нагревательной установки
advertisement

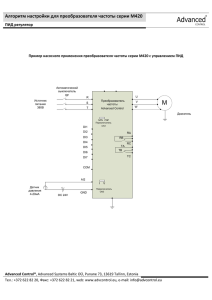
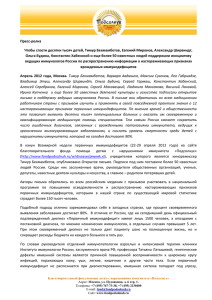
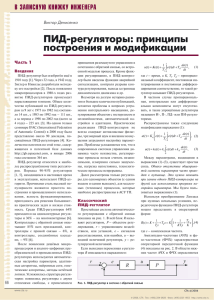
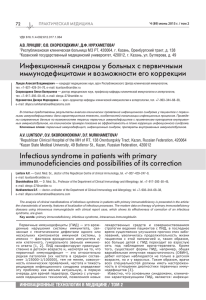
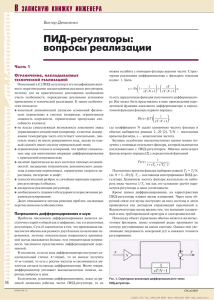
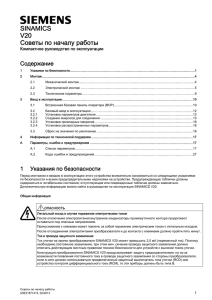
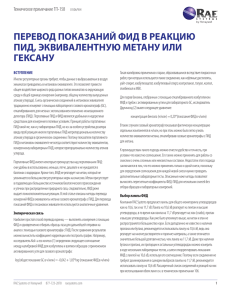
Пример сравнительных испытаний ПИД и USWO регуляторов на тепловом объекте. Описание испытательной установки. Конструкция нагревательной установки представлена на рисунке 1. Регулируемой величиной является температура металлического стержня (2). Для ее измерения используется термопара (3) стандартной градуировки (ХК). Исполнительным устройством (ИУ) служит реверсивный электродвигатель (РД), который через понижающий редуктор перемещает движок автотрансформатора (АТр). Напряжение с автотрансформатора подается на спираль электронагревателя (1), расположенного на металлическом стержне (2). Управление реверсивным двигателем осуществляется через электромагнитный пускатель (ЭП) подачей команд «больше-меньше» (Б/М). Рабочий диапазон перемещения ИУ ограничивается концевыми выключателями. Время полного хода ИУ равно 22 секундам. Исполнительное устройство оснащено датчиком положения (Д) с выходным сигналом Y(t) (420 мА). Сигнал от термопары 3 также преобразуется нормирующим преобразователем (НП) в унифицированный сигнал тока 420 мА (X(t)). Стенд рассчитан на подключение релейно-импульсных регуляторов (stepконтроллеров) стандартных модификаций с типовыми входными и выходными сигналами. Предусмотрена возможность изменять динамику объекта управления путем приближения/удаления электронагревателя (1) к точке измерения температуры металлического стержня (2). Измерительные и исполнительные элементы стенда обладают характерными изъянами своих промышленных аналогов (помехи в измерительных цепях, «выбеги» у ИУ, люфты в механических сочленениях, нелинейности и т.п.). Рис. 1. Конструкция нагревательной установки. 1 - электронагреватель, 2 - металлический стержень, 3 - термопара, НП нормирующий преобразователь, ЭП - электромагнитный пускатель, РД реверсивный двигатель, Атр – автотрансформатор, Д – датчик положения ИУ. О сравниваемых регуляторах. Для испытаний был выбран микропроцессорный ПИД-регулятор DR-19, выпускаемый известной корпорацией SIEMENS. USWO-регулятор реализован с помощью персонального компьютера (IBM), дополненного блоком ввода-вывода сигналов. В компьютер установлена программа USWO-закона управления. Параметры настройки USWO-регулятора определялись на основе экспериментально снятой кривой разгона объекта управления (ОУ), представленной на рисунке 4. Для определения параметров настройки ПИД-регулятора DR-19 была использована функция автонастройки. Результаты оказались следующими: Cp (Kn)=2,5; Tu (Ти)=908 c; Tv (Тд)=148 c; VV=5 (1) (VV - дополнительный параметр в ПИД-алгоритме от SIEMENS). Однако при этих настройках переходные процессы в замкнутой системе получились чрезмерно затянутыми по времени. Поэтому с помощью метода масштабирования были найдены другие ПИД-настройки Кр, Ти, Тд, при которых регулятор DR-19 смог заработать значительно эффективнее: Cp (Kn)=8,5; Tu (Ти)=300 c; Tv (Тд)=90 c; VV=5 (2) При испытаниях использовались настройки (2). Результаты сравнительных испытаний. Процессы на рисунке 2 позволяют сравнить качество работы ПИД и USWO регуляторов при выводе объекта управления из холодного состояния (≈20оС) на температуру, соответствующую заданию Xs = 25%. (Регулируемая величина X(t) везде указывается в % от полного диапазона измерения датчика ). Рис. 2. Процессы в замкнутых САР с ПИД и USWO регуляторами при выводе управляемого объекта из холодного состояния на задание (25 %). Если выбрать для регулируемой величины X(t) зону допусков, например, X = 0,5%, то можно указать время tp, за которое каждый регулятор решает поставленную задачу. У ПИД-регулятора продолжительность процесса составляет tp 1020 с. У USWO-регулятора время регулирования получается несколько меньше tр 630 с. На рисунке 2 видно, что ПИД-регулятор, хотя и немного, но «проигрывает» USWO по такому показателю, как величина допускаемых ошибок управления. Обратила на себя внимание неожиданно большая разница в количестве команд (Nu) на включение реверсивного двигателя, поданных сопоставляемыми регуляторами в ходе решения задачи. USWO – 22 включения, ПИД – 148 (!) включений. Это означает, что рабочий ресурс исполнительного устройства при USWO-управлении расходуется значительно экономнее. На рисунке 3 представлены переходные процессы в замкнутых системах с ПИД и USWO-регуляторами при действии на объект управления внешнего возмущения. Оно наносилось наложением на нагретый до задания стержень 2 холодной металлической массы “М” (с температурой 20 С). Масса помещалась на строго определенном расстоянии от точки измерения температуры стержня. Рис.3. Процессы в САР с ПИД и USWO регуляторами при наложении калиброванной массы М с начальной температурой 20 градусов (по Цельсию). По рисунку видно, как соотносятся традиционные показатели переходных процессов – время регулирования (tp) и допускаемые динамические ошибки управления е(t)=X(t)-Xs. ПИД-регулятор опять сделал больше переключений (Nu) исполнительного устройства, чем USWO. Регулируемая величина X, % 20 18 16 14 12 10 8 Время,c 6 0 400 800 1200 1600 2000 2400 2800 3200 Положение ИУ, % 50 40 30 20 Время,c 10 0 400 800 1200 1600 2000 2400 Рис.4. Переходная характеристика объекта управления (кривая разгона). 2800 3200