Document 902327
advertisement

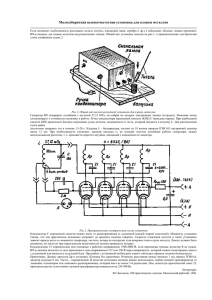
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования «ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» УТВЕРЖДАЮ Декан электрофизического факультета ____________ Г.С. Евтушенко «___ » _____________ 2008 г. Методическое пособие по выполнению лабораторной работы Исследование электродинамического сейсмоприёмника Для студентов магистерской подготовки «Геофизическое приборостроение» Томск Исследование электродинамического сейсмоприёмника 1. Цель работы Целью лабораторной работы является изучение элементов, принципа действия и конструкции сейсмоприёмника (СП); экспериментальное определение его характеристик. 2. Содержание работы 2.1. Назначение и принцип действия сейсмоприёмника. 2.2. Изучение конструкции сейсмоприёмника. 2.3. Экспериментальное определение переходной характеристики (СП). 2.4. Экспериментальное определение частотной характеристики (СП). 2.5.Обработка полученных результатов, составление отчёта. 3. Принцип действия и конструкция сейсмоприёмника Сейсмоприёмники являются датчиками первичной информации в сейсморазведке, которая представляет собой геофизический метод изучения геологических объектов с помощью упругих колебаний - сейсмических волн. Этот метод основан на том, что скорость распространения и другие характеристики сейсмических волн зависят от свойств геологической среды, в которой они распространяются: от состава горных пород, их пористости, трещиноватости, флюидонасыщенности, напряженного состояния и температурных условий залегания. Геологическая среда характеризуется неравномерным распределением этих свойств, что проявляется в отражении, преломлении, рефракции, дифракции и поглощении сейсмических волн. Изучение отраженных, преломленных, рефрагированных и других типов волн с целью выявления пространственного распределении и количественной оценки упругих и других свойств геологической среды - составляет содержание методов сейсморазведки. Сейсмические исследования имеют своей целью поиск новых месторождений или уточнение геологического строения уже разведанных залежей. Запись сейсмического поля производят во множестве точек, поэтому аппаратура должна быть многоканальной. Технические средства сейсморазведки можно разделить по функциональному назначению на 4 группы: Системы записи и предварительной обработки; Обрабатывающие системы; Системы источников сейсмических волн; Вспомогательные средства. Средства записи должны обладать высокой чувствительностью, разрешающей способностью и точностью. На рис.1 представлена типовая структура сейсмического канала записи. СП1 1 2 СПn 3 4 1 Рис.1.Структура сейсмического канала записи Сигналы от сейсмоприёмников (СП) поступают на аналоговые предварительные усилители (ПУ) 1, имеющие трансформаторный вход, что ограничивает пропускание инфранизких частот и снижает взаимные влияния на входе. В состав ПУ входят три вида частотных фильтров: низкочастотный (ФНЧ), высокочастотный (ФВЧ) и режекторный. Выходы усилителей 1 подаются на коммутатор каналов 2, затем на АЦП 3 и регистрирующее устройство 4. В наземной сейсморазведке наблюдения ведут в большинстве случаев на свободной поверхности земли. Приход упругих волн к поверхности вызывает ее движение, и это движение необходимо воспринять и преобразовать в изменение электрического напряжения. Преобразование механических колебаний в электрическое напряжение обычно осуществляют с помощью сейсмоприёмников электродинамического типа, действие которых основано на явлении электромагнитной индукции. На рис.2 представлен внешний вид таких сейсмоприёмников. Как правило, сейсмоприемники имеют цилиндрическую форму с диаметром около 3см, высотой примерно 10 см и массой 150 г. Рис.2. Внешний вид сейсмоприемников а – вертикальный; б – горизонтальный Штырь служит для создания контакта с почвой, крепится к корпусу резьбой и может быть снят при необходимости. От каждого установленного на профиле сейсмоприемника электрическое напряжение подводят к входу сейсмостанции с помощью двух проводов, подсоединяемых к двум клеммам сейсмоприемника. Образующийся при использовании сей- смоприемников жгут проводов (многопроводной кабель) называют сейсмокосой. Длина сейсмокосы может достигать 3 км и более. Рис.3. Устройство вертикального сейсмоприёмника 1 – корпус; 2 –магнит; 3 – катушка; 4 – штырь; 5 – клеммы. Типовая конструкция сейсмоприёмника электродинамического типа (рис.3) представляет собой схему, симметричную относительно оси цилиндрического постоянного магнита 2, который закреплён на корпусе 1. Рабочее магнитное поле создаётся в зазоре между постоянным магнитом и внешним магнитопроводом. Подвижной системой является катушка 3 на каркасе, который может быть изготовлен как из диэлектрика, так и из электропроводного материала. В первом случае электродинамическое затухание осуществляется за счёт внешнего сопротивления, шунтирующего обмотку катушки. При использовании проводящего каркаса затухание в основном обеспечивается токами, наведёнными в каркасе при его перемещении в магнитном поле. Окончательную величину затухания устанавливают дополнительным шунтированием катушки. Подвижная система подвешена в корпусе на круглых пружинах. Такая конструкция пружин позволяет осуществлять перемещение подвижной системы только по оси сейсмоприёмника, устраняя до минимума боковые движения. Для компенсации массы подвижной системы центральная часть пружин в свободном состоянии вынесена из плоскости пружины на определённую величину, с таким расчётом, чтобы при загрузке массой подвижной системы пружины приобретали плоскую форму. Крепление пружин к катушке и к корпусу, как правило, осуществляют зажимными кольцами. Электрический сигнал с катушки индуктивности передают через пружинные выводы 5. Таким образом, сейсмоприёмник можно представить состоящим из механической части (катушка на пружинах) и электрической части (рис. 4), которая включает в себя обмотку 1 катушки находящейся в магнитном поле постоянного магнита, шунт 2 и зажимы 3 для подключения СП к сейсмокосе. Рис. 4. электрическая часть СП Колебания частиц почвы, передаваясь корпусу и постоянному магниту, вызывают относительные перемещения их и катушки, которая, являясь инерционной массой, отстаёт от движения корпуса. Дифференциальное уравнение движения механической части СП имеет вид x 2hx n 0 x , (1) где x - смещение подвижной системы относительно корпуса; h / m -коэффициент затухания; n 2 0 c / m - частота собственных колебаний подвижной системы; - механическое усиление сейсмоприёмника; - смещение почвы; μ – коэффициент сил вязкого трения; m – масса подвижной системы; с – жёсткость пружины. Собственное движение механической части СП (рис.5) зависит от величины его коэффициента затухания. Рис.5. Переходный процесс СП при различном затухании: 1-слабозатушенный (h<n0 ); 2- перезатушенный (h>n0 ); 3 – при критическом затухании; 4 – при оптимальном затухании ( h n 0 2 ). На практике слабозатушенные (рис.5, кривая 1) СП не используют ввиду большой длительности переходного процесса. Переходный процесс перезатушенного СП имеет вид апериодической кривой (рис.5, кривая2), что сопровождается увеличением длительности переходного процесса и уменьшением чувствительности приёмника. Собственные колебания СП при критическом затухании (n0=h) имеет вид кривой 3 на рис.5. Используемые на практике СП, как правило, настраивают на оптимальное затухание (кривая 4, рис.5). Электрический сигнал СП образуется за счёт перемещения катушки индуктивности в поле постоянного магнита с магнитным потоком Ф и индукцией В. В ка- тушке возникает э.д.с., пропорциональная относительной скорости перемещения катушки и магнита (2) E wBx kx , где k wB называется коэффициентом электромеханической связи СП; w-число витков катушки; -длина витка в зазоре. Таким образом, выходной сигнал сейсмоприёмника пропорционален скорости смещения почвы. В СП осуществляется электромагнитное затухание инертной массы, возникающие в катушке индукционные токи, в соответствии с правилом Ленца, взаимодействуя с полем постоянного магнита, препятствуют движению катушки. Быстрота затухания зависит от сопротивления шунта и характеризуется коэффициентом k2 , (3) h 2 Rm где R – сопротивление шунта. Важной характеристикой СП является его собственная частота 1 c ,(Гц). (4) f0 2 m По значениям f 0 сейсмоприемники разделяют на низкочастотные (5—10 Гц) и среднечастотные (15—30 Гц). Чувствительность сейсмоприемников составляет (0,3—0,7)В/см. Особенности регистрации сейсмоприёмником колебаний почвы отражаются в его частотной характеристике (рис.6). Рис.6. Амплитудно-частотные характеристики СП 1-слабозатушенный СП; 2- оптимальное затухание; 3- сильнозатушенный СП. Частотная характеристика показывает, как изменяется напряжение на выходе сейсмоприемника в зависимости от частоты колебаний почвы, если скорость смещения задается в виде x x 0 sin 2 ft где f - частота; x 0 - амплитуда скорости смещения. Сейсмоприемники предназначаются для регистрации упругих волн, наблюдаемых одновременно на различных удалениях от пункта возбуждения. Для того чтобы можно было точно определить истинную разность времен прихода одних и тех же волн к различным пунктам наблюдения, необходимо, чтобы все сейсмоприемники передавали колебания земли без искажения их формы и без временных сдвигов (задержек). Отсюда возникают высокие требования к идентичности сейсмоприемников, совпадению их частотных характеристик. Частотные характеристики сейсмоприемников определяют лишь их потенциальные возможности. Реальный процесс преобразования зависит от условий установки, от силы сцепления сейсмоприемника с грунтом и упругих свойств грунта. Таким образом, чтобы волны регистрировались без искажений, собственная частота f 0 СП должна быть меньше нижней граничной частоты fн регистрируемых колебаний. С увеличением h (уменьшением сопротивления R шунта) убывает амплитуда максимума характеристики. Сопротивление R выбирается таким, чтобы отсутствовал максимум характеристики, и чувствительность СП была постоянной в широкой полосе частот. 4. Используемое оборудование Исследуемый сейсмоприёмник типа , цифровой самописец S-Recoder , персональный компьютер, вибростенд ST – 1000. 5. Порядок выполнения работы 5.1. По описанию, рекомендованной литературе изучить конструкцию и свойства сейсмоприёмника. 5.2. Определить параметры переходной характеристики СП, для этого использовать цифровой самописец и ПК: - запустить S-Recoder; - начать работать с устройством; - вид; - запустить запись и создать переходный процесс; - сохранение собранных данных; - присвоить имя файлу; - открыть сохранённый файл; - файл: «экспорт»; - сохранить в формате Excel (csv). Измерения провести для различных величин сопротивления R шунта. Построить переходные характеристики. 5.3. Определить частотную характеристику СП. Для этого установить СП на вибростенд. Изменять частоту вибрации в диапазоне от 5 Гц до 30 Гц и измерять выходной сигнал СП, результаты измерения занести в таблицу. Измерения провести для различных величин сопротивления R шунта. Частота f 5 7 10 15 17 20 23 25 27 30 [Гц] ξвибр.[мм] 2 1,4 1 0,77 0,6 0,5 0,44 0,4 0,33 Uвых [В] Порядок работы с вибростендом (работает только верхний канал): 1. Все выключатели перед включением должны находиться в выключенном состоянии. 2. Включить вибростенд в сеть 220В, 50Гц. 3. Поставить общий выключатель 21 в положение «включено». 4. Поставить ручки 33,34 (амплитуда, частота) на генераторе в крайнее левое положение. 5. Включить левую кнопку «переключение». Правой кнопки не касаться!!! 6. На блоке питания (правая секция) тумблер 63 «накал» поставить в верхнее положение (рис1,б). 7. Через 15 секунд включить тумблер «анод» 8. Поставить выключатель 29 «питание магнита» в верхнее положение. 9. Провести градуировку стенда, для этого установить частоту и амплитуду колебаний стенда «0», если при этом есть колебания стола то необходимо их устранить, плавно поворачивая рукоятку «градуировка». 10. Установить желаемую частоту и плавно увеличить амплитуду до необходимого значения. Амплитуду колебаний вибростенда измерять микроскопом «Мир». 11. Выключение вибростенда: Переключатели амплитуды и частоты поставить в нулевое положение «Питание магнита» в положение «выключено» Выключить переключатели «анод» и «накал» Общий переключатель – в положение «выключено» Выключить вибростенд из сети. 5.4. По экспериментальным данным построить частотную характеристику, определить по ней собственную частоту СП. 5.5. По переходной характеристике (рис.7) рассчитать коэффициент затухания h и коэффициент электромеханической связи k СП. 1 A A U (r R ) h 0 n 1 [ 2 ( n 1 ) 2 ] 2 ; (5) k вых A2 A2 R Где r – сопротивление катушки индуктивности СП. Рис.7. Переходный процесс сейсмоприёмника 6.Содержание отчёта Отчёт должен содержать: Цель работы; Результаты экспериментальных ответы на контрольные вопросы. исследований с выводами Приложение А Виброустановка ST-1000 А.1 Назначение виброустановки Вибрационный стенд ST-1000 предназначен для воспроизведения механических гармонических колебаний, для исследования их на объекты, приборы и аппаратуру во время эксплуатации. Частота и амплитуда колебаний регулируются во время испытания. Стенд воспроизводит встречаемые на практике вибрации в диапазоне частот от 20 Гц до 1000 Гц. В указанном диапазоне частот могут быть исследованы области резонанса механических деталей и узлов, функциональных устройств электромеханических и электронных приборов и аппаратуры; могут производиться их испытания на вибропрочность или виброустойчивость. При продолжительном испытании изделий на виброустойчивость и вибропрочность при максимальной нагрузке, предусмотрена возможность принудительного воздушного охлаждения вибратора. Для закрепления испытываемого объекта к вибрационному столу следует применять легкие, но жесткие крепежные элементы, кронштейны и приспособления, чтобы статическая нагрузка на подвижную систему стенда осталась минимальной. Закрепление изделий к планшайбе должно быть прочным и надежным, в противном случае возможны ошибочные результаты. Комплект виброустановки ST-1000 состоит из вибратора (вибростенда) с силовыми и сигнальными кабелями, пульта управления и кабеля для подключения пульта к промышленной электросети. Основные технические характеристики виброустановки представлены в таблице Таблица А.1 - Основные технические характеристики виброустановки Диапазон воспризводимых частот, Гц Диапазон амплитуды виброперемещения стола, мм Диапазон виброускорения стола: на холостом ходу, g при массе испытуемого изделия 15 кг, g Масса испытываемого объекта, кг, не более Диаметры сменных планшайб стола для закрепления испытуемых изделий, мм Питание – промышленная сеть переменного тока напряжением 220 В, частота питающей сети 50 Гц Массо-габаритные характеристики: вибрационного стенда: длина×ширина×высота, см диаметр корпуса магнитопровода, см масса, кг пульта управления: длина×ширина×высота, см масса, кг 20-1000 0±8 0…12 0…6 15 120, 250, 500 92×56×90 53 500 110×71×92 200 А.2 Конструкция и принцип действия виброустановки А.2.1 Вибратор (актюатор, вибрационный стол) Вибрационный стенд (вибратор) снабжен подвижной системой с электродинамическим приводом. Принцип работы вибратора заключается в следующем. В кольцевой зазор электромагнита, питаемого постоянным током, помещается катушка, закрепленная на упругой подвижной системе. При пропускании через катушку переменного тока, амплитуда и частота которого могут быть регулируемыми, она начинает выталкиваться из зазора или втягиваться в него в такт с частотой пропускаемого тока. Величина (амплитуда) линейного перемещения катушки зависит от величины пропускаемого через нее переменного тока и величины тока подмагничивания электромагнита (примерно, так как это происходит в громкоговорителях). Катушка жестко связана с механической подвижной системой на направляющих пружинах. Конструкция электродинамического вибростенда виброустановки приведена на рисунке А.1. Рисунок А.1 – Вибратор электродинамический 1-Станина; 2-Резиновые втулки (амортизаторы); 3-Магнитопровод; 4-Защитный колпак вверху; 5-Амортизатор вибрации; 6-Плоские пружины; 7Планшайба для испытаний объекта; 8-Фланец присоединения; 9- Стержень; 10-Катушка подмагничивания; 11-Зажимной рычаг; 12-Штуцер воздушного охлаждения; 13-Вибрирующая (управляющая) катушка; 14-Присоединительные зажимные клеммы; 15-Заземление; 16-Колпак нижний; 17-Датчик ускорения; 18-Осциллятор; 19-Ручка регулировки «нуля» датчика ускорения. Вибратор представляет собой цилиндрический магнитопровода 3 из литой стали. Он установлен в чугунной станине 1 на резиновых втулках 2 (эластичных амортизаторах), в которых он может быть повернут от вертикального положения в диапазоне углов от 0° до ± 90 0. Эластичные амортизаторы передают лишь в незначительной мере остаточные вибрации на основание, а потому для вибростенда не требуется особого фундамента. Магнитопровод вибратора построен по принципу громкоговорителя. Внутри корпуса магнитопровода на сердечнике уложена обмотка подмагничивания 10 для создания постоянного магнитного поля. В воздушном зазоре магнитопровода помещена катушка управления 13, которая закреплена на несущем стержне 9 с фланцем 8, на котором может быть закреплена одна из сменных планшайб 7. Оба последние образуют совместно систему колебания. Четыре плоские пружины 6 по две вверху и внизу, ведут упомянутую систему параллельно к зазору. Для ограничений колебаний подвижной системы в резонансной области, упругие элементы снабжены ограничителями-амортизаторами 5. Испытываемый объект можно прикрепить с помощью 4-х винтов либо к фланцу 8 (применяя, например, легкий по жесткости стержень, либо к одной из сменных планшайб 7, Вибрирующая катушка размещена в нижней части магнитопровода для уменьшения нежелательного воздействия на испытываемый объект потоков рассеяния магнитного поля в зазоре магнитопровода. К подвижной системе жестко присоединен емкостной датчик ускорения 17, а к корпусу - осциллятор 18 измерительного устройства ускорения 40. Анодный ток покоя осциллятора 18 устанавливается, вдавливая и поворачивая ручку регулировки 19. В нижней части магнитопровода 3 находятся клеммы 14 для присоединения к пульту управления. Все движущиеся и токопроводящие части защищены колпаками 4 и 16 от соприкосновения. Отверстие верхнего колпака 4 закрыто резиновой мембраной для защиты внутреннего объема корпуса магнитопровода и зазора вибрирующей катушки от проникновения металлических стружек, посторонних предметов и пыли. Два зажимных рычага 11 фиксируют положение наклона стола в необходимом положении от 0 до 90 0. При продолжительной работе с максимальной нагрузкой, предусмотрена возможность для воздушного охлаждения катушки. Для чего к штуцеру 12 с фильтром предусмотрено присоединение пылесоса или центробежного вентилятора либо подводится сухой очищенный сжатый воздух централизованных пневмосистем. А.2.2 Пульт управления Конструкция пульта управления подвижной системой вибратора приведена на рисунке 2. Рисунок А.2 - Пульт управления электродинамическим вибратором виброустановки ST-1000 20-Панель включения; 21-Главный выключатель сети; 22-Сигнальная лампочка сети; 23-Зеленая кнопка для параллельного включения; 24-Зеленая сигнальная лампочка; 25-Указатель степени модуляции; 26-Красная сигнальная лампочка; 27-Красная кнопка для последовательного включения; 28-Сигнальная лампочка питания магнита; 29-Включение питания магнита; 30- Генератор; 31-Индикатор настройки нулевой точки; 32-Нулевой корректор; 33-Регулятор амплитуды; 34-Установка частоты; 35-Шкала частоты; 36-Сигнальная лампочка; 37-Предохранитель 100 мА; 38Выключатель; 40-Устройство измерения ускорения; 41-Сигнальная лампочка; 42-Предохранитель 300 мА; 43-Выключатель; 44-Прибор анодного тока покоя осциллятора; 45-Прибор указания ускорения; 46-Письменный пульт; 50-Усилитель 350 Вт; 51-Потенциометр; 52-Симметрирование; 53Потенциометр; 54-Прибор измерения; 55-Пенеключатель; 60-Блок питания усилителей; 61-Предохранитель сети 6 А; 62-Предохранитель сети 2 А; 63-Сигнальная лампочка; 64-Трехступенчатый переключатель;65-Предохранитель анода 800 мА; 66-Предохранитель анода 800 мА Приложение Б Микроскоп отсчетный МИР-2 Б.1 Основные технические данные и характеристики Увеличение, крат Пределы измерения, мм Окуляр Гюйгенса: Увеличение, крат Цена деления шкалы, мм Ахроматический объектив Увеличение, крат апертура Пределы шкалы выдвижного тубуса, мм Габаритные размеры, мм Вес, кг 19…33 От 0.015 до 6 7 0.1 3.7 0.11 От 130 до 90 134*67*34 0.29 Б.2 Назначение Отсчетный микроскоп МИР-2 – упрошенная модель измерительного микроскопа – предназначается для измерения мелких предметов и расстояний между штрихами, точками и другими неровностями поверхности. Применяется он главным образом в цеховых и заводских лабораториях, в отделах технического контроля и в учебных заведениях. Микроскоп имеет отсчетную окулярную шкалу. Микроскоп нормально работает в помещении с температурой от +10 0С до +400С и относительной влажности не более 80%. Б.3 Конструкция На рисунке Б.1 показан внешний вид измерительного микроскопа МИР-2 Рисунок Б.1 – Измерительный микроскоп МИР - 2 Микроскоп состоит из выдвижного тубуса 1, вставленного в корпус 2. На тубусе нанесены деления от 130 до 190 мм. В верхнюю часть тубуса вставлен окуляр Гюйгенса 3 с отчетной шкалой. В нижнюю часть корпуса ввинчен ахроматический объектив 4. Выдвижной тубус позволяет изменять расстояние между объективом и окуляром и тем самым изменять увеличение микроскопа. Увеличение при длине тубуса 160 мм – 29.5х, при длине тубуса 190 мм – 33х. На корпусе установлен хомутик 5, предназначенный для крепления микроскопа на универсальном штативе индикатора. Хомутик можно передвигать вдоль корпуса и закреплять в любом месте. Б.4 Методика работы Для удобства работы рекомендуется установить микроскоп на какой-либо штатив, например, на штатив индикатора. После фокусировки микроскопа на исследуемую поверхность следует найти в поле зрения две точки, расстояние между которыми необходимо измерить шкалой окуляра. Увеличение микроскопа изменяется при изменении расстояния между нижним и верхним срезами тубуса объектива и окуляра в пределах 130-190 мм; Соответственно будет меняться и цена деления шкалы окуляра. Зависимость цены деления окулярной шкалы от расстояния между объективом и окуляром определяется с помощью объект-микрометра. В результате повторных измерений эталона составлена таблица Б.1 примерных значений цены деления (а) шкалы окуляра в плоскости объекта. Таблица Б.1- Значения цены деления (а) шкалы окуляра в плоскости объекта Длина тубуса, мм 130 140 150 160 170 180 190 Цена деления (а) шкалы, мм 0.058 0.053 0.049 0.045 0.041 0.038 0.036 Для определения истинного расстояния Т между двумя точками или штрихами необходимо отсчитать число делений П шкалы окуляра, укладывающихся в этом расстоянии, затем умножить цену деления шкалы, соответствующей данной длине тубуса, на число делений шкалы окуляра Т=а*П (мм) Пример: Требуется определить расстояние между рисками от обработки инструментом на металлической пластинке. Для этого выдвижную часть тубуса следует установить, например, на деление «170» и установкой глазной линзы добиться резкой видимости шкалы. В таблице против длины тубуса 170 мм найти значение цены деления шкалы, в данном случае – 0.041 мм. Подвести начало шкалы окуляра к одной из рисок и подсчитать количество делений, уложившихся в расстоянии до следующей риски, т.е. найти значение П. Устанавливаем, что оно равно 4 делениям. Следовательно, искомое расстояние Т=а*П=0.041*4=0,164 мм. Цена деления шкалы окуляра микроскопа может быть определена с помощью объект-микрометра или какой-либо другой точной шкалы. Для этого перемещением глазной линзы окуляра нужно добиться резкого изображения его шкалы, и микроскоп сфокусировать на шкалу объект-микрометра, по шкале объект-микрометра взять какое-либо расстояние с определенным количеством делений и по шкале окуляра подсчитать, сколько ее делений укладывается в делениях объект-микрометра. Пример: Взять по шкале объект-микрометра 1 мм (100 делений); в этом расстоянии уложилось 21.5 делений шкалы окуляра. Тогда цена деления шкалы микроскопа а=1 /21.5=0,046 мм Цену деления шкалы окуляра рекомендуется определять при точных измерениях, т.к. фактическое ее значение для каждого данного микроскопа может несколько отличаться от табличного.