Резервы управляемости колесной машины в конструктивных
advertisement

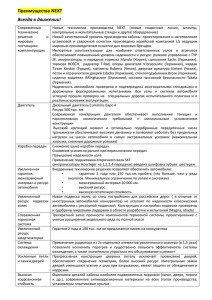
Нгуен Тхе Мань (аспирант), И. В. Ходес (д. т. н., профессор), О. Б. Ригин (студент), РЕЗЕРВЫ УПРАВЛЯЕМОСТИ КОЛЕСНОЙ МАШИНЫ В КОНСТРУКТИВНЫХ РЕШЕНИЯХ ХОДОВОЙ СИСТЕМЫ Волгоград, Волгоградский государственный технический университет Движение колесной машины (КМ) на больших скоростях является наиболее частой причиной ДТП из-за потери управляемости, как при корректировке прямолинейного курсового направления, так и в режиме прохождения поворота. Усугубляется это тем, что КМ неадекватно реагирует на управляющее действие даже опытного Возникающие при повороте боковые силы существенно водителя. искажают задаваемый радиус поворота из-за увода эластичных опорных колес, деформации податливых звеньев подвески, рулевого привода, остова с образованием угла крена. Средняя величина однонаправленного увода опорных осей вызывает боковое смещение. Неодинаковое смещение передней и задней осей изменяют кривизну траектории и опять же искажают боковое смещение и курсовое направление. Подобные явления имеют место также из-за доворотов колес осей от деформации подвески, содержащей задержки демпферные реакции КМ устройства, и, с проявлением дополнительно, из-за технической остаточной несогласованности по углам установки «развала-схождения» колес каждой оси. Искажение радиуса поворота вызывает необходимость его корректировки подруливанием. При большой скорости прохождения 1 поворота это вызывает непредсказуемое изменение курсового направления и бокового ускорения, в сочетании с неточностью реакции водителя (особенно малоопытных или утомленных длительным непрерывным движением) – обуславливает повышенную опасность, так как востребованное время реакции становится меньше, а боковые ускорения растут пропорционально квадрату скорости. Выполненный ранее анализ причин, составляющих искажение траектории [1, 2, 3], показал, что наилучшее качество управляемости достигается, если суммарные искажения компенсируют друг друга во время всего периода отклонения управляемых колес. К сожалению, конструктор ограничен в возможности уменьшения шинного увода даже при реализации нейтральной поворачиваемости, так как одинаковый однонаправленный увод осей не исключает смещение по другим причинам, включая боковой воздушный поток, поперечный наклон полотна дороги. Поэтому в арсенале конструктора остается лишь возможность организовать обратный доворот от разнонаправленной деформации подвески на внешних и внутренних опорах (относительно центра поворота) от центробежной силы. При этом же следует учитывать, что благоприятный для управляемости доворот, окажется неблагоприятным, дестабилизирующим при прямолинейном движении и других причинах появления боковых сил (боковой воздушный поток, поперечный наклон полотна дороги) за счет той же разнонаправленной деформации. Кроме того, при движении по неровностям, вызывающим однонаправленную деформацию подвески, эти же явления нарушат согласование углов установки колес по «развалу-схождению», что вызовет дестабилизацию и «рысканье» машины. В связи с этим целесообразно предусмотреть конструктивные мероприятия, которые позволили бы полностью компенсировать практически неустранимый шинный увод, проявляемый в поперечном 2 смещении машины, даже при равных углах увода передней и задней осей. При этом можно воспользоваться техническими решениями [3], для независимой стоечной подвески с ведущими и управляемыми колесами и, в виде колесного модуля для управляемых и неуправляемых колес, при любой типе подвеске пассивной ведомой осью. Заметим, что эту же функцию способна выполнять подвеска при наличии реактивных штанг, используемых для кинематической и силовой связи остова с ведущим мостом, выполняющим одновременно функцию оси опорных колес. Ниже приводится краткое описание упомянутых технических решений и для примера даны основные расчетные соотношения, позволяющие выполнить определение их параметров в зависимости от коэффициента сопротивления увода опорных колес на оси транспортного средства. δ1 δ2 l l Рис. 1 Рис.2 Технический результат достигается тем, что в колесном модуле (рис. 1, 2) транспортного средства [3], содержащем, ведомые, в том числе, управляемые колеса, установленные на жесткой балке или на цапфах, между поворотным кулаком 3 и цапфой, установлен упругий компенсатор 4 увода шины, подвижный в поперечном направлении, выполненный в виде упругой пластины, жестко связанной одним концом с осью цапфы, а другим - с поворотным кулаком при сохранении взаимного расположения 3 оси кулака с осью цапфы. За счет упругого компенсатора увода под действием горизонтальной поперечной силы F обеспечивается доворот колеса с поворотной цапфой в поперечной плоскости в сторону, обратную направлению увода на такой же угол, что компенсирует увод и улучшает стабилизацию прямолинейного движения колесной машины. Подобным образом осуществляется связь жесткой балки с осью колеса. Происходит непосредственная автоматическая компенсация бокового увода, что улучшает стабилизацию прямолинейного движения и ее управляемость. Для компенсации бокового увода δ1 от поперечной силы F при коэффициенте увода K ó и обеспечения прочности компенсатора 4 в виде пластины с линейными размерами l , b, h должны соблюдаться условия: l [σ ] , l2 E = и = bh3 6 K ó bh 2 6 F где Е – модуль Юнга материала пластины (Н/м2), [σ ] – предел прочности материала (Па) с возможным принятием соотношения толщины и ширины пластины, например, h 1 = = 0, 05 . b 20 Жесткость упругой пластины выбирается такой, чтобы момент, создаваемый горизонтальной поперечной силой F на плече, равном длине l упругого компенсатора, вызывал поворот колеса 1 с цапфой 2 на угол δ 2 , равный и обратный углу увода δ1 . Таким образом, должны выполняться условия: δ1 = δ 2 , жесткость компенсатора согласно выражения C = K y l , где K y – коэффициент увода (Н/рад), l – длина пластины (м). Чтобы поворот плоскости колеса под действием силы F из-за наличия компенсатора происходил в сторону, обратную направлению увода, точку пересечения оси поворота колеса с опорной поверхностью следует расположить позади вертикальной оси по направлению движения машины. Таким образом, обеспечивается автоматическая компенсация 4 увода и стабилизация задаваемого направления движения колесной машины, при поперечной силе F, возникающей по любой причине (криволинейное движение, боковой воздушный поток, геометрический наклон полотна дороги и т.д.), тем самым, качество управляемости, т.е. точности воспроизведения задаваемого направления и траектории движения. В схеме подвески [4] передних управляемых колес, содержащей амортизационную стойку с рессорой, упругий элемент вводится в виде полукруглой пластины непостоянного сечения по высоте. С одной стороны он связан жестко с поворотной цапфой, а с другой с амортизационной стойкой. Пересечение оси поворота колеса с опорной поверхностью так же располагается позади вертикальной оси по направлению движения. За счет упругого элемента, под действием поперечной силы F предполагается поворот колеса с поворотной цапфой в сторону, обратную направлению увода, на такой же угол. Это компенсирует увод и улучшает стабилизацию прямолинейного движения колесной машины, как описано выше. Компенсацию увода колес при зависимой подвеске остова на жесткой балке можно получить и за счет рационального задания координат параметров связи остова с балкой по высоте и расстоянию в продольном направлении, таким образом, чтобы доворот от разнонаправленной деформации подвески на внешней и внутренней сторонах был направлен противоположно уводу. К сожалению, на большинстве транспортных средств имеет место обратный доворот, что несколько компенсирует недостаточную поворачиваемость в заключительной стадии маневрирования, но внутри этого периода усугубляет нестабильность задаваемой траектории. Например, перенос шарнира связи реактивной штанги ВАЗ-2121 на то же расстояние назад, за опорную балку, при согласовании углов увода и доворота мог бы улучшить свойства 5 управляемости подобных моделей. Аналогичные суждения можно бы высказать и по размещению шарниров зависимой подвески с листовыми рессорами. Выводы: 1. При проектировании подвески и рулевого привода следует добиваться взаимной компенсации углов шинного увода и доворота от деформации подвески, вызванной поперечными силами любого происхождения. 2. Кинематика подвески должна поддерживать согласованность увода колес по начальным настройкам «развала-схождения» в зоне вероятных деформаций подвески и изменения позиций опорных колес относительно остова. 3. Рекомендуемые конструктивные решения позволяют улучшить качество управляемости и исключить влияние поперечных сил на искажение курсового направления. Список литературы. 1. Ходес И.В. и др. Формирование управляемости колесной машины при проектирование. «Автомобильная промышленность» №1, 2000 г., с. 19-21. 2. Ходес И.В. и др. Метод потребительской оценки управляемости АТС. «Автомобильная промышленность». №4, 2008 г., с. 30-32. 3. Ходес И.В. и др. Подвески передних управляемых колес автомобиля // Патент №2232683. России. МПК В60G 3/18, 20.07.04 г. 4. Ходес И.В. и др. Колесный модуль транспортного средства // Патент на полезную модель №73277. Россия. МПК В60G 13/00, 09.01.2008г. 6