Глава 1. Введение в линейное программирование §1. Экономико
advertisement

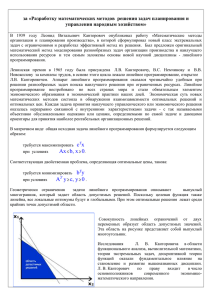
Глава 1. Введение в линейное программирование §1. Экономико-математическая модель Определение 1. Модель - это условный образ какого- либо объекта, приближенно воссоздающий этот объект с помощью какого- то языка ( S t - математическая модель движения). Определение 2. математическое Экономико-математическая описание исследуемого модель экономического – это процесса, следовательно, объект - экономический процесс, язык - классические и специально разработанные методы математики. Такая модель выражает закономерности экономического процесса в абстрактном виде с помощью математических соотношений. Этапы моделирования 1. Ставят цели и задачи исследования и проводят качественное описание объекта в виде экономической модели. 2. Формируют математическую модель объекта. 3. Проводят анализ математической модели. Основные типы моделей: 1. Макроэкономические модели описывают экономику как единое целое, связывая между собой укрупненные материальные и финансовые показатели: валовой национальный продукт (ВНП), потребление, инвестиции, занятость, процентную ставку и т.д. 2. Микроэкономические модели описывают взаимодействие структурных и функциональных составляющих экономики, либо поведение отдельной составляющей в рыночной среде. 3. Теоретические модели являются аппаратом изучения общих свойств экономики и ее составляющих на основе дедукции выводов из формальных предпосылок. 4. Прикладные модели представляют собой аппарат оценок параметров конкретных экономических объектов, выработки рекомендаций для принятия экономических решений и разработки стратегий поведения фирм на рынке. 5. Равновесные модели описывают такие состояния экономики, когда результирующая всех воздействий на нее равна нулю. Как правило, равновесные модели являются дескриптивными, описательными. 6. Оптимизационные модели используются в теории рыночной экономики на производителя микроуровне или фирмы). (оптимизация На деятельности макроуровне потребителя, результат выбора экономическими субъектами рационального поведения может приводить к состоянию относительного равновесия. 7. Статические модели описывают состояние экономических объектов в определенный момент или усреднено за некоторый период времени. При этом все параметры статических моделей полагаются фиксированными величинами, независящими от времени. 8. Динамические модели включают зависимость и взаимосвязи переменных модели во времени. Они используют обычно аппарат дифференциальных и разностных уравнений и вариационного исчисления, где независимой переменной является время. 9. Детерминированные модели предполагают в своей основе только жесткие функциональные связи между переменными модели. 10. Стохастические модели допускают наличие случайных связей между переменными модели. Эти модели используют аппарат теории вероятностей и математической статистики. 11. Модели с элементами неопределенности используются для моделирования ситуаций, когда для определяющих факторов невозможно собрать статистические данные, и их значения не определены. В этих моделях используются моделирования. аппараты теории игр и имитационного §2. Основы линейного программирования Определение 1. Линейное программирование – наука о методах исследования и отыскания наибольшего и наименьшего значений линейной функции, на неизвестные которой наложены линейные ограничения. Примеры задач линейного программирования 1. Задача об использовании ресурсов (задача планирования производства). 2. Задача составления рациона (задача о диете, задача о смесях). 3. Задача об использовании мощностей (или задача о загрузке оборудования). 4. Задача о раскрое материала. 5. Транспортная задача. Рассмотрим пример составления экономико-математической модели. Задача. Хозяйству надо не более 10-ти 3-х тонных и не более 8-ми 5-ти тонных машин. Отпускная ценна машины одной марки 2000 у. д. е., а другой – 4000 у. д. е. Хозяйство может выделить на приобретение машин 40000 у. д. е. Сколько следует приобрести машин каждой марки, чтобы их общая суммарная грузоподъемность была максимальной? х1 -кол-во машин 1-го вида х 2 -кол-во машин 2-го вида целевая функция z=3x1 +5x 2 max при ограничениях х1 10 х2 8 2000х +4000х 40000 2 х 01 1,2 математическая модель задачи §3. Общая задача линейного программирования Пусть задана система m линейных уравнений и неравенств с n переменными: a11 x1 a12 x2 ... a1n xn b1 a x a x ... a x b 2n n 2 21 1 22 2 am1 x1 am 2 x2 ... amn xn bm x1,2 n 0 и линейная функция Необходимо 1 z c1 x1 c2 x2 ... cn xn найти X x1 ; x2 ; x3 ;... ; xn , такое при решение котором линейная системы функция z принимает оптимальное (max или min) значение. Определение 1. Систему (1) называют системой ограничений, а функцию z- линейной или целевой функцией, или функцией цели. Определение 2. Оптимальным решением или оптимальным планом задачи линейного программирования называется такое решение X x1 ; x2 ;... ; xn системы ограничений, при котором линейная функция z принимает оптимальное значение. Определение 3. Если система ограничений состоит из одних неравенств, то считается, что задача линейного программирования задана в стандартном виде; если же из одних уравнений, то задача линейного программирования задана в каноническом виде; если же есть уравнения и неравенства, то задача называется общей. Чтобы перейти от стандартного задания к каноническому виду, вводят дополнительные неотрицательные переменные: со знаком «+», если b, со знаком «-», если b. Пример: Пусть задана общая система ограничений: 2 x1 3x2 5 x x 0 1 2 2 x1 3x2 2 5 x1 x2 3 x x 2 х1 20 1,2 общая задача 2 x1 3x2 5 x x 0 1 2 2 x1 3x2 x3 2 5 x1 x2 x4 3 x x x 2 х1 2 05 1,2,3,4,5 каноническая задача §4. Системы «m» линейных уравнений с «n» переменными В задачах линейного программирования представлены задачи, в которых ранг матрицы А меньше числа переменных, т.е. r A n . Или иначе: максимальное число независимых уравнений системы меньше числа переменных. r A Пусть дана система: a11 x1 a12 x2 ... a1n xn b1 a21 x1 a22 x2 ... a2 n xn b2 a x a x ... a x b mn n m m1 1 m 2 2 а11 а А 21 ат1 а1п а2 п атп а12 а22 ат 2 Атп Будем предполагать, что в данной системе все «m» уравнений независимы, т.е. r A m , m n. Определение 1. Любые «m» переменных этой системы называют основными или базисными, если определитель матрицы коэффициентов при них отличен от нуля. Тогда остальные п т переменных называются свободными. Теорема. переменными Если для системы «m» линейных уравнений с «n» т n ранг матрицы коэффициентов при переменных равен «m», т.е. существует хотя бы одна группа базисных переменных, то эта система является неопределенной (т.е. имеет множество решений), причем каждому произвольному набору значений свободных переменных соответствует одно решение системы. Пример. Решить систему уравнений x1 x2 2 x3 x4 0 2 x1 x2 2 x3 x4 0 т 2 ; п 4 r A 2 1 1 1 2 3 0 r A 2 2 1 Значит, базисных переменных 2. х1 и х2 - будем считать базисными. х3 ; х4 - свободными. х х2 2 х3 х4 1 2 х1 х2 2 х3 х4 3х1 4 х3 4 х1 х3 3 8 х2 2 х3 х4 х3 3 2 х2 х3 х4 3 4 2 Х х3 ; х3 х4 ; х3 ; х4 3 3 свободные базисные Пусть: 1) х3 1 х4 0 , тогда 4 2 х1 ; х2 3 3 4 2 ; ;1; 0 - недопустимое. 3 3 2) х3 0 х4 1 , тогда х1 0; х2 1 0; 1; 0; 1 - опорное. Определение 2. Решение X x1 ; x2 ;... ; xn системы линейных уравнений называется опорным (или допустимым), если оно содержит лишь неотрицательные компоненты. В противном случае решение называется недопустимым. В задачах линейного программирования именно такие решения представляют интерес. Определение 3. Решение системы «m» переменными называется базисным, если все уравнений п т с «n» свободных переменных равны нулю. В случае, если т п систему можно решить методом Гаусса. Если ранг матрицы r A m , то все «m» уравнений являются линейно независимыми, а остальные уравнения являются их линейной комбинацией. Виды решений: 1. 2. r n , то система будет иметь единственное решение. Если r n , то система имеет множество решений, которые Если определяются свободными переменными. 3. Если в процессе исключения неизвестных получилась строка 0 0 0 0 х1 0 х2 §5. b, то система решений не имеет (Ø), так как 0 хп b или говорят система несовместна. Геометрический смысл решения неравенств и систем неравенств Пусть дана система линейных неравенств: а11 х1 а12 х2 b1 а21 х1 а22 х2 b2 Определение 1. Уравнение a11 x1 a12 x2 b1 определяет на плоскости ОХ 1 Х 2 прямую, которая разбивает эту плоскость на две полуплоскости, каждая из которых лежит по одну сторону от прямой. Сама прямая называется граничной и принадлежит обеим полуплоскостям. Определение 2. Координаты точек, лежащих в одной полуплоскости, удовлетворяют неравенству лежащих в другой a11 x1 a12 x2 b1 , полуплоскости, а координаты точек, удовлетворяют неравенству a11 x1 a12 x2 b1 . Аналогично для второго неравенства. Определение 3. Система неравенств удовлетворяет множеству точек х1 ; х2 , лежащих в пересечении полуплоскостей, заданных неравенствами системы. Определение 4. Пересечение плоскостей есть некоторая многоугольная область D, которая называется областью решений системы неравенств. Определение 5. Если область D ограничена, ее называют многоугольником решения системы D D открытая (неограниченная) замкнутая (ограниченная) Определение 6. Если система неравенств противоречива, то область D - пустое множество. Ø Определение 7. Множество решений называется выпуклым, если оно вместе со своими двумя точками содержит весь отрезок, соединяющий эти точки. D D выпуклое невыпуклое Пример 1. Построить множество решений неравенства: 3x1 4 x2 12 0 Рассмотрим прямую : 3 x1 4 x2 12 0 0 4 3 0 x2 3 4 0 Выберем контрольную точку x1 0 0;0 : 0 0 12 0 (ложь). Поэтому решением неравенства является верхняя полуплоскость, не содержащая точку О. Пример 2. Построить множество решений системы неравенств: 5 x1 4 x2 20 2 x 3x 24 2 1 x1 3x2 3 x2 6 x1,2 0 1 : 5 x1 4 x2 20 0 4 5 0 : 2 x1 3 x2 24 2 0 1 2 8 0 3 : x1 3 x2 3 x1 0 3 x2 1 8 x1 2 - 0 6 В С А 4 : x2 6 3 Д 5 4 0 4 Е 1 3 12 2 x1 Для построения области подставляем координаты точки О (0;0) в соответствующие неравенства. 0 0 20 верно 0 0 24 верно О(0; 0) 0 0 3 верно Точки О, А, В, С, Д, Е - вершины области решений или угловые точки. Замечание. При построении области решений системы неравенств могут встречаться и другие случаи. x2 x2 x2 А D открытая область §6. x1 единственная точка x1 Ø Геометрический метод решения задач линейного программирования Рассмотрим задачу линейного программирования в стандартной форме с двумя переменными: a11 x1 a12 x2 b1 a x a x b 21 1 22 2 2 am1 x1 am 2 x2 bm z c1 x1 c2 x2 max min x1 К такой форме может быть сведена каноническая задача с ограничениями в виде уравнений, когда число переменных n больше числа уравнений m на два, т.е. пт2. Определение 1. Множество линейного программирования допустимых решений представляет собой задачи выпуклый многоугольник, а оптимальное решение задачи находится, по крайней мере, в одной из угловых точек этого многоугольника решений. Следовательно, задачу линейного программирования можно сформулировать так: Среди всех точек области D найти ту, которая обращает в max или min целевую функцию Z. x2 x2 В А N Е 0 0 С В Д N x1 0 Z E min Z C max А 0 С x1 Z A min max Ø План решения задачи геометрическим методом 1. Строим вектор N c1 ; c2 - нормальный вектор, он указывает направление возрастания функции. 2. Строим прямую перпендикулярна вектору c1 x1 + c2 x2 = 0 c1; c 2 ( 0) , которая 3. вектора Мысленно перемещаем прямую ( 0) в направлении N c1; c2 , тогда: первая угловая точка встречи 0 с областью D является точкой min, а последняя угловая точка встречи, является точкой max На втором рисунке задача на max решений не имеет, т.е. Z не ограничена сверху (аналогично может быть не ограничен min). Замечания. 1. Если прямая 0 при перемещении совпадает с отрезком области D, то все точки этого отрезка дают решение задачи. В этом случае решений бесчисленное множество. 2. Аналогично решается задача линейного программирования в случае 3-х переменных.