F и
advertisement

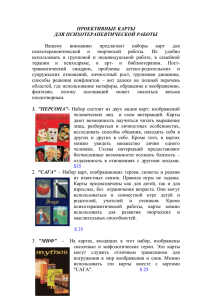
ТВЕРСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Торфяные машины и оборудование» НАУЧНЫЙ ОТЧЕТ ПО ТЕМЕ «ОБОСНОВАНИЕ ПАРАМЕТРОВ УПРУГИХ ПРЕДОХРАНИТЕЛЬНЫХ ДЕМПФЕРОВ-АМОРТИЗАТОРОВ ДЛЯ КОМПЛЕКСА СОБАЧЬИХ УПРЯЖЕК» «УТВЕРЖДАЮ» проректор по научной работе и международным связям ФГБОУ ВПО «ТвГТУ» доктор технических наук, профессор Зюзин Б.Ф. Ответственный исполнитель: доктор технических наук, доцент Тверь 2013 Яблонев А.Л. 2 ВВЕДЕНИЕ Актуальность работ по поиску решений и обоснованию параметров демпферов-амортизаторов для собачьих упряжек вызвана необходимостью предохранения от гибели и тяжелых телесных повреждений ездовых собак в результате гонок и катаний на повозках по пересеченной местности. Поскольку этот вид спорта и развлечений уже завоевал своих приверженцев, развивается и приумножается, множатся и травмы, вызванные воздействием упряжи на тела собак. Защита ездовых собак от пиковых нагрузок при проведении заездов возможна при помощи использования упругого демпфера-амортизатора, установленного между колесным картом (нартами) и упряжью собаки. Поискам решений такой конструктивной доработки и обоснованию ее параметров посвящен нижеследующий научный отчет, выполненный представителями ФГБОУ ВПО «Тверской государственный технический университет» по запросу мастера спорта международного класса по гонкам на упряжках Сергея Юрьевича Панюхина – одного из самых известных гонщиков России. Несколько фактов из истории. Семья Панюхиных – Елена, Сергей, Дарья, Александра – профессионально занимаются ездовым спортом. В 1992 году на Камчатке они создали первый в России питомник спортивных ездовых собак "Ингляу", который на сегодняшний день лучший в России. С 1997 года семья Панюхиных занимается организацией соревнований. На Камчатке они организовали и провели первые в стране этапы Кубка Европы и Мира по средним дистанциям – гонку "Камчадал" (2004 и 2005 годы), этап Кубка Европы по ски-джорингу (лыжник + собака – 2006 год ), готовили гонку "Урал-рейс" в Челябинской области ( 2007 год). В 2008 году Панюхины переехали в Центральную Россию, полностью перевезли питомник. Сейчас они располагаются в Тверской области, у них 25 спортивных собак. По словам Сергея Панюхина, в России, к сожалению, к 3 гонкам на собаках до сих пор относятся как к экзотике и занятию чудаков, несмотря на то, что ездовой спорт чрезвычайно развит во всем мире – только в Европе в год проводится около 1000 стартов. Однако наблюдается положительная тенденция: увеличивается количество россиян, занимающихся ездовым спортом, гонки на собаках включены в реестр официальных видов спорта России, проводятся Чемпионаты страны. Сергей Панюхин о ездовом спорте: «Это удивительный спорт, думаю единственный, где человек и животные работают вместе на одну цель. В отличие от лошадей, спортивные собаки бегут без принуждения. У них есть кураж и азарт, и настрой на победу. Человек здесь тренер и руководитель, а собаки – члены его спортивной команды, и они рвутся на дистанцию» [1]. Проведенное исследование позволило выявить три наиболее распространенных вида прицепных повозок: трех и четырехколесные карты (для осеннее-весенне-летних заездов) и нарты (для зимних заездов). Для каждой из этих повозок рассмотрено несколько режимов, обобщение которых приводит к параметрам и конструкции демпфера-амортизатора. 4 1. ТРЕХКОЛЕСНЫЙ ПРИЦЕПНОЙ КАРТ Трехколесный карт, изображенный на рис. 1. представляет собой прицепную трехколесную повозку, оснащенную устройством управления направлением движения (вращающаяся передняя вилка) и колодочными тормозами всех колес, имеющими механический привод от рычагов, расположенных на руле. Сцепление с собачьей упряжью происходит с помощью потяга, жестко прикрепленного к раме. Рис. 1. Трехколесный карт Собственная масса карта mк = 25 кг. Максимальная скорость движения Vmax = 45 км/ч =12,5 м/с. Средняя скорость движения Vср = 33 км/ч = 9,17 м/с. Средняя масса наездника принимается mч = 80 кг. Геометрические размеры колес приведены на рис. 2. Масса переднего колеса m1 = 2,3 кг, масса заднего колеса m2 = 2,0 кг. Общий вес G карта с наездником составляет: G = (mк+mч)g, где g =9,81 м/с2 – ускорение свободного падения. G = (25 + 80)*9,81 = 1030,05 Н. (1.1) Ø Dвн = 410 мм Ø Dнар = 520 мм Ø Dвн = 550 мм Ø Dнар = 660 мм 5 b = 55 мм b = 55 мм а б Рис. 2. Геометрические размеры колес трехколесного карта: а – переднее колесо; б – заднее колесо 1.1. РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТРЕХКОЛЕСНОГО КАРТА В УПРЯЖКЕ При равномерном движении по прямой, на карт действуют следующие силы, изображенные на рис. 3: G – вес карта с наездником; Rд – сила сопротивления передвижению карта; Т11 – толкающая сила, воздействующая на карт через потяг от упряжи собак. V T11 Rд G Рис. 3. Силы, действующие на трехколесный карт при прямолинейном равномерном движении 6 Уравнение движения имеет вид: 𝑇11 = 𝐺𝑓 , (1.2) где f – коэффициент сопротивления движению колесных экипажей, принимаемый от 0,05 (для грунтовых дорог) до 0,3 (для песчаных дорог) [2, стр. 17]. С учетом найденного значения G получим формулу для данного случая: 𝑇11 = 1030,05𝑓. (1.3) Подставляя f , получим результаты вычислений и сведем их в таблицу 1.1. Таблица 1.1 f T11, Н 0,05 51,5 0,3 309,02 1.2. РАВНОЗАМЕДЛЕННОЕ ДВИЖЕНИЕ ТРЕХКОЛЕСНОГО КАРТА НА ПОДЪЕМЕ В ГОРУ Будем считать, что угол подъема не превышает α = 25о [опыт заездов]. Схема сил, действующих на карт изображена на рис. 4. T12 Fи V Rд α G Рис. 4. Силы, действующие на трехколесный карт при равномерном движении в гору 7 Кроме уже перечисленных в п. 1.1, на карт действует сила инерции Fи, вызванная полной массой карта и маховыми моментами вращающихся колес. Уравнение движения в этом случае имеет вид: 𝑇12 = 𝐺 𝑠𝑖𝑛𝛼 + 𝐺𝑓 𝑐𝑜𝑠𝛼 + 𝐹и . (1.4) Сила инерции определяется коэффициентом учета вращающихся масс δвр, массой экипажа (mк + mч), и замедлением a [2, стр.21], [3, стр. 268]: 𝐹и = (𝑚к + 𝑚ч )𝑎𝛿вр . (1.5) Замедление рассчитать невозможно из-за недостаточности данных об условиях заезда, поэтому оно условно принимается в расчетах a ≈ 1 м/с2. Коэффициент учета вращающихся масс определяется суммарным моментом инерции вращающихся колес Jк, средним радиусом качения колес rср и массой экипажа (mк + mч) [3, стр. 268]: 𝐽 𝛿вр = 1 + к⁄ 2 . (𝑚к + 𝑚ч )𝑟𝑐р (1.6) Суммарный момент инерции вращающихся колес Jк определяется моментами инерции всех колес: 𝐽к = 𝐽1 + 𝐽2 + 𝐽3 , (1.7) при этом момент инерции одного колеса находится по массе колеса mJ и его геометрическим размерам, как для полого круглого цилиндра [4, стр. 327]: 𝐽𝐼 = 2 2 𝑚𝐽 (𝐷нар + 𝐷вн )⁄ 8. (1.8) Для переднего колеса: 𝐽1 = 2,3(0,662+0,552)/8 = 0,21 кг*м2. Для заднего колеса: 𝐽2 = 𝐽3 = 2,0(0,522 + 0,412)/8 = 0,11 кг*м2. Суммарный момент инерции вращающихся колес Jк = карта: rср = 0,21+0,11+0,11=0,43 кг*м2. Средний радиус качения колес трехколесного (0,66+0,52+0,52)/3*2 = 0,28 м. Тогда коэффициент учета вращающихся масс δвр 1+0,43/(80+25)*0,282=1,05, и сила инерции Fи = (80+25)*1*1,05 = 110,25 Н. Подставляя в (1.4) все найденные величины и угол подъема, имеем: = 8 𝑇12 = 𝐺 (𝑠𝑖𝑛25 + 𝑓 𝑐𝑜𝑠25) + 110,25 = 1030,05*(0,42 + 0,91f) + 110,25 . (1.9) Подставляя в (1.9) вышеуказанные значения f, получим данные, из которых составим таблицу 1.2. Таблица 1.2 f T12, Н 0,05 587,7 0,3 824,1 1.3. ПРЯМОЛИНЕЙНОЕ РАВНОУСКОРЕННОЕ ДВИЖЕНИЕ ТРЕХКОЛЕСНОГО КАРТА В отличие от случая, описанного в п. 1.1, на карт при прямолинейном движении с ускорением, действует сила инерции 𝐹и , вызванная вращением колес, имеющих маховые массы, и направленная против направления движения (рис. 5). V Т13 Fи Rд G Рис. 5. Силы, действующие на трехколесный карт при прямолинейном равноускоренном движении Уравнение движения будет иметь вид: 𝑇13 = 𝐺𝑓 + 𝐹и . (1.10) Коэффициент сопротивления передвижению f определен в п. 1.1, сила инерции 𝐹и в п. 1.2. Таким образом, уравнение (1.10) преобразуется: 𝑇13 = 1030,05𝑓 + 110,25. (1.11) 9 Подставляя в (1.11) значения коэффициента сопротивления передвижению f получим значения 𝑇13 , которые занесем в табл. 1.3. Таблица 1.3 f T13, Н 0,05 161,75 0,3 419,27 1.4. ДВИЖЕНИЕ ТРЕХКОЛЕСНОГО КАРТА НА СПУСКЕ ПРИ ТОРМОЖЕНИИ При движении на спуске, гонщик начинает притормаживать (или, даже, тормозить!) всеми тормозами карта, от чего возникает тормозная сила Fт, направленная противоположно скорости движения. Кроме того, сила инерции 𝐹и , обусловленная вращением колес, имеющих маховые массы, направлена не противоположно, а в одну сторону с вектором скорости движения (рис. 6). V Fт Fи T14 G Rд α Рис. 6. Силы, действующие на трехколесный карт при торможении на спуске с горы Уравнение движения в данном случае имеет вид: 𝑇14 = 𝐺𝑓𝑐𝑜𝑠𝛼 − 𝐺𝑠𝑖𝑛𝛼 − 𝐹и + 𝐹т . (1.12) 10 Максимальное значение тормозной силы, принимаемое в расчетах равно силе сцепления между колесом и дорогой: 𝐹т = 𝐹сц = 𝑁𝜑, (1.13) где N – реакция вертикальной нагрузки на колесо; φ – предельный коэффициент сцепления между колесом и дорогой, принимаемый в расчетах φ = 0,7 [2, стр. 389]. Вертикальная нагрузка на колеса: 𝑁 = 𝐺𝑐𝑜𝑠𝛼. (1.14) Подставляя все элементы в (1.12), получим: 𝑇14 = 𝐺(𝑓𝑐𝑜𝑠𝛼 − 𝑠𝑖𝑛𝛼 + 𝜑𝑐𝑜𝑠𝛼) − 𝐹и , (1.15) или: 𝑇14 = 1030,05(𝑓𝑐𝑜𝑠25 − 𝑠𝑖𝑛25 + 0,7𝑐𝑜𝑠25) − 𝐹и , (1.16) с учетом 𝐹и и значений тригонометрических функций: 𝑇14 = 1030,05(0,91𝑓 − 0,42 + 0,7 ∗ 0,91) − 110,25 = 1030,05(0,91𝑓 + +0,22 ) − 110,25. (1.17) Решая уравнение (1.17) относительно f, найдем значения Т14 и заполним таблицу 1.4. Таблица 1.4 f T14, Н 0,05 163,23 0,3 397,56 1.5. СТОЛКНОВЕНИЕ ТРЕХКОЛЕСНОГО КАРТА, ДВИЖУЩЕГОСЯ ПРЯМОЛИНЕЙНО НА СКОРОСТИ С ПРЕПЯТСТВИЕМ Для оценки этого случая необходимо воспользоваться теоремой об изменении количества движения материальной точки: «Изменение проекции количества движения точки на какую-либо ось равно проекции на ту же ось импульса силы, действующей на точку за то же время» [4, стр. 298]. Математически данная теорема записывается следующим образом: 11 𝑚𝑣1𝑥 − 𝑚𝑣0𝑥 = 𝑇𝑥 𝑡𝑖 = 𝐼𝑥 , (1.18) где m – масса тела, сталкивающегося с препятствием, кг; 𝑣1𝑥 – проекция скорости поступательного движения тела на ось ОХ после столкновения с препятствием, м/с; 𝑣0𝑥 – проекция скорости поступательного движения тела на ось ОХ до столкновения с препятствием, м/с; 𝑇𝑥 – проекция на ось ОХ силы, действующей на тело в процессе столкновения с препятствием (ударом), Н; 𝑡𝑖 – время столкновения с препятствием (удара), с; 𝐼𝑥 – проекция на ось ОХ импульса силы, действующей на тело при столкновении с препятствием. Время удара в данных условиях определить невозможно из-за ограниченности данных о материале, форме и способе закрепления в почве препятствия, угле наезда на него, характеристиках движения и т.д., поэтому можно ориентировочно принять время удара 𝑡𝑖 = 0,1 с. Практика разбора аварийных ситуаций на автомобильном транспорте показывает, что при скоростях тела выше 80 км/ч время удара принимается до 0,01 с. Считая удар о препятствие неупругим (иное трудно себе представить, ведь не с резиновой же стеной сталкивается карт!), можно принять также, что 𝑣1𝑥 = 0, т.е. столкнувшись с препятствием, карт останавливается. Для этих условий можно записать, пользуясь (1.18): −𝑚𝑉 = 𝑇15 𝑡𝑖 , (1.19) где V – скорость поступательного движения карта до удара (в нашем случае она принимает значение средней Vср или максимальной скоростей Vmax , м/с); 𝑇15 – сила, действующая на собак через упряжь со стороны резко и внезапно остановленного карта, Н. Знак « – « показывает, что импульс силы направлен противоположно направлению скорости поступательного движения карта до удара. Таким образом, 𝑇15 = − 𝑚𝑉⁄𝑡 = − 105𝑉⁄0,1. 𝑖 (1.20) 12 Подставляя в формулу (1.20) значения средней и максимальной скоростей, получим силу, действующую на собак в процессе столкновения с препятствием, которую занесем в таблицу 1.5. Таблица 1.5 V, м/с Т15, Н 9,17 9628,5 12,5 13125 2. ЧЕТЫРЕХКОЛЕСНЫЙ ПРИЦЕПНОЙ КАРТ Четырехколесный карт, изображенный на рис. 7 и 8 представляет собой прицепную четырехколесную повозку, оснащенную устройством управления направлением движения (вращающийся рулевой вал с приводом на оси передних колес) и барабанными тормозами всех колес, имеющими механический привод от рычагов, расположенных на руле. Сцепление с собачьей упряжью происходит с помощью потяга, жестко прикрепленного к раме. Рис. 7. Четырехколесный прицепной карт 13 Рис. 8. Четырехколесный прицепной карт (вид сбоку) Собственная масса карта mк = 35 кг. Максимальная скорость движения Vmax = 50 км/ч =13,89 м/с. Средняя скорость движения Vср = 33 км/ч = 9,17 м/с. Средняя масса наездника принимается mч = 80 кг. Геометрические размеры всех четырех одинаковых колес приведены на рис. 9. Масса колеса Ø Dвн = 410 мм Ø Dнар = 520 мм m1 = 2,0 кг. b = 55 мм Рис. 9. Геометрические размеры колес четырехколесного карта 14 Общий вес G карта с наездником составляет: G = (mк+mч)g, (2.1) где g =9,81 м/с2 – ускорение свободного падения. G = (35 + 80)*9,81 = 1128,15 Н. 2.1. РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ЧЕТЫРЕХКОЛЕСНОГО КАРТАВ УПРЯЖКЕ При равномерном движении по прямой, на карт действуют следующие силы, изображенные на рис. 10: G – вес карта с наездником; Rд – сила сопротивления передвижению карта; Т21 – толкающая сила, воздействующая на карт через потяг от упряжи собак. V T21 Rд G Рис. 10. Силы, действующие на четырехколесный карт при прямолинейном равномерном движении Уравнение движения имеет вид: 𝑇21 = 𝐺𝑓 , (2.2) где f – коэффициент сопротивления движению колесных экипажей, принимаемый от 0,05 (для грунтовых дорог) до 0,3 (для песчаных дорог) [2, стр. 17]. С учетом найденного значения G получим формулу для данного случая: 𝑇21 = 1128,15𝑓. (2.3) Подставляя f , получим результаты вычислений и сведем их в таблицу 2.1. 15 Таблица 2.1 f T21, Н 0,05 56,41 0,3 338,45 2.2. РАВНОЗАМЕДЛЕННОЕ ДВИЖЕНИЕ ЧЕТЫРЕХКОЛЕСНОГО КАРТА НА ПОДЪЕМЕ В ГОРУ Будем считать, что угол подъема не превышает α = 25о [опыт заездов]. Схема сил, действующих на карт изображена на рис. 11. T22 Fи V Rд α G Рис. 11. Схема сил, действующих на четырехколесный карт при равнозамедленном движении в гору Уравнение движения в этом случае имеет вид: 𝑇22 = 𝐺 𝑠𝑖𝑛𝛼 + 𝐺𝑓 𝑐𝑜𝑠𝛼 + 𝐹и . (2.4) Сила инерции Fи [2, стр. 21], [3, стр. 268], по аналогии с п. 1.2: 𝐹и = (𝑚к + 𝑚ч )𝑎𝛿вр . (2.5) Из-за невозможности расчетов ввиду отсутствия конкретных данных, замедление условно принимается a ≈ 1 м/с2. 16 Коэффициент учета вращающихся масс определяется суммарным моментом инерции вращающихся колес Jк, средним радиусом качения колес rср и массой экипажа (mк + mч) [3, стр. 268]: 𝐽 𝛿вр = 1 + к⁄ 2 . (𝑚к + 𝑚ч )𝑟𝑐р (2.6) Суммарный момент инерции четырех одинаковых вращающихся колес Jк определяется моментами инерции всех колес: 𝐽к = 4𝐽1 , (2.7) при этом момент инерции одного колеса находится по массе колеса m1 и его геометрическим размерам, как для полого круглого цилиндра [4, стр. 327]: 𝐽𝐼 = 2 2 𝑚1 (𝐷нар + 𝐷вн )⁄ 8. (2.8) 𝐽1 = 2,0(0,522+0,412)/8 = 0,11 кг*м2. Суммарный момент инерции вращающихся колес Jк = 4*0,11 = 0,44 кг*м2. Средний радиус качения колес четырехколесного карта: rср = 0,52/2 = 0,26 м. Коэффициент учета вращающихся масс δвр = 1+0,44/(80+35)*0,262=1,06 и сила инерции Fи = (80+35)*1*1,06 = 111,3 Н. Подставляя в (2.4) все найденные величины и угол подъема, имеем: 𝑇22 = 𝐺 (𝑠𝑖𝑛25 + 𝑓 𝑐𝑜𝑠25) + 111,3 = 1128,15*(0,91f + 0,42) + 111,3 . (2.9) Подставляя в (2.9) вышеуказанные значения f, получим данные, из которых составим таблицу 2.2. Таблица 2.2 f T22, Н 0,05 636,45 0,3 893,1 2.3. ПРЯМОЛИНЕЙНОЕ РАВНОУСКОРЕННОЕ ДВИЖЕНИЕ ЧЕТЫРЕХКОЛЕСНОГО КАРТА На карт в этом случае действуют силы, изображенные на рис. 12. V Fи Т23 17 Рис. 12. Схема сил, действующих на четырехколеный карт при прямолинейном равноускоренном движении Подобный случай описан в п. 1.3. Уравнение движения имеет вид: 𝑇23 = 𝐺𝑓 + 𝐹и . (2.10) Коэффициент сопротивления передвижению f определен в п. 2.1, сила инерции 𝐹и в п. 2.2. Таким образом, уравнение (2.10) преобразуется: 𝑇23 = 1128,15𝑓 + 111,3. Подставляя в (2.11) значения коэффициента (2.11) сопротивления передвижению f получим значения 𝑇23 , которые занесем в табл. 2.3. Таблица 2.3 f T23, Н 0,05 167,71 0,3 449,75 2.4. ДВИЖЕНИЕ ЧЕТЫРЕХКОЛЕСНОГО КАРТА НА СПУСКЕ ПРИ ТОРМОЖЕНИИ Случай и особенности действия сил на карт описаны в п. 1.4, схема сил представлена на рис. 13. V Fт Fи 18 Рис. 13. Силы, действующие на четырехколесный карт на спуске с горы при торможении Уравнение движения в данном случае имеет вид: 𝑇24 = 𝐺𝑓𝑐𝑜𝑠𝛼 − 𝐺𝑠𝑖𝑛𝛼 − 𝐹и + 𝐹т . (2.12) Максимальное значение тормозной силы, принимаемое в расчетах равно силе сцепления между колесом и дорогой (1.13). Вертикальная нагрузка на колеса (1.14). Подставляя все элементы в (2.12), получим: 𝑇24 = 𝐺(𝑓𝑐𝑜𝑠𝛼 − 𝑠𝑖𝑛𝛼 + 𝜑𝑐𝑜𝑠𝛼) − 𝐹и , (2.13) или: 𝑇24 = 1128,15(𝑓𝑐𝑜𝑠25 − 𝑠𝑖𝑛25 + 0,7𝑐𝑜𝑠25) − 𝐹и , (2.14) с учетом 𝐹и и значений тригонометрических функций: 𝑇24 = 1128,15(0,91𝑓 − 0,42 + 0,7 ∗ 0,91) − 111,3 = 1128,15(0,91𝑓 + +0,22) − 111,3. (2.15) Решая уравнение (2.15) относительно f, найдем значения Т24 и заполним таблицу 2.4. Таблица 2.4 f T24, Н 0,05 188,22 0,3 444,87 19 2.5. СТОЛКНОВЕНИЕ ЧЕТЫРЕХКОЛЕСНОГО КАРТА, ДВИЖУЩЕГОСЯ ПРЯМОЛИНЕЙНО НА СКОРОСТИ С ПРЕПЯТСТВИЕМ Подобный случай описан в п. 1.5. Время удара здесь также невозможно определить из-за недостаточности данных, поэтому оно принимается t1=0,1 с. Для этих условий, согласно (1.18): −𝑚𝑉 = 𝑇25 𝑡1 , (2.16) где V – скорость поступательного движения карта до удара (в нашем случае она принимает значение средней Vср и максимальной скоростей Vmax , м/с); 𝑇25 – сила, действующая на собак через упряжь со стороны резко и внезапно остановленного карта, Н. Знак « – « показывает, что импульс силы направлен противоположно направлению скорости поступательного движения карта до удара. Таким образом, 𝑇25 = − 𝑚𝑉⁄𝑡 = − 115𝑉⁄0,1. (2.17) 𝑖 Подставляя в формулу (2.17) значения средней и максимальной скоростей, получим силу, действующую на собак в процессе столкновения с препятствием, которую занесем в таблицу 2.5. Таблица 2.5 V, м/с Т25, Н 9,17 10545,5 13,89 15973,5 3. НАРТЫ Нарты представляют собой санную повозку, размещенную на полозьях (рис. 14, 15) для движения по снегу. Полозья (лыжи) изготовлены из углепластика неизвестного состава. Нарты снабжены двумя системами торможения: плавной (постепенной), путем вдавливания в снежный покров резино-полимерной пластины с протектором (рис. 16), и экстренной (резкой) 20 – путем вдавливания в снег сдвоенного стального тормозного штифта-ножа, увенчанного по верху горизонтальной пластиной, дающей бульдозерный эффект (рис. 17). Рис. 14. Нарты Рис. 15. Нарты (вид сбоку) 21 Рис. 16. Плавный тормоз нарт Рис. 16. Экстренный тормоз нарт в действии Собственная масса нарт может достигать 45 кг, но в исследуемом случае mн = 15 кг. Максимальная скорость движения Vmax = 50 км/ч =13,89 м/с. Средняя скорость движения Vср = 33 км/ч = 9,17 м/с. Средняя масса 22 наездника принимается mч = 80 кг. Общий вес G нарт с наездником составляет: G = (mн+mч)g, (3.1) где g = 9,81 м/с2 – ускорение свободного падения. G = (15 + 80)*9,81 = 931,95 Н. 3.1. РАВНОМЕРНОЕ ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ НАРТ В УПРЯЖКЕ При равномерном движении по прямой, на нарты действуют следующие силы, изображенные на рис. 17: G – вес нарт с наездником; Rд – сила сопротивления передвижению нарт, равная силе трения скольжения; Т31 – толкающая сила, воздействующая на нарты через потяг от упряжи собак. T31 V Rд G Рис. 17. Силы, действующие на нарты при прямолинейном равномерном движении Уравнение движения имеет вид: 𝑇31 = 𝐺𝑓л , (3.2) где fл – коэффициент трения скольжения при движению лыж по снегу. В разных литературных источниках этот коэффициент принимается различным, сильно зависящим от состояния снега и состава материала лыж. Минимальное найденное значение fл = 0,02 [5] – для температуры воздуха около -20оС, включением в состав углепластика полиэтилена и графита. Максимальное найденное значение fл = 0,2 [6] для условий движения 23 углепластиковых лыж с добавлением фторопласта по липкому, загрязненному грунтом, снегу. С учетом найденного значения G получим формулу для данного случая: 𝑇31 = 931,95𝑓л . (3.3) Подставляя fл получим результаты вычислений и сведем их в таблицу 3.1. Таблица 3.1 fл T31, Н 0,02 18,64 0,2 186,39 3.2. РАВНОЗАМЕДЛЕННОЕ ДВИЖЕНИЕ НАРТ НА ПОДЪЕМЕ В ГОРУ Будем считать, что угол подъема не превышает α = 25о [опыт заездов]. Схема сил, действующих на нарты, изображена на рис. 18. T32 Rд Fи V G α Рис. 18. Схема сил, действующих на нарты при равнозамедленном движении в гору Поскольку в санной повозке нет вращающихся масс, то сила инерции 𝐹и обусловлена лишь полной массой нарт с экипажем (mн + mч) и замедлением а, определить которое невозможно из-за недостаточности данных о конкретных условиях. Примем, как и в п. 1.2, 2.2 а ≈ 1 м/с2. Тогда общее уравнение будет иметь вид: 24 𝑇32 = 𝐺𝑓л 𝑐𝑜𝑠𝛼 + 𝐺𝑠𝑖𝑛𝛼 + 𝐹и , (3.4) подставляя известные значения получим: 𝑇32 = 𝐺(𝑓л 𝑐𝑜𝑠𝛼 + 𝑠𝑖𝑛𝛼) + (𝑚н + 𝑚ч )𝑎, (3.5) 𝑇32 = 931,95(𝑓л 𝑐𝑜𝑠25 + 𝑠𝑖𝑛25) + (15 + 80) ∗ 1 = 931,95(0,91𝑓л + +0,42) + 95. (3.6) Подставляя в (3.6) fл, получим значения Т32, которые занесем в таблицу 3.2. Таблица 3.2 fл T32, Н 0,02 503,38 0,2 656,03 3.3. ПРЯМОЛИНЕЙНОЕ РАВНОУСКОРЕННОЕ ДВИЖЕНИЕ НАРТ В отличие от случая, описанного в п. 3.1, на нарты при прямолинейном движении с ускорением, действует сила инерции 𝐹и , обусловленная полной массой нарт (п. 3.2) и ускорением, принимаемым а = 1 м/с2 (рис. 19). V Fи T33 Rд Рис. 19. Схема сил, действующих на нарты при прямолинейном равноускоренном движении Уравнение движения нарт имеет вид: 𝑇33 = 𝐺𝑓л + 𝐹и , (3.7) подставляя в (3.7) известные значения получим: 𝑇33 = 931,95𝑓л + 95. (3.8) 25 Подставляя в (3.8) коэффициент трения скольжения, получаем значения 𝑇33 , которые заносим в таблицу 3.3. Таблица 3.3 fл T33, Н 0,02 113,64 0,2 281,39 3.4. ДВИЖЕНИЕ НАРТ НА СПУСКЕ ПРИ ТОРМОЖЕНИИ При движении на спуске, гонщик начинает притормаживать и тормозить как плавным, так и экстренным тормозами. Рассмотрим случай макcимальной нагруженности упряжи, когда гонщик тормозит экстренным тормозом, от чего возникает тормозная сила Fт, направленная противоположно скорости движения. Кроме того, сила инерции 𝐹и , обусловленная полной массой экипажа, направлена не противоположно, а в одну сторону с вектором скорости движения (рис. 20). V Fт Fи T34 G α Rд Рис. 20. Силы, действующие на нарты при спуске с горы и торможении Уравнение движения нарт выглядит следующим образом: 𝑇34 = 𝐺𝑓л 𝑐𝑜𝑠𝛼 − 𝐺𝑠𝑖𝑛𝛼 − 𝐹и − 𝐹т = 𝐺(𝑓л 𝑐𝑜𝑠𝛼 − 𝑠𝑖𝑛𝛼) − 𝐹и + 𝐹т . (3.9) Наиболее сложным в определении элементом вышеприведенного уравнения является тормозная сила. Ее нельзя найти, пользуясь 26 стандартными и широко распространенными методиками по расчету тормозов, так как конструкция тормозов нарт не похожа ни на один, описанный в литературе по машинам и механизмам, тормоз. Подобные виды тормозов были применены на аэросанях времен Великой отечественной войны [7], однако методов их расчета найдено не было. Анализируя данное торможение, как сопротивление движению тормозному элементу, входящему под усилием ноги человека в снег, можно отметить, что процесс очень схож с резанием снега, где в качестве ножа применяется зуб весьма сложной формы [8] (рис. 21). V снег β ϒ Pτ Р Pn снег Рис. 21. Схема резания снега (торможения) Можно определить угол заострения (заточки) β и угол резания ϒ – в нашем случае он близок к 800. С позиции необходимости снижения энергоемкости процессов такой угол резания нельзя назвать рациональным, но если ставить задачу получения максимальной силы сопротивления, то можно с уверенностью отметить, что этот угол выбран верно. Ведь наибольшее сопротивление движению могут испытывать нарты при угле резания снега ϒ около 900. Но при этом значительно возрастает выталкивающая сила, и наезднику придется очень сильно вдавливать в снег тормоз. При незначительном снижении угла резания от 900, выталкивающая сила значительно снижается, и даже наоборот, может стать отрицательной! Снег, 27 как и любой другой грунт, стремится затянуть в свои недра нож тормоза, от чего усилие, прикладываемое человеком значительно меньше. Рассматривая торможение, как резание снега, необходимо сделать незначительное упрощение. Ведь на нож, который режет и снег и любой другой материал, действует сила резания Р, которую принято представлять ее ортогональными составляющими: нормальной Pn, и тангенциальной Pτ.. Нормальная составляющая всегда направлена по нормали к плоскости движения ножа, от плоскости движения к основанию ножа. Именно эта составляющая является выталкивающей. Тангенциальная составляющая всегда направлена в сторону, противоположную направлению движения и резания. Соотношение этих составляющих зависит от угла резания. Будем считать, что все усилие резания ограничивается тангенциальной составляющей силы резания. В общем случае, для нашей задачи, нормальная составляющая усилия резания имеет значение лишь для силы, с которой человек вдавливает в снег нож тормоза. Итак, будем считать, что Р = Рτ. На силу сопротивления резания влияют прочностные факторы материала резания (снега), углы заострения и резания, скорость резания, ширина ножа, глубина резания, форма режущего ножа. Попытка учесть многие из этих факторов предпринята в работе [9, стр. 28]. Однако это исследование справедливо лишь для одиночных ножей, хотя и уплотненного снега. Нож, который применяется в исследуемой схеме нарт, никак нельзя отнести к одиночным (рис. 22). 30 50 30 190 Ø14 50 Рис. 22. Схема ножевого тормоза нарт 28 По форме – это скорее, сдвоенный, увенчанный верхней планкой нож. Начальные элементы ножа – заостренные штифты диаметром 14 мм и длиной 30 мм. Штифты плавно переходят в пластины треугольного сечения размером 50*50*50 мм, которые связаны по верху планкой размером 30*190 мм. Причем, по мере заглубления в снег, благодаря различным по площади участкам, такой нож должен обеспечивать не линейную, а прогрессивную характеристику силы торможения. Кроме того, отсутствие поперечных углов установки ножа говорит о том, что весь разрезанный снег не отводится в сторону (как у отвала), а выдавливается в стороны, волочится вперед по ходу движения и дополнительно уплотняется, от чего сила резания (и торможения!) увеличивается приблизительно на 30 % (бульдозерный эффект) [10, стр. 160-162]. Максимальная суммарная площадь ножа, вдавленного в снег, составляет по расчетам S = 0,00904 м2 (расчет произведен путем разбивки ножа на участки, определения площадей отдельных участков и суммирования участков). Поскольку нож имеет сложную конструкцию, и найти метод расчета силы резания от такого ножа не удалось, имеет смысл применить метод, предложенный академиком Горячкиным В.П. [10, стр.127], предполагающем зависимость силы резания от коэффициента сопротивления резанию k и площади ножа S, контактирующего с материалом (снегом): 𝑃 = 𝑘𝑆. (3.10) Коэффициент сопротивления резанию – удельная сила, приходящаяся на 1 м2 площади ножа. Естественно, что она также сильно зависит от прочностных характеристик материала (снега), формы ножа, и т.д. В работе [11, стр. 123] приведены коэффициенты сопротивления резанию для рыхлого, плотного молодого типа снега (k = 700…30000 Па). Однако следует иметь в виду, что значение коэффициента сопротивления резанию снега должно характеризоваться внедрением ножа не просто в уплотненный снег (ведь максимальная глубина резания, согласно (рис. 22) составляет 110 мм), а в снег сильно утрамбованный, переходящий в лед! Если верхняя часть ножа будет контактировать со свежевыпавшим, или плотным снегом, то нижняя 29 часть ножа (штифты), будет контактировать с очень плотным, слежавшимся и утрамбованным снегом, если не зацепит мерзлый грунт. Поэтому границы значений коэффициента сопротивления резанию целесообразно принять по источнику [12] специально для уплотненного снега 70000…130000 Па. С учетом описанного бульдозерного эффекта (увеличение энергоемкости резания еще на 30%), k = 91000…169000 Па. Подставляя в (3.9) известные данные, получим: 𝑇34 = 931,95(0,91𝑓л − 0,42) − 95 + 0,00904𝑘 . (3.11) Таблица 3.4 с расчетом Т34 выглядит следующим образом: Таблица 3.4 Т34, Н 505,84 1058,3 fл 0,2 0,02 k, Н/м2 91000 169000 В таблице 3.4 большим значениям коэффициента трения скольжения соответствуют меньшие значение коэффициента сопротивления резанию, и наоборот. Это не ошибка. Более твердый снег и снежный покров всегда тяжелее режется, чем мягкий, но скольжение лыж по нему более свободное, чем по рыхлому снегу. 3.5. СТОЛКНОВЕНИЕ НАРТ, ДВИЖУЩИХСЯ ПРЯМОЛИНЕЙНО НА СКОРОСТИ С ПРЕПЯТСТВИЕМ Для оценки этого случая, так же как и в п. 1.5, 2.5 необходимо воспользоваться теоремой об изменении количества движения материальной точки: «Изменение проекции количества движения точки на какую-либо ось равно проекции на ту же ось импульса силы, действующей на точку за то же время» [4, стр. 298]. Математически данная теорема записана выше (1.18). Время удара в данных условиях определить невозможно из-за ограниченности данных о материале, форме и способе закрепления в почве 30 препятствия, угле наезда на него, характеристиках движения и т.д., поэтому можно ориентировочно принять время удара 𝑡𝑖 = 0,1 с. Практика разбора аварийных ситуаций на автомобильном транспорте показывает, что при скоростях тела выше 80 км/ч время удара принимается до 0,01 с. Считая удар о препятствие неупругим (иное трудно себе представить, ведь не с резиновой же стеной сталкивается карт!), можно принять также, что 𝑣1𝑥 = 0, т.е. столкнувшись с препятствием, нарты останавливаются. Для этих условий можно записать, пользуясь (1.18): −𝑚𝑉 = 𝑇35 𝑡𝑖 , (3.12) где V – скорость поступательного движения нарт до удара (в нашем случае она принимает значение средней Vср и максимальной скоростей Vmax , м/с); 𝑇35 – сила, действующая на собак через упряжь со стороны резко и внезапно остановленных нарт, Н. Знак « – « показывает, что импульс силы направлен противоположно направлению скорости поступательного движения карта до удара. Таким образом, 𝑇35 = − 𝑚𝑉⁄𝑡 = − 95𝑉⁄0,1. (3.13) 𝑖 Подставляя в формулу (3.13) значения средней и максимальной скоростей, получим силу, действующую на собак в процессе столкновения с препятствием, которую занесем в таблицу 3.5. Таблица 3.5 V, м/с Т35, Н 9,17 8711,5 13,89 13195,5 4. АНАЛИЗ ПОЛУЧЕННЫХ ДАННЫХ, СХЕМА ДЕМПФЕРОВАМОРТИЗАТОРОВ 31 Анализ полученных данных удобнее проводить, сведя их в единую таблицу 4.1. Таблица 4.1 Т11, Н Т12, Н Т13, Н Т14, Н Т15, Н Т21, Н Т22, Н Т23, Н Т24, Н Т25, Н Т31 ,Н Т32, Н Т33, Н Т34, Н Т35, Н Минимальное рассчитанное значение параметра 51,5 587,7 161,75 163,23 9628,5 56,41 636,45 167,71 188,22 10545,5 18,64 503,38 113,64 505,84 8711,5 Максимальное рассчитанное значение параметра 309,02 824,1 419,27 397,56 13125 338,45 893,1 449,75 444,87 15973,5 186,39 656,03 281,39 1558,3 13195,5 Анализ таблицы 4.1 позволяет сделать следующие выводы. 1. Пиковые нагрузки собаки испытывают через упряжь во время столкновения карта или нарт с препятствием, причем наибольшие – при столкновении 4-х колесного карта, т.к. масса его наибольшая из всех рассмотренных вариантов. 2. Наибольшие нагрузки при съезде с горы и торможении испытывают собаки через упряжь во время движения наездника на нартах, что объясняется большой силой торможения прицепного элемента. 3. Минимальное рассчитанное значение толкающей силы не стоит брать во внимание при конструировании устройства демпфера-амортизатора, т.к. она в любом случае равна нулю. 32 4. Поскольку пиковые нагрузки при столкновении с препятствием в несколько раз превышают нагрузки на остальных режимах, нет возможности применять демпфер-амортизатор с одинаковыми характеристиками на всех режимах и во всех случаях. Вариация нагрузок (толкающей силы) на пиковых режимах позволяет разделить прицепные элементы на две группы: 3-х колесные карты и нарты (от 13125 до 13195,5 Н) и 4-х колесные карты (15973,5 Н). На всех остальных режимах имеет смысл выделить по толкающей силе тоже две группы: 3-х и 4-х колесные карты (от 824,1 до 893,1 Н) и нарты (1558,3 Н). 5. При конструировании демпферов-амортизаторов следует предусмотреть обязательный запас прочности около 10%. В соответствие с этим требованием, демпферы должны обеспечивать выдерживание пиковых нагрузок для 3-х колесных картов и нарт Т2 = 14500 Н, а для 4-х колесных картов Т2 = 17500 Н. Для всех остальных режимов: для 3-4-х колесных картов Т1 = 980 Н, для нарт Т1 = 1700 Н. 6. Возникновение пиковых нагрузок (столкновение с препятствием) возможно не только при прямолинейном движении, но и во всех остальных случаях (движение в гору, движение с горы и т.д.). Для подсчета общей толкающей силы во время действия пиковой нагрузки необходимо просуммировать силу, возникающую от пиковой нагрузки с силой, действующей относительно постоянно для данного случая движения. Например, столкновение с препятствием нарт на съезде с горы при торможении. Максимальная толкающая сила в этом случае Т = Т34 + Т35 = 1558,3 + 13195,5 = 14753,8 Н. Расчет демпфера необходимо вести, суммируя пиковую нагрузку с относительно постоянно действующей: 𝑇д = 𝑇1 + 𝑇2 . Предлагаемая конструкция сдвоенного (4.1) демпфера-амортизатора учитывает все вышеперечисленные выводы и, кроме того, служит еще и 33 предохранителем на случай разрыва или иного выхода из строя одного из амортизаторов (рис. 23). 3 1 2 Рис. 23. Сдвоенный демпфер-амортизатор: 1 – основной демпфер, работающий на относительно постоянных нагрузках; 2 – усиленный демпфер, включающийся в работу при пиковых нагрузках вместе с основным демпферам; 3 – связка демпферов между собой Расчет каждого из этих амортизаторов ведется на основании закона Гука и общей теории упругости [13]. Удлинение амортизаторов может быть выбрано из опыта эксплуатации. Так, нормальным (без потери управляемости) можно считать удлинение до 0,3 м. Предельным можно считать удлинение до 0,5 м. После удлинения 0,5 м, теряется управляемость как картов всех типов, так и нарт. Возникающая сила упругости демпфера должна полностью уравновешиваться толкающей силой (3-й закон Ньютона), следовательно параметры демпферов подбираются исходя из граничных условий по толкающим силам (вывод 5), рассуждений о максимально возможном удлинении (стр. 33, выше) и сложения пиковых и относительно постоянно действующих толкающих сил (вывод 6). Сила упругости Fу1, действующая от растяжения первого (основного) демпфера на величину Х1: 𝐹у1 = 𝜆1 𝑋1 , (4.2) 34 где 𝜆1 – коэффициент упругости первого демпфера-амортизатора, Н/м. Сила упругости Fу2 , действующая от растяжения второго (пикового) демпфера на величину Х2: 𝐹у2 = 𝜆2 𝑋2 , (4.3) где 𝜆2 – коэффициент упругости второго демпфера-амортизатора, Н/м. Но конструкция сдвоенного амортизатора такова, что второй демпфер включается в работу в тот момент, когда первый уже растянется на величину Х1 = 0,3 м, поэтому совместная сила упругости Fд в момент максимального растяжения второго амортизатора на величину Х2 = 0,2 м: 𝑇д = 𝐹д = 𝜆1 𝑋1 + 𝜆2 𝑋2 , (4.4) где Тд – суммарно действующая нагрузка (4.1); 𝜆1 – найденный из (4.2) коэффициент упругости 1-го демпфера; Х1 – удлинение первого демпфера во время действия суммарной нагрузки (Х1 = 0,5 м); Х2 – удлинение второго демпфера во время действия суммарной нагрузки (Х2 = 0,2 м); 𝜆2 – искомый из (4.4) коэффициент упругости 2-го демпфера. Для трехколесного карта: 1-й демпфер: Fу1 = Т1 = 980 Н; Х1 = 0,3 м; 𝜆1 = Т1 ∕ Х1 = 980 ∕ 0,3 = 3266,67 Н/м. Сдвоенный демпфер: Тд =14500 + 980 = 15480 Н; Х1 = 0,5 м; 𝜆1 = 3266,67 Н/м; Х2 = 0,2 м. 𝜆2 = (Тд – 𝜆1 𝑋1 ) ∕ Х2 = (15480 – 3266,67*0,5) ∕ 0,2 = 69233,32 Н/м. Для четырехколесного карта: 1-й демпфер: Fу1 = Т1 = 980 Н; Х1 = 0,3 м; 𝜆1 = Т1 ∕ Х1 = 980 ∕ 0,3 = 3266,67 Н/м. Сдвоенный демпфер: Тд =17500 + 980 =18480 Н; Х1 = 0,5 м; 𝜆1 = 3266,67 Н/м; Х2 = 0,2 м. 𝜆2 = (Тд – 𝜆1 𝑋1 ) ∕ Х2 = (18480 – 3266,67*0,5) ∕ 0,2 = 84233,33 Н/м. Для нарт: 1-й демпфер: Fу1 = Т1 =1700 Н; Х1 = 0,3 м; 𝜆1 = Т1 ∕ Х1 =1700 ∕ 0,3 = 5666,67 Н/м. Сдвоенный демпфер: Тд = 14500 + 1700 =16200 Н; Х1 = 0,5 м; 𝜆1 = 5666,67 Н/м; Х2 = 0,2 м. 𝜆2 = (Тд – 𝜆1 𝑋1 ) ∕ Х2 = (16200 – 5666,67*0,5) ∕ 0,2 = 66833,33 Н/м. Все полученные данные удобнее представить в виде таблицы 4.2. 35 Таблица 4.2 Т1 = Fу1, Н Т2 = Fу2, Н Тд = Fд=Т1+Т2, Н λ1, Н/м λ1, Н/м 3-х колесный карт 980 14500 15480 3266,67 69233,32 4-х колесный карт 980 17500 18480 3266,67 84233,33 Нарты 1700 14500 16200 5666,67 66833,33 Найденные коэффициенты упругости демпферов и предложенная конструкция сдвоенного демпфера-амортизатора должны обеспечивать выдерживание всех рассчитанных нагрузок. По ходу проведенного исследования необходимо сделать несколько замечаний. 1. Закон Гука справедлив для случаев, когда удлинение демпфера значительно меньше его начальной длины. Выбор начальной длины демпфера не может быть осуществлен расчетным путем, для этого необходимы экспериментальные исследования. Но в любом случае, если максимальное удлинение составляет 0,5 м, начальная длина демпфера не может быть менее 2,0 м. 2. Все расчеты построены на существующих распространенных теориях и методиках, и если таковых не существовало, то подбиралась сходная по условиям (как в случае с расчетом торможения нарт). 3. Необходимость полного компенсирования всей нагрузки демпфером является вопросом спорным, хотя и желательным. Ведь если ставить задачу просто немного сгладить нагрузки, то демпфер должен растягиваться лишь в момент начала действия нагрузки, а затем – быть неупругим. Но решение по этому поводу должно быть выработано в ходе экспериментов. 4. Отличие данных исследований от исследований бельгийских ученых [14] заключается в том, что усилие, возникающее в сцепке между собачьей упряжью и прицепным элементом, рассматривалось не с позиции усилия, 36 которое могут развивать собаки, а с позиции сопротивлений, которые испытывает прицепной элемент в движении. Кроме того, столкновение с препятствием рассчитано не через закон сохранения энергии (когда кинетическая энергия, определяемая полной массой и скоростью движения переходит в потенциальную энергию амортизатора), а через закон сохранения импульса. Описанный в [14] способ может быть удачно применим лишь при исследовании пиковых нагрузок. Все остальные случаи, описанные в данном отчете, остались за границами исследования [14]. Оригинальная конструкция демпфера-амортизатора, предложенная в данном исследовании не похожа на обычные распространенные демпферы и отличается существенной научной новизной. 5. Автор выражает огромную благодарность мастеру спорта международного класса по гонкам на упряжках Панюхину Сергею Юрьевичу за предоставленную возможность провести весьма наукоемкое исследование. ИСТОЧНИКИ ИНФОРМАЦИИ 37 1. http://www.risk.ru/users/irinka/8567/ 2. Мотоцикл. Теория, конструкция, расчет. ∕ С.Ю. Иваницкий, Б.С. Карманов, В.В. Рогожин, А.Т. Волков. М.: Машиностроение,1971. 408 с. 3. Вахламов В.К., Шатров М.Г., Юрчевский А.А. Автомобили: теория и конструкции автомобиля и двигателя. 3-е изд. М.: Академия, 2007. 816 с. 4. Никитин Е.М. Теоретическая механика. 12-е изд. испр. под ред. А.И. Аркуши. М.: Наука, 1988. 336 с. 5. http://ru.wikipedia.org/wiki/Лыжи 6. Трение: http://motodeltaplan.narod.ru/info/spravochniki.htm ∕ info ∕ spravochniki.htm. 7. Аэросани времен войны: http://waralbum.ru/bb/viewtopic.php?id=49&p=4 8. Скалыватели-рыхлители уплотненного снега: http://sdm.str-t.ru/publics/50/ 9. Воскресенский Г.Г. Научные основы проектирования рабочего оборудования для разрушения уплотненного снега на автомобильных дорогах. Автореф. дис. … докт. техн. наук. Хабаровск: Тихоокеанский гос. университет, 2011. 39 с. 10. Машины для земляных работ. ∕ Т.В. Алексеева, К.А. Артемьев, А.А. Бромберг, Р.И. Войцеховский, Н.А. Ульянов. М.: Машгиз, 1959. 428 с. 11. Баловнев В.И. Многоцелевые дорожно-строительные и технологические машины. Омск-Москва: Омский дом печати, 2006. 320 с. 12. Зотов В.А. Механизация зеленого хозяйства. Справочник. М.: Стройиздат, 1985. 440 с. 13. Сила упругости. Закон Гука: http://www.edu.yar.ru/projects/socnav/prep/phis001/dyn/dyn10.html 14. Jean Claude Bams. Safety of dogs on championships. Proposal shock absorbers regulation. Team (JC). Department: FBMC Board. Company: Federation of Belgian Mushers Clubs. 2013. 13 p.