1− 2
Получаем уравнение левой ветки л. в., из которого видно, что она изменяется по закону опорной реакции RВ, но ее ординаты нужно умножить на отрицательное число 1,67.
36
2
n
N1-2
1
r1-6
6
RB
α
r1-2
B
N1-6
N1-5
d
1,67
h
k
RA
A
N2-3
5
n
k
ω1-2
3
ëâ N1-2
ïðàâàÿ âåòâü
ëåâàÿ âåòâü
0,833
ïåðåäàòî÷íàÿ ïðÿìàÿ
ω1-6
ëåâàÿ âåòâü
ëâ N1-6
ïðàâàÿ âåòâü
0,833
ïåðåäàòî÷íàÿ ïðÿìàÿ
ëâ N1-5
ïåðåäàòî÷íàÿ ïðÿìàÿ
ü
ëåâàÿ âåòâ
ω2-3
3,33
4
1
ω1-5
2
1,67
ïðàâàÿ âåòâü
2
âü
ëåâàÿ âåò
1 ïðàâàÿ â
åòâü
ëâ N2-3
Рис. 34. Схема построения линий влияния в стержнях I категории
Груз Р = 1 находится справа от сечения, рассматриваем равновесие левой
части фермы относительно узла 3.
2d
∑ М 3лев = 0; R А ⋅ 2d + N1−2 ⋅ r1−2 = 0, N1−2 = − r R А = −1,67 R А .
1− 2
Получаем уравнение правой ветки л. в., из которого видно, что она изменяется по закону опорной реакции RА, но ее ординаты нужно умножить на отрицательное число 1,67.
Обе ветки пересекаются под моментной точкой. Учитывая узловой метод
передачи нагрузки переносим узел 5 на левую ветвь, а узел 3 на правую − получаем передаточную прямую.
37
Линия влияния усилия N1-6.
Моментной точкой является узел А. Последовательно рассматриваем положение груза Р = 1 слева и справа то сечения n−n. Составляем уравнения равновесия правой и левой частей фермы.
Уравнение левой ветви л. в.:
4d
16
∑ М Aправ = 0; RB ⋅ 4d + N1−6 ⋅ r1−6 = 0, N1−6 = − r RB = − 4,8 RB = −3,33RB .
1− 6
Уравнение правой ветви: ∑ М Aлев = 0; R А ⋅ 0 + N1−6 ⋅ r1−6 = 0, N1−6 = 0.
Переносим узел 5 на левую ветвь, а узел 3 на правую − получаем передаточную прямую.
Линия влияния усилия N1-5.
Моментной точкой является узел А.
Уравнение левой ветви л. в.:
4d
∑ М Aправ = 0; RB ⋅ 4d − N1−5 ⋅ d = 0, N1−5 = d RB = 4 RB .
Уравнение правой ветви: ∑ М Aлев = 0; R А ⋅ 0 + N1−5 ⋅ d = 0, N1−5 = 0.
Переносим узел 5 на левую ветвь, а узел 3 на правую − получаем передаточную прямую.
Линия влияния усилия N2-3.
Т. к. N 2−3 = −2 N1−2 sin α , то ординаты линий влияния усилия N1-2 умножа0
ем на − 2 sin α = −2 ⋅ sin 36,87 и получаем требуемые ординаты.
Обе ветки л. в. пересекаются под узлом 1 с ординатой равной единице.
Построение л. в. в стержнях II категории (рис. 35).
Линия влияния усилия N4-6.
Если груз Р = 1 находится в узле 4, усилие N4-6 = 1. Под узлом откладываем
ординату, равную единице. Груз, находящийся слева и справа от узла 4 не вызывает усилия в стойке. Л.в. N4-6 захватывает только одну панель в пределах
фермочки-шпренгеля.
R5
N5-6
N4-6
α
6
å
5 å
4
ω5-6
0,83
ω4-6
R3
Линия влияния усилия N5-6.
Условие равновесия на вертикальную
ось у:
∑ y = N 5−6 sin α + R5 = 0.
d=4 3
P=1
1
R5 = R3 = 0,5.
R
1
N 5− 6 = − 5 = −
= −0,83.
sin α
2 sin 36,87 0
Если груз Р = 1 находится вне узла 4, то
л. в. N5-6 = 0.
ëâ N5-6
ëâ N4-6
Рис. 35. Фермочка-шпренгель
38
Построение л. в. в стержнях III категории (рис. 36).
2
m
h
1
6
3-6
r
RA
A
d
5
4 N3-4 3
4
åòâü
â
ÿ
à
â
ëå
ëâ N3-4
2/3 ïðàâàÿ âåòâü
ω3-4
3/2
4/3
ω3-6
RB
B
N3-6
ëâ N3-6
ïåðåäàòî÷íàÿ ïðÿìàÿ
ïðàâàÿ âåòâü
ïåðåäàòî÷íàÿ ïðÿìàÿ
1,25
ëåâàÿ â
åòâü
3,33
Рис. 36. Схема построения линий влияния в стержнях III категории
Линия влияния усилия N3-4.
Моментной точкой является узел 1.
Уравнение левой ветви л. в.:
∑М
прав
1
= 0; − R B ⋅ 3d + N 3− 4 ⋅ h / 2 = 0, N 3− 4 =
3d
RB = 4 RB .
h/2
Уравнение правой ветви:
d
4
RA = RA .
h/2
3
Переносим узел 4 на левую ветку л. в., узел 3 – на правую, получаем передаточную прямую.
∑М
лев
1
= 0; − R А ⋅ d + N 3− 4 ⋅ h / 2 = 0, N 3− 4 =
Линия влияния усилия N3-6.
Моментной точкой является узел А.
Уравнение левой ветви л. в.:
∑М
прав
A
= 0; − RB ⋅ 4d − N 3−6 ⋅ r3−6 = 0, N 3−6 = −
4d
RB = −3,33RB .
r1−6
Уравнение правой ветви:
∑ М Aлев = 0; R А ⋅ 0 + N 3−6 ⋅ r3−6 = 0, N 3−6 = 0.
Переносим узел 4 на левую ветвь, а узел 3 на правую − получаем передаточную прямую.
39
Численные значения усилий в стержнях фермы 2-й панели от постоянной и
временной нагрузки определим по формуле (1), используя только слагаемое с
распределенной нагрузкой. Результаты расчетов занесем в таблицу 6.
1
N1пост
0,833 ⋅ 4 ⋅ 4 ⋅ 200 = −1333 кН.
− 2 = ω1− 2 ⋅ q пост = −
2
1
N1вр−2 = ω1−2 ⋅ qвр = − 0,833 ⋅ 4 ⋅ 4 ⋅ 600 = −4000 кН.
2
1
N1пост
0,833 ⋅ 2 ⋅ 4 ⋅ 200 = −666,4 кН.
−6 = ω1−6 ⋅ q пост = −
2
1
N1вр−6 = ω1−6 ⋅ qвр = − 0,833 ⋅ 4 ⋅ 2 ⋅ 600 = −2000 кН.
2
1
N1пост
⋅1 ⋅ 4 ⋅ 2 ⋅ 200 = 800 кН.
−5 = ω1−5 ⋅ q пост =
2
1
N1вр−5 = ω1−5 ⋅ qвр = ⋅1 ⋅ 4 ⋅ 2 ⋅ 600 = 2400 кН.
2
1
N 2пост
⋅1 ⋅ 4 ⋅ 4 ⋅ 200 = 1600 кН.
−3 = ω 2 −3 ⋅ q пост =
2
1
N 2вр−3 = ω2−3 ⋅ qвр = ⋅1 ⋅ 4 ⋅ 4 ⋅ 600 = 5400 кН.
2
1
N 5пост
⋅ 4 ⋅ 0,83 ⋅ 200 = −333 кН.
− 6 = ω5−6 ⋅ q пост = −
2
1
N 5вр−6 = ω5−6 ⋅ qвр = − ⋅ 4 ⋅ 0,83 ⋅ 600 = −999 кН.
2
1
N 4пост
⋅1 ⋅ 4 ⋅ 2 ⋅ 200 = 400 кН.
− 6 = ω 4− 6 ⋅ q пост =
2
1
N 4вр−6 = ω4−6 ⋅ qвр = ⋅1 ⋅ 4 ⋅ 2 ⋅ 600 = 1200 кН.
2
⎞
⎛1 3
1 2
⎛ 3/ 2 + 2 / 3 ⎞
6
2
2
4
N 3пост
⋅
+
⋅
⋅
⋅
⋅
⋅
+
⎟⎟ ⋅ 200 = 1867 кН.
⎟
⎜
− 4 = ω3− 4 ⋅ q пост = ⎜
⎜2 6
2
2
3
⎠
⎝
⎠
⎝
⎞
⎛1 3
1 2
⎛ 3/ 2 + 2 / 3 ⎞
N 3вр−4 = ω3−4 ⋅ qвр = ⎜⎜ ⋅ ⋅ 6 + ⎜
⎟ ⋅ 2 + ⋅ ⋅ 2 ⋅ 4 ⎟⎟ ⋅ 600 = 5600 кН.
2
2 3
⎠
⎝
⎠
⎝2 6
1
N 3пост
⋅1,25 ⋅ 4 ⋅ 2 ⋅ 200 = −1000 кН.
− 6 = ω3− 6 ⋅ q пост = −
2
1
N 3вр−6 = ω34−6 ⋅ qвр = − ⋅1,25 ⋅ 4 ⋅ 2 ⋅ 600 = −3000 кН.
2
40
Таблица 6
Результаты расчета шпренгельной фермы
Усилия от постоянной нагрузки, кН
−1333,3
−666,7
800,0
1600,0
−333,3
400,0
1867,0
−1000,0
Наименование
стержней
Стержень 1−2
Стержень 1−6
Стержень 1−5
Стержень 2−3
Стержень 5−6
Стержень 4−6
Стержень 3−4
Стержень 3−6
Усилия от временной
нагрузки, кН
max
min
−4000
−
−2000
−
2400
−
5400
−
−999
−
1200
−
5600
−
−3000
−
Расчетные усилия, кН
max
−
−
3200
7000
−
1600
7467
−
min
−5333,3
−2666,7
−
−
−1332,3
−
−
−4000
В ферме с двухъярусными шпренгелями (рис. 37) рассмотрим определение
усилий и построение линий влияния усилий в стержнях II и IV категории. Примем qпост = 200 кН/м, d = 4 м, h = 6 м, qвр = 600 кН/м.
6d ⋅ qпост
d
4
R A = RB =
= 2400 кН. P = qпост = 200 = 400 кН .
2
2
2
К стержням II категории относятся стержни 3−6 и 5−6. Выделим из конструкции отдельно фермочку−шпренгель (рис. 38).
2
3
h
6
RA
RB
P/2
P
P
P
P
P
1
P
5
P
4
d
P
P
P
P
P/2
Рис. 37. Расчетная схема фермы с двух ярусными шпренгелями
2
R3 =P/2
3
h
α
R2 =P/2
N3-6
6
N5-6
1
4
5
P
Рис. 38. Расчетная схема
двухъярусного шпренгеля
Продольное усилие в стержне 5−6.
Частный случай равновесия трехстержневого узла N 5−6 = P = 400 кН.
Продольное усилие в стержне 3−6.
Вырезаем узел 3, рассматриваем условие
∑ y = 0.
R3 − N 3−6 sin α = 0. Т. к. R3 = Р/2,
3
P
α = arctg = 56,30 , то N 3−6 =
=
2
2 sin α
= 240,4 кН.
41
Построим л. в. усилий в стержнях II категории (рис. 39) и определим по
ним усилия от постоянной и временной нагрузок.
d
R2 =1/2
R3 =1/2
3
h
α
2
N3-6
6
N5-6
1
4
N 5пост
− 6 = ω5−6 ⋅ q пост =
5
ω5-6
1
1
ω3-6
0,6
Линия влияния усилия N5-6.
Если груз Р = 1 находится в узле 5, усилие
N5-6 = 1. Под узлом откладываем ординату,
равную единице. Груз, находящийся слева и
справа от узла 5 не вызывает усилия в стойке. Л.в. N5-6 захватывает только одну панель
в пределах фермочки-шпренгеля.
ëâ N5-6
ëâ N3-6
N 5вр−6 = ω5−6 ⋅ qвр =
1
⋅ 4 ⋅1 ⋅ 200 = 400 кН.
2
1
⋅ 4 ⋅1 ⋅ 600 = 1200 кН.
2
Линия влияния усилия N3-6.
Условие равновесия на вертикальную ось у:
∑ y прав = R3 − N 3−6 sin α = 0.
Уравнение линии влияния
1
N 3− 6 =
= 0,6.
2 sin α
Если груз Р = 1 находится вне узла 5, то ордината л. в. N3-6 = 0.
Рис. 39. Линии влияния усилий
в стержнях II категории
N 3пост
− 6 = ω3− 6 ⋅ q пост =
N 3вр−6 = ω3−6 ⋅ qвр =
1
⋅ 4 ⋅ 0,6 ⋅ 200 = 240 кН.
2
1
⋅ 4 ⋅ 0,6 ⋅ 600 = 720 кН.
2
К стержням IV категории относятся стойки 1−2 и 3−4, эти стойки являются стержнями основной фермы, поэтому шпренгели не оказывают влияние на
усилия в этих стержнях (рис. 40).
Продольное усилие в стержне 3−4.
Рассекаем ферму сквозным сечением g−g. Рассматриваем левую часть фермы,
используем метод проекций для определения усилия N3-4.
∑ y прав = RB − 3P − P / 2 − N 3−4 = 0; N 3−4 = RB − 3P − P / 2 = 2400 − 3 ⋅ 400 − 200 = 1000 кН.
Продольное усилие в стержне 1−2.
Вырезаем узел 1. Рассматривая частный случай равновесия трехстержневого узла, находим, что N1-2 = Р = 400 кН.
42
N1-2
RA
1
P/2
P
P
P
P
P
P
g
3
6
h
2
N3-4
5
P
4g
P
P
RB
P
P
P/2
Рис. 40. Схема определения усилий в стержнях IV категории
Построение л. в. усилий в стержнях IV категории производится следующим образом. Вначале для основной фермы строится л. в. усилия в рассматриваемом стержне фермы при перемещении единичного груза по узлам одного
пояса (например верхнего). А затем строится линия влияния этого же усилия по
узлам другого пояса. Различие в этих линиях влияния связано с тем, что с изменением грузового пояса меняются разрезанные панели. Перемещая единичный
груз по грузовому поясу шпренгельной фермы, устанавливаем закон изменения
усилия с учетом того, что нагрузка, расположенная в дополнительных узлах,
при помощи двухъярусных шпренгелей передается из узлов грузового пояса в
узлы не грузового пояса.
Линия влияния усилия N3-4.
Проводим сечение g−g (рис. 41). Груз Р = 1 находится справа от сечения,
рассматриваем равновесие левой части фермы:
∑ y лев = 0; N 3−4 + R A = 0; N 3−4 = − R A . Получаем уравнение правой ветви
л. в. Под опорой А устанавливаем ординату единица и соединяем с нулем под
опорой В.
Груз Р = 1 находится слева от сечения, рассматриваем равновесие правой
части фермы:
∑ y прав = 0; − N 3−4 + RB = 0; N 3−4 = RB . Получаем уравнение левой ветви
л. в. Под опорой В устанавливаем ординату минус единица и соединяем с нулем под опорой А.
Пусть груз Р = 1 перемещается по верхнему поясу. Переносим на левую
ветвь крайний левый узел перерезанной панели (2), а на правую ветвь – крайний правый (узел 3). Получаем передаточную прямую (2’−3’) при езде поверху.
Аналогично получаем передаточную прямую при перемещении груза
Р = 1 по нижнему поясу (4’−7’).
С учетом работы шпренгелей на прямую 2’−3’ переносим узел 5, на прямую 4’−7’ переносим узел 8. Соединяем точки и получаем л. в. N3-4.
43
1
0,0835 + 0,5
0,0835 + 2 / 3
1 2
⋅ 2 + ⋅ ⋅ 3,22 −
⋅2+
N 3пост
− 4 = ω3− 4 ⋅ q пост = ( ⋅ 0,5 ⋅ 3 ⋅ 4 +
2
2
2
2 3
1
1
− ⋅ 4,78 ⋅ ) ⋅ 200 = 5 ⋅ 200 = 1000 кН.
2
6
вр
N 3−4 = ω3−4 ⋅ qвр = 5 ⋅ 600 = 3000 кH.
g
2
h
6
N1-2
N3-4
A
9
åçäà ïîíèçó
3
1
B
4
5
g
8
1
4'
2'
âü
ëåâàÿ âåò
5'
0,0835
ω3-4
1
òâü
ïðàâàÿ âå
ω1-2
7
8'
3'
ëâ N3-4
7' 0,78
åçäà ïîâåðõó
1
ëâ N1-2
Рис. 41. Построение л. в. усилий в стержнях IV категории
Линия влияния усилия N1-2.
Стержень 1−2 можно отнести как к стержням IV категории, так и к стержням I категории. Проще задачу решить как для стержня I категории способом
вырезания узлов. На основании частных случаев равновесия узлов N1-2 = 0, если
сила Р = 1 находится вне узла 1 и N1-2 = 1, если сила находится в узле 1. Перерезанными панелями являются панели 1−9 и 1−5.
1
N1пост
⋅ 4 ⋅1 ⋅ 200 = 400 кН.
− 2 = ω1− 2 ⋅ qпост =
2
1
N1вр−2 = ω1−2 ⋅ qвр = ⋅ 4 ⋅1 ⋅ 600 = 1200 кН.
2
44
ЗАДАЧА № 5. РАСЧЕТ ПЛОСКОЙ СТАТИЧЕСКИ
НЕОПРЕДЕЛИМОЙ РАМЫ МЕТОДОМ СИЛ
Задание. Для статически неопределимой рамы с выбранной по шифру из
таблицы 7 размерами и нагрузкой (рис. 42) требуется:
1) построить эпюры M, Q, N.
2) выполнить статическую и кинематическую проверку рамы.
Таблица 7
Числовые данные к задаче № 5
Первая цифра шифра
Р1, кН
Р2, кН
Р3, кН
l, м
Вторая цифра шифра
q1, кН/м
q2, кН/м
q3, кН/м
h, м
Третья цифра шифра
(номер схемы)
J2 : J1
1
4
0
0
8
1
0
2
0
10
2
0
6
0
12
2
0
0
1
8
3
0
0
8
10
3
4
0
0
6
4
6
0
0
14
4
0
1
0
12
5
0
4
0
12
5
0
0
4
8
6
0
0
2
8
6
2
0
0
10
7
8
0
0
10
7
0
4
0
6
8
0
2
0
14
8
0
0
2
12
9
0
0
4
8
9
1
0
0
10
0
4
0
0
10
0
0
1
0
8
1
2
3
4
5
6
7
8
9
0
1:2
2:3
1:3
1:3
2:3
2:1
3:2
3:4
1:2
1:3
Методические указания решению задачи № 5
Для расчета рамы методом сил следует предварительно найти степень статической неопределимости (ССН) и выбрать основную систему (ОС), которая
получается путем удаления «лишних» связей.
Основную систему нужно стараться выбирать симметричную или применять группировку неизвестных, что приводит к упрощению расчетов.
Действие лишних связей заменяют неизвестными усилиями Хi,. Для их определения составляются канонические уравнения метода сил
δ11 X 1 + δ12 X 2 + δ13 X 3 + ... + δ1n X n + ∆1P = 0,
δ 21 X 1 + δ 22 X 2 + δ 23 X 3 + ... + δ 2 n X n + ∆ 2 P = 0,
....................................................................
δ n1 X 1 + δ n 2 X 2 + δ n3 X 3 + ... + δ nn X n + ∆ nP = 0.
(8)
где Х1, Х2,…, Хn – неизвестные усилия, ∆1Р,…, ∆nР – перемещения в направлении
неизвестных Х1, Х2,…, Хn, вызванные действием внешней нагрузки, δ11, … ,δnn −
перемещения в направлении неизвестных Х1, Х2,…, Хn, вызванные действием
единичной нагрузки.
45
1
2
l/2
q1
q2
J2
J1
q2
q3
h/4
h/2
J2
J1
P1
h/2
P3
J2
P2
l/4
J2
J1
l/4
P3
h/4
P1
q3
q1
h/2
J1
h/4
l/4
P2
J2
l/2
h/2
l/2
l
l/2
4
3
l/8
q1
h/4
h/2
q2
J2
P3
J2
l/8
P2
l/2
h
P1
J2
q3
l/2
l/4
l/4
6
J1
q3
P1
P2
J1
q2
P3
l/2
J2
l/2
Рис. 42. Расчетные схемы к задаче № 5
46
J2
q3
h/2
q1
l/4
J1
h/2
l/2
J2
J2
h/2
h/2
P2
J2
h/4
h/4
J1
q1
h/2
l/4
P1
h/2
q2
P3
J1
l/2
l/4
P3
J2
5
J2
q1
J1
q2
q3
P2
q1
h/2
l/4
J1
J1
P1
q3
l/2
8
q2
P3
l/4
P2
J2
J2
J1
q3
J1
J1
J2
q2
J1
l/2
l/4
P2
h/2
q3
q1
P1
P3
h/2
h
P1
J1
J1
l/4
h/4
J1
q1
h/2
7
l/2
l/2
9
l/2
0
J2
J1
P3
P1
q3
J1
l/4
h/2
q1
P1
h
q2
P2
h/2
J1
J2
l/4
l/4
P2
J1
P3
h/2
q3
q2
q1
l/4
J1
J1
l/2
l/2
l/2
l/2
J2
Рис. 42. Окончание
Коэффициенты при неизвестных и свободные (грузовые) члены канонических уравнений метода сил определяются по формулам
l
2
M i ⋅ dx
,
δii = ∑ ∫
EJ
n 0
l
M ⋅ M j ⋅ dx
δij = ∑ ∫ i
,
EJ
n 0
l
δ ip = ∑ ∫
n 0
M i ⋅ M p ⋅ dx
EJ
,
(9)
где М i , M j , M p – изгибающие моменты, возникающие в ОС соответственно
от сил Хi = 1, Хj = 1 и заданной нагрузки.
После определения δii и δij проводят проверку правильности их вычисления
по формуле
l
M s2 ⋅ dx
,
δ ii + 2δ ij + δ jj = ∑ ∫
EJ
n 0
(
(10)
)
где M s – суммарная единичная эпюра M s ⋅ M s = M s2 .
47
После определения свободных (грузовых членов) также производится проверка их вычисления по формуле
l
∑ ∆ ip =∑ ∫
Ms ⋅M p
dx.
(11)
EJ
0
Убедившись в правильности определения коэффициентов и свободных
членов, составляем каноническое уравнение и определяем истинные значения
неизвестных метода сил Х1, Х2, …, Хn.
Для построения эпюр M, Q и N необходимо определить реакции опор в ОС
с учетом найденных Хn и заданной нагрузки, затем рассчитать основную систему как статически определимую и далее рассматривать в отдельности каждый
стержень с определением M, Q и N.
Второй способ построения эпюр M, Q и N основан на принципе независимости действия сил. Окончательная эпюра изгибающих моментов строится как
алгебраическая сумма исправленных единичных эпюр M i X i с грузовой эпюОкончательная
эпюра
изгибающих
моментов:
рой
Мр.
0
M ок = M 1 X 1 + M 2 X 2 + M 3 X 3 + ... + M n X n + M p .
Построив Мок следует убедиться, что все узлы рамы уравновешены, т.е. в
каждом жестком узле рамы сумма моментов должны быть равна нулю.
Обязательно следует провести кинематическую проверку по формуле
M ⋅M s
(12)
∑ ∫ окEJ dx = 0.
Положительный результат кинематической проверки является достаточным условием правильности построения окончательной эпюры моментов.
Относительная погрешность определяется по формуле
ε=
A− B
min{A, B}
⋅ 100% ≤ 2%,
(13)
где А – сумма слагаемых с положительным знаком, В – сумма по абсолютной
величине слагаемых с отрицательным знаком, min {А, В} – наименьшее значение по абсолютной величине из двух сумм А и В.
Затем по эпюре Мок строим эпюру поперечных сил Q, рассматривая каждый стержень в отдельности.
Поперечные силы на участке рамы длиной l определяются по формулам:
М пр − М лев ql
М пр − М лев ql
Q =
− , Q лев =
+ ,
(14)
l
2
2
l
где Мпр – величина изгибающего момента справа на участке, Млев – величина
изгибающего момента слева, q – интенсивность распределенной нагрузки.
Если распределенной нагрузки на ригеле или стойке нет, то поперечная
сила постоянна и определяется по формуле
пр
48
Q=
М пр − М лев
.
l
(15)
По эпюре Q строим эпюру N, рассматривая каждый узел в отдельности,
начиная с узла, в котором сходятся не более двух стержней.
По эпюрам поперечных и продольных сил определяются реакции в опорах
внешних связей, которые являлись необходимыми связями в основной системе.
После определения всех реакций в связях проводят статическую проверку
рамы по формулам ∑ x = 0; ∑ y = 0, ∑ M = 0.
Приведенные выше интегралы определяются по правилу Верещагина или
по справочным таблицам выражений интеграла Мора ∫ M i M p dx для различных сочетаний эпюр (табл. 8).
Таблица 8
Выражения интеграла Мора ∫ M i M p dx для различных сочетаний эпюр
Эпюра M i
Эпюра M p
h0
h
h
h2
h1
l/ 2
(
)
(
)
(
(
)
1
h h1 + 2h 2 ⋅ l
6
1
h 2h1 + h 2 ⋅ l
6
1
hhl
2
1
hhl
2
1
hhl
3
1
(h1 + h2 )hl
2
1
(h1 + 2h2 )hl
6
1
[h1 2h1 + h 2 +
6
+ h2 2h 2 + h1 ] ⋅ l
1
hhl
2
1
(1 + α )hhl
6
1
[(1 + β)h1 +
6
+ (1 + α )h 2 ] ⋅ hl
1
(h2 − h1 )hl
2
1
(2h2 − h1 )h ⋅ l
6
1
[ h2 2 h 2 + h 1 −
6
− h1 2h1 + h 2 ] ⋅ l
1
hhl
3
1
hhl
4
h
1
hhl
3
1
hhl
12
1
h h1 + 3h 2 ⋅ l
12
1
h 3h1 + h 2 ⋅ l
12
h
2
hhl
3
1
hhl
3
1
h h1 + h 2 ⋅ l
3
2
hhl
3
5
hhl
12
1
h 3h1 + 5h 2 ⋅ l
12
2
hhl
3
1
hhl
4
1
h 5h1 + 3h 2 ⋅ l
12
h
h
h2
h1
h
αl
βl
h2
h1
h
h
h
1
hhl
6
49
)
(
(
)
)
(
)
(
)
(
)
(
)
(
)
Пример решения задачи № 5
Схема рамы (заданная система ЗС) представлена на рис. 43, а.
J1 : J2 = 3 : 4, J1 – жесткость вертикальных стоек, J2 – жесткость ригелей.
Определяем степень статической неопределимости рамы по формуле
n = 3K + 2 Ш + С 0 − 3D,
(16)
где К – число замкнутых контуров, С0 – число опорных стержней, Ш – число
простых шарниров, D – число дисков.
n = 3 ⋅ 0 + 2 ⋅ 0 + 5 − 3 ⋅ 1 = 2. Система имеет две «лишние» связи.
Выбираем основную систему (ОС) метода сил путем удаления одного вертикального и одного горизонтального опорного стержня (рис. 43, б). Действие
удаленных связей заменяем неизвестными усилиями Х1 и Х2.
Обозначим жесткость стоек через J1 = J, тогда жесткость ригелей составит
J2 = (3/4)J.
б)
а)
q=1 êÍ/ì
E
J2
P2 =6 êÍ
(3/4)J
P1 =4 êÍ
J1
ÇÑ
P2 =6 êÍ
C
F
A
C
l/4
ÎÑ
B
l=8 ì
P1 =4 êÍ
J
h/2
h=10 ì
D
q=1 êÍ/ì
A
X2
B
X1
l/2
Рис. 43. Заданная и основная схема рамы
Система канонических уравнений метода сил:
δ11 X 1 + δ12 X 2 + ∆1P = 0;
δ 21 X 1 + δ 22 X 2 + ∆ 2 P = 0.
Последовательно загружаем основную систему силами Х1 = 1, Х2 = 1, строим единичные эпюры M 1 , M 2 (рис. 44, а и б). По единичным эпюрам вычисляем коэффициенты при неизвестных.
При построении единичной эпюры M 2 в основной системе определили
oc
oc
реакции R A ; R B из уравнений моментов сил относительно опор А и В.
δ11 = ∑ ∫
M1 ⋅M1
1 10 ⋅10 ⋅10 10 ⋅ 8 ⋅ 10 1 10 ⋅10 ⋅ 10 5200
dx = ⋅
+
+ ⋅
=
.
EJ
EJ
EJ
3
(3 / 4) EJ 3
3EJ
50
б)
а)
10
10
4
10
Õ2 =1
Ì2
5
Ì1
A
îñ
ÍÀ =1
A
44
B
Õ1 =1
2
B
îñ
RÀ =0,5 êÍ
îñ
R =1,5 êÍ
Рис. 44. Эпюры моментов от единичных воздействий
δ 22 = ∑ ∫
M 2 ⋅M 2
1 4 ⋅8⋅ 4
4⋅5⋅ 4 1 4⋅ 4⋅ 4
1488
dx = ⋅
+
+ ⋅
=
.
EJ
EJ
3 (3 / 4) EJ
3 (3 / 4) EJ 9 EJ
M1 ⋅M 2
1 10 ⋅ 8 ⋅ 4 (5 + 10) 4 ⋅ 5
2180
dx = − ⋅
−
=−
.
EJ
EJ
2 (3 / 4) EJ
2
6 EJ
Проверка правильности определения коэффициентов по формуле (10).
δ12 = δ 21 = ∑ ∫
∑δ
ij
= δ11 + δ 22 + 2δ12 =
2180 1172
5200 1488
+
−2
=
.
EJ
6 EJ
3EJ 9 EJ
Суммарная единичная эпюра показана на рис. 45, а.
Умножаем суммарную единичную эпюру саму на себя:
∑
M S ⋅M S
1 10 ⋅10 ⋅10 1 ⎡10(2 ⋅10 + 6) + 6(2 ⋅ 6 + 10) ⎤
dx = ⋅
+ ⎢
⎥ ⋅8 +
EJ
3
EJ
6⎣
(3 / 4) EJ
⎦
1 ⎡ 6(2 ⋅ 6 + 1) + 1(2 ⋅1 + 6) ⎤
1 4 ⋅ 4 ⋅ 4 1 5 ⋅ 5 ⋅ 5 1172
+ ⎢
⋅5 + ⋅
+ ⋅
=
.
⎥
6⎣
EJ
3 (3 / 4) EJ 3 EJ
EJ
⎦
Результаты проверки совпали, следовательно коэффициенты при неизвестных вычислены верно.
Для определения свободных членов строим грузовую эпюру Мр в основной системе (рис. 45, б). Определяем реакции в опорах, используя уравнения
моментов сил:
∑М
∑М
ос
А
=0; − P2 ⋅ 5 − q ⋅ 8 ⋅ 4 − P1 ⋅10 + RBос ⋅ 8 = 0; RBос = 16,75 кН,
ос
B
=0; − P2 ⋅ 5 + q ⋅ 8 ⋅ 4 − P1 ⋅ 2 − R Aос ⋅ 8 = 0; R Aос = 3,25 кН.
Эпюру изгибающих моментов на ригеле длиной 8 м расслаиваем на параболу с ординатой (ql2)/8 и на перекрученную эпюру с ординатами 30 и 8.
51
M1 ⋅M p
1 30 ⋅ 5 ⋅ 5 5 + 10 30 ⋅ 5 (8 − 30) ⋅10 ⋅ 8
dx = − ⋅
−
⋅
+
−
3 EJ
2
2(3 / 4) EJ
EJ
EJ
2 8 ⋅10 ⋅ 8 (5 + 10) ⋅ 8 ⋅ 5
2817,22
− ⋅
+
=−
.
3 (3 / 4) EJ
2 EJ
EJ
∆ 1P = ∑ ∫
M 2 ⋅MP
1 (2 ⋅ (−8) + 30) ⋅ 4 ⋅ 8 1 8 ⋅ 4 ⋅ 8
dx = ⋅
+ ⋅
−
EJ
6
(3 / 4) EJ
3 (3 / 4) EJ
8 ⋅ 4 ⋅ 5 1 8 ⋅ (2 ⋅ 4 + 2) ⋅ 2 17,77
−
− ⋅
=
.
EJ
EJ
6
(3 / 4) EJ
∆ 2P = ∑ ∫
а)
б)
10
6
10
8
8
6
30
2
ql /8
30
1 5
5
ÌS
4
8
ÌP
2
A
A
B
8
30
B
8
îñ
HÀ =6 êÍ
îñ
RÀ =3,25 êÍ
îñ
R =16,75 êÍ
Рис. 45. Суммарная единичная и грузовая эпюра в основной системе
Производим проверку правильности определения свободных коэффициентов по условию
∑∆
∑∫
iP
=−
∑∆
iP
= ∑∫
M S ⋅MP
dx.
EJ
2817,22 17,77
2799,44
+
=−
.
EJ
EJ
EJ
M S ⋅MP
1 5 ⋅ 30 ⋅ 5 5 + 10 30 ⋅ 5 1 ⎡10(−30 ⋅ 2 + 8) + 6(8 ⋅ 2 − 30) ⎤
dx = − ⋅
−
⋅
+ ⎢
⎥ ⋅8 −
EJ
3
EJ
2
EJ
6⎣
(3 / 4) EJ
⎦
1 (10 + 6) ⋅ 8 ⋅ 8 6 + 1 8 ⋅ 5 1 (2 ⋅ 4 + 2) ⋅ 8 ⋅ 2
2799,44
− ⋅
+
⋅
− ⋅
=−
.
3 (3 / 4) EJ
2 EJ 6
(3 / 4) EJ
EJ
Результаты проверки совпали, следовательно свободные коэффициенты
вычислены верно.
Подставляем вычисленные значения коэффициентов в канонические уравнения:
52
5200
2180
2817,22
X1 −
X2 −
= 0;
EJ
3EJ
6 EJ
2180
1488
17,77
−
X1 +
X2 +
= 0.
6 EJ
9 EJ
EJ
Решаем систему уравнений и находим значения неизвестных усилий в удаленных «лишних» связях: Х1 = 2,97 кН, Х2 = 6,42 кН.
Значения неизвестных получено со знаком плюс, следовательно, предварительное направление их выбрано верно.
Строим исправленные эпюры моментов путем умножения единичных
эпюр M 1 и M 2 на найденные значения сил Х1 и Х2 (рис. 46, а и б).
Затем по формуле M ок = M 1 X 1 + M 2 X 2 + M 3 X 3 + ... + M n X n + M p определяем значения моментов в узлах рамы строим окончательную эпюру изгибающих моментов в заданной системе (рис. 46, в).
а)
б)
29,7
29,7
25,68
29,7
25,68
Ì2 ⋅X2
12,84
Ì1 ⋅X1
14,85
A
A
B
B
в)
12,02
D 0,3
0,3
V
E 12,02
D
0,3
2,83
IV
VI
15,15
E
8ì
17,68
I
F
C
14,85
=
D
0,3
+
12,84
17,68
VII
14,85
II
2,83
12,02
Óçåë F
III
Mîê
A
2
ql /8=8
B
Рис. 46. Исправленные и окончательная эпюра изгибающих моментов
53
12,02
E
Проверка окончательной эпюры изгибающих моментов:
1) Статическая проверка удовлетворяется, так как все узлы рамы находятся
в равновесии.
2) Кинематическая проверка по формуле (12):
М Мs
1 15,15 ⋅ 5 ⋅ 5 1 ⎡ 0,3(2 ⋅ 10 + 5) + 15,15(2 ⋅ 5 + 10 ) ⎤
∑ ∫ окEJ dx = − 3 ⋅ EJ − 6 ⎢⎣
⎥⎦ ⋅ 5 +
EJ
1 ⎡ − 0,3(2 ⋅10 + 6 ) + 12,02(2 ⋅ 6 + 10 ) ⎤
1 8(10 + 6 ) ⋅ 8 1 ⎡12,02(2 ⋅ 6 + 1 − 2,83(2 ⋅ 1 + 6 )) ⎤
+ ⎢
⋅8 −
+ ⎢
⎥
⎥⎦ ⋅ 5 +
EJ
6⎣
0,75 EJ
3 0,75 EJ
6⎣
⎦
1 14,85 ⋅ 5 ⋅ 5 1 12,84 ⋅ 2 ⋅ 2 1 ⎡12,84(2 ⋅ 2 + 4 ) + 17,68(2 ⋅ 4 + 2 ) ⎤
+ ⋅
+ ⋅
+ ⎢
⎥⋅2 =
EJ
3
3 0,75 EJ
6⎣
0,75 EJ
⎦
839,111 838,404
0,707
=−
+
=−
.
EJ
EJ
EJ
Относительная погрешность, вычисленная по формуле (15) составляет
ε=
A− B
min{A, B}
⋅100% =
0,707
⋅100% = 0,08%. Относительная погрешность мень838,404
ше допускаемых 2 %. Следовательно, эпюра Мок построена верно.
По окончательной эпюре изгибающих моментов строим эпюру поперечных сил (рис. 47). При рассмотрении участков мысленно становимся внутрь
рамы.
2,46
5,54
V
VI
2,46 ì
3,03
IV
II
2,97
VII
A
Q
М пр − М лев 0 − 12,84
QI =
=
= −6,42 кН.
lI
2
III
2,97
I
2,42
6,42
B
C
М пр − М лев 12,84 − 17,68
QII =
=
= −2,42 кН.
l II
2
QIII =
0 − (−14,85)
= 2,97 кН.
5
QIV =
2,83 − (−12,02)
= 2,97 кН.
5
Рис. 47. Эпюра поперечных сил
М пр − М лев qlV − 12,02 − 0,3 1⋅ 8
−
=
−
= −5,54 кН.
Q =
lV
2
8
2
пр
V
М пр − М лев qlV − 12,02 − 0,3 1⋅ 8
+
=
+
= 2,46 кН.
Q =
lV
2
8
2
Сечение ригеля с чистым изгибом находится на расстоянии RA/q = 2,46/1 =
= 2,46 м от левого узла рамы.
лев
V
54
В этом сечении изгибающий момент достигает экстремального значения,
величину момента рассчитаем по уравнению:
q ⋅ 2,46 2
M max = R A ⋅ 2,46 + 0,3 −
≈ 3,33 кН ⋅ м.
2
QVI =
М пр − М лев 15,15 − 0
М пр − М лев 0,3 − 15,15
=
= 3,03 кН.
=
= −2,97 кН. QVII =
l VII
5
l VI
5
Эпюру продольных сил строим по эпюре поперечных сил способом вырезания узлов. Двухстержневой узел D соединяет V и VI участки. Схема уравновешивания показана на рис. 48, а. Схема уравновешивания узлов Е и F по поперечным и продольным силам показана на рис. 48, б и в. При уравновешивании
трехстержневого узла следует приложить найденное значение продольной силы
с участка IV.
а)
в)
б)
ëåâ
ïð
NIV =5,54
QV =2,46
QV =5,54
NV =2,97
NV =2,97
QIV =2,97
D
E
F
QII =2,42
QIV =2,97
QVI =2,97
QVI =2,97
NIII =3,12
NVI =2,46
N =5,54
IV
Рис. 48. Схема уравновешивания узлов рамы продольными и поперечными силами
Эпюра продольной силы представлена на рис. 49, а. Произведем статическую проверку рамы. Нанесем на заданную схему рассчитанные реакции внешних связей (рис. 49, б) и проверим выполнение условий:
∑ y = 0; R A + RB + RC − qlV − P1 = 2,46 + 3,12 + 6,42 − 8 − 4 = 0;
∑ x = 0; P
∑ M = 0;
2
0
− H A − H B = 6 − 3,03 − 2,97 = 0;
− P1 ⋅ 6 + Rc ⋅ 8 − H B ⋅ 5 + RB ⋅ 4 − R A ⋅ 4 − H A ⋅ 5 = 0.
Условия выполняются, следовательно, рама статически уравновешена.
б)
а)
D
D
E
E
P1 =4 êÍ
2,97
5,54
F
P2 =6 êÍ
C
0
N
ÍÀ =3,03 êÍ
A
2,46
3,12
B
RÑ =6,42 êÍ
qlV =8 êÍ
A
RÀ =2,46 êÍ
C
F
B
Í =2,97 êÍ
R =3,12 êÍ
Рис. 49. Эпюра продольной силы и схема статической проверки рамы
55
ЗАДАЧА № 6. РАСЧЕТ НЕРАЗРЕЗНОЙ БАЛКИ С ИСПОЛЬЗОВАНИЕМ
УРАВНЕНИЯ ТРЕХ МОМЕНТОВ
Задание. Для неразрезной балки с выбранными по шифру (табл. 9) размерами и нагрузкой (см. рис. 50) требуется:
1) записать уравнение трех моментов и по уравнению рассчитать опорные
моменты;
2) построить эпюры М и Q;
3) выполнить кинематическую (деформационную) проверку построения
эпюры М и выполнить статическую проверку.
Таблица 9
Числовые данные к задаче № 6
Первая цифра шифра
l 1, м
b, м
q1, кН/м
Вторая цифра шифра
l 2, м
Р1, кН
с, м
q2, кН/м
Третья цифра шифра
(номер схемы)
l 3, м
Р2, кН
1
6
2
1,0
1
8
4,0
2
1,2
2
8
3
2,0
2
6
8,0
4
1,4
3
10
4
3,0
3
12
5,0
1,0
1,6
4
12
3
4,0
4
8
6
3
1,8
5
8
2
3,0
5
6
3
2
2,0
6
6
4
2,0
6
10
2
1
1,6
7
10
3
1,0
7
6
1
4
1,8
8
12
2
4,0
8
8
6
1
1,4
9
8
4
2,0
9
12
8
2
1,2
0
10
2
1,0
0
10
4
3
2,0
1
2
3
4
5
6
7
8
9
0
8
1
5
2
6
3
8
2
5
1
9
3
6
2
8
1
5
3
6
2
q2
P1
P2
q1
b
c
1
b
l1
l2
l3
P2
q2
q1
P1
l2
l3
c
2
b
l1
P1
P2
3
l1
b
b
q2
l2
Рис. 50. Расчетные схемы к задаче № 6
56
c
P1
q2
q1
4
b
l1
P1
q1
5
l2
q2
5
P2
b
b
l1
c
l2
l3
P1
q2
P2
q1
6
b
l1
P2
l2
b
l3
q2
P1
7
l2
c
b
l1
q2
q1
P2
8
b
l1
c
l2
c
q2
P1
P2
9
b
l1
l2
c
P1
q2
q1
0
c
l1
l2
Рис. 50. Окончание
57
l3
P2
b
c
Методические указания к решению задачи № 6
Для расчета неразрезанной балки используем уравнение трех моментов,
вывод которого рассматривается в учебниках.
⎛ω a ω b ⎞
M n −1l n + 2M n (l n + l n +1 ) + M n +1l n +1 = −6⎜⎜ n n + n +1 n +1 ⎟⎟,
(17)
l n +1 ⎠
⎝ ln
где Mn-1, Mn, Mn+1 – опорные моменты, ln, ln+1 – длины пролетов, ωn, ωn+1 – площади эпюр изгибающих моментов, an, bn+1 – абсциссы центров тяжести эпюр
моментов как геометрических фигур (рис. 51).
Mn
Mn-1
Mn+1
ln
ln+1
ωn
an
ωn+1
bn+1
Рис. 51. Фрагмент основной системы многопролетной балки
В табл. 10 приводятся сведения о геометрических характеристиках фигур
(площадь, абсциссы центров тяжести), форму которых могут иметь эпюры изгибающих моментов в однопролетных балках.
Таблица 10
Геометрические характеристики плоских фигур
Схема балки и вид эпюры изгибающих моментов
1
m1
h
F
Z1
Z2
2
3
4
5
h1 = m1
h2 = m2
(h1 + h2 )
l
2
h1 + 2h2
l
3(h1 + h2 )
h2 + 2h1
l
3(h1 + h2 )
P ⋅a ⋅b
l
l ⋅h
2
a+l
3
b+l
3
m2
l
h2
h1
Z1
a
Z2
P
b
h
l
Z1
Z2
58
Продолжение табл. 10
1
2
3
4
5
ql 2
8
2
l ⋅h
3
l
2
l
2
m
hl
2
1
l
3
2
l
3
q
h
l
Z1
Z2
m
l
h
Z1
Z2
Пример решения задачи № 6
q1
P
1
0
l1
a
q2
Расчетная схема балки представлена на рис. 52.
Р = 4 кН, q1 = 2 кН/м,
q2 = 4 кН/м, l1 = 8 м, l2 = 6 м,
а = 2 м, с = 2 м.
2
l2
c
Рис. 52. Расчетная схема балки
Решение. Балка является дважды статически неопределимой. Из заданной
системы переходим в основную путем врезания шарниров в заделку и в промежуточную опору (рис. 53). Жесткую заделку заменим пролетом l0 = 0 (J = ∞).
Консоль заменяем моментом на опоре 2, величина которого M 3 = − qc 2 / 2 = −8
кН⋅м. Построим эпюры изгибающих моментов от заданных нагрузок для каждого пролета, рассматривая их как простые двухопорные балки. Отмечаем абсциссы центров тяжести эпюр (а1 = 4, b2 = 10/6).
Следует составить два уравнения моментов.
Для составления уравнения 3-х моментов для опоры 0 имеем:
2
256
Мn-1 = 0, ωn = 0, ln = l0 = 0, an = 0, Mn = M1, ω n +1 = ω1 = ⋅ 16 ⋅ 8 =
,
3
3
bn+1 = 4 м, ln+1 = l1 = 8 м, Mn+1 = M2.
Согласно (17) уравнение трех моментов для опоры 0 примет вид
256 4
2 M 1 (0 + 8) + M 2 ⋅ 8 = −6 ⋅
⋅ или 16 M 1 + 8M 2 = −256 .
3 8
59
Для составления уравнения 3-х моментов для опоры 1 имеем: Мn-1 = М1,
1 16
256
ω n = ω1 =
, ln = 8 м, an = 4 м, Mn = M2, ω n +1 = ω 2 = ⋅ ⋅ 6 = 16 , bn+1 = 10/3
2 3
3
м, ln+1 = l2 = 6 м, Mn+1 = M3 = − 8.
M1
M2
0
M3
2
1
l0
l1
a1
l2
ω1
16
ω2
16
3
b1
a2
b2
Рис. 53. Основная схема неразрезной балки
Согласно (17) уравнение трех моментов для опоры 1 примет вид
10 ⎞
⎛ 256 4
⋅ + 16 ⋅
M 1 ⋅ 8 + 2 M 2 (6 + 8) − 8 ⋅ 6 = −6⎜
⎟ или 8M 1 + 28M 2 = −261,3 .
3⋅6 ⎠
⎝ 3 8
Решаем систему из двух уравнений и определяем опорные моменты.
16M 1 + 8M 2 = −256,
8M 1 + 28M 2 = −261,3.
М1 = − 13,2 кН⋅м, М2 = − 5,6 кН⋅м.
На основании полученных результатов строим огибающую опорных моментов (рис. 54, а). Отрицательные значения М1 и М2 означают, что моменты
деформируют балку с растяжением верхних волокон, поэтому огибающая моментов отложена выше базовой линии.
Производим суммирование ординат эпюры опорных моментов и ординат
эпюры, построенной для каждого пролета отдельно (рис. 53 и 54, б). Результатом сложения эпюр будет окончательная эпюра изгибающих моментов для неразрезной балки (рис. 54, в).
Определяем величины поперечных сил для каждого участка балки.
M пр − М л q2 c 0 + 8 4 ⋅ 2
QIпр =
−
=
−
= 0.
c
2
2
2
M пр − М л q2 c 0 + 8 4 ⋅ 2
QIл =
+
=
+
= 8 кН.
c
2
2
2
60
QII =
QIII =
пр
QIV
=
л
QIV
=
M пр − М л
l2 − a
M пр − М л
a
M пр − М л
l1
− 8 − ( −1,07)
= 1,73 кН.
4
=
− 1,07 − (−5,5)
= 2,27 кН.
2
−
M пр − М л
l1
=
q1l1 − 5,6 − (−13,2) 2 ⋅ 8
=
−
= −7,05 кН.
2
8
2
+
q1l1 − 5,6 − (−13,2) 2 ⋅ 8
=
+
= 8,95 кН.
2
8
2
q1 =2 êÍ/ì
R0
0
à) 13,2
2
l 2 =6
c=2
5,6
9,4
q2 =4 êÍ/ì
R2
1
a=2
l 1 =8 ì
P=4 êÍ
R1
8
6,4
á)
16/3
l1 /2
16
â) 13,2
III
IV
5,6
II
I
8
Ìîê
1,07
6,6
z0 =4,475
ã) 8,95
8
2,27
Q
1,73
7,05
Рис. 54. Построение эпюр внутренних усилий в неразрезной балке
Реакции внешних связей составят:
R0 = 8,95 кН, R1 = 7,05 + 2,27 = 9,32 кН, R2 = 1,73 + 8 = 9,73 кН.
Проводим статическую проверку:
∑ y = R0 − q1l1 + R1 − P + R2 − q2 c = 0.
8,95 – 2⋅8 + 9,32 – 4 + 9,73 – 4⋅2 = 0.
61
Кроме статической проверки необходимо провести кинематическую проверку – перемещения основной и заданной системы от совместного действия
неизвестных и нагрузки по направлению любого неизвестного должны быть
M ок M
dx = 0.
равны нулю. Это условие имеет запись ∑ ∫
EJ
Произведем перемножение окончательной эпюры моментов (Мок) с суммарной единичной эпюрой ( M ) (рис. 55), используя таблицу 8 выражений интеграла Мора ∫ M i M p dx для различных сочетаний эпюр. Предварительно произведем расслоение эпюры моментов на IV участке.
M ⋅M
2 1⋅ 8 ⋅16 1 (13,2 + 5,6) ⋅ 8 1 ⎡ 5,6(1⋅ 2 + 2 / 3) + 1,07(2 ⋅ 2 / 3 + 1) ⎤
− ⎢
∑ ∫ окEJ dx = 3 ⋅ EJ − 2 ⋅
⎥⎦ ⋅ 2 −
6⎣
EJ
EJ
1 (2 / 3) ⋅ 4 ⋅ (2 ⋅1,07 + 8) 85,333 85,517
0,184
− ⋅
=
−
=−
.
EJ
EJ
EJ
EJ
6
Относительная погрешность ε =
A− B
min{A, B}
8
⋅100% =
2
13,2
5,6
0,184
⋅100 = 0,22%.
85,333
4
8
1,07
Ìîê
6,6
Ðàññëîåíèå ýïþðû
íà IV ó÷àñòêå
16
13,2
5,6
1
2/3
M
Рис. 55. Расчетная схема моментов для кинематической проверки балки
ЗАДАЧА № 7. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ РАМЫ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ (ДЕФОРМАЦИЙ)
Задание. Для рамы с выбранными по шифру из табл. 11 размерами и нагрузкой по расчетной схеме (рис. 56) требуется:
1) определить число независимых линейных и угловых перемещений.
2) выбрать основную систему метода перемещений.
62
3)
4)
2)
раскрыть статическую неопределимость.
построить эпюры М, Q, N.
выполнить статическую и кинематическую проверку рамы.
Жесткости стоек и ригелей рамы берутся одинаковыми.
Таблица 11
Числовые данные к задаче № 7
Первая цифра шифра
l, м
Вторая цифра шифра
h, м
Р1, кН
Р2, кН
Р3, кН
Третья цифра шифра
(номер схемы)
q, кН/м
1
4
1
3
4
0
0
2
5
2
4
0
4
0
3
6
3
5
0
0
6
4
3
4
9
5
0
0
5
7
5
6
0
5
0
6
8
6
7
0
0
5
7
9
7
8
6
0
0
8
10
8
2
0
6
0
9
12
9
12
0
0
4
0
2
0
10
7
0
0
1
2
3
4
5
6
7
8
9
0
2
4
6
4
2
6
4
2
4
6
1
2
l/2
l/2
l/2 l/2
P3
P3
q
h/2
h/2
h
q
P2
P1
P2
h
P1
l
l
l
3
l
l
4
P2
l
h
P1
l/2
P3
l/2
l
l
Рис. 56. Расчетные схемы к задаче № 7
63
h
h/4
P3
P2
l/2
q
h/2
q
h/2
l/2
h/2
P1
l
5
6
l/2
l/2
P1
P2
P1
P2
l/2
l/2
P3
h
h
P3
h/2
q
l
h/2
q
l
l
7
l
l
8
l/2
l/2
P2
P2
q
h/2
h/2
h
P3
h/2
q
P3
l/2
P1
h/2
P1
h
l/2
l
l
l
9
l
0
l/2
P1
P2
P3
P3
h/2
h
h/2
l/2
h/2
l/2
P1
l
l/2
q
q
l
l
Рис. 56. Окончание
64
P2
l
Методические указания к решению задачи № 7
Метод, в котором за основные неизвестные принимаются угловые и линейные перемещения узлов системы и который позволяет их найти, называется
методом перемещений.
Общее число неизвестных метода перемещений называют степенью кинематической неопределимости, она определяется как сумма неизвестных углов
поворота nу и неизвестных независимых линейных перемещений nл:
n = nу + nл .
(18)
nу равно числу жестких узлов (узел, в котором жестко соединено не менее
двух стержней), nл определяется по шарнирной схеме, которую получают путем
введения шарниров в жесткие узлы и жесткие заделки по формуле:
n л = 2У − С − С 0 ,
(19)
где У – число шарнирных узлов рамы, включая опорные, С – число стержней
рамы, С0 – число опорных стержней.
Например, на рис. 57, а представлена статически неопределимая рама.
Число жестких узлов nу = 2 (узлы С и D). Шарнирная схема рамы показана на
рис. 57, б. Число независимых линейных перемещений nл = 2 ⋅ 6 − 5 − 5 = 2.
Таким образом, степень кинематической неопределимости рамы составит
n = n у + n л = 2 + 2 = 4.
Для того, чтобы предотвратить угловые перемещения рамы, в узлы С и D
вводим дополнительные жесткие заделки, а для предотвращения линейных перемещений вводим дополнительные опорные стержни (рис. 57, в). Таким образом получаем основную систему метода перемещений.
В дополнительных закреплениях возникают реакции (Z1, Z2, Z3, Z4), которые и являются основными неизвестными метода перемещений.
а)
в)
б)
B
C
D
B
C
D
Z1
Z3
B
A
F
E
A
F
D
C
E
A
Рис. 57. Статически неопределимая рама
65
Z2
F
E
Z4
Если заданная система n раз кинематически неопределима, то после наложения на нее n дополнительных связей, устраняющих возможные перемещения
ее узлов и приложения к ним неизвестных перемещений Z1, Z2, Z3,…, Zn, система канонических уравнений метода перемещений для определения неизвестных
будет представлена в виде:
r11 Z 1 + r12 Z 2 + ... + r1n Z n + R1P = 0;
r21 Z 1 + r22 Z 2 + ... + r2 n Z n + R2 P = 0;
(20)
.....................................................
rn1 Z 1 + rn 2 Z 2 + ... + rnn Z n + RnP = 0
где rii (r11, r22, …, rnn) – реакция, возникающая в дополнительной связи i, где
имеется перемещение Zi, от смещения этой же связи на единицу, rik (r12, r21, …,
rn2) – реакция, возникающая в дополнительной связи i, где имеется перемещение Zi, от смещения связи k на единицу, RiP – реакция, возникающая в связи i от
действия на основную систему нагрузки.
Основная система метода перемещений представляет собой совокупность
независимых однопролетных статически неопределимых балок. Эти балки уже
заранее рассчитаны на все виды воздействия (кинематическое, силовое и температурное).
Опорные реакции и моменты в статически неопределимых балках, используемых в контрольной работе для расчета рам методом перемещений приведены в табл. 12 (только от силового и кинематического воздействия).
Таблица 12
Реакции и моменты в статически неопределимых балках
для расчета рам методом перемещений
Номер
балки
1
ϕA =
1
Схема
Эпюра моментов и опорные реакции
2
3
RA =RB = 3EJ2
l
1
A
B
RA
B
A
l
∆=1
A
MA
MA = 3EJ
l
RB
B
RA = RB = 3EJ3
l
MA
2
A
l
RA
66
MA = 3EJ2
l
RB
B
1
Продолжение табл. 12
3
2
2
MA =Plv(1-v )/2
P
A
3
B
ul
MA
vl
P
4
MA
2
RA =Pv(3-v )/2
RB =Pu (3-u)/2
MA = 3Pl RA = 11P RB = 5P RB
RA
16
16
16
B
A
l
q
2
MA = ql
8
ql
8
A
l
RB = 3ql
8
RA = 5ql
8
ϕA =1
2
B
B
A
5Pl
32
MA
5
RB
RA =RB = 6EJ2
MA
l
A
6
A
B
l
∆=1
7
vl
2
B
A
RB
RA
l
l/2
vuPl
A
B
MB = 2EJ
l
4EJ
RA MA = l
RA =RB = 12EJ
3
l
MA
A
B
6EJ
RA MA =MB = l 2
l
l/2
P
8
MA
B
A
A
RA
l
67
B
MB
B
Pl
8
RB
MB
MA =MB = Pl
8
RA =RB = P
2
MB
RB
Окончание табл. 12
vuPl
2
P
A
9
MA =uv Pl
2
MB =u vPl
B
ul
vl
RA
l
2
RA =v (1+2u)P
q
2
10
A
RA =RB = ql
2
MA =MB = ql
12
MA
MB
B
A
B
RB
vl
2
RB =u (1+2v)P
2
RA
l
ql
24
RB
Порядок расчета рам методом перемещений аналогичен порядку расчета
стержневых систем методом сил. При проведении кинематической проверки
необходимо производить перемножение окончательной эпюры изгибающих
моментов с единичной эпюрой, построенной в любой основной системе метода
сил.
Пример решения задачи № 7. Расчет рамы со смещаемыми узлами
Расчетная схема рамы представлена на рис. 58.
Число жестких узлов nу = 1 (узел С), число независимых линейных перемещений определим по шарнирной схеме (рис. 59).
nл = 2У − С − С0 = 2 ⋅ 6 − 5 − 6 = 1.
Степень кинематической неопределимости
n = n у + n л = 1 + 1 = 2.
E
C
h/2
E
q= 3 êÍ/ì
Ð2 =6 êÍ
B
C
B
l/2
D
h/2
h=6 ì
Ð1 =8 êÍ
À
D
À
F
l= 8 ì
F
l= 8 ì
Рис. 58. Расчетная схема рамы
Рис. 59. Шарнирная схема рамы
68
Заданная рама два раза кинематически неопределима. Образуем основную
систему, введя в узел С заделку, препятствующую возможному угловому смещению, в дополнительной связи возникает реакция, которую обозначим через
Z1. Вторая дополнительная связь в виде горизонтального опорного стержня будет препятствовать линейному смещению узлов рамы (рис. 60). Реакция в дополнительном опорном стержне Z2.
E
q= 3 êÍ/ì
Z2
Z1
Ð2 =6 êÍ
B
Канонические уравнения
метода перемещений запишутся
в виде
D
C
r11 Z 1 + r12 Z 2 + R1P = 0;
Ð1 =8 êÍ
r21 Z 1 + r22 Z 2 + R2 P = 0.
ÎÑ
À
F
Рис. 60. Основная система метода перемещений
Для определения коэффициентов при неизвестных строим единичные эпюры. Первую эпюру получаем, придав единичное угловое перемещение в первую
связь узел С (рис. 61). Изображаем деформированную схему рамы, на стержни
которой со стороны растянутых волокон накладываем эпюры моментов балок
из табл. 12 (схемы № 1 и 6). Определяем значения опорных моментов и реакций
по формулам табл. 12.
Коэффициент r11 определяем из рассмотрения условия равенству нулю
29
3
2
3
EJ .
моментов в узле С: r11 − EJ − EJ − EJ − EJ = 0, r11 =
12
8
3
8
Коэффициент r21 определяем из условия равенства нулю горизонтальных
1
1
1
сил: r21 + EJ − EJ = 0, r21 = − EJ .
3
6
6
3 EJ E
8
EJ
B
2 EJ
3
3
8 EJ
M1
A
F
D
3
8 EJ
EJ
3
C 8 EJ
1
r21
r11
1 EJ
3
r21
B
2 EJ
3
1
3 EJ
D
1
6 EJ
Рис. 61. Схема определения коэффициентов r11 и r21
69
Вторую единичную эпюру получим, если придадим единичное линейное
перемещение во второй связи (рис. 62). Так же изображаем деформированную
схему рамы, на стержни которой со стороны растянутых волокон накладываем
эпюры из табл. 12 (балки № 2 и 7). Значения опорных моментов и реакций определяем по формулам табл. 12.
Коэффициент r22 определяем, рассматривая условие равенства нулю гори3
3
12
29
EJ .
зонтальных сил: r22 − 3 EJ − 3 EJ − 3 EJ = 0, r22 =
6
3
6
72
Коэффициент r12 определим, рассматривая условие равенства нулю момен1
1
1
тов в узле С: r12 + EJ − EJ = 0, r12 = − EJ .
3
6
6
E
1
r22
r12
1
EJ 3
B
D
1
EJ 6
A
C
1
6 EJ
M2
3 EJ
3
3
B
r22
F
1
EJ 12
1
3 EJ
1
6 EJ
D
C 12
3 EJ
6
3
3 EJ
6
Рис. 62. Схема определения коэффициентов r12 и r22
Для определения свободных членов канонического уравнения необходимо
построить в основной системе эпюры от заданных внешних сил (рис. 63).
Из табл. 12 переносим эпюры моментов от силового воздействия (балки №
4 и 5), определяем численные значения опорных моментов и реакций.
E
24
R2P
9
B
7,5
A
2
ql =24
8
7,5
R1P
12
9
R1P
D
R2P
MP
B
F
5P1 =2,5
16
D
C
Рис. 63. Схема определения свободных членов R1P и R2Р
70
C
3Pl =9
16
Рассматриваем равновесие узла С, определяем R1Р:
∑ М C = 0, R1P + 9 − 24 = 0, R1P = 15.
Рассматриваем условие равновесие горизонтальных сил:
∑ x = 0, − 2,5 + R2 P = 0, R2 P = 2,5.
Найденные значения коэффициентов подставляем в каноническое уравнение метода перемещений, решая систему уравнений определяем неизвестные Z1
и Z2.
29
1
EJZ1 − EJZ 2 + 15 = 0,
12
6
1
29
− EJZ1 +
EJZ 2 + 2,5 = 0.
6
72
7,65
21
, Z2 = −
.
EJ
EJ
Z1 = −
Строим «исправленные» эпюры, для этого ординаты единичных эпюр умножаем на найденные значения Z1 и Z2 (рис. 64, а и б).
Для получения окончательной эпюры изгибающих моментов необходимо
произвести сложение «исправленных» эпюр и грузовой эпюры, построенной в
основной системе метода перемещений M ок = M 1Z1 + M 2 Z 2 + M P . Окончательная эпюра моментов в заданной системе представлена на рис. 64, в.
а)
б)
E
E
B
2,87
7,65
D
B
6,97
3,49
5,1
D
2,87
M 1 Z1
A
M 2 Z2
A
F
2,55
F
1,74
3,49
в)
E
21,13
11,87
IV
B
13,44
VI
0,68
A
10,74
C
8,59
III
6,63
VII
I
II
V
21,13
M îê
F
6,04
D
6,065
0,68
11,87
C
8,59
Рис. 64. Схема построения окончательной эпюры изгибающих моментов в заданной системе
71
Условие равенства нулю моментов в узлах рамы является необходимым
условием правильности построения окончательной эпюры моментов. В нашем
случае ∑ М C = 0,68 + 11,87 + 8,59 − 21,13 = − 0,01. Такое отклонение допустимо,
т. к. относительная погрешность составляет 0,02 %.
Произведем кинематическую проверку. Для этого построим единичную
эпюру изгибающих моментов в основной системе метода сил и перемножим ее
с окончательной эпюрой моментов в заданной системе с использованием таблицы выражений интеграла Мора для различных сочетаний эпюр (табл. 8).
Статическая неопределимость заданной системы:
n = 2 Ш + C 0 − 3D = 2 + 8 − 3 ⋅ 2 = 4. Следовательно заданная рама имеет
4 «лишних» связи.
Для построения суммарной единичной эпюры удаляем «лишние» связи, их
действие заменяем единичными усилиями и получаем основную систему метода сил (рис. 65).
1
E
4
B
0,5
A
1
1
HA =1/6
3
C
15
D
4
8
1
MS
1
F
1
HF =5/6
RF =2,875
Рис. 65. Суммарная единичная эпюра в основной системе метода сил
M S ⋅ M ок
1
[10,74(−2 ⋅ 1 − 0,5) − 6,63(−0,5 ⋅ 2 − 1)] ⋅ 3 + 1 ⋅ 0,5 ⋅ 6,63 ⋅ 3 +
=
3EJ
6 EJ
EJ
1
1
1
1
[8,59(−4 ⋅ 2 + 1) − 6,04(2 ⋅ 1 − 4)] ⋅ 6 +
⋅ 21,13 ⋅ 15 ⋅ 8 − ⋅ 24 ⋅ 15 ⋅ 8 − ⋅ 3 ⋅ 0,68 ⋅ 3 +
3EJ
3
3
6 EJ
1
[11,87(−8 ⋅ 2 − 4) − 6,065(−4 ⋅ 2 − 8)] ⋅ 4 + 1 6,065 ⋅ 4 ⋅ 4 =
+
6 EJ
3EJ
993,615 995,662 2,047
=−
+
=
.
EJ
EJ
EJ
∑∫
72
M S ⋅ M ок
грузовую эпюру изEJ
гибающих моментов на участке ВС предварительно расслоили на треугольную
эпюру и параболу (рис. 66).
При перемножении эпюр по формуле
21,13
B
C
21,13
13,44
2
(ql )/8=24
8ì
Рис. 66. Схема расслоения эпюры
∑∫
Относительная погрешность составила:
A− B
2,047
ε=
⋅100% =
⋅100% ≈ 0,2% ,
min{A, B}
993,615
что допускается.
По окончательной эпюре изгибающих
моментов строим эпюру поперечных сил по
участкам (рис. 67).
0 − 6,065
QI =
= −1,52 кН.
4
6,065 − (−11,87)
QII =
= 4,48 кН.
4
6,04 − (−8,59)
0 − (−0,68)
= 2,44 кН. QIV =
= 0,23 кН.
6
3
− 21,13 − 0 3 ⋅ 8
− 21,13 − 0 3 ⋅ 8
QVпр =
−
= −14,64 кН. QVлев =
+
= 9,36 кН.
8
2
8
2
0 − 6,63
6,63 − (−10,74)
QVI =
= −2,21 кН. QVI =
= 5,79 кН.
3
3
QIII =
x0
0,23
9,36
E
4,48
IV
I
V
B
C
VI
II
1,52
2,21
5,79
14,64
III
VII
A
D
Q
F
2,44
Рис. 67. Эпюра поперечных сил
Поперечная сила обращается в нуль на участке рамы ВС при
73
9,36 9,36
=
= 3,12 м.
q
3
В этом случае экстремальное значение изгибающего момента составит:
3 ⋅ 3,12 2
M max = 9,36 ⋅ 3,12 −
= 14,6 кН ⋅ м.
2
По эпюре поперечных сил построим эпюру продольных сил, используя метод вырезания узлов (рис. 68).
x0 =
Q IV =0,23
Q V =9,36
N V =2,21
B
N V =2,21
Q V =14,64
Q VI =2,21
N VI =9,36
C
Q II =4,48
Q III =2,44
N III =19,12
Рис. 68. Схема вырезания узлов для определения продольных сил
E
C
D
B
2,21
N
9,36
A
∑ y = 0.
19,12
F
R A + RF + RD − ql − P2 = 0.
9,36 + 19,12 + 1,52 − 24 − 6 = 0.
Рис. 69. Эпюра продольных сил
∑ x = 0.
HE =0,23
E
RD =1,52
P2 =6
C
D
B
ql=24
P1 =8
G
HF =2,44
HA =5,79 A
RA =9,36
mA =10,74
Эпюра продольных сил представлена на рис. 69.
Приложим к раме все внешние нагрузки в том числе и реакции внешних связей (рис. 70).
Произведем
статическую
проверку.
RF =19,12
− H A + P1 + H E − F = 0 .
− 5,79 + 8 + 0,23 − 2,44 = 0.
Проверки по силам выполняются.
∑ mG = 0.
m A + mF − H A ⋅ 3 − R A ⋅ 4 − H F ⋅ 3 +
F
+ RF ⋅ 4 − H E ⋅ 6 − P2 ⋅ 8 + RD ⋅12 = 0
mF =6,04
Рис. 70. Схема сил, приложенных к раме
74
10,74 + 6,04 − 5,79 ⋅ 3 − 9,36 ⋅ 4 − 2,44 ⋅ 3 + 19,12 ⋅ 4 − 0,23 ⋅ 6 − 6 ⋅ 8 + 1,52 ⋅ 12 =
= 111,5 − 111,51 = −0,01.
Относительная погрешность составляет примерно 0,01 %, что допускается.
Пример расчета рамы без линейного смещения узлов.
Схема рамы представлена на рис. 71. Число угловых перемещений равно
числу жестких узлов nу = 2. Число независимых линейным перемещений определяем по шарнирной схеме (рис. 72).
n л = 2Y − C − C 0 = 2 ⋅ 6 − 5 − 7 = 0. Таким образом, степень кинематической
неопределимости рамы составляет 2. Для предотвращения возможных угловых
перемещений в жесткие узлы (В и С) устанавливаем жесткие заделки и получаем основную систему метода перемещений (рис. 73).
E
E
P2 =6 êÍ
B
h/2
q=3 êÍ/ì
h/2
h=6 ì
A
D
B
C
P1 =8 êÍ
D
C
l/2
ÇÑ
F
A
l=8 ì
F
l=8 ì
Рис. 72. Шарнирная схема рамы
Рис. 71. Заданная расчетная схема рамы
E
q=3 êÍ/ì
Z1
Z2
B
P2 =6 êÍ
D
C
P1 =8 êÍ
ÎÑ
A
В дополнительных связях возникают реакции Z1 и Z2, которые
определим из канонических уравнений метода перемещений:
r11 Z 1 + r12 Z 2 + R1P = 0,
F
r21 Z 1 + r22 Z 2 + R2 P = 0.
Рис. 73. Основная схема метода перемещений
Для определения коэффициентов при неизвестных необходимо построить
единичные эпюры, которые получаем путем последовательного введения единичного углового перемещения в наложенные связи.
75
Первая единичная эпюра (рис. 74) получена путем введения единичного
углового смещения в первой связи. На деформированную схему рамы накладываем эпюры из табл. 12 (балка № 6).
Условие равновесия узла В:
EJ 2 EJ
7 EJ
∑ M B = 0, r11 − 2 − 3 = 0, r11 = 6 .
Условие равновесия узла С:
EJ
EJ
∑ M C = 0, r21 − 4 = 0, r21 = 4 .
E
2EJ
l
B
4EJ
h
D
C
A
r21
r11
1
4EJ
l
2EJ
h
EJ
2
B
M1
F
EJ
4
2EJ
3
C
Рис. 74. Схема определения коэффициентов r11 и r21
Придаем единичное угловое перемещение во второй связи, строим вторую единичную эпюрe, используя схемы балок из табл. 12 (рис. 75).
E
4EJ
l
3EJ
h/2
B
D
4EJ
h
3EJ
l
M2
A
F
EJ
1
2EJ
l
r22
C
r12
B
2EJ
h
EJ
4
EJ
2
2EJ
3
Рис. 75. Схема определения коэффициентов r22 и r12
Равновесие узла В:
EJ
EJ
∑ M B = 0, r12 − 4 = 0, r12 = 4 .
76
C
3EJ
8
Равновесие узла С:
3 EJ 2 EJ EJ
61EJ
−
−
= 0, r22 =
.
8
3
2
24
В основной системе строим эпюры изгибающих моментов от заданной
внешней нагрузки и получаем грузовую эпюру (рис. 76). Рассматривая равновесие узлов определяем свободные члены канонических уравнений.
Равновесие узла В:
∑ M B = 0, R1P + 16 − 6 = 0, R1P = −10.
∑M
C
= 0, r22 − EJ −
Равновесие узла С:
∑ M C = 0, R2 P + 9 − 16 = 0, R2 P = 7.
2
2
ql
12
ql
12
P1 h
8
E
3P2 l
16
B
D
C
5P2 l
32
2
ql
24
P1 h
8
P1 h
8
A
MP
R2P
R1P
F
B
16
16
C 9
6
Рис. 76. Схема определения свободных членов R1P и R2Р
Подставляем найденные коэффициенты и свободные члены в каноническое уравнение метода перемещений и определяем неизвестные Z1 и Z2.
7 EJ
EJ
Z1 +
Z 2 − 10 = 0,
6
4
EJ
61EJ
Z1 +
Z 2 + 7 = 0.
4
24
Z1 =
9,36
3,67
, Z2 = −
.
EJ
EJ
Строим «исправленные» эпюры, умножив ординаты единичных эпюр на
соответствующие значения Z1 и Z2 (рис. 77).
77
E
E
6,24
2,34
B
C
1,17
1,38
0,92
D
A
D
B
C
0,46
4,68
1,56
0,62
3,67
2,45
1,84
M1 Z1
3,12
M2 Z2
F
A
1,22
F
Рис. 77. «Исправленные» эпюры моментов
Производим суммирование «исправленных» эпюр и грузовой эпюры моментов M 1 Z1 + M 2 Z 2 + M P = M ок .
Получаем окончательную эпюру изгибающих моментов в заданной системе (рис. 78). Необходимое условие – равенство нулю моментов сил в узлах
рамы выполнено.
16,5
12,24
12,24
E
10,38
V
B
VI
6,37
II
3,67 C
2,45
6,81
Mîê
III
4,44
VII
2,88
A
1,22
D
I
B
F
12,24
3,67
12,24
16,5
10,38
C
2,45
Рис. 78. Окончательная эпюра изгибающих моментов в заданной системе
Произведем кинематическую проверку. Для этого построим единичную
эпюру изгибающих моментов в основной системе метода сил и перемножим ее
с окончательной эпюрой моментов в заданной системе с использованием таблицы выражений интеграла Мора для различных сочетаний эпюр (табл. 8).
Статическая неопределимость заданной системы:
n = 2 Ш + C0 − 3D = 2 ⋅ 0 + 9 − 3 ⋅1 = 6. Следовательно заданная рама имеет 6
«лишних» связей.
Для построения суммарной единичной эпюры удаляем «лишние» связи, их
действие заменяем единичными усилиями и получаем основную систему метода сил (рис. 79).
78
E
B
5
16
D
F
1
1
4
8
16
19
22
1
3
C
16
A
1
MS
1
1
1
Рис. 79. Суммарная единичная эпюра в основной системе метода сил
M S ⋅ M ок
1
[4,44(2 ⋅19 + 22) − 2,88(2 ⋅ 22 + 19)]⋅ 3 +
=
6 EJ
EJ
1
[4,44(2 ⋅19 + 16) − 12,24(2 ⋅16 + 19)]⋅ 3 − (12,24 + 16,5) ⋅16 ⋅ 8 + 2 ⋅ 24 ⋅16 ⋅ 8 −
+
6 EJ
2 EJ
3EJ
1
1
[2,45(−2 ⋅ 5 + 1) − 1,22(2 ⋅1 − 5)]⋅ 6 +
−
⋅ 3 ⋅ 3,67 ⋅ 3 +
3EJ
6 EJ
1
[10,38(−2 ⋅ 8 − 4) − 6,8(−2 ⋅ 4 − 8)]⋅ 4 + 1 ⋅ 6,81⋅ 4 ⋅ 4 = 2126,8 − 2126,75 = 0,05 .
+
6 EJ
3EJ
EJ
EJ
EJ
∑∫
M S ⋅ M ок
грузовую эпюру изEJ
гибающих моментов на участке ВС предварительно расслоили на трапецию и
параболу (рис. 80).
16,5
Относительная погрешность составила:
12,24
При перемножении эпюр по формуле
ε=
C
B
16,5
12,24
2
(ql )/8=24
8ì
∑∫
A− B
⋅100% =
0,05
⋅100% ≈ 0,002% ,
2126,75
min{A, B}
что допускается.
По окончательной эпюре изгибающих
моментов строим эпюру поперечных сил по
участкам (рис. 81).
0 − 6,81
= −1,7 кН.
4
6,81 − (−10,38)
QII =
= 4,3 кН.
4
QI =
Рис. 80. Схема расслоения эпюры
79
1,22 − (−2,45)
0 − (−3,67)
= 0,61 кН. .
QIV =
= 1,22 кН.
6
3
− 16,5 − (−12,24) 3 ⋅ 8
QVпр =
−
= −12,53 кН.
8
2
− 16,5 − (−12,24) 3 ⋅ 8
QVлев =
+
= 11,47 кН.
8
2
4,44 − (−2,88)
− 12,24 − 4,44
QVI =
= −5,56 кН. QVI =
= 2,44 кН.
3
3
На участке ВС поперечная сила обращается в нуль, для сечения, расположенного на расстоянии x0 = 11,47 / q = 11,47 / 3 = 3,8 м экстремальное значение
изгибающего момента составит:
M max = 11,47 ⋅ 3,8 − q ⋅ 3,82 / 2 − 12,24 = 9,69 кН ⋅ м.
QIII =
x0
1,22
E
4,3
IV
11,47
B
V
I
C
VI
5,56
II
12,53
1,7
Q
III
2,44
D
VII
A
0,61
F
Рис. 81. Эпюра поперечных сил
Методом вырезания узлов (рис. 82) и уравновешивая силы, определим
значения продольных сил. Эпюра продольных сил представлена на рис. 83.
QV =11,47
E
NV =5,56
B
NVI =11,47
5,56
QIV =1,22
QV =12,53
NV =5,56
NCD =6,17
C
QIII =0,61
D
C
B
QVI =5,56
6,17
N
11,47
A
F
16,83
QII =4,3
Рис. 83. Эпюра продольных сил
NIII =16,83
Рис. 82. Схема вырезания узлов рамы
80
E
HE =1,22
RD =1,7
P2 =6
HD =6,17
C
B
D
ql=26
∑ y = 0.
P1 =8
R A + R F + R D − P2 − ql =
G
A
11,47 + 16,83 + 1,7 − 6 − 24 = 0.
∑ x = 0.
F
HA =2,44
RA =11,47
mA =2,88
HF =0,61
RF =16,83
mF =1,22
− H A − H F + P1 + H E − H D =
Рис. 84. Схема рамы с внешними силами
∑M
Прикладываем к раме все
внешние силы (рис. 84) и проводим статическую проверку.
− 2,44 − 0,61 + 8 + 1,22 − 6,17 = 0.
= 0.
H E ⋅ 6 + P2 ⋅ 8 − RD ⋅12 − H D ⋅ 3 − mF − RF ⋅ 4 + R A ⋅ 4 + H F ⋅ 3 + H A ⋅ 3 − m A =
= 1,22 ⋅ 6 + 6 ⋅ 8 − 1,7 ⋅12 − 6,17 ⋅ 3 − 1,22 − 16,83 ⋅ 4 + 11,47 ⋅ 4 + 0,61 ⋅ 3 + 2,44 ⋅ 3 − 2,88 =
G
= 110,35 − 110,33 = 0,02 кН ⋅ м.
Относительная погрешность при проверке выполнимости условия равенству нулю моментов сил относительно произвольной точки G составляет примерно 0,02 %.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Анохин, Н. Н. Строительная механика в примерах и задачах [Текст] : учеб. пособие
для студ. вузов, обучающихся по строит. спец. / Н. Н. Анохин. – 2-е изд., доп. и перераб.
– М. : АСВ, 2007. Ч. 1. Статически определимые системы. – 335 с.
2. Анохин, Н. Н. Строительная механика в примерах и задачах [Текст] : учеб. пособие
для студ. вузов, обучающихся по строит. спец. / Н. Н. Анохин. – 2-е изд., доп. и перераб.
– М. : АСВ, 2007. Ч. 2. Статически неопределимые системы. – 464 с.
3. Дарков, А. В. Строительная механика [Текст] : учебник / А. В. Дарков, Н. Н. Шапошников. – 11-е изд., стер. – СПб. ; М. ; Краснодар : Лань, 2008. – 656 с.
4. Саргсян, А. Е. Строительная механика. Основы теории с примерами расчетов
[Текст] : учебник для вузов / А. Е. Саргсян. – СПб., 2001. – 320 с.
5. Саргсян, А. Е. Строительная механика. Основы теории с примерами расчетов
[Текст] : учебник для вузов / А. Е. Саргсян. – М.: Высш. шк., 2000. – 431 с.
81