Решение волнового уравнения для боковины пневматической
advertisement

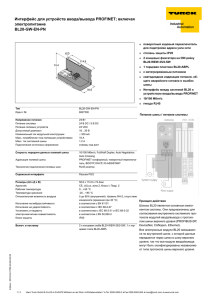
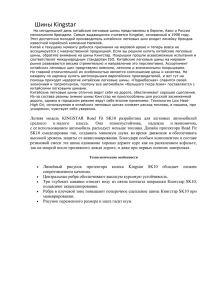
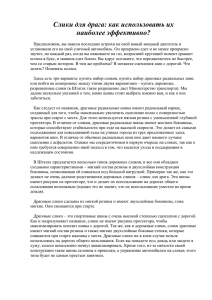
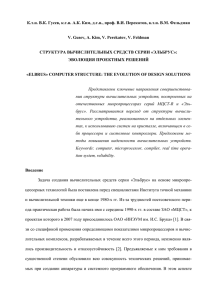
РЕШЕНИЕ ВОЛНОВОГО УРАВНЕНИЯ ДЛЯ БОКОВИНЫ ПНЕВМАТИЧЕСКОЙ ШИНЫ Р. С. Якушев Казанский государственный университет, Казань, Россия Пневматические шины – наиболее распространенный движитель в транспортных системах, т.к. позволяют достичь хорошего сцепления с поверхностью дороги и бесшумности хода, смягчают толчки и удары при наезде на препятствия и неровности дороги. Задачи обеспечения комфортабельности перевозки пассажиров, безопасности движения на больших скоростях, увеличения грузоподъемности делают расчет автомобильных шин актуальной проблемой механики [1–2]. Боковину шины можно рассматривать как полый цилиндр, подвергающийся кручению, и воспользоваться цилиндрической системой координат. Граничные условия следуют из сути работы шины: внутренняя поверхность скреплена с абсолютно жестким ободом колеса, а наружная – с жестким твердым контуром – протектором, укрепленным брекерным слоем. Материал пневматической шины в основе своей резина. Она не меняет объём при деформировании и может испытывать большие искажения. Поэтому материальное соотношение нужно записать с учетом конечных деформаций. Воспользуемся полулинейной моделью материала, предложенной Джоном [3]: Pˆ Pˆ R . Дифференциальное уравнение, описывающее движение среды, имеет вид P̂ 0 R , (1) где P̂ – тензор Пиолы, 0 – плотность резины, R R ( r , t ) – координата точки в актуальной системе координат. Штрих означает производную по аргументу r , точка – по времени t . Разрешающее уравнение (1) в проекциях – это система двух нелинейных уравнений R k R kR 2 0 R R 2 , r R kR k R r 0 R 2 R , где k 2 2 (2) . 2 R 2 R ( R ) r Они описывают динамический процесс распространения волн – распространяющихся вдоль радиуса (волны расширения или сжатия) и в тангенциальном направлении (волны сдвига). В правой части уравнений присутствуют нелинейные слагаемые: центробежная и кориолисова силы инерции. Введем комплексную переменную R R eiψ . Умножим первое уравнение системы (2) на eiψ , второе – на ieiψ ; затем сложим их. Тогда имеем 0 k k r rR 0 R или r rR r (rR) , где k 2 2r . rR rR Вводя безразмерные r R x, Y yei и заменяя U xY , получаем r0 r0 2 U x x U 2( ) 0 r02U x U x Откуда, при замене (3) x2 , следует 2 0 r02 ( ) U U 2 U. ( 2 ) U ( 2 ) Это нелинейное волновое уравнение в комплексной плоскости, действительная часть решения которого описывает радиальные волны, а мнимая часть – волны сдвига. В частном случае – при отсутствии сдвига, угол 0 и система (2) сводится к одному линейному уравнению распространения продольных цилиндрических волн R k R r 0 R . Его решение в безразмерных переменных будет xy x f x, 2 1 , r1 1. r0 Для случая статической постановки задачи имеем полый цилиндр, внутренний обод которого повернут на некоторый угол по отношению к внешнему контуру. Такая задача описывается уравнением (3) без правой части, то есть здесь отношение внешнего радиуса к внутреннему 2 U x U 2( ) const . U x x 2 ( yx ) 2 yx 2 a, x x 2 Иначе это ( yx ) Arcctg yx b, где a и b постоянные. r0 0 , R r0 r0 , Граничные условия задачи имеют вид: r1 0; R r1 r1 . Тогда удается найти решение в замкнутой форме и определить напряженно-деформированное состояние боковины. При кручении боковины обнаруживается эффект Суюншкалиева: как и при кручении цилиндра радиус материальной окружности боковины шины уменьшается, и в ней возникает натяг. Рассмотренная задача оказалась очень интересной с точки зрения изучения нелинейных деформаций, тем более она актуальна и имеет практическое значение для механики транспортных средств. TRR 1440 1420 1400 1380 1360 1340 1.5 2 2.5 3 x T 3000 2750 2500 2250 2000 1750 1500 1.5 2 2.5 x3 x 1.5 2 2.5 3 -200 -400 -600 -800 -1000 TR Рис. 1. Графики компонент тензора напряжений ( 3, 45 ) ЛИТЕРАТУРА 1. Биргер И.А. Прочность и надежность машиностроительных конструкций. Избранные труды ИМАШ им. А. А. Благонравова РАН. – М., Уфа: УАТУ, 1998. – 352 с. 2. Бухин Б.Л. Математические модели в механике и конструировании шин // Каучук и резина. – 1996. – № 1. – С. 16–20 3. Лурье А.И. Нелинейная теория упругости. – М.: Наука, 1980. – 512 с.