метод функций ляпунова для систем со скользящими режимами
advertisement

Автоматика и телемеханика, № 5, 2011
c 2011 г.
⃝
А.Е. ПОЛЯКОВ, канд. физ.-мат. наук
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
А.С. ПОЗНЯК, д-р техн. наук
(Центр исследований и обучения Национального политехнического института Мексики,
Мехико)
МЕТОД ФУНКЦИЙ ЛЯПУНОВА ДЛЯ СИСТЕМ
СО СКОЛЬЗЯЩИМИ РЕЖИМАМИ ВЫСШИХ ПОРЯДКОВ
Предложен метод построения функций Ляпунова для систем управления со
скользящими режимами высших порядков, основанный на использовании метода характеристик для решения специального уравнения в частных производных
первого порядка. Успешное разрешение такого уравнения позволяет построить
функцию Ляпунова, которая доказывает конечное время сходимости и предоставляет явную оценку времени вхождения в скользящий режим.
1. Введение
В основополагающей работе А.М. Ляпунова конца XIX-го в. был предложен простой подход к проблеме исследования устойчивости положения равновесия системы обыкновенных дифференциальных уравнений (ОДУ). Идея подхода состоит в
обобщении понятия “энергия”, с помощью которого можно анализировать устойчивость или неустойчивость системы, используя лишь информацию о правой части, не
отыскивая точного решения. Вначале данные методы применялись лишь для ОДУ,
правые части которых непрерывны по обеим переменным: времени и состоянию.
Позднее некоторые авторы [1, 2] стали исследовать более широкий класс дифференциальных уравнений, где правые части являются разрывными по этим переменным. Такие уравнения в настоящее время рассматриваются как дифференциальные
включения. К ним же относятся так называемые системы со скользящими режимами, которые привлекают внимание исследователей на протяжении последних 40 лет
[3–6].
Одной из наиболее важных особенностей систем со скользящими режимами является конечное время вхождения в поверхность скольжения. Соответствующие
функции Ляпунова могут быть негладкими в этом случае. Например, в [2] для систем скольжения первого порядка, простейшая из которых имеет вид:
(1.1)
(1.2)
𝑥(𝑡)
˙
= −𝑟 sign [𝑥(𝑡)] ,
{
1,
−1,
sign [𝑥] :=
∈ [−1, 1] ,
𝑟 > 0,
если 𝑥 > 0,
если 𝑥 < 0,
если 𝑥 = 0,
функция Ляпунова равна 𝑉 (𝑥) = ∣𝑥∣, и ее полная производная (при 𝑥 ∕= 0), в силу
системы (1.1), удовлетворяет
𝑉˙ (𝑥(𝑡)) = −𝑟.
Отсюда 0 ⩽ 𝑉 (𝑥(𝑡)) = 𝑉 (𝑥(0)) − 𝑟𝑡 и время вхождения 𝑡𝑟𝑒𝑎𝑐ℎ = 𝑉 (𝑥(0))/𝑟.
Для систем скольжения второго порядка (см. [3]), таких как
(1.3)
𝑥
¨(𝑡) = −𝑟1 sign [𝑥(𝑡)] − 𝑟2 sign [𝑥(𝑡)],
˙
𝑟1 > 𝑟2 > 0,
47
доказательство сходимости за конечное время и оценка этого времени были получены, по большей части, методами дифференциальной геометрии на плоскости [3],
которые так и не удалось перенести на векторный случай. Позднее в [7] для системы (1.3) была найдена функция Ляпунова
(1.4)
𝑉 (𝑥, 𝑥)
˙ = 𝑟1 ∣𝑥∣ + 𝑥˙ 2 /2,
которая может гарантировать лишь асимптотическую устойчивость, поскольку
𝑉˙ (𝑥(𝑡), 𝑥(𝑡))
˙
⩽ 0. Современные методы исследования систем скольжения высших порядков основаны на принципе однородности [8–10], согласно которому асимптотически устойчивая однородная система сходится за конечное время. Однако в рамках
такого подхода не удается получить оценку времени вхождения в скользящий режим. Таким образом, не было предложено единого метода, который позволил бы доказать сходимость системы за конечное время и давал оценку этого времени. Данная
работа посвящена развитию метода функций Ляпунова для систем со скользящими
режимами высших порядков, позволяющему решить указанные проблемы.
2. Метод построения функций Ляпунова с конечным временем сходимости
2.1. Описание системы
Рассмотрим систему управления вида
{
𝑥˙ = 𝑔(𝑥, 𝑦),
(2.1)
𝑦˙ = 𝑎(𝑥, 𝑦) + 𝑏(𝑥, 𝑦)𝑢 + 𝑓 (𝑡, 𝑥, 𝑦),
где 𝑥 ∈ ℝ𝑘 , 𝑦 ∈ ℝ𝑛 – компоненты вектора состояний системы, 𝑔 : ℝ𝑘 × ℝ𝑛 → ℝ𝑘 ,
𝑎 : ℝ𝑘 × ℝ𝑛 → ℝ𝑛 – гладкие вектор-функции, 𝑢 ∈ ℝ𝑚 – вектор управляющих входов,
𝑏 : ℝ𝑘 × ℝ𝑛 → ℝ𝑛×𝑚 – матрица коэффициентов усиления обратных связей и 𝑓 :
ℝ+ × ℝ𝑘 × ℝ𝑛 → ℝ𝑛 – неизвестная, но ограниченная функция, т.е.
(2.2)
∣𝑓𝑗 (𝑡, 𝑥, 𝑦)∣ ⩽ 𝐶𝑗
∀𝑥 ∈ ℝ𝑘 ,
∀𝑦 ∈ ℝ𝑛 ,
∀𝑡 ⩾ 0,
𝑗 = 1, 𝑛.
Предполагается, что некоторое стабилизирующее управление 𝑢 уже построено:
(2.3)
𝑢 = 𝑢¯(𝑥, 𝑦)
(допускается, что 𝑢 может быть разрывным) и необходимо доказать устойчивость
(просто асимптотическую или с конечным временем сходимости) нулевого решения (0, 0) системы (2.1) с управлением (2.3), используя метод функции Ляпунова.
2.2. Обобщение метода Зубова
Пусть 𝑉 (𝑥, 𝑦) – непрерывная функция и почти всюду её производная вдоль траекторий системы (2.1) может быть оценена как
(2.4)
𝑉˙ = ⟨∇𝑥 𝑉, 𝑔(𝑥, 𝑦)⟩ + ⟨∇𝑦 𝑉, 𝑎(𝑥, 𝑦) + 𝑏(𝑥, 𝑦)¯
𝑢(𝑥, 𝑦) + 𝑓 (𝑡, 𝑥, 𝑦)⟩ ⩽
⩽ ⟨∇𝑥 𝑉, 𝑔(𝑥, 𝑦)⟩ + ⟨∇𝑦 𝑉, 𝑎(𝑥, 𝑦) + 𝑏(𝑥, 𝑦)¯
𝑢(𝑥, 𝑦)⟩ + ⟨∣∇𝑦 𝑉 ∣ , 𝐶⟩ ,
где ⟨⋅, ⋅⟩ означает скалярное произведение, ∣∇𝑦 𝑉 ∣ =
𝐶 = (𝐶1 , 𝐶2 , . . . , 𝐶𝑛 )⊤ . Обозначая
ℎ𝑗 (𝑥, 𝑦, 𝛾𝑗 ) := 𝑎𝑗 (𝑥, 𝑦) + 𝑏𝑗 (𝑥, 𝑦)¯
𝑢(𝑥, 𝑦) + 𝛾𝑗 ,
48
(
∂𝑉 ,
∂𝑦1
𝑗 = 1, 𝑛,
∂𝑉 ∂𝑉 )⊤
и
, . . . , ∂𝑦2
∂𝑦𝑛
неравенство (2.4) можно переписать в покомпонентной форме:
(
[
])
𝑘
𝑘
∑
∑
𝑑𝑉
∂𝑉
∂𝑉
∂𝑉
⩽
𝑔𝑖 (𝑥, 𝑦) +
ℎ𝑗 𝑥, 𝑦, 𝐶𝑗 sign
.
𝑑𝑡
∂𝑥𝑖
∂𝑦𝑗
∂𝑦𝑗
𝑖=1
𝑗=1
Будем отыскивать функцию Ляпунова 𝑉 (𝑥, 𝑦) как непрерывное положительно определенное решение дифференциального уравнения в частных производных вида
𝑘
∑
(2.5)
𝑘
𝑔𝑖 (𝑥, 𝑦)
𝑖=1
где 𝛾𝑗 = 𝐶𝑗 sign
[
∑
∂𝑉
∂𝑉
+
ℎ𝑗 (𝑥, 𝑦, 𝛾𝑗 )
= −𝑞𝑉 𝜌 ,
∂𝑥𝑖 𝑗=1
∂𝑦𝑗
∂𝑉
∂𝑦𝑗
]
и 𝑞 > 0, 𝜌 > 0 – некоторые положительные параметры.
З а м е ч а н и е 1. Если 𝑉 (𝑥, 𝑦) – подходящее решение уравнения (2.5), то справедливо неравенство
𝑑𝑉 (𝑥(𝑡), 𝑦(𝑡))
⩽ −𝑞𝑉 𝜌 (𝑥(𝑡), 𝑦(𝑡))
𝑑𝑡
и в случае 𝜌 < 1 получаем функцию Ляпунова с конечным временем сходимости
1
[𝑉 (𝑥(0), 𝑦(0))]1−𝜌 , а при 𝜌 ⩾ 1 эта функция гарантирует лишь асимп𝑡𝑟𝑒𝑎𝑐ℎ ⩽
𝑞(1 − 𝜌)
тотическую устойчивость.
Для решения уравнения (2.5) необходимо
[ знать
] кусочно-постоянные функции 𝛾𝑗 ,
∂𝑉
которые, в свою очередь, зависят от sign
. К счастью, поскольку 𝛾𝑗 может
∂𝑦𝑗
принимать только два возможных значения 𝐶𝑗 и −𝐶𝑗 , то можно рассматривать (2.5)
предполагая, что 𝛾𝑗 равно одной из указанных констант. Точное значение для 𝛾𝑗
можно будет определить лишь после отыскания общего вида функции 𝑉 (𝑥, 𝑦).
Идея отыскания функции Ляпунова в виде решения уравнения в частных производных впервые была высказана В.И. Зубовым [11]. Предложенное авторами обобщение метода Зубова разрешает правым частям уравнения (2.5) нелинейно зависеть
также и от искомой функции 𝑉 . Именно такое обобщение позволяет найти функции
Ляпунова с конечным временем сходимости.
2.3. Метод характеристик
Решение уравнения (2.5) с постоянным 𝛾 может быть найдено при использовании
так называемого метода характеристик [12]. В соответствии с этим методом можно
сформулировать следующую лемму.
Л е м м а 1. Если абсолютно непрерывная положительно определенная функция
𝑉 (𝑥, 𝑦) удовлетворяет системе ОДУ
𝑑𝑥1
𝑑𝑥𝑘
𝑑𝑦1
𝑑𝑦𝑛
𝑑𝑉
= ... =
=
= ... =
=
𝑔1 (𝑥, 𝑦)
𝑔𝑘 (𝑥, 𝑦)
ℎ1 (𝑥, 𝑦, 𝛾1 )
ℎ𝑛 (𝑥, 𝑦, 𝛾𝑛 )
−𝑞𝑉 𝜌
(2.6)
2
2
при ∥𝑥∥ + ∥𝑦∥ > 0, то эта функция является решением уравнения (2.5).
Доказательства этого и последующих утверждений даны в Приложении.
Предположим, что удалось найти первые интегралы системы (2.6)
(2.7)
𝜑𝑖 (𝑉, 𝑥, 𝑦, 𝛾, 𝑞, 𝜌) = const := 𝑐𝑖 ,
𝑖 = 1, 𝑛 + 𝑘.
49
Поскольку всякая функция от констант тоже является константой (в частном случае
просто равна нулю), то функция 𝑉 (𝑥, 𝑦, 𝛾, 𝑞, 𝜌) может быть найдена как решение
нелинейного алгебраического уравнения
(2.8)
Φ(𝜑1 (𝑉, 𝑥, 𝑦, 𝛾, 𝑞, 𝜌), . . . , 𝜑𝑛+𝑘 (𝑉, 𝑥, 𝑦, 𝛾, 𝑞, 𝜌)) = 0,
где Φ(𝜑1 , . . . , 𝜑𝑛+𝑘 ) – произвольная функция. Всякое аналитическое решение уравнения (2.8) определяет возможного кандидата на функцию Ляпунова. Однако
функцию Φ и параметры 𝛾, 𝑞, 𝜌 необходимо подобрать так, чтобы найденная функция 𝑉 (𝑥, 𝑦) была абсолютно непрерывной и положительно определенной.
З а м е ч а н и е 2. Очевидно, что предлагаемый метод не дает формального алгоритма построения функции Ляпунова. Он лишь помогает получать кандидата
на функцию Ляпунова, сведя при этом проблему отыскания подходящей “энергетической” функции к проблеме корректного определения параметров функциикандидата.
Используя предложенный метод, далее будут построены функции Ляпунова с
конечным временем сходимости (0 < 𝜌 < 1) для систем скольжения второго порядка.
3. Построение функции Ляпунова для алгоритма “скручивания”
3.1. Описание системы
Рассмотрим систему управления вида
{
𝑥˙ = 𝑦,
(3.1)
𝑦˙ = 𝑓 (𝑡, 𝑥, 𝑦) + 𝑢(𝑡),
где 𝑥, 𝑦 ∈ ℝ – переменные состояния, 𝑓 (𝑡, 𝑥, 𝑦) – неизвестная, но ограниченная функция, описывающая внешние возмущения и неопределенности системы, 𝑢 ∈ ℝ – скользящее управление второго порядка:
(3.2)
𝑢(𝑡) = −𝑟1 sign [𝑥(𝑡)] − 𝑟2 sign [𝑦(𝑡)],
где 𝑟1 , 𝑟2 > 0 – параметры управления, а оператор sign [⋅] определен в виде (1.2).
Данный алгоритм управления известен как алгоритм “скручивания” [13, 14]1 .
Предполагается, что
(3.3)
∣𝑓 (𝑡, 𝑥, 𝑦)∣ ⩽ 𝐶
∀𝑥, 𝑦 ∈ ℝ и ∀𝑡 ⩾ 0,
где 𝐶 – некоторая известная константа.
Задача авторов – построить функцию Ляпунова, которая доказывает сходимость
решений системы (3.3) в начало координат (0, 0) за конечное время, и найти оценку
этого времени.
3.2. Отыскание функции-кандидата
Пусть для непрерывной функции 𝑉 (𝑥, 𝑦) имеем следующую оценку полной производной, вычисленной вдоль траекторий системы (3.1)
(3.4)
1
50
∂𝑉
∂𝑉
𝑑𝑉
=𝑦
+ (𝑢 + 𝑓 (𝑡, 𝑥, 𝑦))
⩽
𝑑𝑡
∂𝑥
∂𝑦
(
[
])
∂𝑉
∂𝑉
∂𝑉
∂𝑉
∂𝑉
⩽ 𝑦
+ 𝑢 + 𝐶 sign
=𝑦
− sign [𝑥]𝛾
:
∂𝑥
∂𝑦
∂𝑦
∂𝑥
∂𝑦
[
]
∂𝑉
𝛾 = 𝑟1 + 𝑟2 sign [𝑥𝑦] − 𝛾0 , 𝛾0 = 𝐶 sign 𝑥
.
∂𝑦
В англоязычной литературе этот алгоритм носит название “twist”.
В соответствии с предложенным методом получаем уравнение (2.5) в виде
(3.5)
𝑦
∂𝑉
∂𝑉
− sign [𝑥]𝛾
= −𝑘𝑉 1/2 ,
∂𝑥
∂𝑦
где 𝑘 > 0 – некоторый положительный параметр. Предполагая, что 𝛾0 является константой, найдем решение (3.5). Соответствующая система (2.6) характеристических
уравнений имеет вид
(3.6)
𝑑𝑥
𝑑𝑦
𝑑𝑉
√ ,
=
=
𝑦
− sign [𝑥]𝛾
−𝑘 𝑉
а первые интегралы – соответственно
(3.7)
𝑦2
𝜑1 (𝑥, 𝑦) = ∣𝑥∣ +
,
2𝛾
√
𝑦 sign [𝑥] 2 𝑉
𝜑2 (𝑉, 𝑦) =
−
.
𝛾
𝑘
Выберем Φ в виде:
(3.8)
√
Φ(𝜑1 , 𝜑2 ) = 𝑘0 𝜑1 + 𝜑2 = 0,
где 𝑘0 – вещественный параметр. Подстановка (3.7) в (3.8) приводит к уравнению
(3.9)
√
√
𝑦 sign [𝑥]
𝑦2
2 𝑉
=
+ 𝑘0 ∣𝑥∣ +
.
𝑘
𝛾
2𝛾
Очевидно, правая часть уравнения (3.9) имеет смысл только тогда, когда 𝛾 > 0 или,
что то же самое, при 𝑟1 > 𝑟2 + 𝐶. Кроме того, левая часть уравнения (3.9) всегда
неотрицательная, поэтому
√
sign [𝑥𝑦] 2/𝛾
(3.10) 𝑘0 > − √
.
1 + 2𝛾∣𝑥∣/𝑦 2
Тогда функция 𝑉 (𝑥, 𝑦) может быть найдена из (3.9) в виде:
(3.11)
𝑘2
𝑉 (𝑥, 𝑦) =
4
(
𝑦 sign [𝑥]
+ 𝑘0
𝛾
√
𝑦2
∣𝑥∣ +
2𝛾
)2
.
3.3. Устранение разрывов
Легко видеть, что в общем случае функция (3.11) является разрывной и необходимо подобрать параметры 𝑘0 и 𝑘 так, чтобы устранить разрывы.
Рассмотрение пределов функции 𝑉 (𝑥, 𝑦) при 𝑥, стремящемся к нулю для любого
фиксированного 𝑦, и при 𝑦, стремящемся к нулю для любого фиксированного 𝑥,
приводит к следующим выражениям:
(
)2
𝑘0
𝑘 2 sign [𝑥𝑦]
+√
𝑦2,
4
𝛾
2𝛾
𝑘 2 𝑘02
𝑉 (𝑥, 𝑦) →
∣𝑥∣ .
4
при 𝑥 → 0 𝑉 (𝑥, 𝑦) →
при 𝑦 → 0
51
Тогда для устранения разрывов на прямых 𝑥 = 0 и 𝑦 = 0 достаточно решить систему
⎧
(
)2
⎨ 𝑘 2 sign [𝑥𝑦] + √𝑘0
= 𝑘¯2 ,
𝛾
2𝛾
⎩
𝑘 2 𝑘02 = 1
¯ Отсюда получаем:
для некоторого числа 𝑘.
√
√ 𝛾 √ ¯
2 sign [𝑥𝑦]
√
(3.12) 𝑘 =
.
2𝛾 𝑘 − 1 > 0, 𝑘0 =
2
𝛾 2𝛾 𝑘¯ − 1
Объединяя (3.12) с условием (3.10), можно сформулировать следующий результат.
Л е м м а 2. Если 𝑟1 > 𝑟2 + 𝐶, 𝑟2 > 𝐶 и 𝑘¯ удовлетворяет неравенству
(3.13)
1
1
√
< 𝑘¯ < √
,
2(𝑟1 + 𝑟2 − 𝐶)
2(𝑟1 − 𝑟2 + 𝐶)
то 𝑘0 > 0 и условие (3.10) выполнено при всех 𝑥𝑦 ∕= 0.
Таким образом, доопределенная по непрерывности функция Ляпунова (3.11) имеет вид
⎧
√
(
)2
2
2
𝑘
𝑦
sign
[𝑥]
𝑦
+ 𝑘0 ∣𝑥∣ +
при 𝑥𝑦 ∕= 0,
⎨ 4
𝛾
2𝛾
(3.14) 𝑉 (𝑥, 𝑦) =
𝑘¯2 𝑦 2 /4
при 𝑥 = 0,
⎩
∣𝑥∣/4
при 𝑦 = 0,
где 𝑘, 𝑘0 вычисляются по (3.12) и 𝑘¯ удовлетворяет (3.13).
3.4. Основная теорема для алгоритма “скручивания”
∂𝑉
Несложно показать, что частная производная
в общем случае меняет знак
∂𝑦
√
на кривой 𝐿 ∣𝑥∣ sign [𝑥] + 𝑦 = 0, здесь 𝐿 – некоторая константа, зависящая от параметров
Однако определяя 𝛾 (см. (3.4)) как функцию от
[ √ системы (3.1)–(3.3).
]
sign 𝐿 ∣𝑥∣ sign [𝑥] + 𝑦 , придется снова ликвидировать разрывы функции Ляпунова. Поэтому более приемлемым является выбор 𝛾 в виде:
(3.15)
𝛾 := 𝑟1 + (𝑟2 − 𝐶) sign [𝑥𝑦]
несмотря на то, что это выбор ведет к ухудшению оценок в основной теореме.
Т е о р е м а 1. Если 𝑟1 > 𝑟2 + 𝐶 и 𝑟2 > 𝐶, то функция 𝑉 (𝑥, 𝑦) вида (3.14) с 𝛾 в
форме (4.25) обладает следующими свойствами:
1) 𝑉 (𝑥, 𝑦) является непрерывной положительно определенной функцией во всем
пространстве ℝ2 и непрерывно-дифференцируемой при 𝑥𝑦 ∕= 0;
2) полная производная функции 𝑉 (𝑥, 𝑦) вдоль траекторий системы (3.1)–(3.3)
удовлетворяет неравенству
(3.16)
52
𝑑
𝑟1 − 𝑟2 − 𝐶 √
𝑉 (𝑥(𝑡), 𝑦(𝑡)) ⩽ −𝑘min
𝑉 (𝑥(𝑡), 𝑦(𝑡))
𝑑𝑡
𝑟1 − 𝑟2 + 𝐶
3
2
2
1
1
0
0
y
y
3
–1
–1
–2
–2
–3
–2
–1
0
x
1
2
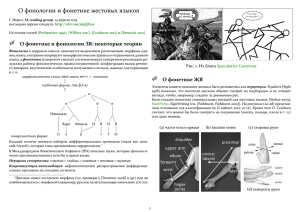
Рис. 1. Линии уровня функции Ляпунова для контроллера ”скручивания”.
–3
–2
–1
0
x
1
2
Рис. 2. Траектория системы с контроллером ”скручивания”.
почти при всех 𝑡 с
𝑘min
𝑟1 + (𝑟2 − 𝐶)𝛿
√
:= min(𝑘) = min
𝛿∈{−1,1}
2
√
1
¯
𝑘 2 − √
;
𝑟1 + (𝑟2 − 𝐶)𝛿 3) соответствующее гарантированное время сходимости имеет оценку
(3.17)
𝑡𝑟𝑒𝑎𝑐ℎ ⩽
2 (𝑟1 − 𝑟2 + 𝐶) √
𝑉 (𝑥(0), 𝑦(0)).
𝑘min (𝑟1 − 𝑟2 − 𝐶)
З а м е ч а н и е 3. Используя построенную функцию Ляпунова (3.14), можно легко доказать локальную сходимость системы (3.1)–(3.2) за конечное время для случая
когда условие (3.3) выполнено только в некоторой локальной окрестности начала
координат 𝐷0 , а область начальных данных 𝐷(𝑐max ) определена из соотношений
𝐷(𝑐) = {(𝑥, 𝑦)⊤ ∈ R2 : 𝑉 (𝑥, 𝑦) ⩽ 𝑐} и 𝑐max = max 𝑐.
𝑐:𝐷(𝑐)⊆𝐷0
3.5. Численный пример для алгоритма “скручивания”
Пусть система (3.1)–(3.3) имеет следующие параметры:√𝑟1 = 1,3, 𝑟2 = 0,7, 𝐶 = 0,1.
Соответствующая функция Ляпунова (3.14) для 𝑘¯ = 0,9/ 2 имеет вид:
⎧
(
)2
√
√
(0,9 𝛾 − 1)2
2𝛾∣𝑥∣ + 𝑦 2
∣𝑦∣ +
при 𝑥𝑦 ∕= 0,
√
⎨
8𝛾
0,9 𝛾 − 1
𝑉 (𝑥, 𝑦) =
0,10125𝑦 2
при 𝑥 = 0,
⎩
0,25∣𝑥∣
при 𝑦 = 0,
где 𝛾 = 1,3 + 0,6 sign [𝑥𝑦]. На рис. 1 представлены линии уровня данной функции
Ляпунова. Численное моделирование переходного процесса (рис. 2) для 𝑓 (𝑡, 𝑥, 𝑦) =
= 𝐶 sign (𝑦) показало сходимость решения системы (3.1)–(3.3) из точки (1, −2) в
начало координат за время 𝑡𝑒𝑥
𝑟𝑒𝑎𝑐ℎ = 8,72, оценка методом функции Ляпунова равна
𝑡𝑒𝑠𝑡
⩽
15,63.
𝑟𝑒𝑎𝑐ℎ
53
4. Построение функции Ляпунова для алгоритма “супер-скручивания”
4.1. Описание системы
Рассмотрим систему
(4.1)
𝑥˙ = 𝑢(𝑡) + 𝜑(𝑡),
где 𝑥 ∈ ℝ – скалярная переменная, 𝜑(𝑡) – неизвестная функция, описывающая
неопределенности в параметрах модели и внешние возмущения, 𝑢 ∈ ℝ – так называемый контроллер “супер-скручивания” (“super-twist”) [13, 15]:
(4.2)
(4.3)
𝑢(𝑡) = 𝑢1 (𝑡) + 𝑢2 (𝑡),
{
√
𝑢1 (𝑡) = −𝛼 ∣𝑥(𝑡)∣ sign [𝑥(𝑡)],
𝑢˙ 2 (𝑡) = −𝛽 sign [𝑥(𝑡)],
𝛼 > 0,
𝛽 > 0,
где 𝛼 > 0 и 𝛽 > 0 – параметры управления и оператор sign [⋅] определен в виде (1.2).
Предполагается, что
(4.4)
∣𝜑(𝑡)∣
˙
⩽ 𝐿 ∀𝑡 ⩾ 0
с известной константой 𝐿.
Исходная система (4.1) с помощью преобразования
(4.5)
𝑦(𝑡) = 𝜑(𝑡) − 𝛽
∫𝑡
sign [𝑥(𝜏 )]𝑑𝜏
0
может быть сведена к виду
{
√
𝑥(𝑡)
˙
= −𝛼 ∣𝑥(𝑡)∣ sign [𝑥(𝑡)] + 𝑦(𝑡),
(4.6)
𝑦(𝑡)
˙ = 𝜑(𝑡)
˙ − 𝛽 sign [𝑥(𝑡)],
удобному для применения изложенного выше метода построения функций Ляпунова.
Теперь чтобы доказать существование скользящего режима второго порядка в системе (4.1), достаточно построить функцию Ляпунова, гарантирующую сходимость
решения системы (4.6) к началу координат (0, 0) за конечное время.
4.2. Отыскание функции-кандидата
Пусть непрерывной функции 𝑉 (𝑥, 𝑦) почти всюду имеем:
( √
) ∂𝑉
𝑑𝑉
∂𝑉
∂𝑉
∂𝑉
=
𝑥˙ +
𝑦˙ ⩽ −𝛼 ∣𝑥∣ sign [𝑥] + 𝑦
− sign [𝑥]𝛾
,
𝑑𝑡
∂𝑥
∂𝑦
∂𝑥
∂𝑦
[
]
∂𝑉
(4.7)
𝛾 = 𝛽 − 𝐿 sign 𝑥
.
∂𝑦
В соответствии с предложенным методом уравнение (2.5) принимает вид
(
) ∂𝑉
√
∂𝑉
1
(4.8)
𝑦 − 𝛼 ∣𝑥∣ sign [𝑥]
− sign [𝑥]𝛾
= −𝑘𝑉 2 ,
∂𝑥
∂𝑦
где 𝑘 > 0 – параметр. Полагая 𝛾 константой, найдем решение уравнения (4.8).
54
Соответствующая система (2.6) характеристических уравнений имеет вид
(4.9)
𝑑𝑥
𝑑𝑦
𝑑𝑉
√
√ .
=
=
−sign [𝑥]𝛾
−𝛼 ∣𝑥∣ sign [𝑥] + 𝑦
−𝑘 𝑉
Используя замену переменных
√
∣𝑥∣ sign [𝑥]
𝑧=
,
𝑦
первое уравнение системы (4.9) сводится к уравнению с разделяющимися переменными
(4.10)
−
2𝛾𝑧𝑑𝑧
𝑑𝑦
=
.
− 𝛼𝑧 + 1
𝑦
2𝛾𝑧 2
Считая 𝛼2 < 8𝛾, из (4.10) находим первый интеграл системы (4.9):
(4.11)
𝜓1 (𝑥, 𝑦) =
ln ∣𝑠(𝑥, 𝑦)∣
+ 𝑚(𝑥, 𝑦),
2
где 𝑔 = 8𝛾/𝛼2 > 1 и
(4.12)
(4.13)
√
𝑠(𝑥, 𝑦) = 2𝛾∣𝑥∣ − 𝛼 ∣𝑥∣ sign [𝑥]𝑦 + 𝑦 2 ,
( √
)
𝛼𝑔 ∣𝑥∣ sign [𝑥] − 2𝑦
1
√
𝑚(𝑥, 𝑦) = √
arctg
.
𝑔−1
2 𝑔 − 1𝑦
Второе уравнение системы (4.9) уже является уравнением с разделяющимися
переменными, тогда
√
𝑦 sign [𝑥] 2 𝑉
(4.14) 𝜓2 (𝑦, 𝑉 ) =
−
.
𝛾
𝑘
Выберем Φ как
(4.15)
Φ(𝜓1 , 𝜓2 ) = 𝑘0 𝑒𝜓1 + 𝜓2 = 0,
где 𝑘0 – вещественный параметр. Подстановка (4.11) и (4.14) в (3.8) дает
√
√
2 𝑉
𝑦 sign [𝑥]
(4.16)
=
+ 𝑘0 𝑒𝑚(𝑥,𝑦) 𝑠(𝑥, 𝑦),
𝑘
𝛾
где 𝑠(𝑥, 𝑦) и 𝑚(𝑥, 𝑦) имеют вид (4.12) и (4.13) соответственно.
Л е м м а 3. Если 𝑔 > 1, то 𝑠(𝑥, 𝑦) > 0 при 𝑥2 + 𝑦 2 ∕= 0.
Уравнение (3.9) корректно лишь в случае положительности его правой части при
𝑥2 + 𝑦 2 ∕= 0. Отсюда получаем условие
(4.17)
𝑘0 > −
sign [𝑥]𝑦
√
.
𝑠(𝑥, 𝑦)
𝛾𝑒𝑚(𝑥,𝑦)
В этом случае кандидат на функцию Ляпунова 𝑉 (𝑥, 𝑦) имеет вид:
(
)2
√
𝑘 2 𝑦 sign [𝑥]
𝑚(𝑥,𝑦)
(4.18) 𝑉 (𝑥, 𝑦) =
+ 𝑘0 𝑒
𝑠(𝑥, 𝑦) ,
4
𝛾
где 𝑠(𝑥, 𝑦) и 𝑚(𝑥, 𝑦) имеют вид (4.12) и (4.13) соответственно.
55
4.3. Устранение разрывов
Как и в случае алгоритма “скручивания”, следующий шаг состоит в устранении
разрывов функции (4.18) посредством специального выбора параметров 𝑘 и 𝑘0 .
Рассмотрение пределов функции 𝑉 (𝑥, 𝑦) при 𝑥, стремящемся к нулю для любого
фиксированного 𝑦, и при 𝑦, стремящемся к нулю для любого фиксированного 𝑥,
приводит к выражениям:
(
(
(
)))2
𝑘 2 𝑦 2 sign [𝑥𝑦]
1
1
+ 𝑘0 exp − √
при 𝑥 → 0 𝑉 (𝑥, 𝑦) →
arctg √
,
4
𝛾
𝑔−1
𝑔−1
(
)
𝑘 2 𝑘02
𝜋 sign [𝑥𝑦]
√
exp
𝛾∣𝑥∣,
при 𝑦 → 0 𝑉 (𝑥, 𝑦) →
2
𝑔−1
и для устранения разрывов достаточно решить систему
⎧
(
(
(
)))2
sign [𝑥𝑦]
1
1
2
√
√
𝑘
+
𝑘
exp
−
arctg
= const,
0
⎨
𝛾
𝑔−1
𝑔−1
)
(
𝜋 sign [𝑥𝑦]
2 2
√
𝛾 = const.
𝑘 𝑘0 exp
⎩
𝑔−1
Получаем:
(4.19)
(4.20)
(
(
)
)
1
1
𝜋 sign [𝑥𝑦] √ ¯√
𝛾 𝑘 𝑔 − exp − √
arctg √
− √
,
𝑔−1
𝑔−1
2 𝑔−1 )
(
𝜋 sign [𝑥𝑦]
sign [𝑥𝑦] exp − √
2 𝑔−1
(
(
)
)) ,
𝑘0 = (
1
1
𝜋 sign [𝑥𝑦]
√
𝛾 𝑘¯ 𝑔 − exp − √
arctg √
− √
𝑔−1
𝑔−1
2 𝑔−1
𝑘=
где 𝑘¯ – некоторое положительное число.
Л е м м а 4. Если 𝑔 > 1 и параметр 𝑘¯ удовлетворяет неравенству
(
(
)
)
1
1
𝜋
exp − √
arctg √
− √
𝑔−1
𝑔−1
2 𝑔−1
(4.21)
< 𝑘¯ <
√
𝑔
(
(
)
)
1
1
𝜋
exp − √
arctg √
+ √
𝑔−1
𝑔−1
2 𝑔−1
<
,
√
𝑔
то 𝑘0 > 0 и условие (4.17) выполнено при всех 𝑥𝑦 ∕= 0.
Таким образом, доопределенная по непрерывности функция Ляпунова (4.18) принимает вид
⎧ 2(
)2
√
𝑘
𝑦 sign [𝑥]
𝑚(𝑥,𝑦)
+
𝑘
𝑠(𝑥,
𝑦)𝑒
, 𝑥𝑦 ∕= 0,
0
⎨ 4
𝛾
(4.22) 𝑉 (𝑥, 𝑦) =
2𝑘¯2 𝑦 2 /𝛼2 ,
𝑥 = 0,
⎩
∣𝑥∣/2,
𝑦 = 0,
где 𝑘, 𝑘0 определены по формулам (4.19), (4.20), 𝑘¯ удовлетворяет (4.21), а 𝑠(𝑥, 𝑦),
𝑚(𝑥, 𝑦) имеют вид (4.12), (4.13) соответственно.
56
4.4. Основная теорема для алгоритма “супер-скручивания”
Теперь следует вспомнить, что 𝛾 не является константой и зависит от sign
[ ∂𝑉 ]
.
∂𝑦
Следующая лемма позволяет упростить выбор подходящего 𝛾.
Л е м м а 5. Если выполнены условия леммы 4 и
(
(
)
)
1
1
𝜋
arctg √
− √
exp − √
2
𝑔−1
𝑔−1
2 𝑔−1
(4.23) 𝑘¯ > +
,
√
𝑔
𝑔
[
]
∂𝑉
то sign
= sign [𝑦] при всех 𝑥𝑦 ∕= 0.
∂𝑦
¯ одновременно удоТаким образом, более предпочтительно выбирать параметр 𝑘,
влетворяющий условиям (4.21) и (4.23), т.е. 𝑘¯ должен принадлежать 𝐼(𝑔):
(4.24) ⎛
(
(
)
)
(
(
)
)⎞
1
𝜋
1
𝜋
1
1
arctg √
− √
arctg √
+ √
exp − √
exp − √
⎜2
𝑔−1
𝑔−1
2 𝑔−1
𝑔−1
𝑔−1
2 𝑔−1 ⎟
⎟.
𝐼(𝑔) = ⎜
,
√
√
⎝𝑔 +
⎠
𝑔
𝑔
При таком выборе 𝑘 параметр 𝛾 принимает вид:
(4.25)
𝛾 := 𝛽 − 𝐶 sign [𝑥𝑦].
Л е м м а 6. Для любого фиксированного 𝑔 > 1 интервал 𝐼(𝑔) непустой.
С другой стороны 𝑔 зависит от 𝛾 ∈ {𝛽 + 𝐿, 𝛽 − 𝐿}. Отсюда следует, что 𝑘¯ на самом
деле должен принадлежать пересечению интервалов 𝐼(𝑔 − ) и 𝐼(𝑔 + ):
(4.26)
𝑔− =
8(𝛽 − 𝐿)
,
𝛼2
𝑔+ =
8(𝛽 + 𝐿)
.
𝛼2
Таким образом, получаем дополнительные ограничения на параметры 𝛼 и 𝛽:
(4.27)
𝑎, 𝛽 > 0 : 𝐼(𝑔 − ) ∩ 𝐼(𝑔 + ) ∕= 0,
где 𝐼(𝑔) имеет вид (4.24), а 𝑔 + , 𝑔 − определены по формуле (4.26).
Т е о р е м а 2. Если 𝛼2 < 8(𝛽 − 𝐿) и условие (4.27) выполнено, то функция
𝑉 (𝑥, 𝑦) вида (4.22) с 𝑘, 𝑘0 , 𝛾 в форме (4.19), (4.20), (4.25) соответственно и
c 𝑘¯ ∈ 𝐼(𝑔 + ) ∩ 𝐼(𝑔 − ) имеет следующие свойства:
1) 𝑉 (𝑥, 𝑦) – непрерывная положительно определенная функция во всем пространстве ℝ2 и непрерывно-дифференцируемая при 𝑥𝑦 ∕= 0;
2) полная производная 𝑉 (𝑥, 𝑦) вдоль траекторий системы (4.6) удовлетворяет
неравенству
(4.28)
√
√
𝑑
𝑉 (𝑥(𝑡), 𝑦(𝑡)) ⩽ −𝑘 𝑉 (𝑥(𝑡), 𝑦(𝑡)) ⩽ −𝑘min 𝑉 (𝑥(𝑡), 𝑦(𝑡))
𝑑𝑡
почти при всех 𝑡, где
𝑘min := min(𝑘) =
{
(
)
)}
(
√ ¯√
𝛼
1
1
𝜋(8𝛽 − 𝛼2 𝑔) √
√
√
= √
min
𝑔
𝑘
𝑔
−
exp
−
arctg
−
;
𝑔−1
𝑔−1
16𝐿 𝑔 − 1 8 𝑔∈{𝑔− ,𝑔+ }
57
3) соответствующее время сходимости имеет оценку
2 √
𝑉 (𝑥(0), 𝑦(0)).
𝑡𝑟𝑒𝑎𝑐ℎ ⩽
𝑘min
Условие (4.27) задает неявные ограничения на параметры 𝛼 и 𝛽, что не очень
удобно при синтезе управления. Явные условия на параметры указывает следующая
лемма.
Л е м м а 7. Если 𝛽 > 5𝐿 и 32𝐿 < 𝛼2 < 8(𝛽 − 𝐿), то условие (4.27) выполнено.
З а м е ч а н и е 4. Оценка (4.28) полной производной функции Ляпунова достижима. Равенство в (4.28) будет иметь место при 𝜑(𝑡) : 𝜑(𝑡)
˙
≡ 𝐿 sign [𝑦(𝑡)].
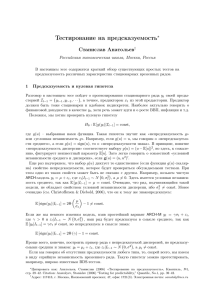
4.5. Численный пример для алгоритма “супер-скручивания”
Пусть система (4.6) имеет следующие параметры 𝛼 = 1,8, 𝛽 = 1, 𝐿 = 0,1. В этом
случае получаем 𝑔 − = 2,22, 𝑔 + = 2,72 и можем выбрать 𝑘¯ = 0,9834 ∈ 𝐼(𝑔 − ) ∩ 𝐼(𝑔 + ) =
= (0,9833; 1,2236). На рис. 3 показаны линии уровня функции Ляпунова вида (4.22) с
указанными параметрами. Численное моделирование переходного процесса (рис. 4)
для возмущений вида
{
−0,1𝑡,
если 0 ⩽ 𝑡 ⩽ 1,5,
𝜑(𝑡) =
0,1𝑡 − 0,3, если
𝑡 > 1,5,
показало сходимость решения системы (4.6) из точки (1, 0) в начало координат за
время 𝑡𝑒𝑥
𝑟𝑒𝑎𝑐ℎ = 1,6, в то время как та же оценка методом функции Ляпунова равна
𝑡𝑒𝑠𝑡
⩽
2,25.
𝑟𝑒𝑎𝑐ℎ
1,0
0,5
0,5
y
y
0
0
–0,5
–0,5
–1,0
–0,5
0
x
0,5
1,0
Рис. 3. Линии уровня функции Ляпунова
для контроллера “супер-скручивания”.
–0,8
–1,0
–0,5
0
x
0,5
2,0
Рис. 4. Траектория системы с контроллером “супер-скручивания”.
5. Построение функции Ляпунова для “вложенного” алгоритма
скольжения второго порядка
5.1. Описание системы
Рассмотрим систему (3.1), (3.3) с “вложенным” (“nested”) контроллером скользящего режима второго порядка (см. [13])
√
(5.1)
𝑢(𝑡) = −𝛼 sign [𝑦(𝑡) + 𝛽 ∣𝑥(𝑡)∣ sign (𝑥(𝑡))],
где 𝛼, 𝛽 > 0 – параметры управления и оператор sign [⋅] имеет вид (1.2).
58
В системе с управлением данного типа, решение может сходиться в начало координат двумя способами [13]. При √
2(𝛼 − 𝐶) > 𝛽 2 будет возникать скользящий режим
первого порядка на кривой 𝑦 + 𝛽 ∣𝑥∣ sign [𝑥] = 0, вдоль которой за конечное время
решение попадает в начало координат. При 2(𝛼 + 𝐶) < 𝛽 2 и некоторых дополнительных предположениях решение будет “скручиваться” в начало координат за конечное
время. Для первого случая никаких сложных построений не требуется [13], ибо доказывать нужно только возникновение скользящего
√ режима первого порядка, a из
первого уравнения системы (3.1) и условия 𝑦 + 𝛽 ∣𝑥∣ sign [𝑥] = 0 будет следовать
конечное время сходимости. Поэтому будем рассматривать только второй случай.
5.2. Отыскание функции-кандидата
Пусть для непрерывной функции 𝑉 (𝑥, 𝑦) почти всюду имеем:
(5.2)
(5.3)
𝑑𝑉
∂𝑉
∂𝑉
=𝑦
+ (𝑢(𝑡) + 𝑓 (𝑡, 𝑥, 𝑦))
⩽
𝑑𝑡
∂𝑥
∂𝑦
∂𝑉 ∂𝑉
+ 𝑢(𝑡) ∂𝑉 = 𝑦 ∂𝑉 − sign [𝑧]𝛾 ∂𝑉 ,
+ 𝐶 ⩽ 𝑦
∂𝑥
∂𝑦 ∂𝑦
∂𝑥
∂𝑦
[
]
∂𝑉
𝛾 = 𝛼 − 𝐶 sign 𝑧
,
∂𝑦
√
𝑧 = 𝑧(𝑥, 𝑦) := 𝑦 + 𝛽 ∣𝑥∣ sign (𝑥).
В соответствии с предложенным методом получаем уравнение (2.5) в виде
(5.4)
𝑦
∂𝑉
∂𝑉
− sign [𝑧]𝛾
= −𝑘𝑉 1/2 ,
∂𝑥
∂𝑦
где 𝑘 > 0 – некоторый параметр. Соответствующая система (2.6) характеристических уравнений имеет вид
𝑑𝑥
𝑑𝑦
𝑑𝑉
√ ,
(5.5)
=
=
𝑦
−sign [𝑧]𝛾
−𝑘 𝑉
а первые интегралы – соответственно
√
𝑦2
𝑦 sign [𝑧] 2 𝑉
𝜑1 (𝑥, 𝑦) = 𝑥 sign [𝑧] +
(5.6)
, 𝜑2 (𝑉, 𝑦) =
−
.
2𝛾
𝛾
𝑘
Выберем Φ в виде:
√
Φ(𝜑1 , 𝜑2 ) = 𝑘0 𝜑1 + 𝜑2 = 0,
(5.7)
где 𝑘0 – вещественный параметр. Подставляя (5.6) в (5.7) получаем уравнение
√
√
𝑦 sign [𝑧]
2 𝑉
𝑦2
(5.8)
=
+ 𝑘0 𝑥 sign [𝑧] +
.
𝑘
𝛾
2𝛾
Л е м м а 8. Если 𝛾 > 0 и 𝛽 2 > 2𝛾, то 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾) > 0 при 𝑥2 + 𝑦 2 ∕= 0.
Поскольку правая часть в (5.8) должна быть положительна при 𝑥2 + 𝑦 2 ∕= 0, то
√
2/𝛾 sign [𝑦𝑧]
(5.9)
𝑘0 > − √
.
1 + 2𝛾∣𝑥∣ sign [𝑥𝑧]/𝑦 2
В этом случае функция 𝑉 (𝑥, 𝑦) принимает вид:
√
(
)2
𝑘 2 𝑦 sign [𝑧]
𝑦2
(5.10) 𝑉 (𝑥, 𝑦) =
+ 𝑘0 𝑥 sign [𝑧] +
.
4
𝛾
2𝛾
59
5.3. Устранение разрывов
Теперь√необходимо устранить разрывы функции (5.10) на прямой 𝑥 = 0 и кривой
𝑧 = 𝑦 + 𝛽 ∣𝑥∣ sign [𝑥] = 0:
при 𝑥 → 0
при
(
√ )2
𝑉 (𝑥, 𝑦) → 𝑘 2 𝑦 2 1/𝛾 + 𝑘0 / 2𝛾 /4,
𝑧→0
(
)2
√
𝑉 (𝑥, 𝑦) → 𝑘 2 ∣𝑥∣ −𝛽 sign [𝑥𝑧]/𝛾 + 𝑘0 𝛽 2 /(2𝛾) + sign [𝑥𝑧] / 4.
Отсюда следует, что 𝑘0 и 𝑘 должны удовлетворять системе уравнений
(
√ )2
𝑘 2 1/𝛾 + 𝑘0 / 2𝛾 = 1
и
( √
)2
𝑘 2 𝑘0 𝛽 2 /(2𝛾) + sign [𝑥𝑧] − 𝛽 sign [𝑥𝑧]/𝛾 = 𝑘¯2
¯ Тогда при 𝑥𝑧 ∕= 0 имеем
для некоторого положительного 𝑘.
√
√
2
𝑘¯ + 𝛽 sign [𝑥𝑧]
2𝛾
.
√
и 𝑘 = √
(5.11) 𝑘0 =
2
¯
𝛾 𝛽 + 2𝛾 sign [𝑥𝑧] − 𝑘
2/𝛾 + 𝑘0 √
Л е м м а 9. Если 0 < 𝛾 < 𝛽 2 /2 < 2𝛾/ 3 и
√
(5.12)
𝛽 2 − 2𝛾 < 𝑘¯ < 𝛽,
то 𝑘0 > 0 и условие (5.9) выполнено при всех 𝑥2 + 𝑦 2 ∕= 0.
Таким образом, непрерывная функция Ляпунова (5.10)
⎧
√
(
)2
2
2
𝑘
𝑦
sign
[𝑧]
𝑦
+ 𝑘0 𝑥 sign [𝑧] +
𝛾
2𝛾
⎨ 4
(5.13) 𝑉 (𝑥, 𝑦) =
𝑦 2 /4
⎩
𝑘¯2 ∣𝑥∣/4
имеет вид
при
𝑥𝑧 ∕= 0,
при
𝑥 = 0,
при
𝑧 = 0,
где 𝑘, 𝑘0 определены из (5.11) и 𝑘¯ удовлетворяет неравенству (5.12).
5.4. Основная теорема для “вложенного” алгоритма
Выбирая
(5.14)
𝛾 := 𝛼 − 𝐶,
можно сформулировать следующий результат.
60
3
0
0
y
y
3
–3
0
x
3
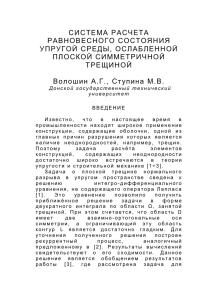
Рис. 5. Линии уровня функции Ляпунова для “вложенного” контроллера.
–3
0
x
3
Рис. 6. Траектория системы с “вложенным” контроллером.
√
√
√
Т е о р е м а 3. Если 𝛼 > 𝐶(2 + 3)/(2 − 3) и 2(𝛼 + 𝐶) < 𝛽 2 < (𝛼 − 𝐶)4/ 3, то
функция 𝑉 (𝑥, 𝑦) вида (5.13) с 𝛾, заданным в (5.14), имеет следующие свойства:
1) 𝑉 (𝑥, 𝑦) – непрерывная положительно определенная функция в пространстве ℝ2 и непрерывно дифференцируема при всех 𝑥𝑧 ∕= 0;
2) полная производная функции 𝑉 (𝑥, 𝑦) вдоль траекторий системы (3.1), (3.3),
(5.1) удовлетворяет неравенству
(5.15)
√
√
𝑑
𝑉 (𝑥(𝑡), 𝑦(𝑡)) ⩽ −𝑞𝑘 𝑉 (𝑥(𝑡), 𝑦(𝑡)) ⩽ −𝑞𝑘min 𝑉 (𝑥(𝑡), 𝑦(𝑡))
𝑑𝑡
почти при всех 𝑡, где 𝑞 = 1 − 6𝐶/𝛾 и
√
¯
𝛾∣ 𝛽 2 + 2𝛾𝛿 − 𝑘∣
𝑘min := min(𝑘) = min √
;
𝛿∈{−1,1} ∣ 𝛽 2 + 2𝛾𝛿 + 𝛽𝛿∣
3) время сходимости имеет оценку
𝑡𝑟𝑒𝑎𝑐ℎ ⩽
2 √
𝑉 (𝑥(0), 𝑦(0)).
𝑞𝑘min
5.5. Численный пример для “вложенного” контроллера
Пусть 𝛼 = 2,8, 𝛽 = 2,5, 𝐶 = 0,2, тогда можно выбрать 𝑘 = 1,4983. Линии уровня функции 𝑉 (𝑥, 𝑦) вида (5.13) с указанными параметрами представлены на рис. 5.
Численное моделирование переходного (рис. 6) процесса для 𝑓 (𝑡, 𝑥, 𝑦) = −𝐶 показало сходимость решения системы (3.1), (3.3), (5.1) из точки (3, −1) в начало координат
𝑒𝑠𝑡
за время 𝑡𝑒𝑥
𝑟𝑒𝑎𝑐ℎ = 2,72, оценка методом функции Ляпунова равна 𝑡𝑟𝑒𝑎𝑐ℎ ⩽ 5,45.
6. Заключение
В данной работе предложен метод построения функций Ляпунова для анализа
конечной сходимости в системах со скользящими режимами высших порядков. Он
основан на использовании метода характеристик для решения уравнения в частных производных специального вида. Несмотря на то, что предложенный подход
61
не предоставляет формального алгоритма построения функции Ляпунова, он позволяет свести эту задачу к проблеме корректного подбора параметров, который
гарантировал бы абсолютную непрерывность и положительную определенность искомой “энергетической” функции. Предложенный метод успешно проиллюстрирован
на примере трех известных алгоритмов скольжения второго порядка.
ПРИЛОЖЕНИЕ
2
2
Д о к а з а т е л ь с т в о л е м м ы 1 . При ∥𝑥∥ + ∥𝑦∥ > 0 имеем 𝑉 (𝑥, 𝑦) > 0 и
𝑑𝑥𝑖 = −𝑔𝑖 (𝑥, 𝑦)
𝑑𝑉
,
𝑞𝑉 𝜌
𝑑𝑦𝑗 = −ℎ𝑗 (𝑥, 𝑦, 𝛾𝑖 )
𝑑𝑉
.
𝑞𝑉 𝜌
Тогда из
⎡
⎤
𝑘
𝑛
𝑘
𝑛
∑
∑
∑
∑
∂𝑉
∂𝑉
∂𝑉
∂𝑉
𝑑𝑉
𝑑𝑉 =
𝑑𝑥𝑖 +
𝑑𝑦𝑗 = − ⎣
𝑔𝑖 (𝑥, 𝑦) +
ℎ𝑗 (𝑥, 𝑦, 𝛾𝑖 )⎦
𝜌
∂𝑥
∂𝑦
∂𝑥
∂𝑦
𝑞𝑉
𝑖
𝑗
𝑖
𝑗
𝑖=1
𝑗=1
𝑖=1
𝑗=1
очевидно вытекает (2.5).
Доказательство леммы 2.
1. Рассмотрим случай 𝑥𝑦 > 0. Тогда необходимо проверить следующее
[
] неравен)−1
(
)−1/2
(√
∂𝑉
2
2𝛾+ 𝑘¯ − 1
> − 1 + 2𝛾+ ∣𝑥∣/𝑦
с 𝛾+ = 𝑟1 + 𝑟1 + 𝐶 sign 𝑥
ство
, которое
∂𝑦
−1/2
−1/2
напрямую следует из цепочки неравенств 𝑘¯ > (2(𝑟1 + 𝑟2 − 𝐶))
⩾ (2𝛾+ )
.
(
)−1
√
2. При 𝑥𝑦 < 0 нужно показать, что справедливо
неравенство 1 − 2𝛾− 𝑘¯
>
[
]
(
)
∂𝑉
−1/2
> 1 + 2𝛾− ∣𝑥∣/𝑦 2
с 𝛾− = 𝑟1 −𝑟1 +𝐶 sign 𝑥
, которое вытекает из неравенства
∂𝑦
0 < 𝑘¯ < (2(𝑟1 − 𝑟2 + 𝐶))−1/2 ⩽ (2𝛾− )−1/2 .
√
√
√
3. Поскольку 2𝛾+ 𝑘¯ − 1 > 0 и 2𝛾− 𝑘¯ − 1 < 0, то имеем sign [𝑥𝑦] = sign [ 2𝛾 𝑘¯ − 1]
и 𝑘0 > 0 при всех 𝑥𝑦 ∕= 0.
Доказательство теоремы 1.
1. Очевидно, что функция 𝑉 (𝑥, 𝑦) может иметь разрывы только на прямых 𝑥 = 0
и 𝑦 = 0. Параметры 𝑘 и 𝑘0 (4.19) выбраны так, чтобы ликвидировать разрывы на
этих прямых, следовательно функция 𝑉 (𝑥, 𝑦) непрерывна по построению.
2. Частные производные функции 𝑉 (𝑥, 𝑦) имеют вид:
∂𝑉
𝑘2
=
∂𝑥
2
(
∂𝑉
𝑘2
=
∂𝑦
2
(
𝑘0
𝑘 2 sign [𝑥]
√
√ + 0
2
1 + 2𝛾 ∣𝑥∣ /𝑦 2 2𝛾
1
)
𝑦
𝑘0 𝑦 2
𝑘0 sign [𝑥](𝑦 2 + 𝛾∣𝑥∣)
√
+
+
2
𝛾
2𝛾
𝛾 2 ∣𝑥∣ + 𝑦 2 /(2𝛾)
,
)
.
∂𝑉
Поскольку 𝛾, 𝑘 и 𝑘0 переключаются только на прямых 𝑥 = 0 и 𝑦 = 0, то
и
∂𝑥
∂𝑉
– непрерывны для 𝑥 ∕= 0 и 𝑦 ∕= 0. Более того, правые и левые пределы частных
∂𝑦
производных на этих прямых конечны в любой ограниченной области.
62
3. Рассмотрим полную производную функции 𝑉 (𝑥, 𝑦) вдоль траекторий системы
(3.1):
(
√
(
))
√
𝑑𝑉
𝛾¯
𝛾 𝑘0 sign [𝑥𝑦]
𝛾¯
√
=𝑘 𝑉 − +
,
1−
𝑑𝑡
𝛾
2 1 + 2𝛾∣𝑥∣/𝑦 2
𝛾
где 𝛾¯ = 𝑟1 +𝑟2 sign [𝑥𝑦]−𝑓 (𝑡, 𝑥, 𝑦) sign [𝑥], 𝛾 = 𝑟1 +𝑟2 sign [𝑥𝑦]−𝐶 sign [𝑥𝑦] (см. (4.25)).
𝛾¯
𝛾¯
для 𝑥𝑦 > 0 и 1 ⩾ ⩾ (𝑟1 − 𝑟2 − 𝐶)/(𝑟1 − 𝑟2 + 𝐶) для 𝑥𝑦 < 0, то
Поскольку 1 ⩽
𝛾
𝛾
неравенство
√
(
)
𝛾¯
𝛾 𝑘0 sign [𝑥𝑦]
𝛾¯
𝑟1 − 𝑟2 − 𝐶
√
− +
⩽−
1−
2
𝛾
2 1 + 2𝛾∣𝑥∣/𝑦
𝛾
𝑟1 − 𝑟2 + 𝐶
𝑑𝑉
𝑟1 − 𝑟2 − 𝐶 √
⩽ −𝑘min
𝑉 для 𝑥𝑦 ∕= 0.
𝑑𝑡
𝑟1 − 𝑟2 + 𝐶
4. Для окончания доказательства остается отметить, что система (3.1)–(3.3) не
имеет нетривиального решения с 𝑥(𝑡) ≡ 0 или 𝑦(𝑡) ≡ 0, другими словами, траектории системы пересекают линии переключений, избегая движения вдоль этих
линий [7]). Поэтому неравенство (3.16) выполнено почти всюду вдоль траекторий
системы (3.1)–(3.3).
Д о к а з а т е л ь с т в о л е м м ы 3 . Для доказательства справедливости соотношения
)2
(√
)
(√
𝑠(𝑥, 𝑦) = 2𝛾
∣𝑥∣ sign [𝑥] − 𝛼
∣𝑥∣ sign [𝑥] 𝑦 + 𝑦 2 > 0 для 𝑥2 + 𝑦 2 ∕= 0
выполнено. Таким образом, получили
можно воспользоваться критерием Сильвестра для квадратичных форм. Из условия
𝑔 = 8𝛾/𝛼2 > 1 следует, что соответствующая матрица квадратичной формы имеет
положительные последовательные главные миноры.
Доказательство леммы 4.
1. При 𝑥𝑦 > 0 имеем
[
(
)
(
(
))]−1
√
𝜋
1
1
√
𝑘0 = 𝛾 −1 𝑘¯ 𝑔 exp
− exp − √
arctg √
2 𝑔−1
𝑔−1
𝑔−1
)
(
√
и из (4.21) следует, что 𝑘0 > 0 > −𝑦 sign [𝑥]/ 𝛾𝑒𝑚(𝑥,𝑦) 𝑠(𝑥, 𝑦) .
2. В случае 𝑥𝑦 < 0 нужно доказать, что
(
(
))
]−1
1
1
√ − 2√𝜋𝑔−1
¯
𝑘0 = 𝛾
exp − √
arctg √
− 𝑘 𝑔𝑒
>
𝑔−1
𝑔−1
(
)
√
> ∣𝑦∣ / 𝛾𝑒𝑚(𝑥,𝑦) 𝑠(𝑥, 𝑦) .
−1
[
Рассмотрим скалярную функцию
𝑓 (𝑝) = 𝑒
√1
𝑔−1
(
)
1
arctg 2√𝛼𝑔
𝑝+ √𝑔−1
𝑔−1
производная которой при 𝑝 ⩾ 0
𝑓 ′ (𝑝) = −2𝛾𝑝𝑒
√1
𝑔−1
/
√
2𝛾𝑝2 + 𝛼𝑝 + 1,
(
)
1
arctg 2√𝛼𝑔
𝑝+ √𝑔−1
𝑔−1
(
)3/2
/ 2𝛾𝑝2 + 𝛼𝑝 + 1
⩽ 0.
63
Поскольку
(
)
(√
)
(
)
√
1
√1
arctg √𝑔−1
𝑚(𝑥,𝑦)
𝑔−1
𝑓
/𝛾,
∣𝑥∣/ ∣𝑦∣ /𝛾 = ∣𝑦∣ / 𝛾𝑒
𝑠(𝑥, 𝑦) ⩽ 𝑓 (0)/𝛾 = 𝑒
то из (4.21) получаем
(
(
))
(
)
√
1
1
−1
𝑘0 > 𝛾 exp √
arctg √
⩾ ∣𝑦∣ / 𝛾𝑒𝑚(𝑥,𝑦) 𝑠(𝑥, 𝑦) .
𝑔−1
𝑔−1
Доказательство леммы 5.
функции 𝑉 (𝑥, 𝑦) по 𝑦 имеет вид
В условиях леммы 4 частная производная
)
√
√
√ (
∂𝑉
= 𝑘 𝑉 sign [𝑥]/𝛾 + 𝑘0 (𝑦 − 𝛼 ∣𝑥∣ sign [𝑥])𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦)
∂𝑦
[
]
√
√
и нужно показать, что sign 1 + 𝛾𝑘0 (𝑦 sign [𝑥] − 𝛼 ∣𝑥∣)𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦) = sign [𝑥𝑦].
1. Рассмотрим функцию
(
(
)) √
1
𝛼𝑔
1
−1
√
𝑓1 (𝑝) = (𝑝 − 𝛼) exp √
arctg
𝑝 −√
/ 2𝛾 − 𝛼𝑝 + 𝑝2 ,
𝑔−1
2 𝑔−1
𝑔−1
производная которой при 𝑝 ⩾ 0
(
(
))
(
)3/2
1
𝛼𝑔
1
𝑓1′ (𝑝) = 2𝛾 exp √
arctg √
𝑝−1 − √
/ 2𝛾 − 𝛼𝑝 + 𝑝2
> 0.
𝑔−1
2 𝑔−1
𝑔−1
(
) √
√
√
√
Тогда 𝑓1 (∣𝑦∣ / ∣𝑥∣) = (∣𝑦∣ − 𝛼 ∣𝑥∣)𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦) ⩾ 𝑓1 (0) = −2 exp 2√𝜋𝑔−1 / 𝑔, и
√
√
из (4.20), (4.23) вытекает, что 1 + 𝛾𝑘0 (∣𝑦∣ − 𝛼 ∣𝑥∣)𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦) > 0 при 𝑥𝑦 > 0.
2. Для функции
(
(
)) √
1
𝛼𝑔
1
𝑓2 (𝑝) = (𝑝 + 𝛼) exp − √
arctg √
𝑝−1 + √
/ 2𝛾 + 𝛼𝑝 + 𝑝2
𝑔−1
2 𝑔−1
𝑔−1
при 𝑝 ⩾ 0 имеем
(
))
(
(
)3/2
𝛼𝑔
1
1
−1
= 2𝛾 exp − √
arctg √
𝑝 +√
/ 2𝛾 + 𝛼𝑝 + 𝑝2
> 0.
𝑔−1
2 𝑔−1
𝑔−1
(
) √
√
√
√
Тогда 𝑓2 (∣𝑦∣ / ∣𝑥∣) = (∣𝑦∣ + 𝛼 ∣𝑥∣)𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦) ⩾ 𝑓2 (0) = 2 exp − 2√𝜋𝑔−1 / 𝑔, и
√
√
из (4.20), (4.21), (4.23) получаем, что 1 − 𝛾𝑘0 (∣𝑦∣ + 𝛼 ∣𝑥∣)𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦) < 0 при
𝑥𝑦 < 0.
Доказательство леммы 6.
1. Сначала покажем, что
(
(
(
)))
𝑥
𝜋
𝑥
𝑓1 (𝑥) = exp − √
+ arctg √
+ 𝑥/(𝑥 + 1) < 1
2𝑥 + 1 2
2𝑥 + 1
( √
)
√
для всех 𝑥 ∈ (0, +∞), т.е. ln(1 + 𝑥) 2𝑥 + 1/𝑥 < 𝜋/2 + arctg 𝑥/ 2𝑥 + 1 :
√
√
( √
)
√
а) при 𝑥 ⩾ 1 имеем ln(1 + 𝑥) 2 + 1/𝑥/ 𝑥 ⩽ 3 < 𝜋/2 + arctg 𝑥/ 2𝑥 + 1 . Здесь
√
использовано неравенство 1 + 𝑥 < exp ( 𝑥) при 𝑥 ⩾ 1;
𝑓2′ (𝑝)
64
( √
)
√
б) для 0 < 𝑥(< 1 получаем,
) что ln(1+𝑥) 2𝑥 + 1/𝑥 < 𝜋/2 < 𝜋/2+arctg 𝑥/ 2𝑥 + 1
𝜋
𝑥
√
.
из 1 + 𝑥 < exp
2 2𝑥 + 1
√
2. Теперь рассмотрим функцию 𝑓2 (𝑦) = exp (𝑦 (𝜋/2 − arctg (𝑦))) − 𝑦/ 1 + 𝑦 2 и
покажем, что 𝑓2 (𝑦) > 1 при всех 𝑦 ∈ (0, +∞), т.е.
(
)
√
𝜋/2 > arctg (𝑦) + 𝑦 −1 ln 1 + 𝑦/ 1 + 𝑦 2 .
Используя правило Лопиталя, легко получаем, что
(
(
))
√
lim arctg (𝑦) + 𝑦 −1 ln 1 + 𝑦/ 1 + 𝑦 2
= 1,
𝑦→+0
lim
𝑦→+∞
(
(
))
√
arctg (𝑦) + 𝑦 −1 ln 1 + 𝑦/ 1 + 𝑦 2
= 𝜋/2.
Таким образом, достаточно проверить строгую монотонность выражения под знаком
предела при 𝑦 > 0, которая следует из неравенства
(
(
))′
√
arctg (𝑦) + 𝑦 −1 ln 1 + 𝑦/ 1 + 𝑦 2
=
)−1
(
)
(√
√
𝑦2 + 1 + 𝑦
(𝑦 2 + 1)−1 − 𝑦 −2 ln 1 + 𝑦/ 1 + 𝑦 2 =
= 1/(𝑦 2 + 1) + 𝑦 −1
(
))
( √
√
= 𝑦/ 𝑦 2 + 1 − ln 1 + 𝑦/ 1 + 𝑦 2 /𝑦 2 > 0.
3. Показано, что 𝑓1 (𝑥) < 1 < 𝑓2 (𝑦) при всех 𝑥, 𝑦 > 0. Тогда при 𝑔 > 1 имеем:
(
))
( √
(
)
−𝜋/2 − arctg 1/ 𝑔 − 1
1
1
√
𝑓1 √
= √ + exp
,
𝑔−1
𝑔
𝑔−1
(
( √
))
)
(
𝜋/2 − arctg 1/ 𝑔 − 1
1
1
√
= exp
−√ ,
𝑓2 √
𝑔
𝑔−1
𝑔−1
откуда вытекает, что интервал 𝐼(𝑔) непустой.
Доказательство теоремы 2.
1. В силу лемм 3–6 и специального подбора параметров 𝑘, 𝑘0 и 𝑘¯ построена функция 𝑉 (𝑥, 𝑦), которая является положительно определенной и непрерывной во всем
пространстве ℝ2 .
2. Частные производные 𝑉 (𝑥, 𝑦) при 𝑥𝑦 ∕= 0 имеют вид:
)
(
√
√
∂𝑉
𝑘 2 𝑦 sign [𝑥]
𝑚(𝑥,𝑦)
𝑠(𝑥, 𝑦) 𝑘0 𝛾 sign [𝑥]𝑒𝑚(𝑥,𝑦) / 𝑠(𝑥, 𝑦),
=
+ 𝑘0 𝑒
∂𝑥
2
𝛾
)
√
(
)(
√
∂𝑉
𝑘 2 𝑦 sign [𝑥]
sign [𝑥] 𝑘0 (𝑦 − 𝛼 ∣𝑥∣ sign [𝑥])𝑒𝑚(𝑥,𝑦)
𝑚(𝑥,𝑦)
√
=
+ 𝑘0 𝑒
𝑠(𝑥, 𝑦)
+
.
∂𝑦
2
𝛾
𝛾
𝑠(𝑥, 𝑦)
∂𝑉
Поскольку 𝛾, 𝑘 и 𝑘0 переключаются только на прямых 𝑥 = 0 и 𝑦 = 0, то
и
∂𝑥
∂𝑉
– непрерывны для всех 𝑥𝑦 ∕= 0. Очевидно также, что левые и правые пределы
∂𝑦
частных производных на этих прямых конечны в любой ограниченной области.
3 Автоматика и телемеханика, № 5
65
3. Рассмотрим полную производную 𝑉 (𝑥, 𝑦) вдоль траекторий системы (4.6)
) ∂𝑉
√
𝑑𝑉
∂𝑉
∂𝑉
∂𝑉 (
=
𝑥˙ +
𝑦˙ =
𝑦 − 𝛼 ∣𝑥∣ sign [𝑥] +
(𝜑˙ − 𝛽 sign [𝑥]) .
𝑑𝑡
∂𝑥
∂𝑦
∂𝑥
∂𝑦
Из леммы 5 и условия на параметр 𝑘¯ следует, что
[
]
∂𝑉 ∂𝑉
∂𝑉
∂𝑉
∂𝑉
∣𝜑∣
𝜑˙ ⩽ ˙
⩽
sign
𝐿=
sign [𝑦]𝐿
∂𝑦
∂𝑦
∂𝑦
∂𝑦
∂𝑦
и
√
𝑑𝑉
⩽ −𝑘 𝑉 .
𝑑𝑡
Заметим, что 𝑘 > 0 зависит от sign [𝑥𝑦] и принимает различные значения при
𝑥𝑦 > 0 и 𝑥𝑦 < 0. Поэтому для получения оценки времени сходимости удобнее использовать число 𝑘min = min{𝑘} > 0.
4. Наконец, для того чтобы завершить доказательство, достаточно отметить, что
траектории системы (4.6) пересекают линии переключений 𝑥 = 0 и 𝑦 = 0, избегая движения вдоль этих линий (для доказательства этого факта достаточно просто предположить противное). Следовательно, неравенство (4.28) выполнено почти
всюду вдоль траекторий системы (4.6).
Доказательство леммы 7.
1. Для начала отметим, что 𝑔 − < 𝑔 + и из 𝛽 > 5𝐿 и 32𝐿 < 𝛼2 следует, что 𝑔 + <
< 𝑔 − + 0,25.
2. При 𝑔 > 1 функции
𝑓1 (𝑔) = 2/𝑔 + 𝑒
1
− √𝑔−1
(
(
𝜋
2 +arctg
√1
𝑔−1
))
√
/ 𝑔
и
𝑓2 (𝑔) = 𝑒
√1
𝑔−1
(
(
𝜋
2 −arctg
√1
𝑔−1
))
√
/ 𝑔
являются монотонно убывающими, поскольку
(
(
(
)))⎛
(
)
⎞
1
𝜋
𝜋
1
1
√
exp − √
+ arctg √
+
arctg
⎜
2−𝑔 ⎟
𝑔−1 2
𝑔−1
𝑔−1
⎜2 √
⎟ − 2 < 0,
𝑓1′ (𝑔) =
+ 3/2
⎝
3/2
2
𝑔 (𝑔 − 1) ⎠ 𝑔 2
𝑔 (𝑔 − 1)
(
(
(
(
))) ⎛
)
⎞
1
𝜋
1
𝜋
1
√
exp √
− arctg √
−
arctg
⎜ 2
2−𝑔 ⎟
𝑔−1 2
𝑔−1
𝑔−1
⎜−
⎟ < 0.
𝑓2′ (𝑔) =
+ 3/2
√
⎝
2
𝑔 (𝑔 − 1) ⎠
𝑔 (𝑔 − 1)3/2
+
3. Очевидно, 𝐼(𝑔) = (𝑓1 (𝑔), 𝑓2 (𝑔)). Поэтому 𝐼(𝑔 − ) ∩ 𝐼(𝑔
√ ) ∕= ∅ только в случае
−
−
+
𝑓1 (𝑔 ) < 𝑓2 (𝑔 + 0,25) √
< 𝑓2 (𝑔 ). В лемме 6 доказано, что 𝑔 − (𝑓1 (𝑔 − ) − 1/𝑔 − ) < 1.
Наконец, неравенство 𝑔 − (𝑓2 (𝑔 − + 0,25) − 1/𝑔 − ) > 1 завершает доказательство.
Доказательство леммы 8.
1. Для 𝑥𝑦 > 0 выполнено sign [𝑥𝑧] = sign [𝑦𝑧] = 1, значит 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾) > 0.
√
2. Для 𝑥𝑦 < 0 имеем sign [𝑥𝑧] = −sign [𝑦𝑧] = sign [𝛽 ∣𝑥∣ − ∣𝑦∣] :
√
a) при 𝛽 ∣𝑥∣ − ∣𝑦∣ < 0 получаем 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾) ⩾ ∣𝑥∣(𝛽 2 /(2𝛾) − 1) > 0;
√
б) при 𝛽 ∣𝑥∣ − ∣𝑦∣ > 0 получаем 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾) = ∣𝑥∣ + 𝑦 2 /(2𝛾) > 0.
√
3. Если 𝑦 = 0, то 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾) = 𝑥 sign [𝛽 ∣𝑥∣ sign (𝑥)] = ∣𝑥∣ ⩾ 0.
66
Доказательство леммы 9.
1. Для 𝑥𝑦 > 0 неравенство (5.9) следует из sign [𝑦𝑧] = sign [𝑥𝑧] = 1.
2. Для 𝑥𝑦 < 0 имеем sign [𝑥𝑧] = −sign [𝑦𝑧]:
a) при 𝑥𝑧 < 0 неравенство (5.9) вытекает из 𝑘0 > 0;
√
√
√
¯
2/𝛾(𝛽 + 𝑘)
2/𝛾
2/𝛾 sign [𝑥𝑧]
б) при 𝑥𝑧 > 0 имеем 𝑘0 = √
> √
⩾√
.
2
2
¯
1
+
2𝛾/𝛽
1
+
2𝛾∣𝑥∣
sign [𝑥𝑧]/𝑦 2
𝛽 + 2𝛾 − 𝑘
3. Для 𝑦 = 0, 𝑥 ∕= 0 имеем sign [𝑥𝑧] = 1 и правая часть (5.9) равна нулю.
Доказательство теоремы 3.
1. Функция 𝑉 (𝑥, 𝑦) непрерывна по построению в силу специального выбора параметров 𝑘 и 𝑘0 .
2. Частные производные 𝑉 (𝑥, 𝑦) имеют вид:
(
)
∂𝑉
𝑘02 sign [𝑧]
𝑘2
𝑘0 𝑦
√
=
+
,
∂𝑥
2 2𝛾 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾)
2
(
)
∂𝑉
𝑘2 𝑦
𝑘02 𝑦
𝑘0 (𝑦 2 sign [𝑧] + 𝛾𝑥)
=
+
+ √
.
∂𝑦
2 𝛾2
2𝛾
𝛾 2 𝑥 sign [𝑧] + 𝑦 2 /(2𝛾)
Их непрерывность при 𝑥𝑧 ∕= 0 очевидно следует из вида параметров 𝑘 и 𝑘0 .
3. Полная производная функции 𝑉 (𝑥, 𝑦), в силу системы (3.1), имеет оценку
(
(
))
√
𝑑𝑉
𝛾¯
𝑘0 ∣𝑦∣ sign [𝑦𝑧]
𝛾¯
⩽𝑘 𝑉 − + √
1−
,
𝑑𝑡
𝛾
𝛾
2 𝑦 2 /(2𝛾) + ∣𝑥∣ sign [𝑥𝑧]
[
]
∂𝑉
где 𝛾¯ = 𝛼−𝐶 sign 𝑧
, 𝛾 = 𝛼−𝐶 (см. (4.25)). Поскольку при всех 𝑥, 𝑦 справедливо
∂𝑦
𝛾¯
1 ⩽ , то при 𝑦𝑧 > 0 имеем неравенство
𝛾
√
(
)
𝛾¯
𝛾
𝑘0 sign [𝑦𝑧]
𝛾¯
√
− +
(Π.1)
1−
⩽ −𝑞.
𝛾
2 1 + 2𝛾∣𝑥∣/𝑦 2 sign [𝑥𝑧]
𝛾
√
√
𝛾
При 𝑦𝑧 < 0 получаем sign [𝑥𝑧] = 1 и 0 ⩽
𝑘0 / 1 + 2𝛾/𝛽 2 < 4, а следовательно,
2
√
𝑑𝑉
(Π.1) справедливо и в этом случае. Таким образом, имеем
⩽ −𝑘 𝑉 для 𝑥𝑧 ∕= 0.
𝑑𝑡
4. Завершает доказательство тот факт, что траектории системы (3.1), (5.1) при
условии 2(𝛼 + 𝐶) < 𝛽 2 пересекают линии переключений 𝑥 = 0 и 𝑧 = 0, избегая
движения вдоль этих (для доказательства достаточно просто предположить противное, см. [13]). Следовательно, неравенство (5.15) выполнено почти всюду вдоль
траекторий системы (3.1), (5.1).
СПИСОК ЛИТЕРАТУРЫ
1. Филиппов А.Ф. Дифференциальные уравнения с разрывной правой частью. М.: Наука,
1985.
2. Уткин В.И. Скользящие режимы в задачах оптимизации и управления. М.: Наука,
1981.
3. Levant A. Sliding order and sliding accuracy in sliding mode control // Int. J. Control. 1993.
V. 58. No. 6. P. 1247–1263.
3∗
67
4. Edwards C., Spergeon S. Sliding mode control: theory and applications. Taylor&Francis,
1998.
5. Utkin V.I., Guldner J., Shi J. Sliding Modes in Electromechanical Systems. Taylor&Francis,
London, 1999.
6. Емельянов С.В., Коровин С.К., Левантовский Л.В. Новый класс алгоритмов скольжения второго порядка // Вычислительные алгоритмы и методы. 1990. Т. 2. № 3.
С. 89–100.
7. Orlov Y. Extended Invariance Principle and Other Analysis Tools for Variable Structure
Systems // Advances in Variable Structure and Sliding Mode Control (ed. C. Edwards,
E.F. Colet, L. Fridman). Springer, Berlin-Heidelberg-New York, 2006. P. 3–22.
8. Bacciotti A., Rosier L. Liapunov functions and stability in control theory // Lecture notes
in control and information sciences (V. 267). New York: Springer, 2001.
9. Orlov Y. Finite Time Stability and Robust Control Synthesis of Uncertain Switched Systems // SIAM J. Control Optimization. 2005. V. 43. No. 4. P. 1253–1271.
10. Shtessel Y.B., Shkolnikov I.A., Levant A. Smooth second-order sliding modes: Missile guidance application // Automatica. 2007. V. 43. No. 8. P. 1470–1476.
11. Зубов В.И. Устойчивость движения (методы Ляпунова и их применение). М.: Высш.
шк., 1984.
12. Эльсгольц Л.Э. Дифференциальные уравнения и вариационное исчисление. М.: Наука,
1965.
13. Levant A. Principles of 2-sliding mode design // Automatica. 2007. V. 43. No. 4. P. 576–586.
14. Polyakov A., Poznyak A. Lyapunov Function Design for Finite-Time Convergence Analysis:
“Twisting” Controller for Second Order Sliding Mode Realization // Automatica. 2009.
V. 45. P. 444–448.
15. Polyakov A., Poznyak A. Reaching Time Estimation for “Super-Twisting” Second Order
Sliding Mode Controller via Lyapunov Function Designing // IEEE Trans. Automatic Control. 2009. V. 54. No. 8. P. 1951–1955.
Статья представлена к публикации членом редколлегии Б.Т. Поляком.
Поступила в редакцию 18.04.2008
68