Выбор способа движения и подготовка участка Подготовка
advertisement

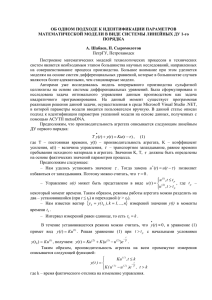
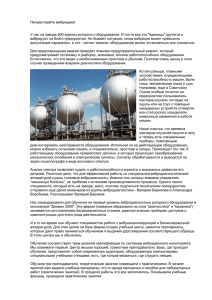
Выбор способа движения и подготовка участка Подготовка участка для работы агрегата заключается в выборе рационального способа движения, разбивке участка на загоны (полосы), отбивке поворотных полос (рис. 1,а). Для повышения производительности агрегатов за счет сокращения холостых ходов (повороты, переезды) загоны желательно располагать так, чтобы они были с наибольшей длиной гона. При нерациональном способе движения соотношение холостых и рабочих ходов может приводить к снижению экономичности работы. Способ движения - порядок циклично повторяющегося перемещения агрегата при выполнении работы. Способы движения агрегатов (МТА) и виды поворотов зависят от выполняемой технологической операции и конструктивных особенностей рабочих машин. Наиболее часто применяемые способы движения МТА представлены на рис. 1. При гоновых способах движения агрегат выполняет рабочие ходы параллельно одной или двум сторонам рабочего участка (загона) с холостыми поворотами на обоих его концах. На прямоугольных участках с гоновым способом движения наибольший эффект достигается при направлении рабочих ходов (гонов) агрегата по длинной стороне загона, что уменьшает число поворотов. Челночный способ (а, б) движения наиболее эффективен для простых одно машинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников, при посевных, лесопосадочных работах и др. Реверсивный способ (в) движения применяется при выполнении механизированных работ в особо сложных условиях (работа на склонах). Диагональный способ (г, д) движения применяется с целью достижения лучшего качества работ при бороновании и культивации, когда рабочие ходы МТА необходимо выполнять под острым или тупым углом к сторонам загона или к направлению обработки почвы. При круговом способе (к) движения рабочие ходы совершаются без выключения рабочих органов вдоль всех сторон рабочего участка. При этом круговые движения могут быть направлены от периферии к центру и наоборот. Рис. 5.1 – Основные способы движения МТА: челночный петлевой (а); челночный беспетлевой (б); реверсивный (в); диагональный (г); диагонально-поперечный (д); круговой (фигурный) (к); комбинированный (фигурный) (л); всвал (м); вразвал (н); чередованием способов всвал и развал (п); с заездом на смежный загон (р); Е — ширина поворотной полосы; R – радиус поворота агрегата; в – ширина захвата агрегата (плуга) Комбинированный способ (л) движения с беспетлевыми поворотами позволяет уменьшить величину поворотных полос и число развальных борозд. Этот способ применяется при частичной широкополосной обработке почвы при производстве лесных культур и в условиях, где нежелательны петлевые повороты, которые увеличивают ширину поворотной полосы. Способы движения всвал (м), вразвал (н), чередованием по загонам (п, р) являются основными при сплошной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках. Основное преимущество способа чередования по загонам с согласованной обработкой трех загонов (п) состоит в уменьшении почти в два раза числа свальных гребней и развальных борозд по сравнению с движением только всвал (м) или вразвал (н). Однако более удобной схемой движения агрегата в питомнике является схема с заездом на смежный загон (р). 1) При проектировании следует начинать с выбора способа движения для агрегата основной операции, зарисовать схему или сделать ссылку на рис. 1. Далее, приняв соответствующую конфигурацию участка в виде правильной фигуры (прямоугольник), по табл. 1 и расчетом определить оптимальную ширину загона (Сопт), при которой обеспечивается наименьшая протяженность холостого хода челночного способа движения: Сопт 2 ( Lуч Bр.х. 8Rа 2 ) , м (5.1) где Lуч – длина рабочего хода (гона), м; Bр.х. – ширина захвата агрегата, м; Rа – минимальный радиус поворота агрегата. Таблица 1. Рекомендуемые параметры загонов Сопт Ширина загона, м, для тракторов тягового класса Длина гона, м 14 кН 30 кН 40 кН 50 кН 60 кН 1000 -1300 70-80 90-100 100-110 120-140 130-150 700 -1000 60-70 80-90 90-100 100-120 115-130 500 - 700 50-60 70-80 80-90 85-110 95-115 400 - 500 45-50 60-70 70-80 70-85 75-95 300 - 400 40-45 50-60 60-70 100 - 300 до 40 - - - - Минимальным радиусом поворота (Rа) агрегата называется наименьший радиус окружности агрегата без деформации движителя и поверхности движения. Пример. Оптимальная ширина загона (Сопт), при которой обеспечивается наименьшая протяженность холостого хода при посеве ленты шириной 1,5 м челночным способом движения в питомнике: Сопт 2 ( Lуч Bр.х. 8Rа 2 ) = 2 (951,5 8 4,52 ) =17,6 м где Lуч = 95 м – длина гона; Bр.х. = 1,5 м – ширина захвата агрегата; Rа = 4,5 м – минимальный радиус поворота трактора МТЗ-82.1. Округлив значение Сопт до целого значения, кратного ширине захвата (Вр.х. = 1,5 м) до 18 м, с учетом выезда агрегата l = 1,5 м (табл. 2) ширина полосы поворота Е составит 6 м. Параметр (l) соответствует длине выезда агрегата до границы разворота и зависит от типа и конструкции орудий. Схемы поворота машинно-тракторного агрегата, представленные на рис. 1 и в табл. 2, позволяют определить ширину поворотной полосы и путь движения агрегата при развороте. Ширина Rа 2,8Rа 2Rа полосы поворота (Е) 6,3Rа+2∙l 14Rа+2∙l 12,4Rа+2∙l (5-8)·Rа+2∙l 8,4Rа+2∙l 6Rа+2∙l π∙Rа+2∙l 6,6Rа+l (1,6–9,2)·Rа+l Длина холостого пути (Sх) 1,6Rа+l Таблица 2. Виды поворота и путь движения агрегатов На 90 На 180 Вид поворота Rа 2,8Rа 3,0Rа 2,9Rа 2Rа 2Rа 1,2Rа При движении агрегата в составе трактора и навесного орудия общая длина холостого хода зависит от ширины захвата орудия (Вр.х.) радиуса поворота (Rа) и длины выезда (въезда) агрегата в конце гона (l). Для навесного агрегата его радиус поворота принимают по трактору Rа = Rт, а длину выезда от контрольной линии поля можно принимать по величине базы трактора. При расчистке площадей, скашивании поросли древесно-кустарниковых пород и стрижке газонов существуют способы движения – обход и челночный (рис. 2). На участке, свободном от препятствий применяется схема (а). Рис. 2. Схемы движения агрегатов при сплошной расчистке или кошении газонов: а – круговой спиралеобразный способ (способ обхода); б – челночный сложный; в или г – комбинированный, с объездом препятствий 2) Далее определяют величину коэффициента рабочего хода φр. х , значение которого может находиться в пределах 0,70-0,95 и необходимо стремиться к его увеличению, чтобы обеспечить правильную и экономичную работу агрегата. 1. Коэффициент рабочих ходов φр.х, в общем виде определяется по формуле: р. х S S S р р , (2) х где Sp – суммарная длина рабочих ходов, м; Sx – суммарная длина холостых ходов, м. 2) Суммарная длина рабочих ходов S р F , Вр. х (3) где F – площадь обрабатываемого участка, м2; Bp.x – расстояние между рабочими ходами, м. 3. Суммарная длина холостых ходов F 1, , уч (4) S х S хi ni S хi L где Sxi – длина холостого хода при i-м повороте, м; ni – количество i-х поворотов (табл. 2); F – площадь участка, м; Lуч – длина рабочего хода (гона), м. 4. При движении агрегата челночным способом коэффициент рабочего хода φр. х подсчитывается по формуле: р. х Lуч Lуч 6 Rа 2 l . (5) 5. При круговом (фигурном) способе движения р. х Lуч Cопт . (6) Bр.х. ( 6 Rа 2 l) ( 2 Rа Bp.х ) Lуч Cопт 2 где Rа – радиус поворота агрегата (трактора), м; l – длина выезда агрегата 6. При беспетлевой вспашке для выполнения основных ходов работы агрегата используют зависимость р. х Lуч Lуч 0,5 ( Сопт Вр.х ) Rа 2 l . (7) 7. Для пахотного агрегата, который может двигаться при работе в питомнике всвал или вразвал коэффициент рабочего хода: р. х Lуч . (8) 4 Rа Lуч 0,5 Cопт ( 2 Rа Вр.х. ) Rа 2 l Cопт 8) Весь комплекс работ по вспашке (обработке) участка в питомнике включает и дополнительные ходы по заравниванию контрольных борозд и опахивание загонов, тогда р. х Lуч Bр.х 2 Bр.х 0,5 Сопт 1 ( Rа 2 l) Вр.х Lуч 1 Сопт Сопт (9) 3) Для учета времени полезной работы агрегата вводится также коэффициент использования сменного времени – Kт. Значение его меняется в основном от длины гона движения агрегата (табл. 3) и в дальнейшем используется для расчетов и уточнения производительности агрегата. Таблица 3 Значение коэффициента использования времени смены, в зависимости от длины гона L Длина гона Lуч, м Kт Длина гона Lуч, м Kт До 150 0,58 401-600 0,83 151-200 0,66 601-1000 0,86 201-300 0,74 более 1000 0,88 301-400 0,80 – –