Общая теория движения по малоэксцентричным
advertisement

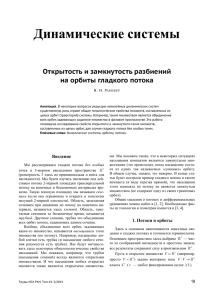
Общая теория движения по малоэксцентричным орбитам В.М. Юровицкий В современной космонавтике при исследовании орбитальных движений используется аппарат кеплеровский движений. Большая часть орбитальных движений приходится на почти круговые (малоэксцентричные) орбиты. Действительно, пусть разность между апогеем и перигеем орбиты составляет 100 км. Это очень большая величина для практическпи используемых орбит. Но и в этом случае эксцентриситет составляет всего 100/6400=0.013. Для такого орбитального движения кеплеровский аппарат излишне сложен. Данная работа посвящена созданию специального языка для описания движения по малоэксцентричным орбитам (МЭО). Уравнение движения КА по орбите имеет вид: r 2r 2 r 2 r r. ; (1) Здесь мы ввели систему отсчета с началом в центре Земли и с осью, направленной постоянно на КА. Система отсчета является вращающейся с угловой частотой ω. В первом уравнении введена центробежная сила инерции, а второе уравнение характеризует равновесие кориолисовых и тангенциальных сил вдоль касательного направления. Переменными задачи является радиус r и угловая скорость вращения системы отсчета ω. Решение этой задачи хорошо известно и дается в виде кеплерового движения. Наша задача получить более простое решение, соответствующее МЭО. Для круговой орбиты имеем стационарное решение: r R Const ; Const ; 2 R3 . (2) Для МЭО принимаем: r R (1 x); (1 w); (3) где x и w – малые величины. Кроме того, введем независимую переменную φ, связанную с переменной t соотношением: d (1 w). dt (4) Подставляя (3) и (4) в (1) и оставляя лишь члены первого порядка, получаем уравнения движения: x 2w 3x; 2 x w. (5) Рассмотрим одну из апсидальных точек траектории (апогей или перигей). В апсиде x’=0, x=0, w=w0=W. Для x получаем уравнение второго порядка с постоянными коэффициентами: x x 2W . Общее решение системы тривиально: x 2W (1 cos ) ; w W (3 4 cos ). (6) Кроме того, с точностью до второго порядка x x 2W sin . (7) Для зависимости фазы от времени имеем неявную зависимость: t 0 d 1 (1 3W ) 4W sin . ( ) (8) А для периода обращения получаем: T 2 (1 3W ). (9) Итак, фаза φ полностью определяет положение и все параметры на заданной орбите. А сама орбита полностью определяется набором параметров (Ω,W). Назовем параметр Ω углоскоростным параметром (УСП), а параметр W – углоскоростной аномалией (УСА). Физический смысл их достаточно прозрачен. УСП есть угловая скорость круговой орбиты, касающейся МЭО в одной из апсидальных точек. Будем называть их апсидальными орбитами. Причем ту, которая касается в перигейной точке, будем называть перигейной, и, соответственно, другую – апогейной орбитами. Реальная траекторие лежит в кольце между перигейной и апогейной орбитами. Углоскоростная аномалия есть относительное отклонение угловой скорости реальной орбиты в апсидальной точке от соответствующей апсидальной орбиты. Таким образом, каждая МЭО может быть описана не одним, а двумя описаниями – (Ω,W) и (Ω’,W’). Соотношение между ними: (1 6W ); W W . (10) Положительное значение УСА соответствует перигейному описанию, отрицательное – апогейному. Связь этого описания с эллиптическим через фокальный параметр и эксцентриситет дается выражениями: p R(1 2W ); e 2W . (11) На рисунке изображена схема расположения МЭО и ее апсидальных орбит. Единицей измерения УСА является сек-1. Для этой единицы предлагается дать особое название кес. Для практических целей удобно использовать мккес. Углоскоростной параметр можно измерять в промилле, пм, т.е. в тысячных долях. Таким образом, основы теории малоэксцентричных орбит заложены. В последующих статьях будет продемонстрировано приложение этой теории для решения разнообразных задач космонавтики. Апогейная орбита А P Реальная орбита (МЭО) Перигейная орбита Гостевая книга Назад