Механическое движение
advertisement

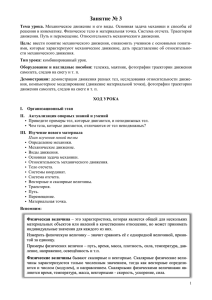
Механическое движение Механическое движение – это изменение положения тела в пространстве относительно других тел. Например, автомобиль движется по дороге. В автомобиле находятся люди. Люди движутся вместе с автомобилем по дороге. То есть люди перемещаются в пространстве относительно дороги. Но относительно самого автомобиля люди не движутся. В этом проявляется относительность механического движения. Далее кратко рассмотрим основные виды механического движения. Поступательное движение – это движение тела, при котором все его точки движутся одинаково. Например, всё тот же автомобиль совершает по дороге поступательное движение. Точнее, поступательное движение совершает только кузов автомобиля, в то время как его колёса совершают вращательное движение. Вращательное движение – это движение тела вокруг некоторой оси. При таком движении все точки тела совершают движение по окружностям, центром которых является эта ось. Упоминавшиеся нами колёса совершают вращательное движение вокруг своих осей, и в то же время колёса совершают поступательное движение вместе с кузовом автомобиля. То есть относительно оси колесо совершает вращательное движение, а относительно дороги – поступательное. Колебательное движение – это периодическое движение, совершается поочерёдно в двух противоположных направлениях. которое Например, колебательное движение совершает маятник в часах. Поступательное и вращательное движения – самые простые виды механического движения. Относительность механического движения Все тела во Вселенной движутся, поэтому не существует тел, которые находятся в абсолютном покое. По той же причине определить движется тело или нет, можно только относительно какого-либо другого тела. Например, автомобиль движется по дороге. Дорога находится на планете Земля. Дорога неподвижна. Поэтому можно измерить скорость автомобиля относительно неподвижной дороги. Но дорога неподвижна относительно Земли. Однако сама Земля вращается вокруг Солнца. Следовательно, дорога вместе с автомобилем также вращается вокруг Солнца. Следовательно, автомобиль совершает не только поступательное движение, но и вращательное (относительно Солнца). А вот относительно Земли автомобиль совершает только поступательное движение. В этом проявляется относительность механического движения. Относительность механического движения – это зависимость траектории движения тела, пройденного пути, перемещения и скорости от выбора системы отсчёта. Материальная точка Во многих случаях размером тела можно пренебречь, так как размеры этого тела малы по сравнению с расстоянием, которое походит это тело, или по сравнению с расстоянием между этим телом и другими телами. Такое тело для упрощения расчетов условно можно считать материальной точкой, имеющей массу этого тела. Материальная точка – это тело, размерами которого в данных условиях можно пренебречь. Многократно упоминавшийся нами автомобиль можно принять за материальную точку относительно Земли. Но если человек перемещается внутри этого автомобиля, то пренебрегать размерами автомобиля уже нельзя. Как правило, решая задачи по физике, рассматривают движение тела как движение материальной точки, и оперируют такими понятиями, как скорость материальной точки, ускорение материальной точки, импульс материальной точки, инерция материальной точки и т.п. Система отсчёта Материальная точка движется относительно других тел. Тело, по отношению к которому рассматривается данное механическое движение, называется телом отсчёта. Тело отсчёта выбирают произвольно в зависимости от решаемых задач. С телом отсчёта связывается система координат, которая представляет из себя точку отсчёта (начало координат). Система координат имеет 1, 2 или 3 оси в зависимости от условий движения. Положение точки на линии (1 ось), плоскости (2 оси) или в пространстве (3 оси) определяют соответственно одной, двумя или тремя координатами. Для определения положения тела в пространстве в любой момент времени также необходимо задать начало отсчёта времени. Система отсчёта – это система координат, тело отсчета, с которым связана система координат, и прибор для измерения времени. Относительно системы отсчёта и рассматривается движение тела. У одного и того же тела относительно разных тел отсчёта в разных системах координат могут быть совершенно различные координаты. Траектория движения также зависит от выбора системы отсчёта. Виды систем отсчёта могут быть различными, например, неподвижная система отсчёта, подвижная система отсчёта, инерциальная система отсчёта, неинерциальная система отсчёта. http://av-physics.narod.ru/mechanics/move.htm#01 Определение координат движущегося тела Для того, чтобы определить положение тела, которое совершило некоторое перемещение, можно графически приставить вектор перемещения к начальному положению тела. Но на практике часто встречаются задачи, в которых необходимо вычислить положение тела, то есть записать его координаты в некоторой системе координат. В этом случае вычисления будут производиться не с самим векторами, а с их проекциями на координатные оси и с их модулями. Эти величины, которые будут представлять собой некоторые числа, положительные или отрицательные, но не будут иметь направления. Рассмотрим следующую задачу: Необходимо определить координату движущегося тела, по известной начальной координате и известному вектору перемещения. Два катера двигаются по реке в противоположных направлениях. В 100 км от пристани П они встречаются. Продолжая движение, за некоторое время t первый катер переместился от места встречи на 60 км к востоку, второй переместился на это же время на 50 км к западу. Определить координаты катеров по отношению к пристани и расстояние между ними. Построим координатную ось Ох, параллельно прямой, вдоль которой двигаются катера. Начало оси х=0 совместим с пристанью. За положительное направление примем направление на восток. Спроецируем начала и концы векторов перемещений s1 и s2 на ось Ох, получим отрезки sx1 и sx2. Эти отрезки будут являться проекциями данных векторов. Проекция вектора на ось, будет положительной, если вектор сонаправлен с осью, и отрицательной, если вектор направлен в противоположную оси сторону. В нашем случае sx1 положительная проекция, а sx2 отрицательная проекция. Проекция вектора, будет равна разности координат конца и начала вектора. В нашем случае имеем: s1x = x1 - x0 sx2 = x2 - x0 Теперь выразим из этих уравнений координаты x1 и x2. Расстояние между двумя катерами будет равно модулю разности их координат, l = |x1 - x2|. Мы получили формулы для вычисления координат точек и расстояния между ними. Из условия задачи, катера встретились на расстоянии 100 км от пристани. х0 – точка встречи. Следовательно расстояние от х0 до пристани (начала координат) 100 км. х0 = 100 км. Так как мы выбрали ось Ох параллельно векторам перемещений катеров. Длины отрезков sx1 и sx2 будут равны длинам векторов s1 и s2. Модуль каждой проекции будет равен модулю соответствующего ей вектора. По условию у нас даны числа 50 км и 60 км, это и есть модули векторов соответствующий перемещений. sx1 =60 км sx2 = -50 км В итоге получаем, x1 =100+60 = 160 км x2 =100-50=50 км l=|160-50|=110 км Ответ: х1=160 км, х2=50 км, l =110 км http://uchebalegko.ru/lections/viewlection/fizika/9_klass/lec_opredelenie_koordinat_dvijuscheg osya_tela Инерциальные, Геоцентрическая, Гелиоцентрическая системы отсчета Объяснение причин механического движения в динамике основывается на использовании представлений о взаимодействии тел. Взаимодействие тел — это причина изменения скорости их движения, т. е. ускорения. Ускорение тела в данный момент времени определяется положением и движением окружающих тел. Системы отсчета в динамике. В кинематике все системы отсчета равноправны и одинаково допустимы. В динамике естественно попытаться выбрать систему отсчета таким образом, чтобы механическое движение в ней выглядело наиболее просто. Следуя историческому опыту человечества, начнем рассуждения в системе отсчета, связанной с Землей. Начиная с Аристотеля, на протяжении почти двадцати веков существовало предубеждение, что на Земле движение с постоянной скоростью нуждается для своего поддержания во внешнем воздействии, а при отсутствии такого воздействия движение прекращается, тело приходит в состояние покоя. Казалось бы, весь опыт наблюдений за происходящими вокруг нас движениями свидетельствует именно об этом. Понадобился гений Галилея и Ньютона, чтобы увидеть истинную, совершенно иную картину мира и осознать, что объяснения требует не движение с постоянной скоростью, а изменение скорости. Состояние движения с постоянной скоростью эквивалентно состоянию покоя в том смысле, что, как и покой, оно является естественным, не требующим никакого «объяснения», никакой причины. Иными словами, в состоянии покоя нет ничего исключительного. О том, насколько труден был этот шаг, можно судить хотя бы по тому факту, что Галилей сделал его лишь наполовину: он считал, что прямолинейное движение сохраняется только в земных масштабах, а для небесных тел «естественным», сохраняющимся движением является круговое. Движение по инерции. Движение тела, происходящее без внешних воздействий, принято называть движением по инерции. В земных условиях такие движения практически не встречаются. К представлению о движении по инерции можно прийти в результате экстраполяции к идеализированным условиям. Представим себе, например, скольжение льдинки по горизонтальной поверхности. Если эта поверхность шероховатая, как асфальт, запущенная по ней льдинка довольно быстро остановится. Но в гололед, когда поверхность асфальта покрыта тонким слоем льда, скольжение льдинки будет продолжаться гораздо дольше. Можно думать, что в предельном случае идеально гладкой поверхности такое движение продолжалось бы неограниченно долго. В школьном кабинете физики почти идеальные условия движения по инерции можно осуществить с помощью «воздушной дорожки», где трение о поверхность почти отсутствует (рис. 61). Выходящий из маленьких отверстий сжатый воздух создает «воздушную подушку», поддерживающую тележку-бегунок, и после легкого толчка тележка долго движется с неизменной по модулю скоростью, упруго отражаясь от концов дорожки с помощью пружинных бамперов. Таким образом, создастся впечатление, что в отсутствие внешних воздействий тело сохраняет состояние покоя или движения с постоянной скоростью. Посмотрим теперь, что получится, если опыт с воздушной дорожкой проделать в вагоне движущегося поезда. Оказывается, что при равномерном прямолинейном движении поезда относительно Земли все происходит точно так же, как и в кабинете физики. Однако при разгоне поезда, торможении, движении по закруглению и при тряске на неровностях пути все происходит иначе. Например, при трогании поезда с места тележка на установленной вдоль вагона дорожке сама приходит в движение относительно вагона в противоположную сторону. Тем не менее, для наблюдателя, стоящего на платформе, тележка как была, так и останется на месте, просто дорожка под ней придет в движение вместе с вагоном. При торможении поезда стоявшая неподвижно на воздушной дорожке тележка устремится вперед. Однако для наблюдателя на платформе при торможении поезда тележка продолжает двигаться прямолинейно и равномерно с прежней скоростью. И так далее. Какой же вывод отсюда следует? Очевидно, что связанная с равномерно и прямолинейно движущимся поездом система отсчета столь же удобна, как и связанная с Землей. Как в той, так и в другой системе отсчета тело в отсутствие внешних взаимодействий либо покоится, либо движется с постоянной скоростью. При ускоренном движении системы отсчета тело уже не сохраняет состояния покоя или равномерного движения. Скорость тела изменяется даже тогда, когда на него не действуют другие тела, т. е. «беспричинно». Инерциальные системы отсчета. Таким образом, в динамике пропадает равноправие, эквивалентность всех систем отсчета. В произвольной системе отсчета изменение скорости тела может происходить без взаимодействия с другими телами. Системы отсчета, в которых тело, не взаимодействующее с другими телами, сохраняет состояние покоя или равномерного прямолинейного движения, называются инерциальными. В рассмотренных примерах система отсчета, связанная с Землей, и система отсчета, связанная с равномерно и прямолинейно движущимся поездом, могут приближенно считаться инерциальными, в отличие от системы отсчета, связанной с ускоренно движущимся поездом. Итак, введение инерциальной системы отсчета основано на использовании представления о свободном теле. Но как можно убедиться в том, что тело действительно свободно, т. е. не взаимодействует ни с какими другими телами? Все известные в физике взаимодействия между макроскопическими телами, например такие, как силы тяготения или силы электромагнитного взаимодействия, убывают с увеличением расстояния. Поэтому можно считать, что тело, достаточно удаленное от других тел, практически не испытывает воздействия с их стороны, т. е. является свободным. Реально, как мы видели, условия свободного движения могут выполняться лишь приближенно, с большей или меньшей точностью. Отсюда ясно, что невозможно осуществить такой опыт, который можно было бы считать прямым строгим доказательством существования инерциальных систем отсчета. Геоцентрическая и гелиоцентрическая системы отсчета. Какие же системы отсчета можно считать инерциальными? Во многих практически важных случаях инерциальной можно считать систему отсчета, связанную с Землей, — так называемую геоцентрическую систему отсчета. Но строго инерциальной она не является, о чем свидетельствуют хорошо известные опыты с маятником Фуко и с отклонением свободно падающих тел от вертикали. С гораздо большей степенью точности можно считать инерциальной гелиоцентрическую систему отсчета, связанную с Солнцем и «неподвижными» звездами. Любая система отсчета, которая движется относительно инерциальной с постоянной по модулю и направлению скоростью, тоже является инерциальной. Система отсчета, движущаяся относительно гелиоцентрической с ускорением, в частности вращающаяся, уже не будет инерциальной. Иррациональность геоцентрической системы отсчета связана главным образом с суточным вращением Земли вокруг своей оси. http://natalibrilenova.ru/blog/inercija_pervyj_zakon_njutona_svobodnoe_telo_iner cialnye_geocentricheskaja_geliocentricheskaja_sistemy_otscheta/2012-09-12-417 «Движение и устройство эскалатора метро» Эскалатор метро… Как много в этих словах скрыто для любого интересующегося человека! Огромная, постоянно движущаяся махина, «живая лестница»… А начиналось всё ещё в конце XIX века, когда американский изобретатель Дж. Рено (Jesse W. Reno, 1861—1947) запатентовал первую «живую лестницу». В его конструкции вместо ступенек на «бесконечной» ленте её лестничного полотна были продольные рифли. Первый же публичный действующий эскалатор по соглашению с его изобретателем Ч. Зеебергером (Charles D. Seeberger, 1857—1931) был изготовлен компанией «Отис» и экспонирован на Парижской выставке 1900 года. У него были горизонтальные ступени, которые выходили из-под ограждения на одной входной площадке и уходили под такое же ограждение на другой входной площадке, что доставляло массу проблем. В 1921 году обе идеи — горизонтальные ступеньки и рифление — были объединены в новой конструкции, и с этого момента всегда стала использоваться подобная схема. Когда в 1930-х годах начали проектировать первый в нашей стране московский метрополитен, была предпринята попытка ознакомиться с заграничным опытом. Однако запрашиваемые суммы и время на исполнение со стороны зарубежных компаний были настолько велики, что от этой идеи пришлось отказаться. В конце 1933 года директор лондонского отделения фирмы «Отис» писал председателю Моссовета: «Ваши специалисты — способный народ. Но эскалаторы — чрезвычайно сложное дело, им с этим делом не справиться. Даже мы, с нашим тридцатилетним опытом, не возьмёмся выполнить заказ в такие сроки. Я, как друг Советского Союза, обязан вас предупредить, что сроки пуска метро могут быть сорваны». Но советские инженеры и учёные сумели решить эту уникальную задачу, и в феврале 1935 года эскалаторы стали доставлять пассажиров на станции московского метрополитена. Одним из важных элементов эскалатора является ступенька. У неё четыре ролика: два больших и два маленьких. Большие ролики едут по своим направляющим рельсам, а маленькие — по своим. Когда проектировали эскалатор, даже подбор материалов для роликов был очень важной и трудной задачей. Московский метрополитен открыт примерно с шести утра до часу ночи. Т. е. больше 19 часов — больше 68 тысяч секунд в день. Самая медленная скорость эксплуатации эскалатора сейчас 0,75 м/c, и, значит, ступенька пробегает каждый день больше 50 километров. И так, без устали, день за днём, в год более 18 тысяч километров! Представляете, каков должен быть материал, чтобы ролики без регулярных ремонтов и замен могли выдерживать постоянно едущих на ступеньках пассажиров. И это только одна деталь и один вопрос, который пришлось решать советским инженерам, а таких вопросов были тысячи. Вот так примерно выглядит схема эскалатора. Если посмотреть сбоку, то видно, что именно взаимное расположение направляющих рельс больших и маленьких роликов обеспечивает основное свойство эскалатора: в верхней части «живой лестницы», по которой едут пассажиры, ступени всегда горизонтальны. В нижней же части ступени возвращаются вверх параллельно направляющим, не занимая место в туннеле. Но вернёмся к нашему вопросу о глубине, на которую спускается эскалатор. Удивительный факт состоит в том, что все российские эскалаторы, с самых первых и до производимых в наше время, наклонены к горизонту под углом в 30 градусов! Достроим мысленно эскалатор до естественного прямоугольного треугольника. Длина его гипотенузы — это длина эскалатора, а длина одного из катетов и будет примерно равна глубине заложения той станции метро, на которую ведёт этот эскалатор. Как же посчитать длину эскалатора, спускаясь по нему? Можно было бы засечь время, но тогда для вычисления пути нужно точно знать скорость движения, а она может меняться от 0,75 м/c до 1 м/c, и погрешность — в четверть — довольно большая. Можно было бы посчитать размеры одной ступеньки, но затем понять на движущемся эскалаторе, сколько на гипотенузе умещается ступенек, сложновато… Что же мы можем использовать ещё? Спускаясь или поднимаясь по эскалатору, мы постоянно проезжаем фонари! Расстояние между ними не фиксируется, ГОСТами оговаривается необходимая освещённость туннеля. И в итоге получается, что фонари отстоят друг от друга примерно на 5 метров. Спускаясь по эскалатору, можно посчитать количество фонарей. Что нужно сделать дальше, чтобы посчитать длину гипотенузы? Не торопитесь умножать на 5. Для подсчёта длины нам же нужно не количество фонарей, а количество расстояний между ними! От подсчитанного количества фонарей следует отнять 1, а теперь уже можно умножить на 5 и на синус 30°. Красота момента состоит в том, что синус 30° равен 1/2, и с этим числом легко производить счёт в уме! И получившаяся формула подсчёта глубины заложения станции проста для счёта и легка для запоминания. http://www.etudes.ru/ru/etudes/metro/ Относительность механического движения Всякое движение относительно. Относительно разных систем отсчета одно и то же тело может как двигаться, так и покоиться одновременно. Например, ученик, сидящий за школьной партой, покоится относительно парты, но движется относительно Солнца. Траектория движения тела так же может быть различной относительно разных тел отсчета. Например, точка на конце лопасти вертолета, взлетающего с земли, для пилота описывает окружность, а для наблюдателя на Земле – винтовую линию. В задачах на относительность движения часто используется правило сложения скоростей: Скорость тела относительно неподвижной системы отсчета V равна векторной сумме скоростей тела в подвижной системе отсчета Vо и скорости самой подвижной системы отсчета Vп: Это правило применимо только для скоростей, значительно меньших скорости света в вакууме (т. е. к скоростям порядка 106 м/с и меньше). Например, если человек идет по движущемуся эскалатору, то его скорость относительно земли равна векторной сумме скоростей самого человека и эскалатора. Если эскалатор и человек движутся в одном направлении, то V=V0+Vп, если в разных – то закон сложения скоростей имеет вид: V=V0-Vп Если в подвижной системе отсчета, движущейся со скоростью Vп относительно неподвижной системы (горизонтально), тело станет двигаться со скоростью V0 перпендикулярно к направлению ее движения, то для определения модуля скорости тела относительно неподвижной системы необходимо воспользоваться теоремой Пифагора. Vп V0 V Если необходимо найти скорость одного движущегося тела относительно второго, то применяют формулу: V12=V1-V2 Например, если два автомобиля едут по параллельным дорогам навстречу друг другу со скоростями 36 км/ч и 54 км/ч относительно остановки, то скорость первого автобуса относительно второго равна 36 – (-54)=36+54=110 км/ч (Скорость сближения) А если они движутся параллельно друг другу в одном направлении (тот у которого скорость больше обгоняет первый), то скорость первого поезда относительно второго: 72-36=36 км/ч А скорость второго автобуса относительно первого равна: 36-72=-36 км/ч Иногда в задачах необходимо найти скорость оного движущегося тела относительно другого, если векторы их скоростей расположены под углом α друг к другу. Тогда, чтобы найти скорость первого тела относительно второго, надо найти разность векторов V2 – V1 V1 V2-V1 V2 А чтобы найти скорость второго тела относительно первого, надо найти разность векторов V1-V2 V1 V1- V2 V2 Для нахождения модуля скорости в двух последних случаях можно применить теорему косинусов.