На правах рукописи НЕСТЕРЕНКО ЕКАТЕРИНА АЛЕКСАНДРОВНА МЕТОДИКА СЪЁМКИ КАРЬЕРОВ, ОТВАЛОВ И
advertisement

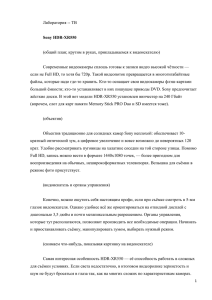
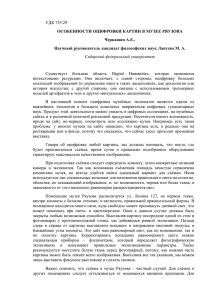
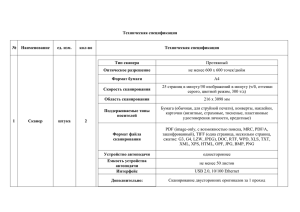
На правах рукописи НЕСТЕРЕНКО ЕКАТЕРИНА АЛЕКСАНДРОВНА МЕТОДИКА СЪЁМКИ КАРЬЕРОВ, ОТВАЛОВ И СКЛАДОВ НА ОСНОВЕ ПРИМЕНЕНИЯ ТРЕХМЕРНЫХ ЛАЗЕРНО-СКАНИРУЮЩИХ СИСТЕМ Специальность 25.00.16 – Горнопромышленная и нефтегазопромысловая геология, геофизика, маркшейдерское дело и геометрия недр Автореферат диссертации на соискание ученой степени кандидата технических наук Санкт-Петербург– 2010 Работа выполнена в государственном образовательном учреждении высшего профессионального образования СанктПетербургском государственном горном институте имени Г.В. Плеханова (техническом университете) Научный руководитель – доктор технических наук, профессор Гусев Владимир Николаевич Официальные оппоненты: доктор технических наук, профессор Тригер Леонид Михайлович кандидат технических наук, доцент Брынь Михаил Ярославович Ведущая организация – ОАО «Институт по проектированию горнорудных предприятий Гипроруда» Защита диссертации состоится 30 июня 2010 г. в 16 ч. на заседании диссертационного совета Д 212.224.08 при СанктПетербургском государственном горном институте имени Г.В. Плеханова (техническом университете) по адресу 199106 Санкт-Петербург, 21-я линия, д. 2, ауд. 1160 С диссертацией можно ознакомиться в библиотеке СанктПетербургского горного института. Автореферат разослан Ученый секретарь диссертационного совета, кандидат технических наук, доцент Ю.Н. КОРНИЛОВ 2 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы исследования: Крупные успехи в области создания средств измерений на основе лазерно-сканирующих съёмок обеспечивают качественно новые возможности в задачах трёхмерного моделирования объектов маркшейдерских съёмок для программных решений горнотехнических задач. Растёт число горных предприятий, заинтересованных во внедрении инновационных технологий – эффективных и высокопроизводительных систем лазерного сканирования. Тем не менее, предложения рынка таких систем провоцирует внедрение их в практику маркшейдерских работ без должного научно-методического и нормативного обоснования. Очевидно, что разработка научно и практически обоснованного методического обеспечения маркшейдерских работ на основе современных достижений в области лазерного сканирования является актуальной задачей, востребованной горным производством. Развитию технологии лазерного сканирования способствовали труды многих ученых, таких как Медведев Е.А., Мельников С.Р., Науменко А.И., Середович В.А. и др. Поиск эффективного и качественного решения маркшейдерских задач на основе автоматизированных и высокопроизводительных лазерно-сканирующих систем послужил основным мотивом представленных исследований. Цель диссертационной работы. Разработка методики производства съёмки средствами лазерно-сканирующих технологий и пространственного моделирования выработок открытых горных работ (уступов, траншей, полутраншей, подъездных путей на карьерах), складов и отвалов на основе данных лазерного сканирования. Основные задачи исследований: - оценка и анализ существующего опыта лазерно-сканирующих съёмок карьеров, отвалов и складов; - разработка и обоснование количественных критериев, определяющих затраты, качество и полноту лазерно-сканирующей съёмки открытых горных выработок, отвалов и складов; - обоснование методических рекомендаций и требований к планированию и проведению лазерно-сканирующих съёмок открытых горных выработок, складов и отвалов; - разработка рекомендаций по пространственному моделированию выработок открытых горных работ, складов и отвалов для решения основных горнотехнических задач; - обоснование методов оценки погрешностей получаемых пространственно-цифровых моделей отвалов и складов. 3 Идея работы. С целью повышения эффективности съёмки карьеров, отвалов и складов следует использовать аналитические модели съёмочного процесса, созданные на основе лазерно-сканирующих систем. Научная новизна работы: Предложены аналитические модели геометрических построений взаимного положения лазерного сканера и объекта для определения количественных параметров технологического процесса лазерносканирующей съёмки, позволяющей оптимизировать съёмки конкретных объектов (карьеров, отвалов, складов). Для оценки точностных параметров создаваемых пространственных моделей карьеров, отвалов и складов установлены аналитические зависимости погрешности определения объёмов от режимов плотности сканирования. Научные положения, выносимые на защиту: 1) разработка методики лазерно-сканирующей съёмки открытых горных работ должна базироваться на классификации, позволяющей оптимизировать съёмочный процесс за счёт комплексного учёта классификационных признаков; 2) количественные параметры технологического процесса съёмки должны быть обоснованы применением специальных аналитических моделей геометрических построений взаимного положения лазерного сканера и объектов съёмки; 3) обоснование точности определения объёма склада полезного ископаемого должно быть построено на аналитических зависимостях, определяемых из моделирования измерительных процессов съёмок. Методика исследований. Теоретические методы (наименьших квадратов, теория ошибок измерений) использовались для обоснования оценки погрешностей получаемых пространственноцифровых моделей отвалов и складов. Экспериментальные методы (анализ данных экспериментальной сканерной съемки карьера, модельные исследования) позволили разработать рекомендации по пространственному моделированию открытых горных выработок, складов и отвалов. Достоверность и обоснованность результатов работы подтверждается согласованностью теоретических с полученными практическими результатами, их внедрением в производственную деятельность Научно-производственного предприятия «Бента», что подтверждено актом о внедрении. 4 Научное значение работы - разработаны аналитические модели геометрических построений взаимного положения лазерного сканера и объектов съёмки; - выполнены исследования точности результатов наземного лазерного сканирования; - разработана методика проведения лазерно-сканирующих съёмок и методика создания трехмерных моделей объектов карьеров, отвалов и складов по данным наземного лазерного сканирования. Практическое значение работы. Определены оптимальные параметры проведения лазерно-сканирующей съёмки и разработана методика создания трехмерных моделей объектов карьеров, отвалов и складов по данным наземного лазерного сканирования. Реализация выводов и рекомендаций работы Основные положения диссертационной работы рекомендуются к внедрению на карьерах общераспространённых полезных ископаемых Ленинградской области (карьеры ОАО «Рудас», карьеры ОАО «Победа-ЛСР», карьер ОАО «Ленинградсланец»), на карьерах Ковдорского ГОКа, ОАО «Апатиты». На основе результатов проведённых исследований будут сформулированы рекомендации по выполнению сканерной съёмки для решения практических задач. Практические результаты рекомендуются к внедрению в учебный процесс. Апробация работы. Результаты исследований докладывались на научно-технической конференции студентов, аспирантов и молодых ученых “Проблемы природопользования” (СПГГИ(ТУ), апрель 2007 г.), конференции Краковского научно-технического университета (Польша, декабрь 2008 г.), Научно-практической конференции молодых учёных и специалистов “Инновационное развитие горнометаллургической отрасли” (Троицк, ноябрь 2009 г.),научный симпозиум “Неделя горняка-2010” (Москва, МГГУ, 2010 г.), научный семинар “Актуальные проблемы применения современных средств получения и обработки геопространственных данных” (СПГГИ(ТУ), март 2010 г.) и на заседаниях кафедры “Маркшейдерское дело” СПГГИ(ТУ). Личный вклад автора - проведение анализа современных способов съемок карьеров, отвалов и складов и требований нормативных документов к точности их выполнения; - разработка аналитических моделей для определения количественных параметров технологического процесса лазерного сканирования, позволяющих оптимизировать съёмки конкретных объектов; 5 - установление аналитических зависимостей погрешности определения объёмов от режимов плотности сканирования. Публикации. Основное содержание работы отражено в 6 публикациях, 4 из которых в изданиях, рекомендованных ВАК. Объем и структура работы. Диссертация изложена на 149 страницах машинописного текста, содержит 4 главы, введение, заключение, библиографический список из 82 наименований. В работе 87 рисунков и 5 таблиц. ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ В первой главе выполнен анализ современных способов съемок карьеров, отвалов и складов, требований нормативных документов к точности их выполнения. Приведены общие сведения о наземной сканерной съемке, выполнен анализ возможностей ее применения при решении основных задач маркшейдерского обслуживания на карьерах. Во второй главе приведена классификация карьеров и отвалов, основанная на параметрах, имеющих значение при сканировании. Представлены методы оптимизации процесса съёмки карьеров, складов и отвалов с использованием технологий наземного лазерного сканирования за счёт минимизации числа скан-позиций. Третья глава посвящена исследованию процессов накопления погрешностей съёмки лазерно-сканирующими системами при определении объёма склада полезного ископаемого. В четвертой главе описаны основные программные пакеты, используемые для работы с наземными лазерными сканерами. Приведена методика проведения лазерно-сканирующих съёмок и этапы обработки результатов сканирования с целью получения трёхмерной модели карьера. Основные результаты исследований отражены в защищаемых положениях: 1. Разработка методики лазерно-сканирующей съёмки открытых горных работ должна базироваться на классификации, позволяющей оптимизировать съёмочный процесс за счёт комплексного учёта классификационных признаков Система для наземного лазерного сканирования состоит из наземного лазерного сканера и полевого персонального компьютера со специализированным программным обеспечением. Сканер состоит из лазерного дальномера, адаптированного для работы с высокой частотой, и блока развертки лазерного луча. В основу работы лазер6 ных дальномеров, используемых в наземном лазерном сканере, положены импульсный и фазовый безотражательные методы измерения расстояний. Формой представления результатов наземного лазерного сканирования является массив точек лазерных отражений от объектов, находящихся в поле зрения сканера, с пятью характеристиками, а именно пространственными координатами (X, Y, Z), интенсивностью и реальным цветом. Проведение съёмки карьеров, складов полезного ископаемого (отвалов вскрышных пород) с использованием наземных лазерносканирующих систем подразумевает учёт ряда параметров снимаемых объектов, не играющих роли при осуществлении съёмки традиционными способами, например, формы объекта. В связи с этим предлагаются классификации, разделяющие карьеры, отвалы и склады по признакам, отвечающим за выбор оптимального режима сканирования (табл. 1,2). Таблица 1 Классификация отвалов и складов Классификационный признак Форма Объём Число ярусов Рельеф местности отвального поля Высота Типы отвалов Причина использования Правильной/ неправильной формы Вытянутой/ невытянутой формы до 20 тыс.м3 20-50 тыс.м3 50-100 тыс.м3 100-200 тыс.м3 200-500 тыс.м3 500-1000 тыс.м3 1000-2000 тыс.м3 более 2000 тыс.м3 Одноярусные Двухъярусные Многоярусные Равнинные Нагорные Выбор оптимального (в отношении точности и скорости) режима сканирования и числа станций Выбор оптимального (в отношении скорости и точности*) режима сканирования, удалённости от снимаемого объекта до 50 м больше 50 м 7 Выбор оптимального числа и местоположения станций для избежания мёртвых зон Необходимость учёта рельефа дна для верного подсчёта объёма породы (полезного ископаемого) Выбор оптимального (в отношении точности и скорости) режима сканирования, выбор числа станций Классификационный признак Порода, составляющая отвал (склад) Устойчивость откосов Продолжение табл.1 Типы отвалов Причина использования С нормальным коэффициентом отражения С низким коэффициентом отражения Необходимость учёта для корректировки результатов съёмки (различный коэффициент отражения, наличие/отсутствие пыли) Выбор безопасного местоположения станций (удалённость точки стояния от нижних контуров отвала) Устойчивые Неустойчивые *Примечание: допустимая разность основного и контрольного определения объема уменьшается с уменьшением объёма отвала Таблица 2 Классификация карьеров Классификационный признак Форма Число уступов Угол борта Добываемая порода Технология основных производственных процессов Типы карьеров Причина использования Правильной/ неправильной формы Вытянутой/ невытянутой формы С одним уступом С двумя уступами С числом уступов больше пяти Пологие (20˚-30˚) Крутые (30˚-60˚) Выбор оптимального (в отношении точности и скорости) режима сканирования и числа станций Выбор оптимального числа и местоположения станций для избегания мёртвых зон С нормальным коэффициентом отражения С низким коэффициентом отражения (<30%) Способом БВР Экскаваторным Гидромеханизация Выбор оптимального (в отношении точности и скорости) режима сканирования, выбор числа станций Необходимость учёта для корректировки результатов съёмки (различный коэффициент отражения, наличие/отсутствие пыли) Выбор оптимального местоположения станций для обеспечения безопасности съёмки 2. Количественные параметры технологического процесса съёмки должны быть обоснованы применением специальных аналитических моделей геометрических построений взаимного положения лазерного сканера и объекта съёмки При использовании для съёмки лазерно-сканирующих систем перед началом собственно съёмки ориентировочно намечаются по- 8 зиции установок сканера (скан-позиции) относительно снимаемого объекта из расчёта охвата съёмкой возможно большей части объекта. При этом изложенный критерий не обладает достаточной степенью объективности и не позволяет минимизировать объём работы лазерным сканером без потери части съёмочной информации. Учитывая, что при съёмке лазерным сканером получается большой объём избыточных измерений о снимаемом объекте, актуальной является задача оптимизировать количество получаемой такой съёмочной информации об объекте. Так, число станций сканирования (сканпозиций) должно быть достаточным для полного охвата снимаемого объекта, но при этом необходимо минимизировать их количество для уменьшения времени проведения съёмки и количества измерительной информации о снимаемом объекте. Для решения задачи оптимизации съёмочных работ лазерным сканером условно были взяты склады полезного ископаемого (отвалы вскрышных пород) в виде правильных геометрических форм: конус, призма с трапециевидным сечением, ограниченная с двух сторон усечёнными конусами, Г-образная призма. При съёмке сканером в обзорном режиме зона сканирования представляет собой полусферу с радиусом r, равном максимальной измеряемой дальности. Для лазерных сканеров (ЛС) с фазовым дальномером r=50-80 м, а для имеющих импульсный дальномер r=300-1500 м. Измеряемая максимальная дальность фазовых сканеров меньше, чем у импульсных, но производительность и точность съёмки значительно выше. Поэтому способ оптимизации лазерносканирующей съёмки разрабатывался в первую очередь для фазовых лазерно-сканирующих систем. Установка сканера относительно снимаемого объекта определяется параметром l, расстоянием до нижнего контура снимаемого объекта (отвала). Допустимое значение этого параметра составляет rmin<l<r, где rmin – минимальное измеряемое расстояние лазерным сканером. Конкретные значения l выбираются, исходя из угла падения лазерного луча к сканируемой поверхности откоса отвала δ, при котором и меньше которого точки лазерных отражений от снимаемой поверхности откоса не возвращаются в приёмный тракт прибора. Из анализа опыта съёмки лазерным сканером гидротехнических тоннелей Зеленчукской ГЭС этот угол составляет δ≈8˚. Используя этот угол, находится значение расстояния l от сканера до объекта, при котором съёмкой захватывается верхняя часть отвала. 9 В случае, если снимаемый объект (склад, отвал) имеет форму усечённого конуса, то расстановка скан-позиций вокруг него будет соответствовать рис.1а. а) б) Рис.1. Расстановка сканерных станций вокруг объекта (а) и их взаимное расположение (б) Необходимо расположить точки установки сканера, во-первых, на расстоянии l, учитывающем охват съёмкой по высоте и, вовторых, таким образом, чтобы дальности действия сканера (окружности радиуса r) соприкасались в точках пересечения окружностей радиусом r с внешним (нижним) контуром объекта, т.е. с окружностью радиуса R (точки А и В на рис.1б). Отсюда количество станций (n) можно определить из решения геометрической задачи (схема на рис.1б) с использованием теоремы косинусов по формуле: n R (R l) 2 r 2 arccos 2 R( R l ) 2 (1) Областью определения функции является выражение rmin<l<r, где rmin – минимальное измеряемое расстояние лазерным сканером, что обосновывает приведённые выше допустимые значения данных переменных. Для формирования зон перекрытия, в пределах которых во время съёмки будут устанавливаться марки внешнего ориентирования, в формулу 1 необходимо подставить дальность сканирования r на 10% меньше максимальной. Тогда при производстве съёмки от точек соприкосновения уменьшенных радиусов сканирования (от то- 10 чек А и В на рис.1б) в обе стороны сформируются зоны перекрытия шириной 0,2r, в пределах которых устанавливаются марки внешнего ориентирования и которые будут являться общими для соседних сканов. В результате можно будет решить задачу регистрации сканов в единой системе координат. Следующим изучаемым объектом является призма с трапециевидным сечением, ограниченная с двух сторон усечёнными конусами (рис.2). Исходя из того, что геометрически нижняя граница данного тела имеет вид прямоугольника и двух полуокружностей, можно вывести формулу определения n: Рис.2.Изучаемый объект n L r2 l2 R (R l) 2 r 2 arccos 2 R( R l ) 2 (2) Областью определения данной функции является выражение rmin<l<r, где rmin – минимальное измеряемое расстояние лазерным сканером. В процессе производства открытых горных работ образуются отвалы разнообразной сложной формы. Для изучения оптимального количества скан-позиций была рассмотрена одна из упрощённых форм отвала, условно названная Г-образной. Подобные отвалы могут быть изучены как две призмы трапециевидного сечения с прямоугольным основаниями, ограниченными с двух сторон частями усечённых конусов (рис.3а). Из геометрии нижней границы изучаемого объекта следует формула (3), областью определения данной функции является выражение rmin<l<r: 11 n' L1 r2 l2 L2 r2 l2 R ( R2 l ) 2 r 2 4 arccos 2 2 R2 ( R2 l ) 2 arccos R12 (3) ( R1 l ) 2 r 2 2 R1 ( R1 l ) а) б) Рис.3.Нижняя граница изучаемой Г-образной призмы (а) и карьера (б). В некоторых случаях встаёт вопрос о правомерности использования данной формулы: если значения L1 и L2 объекта приблизительно равны между собой, а также, если угол поворота сильно выполаживается. При совпадении этих двух условий форма объекта (склада, отвала) стремится к полусферической, а его нижняя граница приобретает очертания окружности. Опытным путём было установлено, что при соотношении L1 1,5L2 использование формулы 1 приведёт к более точным результатам. При соотношении L1 1,6L2 количество станций, определяемое по формуле 1 и по формуле 3 приблизительно одинаково. Если же разница в соотношении длин сторон превышает заявленный предел (1,6), то объект уже рассматривается как вытянутый и количество станций определяется по формуле 3. Использование формулы (3) позволяет определить число станций, необходимых для полного охвата нижней границы объекта в процессе съёмки с заданной точностью. Но эта формула составлялась на основе геометрически правильных фигур: прямоугольников и окружностей. На практике отвалы имеют сильно размытые грани- 12 цы, к тому же не учитывается тот факт, что поворот объективно не является четвёртой частью окружности. Подобные допущения вынуждают рассмотреть возможность введения коэффициента, который бы приближал реальное число станций к гипотетическим, посчитанным по формуле 3. В результате построения в программной среде AutoCAD моделей объектов различных размеров было выявлено, что подобный коэффициент приблизительно равен 0,9. Т.е. окончательное число станций равно n 0,9n' . В отношении расстановки станций при сканировании песчаных карьеров, имеющих один уступ, геометрически схема определения их количества остаётся прежней (рис.1б). Соответственно, и формулы 1 и 2 не претерпевают изменений. В случае, если карьер имеет сложную форму, и его нижнюю границу можно условно разбить на прямоугольник и три полуокружности, как показано на рис. 3б), то формула 3 примет вид формулы 4. n L r2 l2 R ( R1 l ) 2 r 2 arccos 1 2 R1 ( R1 l ) 2 R 2 ( R2 l ) 2 r 2 2 arccos 2 2 R2 ( R2 l ) (4) R2 r2 l2 Областью определения данной функции является выражение rmin<l<r. При планировании съёмки верхней части отвала точки установки лазерного сканера относительно друг друга определяют, исходя из полноты охвата и их расположения относительно контура верхней части отвала и в целях безопасности наблюдателя на расстоянии не менее 20 м. Количество точек установки зависит от площади снимаемой верхней части отвала. Моделирование размещения точек установки лазерного сканера выявило следующую закономерность. Учитывая, что геометрический параметр R(R1) является одним из параметров усечённого конуса (рис.1а), призмы с трапециевидным сечением (рис.2), Г-образной призмы (рис.3а), то по результатам моделирования были получены зависимости общего количества станций установки nO от параметра R. Так, для съёмки верхней части отвала, близкого по форме к усечённому конусу, nO определяется следующим образом: 13 при R≤r nO=n+1; при r<R≤3r nO=2n-5; при 3r<R≤4r nO=3n-15; при 4r<R≤5r nO=4n-30; при 5r<R≤6r nO=5n-45 и т.д., где n – число скан-позиций, определяемое по формуле 1. Для отвалов, близких по форме к призме с трапециевидным сечением или Г-образной призме общее количество установок сканера nO определяется из следующей закономерности: при R≤2r nO=2n-5; при 2r<R≤3r nO=3n-15; при 3r<R≤4r nO=4n-30; при 4r<R≤5r nO=5n-45; при 5r<R≤6r nO=6n-60 и т.д., где n – число скан-позиций, определяемое по формулам 2 для отвалов в форме призмы с трапециевидным сечением и 3 для отвалов в форме Г-образной призмы соответственно. Для последнего объекта в полученную схему следует вместо R подставлять R1. При выполнении контрольных съёмок отдельных участков карьера, складов полезного ископаемого, а также при съёмке геометрических параметров конструктивных элементов зданий, сооружений, архитектурно-исторических памятников возникает задача выполнения этих работ с более высокой и определённой точностью. Для лазерно-сканирующих систем фазового типа измерения дальности (Imager 5006, FARO LS 880, Leica HDS 6000) погрешность съёмки (mc) зависит от дальности (радиуса) сканирования (r) и свойств отражающей способности поверхности снимаемого объекта (Iотр) mc=f(r, Iотр). Эта зависимость приведена в технических паспортах этого типа лазерных сканеров. Следовательно, задавая радиусы съёмки при определённой отражающей способности поверхности снимаемого объекта, можно определить, какая им будет соответствовать погрешность съёмки. Затем, используя выбранный радиус съёмки в изложенном выше способе её оптимизации, можно запланировать съёмку упомянутых объектов с наперёд заданной погрешностью. 14 3.Обоснование точности определения объёма склада полезного ископаемого должно быть основано на аналитических зависимостях, полученных из моделирования измерительных процессов съёмок. Известны следующие способы определения объёмов и массы породы и полезного ископаемого: способ горизонтальных сечений, способ вертикальных сечений, способ объёмной палетки и способ правильных геометрических фигур. При использовании лазерно-сканирующих систем при съёмке складов полезного ископаемого (отвалов, насыпей и др.) происходит накопление погрешности. Причём наиболее полную оценку точностных параметров лазерно-сканирующей съемки можно сделать на примере определения объема. В этом случае, независимо от применяемой измерительной техники, определение объема разбивается на два процесса: - собственно съемка объекта, объем которого надо определить, и моделирование снятой поверхности; - определение объема путем вписывания элементарных объемов в пространство, ограниченное этой поверхностью. Отсюда общая погрешность определения объема должна определяется с учетом закономерностей накопления погрешностей измерений внутри каждого из приведенных процессов. Закономерности накопления погрешностей анализировались на модели маркшейдерскогеодезических измерительSi Si+1 S N ных процессов тахеометричеhN+1 S3 ской съемки, с дискретным получением точек при съемке S2 S1 hi hi+1 склада (отвала, насыпи). Измерительные процессы лаh4 зерно-сканирующими систеh h1 h2 3 мами моделировались на базе модели измерительных проРис. 4. Схема определения объе- цессов традиционной съемки ма склада полезного ископаемого путем увеличения плотности способом вертикальных сечений съемочных точек внутри этой базовой модели (рис.4). На полученной таким образом модели изучались закономерности накопления погрешностей измерений при тотальной съемке лазерносканирующими системами. 15 де: Запишем функцию определения объема склада в следующем виS1 S S S S h2 1 h2 2 h3 2 h3 3 3 2 2 2 2 S S S hi1 i hi1 i1 hN 1 N 2 2 3 V h1 Используя формулу средней квадратической погрешности оцениваемой функции, выраженную через средние квадратические погрешности аргументов, была получена формула средней квадратической погрешности определения объема склада MV: 2 2 2 2 n1 n2 h h 5 5 M V2 1 mS2 hi21 mS2 N 1 mS2 S1 mh2 Si21 mh2 S N mh2 3 6 6 3 i 1 i 1 где S i - площади сечений, i = 1, 2, 3, … , n; hi - расстояния от границ склада полезного ископаемого до ближайших сечений и между сечениями, i = 1, 2, 3, … , N+1 (рис.4); m S2 - средняя квадратическая ошибка определения площади; m h2 - средняя квадратическая ошибка определения расстояния hi . Положим, что S1 S 2 S 3 S и h1 h2 h3 h , тогда M V2 0,2h 2 mS2 ( N 1)h 2 mS2 0,8S 2 mh2 ( N 2) S 2 mh2 ( N 1)( h 2 mS2 S 2 mh2 ) Параметр hi при съёмке лазерно-сканирующими системами задаётся при обработке результатов сканирования, поэтому m h2 =0. Отсюда M V2 ( N 1 )h 2 mS2 Исходя из того, что площадь вертикального сечения можно найти по формуле S 1 n xi yi 1 yi 1 , погрешность определения 2 1 площади получается по формуле 16 mS2 mL2 n yi 1 yi 1 , 2 где mL mx2 m y2 ; n – число снимаемых точек в сечении; m x2 и m y2 - средние квадратические ошибки определения приращения по горизонтальной оси X и по вертикальной оси Y соответственно. учитывая, что приращения xi и yi можно получить тригонометрическим нивелированием через измеренные расстояния Li и вертикальные углы δi на съемочные точки вертикальных сечений, m x2 и m y2 определяются следующим образом: 2 m2 2 2 n m Cos L Sin2 l 2 2 m2 m2 m 2y nSin2 ml2 nCos2 L2 2 n ml2 Sin2 2 L2 Cos2 m x2 nCos2 ml2 nSin2 L2 m2 где mL – общая погрешность измерений; ml – погрешность измерений расстояний Li; mδ – погрешность измерений вертикальных углов δi; ρ = 206265. Значение mS позволяет производить расчёты ошибки определения объёма MV, а также относительной ошибки mV и изучить влияние на эти величины количества вертикальных сечений, при сканировании представляющих собой движение лазерного луча в вертикальной плоскости. Информация о числе сечений, при котором изучаемые ошибки будут минимальны, позволит производить съёмку объекта (в данном случае отвалов, насыпей и складов) в оптимальном режиме по точности последующего определения объёма. Расчёты проводились для нескольких форм отвалов: вытянутая призма, изометрическая призма, полусфера и клиновидная призма. Это формы элементарных объёмов, вписываемых в пространство, ограниченное поверхностью объекта. В ходе исследований была выведена также зависимость между габаритными размерами объектов и характера влияния числа вертикальных сечений на ошибку определения объёма. Все результаты расчётов были отражены на построенных трёхмерных графиках зависимости между абсолютной и относительной погрешностью определения объёма от количества и площади вертикальных сечений MV=f(n,S), mV=f(n,S), а также на 17 двухмерных графиках зависимости указанных погрешностей от количества вертикальных сечений MV=f(n)и mV=f(n). Результатом исследований является получение методических указаний (табл.3) по производству наземной лазерно-сканирующей съёмки, в которых отражена информация о зависимости погрешности определения объёма объекта (склада, отвала, насыпи) от его параметров и числа вертикальных сечений, позволяющая минимизировать влияние этой величины на результат съёмки и оптимизировать плотность съёмки лазерным сканером. Таблица 3 Методические указания по производству наземной лазерносканирующей съёмки № п/ п Форма снимаемого объекта 1 2 3 вытянутая 4 5 6 изометрическая 7 8 9 полусферическая 10 11 12 клиновидная Размер снимаемого объекта до 100 м 100-1000 м более 1000 м до 100 м 100-1000 м более 1000 м до 100 м 100-1000 м более 1000 м до 100 м 100-1000 м более 1000 м Число сечений, n Число ТЛО, млн.точек 800-900 1000-1200 1500 10,8-12,15 13,5-16,2 20,25 Приблизительная величина погрешности определения объёма, mV 0,38-0,9 0,01-0,05 0,002 500-700 700-800 900 6,75-9,45 9,45- 10,8 12,15 0,03-0,05 0,0013-0,005 0,0005 1000 2000 5000 13,5 27,0 67,5 0,018 0,0001 0,00001 5000-6000 7000-8000 8000 67,5-81,0 94,5-108,0 108,0 0,8-2,5 0,1-0,3 0,04 ЗАКЛЮЧЕНИЕ Результаты исследования и их практическая реализация представляют собой законченную научно-квалификационную работу, в которой решена актуальная научно-техническая задача – разработка методики съёмки карьеров, отвалов и складов, основанной на оптимизации съёмочного процесса за счёт учёта взаимного расположения сканера и объектов съёмки, использовании разработанной геометрической классификации, уменьшении погрешности определе- 18 ния объёма снимаемого объекта. Предложенная методика охватывает все этапы съёмочного процесса, включая предварительный анализ снимаемого объекта и постобработки полученных результатов с конечной целью получения трёхмерной, достоверной и информативной моделью карьера (склада). Использование разработанных аналитических моделей позволяет сократить время проведения наземной лазерно-сканирующей съёмки. Основные научные и практические результаты работы заключаются в следующем: - рассмотрена возможность применения технологий лазерносканирующих систем при решении основных задач маркшейдерского обеспечения на карьерах; - разработана классификация складов и отвалов, основанная на параметрах, имеющих значение при съёмке наземными лазерными сканерами; - на основании разработанных аналитических моделей геометрических построений взаимного положения лазерного сканера и объектов съёмки обоснована возможность оптимизировать процесс сканирования карьеров, отвалов и складов в зависимости от конфигурации и размеров снимаемых объектов за счёт следующих факторов: размещения сканера от снимаемого объекта на расстоянии, позволяющем произвести съёмку отвала по высоте; минимизации числа точек стояния сканера; - выведена формула средней квадратической погрешности функции определения объёма склада (отвала) и найдено значение средней квадратической ошибки определения площади вертикального сечения; установлена зависимость ошибки определения площади одного сечения от числа образующих его точек; - исследована зависимость ошибки определения объёма склада полезного ископаемого от количества вертикальных сечений и формы объекта, выявлены параметры сканирования, позволяющие учитывать эту зависимость с целью минимизации указанной погрешности; - предложена методика построения цифровой модели карьера по результатам наземной лазерно-сканирующей съёмки с учётом всех разработанных рекомендаций по оптимизации съёмочного процесса. Основные результаты диссертации изложены в статьях: 1) Правдина Е.А.Применение лазерно-сканирующих технологий при маркшейдерском обеспечении горных работ на карьерах // Записки Горного института. – 2008. - т.173. – С.68-70; 19 2) Правдина Е.А Исследование процессов накопления погрешностей съёмки лазерно-сканирующими системами/ Е.А.Правдина, В.Н.Гусев, А.И.Науменко, С.В.Кайгородов // Маркшейдерский вестник. - 2008. - №4(66). - С.17-21; 3) Нестеренко Е.А Исследование возможностей фиксации сдвиговых деформаций лазерно-сканирующей системой Imager 5006 // Вестник Южно-российского государственного технического университета. – 2008.- №1. – С.50-55; 4) Nesterenko Ekaterina Dependence of dump volume determination error on vertical sections number at the laser scanner survey research// Materialy XLIX Sesji Pionu Gorniczego. - Krakow,Poland.2008. –P.88; 5) Нестеренко Е.А Оптимизация лазерно-сканирующей съёмки/ Е.А.Нестеренко, Е.М.Волохов, В.Н.Гусев // Маркшейдерский вестник. – 2009. - №6. – С.38-43; 6) Нестеренко Е.А Построение цифровой модели карьера по результатам наземной лазерно-сканирующей съёмки/ Е.А.Нестеренко, А.И.Науменко, В.Н.Гусев // Маркшейдерский вестник. – 2010. - №1. – С.45-49. 20