1.1. Объекты игры «Виртуальный футбол
advertisement

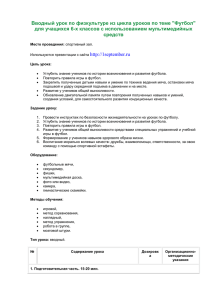
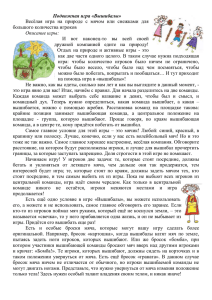
Санкт-Петербургский государственный университет информационных технологий, механики и оптики Кафедра «Компьютерные технологии» А. А. Кошевой Применение генетического программирования для генерации автоматов, управляющих роботами в игре «Виртуальный футбол» Бакалаврская работа Руководитель – А. А. Шалыто Санкт-Петербург 2009 ОГЛАВЛЕНИЕ Оглавление ....................................................................................................... 2 Введение........................................................................................................... 3 Глава1. Постановка задачи............................................................................. 4 1.1. Объекты игры «Виртуальный футбол» ............................................. 4 1.2. Физическая модель .............................................................................. 4 1.2.1. Физические характеристики объектов........................................ 5 1.2.2. Модель столкновений ................................................................... 5 1.2.3. Физические характеристики игроков ......................................... 6 1.3. Правила игры ........................................................................................ 6 1.3.1. Начало игры ................................................................................... 6 1.3.2. Разведение мяча ............................................................................ 6 1.3.2. Процесс игры ................................................................................. 6 1.3.3. Блокировка мяча ........................................................................... 6 1.3.4. Условие засчитывания гола ......................................................... 6 1.3.5. Конец игры .................................................................................... 7 1.4. Технология создания робота в среде «Виртуальный футбол» ........ 7 1.4.1. Формат роботов в игре «Виртуальный футбол» ....................... 7 1.4.2 Robot.java ........................................................................................ 7 Глава 2. ............................................................................................................. 9 ВВЕДЕНИЕ ГЛАВА1. ПОСТАНОВКА ЗАДАЧИ Игра для программистов «Виртуальный футбол» представляет собой платформу, симулирующую игру роботов в футбол. Эта платформа написана на Java – одном из наиболее распространенных и доступных объектноориентированных языков программирования. В этой главе приводится краткое описание данной платформы. 1.1. Объекты игры «Виртуальный футбол» Рабочее пространство игры является прямоугольным полем. На левом и правом крае этого поля расположены ворота. По середине поля размечен центральный круг заданного радиуса. На рисунке 1 представлена схема игрового поля. Рис. 1. Схема игрового поля Динамическими объектами игры являются игроки и мяч. Игроки и мяч представляют собой объекты цилиндрической круглой формы. Игроки делятся на две команды, каждая из которых стремится защитить свои ворота и забить гол в чужие. 1.2. Физическая модель Физическая модель игры «Виртуальный футбол» является упрощенной моделью игры роботов цилиндрической формы на плоском прямоугольном поле с воротами, ограниченным бортами. 1.2.1. Физические характеристики объектов Каждый динамический объект в любой момент игры обладает такими физическими характеристиками как положение и скорость. Игроки также обладают ускорением, максимальной развиваемой скороcтью и максимальной угловой скоростью при совершении поворота. Этими ограничениями обеспечивается приближение физической модели игры к жизни. Также игроки и мяч обладают собственной массой, которая влияет на траекторию движения, изменяющуюся в результате столкновения данных объектов. 1.2.2. Модель столкновений Столкновение мяча и игроков обрабатываются как абсолютно упругие столкновения объектов круглой формы без потери энергии. После соударения мяча или игрока со стенкой скорость движения первого сохраняется, а направление движения изменяется по правилу «угол падения равен углу отражения». Угол падения в данном случае является углом между скоростью движения объекта и плоскостью стенки в момент соударения. Рис. 1 иллюстрирует данный случай. Рис. 1. Соударение объекта со стенкой 1.2.3. Физические характеристики игроков Как было упомянуто ранее, игроки обладают заданным ускорением. Практически это означает, что игрок не может изменить свою скорость в заданный промежуток времени на значение, по абсолютной величине превышающее заданную константу для игры. Также игрок не может изменить угол направления движения на величину, большую заданной. 1.3. Правила игры 1.3.1. Начало игры Игра начинается с разведения мяча в середине поля. Первый игрок команды, защищающей левые ворота является разводящим в данном случае. 1.3.2. Разведение мяча Мяч помещается в центральную точку поля. Разводящий игрок находится в случайной точке центрального круга, в его половине, ближайшей к обороняемым воротам. Остальные игроки обеих команд находятся каждый на своей половине поля, не включая зону центрального круга. Положения игроков случайны, а распределение по области, разрешенной для нахождения в момент вбрасывания, является равномерным по ней. 1.3.2. Процесс игры Игрокам разрешены любые столкновения как с мячом, так и с противником. 1.3.3. Блокировка мяча В процессе игры, в следствие работы алгоритма роботов, может возникнуть такая ситуация, что мяч будет заблокирован одним или несколькими игроками в углу, или у ограничительной стенки поля. В данном случае производится принудительное разведение мяча в середине поля. Разводящая команда не меняется с момента последнего разведения. 1.3.4. Условие засчитывания гола При касании мячом левого или правого края поля в том месте, где расположены ворота, команде, защищающей их, засчитывается пропущенный мяч. Команде-противнику в этом случае прибавляется одно очко к счету. После этого происходит разведение мяча игроком, представляющей команду, пропустившую мяч. 1.3.5. Конец игры Конец игры наступает по окончанию отведенного для нее времени. Этот параметр является изменяемым значением игры и задается до ее начала. 1.4. Технология создания робота в среде «Виртуальный футбол» 1.4.1. Формат роботов в игре «Виртуальный футбол» Каждый алгоритм, управляющий роботом в игре «Виртуальный футбол» является скомпилированной java-программой. Class-файлы данной программы должны быть помещены в отдельный jar-архив, который может быть загружен в игру с помощью диалога формирования команд (рисунок 2). 1.4.2 Robot.java Для каждого управляющего алгоритма требуется наличие главного javaкласса, который должен наследоваться от абстрактного класса Robot, предоставляющего основное API (API – сокращение от «application programming interface» – программный интерфейс приложения) управления роботом во время игры. Полное имя данного класса должно быть задано в манифесте (манифест – специальный файл с именем MANIFEST.MF, находящийся в jar-архиве, в каталоге META-INF) jar-архива под заголовком с именем Robot-class. Класс Robot предоставляет следующие функции управления роботомфутболистом: void setSpeed(double); void setTurnAngleLeft(double); void setTurnAngleRight(double); void setSpeedVector(Vector). Первый метод позволяет задать желаемую скорость движения робота. Реальная скорость движения может отличаться после вызова этого метода из-за наличия ускорения и ограничения скорости движения робота. Второй и третий методы позволяют изменить угол направления движения, совершая, соответственно, поворот налево или направо. Данные методы учитывают ограничения, накладываемые на изменение угла, а именно максимальную угловую скорость. Если аргумент метода превосходит эту величину, то происходит изменение угла на максимальную угловую скорость. Последний метод объединяет в себе функциональность первых двух и обеспечивающую простоту задания скорости игрока. Данный метод все так же учитывает ограничения, накладываемые на скорость и угол поворота объекта и описанные выше. Данный набор методов позволяет полностью контролировать поведение робота в рамках игры «Виртуальный футбол». Каждый временной тик игры (наименьший временной отрезок игры) для всех роботов вызывается метод void onStatus(StatusEvent). Данный метод переопределяется создателем робота и задает алгоритм управления роботом в процессе игры. Его единственный аргумент содержит в себе всю необходимую информацию об окружающей среде на момент вызова данного метода. Эта информация включает в себя положения и скорости всех игроков и мяча, их линейные размеры, а так же конфигурацию игрового поля. Игровое поле характеризуется линейными центрального круга. размерами, шириной ворот и радиусом ГЛАВА 2.