динамически динамический анализ упругих манипуляторов й
advertisement

ISSN 00020002-306X.
Изв.
Изв. НАН РА и ГИУА.
ГИУА. Сер.
Сер. ТН.
ТН. 2004. Т. LVII, №1.
УДК 621.01
МАШИНОСТРОЕНИЕ
Ю.Л. САРКИСЯН,
САРКИСЯН, К.Г. СТЕПАНЯН,
СТЕПАНЯН, Н. АЗУЗ,
АЗУЗ, Г.А. ГЕВОРКЯН
ДИНАМИЧЕСКИЙ
ДИНАМИЧЕСКИЙ АНАЛИЗ УПРУГИХ МАНИПУЛЯТОРОВ
ОБОБЩ¨
ОБОБЩ¨ННЫМ МЕТОДОМ НЬЮТОНАНЬЮТОНА-ЭЙЛЕРА
На основе обобщ¸нного метода Ньютона-Эйлера разработан алгоритм решения задач
динамического анализа упругих манипуляторов, который позволяет без обращения матрицы
масс численным методом интегрировать уравнения движения манипуляторов. Предлагаемый
алгоритм значительно сокращает затрачиваемое на интегрирование машинное время, что имеет
существенное значение в оптимальном проектировании и управлении робототехнических
систем.
Ключевые
Ключе
вые слова: упругие манипуляторы, динамический анализ, дифференциальные
уравнения движения, численное интегрирование.
1. Введение.
Введение. Приложение метода Ньютона-Эйлера в динамике ж¸стких и
упругих манипуляторов [1 - 6] наряду с обеспечением желаемой точности численных
результатов позволило существенно повысить скорость решения задач динамического
анализа упругих манипуляторов значительной размерности по сравнению с расчет3
ными методиками O(n ) , составленными на базе классического метода Лагранжа [6].
В данной статье описывается алгоритм решения смешанной задачи динамики упругих
манипуляторов, построенный на основе обобщенного метода Ньютона-Эйлера с
представлением нового метода неявного численного интегрирования уравнений
движения в форме Ньютона-Эйлера в соответствии с терминологией и формулировкой работ [2 - 5].
2. Основные положения и постановка задачи.
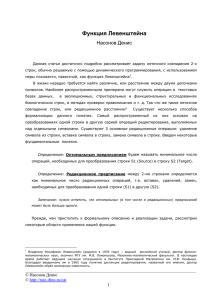
задачи. Рассмотрим манипулятор
произвольной кинематической цепи (рис. 1), состоящий из n линейнодеформируемых звеньев всевозможной геометрической конфигурации C1 , C 2 ,..., C n ,
связанных между собой n вращательными или поступательными кинематическими
парами, идентифицируемыми логической переменной :
0 − ïàðà j âðàùàòåëüíàÿ
σj =
(1)
, j ∈ {1,...,n}.
1 − ïàðà j ïîñòóïàòåëüíàÿ
Ðèñ.1
3
Из теории деформируемого тела известно, что малые линейные и угловые деформации упругого звена C j определяются перемещениями некоторой точки E 0 j ∈ C j
из недеформированной S 0 j в деформированную конфигурацию S j (рис. 1) и исчисляются в ж¸стко связанной со звеном C j подвижной системе отсч¸та Q j на основе
следующих разложений :
r
j u j(E j,t) =
jr
ϕ j(E j,t) =
Nj
r
Φ dj,i (E 0 j) ⋅ q ej,i (t)
∑
j
∑
r
j
Φ rj,i (E 0 j) ⋅ q ej,i (t)
i =1
Nj
, j ∈ {1,...,n}.
(2)
i =1
r
r
Координатные функции Рэлея-Ритца в (2) j Φ dj,i и j Φ rj,i , i = 1,...,N j; j∈ {1,...,n}
( N j - число интерполяционных вектор-полиномов упругого звена C j ) подчинены
векторному равенству
j
r
r r
Φ rj,i(E 0 j) = 1/ 2 ⋅ ro t jΦ dj,i(E 0 j), i = 1,...,N j; j ∈ {1,...,n}
(3)
и образуют в точке A 0 j+1, j ∈ {1,...,n} обобщ¸нную матрицу форм :
j
r
r
r
j Φ dj j Φ dj,1 (A 0 j+1 ), j Φ dj, 2 (A 0 j+1),..., j Φ dj,N j (A 0 j+1 )
, j ∈ {1,...,n}. (4)
= r
Φj = j
r
r
Φ rj j Φ rj,1 (A 0 j+1 ), j Φ rj,2 (A 0 j+1 ),..., j Φ rj,N j (A 0 j+1 )
Дифференциальные уравнения движения упругих звеньев манипулятора
вместе с кинематическими уравнениями, выражающими в дифференцированной форме связи между звеньями кинематической цепи, объединяются в связанную систему
фундаментальных уравнений упругих манипуляторов [5] :
r
j M rrj j M rej &q&rj j Brj ∗ Γj
j
⋅ r e + j r e∗ = j r
j
M erj M eej &q& j B j E j
re
r
,
jr j
j-1
j
j-1
r jr
Vj = Tj-1⋅ Vj-1 + R j-1⋅ Φ j-1 ⋅ q& j-1 + q& j ⋅ a j
r
r
jr j
r
& = T ⋅ j-1 V
& + j R ⋅ j-1 Φ ⋅ &q&e + &q&r ⋅ j ar + j h
V
j
j-1
j-1
j-1
j-1
j-1
j
j
j
j ∈ {1,...,n},
(5)
r
r
где j M rrj , j M rej , j M erj è j M eej - блочные матрицы масс; j B rj ∗ è j B ej ∗ - гироскопические
r
r
силы; Γj - приводные усилия; j E j - известные функции; j Vj - шестимерный вектор
кинематических характеристик звеньев.
4
3. Алгоритм решения смешанной задачи динамики.
динамики. Предлагаемый алгоритм
решения смешанной задачи динамики упругих манипуляторов без обращения
матрицы масс составлен на основе использования процедуры итерационного
символического расч¸та, нашедшего успешное применение в анализе жестких [4] и
упругих [5] манипуляторов. Он включает в себя три последовательно производимых
для каждого момента времени t ∈ [0,T] рекурсивных оборота.
1-й рекурсивный оборот для j=1,...,n
требует вычисления следующих матриц j R j-1 , j T j-1 , j J rrj , j J rej , j J erj , j J eej , векторов
r
r
r r
j r j e j
C j , C j , h j , j a j и постоянной τ j = τ j (Γ j ) ïðè χ j = 0 [5], что позволяет вслед за этим
осуществить кинематический расч¸т цепи :
j
r
r
r
r
Vj = j Tj-1⋅ j-1 Vj-1 + j R j-1⋅ j-1 Φ j-1 ⋅ q& ej-1 + q& rj ⋅ j a j, j = 1,...,n,
r
r
подчиняя (7) инициализациям : 0 V0 = 0 6
(7)
r
r
è q& e0 = 0 N 0 .
2-й рекурсивный оборот для j=n,...,1
после произведения инициализации :
n J ∗rrn = n J rrn ; n J ∗ren = n J ren ; n J ∗ern = n J ern ; n J ∗een = n J een
r
r
r
r
r
r
n
C rn∗ = n C rn + n Fnt ; n C en∗ = n C en + n Φ Tn ⋅ n Fnt
предусматривает
определениe
вспомогательных
инерционных
параметров
r
r
j ∗ j ∗ j ∗ j ∗ j r∗
J rrj , J rej , J erj , J eej , C j è j C ej ∗ , j = (n − 1),...,1 по следующему алгоритмическому
циклу :
1.
K j = j J ∗rrj − j J ∗rej ⋅ j J ∗eej-1 ⋅ j J ∗erj;
2.
Eñëè χ j = 0 èëè j ≠ 1, òî
{ G j = K j⋅ j Tj-1;
3.
j
r
r
r
m j =− j J ∗rej ⋅ j J ∗eej-1 ⋅ j C ej ∗ + j C rj ∗ .
H j = K j ⋅ j R j-1⋅ j-1 Φ j-1;
r
r
p j = K j ⋅ j h j + j m j }.
jr
1
Eñëè χ j = 0, òî Z j = j r T
r .
a j ⋅ K j⋅ j a j
5.
r r
~
Eñëè j ≠ 1 è χ j = 0, òî { U j = Z j ⋅ K j ⋅ j a j ⋅ j aTj ⋅ K j; G j = G j − U j ⋅ j Tj-1;
r
~
~ = j pr + K ⋅ j ar ⋅ (τ − j ar T ⋅ j pr ) ⋅ Z }.
H j = H j − U j ⋅ j R j-1⋅ j-1 Φ j-1; j p
j
j
j
j
j
j
j
j
r r
r
~
~
j~
j
Eñëè j ≠ 1 è χ j = 1, òî { G j = G j; H j = H j; p j = p j + K j ⋅ j a j ⋅ &q& rj }.
6.
Вычисление :
4.
5
~
j-1 ∗
J rrj-1 = j-1 J rrj-1 + j Tj-T1 ⋅ G j;
j-1 ∗
T
J erj-1 = j-1 J ∗rej1;
j-1
~
j-1 ∗
J rej-1 = j-1 J rej-1 + j Tj-T1 ⋅ H j;
r
j-1 ∗
~;
J eej-1 = j-1 J eej-1 + j-1 Φ Tj-1 ⋅ j R Tj-1 ⋅ j p
j
r
r
r
~;
Crj-∗1 = j-1 Crj-1 + j Tj-T1 ⋅ j p
j
j-1
r
r
r
~ .
Cej-∗1 = j-1 Cej-1 + j-1Φ Tj-1⋅ j R Tj-1 ⋅ j p
j
3-й рекурсивный оборот для j=1,...,n
использует результаты вычислений, произвед¸нных в процессе предшествующих расчетных оборотов, в целях определения для подмножества {M 1 } обобщ¸нных ускорений :
r
r
r
& + H ⋅ &q&e + j pr )], åñëè χ = 0, j ∈ {1,...,n},
&q&rj = Z j ⋅ [τ j − j aTj ⋅ (G j ⋅ j−1 V
j-1
j
j-1
j
j
(8)
затем для множества {M} - ускорений звеньев, ускорений упругих переменных и,
если требуется, внутренних усилий в парах :
j
r
r
r
r
& = j T ⋅ j-1 V
& + j R ⋅ j-1 Φ ⋅ &q&e + &q&r ⋅ j ar + j h , j = 1,...,n;
V
j
j-1
j-1
j-1
j-1
j-1
j
j
j
r
re
r
j ∗-1 j ∗ j &
j e∗
&q& j =− J eej ⋅( J erj ⋅ Vj + C j ), j = 1,...,n;
r
r
r
j
& + jm
Fj = K j ⋅ j V
j
j, j = 1,...,n
с уч¸том в (8) и (9) инициализаций
0
(9)
(10)
(11)
r
r
r
r r
V0 =[ 0 g T ,03T ]T и &q& e0 = 0 N 0 и, в заключении, для
подмножества {M 2 } - приводных усилий :
r
r
r
& + jm
& rj ) + Fvj ⋅ q& rj, åñëè χ j = 0, j ∈ {1,...,n}, (12)
Γ j = j a Tj ⋅ (K j ⋅ j V
j
j) + Fsj ⋅ Sign(q
где Fsj и Fvj - коэффициенты сухого и вязкого трений в парах.
4. Метод численного интегрирования уравнений движения
движения.
ния. В целях
численного интегрирования уравнений движения упругих манипуляторов
воспользуемся общей схемой Ньюмарка :
r
r
r
xr j (t + ∆t) = xr j (t) + x& j (t) ⋅ ∆t + [(0.5 − β) ⋅ &x& j (t) + β ⋅ &x& j (t + ∆t)] ⋅ ∆t 2 ,
r
r
r
r
x& (t + ∆t) = x& j (t) + [(0.5 − γ) ⋅ &x& j (t) + γ ⋅ &x& j (t + ∆t)] ⋅ ∆t ,
j = 1,...,n; t ∈ [0,T − ∆t],
(13)
r
r
где x j = [q rj,(q ej ) T ]T ; β и γ - постоянные ( 0 ≤ β ≤ 0.5 è 0 ≤ γ ≤ 1 ). В случае, когда
β = γ = 0 , система уравнений (13) вырождается в явную схему интегрирования Нью-
марка, использование которой при разрешении уравнений движения упругих механических систем зачастую сопряжено с необходимостью выбора чрезвычайно малого
шага интегрирования ∆t [6]. В случае же β ≠ 0 или γ ≠ 0 речь ид¸т о неявной схеме
6
интегрирования Ньюмарка (13) системы нелинейных дифференциальных уравнений
движения упругих манипуляторов :
r
r
rr
r
n
f [x( t + ∆t ), x& ( t + ∆t ), &x&( t + ∆t ), t ] = 0 p , p = ∑ N j + n; t ∈ [0,T − ∆t ],
j=1
(14)
r r r
r
где x = [ x1T , x T2 ,..., x Tn ]T , которая с уч¸том (13) приводится к линеаризованной форме :
r
r r
r r
n
F(&x& t + ∆t ) = F[&x&( t + ∆t ), t ] = 0 p , p = ∑ N j + n; t ∈ [0,T − ∆t ].
j=1
(15)
Решение системы линеаризованных уравнений (15) может быть осуществлено с
привлечением метода Ньютона [6] :
r
r
r
r r
&x&t + ∆t, k = &x&t + ∆t, k -1 − J −1 (&x&t + ∆t, k -1 ) ⋅ F(&x&t + ∆t, k -1 ), t ∈ [0,T − ∆t ]; k = 1,2,..., (16)
прич¸м J в (16) представляет собой якобиан системы уравнений (15), который, в
связи с выбором неявной схемы интегрирования Ньюмарка (13), рассчитывается в
виде
J = M + γ ⋅ ∆t ⋅ CT + β ⋅ ∆t 2 ⋅ KT,
(17)
где M - матрица масс; CT и KT - тангенциальные матрицы демпфирования и ж¸сткости соответственно, компоненты которых определяются выражениями
∂f i
CTij = ∂x&
j
, i, j = 1,...,
∂
f
KT = i
ij ∂x j
n
∑N
j
+ n.
(18)
j=1
Точное вычисление якобиана (17) в расчетной формуле метода Ньютона (16)
ускоряет процесс сходимости, но предполагает громоздкий расчет тангенциальных
матриц (18), особенно, при большом общем числе степеней свободы рассматриваемых
систем [6]. С другой стороны, ассимиляция якобиана с матрицей масс манипулятора в
(17), будучи оправданной для жестких систем, вызывает серьезные сомнения при
наличии в кинематической цепи упругих звеньев [6]. В этой связи представляет особый практический интерес компромиссный подход к преодолению указанных трудностей вычислительного характера, заключающийся в замещении точного выражения
якобиана (17) егo редуцированным аналогом :
J ≈ Diag j =1,...,n ( j M j + γ ⋅ ∆t⋅ j CTj + β ⋅ ∆t 2 ⋅ j KTj), j = 1,...,n,
7
(19)
расч¸т которого в контексте представления уравнений движения в форме НьютонаЭйлера обусловлен минимальными затратами вычислений.
Численная реализация предложенной методики расче
расчета.
та. Рассмотрим плоский
двухзвенный манипулятор, представленный на рис. 2. Система начинает движение из
горизонтального
положения
при
q 1r (0) = q r2 (0) = 0
с
постоянными
угловыми
r
1r
скоростями звеньев ω1 (t) ≡ 10рад/с и 2 ω 2 (t) ≡ 0. Для следующих геометрических и
инерционных
характеристик :
E 1 = E 2 = 7.0 ⋅1010 Í/ì 2 ;
l1 = l 2 = 0.8ì;
A 1 = A 2 = 4.0 ⋅10 −4 ì 2 ;
I z1 = 5.333 ⋅10 −8 ì 4 , I z 2 = 1.333 ⋅10 −8 ì 4
m 1 = m 2 = 2.512êã;
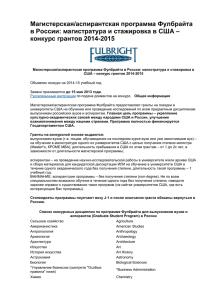
производим тест функционирования манипулятора в течение полного периода его
r
обращения. Графики линейных деформаций 2 u 2 (A 3 ) представлены на рис. 3 а и б
для случаев, когда звено 1 предполагается жестким, а звено 2 - упругим и когда оба
звена 1 и 2 полагаются упругими, приняв
r
r
r
r
q 1e (0) = q e2 (0) = q& 1e (0) = q& e2 (0) = 0 , где
N 1 = N 2 = 1 . Программная реализация расчетной методики осуществлена на языке
Turbo Pascal, тесты произведены на PC PENTIUM 100 с использованием переменных
расширенного типа точности Extended, машинное время подсчета программы
TEP=5 - 6 с. Результаты численных расчетов сопоставлены с одноименными характеристиками взятого из публикации [7] контрольного примера.
Рис. 2
8
6 ,0 0 E -0 3
4 ,0 0 E -0 3
2 ,0 0 E -0 3
0 ,0 0 E + 0 0
-2 ,0 0 E -0 3
-4 ,0 0 E -0 3
-6 ,0 0 E -0 3
-8 ,0 0 E -0 3
5. а)
6 ,0 0 E - 0 3
4 ,0 0 E - 0 3
2 ,0 0 E - 0 3
0 ,0 0 E + 0 0
- 2 ,0 0 E - 0 3
- 4 ,0 0 E - 0 3
- 6 ,0 0 E - 0 3
- 8 ,0 0 E - 0 3
б)
Рис. 3
СПИСОК ЛИТЕРАТУРЫ
1.
2.
3.
4.
5.
6.
7.
Luh J.Y.S., Walker M.W. and Paul R. On-line computational scheme for mechanical
manipulators // ASME Trans. Int. J. Dyn. Sys. Meas. and Control. - 1980. - V. 102, N2. - P. 69 76.
Boyer F. and Coiffet P. Generalization of Newton-Euler model for flexible manipulators // Int. J.
Robotic Systems. - 1996. - V. 13, N1. - P. 11 - 24.
Boyer F. and Coiffet P. Symbolic modeling of a flexible manipulator via assembling of its
generalized Newton-Euler model // Int. J. Mechanism and Machines Theory. - 1996. V. 31,
N1. - P. 45 - 56.
Dombre E. and Khalil W. Modйlisation, identification et commande des robots. - Paris, Hermиs,
1999.
Boyer F. and Khalil W. An efficient calculation of flexible manipulator inverse dynamics // Int. J.
Robotics Research. - 1998. - V. 17, N3. - P. 282 - 293.
Verlinden O. Simulation du comportement dynamique de systиmes multicorps flexibles
comportant des membrures de forme complexe: Thиse de Doctorat de la Facultй Polytechnique
de Mons (Belgique). – 1994. – 222p.
Avello A. and De Jalon J.G. Dynamics of flexible multibody systems using cartesian co-ordinates
and large displacement theory // Int. J. for Numerical Methods in Engineering. - 1991. - V. 32. P. 1543 - 1563.
ГИУА. Материал поступил в редакцию 31.10.2003.
9
ՅՈՒ.
ՅՈՒ.Լ. ՍԱՐԳՍՅԱՆ,
ՍԱՐԳՍՅԱՆ, Կ.Գ. ՍՏԵՓԱՆՅԱՆ,
ՍՏԵՓԱՆՅԱՆ, Ն. ԱԶՈԻԶ,
ԱԶՈԻԶ, Հ.Ա.ԳԵՎՈՐԳՅԱՆ
ԱՌԱՁԳԱԿԱՆ ՄԱՆԻՊՈՒԼՅԱՏՈՐՆԵՐԻ ԴԻՆԱՄԻԿԱԿԱՆ ՎԵՐԼՈԻԾՈՒԹՈԻՆԸ
ՆՅՈՒՏՈՆ - ԷՅԼԵՐԻ ԸՆԴՀԱՆՐԱՑՎԱԾ ՄԵԹՈԴՈՎ
Նյուտոն-Էյլերի ընդհանրացված մեթոդի հիման վրա մշակված է առաձգական մանիպուլյատորների դինամիկական վերլուծության խնդիրների լուծման ալգորիթմ, որը հնարավորութուն է ընձեռում առանց զանգվածների մատրիցի հակադարձման, թվային մեթոդով ինտեգրել մանիպուլյատորների շարժման հավասարումները: Առաջարկված ալգորիթմը զգալիորեն կրճատում է ինտեգրման վրա
ծախսվող մեքենայական ժամանակը, ինչն էական նշանակություն ունի մանիպուլյացիոն համակարգերի լավարկված նախագծման և կառավարման համար:
Yu.L. SARGSYAN, K.G. STEPANYAN, N. AZUZ, H.A. GEVORGYAN
DYNAMIC ANALYSIS OF FLEXIBLE MANIPULATORS USING THE
GENERALIZED NEWTON-EULER METHOD
An efficient computational algorithm for dynamic analysis of elastic manipulators based on the generalized Newton-Euler method is developed. The
algorithm enables the numerical integration of motion equations for elastic manipulators without inverting their inertia matrices and reduces considerably the
computer time necessary for the integration. This factor is significant for optimum
design and control problems of manipulator systems.
10