Гора Григорий Алексеевич РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ И АЛГОРИТМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СУДОВЫХ
advertisement

На правах рукописи
Гора Григорий Алексеевич
РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ И АЛГОРИТМА
МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СУДОВЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Специальность 05.13.06 – Автоматизация и управление
технологическими процессами и производствами
(кораблестроение) по техническим наукам
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Нижний Новгород – 2013 г.
Работа выполнена на кафедре «Информатики, систем управления и телекоммуникаций» Федерального государственного образовательного учреждения
высшего профессионального образования «Волжская государственная академия
водного транспорта».
Научный руководитель:
доктор технических наук, профессор
Чиркова Маргарита Макаровна
Официальные оппоненты:
Скороходов Дмитрий Алексеевич
доктор технических наук, профессор,
главный научный сотрудник Института
проблем транспорта им. Н. С. Соломенко
Российской академии наук, г. Санкт-Петербург
Гурылев Михаил Викторович
кандидат технических наук,
начальник электротехнического отдела
ООО « Проминжиниринг», г. Н. Новгород
Ведущая организация:
Нижегородский государственный технический
университет им. Р.Е. Алексеева, г. Н. Новгород
Защита диссертации состоится « 27 » декабря 2013 г. в 13 часов
в ауд. 281 на заседании диссертационного совета Д 223.001.02 Волжской
государственной академии водного транспорта по адресу: 603950,
г. Нижний Новгород, ул. Нестерова, 5а.
С диссертацией можно ознакомиться в библиотеке ФГОУ ВПО «ВГАВТ».
Автореферат разослан «____»___________2013г.
Ученый секретарь
диссертационного совета
кандидат технических наук, доцент
А.А. Кеслер
2
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Обеспечение технической безопасности плаванья судов осуществляется работой большого количества судовых систем и комплексов, к которым предъявляются
высокие требования по надежности. В связи с тем, что работа систем взаимосвязана, то сбой в
работе одной из них отражается на работе других. По опубликованным данным (Скороходов,
Д.А. Принципы построения системы информационной поддержки для принятия решений в
аварийных ситуациях / Д.А.Скороходов, А.Л.Стариченков // Морские интеллектуальные технологии. №1(3), 2009. – С. 35–39), “…около 15 % аварий на флоте являются следствием внезапного отказа судового оборудования”. Традиционная технология принятия управленческих
решений при возникновении нештатных ситуаций основывается на использовании документации на бумажных носителях, её объем и правила применения не обеспечивают оперативного проведения оценок процессов, которые должны быть выполнены с упреждением по отношению к результатам возникших нештатных ситуаций.
Современный уровень состояния вычислительной техники и компьютерных технологий
позволяет объединить ЭВМ, управляющие судовыми системами, в локальные сети. Это даст
возможность построить систему мониторинга технического состояния объектов, одной из задач которой может быть анализ возможного изменения работы одной контролируемой системы, в связи с нарушением работы другой.
Создание такой судовой локальной вычислительной сети и системы упреждающего мониторинга о протекающих процессах позволит снизить количество аварий.
На данный момент времени в различных областях деятельности подобными задачами занимаются: Пономарев А.А., Гаскаров В.Д., Абрамов О.В., Розенбаум А.Н., Кузякин В.И.,
Пименов М.Ю., Ефремов Л.В., и др. Существует достаточное количество систем, которые решают большой круг задач, в том числе контроля и прогнозирования технического состояния
устройства, но ни одна из них не учитывает взаимное влияния систем и не определяет место и
момент возникновения нештатной ситуации. Так, например, известна характерная особенность речных водоизмещающих судов – изменять свою характеристику управляемости при
выходе на мелководье (Поселенов Е.Н., Чиркова М.М. Выбор критерия для параметрической
оптимизации алгоритма управления объектом в условиях быстроменяющейся внешней среды. // Журнал университета водных коммуникаций. –2012. Вып. 1 (13). – С. 132–136). В этом
3
случае для достижения нужного эффекта углы перекладки рулей увеличиваются в разы. Если
одна из судовых систем – система энергоснабжения судна –по каким-либо причинам не обеспечивает необходимое напряжение в сети, то показатели качества работы другой системы –
движительно-рулевого комплекса – меняются, в частности может уменьшиться быстродействие и точность отработки положения руля. Совпадение во времени этих двух явлений – пониженное напряжение в сети и выход на мелководье, может привести к аварийной ситуации
при нормальном техническом состоянии систем.
Таким образом, создание системы мониторинга для оценки взаимного влияния объектов
одной или разных, но взаимосвязанных в работе систем и предсказания места, времени и возможного пути развития нештатной ситуации, возникшей на каком- либо объекте системы, является актуальной задачей.
Система мониторинга состоит из двух подсистем:
а) подсистемы сбора, обработки и кодирования информации для определения момента, места возникновения и типа нештатной ситуации;
б) экспертной подсистемой, прогнозирующей возможные отдаленные результаты возникшей ситуации.
В работе рассматривается задача создания 1-й подсистемы. Для решения второй задачи
необходимо иметь базу знаний, основанных на экспериментальных данных. Использование
математических моделей для формирования базы знаний нежелательно в связи со сложностью получения адекватных моделей для всех контролируемых объектов, внешняя среда
функционирования которых и соответственно их характеристики (уравнения динамики) меняются.
Цель и задачи диссертационной работы. Целью работы является повышение безопасности движения судна по заданной траектории за счет мониторинга технического состояния
взаимосвязанных в работе объектов и формировании информации о времени, месте и тенденции развития возникшей нештатной ситуации.
Для достижения поставленной цели необходимо решить следующие задачи.
1.
Разработать схему локальной сети с учетом судовой специфики – приоритетов контро-
лируемых объектов, позволит построить систему упреждающего мониторинга.
4
2. Разработать способ представления функциональной схемы контролируемой системы в
виде схемы информационного потока.
3. Составить информационная модель контролируемого объекта системы.
4. Разработать информационную модель системы в виде набора матриц, хранящих информацию о состоянии всех объектов системы за определенное время.
Объектом исследования являются взаимосвязанные в работе судовые устройства
(например, для системы электрогидравлического привода руля объектами исследования являются гидравлический двигатель, насос, датчики положений,
…).
Методы исследования. В работе использованы методы математического моделирования,
численные методы анализа Расчеты проводились на ПК, использовались как стандартные пакеты программ, так и программы собственной разработки.
Научная новизна работы состоит в следующих, выносимых на защиту результатах:
1. Введено понятия информационного пространства для управляемого технического объекта.
2. Функциональная схема системы взаимосвязанных в работе объектов заменена схемой
информационных потоков.
3. Информационная модель объектов контролируемой системы представлена в виде
функции связей.
4. Предложен способ кодирования состояния объектов контроля.
5. Введено понятия матрицы ситуационных кодов объекта.
6. Разработана методика представления состояния системы управления с использованием
ситуационных кодов.
Практическая ценность работы заключается в следующих положениях:
1. Разработана схема локальной сети с учетом судовой специфики – приоритетов контролируемых объектов, позволяющей построить систему упреждающего мониторинга.
2. Обоснован способ кодирования ситуаций на контролируемых объектах системы.
3. Разработана методика оценки информационного пространства вокруг контролируемого объекта, анализ которого позволит определить момент и место возникновения нештатных
ситуаций в системе автоматического управления приводом руля.
5
Обоснованность и достоверность результатов. Достоверность полученных результатов обеспечивается корректным применением методов математического моделирования с использованием данных натурных экспериментов. Программа мониторинга отлаживалась с использованием общепризнанных математических моделей элементов судовой системы рулевого привода.
Реализация и внедрение результатов работы. Результаты исследований представлены
для рассмотрения в Главное управление Российского Речного Регистра.
Апробация работы. Основные положения и результаты диссертационной работы докладывались и обсуждались на XI Международной конференции «Устойчивость и колебания нелинейных систем управления» (Москва, ИПУ РАН, 2012); на XXXVIII Всероссийской конференции по управлению движением корабля и специальных подводных аппаратов (Москва,
ИПУ РАН, 2012), на конгрессе международного научно-промышленного форума «Великие
реки’ 2012» (Н. Новгород, ВГАВТ, 2012), на конференции «Современные тенденции и перспективы развития водного транспорта» (г. Санкт-Петербург, СПГУВК, 2012), на научнопрактической конференции «Информационные управляющие системы и технологии» (Одесса, ОНМУ, 2012), на международной научно-технической конференции «Информационные
системы и технологии (ИСТ-2013)» (Н. Новгород, НГТУ, 2013), на XII Международной молодежной научно-техническая конференция «Будущее технической науки» (Н. Новгород,
НГТУ, 2013), на конгрессе Международного научно-промышленного форума «Великие реки’
2013» (Н. Новгород, ВГАВТ, 2013).
Публикации. Основные результаты диссертационных исследований отражены в 11 работах, опубликованных соискателем лично или в соавторстве в научных изданиях, в том числе в
двух статьях, представленных в Перечне рецензируемых научных журналов. Список публикаций приведен в конце автореферата.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения
и приложения; содержит 110 страниц текста, 18 рисунков, 9 таблиц и список литературы из 90
наименований.
СОДЕРЖАНИЕ РАБОТЫ
Во введении дается общая характеристика работы по созданию системы мониторинга для
получения упреждающей информации о нежелательном развитии ситуации в работе судовых
6
автоматических систем, обосновывается актуальность исследований, раскрывается научная
новизна и практическая значимость полученных результатов, приводятся сведения об их
апробации.
В первой главе рассматриваются вопросы построения структурной схемы локальной сети с
учетом судовой специфики и построения на её основе системы мониторинга работоспособности судовых автоматизированных систем.
Для создания системы мониторинга управляющие и контролирующие ЭВМ (или контроллеры) необходимо объединить в локальную сеть. Типовая схема организации сети
(рис. 1, а) не может быть рекомендована в связи со спецификой функционирования судна –
повышенными требованиями к надежности работы систем для обеспечения жизненной безопасности людей, сохранности и соблюдения сроков доставки груза. Структуру сети организуем с учетом приоритетности судовых систем (рис. 1, б, рис. 2).
Определим три уровня приоритетности систем.
Системы (судовые комплексы) высшего приоритета, к которым выставляются самые
жесткие требования на техническое состояние: движительный комплекс (рис. 2, система 1),
дизель-генераторная установка (система 2), рулевой привод (система 3). Отсутствие наблюдаемости за объектами систем высшего приоритета может привести к потере управляемости
судна, аварийным ситуациям, штрафным санкциям и, как следствие, к экономическим убыткам.
Судовая локальн ая сеть
Се р в е р н а я
ЭВМ
ЭВМ 1
Программа
мониторинга
ЭВМ 2
а
Объект
контроля 1
Объект
контроля 2
Объект
контроля n
7
С уд овая лок альн ая сеть
Серверная
ЭВМ
ЭВМ 1
ЭВМ 2
б
Контроллер 1
Контроллер 2
Контроллер
3
О т п р и е м о - п е р е д а ю щ и х м о д ул е й
систем разных приритетов
Рис. 1. Структурные схемы судовой локальной сети
Контроллер 1
Сбор и подготовка данных
П/П модуль 1
П/П модуль 2
П/П модуль 3
П/П модуль 4
П/П модуль 5
П/П модуль 6
Б
Система 1
В
дат-
обрабатываю-
А
Б
чиков
П/П модуль 1
П/П модуль 3
Система 3
Система 2
П/П модуль 2
П/П модуль 4
Система 4
для дальнейшей
Системы среднего приоритета
П/П модуль 1
Б
Система 1
П/П модуль 2
Система 2
П/П модуль 3
Система 3
Системы низшего приоритета
(А – длинная
вательная пере-
состоя-
системы с кон-
А
Б
Система 1
коммуникаци-
связующего
Контроллер 3
Контроллер 2
объектов
троллером, со-
Система 3
Системы высшего приоритета
качестве
элемента
ния
Система 2
бирающим
щим
и
данные
передачи их по
онному каналу
линия, последо-
Рис. 2. Схема сбора информации с учетом приоритетов.
дача
данных),
используем приемо-передающие модули (п/п модули 1–6), расположенные в непосредственной близости от объектов контроля. Связь датчиков с приемо-передающими модулями необходимо организовать по основному и резервирующему каналам (Б – короткая линия, параллельная передача данных). В случае выхода из строя основного канала система продолжит
функционирование.
Объекты среднего приоритета выполняют значимые функции системы, при выходе их
из строя системы высшего приоритета некоторое время сохраняют свою работоспособность.
8
Подключение к контроллеру может быть как непосредственным,
так и через каналы других
объектов сети.
Объекты низкого приоритета выполняют функции, не влияющие на работу систем более
высокого приоритета. Данные объекты могут подключаться магистральным способом через
каналы других объектов этого же приоритета. Резервирование канала не обязательно.
Учет приоритетности объекта дает структуру системы, представленную на рис. 1, б.
Выводы по главе 1
1. Разработана схема системы мониторинга, учитывающая судовую специфику. Данная
структура позволит обеспечить своевременное, бесперебойное получение необходимой информации о функционировании систем путем организации:
- дублирующего канала передачи информации от датчиков до приемо-передающего
устройства для объектов систем высшего приоритета;
- возможности передачи информации через канал связи другой системы этого же приоритета для объектов систем среднего приоритета;
- передачи информации через последовательно соединенные приемо-передающие модули без резервирования каналов для объектов систем низшего приоритета.
2. Данная структура судовой сети позволит:
- поднять частоту опроса датчиков более чем на порядок;
- выполнять часть задач мониторинга на контроллере;
- уменьшить расходы на каналы связи судовых систем с серверной ЭВМ. за счет увеличения числа «кротких» (Б) и уменьшения числа «длинных, коммуникационных» (А)
линий.
Во второй главе рассматривается методика перехода от функциональной схемы системы
управления к информационному пространству – пространству окружения управляемого объекта. Контроль состояния окружения позволит получить упреждающую информацию о возможном изменении работы системы.
Для решения задачи определения момента и места возникновения, а так же возможности распространения нештатной ситуации в системе управления предлагается новый способ представления системы в виде информационной модели. На примере системы электрогидравли9
ческого привода руля (рис. 3), состоящей из ряда контролируемых объектов, рассматривается методика перехода из предметной области (конкретных судовых объектов и их взаимосвязей) в информационное пространство – пространство состояний, записанных в виде кодов
и представленных в матричной форме.
F4
ОК5
F5
Электропривод
насоса
Сельсин
α
ОК0
сельсин Y0
F0
Y5
Y4
Насос
Электродвигатель
F3
ОК3
ОК4
Y3
δ
Гидравлический Y2
привод
ОК1
ОК 2
Y1
Сельсин
F1
Рис. 3. Функциональная схема привода руля:
Y i – координаты состояния i-того объекта системы, Fi – состояние внешней среды
(напряжение сети), α – заданный, δ – отработанный угол поворота руля.
Информационное пространство системы представляет собой набор матриц, хранящих результаты опроса датчиков состояний линий Yi. Fi за определенный промежуток времени и кодов состояний линий: матрица данных текущего опроса, матрицы состояний объектов систем
и итоговая матрица – матрица ситуационных кодов или кодов окружения конкретного объекта, состояние которого контролируется.
1. Матрица текущих опросов МТО(m) – одномерная матрица хранит результаты текущего опроса m входных линий и их производных.
время
Заголовки
Текущие
Матрица текущих опросов
Линии Y i
Таблица1
Линии Fi
t Y1 dY1/dt Y2 dY2/dt Y3 dY3/dt Y4 dY4/dt Y5 dY5/dt F1 F3 F4 F5
20 .5 .05 1.5 0.15 … … … … … … 220 … … …
10
значения
координат
Счетчик
позиций m
(1)
1
2
3
4
5
6
7
8
9
10
11
12
13 14 15
Обозначения: t – текущее время опроса; m – номер элемента матрицы; Y1 – F5 – текущие значения контролируемых параметров.
В программе мониторинга матрица текущих опросов описывается следующими данными:
– массив заголовков столбцов МТО$(15), хранит символьную информацию:
МТО$(1) = «t», МТО$(2) = «Y1», МТО$(3) = «dY1/dt», … ;
– массив данных текущих опросов МТО(m), хранит численные значения контролируемых
параметров: МТО(1) = 20 (текущее время), МТО(2) = 0.5 (значение координаты Y1), … .
2. Матрицы состояний объектов MСО(i, k, j) заполняются программой обработки текущих данных матрицы МТО(m) и представляют совокупность двумерных матриц, составленных для каждого i -го объекта системы (рис. 4). Матрицы описываются следующими параметрами: i – номер объекта, k – счетчик количества хранимых результатов опросов; j – счетчик столбцов матриц, хранящих информацию, определенную массивом заголовков. В примерах, рассмотренных в главе 4, imax = 5, kmax = 60, jmax = 17. Матрицы хранят информацию о значениях физических величин, зафиксированных датчиками в течение определенного времени.
Кроме этих данных в матрицу каждого объекта заносятся коды состояния его входных и выходных линий. Расчет этих кодов рассмотрен в следующей главе работы.
В программе мониторинга матрица состояния конкретного объекта i* описывается массивом заголовков столбцов МСО$(i*, j):
МСО$(i*, 1)= «t», МСО$(i*, 2)= «Y1», МСО$(i*, 3)= «dY1/dt», …
и массивом данных опросов и рассчитанных программой мониторинга кодов состояний
входных и выходных линий МСО(i, k, j).
11
k
i
60
59
0 1
j
2
Рис.4. Набор матриц состояний объектов системы – МСО(i, k, j)
Матрица состояния для ОК1
Выходная линия
I=1
Заголовки
k
j
t
Y1
1
2
dẎ 1/dt d 2Ÿ1/dt2
3
4
Код состояния объекта
1 (КСО1)
Входные линии
F1
dF1
Y2
5
6
7
dẎ 2/dt
8
Таблица2
Коды состояний линий
912
Коды окружения
объекта 1
(КОО1)
kY 1
kF1
kY 2
13
14
15 16-17
60
59
Матрица состояния для ОК2
Выходная линия
I=2
Заголовки
k
j
t
1
Y2
2
dẎ 2/dt d 2Ÿ2/dt2
3
4
Код состоя- Коды окружения
ния объекта 2 объекта 2 (КОО2)
(КСО2)
Входные линии
Y3
5
dẎ 3/dt
6
Y4
7
dẎ 4/dt
8
Таблица3
Коды состояний линий
912
kY 2
kY 3
kY 4
13
14
15 16-17
60
59
….
Для каждого объекта по данным МСО(i, k, j) составляется матрица ситуационных кодов –
кодов окружения объекта, анализ изменения которых позволит сделать предсказания дальнейшего его состояния.
12
3. Матрицы ситуационных кодов МСК (i, j, k, n), или кодов окружения объектов, –
следующий блок информационного пространства. Матрицы составляются для каждого объекта системы, и хранят данные о его внешнем окружении – кодах состояний как непосредственно, так и опосредованно с ним связанных объектов.
На первом этапе составления матриц ситуационных кодов для каждого объекта системы
(см. рис. 3) определим воздействия, непосредственно влияющие на его координаты состояния,
не указывая вид уравнений связи (математической модели) ( рис.5).
F1
Y1
Y2
Y0
Y1
Y3
Y5
F3
F5
Y5
Y3
F4 Y4
Y4
Y2
Y3
Рис.5. Координаты выходов и входов ОК
Модель связей или схему информационных потоков составим, используя данные
рис. 5. В качестве примера на рис. 6, 7 для ОК1 и ОК2 показаны два варианта модели
связи координат состояния (Y1 и Y2) с координатами состояния других объектов. Эти
модели определяют пути влияния на ОК1 и ОК2 как непосредственно, так и опосредовано с ним связанных в работе объектов. Пунктиром указаны обратные связи – выходная координата третьего объекта Y3 через ОК5 подается на его вход. Модель связей позволит составить информационную модель объекта в виде функции связи
(1) или (2).
Чем более опосредованно влияние, тем более дальнюю позицию занимает координата.
Y1 F1, Y2, Y4 , F4, Y3 , F3, Y0, F0, Y1, Y5, F5
F3
F0 Y0
Y1
F5
Y
5
Y3
(1)
F1
F4 Y4
Y1
Y2
Y3
13
Для координаты Y2 на рис. 7 представ-
Рис.6. Модель связей ОК1
с окружающей его средой (Y i), (Fi )
лен второй способ изображения модели
связей и информационной модели (2).
Информационная модель в этом случае примет вид
Y2 f Y3, [F3 ], Y 4[F 4 , Y 0( F 0), Y 1( F 1 ,Y 2), Y 5( F 5 , Y3 )]}
(2)
Такой способ записи позволяет более наглядно показать связь объектов всех уровней отдаленности .
Информационные модели будут использо-
Y2
ваться при организации матриц ситуационных
n1
Y4
кодов каждого объекта (МСК(i, j, k, n)). Данные
Y3
матриц фиксируют (в виде кодов) текущую об-
n2
F4
F3
Y5
Y0
Y1
становку на всех взаимосвязанных в работе
n3
F5
Y3
F1
объектах. Отслеживая изменение этих кодов во
F0
Y2
времени, можно следить за развитием процесРис. 7. Второй способ представления
сов в системе.
модели связей.
На основании (1) или (2) формируем матри-
n1 – 1-й уровень, ближайшее окружение,
цу ситуационных кодов МСК(i, k, j) –табл. 4 или
n2 – 2-й и n3 – 3-й уровень.
МСК(i, k, n, nj) –табл. 5.
В программе мониторинга матрица ситуационных кодов описывается массивом заголовков столбцов МСK$(i, n, j) и массивом МСK(i, k, n, j) – кодов состояний, перенесенных из
всех матриц МСО(i, k, j).
Матрица ситуационных кодов для ОК1
Таблица4
Коды состояний взаимосвязанных с ОК1
объектов Y i и линий F i
KCY i(t) и KCFi(t)
Заголовки
t
j
k
Y 1 F1 Y 2 Y 4 F4 Y 3 F3 Y 0 F0 Y 1 Y 5 F5 Y 3
1 2
3
4
5
6
7
8
9
10 11 12 13 14
Ситуационный код окружения ОК1
Код состояния
системы
15
60
22
0
0
1
1
0
1
0
0
0
0
0
0
0
0011010000000
59
21.5 1
1
1
1
0
1
0
1
0
1
0
0
1
111010101001
58
21.0 1
1
1
1
1
1
1
1
1
1
1
1
1
Уровни
0
Матрица ситуационных кодов для ОК2
1
2
111111111111
Таблица5
3
14
(n)
Заголовки t
nj
k
1
kY2
kY3
kY4
kF4
kF3
kY0
kY1
kY5
kF0
kF1
kY2
kF5
kY3
2…
1
2
1
2
3
4
5
1
2
3
4
5
60
22
1
1
1
0
0
0
0
0
0
0
1
0
0
59
58
21.5 1
21.0 1
1
1
1
1
0
1
0
1
1
1
1
1
1
1
0
1
0
1
1
1
0
1
1
1
Выводы по главе 2
1. Введение понятий информационной модели, матриц текущих опросов, матриц состояний и матриц ситуационных кодов объектов позволяет состояние системы представить в виде
кодового набора информации о протекающих в ней процессах.
2. Анализ изменения данных матрицы ситуационных кодов позволяет определить место
и время появления нештатной ситуации, возникшей на любом отдалении от контролируемого
объекта.
В третьей главе рассматривается методика переноса и принцип кодирования информации, основанный на анализе вторых производных координаты состояний. Такой анализ обоснован тем, что первая (в меньшей) и вторая производная (в большей степени) имеют перепады
значений, если закон изменения координаты состояния меняется.
В работе рассмотрена ситуация для минимального количества уровней состояний
d 2Y / dt 2 . Код состояния kY принимается за «1» – процесс развивается нормально, если значения второй производной измеряемой координаты не выходят за допустимые пределы:
{| d 2Y / dt 2 | } {kY 1} ,
(3)
в иных ситуациях:
{d 2Y / dt 2 } на предыдущем (k 1) - м
и
{d 2Y / dt 2 } на текущем k - м опросе {kY 0};
{d 2Y / dt 2 } на предыдущем (k 1) - м
(4)
и
{d 2Y / dt 2 } на текущем k - м опросе {kY 2},
(5)
где ε – экспериментально полученная величина максимального значения углового ускорения выходного вала в рабочем режиме. Эта величина для каждой контролируемой координаты является уникальной.
15
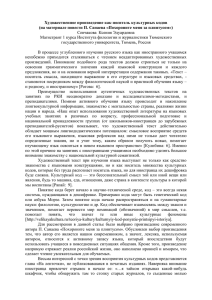
На рис. 8 представлен качественный вид осциллограмм для ситуации: понижения
напряжения сети.
Рис. 8. Качественный вид осциллограмм изменения координат состояния
После кодирования осуществляется распределение информации по матрицам.
Методика переноса информации после заполнения МТО основана на совпадении
имен столбцов матриц МТО, МСО, МСК.
1-я процедура: результаты текущего опроса заносятся в матрицу МТО, первая
строка которой является строкой имен столбцов матрицы.
Массив заголовков столбцов МТО(m):
МТО$(m)={t, Y1, dY 1dt, d2Y 1dt2 , Y 2, dY 2/dt, d2Y 2dt2, Y 3, dY 3/dt, d2Y 3dt2 , Y 4,… .
2-я процедура: перенос информации из МТО в матрицы состояний объектов, в строку текущего состояния, k = kmax.
Массив заголовков столбцов матриц состояний объектов:
МСО$(1, j)= {t, Y1, dY 1dt, d2Y 1/dt2, F1, dF1/dt, Y2, dY 2/dt, d2Y 2/dt2, 0, 0, 0, 0, kY1, kF1,,... .
МСО$(2, j)= {t, Y2, dY 2/ dt, d2Y 2/dt2 , Y 3, dY 3/dt, d2Y 3/dt2 , Y 4, dY 4/dt, d2Y4/dt2, 0, 0, 0, 0,… .
МСО$(3, j)=…, МСО$(4, j)=…, МСО$(5, j)=… .
Распределение информации по матрицам МСО(i, k, j) осуществляется следующим образом:
16
1) Последовательно (от m = 1 до m = mmax) из МТО(m) выбираем данные столбца, имя которого запоминаем МТО$(m*).
2) Последовательно для I = 1 до imax перебираем номера j заполняемых столбцов матрицы
МСО$(i, j), сравниваем МТО$(m*) с МСО$(i*, j*) при совпадении имён осуществляем перенос
данных, предварительно осуществляем сдвиг старых данных вниз:
If MTO$(m) = MCO$( i, j) then
МСО(i, k max-1, j) = МСО(i, k max , j)
MCO( i, k max, j)= MTO(m)
end if
Вторая часть матриц – «коды состояния линий» с j = 13–17 заполняется после анализа и кодирования данных всех матриц.
3-я процедура: перенос информации из МСО(i, k, j) в матрицу ситуационных кодов объектов МСК(i, k, j), при первом способе описания системы, или МСК(i, k, n, nj) при втором, многоуровневом, способе, осуществляется аналогичным образом.
Массив заголовков столбцов МСК$(i, n, nj):
МСК$(i, n, nj) = {t, kY2, kY3, kY4 , kF4 , kF3 , kY0 , kY1 , kY5 , kF0 , … .}.
При совпадении имен заголовков осуществляется процедура переноса кодов
If МСК$(i, n, nj) = MCO$(i, j) then
МСК(i, kmax, n,nj) = МСО(i, kmax, j)
end if
После заполнения текущей строки МСК код окружения контролируемого объекта сравнивается с предыдущим кодом и в случае ухудшения ситуации оба кода
(значения информационной функции) передаются в базу знаний для оценки развития процесса и возможных последствий. Примеры кодов МСК при понижении
напряжения сети даны в табл. 6, 7.
Первый способ представления информационного пространства Т а б л и ц а 6
Заголовки
k
60
59
58
57
j
t
1
21.5
21
20.5
20
Ситуационный код
Коды состояний взаимосвязанных с ОК1 объектов Yi и линий F i
окружения ОК1
Y 1 F 1 Y 2 Y 4 F 4 Y 3 F 3 Y 0 F 0 Y 1 Y 5 F 5 Y 3 Код состояния ОК1
2
3
4
5
6
7
8
9
10 11 12 13 14
15
1
0
1
1
0
1
0
1
0
1
1
0
1
1011010101101
2
0
2
2
0
0
0
0
0
2
2
0
0
2002000002200
0
0
0
0
0
2
0
0
0
0
0
0
2
0010020000002
1
1
1
1
1
1
1
1
1
1
1
1
1
1111111111111
Второй способ представления информационного пространства
Таблица7
17
Уровни (n)
Заголовки
nj
k
60
59
58
57
0
t
1
21.5
21.0
20.5
20.0
1
Y2
2…
1
2
0
1
Y3
1
1
2
2
1
Y4
2
1
2
0
1
F4
1
0
0
0
1
F3
2
0
0
0
1
2
Y0
3
1
0
0
1
Y1
4
1
2
0
1
Y5
5
1
2
0
1
F0
1
0
0
0
1
F1
2
0
0
0
1
3
Y2
3
1
1
0
1
F5
4
0
0
0
1
Y3
5
1
2
2
1
Значение информационной функции (2)
до t<20с Y2 f 1, [1], 1[1, 1(1, 1), 1(1,1), 1(1)]} . На следующем опросе фиксируются
изменения состояния на линиях, которые в дальнейшем развиваются по новому сценарию. Если код в столбце меняется по закону «111022011», или
«111200211», то состояние линии возвращается в исходное.
Выводы по главе 3
1. Анализ второй производной координаты состояния дает достоверную информацию о
протекающих процессах в системе.
2. Замена физических значений координат кодами позволяет значительно упростить процедуру определения момента и места возникновения нештатной ситуации в системе.
3. Каждой отклоненной от нормы последовательности кодов в базе знаний должна соответствовать определенная текстовая информация. Этот текст должен нести информацию о
состоянии объектов системы, времени, месте и причине возникших отклонений и о возможном направлении развития ситуации.
В четвертой главе рассматриваются примеры расчетов различных нештатных ситуаций,
оценивается возможность неоднозначной интерпретации ситуационных кодов, чувствительность метода, возможность оценки возврата в штатный режим, возможность оценки нештатной ситуации при отсутствии реакции объекта, но значительных удаленных последствиях.
Пример 1. Падение напряжения сети .
Моделирование данной ситуации на ЭВМ дало следующие зависимости:
18
Рис. 9. Уровень перепадов ускорений
при различных перепадах напряжения сети
Рис. 10. Изменение показателей работы привода
при различных перепадах напряжения сети
Падение напряжения сети на 5%.
Данные МТО(m)
T
Y0
Y1
dY1
d2Y1
Y2 d Y2 d2Y2
Y3
dY3 d2Y3
Y4
dY4
d2Y4
Y5
dY5
d2Y5
F1 F3 F4 F5
19.96 10. 1.48 0.06 -0.001 4.96 0.22 -0.01 4.41 -0.17 0.00 1.00 0.00 0.00 1.76 -0.07 0.00 1 1 1 1
19.98 10 1.49 0.06 -0.003 4.96 0.22 -0.01 4.40 -0.17 0.00 1.00 0.00 0.00 1.76 -0.07 0.00 0 0 0 0
20.00 10 1.4 -3.66 -186.46 4.97 0.22 -0.00 4.40 -0.16 0.44 0.95 -2.50 -125.00 1.67 -4.47 -220.12 1 1 1 1
20.02 10 1.41 0.06 186.13 4.97 0.20 -0.55 4.40 -0.06 5.41 0.95 0.00 125.00 1.67 -0.02 222.52 1 1 1 1
20.04 10 1.41 0.06 -0.003 4.98 0.20 -0.00 4.40 -0.06 -0.02 0.95 0.00 0.00 1.67 -0.02 -0.01 1 1 1 1
В приведенных данных отмечено поведение d2Yi / dt2 – уровни реакций – на возникшую ситуацию.
Данные матрицы ситуационных кодов для ОК1
Таблица8
Коды состояний взаимосвязанных с ОК1 объектов Yi иСитуационный код
окружения ОК1
и линий Fi
Заголовки
k
60
j
t
1
20.04
20.02
Y1
2
1
2
F1
3
1
1
Y2
4
1
0
Y4
5
1
2
F4
6
1
1
Y3
7
1
2
F3
8
1
1
Y0
9
1
2
F0
10
1
1
Y1
11
1
0
Y5
12
1
0
F5
13
1
1
Y3
14
1
2
Код состояния ОК1
15
1111111111111
2102121210012
19
59
58
57
20.0 0
19.98 1
19.96201
1
0
1
0
1
1
0
1
1
1
0
1
2
1
1
1
0
1
0
1
1
1
0
1
2
1
1
Y4
dY4
2
1
1
1
0
1
2
1
1
0100121012212
1011010101101
1111111111111
Пример 2. Падение оборотов насоса на 50%.
T
Y0
Y1
dY1
d2Y1
19.96
19.98
20.00
20.02
20.04
10
10
10
10
10
1.48
1.49
1.49
1.49
1.49
0.06
0.06
0.06
0.03
0.03
-0.00
-0.00
-0.00
-1.65
-0.00
Y2 d Y2 d2Y2
4.96
4.96
4.97
4.97
4.97
0.22
0.22
0.22
0.11
0.11
dY3 d2Y3
Y3
-0.01
-0.01
-0.00
-5.51
-0.00
4.41
4.40
4.40
4.40
4.39
-0.17
-0.17
-0.17
-0.17
-0.17
0.00
0.00
0.00
0.00
0.02
d2Y4
1.00 0.00 0.00
1.00 0.00 0.00
0.50 -25.00-1250.00
0.50 0.00 1250.00
0.50 0.00 0.00
Y5
dY5
d2Y5
F
1.76
1.76
1.76
1.76
1.75
-0.07
-0.07
-0.07
-0.07
-0.07
0.00
0.00
0.00
0.00
0.01
1
1
1
1
1
Пример 3. Падение оборотов насоса на 5%.
T
19.98
20.00
20.02
20.04
Y0
10
10
10
10
dY1
d2Y1
Y2
0.06
0.06
0.06
0.06
-0.00
-0.00
-0.16
-0.00
4.96
4.97
4.97
4.98
Y1
1.49
1.49
1.49
1.49
d Y2 d2Y2
dY3 d2Y3
Y3
0.22 -0.01 4.40 -0.17 0.00
0.22 -0.00 4.40 -0.17 0.00
0.20 -0.56 4.40 -0.17 0.00
0.20 -0.00 4.39 -0.17 0.00
d2Y4
Y4
dY4
Y5
1.00
0.95
0.95
0.95
0.00 0.002
-2.50 -125.00
0.00 125.00
0.00 0.001
d2Y5 F
dY5
1.76 -0.07 0.00
1.76 -0.07 0.00
1.76 -0.07 0.00
1.75 -0.07 0.00
1
1
1
1
Сравнение данных примеров 2, 3 показывает хорошую чувствительность метода кодирования
информации по изменению второй производной.
Пример 4 Падение оборотов насоса на 5% и возврат в исходное положение.
T
19.98
20.00
20.02
20.04
……
20.98
21.00
21.02
Y0
Y1
dY1
d2Y1
Y2
d Y2 d2Y2
10
10
10
10
1.49
1.49
1.49
1.49
0.06
0.06
0.06
0.06
-0.00
-0.00
-0.16
-0.00
4.96
4.97
4.97
4.98
0.22 -0.01 4.40 -0.17 0.00
0.22 -0.00 4.40 -0.17 0.00
0.20 -0.56 4.40 -0.17 0.00
0.20 -0.00 4.39 -0.17 0.00
10 1.55 0.06 -0.00 5.17 0.20 -0.00
10 1.55 0.06 -0.00 5.17 0.20 -0.00
10 1.55 0.06 0.15 5.18 0.21 0.52
dY3 d2Y3
Y3
4.23 -0.17 0.00
4.23 -0.17 0.00
4.22 -0.17 0.00
Y4
dY4
1.00
0.95
0.95
0.95
d2Y4
Y5
d2Y5
dY5
F
0.00 0.002 1.76 -0.07 0.00 1
-2.50 -125.00 1.76 -0.07 0.00 1
0.00 125.00 1.76 -0.07 0.00 1
0.00 0.001 1.75 -0.07 0.00 1
0.95 0.00 0.00 1.69 -0.06 0.00 1
1.00 2.50 125.00 1.69 -0.06 0.00 1
1.00 0.00 -125.00 1.69 -0.06 0.00 1
Метод фиксирует изменение и возврат системы в исходное положение.
Пример 5. Нарушение контактов датчика положения руля.
dt опроса = 0.02c, n = 1 – количество нарушений за 1 с
T
Y1
dY1
d2Y1
Y2
d Y2
d2Y2
Y3
dY3
d2Y3
Y4 dY4 d2Y4
Y5
dY5
d2Y5
20.06 0.00 0.00
0.00 4.98 0.22 0.04 4.47 0.85 -0.23 1 0.00 0.00 1.79 0.34 -0.09
20.08 1.49 74.85 3742.5 4.99 0.22 0.04 4.49 0.84 -0.23 1 0.00 0.00 1.79 0.33 -0.09
20.10 1.49 0.06 -3739.2 4.99 0.22 0.01 4.49 -0.20 -52.63 1 0.00 0.00 1.79 -0.08 -21.05
20.12 1.50 0.06
-0.00 4.99 0.22 -0.01 4.48 -0.20 0.01 1 0.00 0.00 1.79 -0.08 0.00
20.14 1.50 0.06
-0.00 5.00 0.22 -0.01 4.48 -0.20 0.01 1 0.00 0.00 1.79 -0.08 0.00
20.16 1.50 0.06
-0.00 5.00 0.22 -0.01 4.47 -0.20 0.01 1 0.00 0.00 1.79 -0.08 0.00
20.18 0.00 -75.12 -3759.4 5.01 0.22 -0.01 4.47 -0.20 0.01 1 0.00 0.00 1.79 -0.08 0.00
20.20 0.00 0.00 3756.0 5.01 0.22 0.01 4.49 0.84 52.64 1 0.00 0.00 1.79 0.33 21.05
20.22 0.00 0.00
0.00 5.02 0.22 0.04 4.50 0.84 -0.23 1 0.00 0.00 1.80 0.33 -0.09
Изменение динамики Y2(t) не фиксируются (признак d2Y2/dt2 ≈ 0), но показатели статического состояния значительно изменяются.
Пример 6. Обрыв канала обратной связи.
T
Y1
dY1
d2Y1
Y2
d Y2 d2Y2
Y3
dY3
d2Y3
Y4
dY4
d2Y4
Y5
dY5
d2Y5
20
19.98
20.00
20.02
20.04
20.06
1.49 0.06
-0.00
0.00 -74.51 -3729.20
0.00 0.00 3725.89
0.00 0.00
0.00
0.00 0.00
0.00
4.96
4.97
4.97
4.98
4.98
0.22 -0.01
0.22 -0.00
0.22 0.01
0.22 0.04
0.22 0.04
4.40
4.40
4.42
4.44
4.45
-0.17
-0.17
0.86
0.86
0.85
0.00
0.00
52.21
-0.24
-0.24
1.00 0.00 0.00
1.00 0.00 0.00
1.00 0.00 0.00
1.00 0.00 0.00
1.00 0.00 0.00
1.76 -0.07 0.00
1.76 -0.07 0.00
1.76 0.34 20.88
1.77 0.34 -0.09
1.78 0.34 -0.09
Анализ результатов 5-го и 6-го примеров показывает, что метод фиксирует ситуацию, когда
реакция объекта в ближайшее время отсутствует, но отдаленные последствия значительные.
Y2(t)
Y2(t)
Динамика процесса
Y2(t) при обрыве канала
обратной связи
Заданный уровень
Динамика процесса
Y2(t) при нарушении
контакта
сигнал с датчика
t*
t
Рис. 11. Динамика развития процесса при возникновении нештатных ситуаций
t
Коды различных нештатных ситуаций
Таблица9
Временная последовательность ситуационных кодов при
появлении нештатных ситуаций
Y2
{Y3 Y4 F4 F3 Y0 Y1 Y5 F0 F1 Y2 F5 Y3}
1
ПОНИЖЕНИЕ НАПРЯЖЕНИЯ
СЕТИ НА 5%
Y2
f{...}
ПАДЕНИЕ ОБОРОТОВ ПРИВОДА НАСОСА 50%
Y2
ПАДЕНИЕ ОБОРОТОВ ПРИВОДА НАСОСА 5%
Y2
НАРУШЕНИЕ КОНТАКТОВ
ДАТЧИКА ПОВОРОТА РУЛЯ
Y2
ОБРЫВ КАНАЛА ОБРАТНОЙ
СВЯЗИ
Y2
1
0
0
1
1
1
0
1
1
1
1
1
1
0
1
1
1
1
1
1
1
1
1
1
1
1
111111111111
110011101101
201100011012
221122211012
111111111111
111111111111
100111111111
121110111011
211111211112
211111211112
211111211112
111111111111
111111111111
100111111111
121110111011
111111111111
111111111111
111112111111
011110111110
111111111111
111111111111
111110111111
211112111112
111111111111
111111111111
111110111111
211112211112
21
НАРУШЕНИЕ РЕЖИМА РАБОТЫ И
ВОЗВРАТ В ИСХОДНОЕ СОСТОЯНИЕ
Y2
1 111111111111
1 111111111111
1 111110111111
1 211112211112
1 111111111111
………………….…
1 111112111111
1 011110011110
1 111111111111
Выводы по главе 4
1. Каждая нештатная ситуация, не приводящая или приводящая к изменению показателей
работы электрогидравлического привода руля, имеет различные наборы ситуационных кодов
и, таким образом, является определяемой. Неоднозначная интерпретация ситуаций исключена.
2. Метод чувствителен к малейшим отклонениям развития процесса от штатного.
3. Ситуация временного нарушения протекания процесса и возврата его в исходный режим определяется.
4. Определяются ситуации, когда реакция объекта отсутствует, несмотря на наличие неисправности в системе (нарушение контактов датчиков).
5. Определяется ситуации, когда при наличии неисправности в системе ближняя реакция
объекта отсутствует при значительных отдаленных последствиях (обрыв канала обратной связи).
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
Основным результатом диссертационной работы является решение некоторых задач создания системы мониторинга и прогнозирования работоспособности автоматических систем
управления судовым оборудованием.
1. Разработана структурная схема судовой локальной сети с учетом специфики функционирования судна – приоритетов контролируемых объектов. Схема обеспечивает высокую надежность получения информации и позволяет построить систему упреждающего мониторинга.
2. Разработан способ представления функциональной схемы контролируемой системы
управления в виде схемы информационного потока.
22
3. Предложен способ кодирования ситуаций на контролируемых объектах
системы по анализу изменения второй производной координаты состояния.
4. Введено понятие информационной модели объекта системы.
5. Введено понятие информационного пространства для технического объекта и разработана методика составления матрицы ситуационных кодов окружения объекта, анализ которой
позволяет определить момент, место и тип нештатной ситуации.
Таким образом, итогом проведенных исследований является создание механизма получения упреждающей информации о возможном развитии возникшей нештатной ситуации в
контролируемой системе, что позволит повысить техническую безопасность плавания судов.
СПИСОК ОПУБЛИКОВАННЫХ РАБОТ ПО ТЕМЕ ДИССЕРТАЦИИ
Публикации в рецензируемых изданиях, рекомендованных ВАК
1. Чиркова, М.М. Модель системы сбора и обработки данных для прогнозирования технического состояния привода руля судна / М.М. Чиркова, Г.А. Гора // Речной транспорт
(XXI век). – 2013. – № 5. – С. 71–75.
2. Гора, Г.А. Построение локальной сети для диспетчерской службы управления энергообъектами / Г.А. Гора // Журнал университета водных коммуникаций. – 2012.– Вып. 1
(13). – С. 31–34.
Публикации в журналах и сборниках научных трудов
3. Гора, Г.А. Принцип построения алгоритма контроля состояния объектов системы с переменной структурой / Г.А. Гора // Устойчивость и колебания в нелинейных системах
управления: тез. докл. XII Междунар. конф. – М., 2012. – С. 94.
4. Гора, Г.А. Организация архитектуры судовой локальной информационно-управляющей
сети / Г.А.Гора, Е.Н. Поселенов, А.В. Соловьев, М.М. Чиркова // Управление движением
корабля и специальных подводных аппаратов: материалы XXXVIII Всерос. конф. – Пос.
Номомихайловский, Краснодарский край. –2012. – С. 59–61.
23
5. Гора, Г.А. Организация информационно-управляющей системы на судне с учетом приоритета управляемых объектов / Г.А. Гора // Труды 14-го Междунар. науч.-промыш. форума «Великие реки-2012»: материалы науч.-метод. конф. профес.-препод. состава, аспир., спец-тов и студ. «Проблемы использования и инновационного развития внутренних водных путей в бассейнах великих рек». – Н. Новгород, 2012. – Т. 1. – С. 59–61.
6. Гора, Г.А. Использование информационных технологий в многоуровневых системах
управления / Г.А.Гора, И.И.Кочергин, Е.Н. Поселенов // Труды 14-го Междунар. науч.промыш. форума «Великие реки-2012»: материалы науч.-метод. конф. профес.-препод.
состава, аспир., спец-тов и студ. «Проблемы использования и инновационного развития
внутренних водных путей в бассейнах великих рек». – Н. Новгород,. 2012. – Т. 1. – 61–
63.
7. Гора, Г.А. Принципы организации информационно-управляющей системы на судах /
Г.А. Гора // Современные тенденции и перспективы развития водного транспорта России: материалы III межвуз. науч.-прак. конф. студ. и аспир. – СПб., 2012. – С. 236–240.
8. Гора, Г.А. О некоторых особенностях организации судовой локальной сети / Г.А. Гора //
«Iнформацiйнi управляючi системи та технолгоiï»: матерiали Всеукраïнскоï науковоïпрактичноï конференцiï, 17-18 жовтня 2012., Одесса. – Суми: ТОВ «Друкарський дiм
«Папiрус» . 2012. – С. 93–94.
9. Гора, Г.А. Об одном подходе к анализу и прогнозированию развития нештатных ситуаций в сложных технических системах / Г.А. Гора // Информационные системы и технологии ИСТ-2013: материалы XIX Междунар. науч.-техн. конф. – Н. Новгород, 2013. – С.
326.
10. Гора, Г.А. О некоторых задачах, решаемых судовой локальной вычислительной сетью /
Г.А. Гора, Е.Н. Поселенов, А.В. Соловьев, М.М. Чиркова // Информационные системы и
технологии ИСТ-2013: материалы XIX Междунар. науч.-техн. конф. – Н. Новгород,
2013. – С. 127.
11. Гора, Г.А. К вопросу расширения возможностей судовой локальной сети / Г.А. Гора,
Е.Н. Поселенов, А.В.Соловьев // Будущее технической науки: сб. матер. XII Междунар.
молодеж. науч.-техн. конф. – Н. Новгород, 2013. – С. 20–21.
24