Способы расчета эллиптических и радиальных погрешностей
advertisement

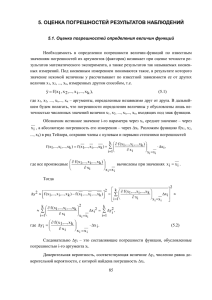
Способы расчета эллиптических и радиальных погрешностей навигационных обсерваций. Контроль за безопасным плаванием судна по маршруту, заданному предварительной прокладкой, осуществляется путем непрерывного ведения исполнительной прокладки Исполнительная прокладка заключается в счислении пути судна, определении места, периодической коррекции обсервациями счисления пути, нанесении на карту линии пути судна. В процессе ведения исполнительной прокладки одновременно решаются задачи: определение текущего места судна относительно предварительной прокладки и навигационных опасностей регистрация (документация) текущего места судна 1. Погрешности навигационных изолиний Вероятнейший результат измерений навигационного параметра, исправленный поправками является обсервованным. Каждому обсервованному навигационному параметру соответствует своя навигационная изолиния или ее спрямленный (в районе счисленной или расчетной точки) участок – линия положения. Известно, что линия положения характеризуется следующим уравнением (в нормальном виде): cos sin n (1) Здесь и – поправки к координатам счислимой (расчетной) точки для получения обсервованного места (в минутах широты); – направление градиента навигационного параметра относительно северной части географического меридиана n – перенос линии положения – кратчайшее расстояние между счислимой (расчетной) точкой С (рис.1) и линией положения u uC n 0 (2) g где u 0 и u С – обсервованный и счислимый (расчетный) навигационный параметры; g – модуль градиента навигационного параметра. g лп n К лп Рис. 1. Изолиния и линия положения. При наличии погрешности u в обсервованном навигационном параметре линия положения сместится параллельно самой себе на какую-то величину n ЛП , т.е. изменится величина переноса. Величина смещения линии положения ЛП , обусловленная неточностью навигационного параметра, называется погрешностью линии положения (навигационной изолинии). Для определения ее численного значения необходимо продифференцировать выражение и перейти к конечным приращениям (2): n ЛП U (3). Отсюда следует, что погрешность в линии положения зависит не только от величины u , но и от градиента g: при данной погрешности u ошибка в линии положения тем больше, чем меньше величина градиента. Но последняя зависит от положения судна относительно ориентира, следовательно, градиент характеризует зависимость погрешности линии положения от геометрического фактора. Значения градиентов различных навигационных параметров приведены в таблице 1. Навигационный Модуль градиента Направление градиента параметр Пеленг с судна на ИП - 90 57.3 град ориентир D мили Расстояние до ориентира 1 ИП 180 Горизонтальный угол 3438 d минут D1 sin ИП arctg 90 1 D1 cos D 2 D1 D2 мили Высота светила Di – расстояния до ориентиров d – расстояние между ориентирами – горизонтальный угол А – азимут светила 1 Формулу (3) можно переписать так: ед. параметра g u ЛП ед. длина (4) Отсюда видно, что модуль градиента навигационного параметра определяет изменение навигационного параметра при смещении линии положения по нормам на одну единицу длины. Средняя квадратическая погрешность линии положения определяется по правилу (3) после замены погрешностей на их средние квадратические значений m (5) m ЛП u g Средняя квадратическая погрешность линии положения в отличие от погрешности навигационного параметра имеет направление – она перпендикулярна линии положения и, поскольку равновероятен любой ее знак, то перпендикуляры, равные m ЛП , проводятся во взаимно противоположные стороны (рис.2). а ЛП mлп l в О ml ml mлп Рис. 2. Погрешность линии положения l Истинная (безошибочная) линия положения находится в полосе шириной 2m ЛП c вероятностью 0,683. При этом имеется ввиду полоса, осью которой является обсервованная линия положения. Ширина полосы, в которой находится безошибочная линия положения с заданной вероятностью Р, рассчитывается по формуле: (6) Н 2 z mЛП где Z – вероятностный коэффициент, определяемый по таблице функции Лапласа (таблица 4.7, МТ – 2000) Линии положения являются равноточными, если одинаковы их средние квадратические погрешности. В противном случае они неравноточные и тогда им приписывается вес Р ЛН 1 g2 (7) 2 m ЛП mu2 Отсюда следует, что даже при равноточных навигационных параметрах линии положения в общем случае являются неравноточными из-за различия их градиентов. Средняя квадратическая погрешность m l линии положения по заданному направлению ll (см. рис. 2) называется векториальной. Из треугольника Оав ml mЛП sin (8) где – угол между линией положения и заданным направлением. При 90 m l всегда больше m ЛП , т.е. средняя квадратическая погрешность линии положения является минимальной векториальной погрешностью. Если рассматривать две линии положения, пересекающиеся под углом (рис. 3), то векториальные погрешности одной линии положения по направлению другой на основании формулы (8) будут равны ml 2 m ЛП 2 sin ml1 m ЛП1 sin (9) Р ЛН g2 ЛП1 mлп1 mлп2 ml2 ml1 ЛП2 ml1 ml2 g1 Проведя градиенты линий положения можно написать соотношения между углом и углом Рис. 3. Векториальные погрешности. между градиентами. 180 ; ; 90 90 Источником сведений о погрешностях основных навигационных параметров в настоящее время являются таблица 4.3 «Среднестатические погрешности основных навигациооных параметров» и таблица 4.4 «Среднестатические погрешности основных элементов счисления» мореходных таблиц МТ – 2000 (стр. 392-394). Для расчета средней квадратической погрешности линии положения рекомендуется выбирать среднюю квадратическую величину полной погрешности параметра ( m П в МТ – 2000). 2. Расчет эллипса погрешностей при обсервациях по двум линиям положения. Случайные погрешности навигационных параметров вызывают случайные смещения навигационных изолиний (линий положения). В результате обсервованное место оказывается смещенным относительно истинного по случайному направлению и на случайную величину. Предсказать случайную векторную погрешность места невозможно. Поэтому погрешность места учитывается в вероятностном смысле в виде указания площади, в пределах которой находится истинное место судна с определенной вероятностью. В теории вероятностей показывается, что при нормальном распределении точек на плоскости, истинная безошибочная точка с некоторой вероятностью находится в пределах площади эллипса соответствующих размеров, проведенного относительно наиболее вероятного места этой точки. При оценке точности места судна за центр эллипса принимают обсервованное или, в общем случае, вероятнейшее место судна. Эллипсов подобных друг другу можно провести бесконечное множество, и каждому из них соответствует своя вероятность невыхода истинного места судна за пределы данного эллипса (рис. 4). Чем больше размеры эллипса, тем Э3 выше вероятность нахождения Э2 безошибочного места в пределах этой Э1 площади. Так как эллипсы рассеивания характеризуют возможные ошибки места, то их называют эллипсами Р1 погрешностей. Р2 Р3 Рис. 4. Эллипсы погрешностей Средний квадратический эллипс погрешностей (СКЭ, ЭСКП, Эм) – это эллипс с полуосями а и в, равными средней квадратической погрешности места по данным направлениям Та и Тв= Та 90 и вероятностью нахождения судна в нем Р = 0,393. При а = в СКЭ превращается в круг погрешностей (в круговую погрешность) радиуса r = а = в и вероятностью Р = 0,393. Эллипс погрешностей Эр заданной вероятности Р имеет полуоси аР = Са и вР = Св, где С – коэффициент, выбираемый из таблицы 4.12 МТ – 2000. Предельный эллипс погрешностей Э̂ – эллипс, в пределах которого находится судно с вероятностью Р 0,95. Если для Э̂ вероятность не указана, то она считается равной Р = 0,95, а полуоси а а̂ = 2,45a и в̂ = 2,45в. в Рис. 5. Средний квадратический эллипс Таблица 4.12 МТ – 2000 служит для определения вероятности нахождения судна в пределах эллипса погрешностей заданных размеров. Она рассчитана по формуле: Р 1 е С2 2 (10) а Р вР – коэффициент равный отношению полуосей аР и вР – заданного а в эллипса Эр к одноименным полуосям а и в среднего квадратического эллипса погрешностей Эm. Значение вероятностей Р выбирается из таблицы 4.12 по коэффициенту С. При решении обратной задачи полуоси эллипса погрешностей Эр, внутри которого место судна находится с заданной вероятностью Рзад, вычисляется по формулам аР=Са и вР=Св (11) где С – коэффициент, выбираемый из таблицы 4.12. по заданной вероятности Рзад. Для расчета среднего квадратического эллипса погрешностей в штурманской практике применяется таблица 4.11 МТ – 2000 «Оценка точности места по двум линиям положения», ранее применялось приложение 5 к МТ – 75. В таблице даны коэффициенты Ка, Кв и угол для определения элементов среднего квадратического эллипса погрешностей (СКЭ, ЭСКП), а так же коэффициент Км для расчета радиальной средней квадратической погрешности (РСКП) места по двум линиям положения. Аргументами для входа в таблицу являются: априорное значение коэффициента взаимной корреляции r линий положения (навигационных параметров) в пределах от 0 до 1 с интервалом 0,2; при независимых линиях положения или при отсутствии данных обеих корреляций в таблицу входят с r = 0; mЛП1 коэффициент 1 в пределах от 0,0 до 1,0 с интервалом 0,1, где mЛП 2 где с m ЛП1 – полная СКП более точной линии положения, а m ЛП 2 – полная СКП менее точной линии положения ( m ЛП1 m ЛП 2 ); предварительно m ЛП1 и m ЛП 2 должны быть рассчитаны по известной формуле угол = 2 – 1 между направлениями градиентов линий положения в пределах от 20 до 160 с интервалом 10. Коэффициенты Ка и Кв служат для расчета полуосей среднего квадратического эллипса погрешностей: а К а m ЛП1 ; в К в m ЛП1 . Направление большой оси эллипса погрешностей фиксирует угол , который всегда откладывается от более точной линии положения. Модуль положительного угла откладывается внутрь угла между линиями положения, равного (рис. 6). Модуль отрицательного угла откладывается внутрь угла между линиями положения, равного 180 – . Если = 90 и r 0, то за угол между линиями положения принимается тот, который образован направлениями 1 – 90 и 2 – 90 или направлениями 1 + 90 и 2 + 90. Коэффициент Км служит для расчета РСКП места: М К м m ЛП1 (11) g1 g2 ЛП2 + ЛП1 - 180– Рис. 6. Определение положения большой оси эллипса Пример 1. Место судна получено по двум взаимонезависимым линиям положения (r = 0). Направления градиентов линий положения 1 = 170 2 = 40. СКП линий положения m ЛИ1 0,6 мили и m ЛИ1 1,2 мили . Определить эллиптическую и радиальную средние квадратические погрешности места. Решение. 0,6 1) по r = 0 0,54 и = 2 – 1 = 40 – 170=130 из таблицы 4.11а 1,2 МТ – 2000 выбираем Ка=2,8, Кв=0,9, Км=2,9 и = –7 2) Вычисляем элементы среднего квадратического эллипса погрешностей: а К а m ЛИ1 2,8 0,6 1,7 мили в К в m ЛИ1 0,9 0,6 0,5 мили 3) От более точной линии положения внутрь угла между линиями положения 180 180 130 50 (т.к. угол отрицательный) откладываем угол =-7=7 и тем самым определяем направление большой оси эллипса погрешностей. Вероятность нахождения истинного места судна в пределах площади эллипса с заданными полуосями аР = Са и вР = Св рассчитывается по формуле (10); в ней e – основание натурального логарифма. Формула (10) получена в результате интегрирования функции, выражающей плотность двухмерного нормального распределения. При этом за область интегрирования принят эллипс с заданным коэффициентом С. Единственный аргумент для расчета вероятности – величина С, характеризующая размеры эллипса относительно среднего квадратического эллипса погрешностей. Если С = 1, т.е. аР = а и вР = в (средний квадратический эллипс), то формула (10) дает результат Р = 0,393. Это значит, что вероятность нахождения истинного места судна в пределах среднего квадратического эллипса составляет 39,3%. Если С = 2, т.е. аР = 2а и вР = 2в (удвоенный средний квадратический эллипс), то Р = 0,865. Если С = 3, т.е. аР = 3а и вР = 3в (утроенный средний квадратический эллипс), то Р = 0,989. 3. Радиальная погрешность места судна Для использования эллипса погрешностей необходимо рассчитать три элемента: а, в и . Это обстоятельство усложняет расчеты и затрудняет сравнение двух или нескольких эллиптических погрешностей. Более простой и удобной оценкой точности места судна может служить радиальная средняя квадратическая погрешность – радиус круга, проведенного относительно оцениваемого места, равный геометрической сумме главных полуосей среднего квадратического эллипса (рис 7). М а 2 в2 0 а Замена эллипса погрешностей окружностью расширяет площадь нахождения истинного места и, следовательно, вероятность радиальной средней квадратической погрешности больше вероятности среднего квадратического эллипса погрешностей. а М в (12) в Рис. 7. Радиальная погрешность В МТ – 2000 есть таблица 4.13 «Вероятность радиальной погрешности». Она служит для определения вероятности Р нахождения места судна в круге заданного радиуса RР. Она рассчитана по формуле: 2 K 2P 2 Р 1 exp 2 0 где KP 1 e2 cos 2 e 2 sin 2 d (13) RP – коэффициент (нормированная радиальная погрешность), равный M заданной радиальной погрешности RР в долях СКП места М а 2 в 2 ; в e – отношение полуосей (большой и малой) среднего квадратического а эллипса погрешностей; – переменная интегрирования (в угловых единицах) Значения Р выбираются из таблицы 4.13. по коэффициенту КР и отношению в в полуосей e . Если а и в неизвестны, то выборки делают по 1 , что равнозначно а а выборкам из таблицы 4.15. При в 0 вероятности Р соответствуют данным таблицы 4.7 а для КР = Z. Решение обратной задачи по определению радиальной погрешности RР заданной вероятности выполняются по формуле (14) R P KP M где КР – коэффициент, выбираемый по вероятности Рзад обратным входом из таблицы 4.13 или же непосредственно из таблицы 4.14. Пример 2. Точность места характеризуется средним квадратическим эллипсом погрешностей с полуосями а = 1,8 мили, в = 0,7 мили. Определить вероятность нахождения места судна в круге радиуса М а 2 в 2 и круге радиуса R P 2,9 мили . Решение. 1) Рассчитываем отношение полуосей эллипса погрешностей e в 0,7 0,4 а 1,8 2) Вычисляем радиальную СКП места судна М а 2 в 2 1,9 мили 3) Для радиальной СКП места R P М , поэтому из таблицы 4.13 по К Р RP 1 и M е = 0.4 получим Р = 0.674 4) Для расчета радиальной погрешности R P 2,9 мили из таблицы 4.13 по R 2,9 КР P 1,5 и е = 0,4 выбираем Р = 0.881. M 1,9 Радиальная средняя квадратическая погрешность обсервации, полученной по двум навигационным параметрам рассчитывается по формуле 1 М m 2ЛП1 m 2ЛП 2 (15) sin при взамонезависимых навигационных параметрах. Здесь – угол пересечения линий положения. Если средние квадратические погрешности линий положения m ЛП i выразить через погрешности навигационных параметров m u и градиенты g то 2 2 m u1 m u 2 (16) g g 1 2 Величина М выражается в тех единицах длины, в которых выражены средние квадратические погрешности линий положения (в единицах длины, стоящих в знаменателе размерности градиента). Из формул (15) и (16) следует, что точность места зависит от угла пересечения линий положения (чем ближе к прямому угол , тем точнее место), от погрешности навигационных параметров (чем меньше эти погрешности, тем меньше М) и от величины градиентов (с ростом градиентов средняя квадратическая погрешность места уменьшается). Если взаимонезависимые навигационные параметры равноточны m 1 1 ( mu 1 mu 2 mu ), то M u (17) 2 2 sin g1 g 2 Если при равноточности навигационных параметров их градиенты одинаковы (высота светил, расстояния), то 1 М sin 2 (18) sin При определении места крюйс – способом первая линия положения смещается по линии пути на расстояние, пройденное судном за время между измерениями навигационных параметров. Следовательно, погрешность первой линии положения усугубляется погрешностью счисления пути на интервале между измерениями М параметров, т.е. увеличивается на величину cч . Поэтому 2 М m ЛП 2 M cч2 2 m ЛП1 m ЛП (19) М co 2 2 Радиальная средняя квадратическая погрешность счислимо – обсервованного места 1 sin M cч2 1 2 2 m ЛП m (20) ЛП 2 1 sin 2 При корреляционно взаимозависимых навигационных параметрах (0 < < 1) радиальная СКП обсервации по двум линиям положения осложняется третьим членом в подкоренном выражении и вместо угла между линиями положения ставится обязательно угол между градиентами навигационных параметров . При этом формула расчета РСКП имеет вид: 1 М m 2ЛП1 m 2ЛП 2 2m ЛП1 m ЛП 2 cos (21) sin При < 90 величина cos положительна, при > 90 – отрицательна. Учитывая это, а так же то, что перед третьим слагаемым стоит знак минус, можно заключить, что при положительной корреляции острые углы предпочтительнее тупых. При > 90 пренебрежение взаимной корреляцией, т.е. использование формулы (21) без учета третьего слагаемого, приводит к завышению точности обсервации, что в общем случае недопустимо. Если навигационные параметры содержат существенно преобладающую повторяющуюся погрешность ( = 1), то формула (21) преобразуется к виду М а 0 , где а0 – линейная погрешность, вероятность «попадания» истинного места в пределы отрезка от 0 до а0 составляет 39,3%, а М – это радиус круга, равный а0; вероятность попадания истинного места в такой круг составляет 0,683. М co Линейная (одномерная) погрешность места При решении некоторых задач навигации требуется знать среднюю квадратическую погрешность места судна по заданному направлению – по линии L (например, по направлению на навигационную опасность). Эта погрешность численно равна квадратической сумме проекций главных полуосей среднего квадратического эллипса на заданное направление (рис. 8). m L a 2 cos 2 в 2 sin 2 – угол между большой осью и линией заданного направления. Концы средних квадратических погрешностей mL, взятые по всем направлениям, образуют геометрическое место точек, называемое подерой эллипса погрешностей. При круговом распределении места (рис. 9) линейная средняя квадратическая погрешность по любому из направлений mL = а = в. (22) a mL L mL L a Рис. 8. Подера эллипса погрешностей Для радиальной средней квадратической погрешности М линейная СКП по всем направлениям принимается равной М (23) mL 2 Линейная СКП соответствует вероятности Р = 0,683. Линейная погрешность заданной вероятности Р – величина LP = ZmL, где Z – коэффициент функции Лапласа (таблица 4.7 МТ – 2000) В мореходный таблицах МТ – 2000 для упрощения расчетов линейной СКП есть таблица 4.16 «Коэффициенты для расчета средней квадратической погрешности места по заданному направлению». В таблице формула (22) представлена в виде: (24) mL K L a а – большая полуось среднего квадратического эллипса погрешностей; K L cos 2 e 2 sin 2 – коэффициент, выбираемый из таблицы 4.16 по в отношению полуосей e от 0,0 до 1,0 и углу от 0 до 180. а Угол может быть рассчитан по формуле L 180 , где – направление большой полуоси эллипса относительно меридиана L – заданное направление линейной СКП mL относительно меридиана. Если требуется рассчитать линейную СКП m L g по меридиану или m L w по параллели, то в первом случае угол = , втором – = 90 - . М а=в = а2 а РЭ = 0,393 в = а Р М = 0,632 При круговом распределении мест (рис. 10) линейная СКП по любому из направлений m L a в . Для радиальной средней квадратической погрешности М линейная СКП по всем направлениям М принимается равной m L . Линейная 2 СКП соответствует вероятности Р = 0,683. Линейная погрешность заданной вероятности Р – величина m L Z m L , где Z – коэффициент функции Лапласа (таблица 4.7 – 2000.) 4. Способы расчета эллиптической и радиальной погрешностей места судна при навигационных обсервациях по избыточным измерениям. 4.1. Обработка измерений по способу наименьших квадратов. Пусть измерено n независимых и в общем случае неравноточных навигационных параметров u i (i 1, n ) . Каждому i-ому параметру соответствует своя линия положения a i в i l i . Система, состоящая из n таких уравнений несовместна, так как в каждом из них содержится своя случайная погрешность. Несовместимость системы уравнений линий положения означает, что ни при каких значениях и не будут одновременно удовлетворяться все n уравнений, т.е. при любых и подставленных в уравнение линий положения, разности между их левыми и правыми частями будут равны не нулю, а каким-то случайным величинам i: i = 1, n (25) a i вi li i ; Для того, что бы отклонения i уравнять по точности производится их нормирование путем деления каждой величины i на соответствующую i-ю среднюю квадратическую погрешность: (26) Zi i / mi или Zi (a i в i l i ) / mi Так как Zi различны (случайны) то система этих уравнений несовместима. Наиболее подходящими поправками и следует признать такие, которые обращают в минимум всю систему величин Z i2 , т.е. при которых соблюдается условие: n F Так как Z i2 Vi2 m i2 , a Z 2 i min (27) 1 является весом i-ого навигационного параметра m i2 ( 1 / m i2 Pi ), то Z i2 Pi Vi 2 . Поэтому условие (27) преобразуется к виду: n F Pi Vi 2 min (28) Это равенство выражает минимум суммы квадратов взвешенных отклонений. Нахождение искомых поправок и из условия (28) и составляет сущность метода наименьших квадратов. Для нахождения поправок и необходимо взять частные производные от функции F по искомым поправкам и приравнять их к нулю. F F (29) 0; 0 w Уравнения (29) называются нормальными. Раскроем их, учитывая, что производная суммы равна сумме производных от слагаемых: n Vi F Pi Vi 0 (30) n Vi F Pi Vi 0 V F Принимая во внимание, что Vi определяется формулой (25) и что ai; вi нормальные уравнения (30) приводятся к виду: n n n pi ai2 p i ai в i p i a i l i n n n 2 pi ai в i pi в i pi в i l i Множители при неизвестных и называют коэффициентами нормальных уравнений, а величины, стоящие в правой части – свободными членами нормальных уравнений. Для коэффициентов вводят следующие значения: n 2 А1 pia i n B1 A 2 pia iвi n B2 p i в i2 (31) (32) Свободные члены обозначаются так: p i a i li n L2 pi вi li С учетом этих обозначений нормальные уравнения (31) примут вид: А1 В1 L1 А 2 В 2 L 2 Совместное решение нормальных уравнений дает значение искомых поправок: ( В2 L1 B1 L2 ) / D n L1 ( A1 L2 A2 L1 ) / D где D – определитель системы D A1 B2 A2 Bi ; Определив поправки и , рассчитывают координаты вероятнейшего места: b c b c sec (33) (34) (35) (36) Известно, что корреляционная матрица погрешностей вероятнейших координат равна обратной матрице, составленной из коэффициентов нормальных уравнений. 1 B2 A 2 (36) K D B1 A1 A2 D – корреляционный момент вероятнейших координат. K где K , отсюда m 2 B2 A ; m 2 1 . D D , (37) Также известно, что а 2 (в 2 ) 1 2 m m 2 (m 2 m 2 ) 2 4K 2 , 2 2 K , tg 2 2 m m 2 Подставив значения погрешностей m 2 ; m 2 и корреляционного момента K , (38) в уравнение (38) получим элементы среднего квадратического эллипса погрешностей: 1 a2 A1 B 2 (B 2 A1 ) 2 4A 22 2D 1 2 2 2 в A 1 B 2 ( B 2 A 1 ) 4A 2 2D 2A 2 tg 2 A1 B 2 (39) – угол между меридианом и малой полуосью эллипса. Если А1 > В2, то угол определяет направление малой оси эллипса погрешности относительно меридиана. Если А1 < В2, то угол определяет направление большой оси эллипса погрешностей. Радиальная СКП места выражается через полуоси эллипса: М2 = а2 + в2. Подставив сюда значения из (39) получим: (40) М (А1 В2 ) / D 4.2. Оценка точности места методом эквивалентных линий положения. При предварительных расчетах точности плавания по фарватеру или узкостях, априорная оценка точности обсерваций по n взамонезависимым линиям положения может быть выполнена с помощью калькулятора или компьютера методом эквивалентных линий положения. Эквивалентные линии положения (ЭЛП) – это линии, проходящие через вероятнейшее место судна и совпадающие с направлениями главных осей эллипса погрешностей (рис. 9). -90 ЭЛП1 в С О а ЭЛП2 Поскольку погрешности места по направлениям главных осей эллипса являются экстремальными, то экстремальными являются и веса эквивалентных линий положения. СКП первой экстремальной линии положения минимальна и равна в, поэтому вес ЭЛП1 – максимален – Рmax. СКП второй линии положения максимальна и равна а, поэтому вес ЭЛП2 минимален – Рmin. Рис. 9. Эквивалентные линии положения Между СКП линий положения и их весами существует определенное соотношение ( m ЛП 1 / p ЛП ). Следовательно, определив веса эквивалентных линий положения можно вычислить и главные полуоси среднего квадратического эллипса: ; в 1 (41) p min p max Для нахождения величин рmin и рmax можно выразить коэффициенты нормальных 1 уравнений для взаимонезависимых навигационных параметров через величины p i 2 ; mi a 1 a i g i cos i ; вi g i sin i ; p ЛП i g i2 / m i2 . Тогда n A 2 B1 p ЛП i cos i sin i ; n B2 p ЛП i sin 2 i . n A1 p ЛП i cos 2 i ; (42) В данном случае суммируются эквивалентные линии положения. Они взаимно перпендикулярны, поэтому если ЛП , то ЛП 90 и вместо формул (42) для 1 2 двух эквивалентных линий положения можно написать: A1 р max cos 2 р min sin 2 ; (43) A 2 B1 р max sin cos р min sin cos ; B 2 р max sin 2 р min cos 2 . Из этого следуют выражения: A1 B 2 р max р min ; (44) 2 2 (A1 B 2 ) 4A 2 р max р min p. Вместо коэффициентов, стоящих в левых частях данных выражений, подставим их значения, определяемые формулами (42). Тогда после преобразования получим: n p ЛП i р max р min ; (45) n n ( p ЛПi cos 2 i ) 2 ( p ЛП i sin 2 i ) 2 р max р min p. Решив совместно эти уравнения получаем: n p max 0,5( p ЛП i p) (46) n p min 0,5( p ЛП i p) Подставив это в формулы (41), находим полуоси а и в. Для расчета угла , определяющего направление малой оси эллипса, используется третья формула (39). Подставив в нее значения А1, А2 и В2, получим: n tg 2 p ЛП i sin 2 i (47) n p ЛП i cos 2 i Номер четверти, в которой расположен угол 2, определяется обычным способом – по сочетанию знаков числителя и знаменателя. 4.3. Графоаналитический способ расчета элементов эллипса погрешностей на основе эквивалентных линий положения. Расчеты выполняются в следующей последовательности: 1) находится направление i и величина gi градиента каждой линии положения. 2) вычисляются веса линий положения: g i2 p ЛП i 2 mi здесь m i – погрешность измерения навигационных параметров. 3) вычисляется сумма весов эквивалентных линий положения: она равна сумме весов исходных линий положения: n p р max р min ЛПi 4) строится полигон весов (квадратичный полигон), для чего на чистом листе бумаги из произвольной точки А (рис. 10) под углом 21 к меридиану прокладывается вектор, равный весу p ЛП первой линии положения; из его конца 1 под углом 22 к меридиану прокладывается вектор равный весу p ЛП второй 2 линии положения, и т.д.; измеряется длина замыкающей полигона весов q (p). Она равна разности весов эквивалентных линий положения. n р max р min p2 Т ЛП i p3 p1 q в а А 2n pn 2Т а q. 23 22 21 p Рис. 10. Полигон весов 5) Измеряется угол 2Т, который составляет с линией меридиана, замыкающую полигона весов; его половина, т.е. угол Т, представляет собой направление, по которому направлена малая полуось эллипса погрешностей 6) Из уравнений (46) и (41) находятся веса эквивалентных линий положения и величины полуосей эллипса погрешностей обсервованного места судна. n p max 0,5( p ЛП i q ) n (48) p min 0,5( p ЛП i q) 1 1 a ; в ; p min p max 4.4. Расчет радиальной средней квадратической погрешности обсерваций при избыточных измерениях Вероятнейшие координаты судна – это координаты, найденныу по избыточным навигационным параметрам, обладающие минимальной (для данных результатов измерений) средней квадратической погрешностью. При обсервациях по 3-4 – линиям положения, как правило, образуется фигура погрешностей, где количество точек пересечения S = (n2 – n)/2. Каждой точке пересечения линий положения дается вес p i j p ЛП i p ЛП j sin 2 ij (49) На рис. 11 показана фигура погрешностей при трех линиях положения (n = 3; S = 3). На рисунке показано получение обсервованного места О центрографическим приемом. О i j ЛП i S i j ЛП j i j С Рис. 11. Фигура погрешностей p ЛП i p ЛП j sin 2 i j i j S p ЛП i p ЛП j sin 2 i j S W i j и i j p ЛП i p ЛП j sin 2 i j Wi j (50) S p ЛП i p ЛП j sin 2 i j – поправки к счислимым координатам (к координатам расчетной точки), рассчитанные по i – й и j – й линиям положения, т.е. i j и i j – отстояния точки пересечения i – й и j – й линий положения по меридиану и параллели от счислимой (расчетной) точки. Радиальную среднюю квадратическую погрешность вероятнейшего места А1 В 2 рассчитывают по формуле, основанной на выражении М . D Если подставить в это выражение значения коэффициентов нормальных уравнений, то после подстановки и некоторых элементарных преобразований для n 5 (m(1) = 1) получим: n М р ЛП i (51) S р ЛП i р ЛПj sin 2 i j В этой формуле (под знаком радикала) в числителе сумма весов линий положения, в знаменателе – сумма весов точек пересечения. При равноточных линиях положения справедливы равенства: 1 р ЛП i р ЛПj р ЛП 2 m ЛП Поэтому n М m ЛП (52) S sin 2 i j Эта формула может быть использована при определении места по высотам звезд (планет) и по расстояниям, измеренным с одинаковой точностью. Для ориентировочных (предварительных) расчетов, точности обсерваций вычисления радиальной СКП места может производится по приближенной формуле. Для этого принимают: n m ЛПi m ЛПj m ЛП ср ( m ЛП i )/n i j = ср – среднее арифметическое значение, вычисленное по острым углам пересечения линий положения. Тогда, учитывая, что S = n(n-1)/2 формулу (52) преобразуем в вид: m ЛП ср 2 М sin ср n 1 (53) При трех линиях положения формула (53) приобретает вид: mЛП ср (54) М sin ср Из анализа формулы (53) следует, что с увеличением числа взаимонезависимых линий положения (n) точность определения вероятнейшего места повышается. Например, если сравнить точности места, определенные по двум и по n линиям положения, то во втором варианте точность будет в n 1 раз выше. В некоторых случаях возможен приближенный расчет РСКП места по трем линиям положения. Он заключается в том, что из трех линий положения выбирают две, угол между которыми близок к 80 – 110 и рассчитывает по известной формуле РСКП места для двух линий положения: 1 М О 2 ЛП m 2ЛП1 m 2ЛП 2 sin Затем используя величину М О2 ЛП рассчитывают М ОЛП 0,8М О2 ЛП . 4.5. расчет радиальной средней квадратической погрешности вероятнейшего места при объединении счислимого и обсервованного мест. Счислимое и обсервованное места осредняются при плавании в открытом море, когда их точность оценивается величинами, не отличающимися одна от другой более чем в три раза. При использовании высокоточных средств обсервации (СНС) осреднение нецелесообразно и вероятнейшее место принимают в точке, совпадающей с обсервованным местом. Осреднение счислимого и обсервованного места возможно, если невязка С соответствует критерию: (55) С 2,1 М С2 М 02 В этом случае невязка обусловлена исключительно случайными причинами. При круговых погрешностях вероятнейшее место находится на отрезке, соединяющем счислимое и обсервованное места, и является его центром тяжести. Поэтому удаление вероятнейшего места от счислимого – величину С , рассчитывают по формуле: Р0 М С2 (56) С С С 2 РС Р0 М С М 02 где Р0 и М0 – вес и СКП обсервованного места; РС и МС – вес и СКП счислимого места Вес вероятнейшего места Рв равен сумме весов счислимого и обсервованного мест. Поэтому: 1 1 1 Рв Р0 РС 2 2 2 М0 МС Мв Решив это уравнение относительно СКП вероятнейшего места Мв получим: М0 МС Мв (57) М 02 М С2 Графическое осреднение производится следующим образом (рис. 12): счислимое и обсервованное места а соединяются прямой и через них под М С2 произвольным углом к этой прямой проводятся противоположно направленные параллельные линии. Затем в произвольном, но одинаковом масштабе, откладываются величины М С2 и М 02 соответственно. Вероятнейшее С место В в точке пересечения невязки С0 В и ав. Из подобия треугольников СаВ и 0 0вВ Р СВ М С2 2 0 2 В0 М 0 Р С М0 Рис. 12. Осреднение мест. в Отсюда следует, что найденная точка В делит невязку на части, пропорциональные весам, т.е. является центром тяжести невязки. РСКП вероятнейшего места В можно так же получить графически не используя формулу (57), (рис. 13). Для этого под углом 90 проводят в произвольном масштабе М С и М 0 . В полученном треугольнике перпендикуляр из вершины прямого угла на гипотенузу равен РСКП вероятнейшего места. МС МВ М0 Рис. 13. РСКП вероятнейшего места. 5. Использование навигационных руководств и пособий для выбора величин погрешностей радионавигационных обсерваций. В настоящее время на судах Морского флота для обсервации используются только следующие радиотехнические средства морской навигации: радиолокационные станции спутниковые навигационные системы импульсно-фазовые разностнодальномерные радионавигационные системы Лоранс-С и «Чайка». В некоторых районах Мирового океана последние системы используются в объединенном варианте Лоранс-С /«Чайка». С 1995 года в эксплуатации находится Российско-Американская цепь в составе станций Петропавловск – Камчатский, Александровск – Сахалинский и Атту (США). В опутной эксплуатации Российско – Японская цепь в составе Петропавловск – Камчатский, Александровск – Сахалинский, Уссурийск, Охотск и Токатибуто (Япония), а так же Российско –Коррейско – Японская цепь в составе станций Поханг и Кванджу (республика Корея), Уссурийск (Россия), Нии Дзима и Гезаси (Япония). Соглашением между правительствами России и Норвегии от 8 марта 1995 года предусмотрено создание Российско – Норвежской цепи импульсно-фазовой РНС, а планы по созданию Черноморско – Средиземноморской цепи находятся в стадии разработки. 5.1. Использование руководства «Радиотехнические средства навигационного оборудования» и зарубежных пособий. В настоящее время изданы «Радиотехнические средства навигационного оборудования Северного – Ледовитого и Атлантического океанов» (№ 3001, 2005 год) и «Радиотехнические средства навигационного оборудования Тихого и Индийского океанов» (№ 3002, 2005 год). В связи с тем, что на судах перестали использоваться радионавигационные карты и планшеты с сеткой изолиний, появилась необходимость подойти к вопросу анализа точности обсерваций на основе данных навигационных руководств. Для системы Лоран – С в руководстве № 3001 дана таблица (стр. 55) под названием «Точность навигационных параметров». В таблице показаны погрешности определения навигационных параметров (Р = 0,68). На поверхностных сигналах: а) с фиксацией фазы в приемоиндикаторе m u = 90 – 150 метров. б) без фиксации фазы в приемоиндикаторе m u = 500 метров. На пространственных сигналах соответственно: а) m u = 600 метров. б) m u = 1200 метров. Так же на стр. 58 и 59 руководства № 3001 даны рабочие зоны поверхностных сигналов и пространственных сигналов без какого-либо указания точности обсерваций. Поэтому можно использовать английское навигационное руководство «Admiralty List of Radio Signals» (Volume 2, NP-282), «Radio Aids to Navigation, Satellite Navigation System, Legal Time, Radio Time Signals and Electronic Position fixing System». В этом руководстве в разделе «Electronic Position fixing System» на схемах «Loran – C, Chain Coverage» показаны погрешности обсерваций в районах, где принимаются поверхностные сигналы – 500 метров или лучше (Р = 95%), предположительная средняя квадратическая погрешность отклонения 0,1 микросекунды. Другим цветом показаны районы, где принимаются пространственные сигналы. На схеме показана зона, где погрешность обсерваций мене чем 2 мили при пересечении линий положения под углом более чем 15. Указана и погрешность линий положения – не более 1 мкс. В навигационном руководстве «Радиотехнические средства навигационного оборудования Тихоокеанского побережья России для Дальневосточной цепи импульсно – фазовой разностнодальномерной системы РСДН–4» («Чайка») даны две схемы рабочих зон и точность обсерваций (Р = 0,95) по районам Японского и Охотского морей. На схеме даны кривые точности обсерваций от величин 175 метров до 350 метров. Для других отечественных радионавигационных систем на схемах даны кривые равного геометрического фактора, а в начале руководства есть таблица средних квадратических погрешностей навигационного параметра. Для определения радиальной СКП места по РНС применяют формулу: М0 mu K здесь m u - погрешность навигационного параметра в линейных еденицах K - (иногда называют Г) – геометрических фактор Геометрический фактор радионавигационной системы – это коэффициент, выражающий зависимость погрешности определения места от погрешностей навигационных параметров и определяемый углами пересечения навигационных изолиний и их градиентами. При обсервациях по двум линиям положения геометрический фактор определяют исходя из уравнения: 1 М0 sin приняв m u 1 m u 2 m u получают: m u1 g 1 2 m u2 g 2 2 М0 mu т.е. K 1 sin 1 sin 1 1 2 mu K 2 g1 g 2 (58) 1 1 2 ; 2 g1 g 2 Таблицы или номограммы для определения геометрического фактора можно найти в «Справочнике капитана дальнего плаванья» (издательство «Транспорт», 1988 год) или других пособиях по навигации. Однако, даже с помощью микрокалькулятора, расчет К очень прост. 6. Использование одной линии положения для уточнения счислимого места судна. Если получена одна линия положения, то есть возможность уточнить счислимое места судна способом, которым осредняют счислимое и обсервованное место (рис. 13). В общем случае проводится перпендикуляр к линии положения и рассчитывается ее погрешность m m ЛП u . Так же М С2 g K рассчитывается РСКП счислимого места С – МС. С Далее из точек С и К проводят параллельно в противоположные стороны 2 квадраты векторов М С и m ЛП . m ЛП Соединив концы векторов отрезком прямой, в точке С пересечения отрезка КС получают Рис. 13. Использование одной линии положения. уточненное счислимое место С, от которого продолжают счисление. При сомнениях в работе компаса или лага, можно выполнить построение по-иному. В первом случае в счислимой точке С провести перпендикуляр к линии пути до пересечения с полученной линией положения и из этой точки продолжить счисление. При предположениях о плохой работе лага, можно продолжить линию пути до пересечения с полученной линией положения, и из точки пересечения продолжить счисление. Список литературы. 1. Admiralty List of Radio Signals,Volume 2, (Великобритания), 2004 / 05. 2. Груздев Н. М., Гладков Г. Е. Математическая обработка и анализ навигационной информации. – М.: Военное издательство, 1992. – 156 стр. 3. Груздев Н. М., Оценка точности морского судовождения. – М.: Транспорт, 1989. – 191 с. 4. Дмитриев В. И., Григорян В. Л., Катенин В.А. Навигация и лоция / под ред. В. И. Дмитриева. – М.: ИКЦ «Академкнига», 2004 – 471 с. 5. Домбинский А. П. Методические указания для выполнения лабораторных работ по математическим основам судовождения. – Владивосток.: ДВГМА, 1999 – 54 с. 6. Кондрашихин В. Т. Определение места судна. – М.: Транспорт,1989. – 230 с. 7. Радиотехнические средства навигационного оборудования Тихоокеанского побережья России (№ 3403) – СПб.: ГУНиО МО РФ , 2000 – 96 с. 8. Радиотехнические средства навигационного оборудования Северного Ледовитого и Атлантического океанов (№ 3001) – СПб.: ГУНиО МО РФ , 2005 – 380 с. 9. Справочник капитана дальнего плавания / Л. Р. Аксютин, В. М. Бондарь, Г. Г. Ермолаев и др.; Под ред. Г. Г. Ермолаева. – М.: Транспорт, 1988 – 248 с.