На правах рукописи Коноплин Владислав Игорьевич ОПТИМИЗАЦИЯ ПО БЫСТРОДЕЙСТВИЮ
advertisement

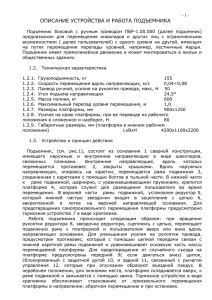
На правах рукописи Коноплин Владислав Игорьевич ОПТИМИЗАЦИЯ ПО БЫСТРОДЕЙСТВИЮ МИКРОПОЗИЦИОННЫХ ПРОГРАММНО-УПРАВЛЯЕМЫХ ЭЛЕКТРОПРИВОДОВ С УПРУГИМИ ВАЛОПРОВОДАМИ Специальность: 05.09.03 – Электротехнические комплексы и системы АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Краснодар – 2009 Работа выполнена в Кубанском государственном технологическом университете Научный руководитель: кандидат технических наук, доцент Добробаба Юрий Петрович Официальные оппоненты: доктор технических наук, профессор Тропин Владимир Валентинович; кандидат технических наук, доцент Кашин Яков Михайлович Ведущая организация: ОАО «ГАЗПРОМ» ДОАО «ЭЛЕКТРОГАЗ» (г. Краснодар) Защита состоится 24 ноября 2009 года в 14-00 на заседании диссертационного совета Д 212.100.06 Кубанского государственного технологического университета (350058, г. Краснодар, ул. Старокубанская, 88/4, ауд. №410) C диссертацией можно ознакомиться в библиотеке Кубанского государственного технологического университета Автореферат разослан 23 октября 2009 г. Ученый секретарь диссертационного совета, канд. техн. наук, доцент Л.Е. Копелевич ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность. В условиях комплексной автоматизации технологических процессов для некоторых отраслей промышленности требуется внедрение микропозиционных электроприводов с упругими валопроводами (ЭП с УВ), которые обеспечивают с заданной точностью фиксированное перемещение в пространстве исполнительных органов микропозиционных промышленных механизмов (ИОМ), и, в первую очередь, ЭП подач металло-, дерево- и камнеобрабатывающих станков. Такие ЭП должны удовлетворять заданным требованиям к быстродействию и точности позиционирования ИОМ. Серийно выпускаемые микропозиционные программно-управляемые ЭП с УВ по ряду причин не позволяют обеспечить быстродействие ИОМ при условии высокой точности их позиционирования. Поэтому решение задачи оптимизации по быстродействию перемещений микропозиционных ЭП с УВ является весьма актуальным. Цель работы − интенсификация перемещений (поворотов) ИОМ, с обеспечением предъявляемых к ним технических требований. Для достижения поставленной цели требуется решение следующих задач: - разработать оптимальные и близкую к оптимальной по быстро- действию диаграммы перемещения микропозиционных ЭП с УВ; - разработать задатчики интенсивности, формирующие опти- мальные и близкую к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с УВ; - синтезировать САР положения ИОМ микропозиционного ЭП с УВ; - экспериментально подтвердить полученные закономерности и работоспособность микропозиционных программно-управляемых ЭП с УВ. Методы и средства выполнения исследований. Для решения поставленных в диссертационной работе задач используются общепринятые методы теории автоматического управления, автоматизированного ЭП, аналитического и численного решений дифференциальных уравнений. В основу экспериментальных исследований положена методика испытаний микропроцессорного устройства, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ; испытания проведены согласно ГОСТ Р 51841-2001 (МЭК 61131-2-92) «Программируемые контроллеры. Общие требования и методы испытаний». Для получения и обработки экспериментальных результатов использовались: метод Левенберга − Маркардта, реализованный в программной среде MathCad; метод трапеций с точностью вычислений 108 , используемый при цифровом моделировании в приложении к пакету MatLab − Simulink. Решение задач, поставленных в диссертационной работе, позволило получить новые научные результаты: - методика формирования девяти видов оптимальных по быстро- действию диаграмм перемещения микропозиционных ЭП с УВ; - методика формирования близкой к оптимальной по быстродей- ствию диаграммы перемещения микропозиционных ЭП с УВ; - методика разработки задатчиков интенсивности, формирующих оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с идеальными валопроводами (ИВ) (безредукторных ЭП) и ЭП с УВ; - методика разработки задатчика интенсивности, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ; - методика синтеза двукратноинтегрирующих САР положения микропозиционных ЭП с УВ. Практическая ценность работы определяется тем, что использование полученных результатов теоретических и экспериментальных исследований позволяет улучшить характеристики микропозиционных программно-управляемых ЭП с УВ и, как следствие, интенсифицировать перемещения ИОМ, что увеличит производительность промышленных установок. Результаты диссертационной работы − методика формирования девяти видов оптимальных по быстродействию диаграмм перемещения микропозиционных ЭП с УВ; методика формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с УВ; методика разработки задатчиков интенсивности, формирующих оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ и ЭП с УВ; методика разработки задатчика интенсивности, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ; методика синтеза двукратноинтегрирующих САР положения микропозиционных ЭП с УВ − приняты к ис- пользованию при модернизации ЭП металлообрабатывающих станков на ООО «СП Седин-Шисс». Задатчик интенсивности для формирования оптимальных по быстродействию диаграмм перемещения микропозиционных ЭП с ИВ защищён патентом РФ на полезную модель №69354. Задатчик интенсивности для формирования оптимальных по быстродействию диаграмм перемещения микропозиционных ЭП с УВ защищён патентом РФ на полезную модель №81608. Задатчик интенсивности для формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с УВ защищён патентом РФ на полезную модель №67797. Модернизированная двукратноинтегрирующая САР положения микропозиционного ЭП с УВ защищена патентом РФ на изобретение №2350009. Синтезирована двукратноинтегрирующая САР положения микропозиционного ЭП с типовыми регуляторами (ТР) и УВ. Разработан, реализован и экспериментально исследован задатчик интенсивности на базе программируемого РС - совместимого контроллера «ADAM-5510M-A1», формирующий близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ. На основе методики разработки задатчика интенсивности для формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с УВ Ю.П. Добробабой, В.И. Коноплиным составлено учебно-методическое пособие для практических занятий и самостоятельной работы «Устройство для формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных электроприводов с упругими валопроводами», которое внедрено в учебный процесс по дисциплине «Теория решения изобретательских задач» на кафедре электроснабжения промышленных предприятий Кубанского государственного технологического университета. К защите представляются следующие основные положения: 1. Методика формирования девяти видов оптимальных по быстро- действию диаграмм перемещения микропозиционных ЭП с УВ. 2. Методика формирования близкой к оптимальной по быстродей- ствию диаграммы перемещения микропозиционных ЭП с УВ. 3. Методика разработки задатчиков интенсивности, формирующих оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ и ЭП с УВ. Задатчики интенсивности, формирующие оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ и ЭП с УВ. 4. Методика разработки задатчика интенсивности, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ. Задатчик интенсивности, формирующий близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ. 5. Методика синтеза двукратноинтегрирующих САР положения микропозиционных ЭП с УВ. Двукратноинтегрирующая САР положения микропозиционного ЭП с ТР и УВ. Модернизированная двукратноинтегрирующая САР положения микропозиционного ЭП с УВ. Апробация работы. Основные положения диссертационной работы доложены и обсуждены: на научных семинарах кафедры электроснабжения промышленных предприятий КубГТУ (2005-2008 годы); на научнопрактической конференции «Электроэнергетические комплексы и системы» (Краснодар, 2005 год); на научно-практической конференции «Электроэнергетические комплексы и системы» (Краснодар, 2006 год); на конкурсе лучших докладов ХХХIII студенческой научной конференции КубГТУ (Краснодар, 2006 год); на VIII региональной научно-практической конференции «Научное обеспечение агропромышленного комплекса» (Краснодар, 2006 год); на международной научно-практической конференции «Электроэнергетические комплексы и системы» (Краснодар, 2007 год); на расширенном заседании кафедры электроснабжения промышленных предприятий КубГТУ (Краснодар, 2008 год). Публикации. По результатам выполненных исследований опубликованы: 1 монография, 4 статьи, из них 1 статья в журнале, рекомендованном ВАК, 13 материалов конференций, 1 учебно-методическое пособие; получены: 1 патент РФ на изобретение, 3 патента РФ на полезную модель. Структура работы. Диссертационная работа состоит из введения, четырех глав, заключения, списка литературы и тринадцати приложений. Работа изложена на 227 страницах, включая 25 рисунков, 7 таблиц, 13 приложений на 78 страницах. Список литературы содержит 142 наименования. СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность работы, определена цель исследований, представлена научная новизна полученных результатов, сформулированы основные положения, выносимые на защиту. Первая глава диссертационной работы посвящена обзору отечественной и зарубежной литературы, постановке задач исследований. Выполнен анализ оптимальных по быстродействию диаграмм перемещения микропозиционных ЭП с ИВ при ограничении по напряжению. Выполнен анализ близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ при ограничении второй производной угловой скорости. Разработан задатчик интенсивности, формирующий оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ при ограничении по напряжению в зависимости от заданного изменения угла поворота. Выполнен анализ: задатчика интенсивности, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с ИВ при ограничении второй производной угловой скорости в зависимости от заданного изменения угла поворота; серийно выпускаемой однократноинтегрирующей САР положения ЭП с ИВ. В конце главы поставлены задачи исследований. Вторая глава диссертационной работы посвящена разработке оптимальных и близкой к оптимальной по быстродействию диаграмм перемещения микропозиционных программно-управляемых ЭП с УВ. Электропривод с УВ описывается математической моделью двухмассовой упругой электромеханической системы, которой соответствуют девять видов оптимальных по быстродействию диаграмм перемещения ИОМ. Определены аналитические зависимости контролируемых координат микропозиционных ЭП с УВ от времени при их оптимальном по быстродействию движении для каждого из девяти видов оптимальных по быстродействию диаграмм. Каждому из девяти видов оптимальных по быстродействию диаграмм перемещения ИОМ соответствует система из пяти нелинейных алгебраических уравнений, решение которой позволяет определить длительности этапов перемещения ИОМ t1 , t2 , t3 , t4 , t5 . Разработана близкая к оптимальной по быстродействию диаграмма перемещения микропозиционных ЭП с УВ, которая позволяет при незначительном снижении быстродействия обеспечить малую стоимость оборудования, простоту его настройки и снижение требований к квалификации обслуживающего персонала. На рисунке 1 представлена близкая к оптимальной по быстродействию диаграмма перемещения ИОМ микропозици онных ЭП с УВ, где приняты следующие обозначения: 2 − угол поворота ω(4) 2 , рад / с5 0 ω(3) 2 , рад / с4 t1 t2 t3 t4 t5 0 t ,c 0 t ,c 0 t ,c 0 t ,c 0 t ,c 0 t ,c 0 ω(2) 2 , 3 рад / с 0 ω(1) 2 , 2 рад / с 0 ω2 , рад / с 0 2 , рад Рисунок 1 – Близкая к оптимальной по быстродействию диаграмма перемещения микропозиционных ЭП с УВ (1) ИОМ; ω 2 − угловая скорость ИОМ; ω2 − первая производная угловой (2) (3) скорости ИОМ; ω2 − вторая производная угловой скорости ИОМ; ω2 − (4) третья производная угловой скорости ИОМ; ω2 − четвертая производная угловой скорости ИОМ. Диаграмма состоит из пяти этапов, длительности которых определяются из соотношений: t1 t5 t2 t4 5 6 кон нач ω(4) 2 max ; t3 3 5 5 6 кон(4) нач ; 2 ω2 max 5 1 5 6 кон нач ω(4) 2 max , где кон − конечное значение угла поворота ИОМ; нач − начальное зна(4) чение угла поворота ИОМ; ω2 max − максимальное значение четвертой производной угловой скорости ИОМ. Определены аналитические зависимости контролируемых координат микропозиционных ЭП от времени при их близком к оптимальному по быстродействию движении. Третья глава диссертационной работы посвящена разработке САУ перемещения микропозиционных ЭП с УВ. Разработан задатчик интенсивности, формирующий оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с УВ в зависимости от заданного изменения угла поворота ИОМ. Разработан задатчик интенсивности, формирующий близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ в зависимости от заданного изменения угла поворота ИОМ, обладающий простотой настройки, а также не требующий для своей реализации высокопроизводительных вычислительных систем. Структурная схема задатчика интенсивности представлена на рисунке 2, где приняты следующие обозначения: K1 , K 2 , K3 , K 4 − коэффициенты обратных связей; β − коэффициент пропорциональности, р − комплексный параметр преобразования Лапласа. Синтезирована двукратноинтергирующая САР положения микропозиционного ЭП с ТР и УВ, которая имеет следующие преимущества по сравнению с серийно выпускаемой: - отсутствие статической ошибки контура регулирования угловой скорости ИОМ; - отсутствие статической ошибки контура регулирования угла по- ворота ИОМ. Кроме того, скомпенсировано влияние упругости валопровода на динамические процессы. Внедрение предлагаемой двукратноинтегрирующей САР положения микропозиционного ЭП с ТР и УВ не требует капитальных затрат и позволяет достигнуть перечисленных показателей соответствующей настройкой системы. Синтезирована модернизированная двукратноинтегрирующая САР положения микропозиционного ЭП с УВ, структурная схема которой пред- β ω2 6 (4) m ax m ax (4) (4) -ω 2 ω2 m ax ω2 (4) 5 ( p) p ω2 p ( p) 1 (3) 5 1 ω2 2 3 (2) ( p) p 1 ω2 (1) ( p) p 1200 p 1 5065 2259 5 930 9335 4174 5 200 491 5 1075 155 177 5 395 ω2 ( p) 4 3 2 1 t1 t1 t1 t1 K4 K3 K2 K1 2 ( p) родействию диаграмму перемещения микропозиционных ЭП с УВ Рисунок 2 – Структурная схема задатчика интенсивности, формирующего близкую к оптимальной по быст- кон кон нач ставлена на рисунке 3, где приняты следующие обозначения: РП − регулятор положения; ФКС − фильтр контура скорости; РС − регулятор скорости; ККС − корректор контура регулирования скорости; РТ − регулятор тока; КУ − компенсирующее устройство; ИП − импульсный преобразователь; U зп − задающее напряжение контура регулирования угла поворота ИОМ; U зс − задающее напряжение контура регулирования угловой скорости ИОМ; U зт − задающее напряжение контура регулирования тока; U упр − напряжение управления; U огр − напряжение ограничения; U − напряжение, приложенное к якорной цепи ЭД; I я − ток якорной цепи ЭД; Cе − коэффициент пропорциональности между напряжением и угловой скоростью электродвигателя (ЭД); Cм − коэффициент пропорциональности между током и моментом ЭД; Су − жесткость валопровода; Rя − сопротивление якорной цепи ЭД; Lя − индуктивность якорной цепи ЭД; J1 − момент инерции ЭД; J 2 − момент инерции ИОМ; M c − момент сопротивления; M у − момент упругий; ω1 − угловая скорость ЭД; К от − коэффициент об- ратной связи по току; К ос − коэффициент обратной связи по скорости; К оп − коэффициент обратной связи по положению; К рп − коэффициент усиления РП; К ип − коэффициент усиления ИП, W − передаточная функция. Предлагаемая модернизированная двукратноинтегрирующая САР положения микропозиционного ЭП с УВ имеет следующие преимущества Wфкс ( p) ФКС K рп РП U зc ( p) РС Wрс ( p) U огр ККС Wккс ( p ) U зт ( p) ИП РТ K оп K оc Wc K от Kип Wрт ( p) U упр ( p) U( p) КУ Wку Rя 1 Lя p I я ( p) Cм Cе 1 J1 p ω1 ( p) J2 p p M c ( p) 1 Cy M y ( p) ω2 ( p ) 1 2 ( p) p ционного ЭП с УВ Рисунок 3 – Структурная схема модернизированной двукратноинтегрирующей САР положения микропози- Uзп ( p) U огр по сравнению с двукратноинтегрирующей САР положения микропозиционного ЭП с ТР и УВ: - повышение быстродействия контура регулирования угловой скорости ИОМ в 16 раз; - повышение быстродействия контура регулирования угла пово- рота ИОМ в 16 раз. Цифровое моделирование разработанных устройств позволило проверить полученные закономерности и подтвердило работоспособность исследуемых моделей. В четвертой главе диссертационной работы изложены результаты экспериментальных исследований микропозиционных программно- управляемых ЭП с УВ. Проведены экспериментальные исследования задатчика интенсивности, формирующего близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ, на базе PC – совместимого контроллера «ADAM-5510M-A1», оценена погрешность формируемого сигнала задания. Экспериментально исследованы электротехнические комплексы, состоящие из задатчика интенсивности на базе микропроцессорного устройства и цифровых моделей: - двукратноинтегрирующей САР положения микропозиционного ЭП с ТР и УВ; - модернизированной двукратноинтегрирующей САР положения микропозиционного ЭП с УВ. Оценена суммарная погрешность формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных ЭП с УВ. Разработана методика исследования влияния изменения жесткости валопроводов ЭП подач суппортов металлообрабатывающих токарнокарусельных станков на переходные процессы при перемещении резца. Экспериментально исследованы ЭП подач суппорта токарно-карусельного станка 1A512MФ3 производства ООО «СП СЕДИН ШИСС», г. Краснодар. Результаты экспериментальных исследований свидетельствуют об отсутствии необходимости параметрической адаптации САР положения ЭП подачи суппортов металлообрабатывающих токарно-карусельных станков для компенсации изменения жесткости валопровода при различных начальных положениях резца. Основные результаты теоретических и экспериментальных исследований заключаются в следующем: 1. Разработаны девять видов оптимальных по быстродействию диаграмм перемещения микропозиционных ЭП с УВ. Определены аналитические зависимости контролируемых координат ЭП от времени при их оптимальном по быстродействию движении. 2. Разработана близкая к оптимальной по быстродействию диа- грамма перемещения микропозиционных ЭП с УВ, которая позволяет при незначительном снижении быстродействия обеспечить малую стоимость оборудования, простоту его настройки и снижение требований к квалификации обслуживающего персонала. Определены аналитические зависимости контролируемых координат ЭП от времени при их близком к оптимальному по быстродействию движении. 3. Разработаны задатчики интенсивности, формирующие опти- мальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ и ЭП с УВ в зависимости от заданного изменения угла поворота ИОМ. 4. Разработан задатчик интенсивности, формирующий близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ в зависимости от заданного изменения угла поворота ИОМ, обладающий простотой настройки параметров, не требующий для своей реализации высокопроизводительных вычислительных систем. 5. Синтезированы: двукратноинтегрирующая САР положения микропозиционного ЭП с ТР и УВ, которая обеспечивает отсутствие статической ошибки контура регулирования угловой скорости ИОМ, отсутствие статической ошибки контура регулирования угла поворота ИОМ; модернизированная двукратноинтегрирующая САР положения микропозиционного ЭП с УВ, которая обеспечивает повышение быстродействия контура регулирования угловой скорости ИОМ, повышение быстродействия контура регулирования угла поворота ИОМ в 16 раз по сравнению с двукратноинтегрирующей САР положения микропозиционного ЭП с ТР и УВ. 6. Цифровое моделирование задатчиков интенсивности, формиру- ющих оптимальные по быстродействию диаграммы перемещения микропозиционных ЭП с ИВ и ЭП с УВ и близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ; двукратноинтегрирующей САР положения микропозиционного ЭП с ТР и УВ и модернизированной двукратноинтегрирующей САР положения микропозиционного ЭП с УВ подтвердило полученные закономерности и работоспособность исследуемых моделей. 7. Разработан, реализован и экспериментально исследован задат- чик интенсивности на базе программируемого PC – совместимого контроллера «ADAM-5510M-A1», формирующий близкую к оптимальной по быстродействию диаграмму перемещения микропозиционных ЭП с УВ. По материалам диссертации опубликованы следующие работы: 1. Оптимальная по быстродействию диаграмма перемещения электропривода с упругим валопроводом при ограничении по току / Ю.П. Добробаба, В.А. Мурлина, В.В. Ивченко, В.И. Коноплин // Мат-лы науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2005. − С. 53−55. 2. Добробаба Ю.П., Коноплин В.И. Разработка оптимальных по быстродействию диаграмм перемещения электроприводов с упругими валопроводами. Постановка задач // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 42−45. 3. Разработка оптимальной по быстродействию первого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению / Ю.П. Добробаба, В.И. Коноплин, Б.С. Литаш, А.Е. Максименко // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 46−49. 4. Добробаба Ю.П., Коноплин В.И., Дурлештер И.А. Разработка оптимальной по быстродействию второго вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 50−53. 5. Добробаба Ю.П., Коноплин В.И., Даниленко Д.С. Разработка оптимальной по быстродействию третьего вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 54−57. 6. Добробаба Ю.П., Коноплин В.И., Олейников А.А. Разработка оптимальной по быстродействию четвертого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 58−61. 7. Добробаба Ю.П., Коноплин В.И., Дрижжа Д.Ф. Разработка оптимальной по быстродействию пятого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 62−66. 8. Литаш Б.С., Коноплин В.И. Разработка оптимальных по быстродействию диаграмм перемещения электроприводов с упругими валопроводами и формирующих их устройств // Сб. науч. работ студентов, отмеченных наградами на конкурсах. Вып. / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. − С. 75−76. 9. Коноплин В.И. Разработка оптимальных по быстродействию диаграмм перемещения микропозиционных электроприводов с упругими валопроводами // Мат-лы VIII региональной науч.-практич. конференции / Кубан. гос. аграр. ун-т. − Краснодар: Изд. ФГОУ ВПО «КубГАУ», 2006. − С. 308−310. 10. Добробаба Ю.П., Коноплин В.И. Разработка оптимальной по быстродействию шестого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. − С. 14−19. 11. Добробаба Ю.П., Коноплин В.И. Разработка оптимальной по быстродействию седьмого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. − С. 20−25. 12. Добробаба Ю.П., Коноплин В.И. Разработка оптимальной по быстродействию восьмого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. − С. 26−33. 13. Добробаба Ю.П., Коноплин В.И. Разработка оптимальной по быстродействию девятого вида диаграммы перемещения электропривода с упругим валопроводом при ограничении по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. − Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. − С. 34−40. 14. Добробаба Ю.П., Коноплин В.И. Разработка оптимальных по быстродействию первой группы диаграмм перемещения микропозиционных электроприводов с упругими валопроводами // Изв. вузов. Пищевая технология. 2007. №4. С. 8588. 15. Добробаба Ю.П., Коноплин В.И., Барандыч В.Ю. Двукратноинтегрирующая система автоматического регулирования положения электропривода с типовыми регуляторами и упругим валопроводом // Изв. вузов. Пищевая технология. 2007. №5-6. С. 103104. 16. Пат. на полезную модель 67797 РФ, МПК Н 02 Р 7/14 (2006.01). Устройство для формирования оптимальных по быстродействию диаграмм перемещения исполнительного органа механизма, упруго соединенного с электродвигателем, с ограничением четвертой производной скорости / Ю.П. Добробаба, В.И. Коноплин, Ю.В. Добробаба; заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2007128139/22; заявл. 20.07.07; опубл. 20.10.07, Бюл. № 30. 17. Пат. на полезную модель 69354 РФ, МПК Н 02 Р 5/60 (2006.01). Устройство для формирования оптимальной по быстродействию диаграммы перемещения электропривода с моментом сопротивления типа сухого трения при ограничении по напряжению / Ю.П. Добробаба, Д.С. Прохоренко, В.Ю. Барандыч, В.И. Коноплин; заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2007120427/22; заявл. 31.05.07; опубл. 10.12.07, Бюл. № 34. 18. Добробаба Ю.П., Коноплин В.И. Разработка оптимальных по быстродействию диаграмм перемещения микропозиционных электроприводов с упругими валопроводами // Изв. вузов. Электромеханика. 2008. №3. С. 3942. 19. Добробаба Ю.П., Коноплин В.И. Разработка близкой к оптимальной по быстродействию диаграммы перемещения микропозиционного электропривода с упругим валопроводом // Изв. вузов. Пищевая технология. 2008. №4. С. 8183. 20. Добробаба Ю.П., Коноплин В.И. Устройство для формирования близкой к оптимальной по быстродействию диаграммы перемещения микропозиционных электроприводов с упругими валопроводами: учеб.-метод. пособие // Кубан. гос. технол. ун-т. − Краснодар: Изд. КубГТУ, 2008 − 51 с. 21. Добробаба Ю.П., Коноплин В.И. Микропозиционный программно-управляемый электропривод с упругим валопроводом: монография / Кубан. гос. технол. ун-т. − Краснодар: Изд. КубГТУ, 2008 − 156 с. 22. Пат. на изобретение 2350009 РФ, МПК Н 02 Р 7/14 (2006.01). Микропозиционный программно-управляемый электропривод с упругим валопроводом / Ю.П. Добробаба, В.И. Коноплин, заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2008102519/09; заявл. 22.01.08; опубл. 20.03.09, Бюл. № 8. 23. Пат. на полезную модель 81608 РФ, МПК Н 02 Р 7/14 (2006.01). Устройство для формирования оптимальных по быстродействию диаграмм перемещения исполнительного органа механизма, упругосоединенного с электродвигателем, с ограничением напряжения / Ю.П. Добробаба, В.И. Коноплин; заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2008147625/22; заявл. 02.12.08; опубл. 20.03.09, Бюл. № 8.