var1
advertisement

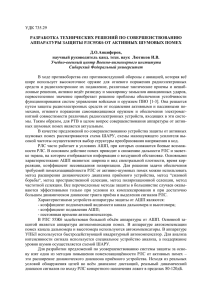
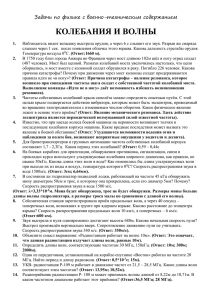
Министерство Образования и Науки Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Московский Государственный Технический Университете имени Н.Э.Баумана Кафедра СМ11 «Подводные аппараты и роботы» Расчетно-пояснительная записка по курсу 9 семестра «Военная-техническая подготовка» «Выбор зондирующего сигнала и способа обзора пространства для РЛС» ( Вариант №1) Студенты Москва 2007 Содержание 1. 11 1.2 1.3 1.4 2. 2.1 2.2 2.3 3. Исходные данные…………………………………………………………………..……... .3 Тактические характеристики РЛС обзора……………………………………………...... .3 Характеристики цели ................... ………………………………………………………….3 Характеристики мешающих излучений ............ ……………………………………... …...3 Характеристики мешающих отражений…………………………………………………...3 Выбор длины волны…………………………………………………………...……………4 Определение максимального значения длины волны…………………………………....4 Определение минимального значения длины волны ..........……………………………...4 Определим длину волны…………………………………………………………………....4 Определение вида зондирующего сигнала в решении задач обнаружения и измерения координат целей……………………………………………………………..….7 3.1 Общие соображения по выбору зондирующего сигнала РЛС………………………..….8 3.2 РЛС с селекторами движущихся целей……………………………………………………………………………………………....9 3.3 Фильтры с большим числом линий задержки……………………………………….......11 3.3.1 Компенсаторы……………………………………………………………………………11 3.3.2 Интеграторы………………………………………………………………………….......11 3.4 Изменение межимпульсных интервалов (ИМИ)……………………………………..…12 3.4.1 Формирование сигналов с ИМИ………………………………………………………..13 3.5 СДЦ с внешней когерентностью………………………………………………………...15 4. Выбор вида поляризации зондирующего сигнала……………………………………....17 4.1 Поляризационная селекция с помощью антенны круговой поляризации…………….20 5. Выбор способа обзора пространства по угловым координатам, дальности и радиальной скорости………………………………………………………………….………..22 5.1 Классификация методов обзора………………………………………………………….22 5.2 Последовательный однолучевой обзор…………………………………………………23 5.3 Электрическое сканирование луча антенны………………………………………….…25 5.3.1 Фазовое управление антенной решеткой………………………………………….…...25 5.3.2 Частотное управление антенной решеткой……………………………………….…...27 5.4 Многолучевые системы обзора………………………………………………………….28 5.5 Некоторые методы определения угла места (высоты цели)…………………….……..30 5.5.1 Метод сканирования по углу места……………………………………………….……30 5.5.2 МеАод наклонного луча………………………………………………………………...30 5.5.3 Метод парциальных диаграмм……………………………………………………….…31 6. Выводы…………………………………………………………………………………....33 7. Литература…………………………………………………………………………….….34 1. Исходные данные Тактические характеристики РЛС обзора ròð 110 Lax 6 - требуемая максимальная дальность обнаружения - размер раскрыва антенны в вертикальной плоскости Lay 2 - максимальный размер раскрыва антенны в вертикальной плоскости. Присутствует весовая пространственная обработка. x 3 - разрешающая способность по азимуту. yy 55- разрешающая способность по углу места. r 90 - разрешающая способность по дальности. df 5 fïð - ошибки в настройке АЧХ основного и дополнительного каналов радиоприемного устройства РЛС. ha 4 - высота подъема антенны РЛС. Höìèí 200 Tîáç 12 - минимальная высота обнаруживаемой цели. - период обзора îáçx 360 îáçy 20 - сектор обзора по азимуту. - сектор обзора по углу места. Kø 14 - коэффициент шума приемника. ìàx 30 - максимальное угловое направление прихода АШП от нормали. Dòð 0.5 mòð 3 - наиболее вероятное число ложных тревог за обзор. rîîí 150 - интервал однозначного измерения дальности до цели. Pcpmax 20 - максимальная средняя мощность излучения передатчика. Pomax 1000 áîê 35 Kanom 10 Ln 4 - требуемая вероятность правильного обнаружения. - максимальная пиковая мощность излучения передатчика. - уровень боковых лепестков ДНА приемной и передающей антенны. - коэффициент аппаратурных потерь. - число частот повторения. 1.2 Характеристики цели ö 50 ö 20 - ЭПР цели. - время корреляции флуктуации ОС. 1.3 Характеристики мешающих излучений Lanx 1 - размер антенны постановщика АШП в горизонтальной плоскости. Lany 1 - размер антенны постановщика АШП в вертикальной плоскости. rïï 300 - дальность до постановщика АШП. Napny 20 - спектральная плотность мощности на выходе радиопередающего устройства постановщика АШП. 1.4 Характеристики мешающих отражений â 0.5 n 20 - среднеквадратическое значение скорости ветра. - время корреляции флуктуации мешающих отражений. 7 10 Räîæî 30 XÌÎ 5 YÌÎ 5 ZÌÎ 5 - удельная плотность объемно распределенных МО. - протяженность области осадков на трассе РАС - цель. - размер области мешающих отражателей. - размер области мешающих отражателей. - размер области мешающих отражателей. 2. Выбор длины волны 2.1 Определение максимального значения длины волны Так как используется весовая пространственная обработка, то максимальную длину волны λmax определим по формуле: max=maxLamax/2 Где max - максимально допустимая по тактико-техническим требованиям ìàx maxx y ширина диаграммы направленности антенны, град; ìàx max x y ìàx 5 , Lamax - максимально допустимые по тактико-техническим требованиям размеры антенны, м. Lamax max Lax Lax Lamax 5 , Откуда: max ìàx Lamax 2 , max 12.5 2.2 Определение минимального значения длины волны 8 c 3 10 - скорость света. Условие однозначного определения дальности (при импульсном методе определения) Примем: Tn 2 ròð ñ . Tn 2 ròð c 6 , Tn 2 10 Частота повторения: 1 Fn Tn 5 Fn 5 10 , Число просматриваемых элементов по азимуту: m îáçy y m 3 , Считаем, что используется антенна с быстрым частотным сканированием, при этом обзор по углу места осуществляется одновременно с обзором по азимуту. Импульсная мощность передатчика распределяется между угломестными каналами. Тогда: Tîáç Tí m , Минимальное значение длины волны Tí 4 min 5 â 1 0.25 Fn 1 Tí n 5 min 1.2 10 , Среднее значение длинны волны: min max 2 , 6.25 2.3 Определим длину волны Длина волны зондирующего сигнала является важным фактором, определяющим основные тактико-технические характеристики РЛС. В начале отметим, что с увеличением длины волны увеличиваются размеры антенны, что приводит к увеличению стоимости и ухудшению мобильности, скрытности и живучести РЛС. Рассмотрим влияние длины волны на помехозащищенность РЛС в условиях мешающих отражений: - среднее значение эффективной отражающей поверхности гидрометеоров: 1 2 0.026 , существенно уменьшается с увеличением длины волны, где l - линейный размер гидрометеора; - однако с увеличением длины волны, при работе в облаках дипольных отражателей, 2 ЭПР МО может возрастать, т.к. ЭПР полуволнового диполя равен 0,17 и возрастает пропорционально длине волны; - с увеличением длины волны уменьшается составляющая ширины спектра - флуктуации мешающих отражений за счёт разброса скоростей отражателей при порывах ветра и турбулентности атмосферы: fB â f 0.048 B , - с увеличением длины волны уменьшается доплеровская частота МО от движущегося облака мешающих отражателей: fÄÏ 2 â , fÄÏ 0.096 f , что позволяет сузить зону режекции при отсутствии компенсации ÄÏ . Это крайне важно для РЛС с низкой частотой повторения ЗС Fn = (400..1000) Гц. Однако с увеличением длины волны ухудшаются условия наблюдения малоскоростных целей, т.к. сигнала от этих целей попадает в зону режекции. Длина волны влияет на дальность обнаружения следующим образом: - от длины волны зависит среднее значение ЭПР цели; - как правило, с увеличением длины волны уменьшается коэффициент шума К ш радиоприёмного устройства; - с увеличением длины волны уменьшаются потери за счёт затухания радиоволн в атмосфере; - с изменением длины волны изменяется степень влияния подстилающей поверхности на формирование зоны обнаружения. В качестве критерия выберем минимум величины r' 2 2 r''îáí ìâö ròð , îáí Kîñ r где r'îáí - дальность обнаружения маловысотной цели без учета множителя земли, м: r'îáí 2 Rç Rç 6400 1000 Höìèí ha 4 r'îáí 3.391 10 , r''îáí - дальность обнаружения цели на средних и больших высотах без учета ослабления сигнала в атмосфере, м; 5 3 Kr 4.96 10 rìâö , 5.10 Kr ròð r11îáí ròð 10 r''îáí 300.298 , - дальность обнаружения маловысотной цели, м: r 4 2 p r 2 r 3 r 2 4 p ïâ ïâ ïâ ïâ 3 rìâö rìâö 3.467 10 2 p , K Посчитаем коэффициент îñ для i .: 1 2 3 I 4 5 max min 6 i( I) min I 7 , , 4 ha Höìèí r'îáí i( I) , p ( I) 12.5 6.25 4.167 i( I) 3.125 2.5 2.083 1.786 6.136 106 1.227 107 1.841 107 p ( I) 2.454 107 3.068 107 7 3.682 10 7 4.295 10 13.8 9.836 8.092 Kîc 7.062 6.363 0.0001 Kr r 2 p ïâ 10 Kîñ 5.851 r 2 2 p r r 2 4 p ïâ ïâ ïâ 5.457 , В качестве оптимального выбирается такое значение длины волны опт при котором коэффициент Кос() имеет минимальное значение: Kîñmin 5.457 Поскольку Кос минимально при i=2.143, то найдем предпочтительную частоту при это длинне волны по формуле: fc c i( I) 8 fc 1.68 10 Определение вида зондирующего сигнала в решении задач обнаружения и измерения координат целей 3.1 Общие соображения по выбору зондирующего сигнала PЛC. Характер и качество информации, доставляемой РЛС, зависит от структуры и свойств зондирующего сигнала. В зависимости от назначения РЛС зондирующий сигнал должен позволять реализовать: 1) энергию излучения, достаточную для обнаружения целей и оценки их параметров; 2) требуемое разрешение целей и 3) достаточное подавление помех (нежелательных отраженных сигналов). Первое успешное применение сложного зондирующего сигнала в виде последовательности длинных импульсов с внутриимпульсной модуляцией по несущей частоте было осуществлено в начале 50-х годов, когда испытывались первые РЛС со сжатием импульсов. В этих РЛС использовался зондирующий импульс с линейно нарастающей (или убывающей) несущей частотой, а эхо-сигнал пропускался через согласованный фильтр приемника, в результате чего осуществлялось сжатие энергии эхосигнала на коротком интервале времени. Таким путем одновременно достигались и большая энергия излучения, свойственная длинному (несжатому) зондирующему импульсу, и высокое разрешение целей, свойственное короткому сжатому эхо-импульсу. С начала 50-х годов термин сжатие импульсов стал означать любой метод импульсной радиолокации, в котором для указанных выше целей путем того или иного вида модуляции (манипуляции) внутриимпульсньгх колебаний достигается высокое значение базы зондирующего импульса, а затем путем надлежащей фильтрации производится сжатие во времени энергии эхо-сигналов. В приемниках РЛС обычно используется согласованный фильтр. Такой фильтр максимизирует отношение сигнал/шум при аддитивном белом гауссовом шуме и обеспечивает наибольшую вероятность обнаружения целей. В начале 50-х годов Вудворд создал единицу теорию разрешающей способности РЛС, которая объединила понятия сжатия импульса и согласованной фильтрации в одной полезной функции, получившей наименование функции неопределенности. Эта функция описывает свойственные радиолокационным сигналам способности и свойства: разрешающую способность, меру неопределенности, теоретическую точность измерения и степень подавления помех. Функция неопределенности стала основным математическим инструментом при анализе, синтезе и исследовании радиолокационных сигналов. Радиолокационного сигнала, который бы идеально подходил для любых применений, не существует даже теоретически. По этой причине в некоторых РЛС предусматривается возможность работы с несколькими различными сигналами, каждый для соответствующей задачи. Выбор сигнала для данной ситуации требует знания информации, которую РЛС должна получить, и информации, которую она должна исключить. К информации, которую необходимо получить, может относиться любая из следующих величин (или все сразу): дальность, радиальная скорость, радиальное ускорение, эффективная площадь рассеяния (ЭПР), спектр отраженного целью сигнала, его амплитуда, фаза и поляризационные свойства. При выборе сигнала следует учитывать также требуемые скорость передачи данных и точность измерений. Для определения информации, подлежащей исключению, надо знать условия и обстановку, в которой РЛС придется работать и которая влияет на требования, предъявляемые к разрешающей способности и степени подавления мешаюших отражений от местных предметов. Перечисленные ниже общие требования к выбору сигнала часто противоречат друг другу (как теоретически, так и практически). Поэтому при выборе сигнала РЛС нередко приходится прибегать к компромиссному решению. Энергия сигнала. От полной энергии зондирующего сигнала, излучаемой РЛС, зависит ее способность обнаруживать цели и производить точные юмерения при наличии шума. Первый шаг при выборе зондирующего сигнала заключается в определении из уравнения дальности радиолокации энергии, необходимой для обнаружения и измерения параметров эхо-сигнала на максимальной дальности действия. Затем следует выбрать вил и способ формирования сигнала, обладающего такой энергией. При этом ограничивающим фактором часто бывает пиковая мощность излучения РЛС Разрешающая способность. Способность РЛС различать две близко отстоящие друг от друга цели называется разрешающей способностью. При выборе и формировании сигнала приходится учитывать разрешение по дальности, по допплеровской скорости и иногда по радиальному ускорению. Подавление отражений от местных преометов. Все радиолокационные отражатели, за исключением «полезной» цели, называются источниками мешающих отражений или помехами от местных предметов. Примерами таких источников являются земля, море, дождь и дезориентирующие искусственные дипольные отражатели. При обработке сигнала, отраженного от конкретной цели, обычно приходится добиваться, чтобы отражения от всех мешающих отражателей были достаточно минимизированы или разрешены. Это обычно достигается надлежащим формированием зондирующего сигнала РЛС. Неопределенности различного вида. Эхо-сигналы, поступающие с различных дальностей, которые для РЛС неразличимы, считаются поступающими с неопределенных дальностей. Существуют также неопределенные скорости и ускорения цели. Мертвые зоны, РЛС, которые не могут принимать сигналы во время излучения, имеют «мертвые» зоны. Эхо-сигналы от целей, находящихся в мертвых зонах, достигают РЛС во время, когда станция излучает, а не принимает, и, следовательно, утрачиваются. Ближайшее расстояние от РЛС, начиная с которого она принимает эхо-сигналы, называется минимальной дальностью. РЛС, работающие в режимах длительного (непрерывного или почти непрерывного) излучения, обычно имеют большую минимальную дальность. Точность. Среднеквадратичное отклонение оценки некоторых параметров (например: дальности, доплеровского смещения частоты, ЭПР целя и др.), обусловленное действием шумов, характеризует точность РЛС. Понимаемую таким образом точность нередко ошибочно смешивают с точностью, которая характеризуется полной ошибкой системы, включающей также систематические ошибки (ошибки смещения). Первое же понятие ошибки этого вида не охватывает. Точность, определяемая дисперсией ошибки, зависит от отношения сигнал/шум и структуры сигнала. Практическая реализуемость генерирования и излучения выбранного зондирующего сигнала, а также устройства обработки эхо-сигнала, само собой разумеется, должна обеспечиваться. Стоимость и сложность оборудования и аппатуры следует рассматривать с учетом преимуществ, получаемых благодаря использованию сложных сигналов. 3.2 РЛС с селекторами движущихся целей Основной целью использования в РЛС селектора движущихся целей (СДЦ) является режекция сигналов пассивных помех от неподвижных целей, которые не представляют интереса (например, зданий, холмов или деревьев), и выделение сигналов, отраженных от движущихся целей (например, самолетов), чтобы в дальнейшем эти сигналы использовать для обнаружения целей или для отображения радиолокационной обстановки на экране индикатора. Рассмотрим некоторые типы селекторов движущих целей. В наиболее широко распространенных устройствах - когерентных СДЦ - для выделения движущихся целей на фоне пассивных помех используется доплеровский сдвиг, свойственный сигналам, отраженным от движущихся целей. В импульсных РЛС этот доплеровский сдвиг проявляется в виде изменения фазы последовательно принимаемых импульсных сигналов. РЛС излучает ВЧ импульс, который отражается от здания и самолета, затем - второй импульс. Отражение от здания происходит точно через такое же время, как. и для, первого импульса, однако отражение от самолета происходит через меньший промежуток времени, так как за время, прошедшее между передачей первого и второго импульсов. самолет несколько приблизился к РЛС. Точное значение времени приема отраженного сигнала приемником РЛС не имеет принципиального значения. Основное значение имеег разница времен прихода импульсов. Это временное различие, которое для такой цели, как самолет, составляет несколько наносекунд, обнаруживается при сравнении фаз принимаемого сигнала и опорного сигнала гетеродина РЛС. Если цель неподвижна, то относительная фаза последовательно принимаемых импульсов остается неизменной. Если цель перемещается, то фазы принимаемых импульсов меняются. На рис. 3-1 показана упрощенная структурная схема одного типа когерентного СДЦ. Сигнал ВЧ генератора поступает на импульсный усилитель, на выходе которого формируются зондирующие импульсы. Он используется также и как опорный сигнал при определении фазы отраженных сигналов. В течение интервала между передаваемыми импульсами фазовая информация хранится в линии задержки; при поступлении очередного импульса хранимое значение фазы предыдущего импульса вычитается из значения фазы принятого сигнала. На выходе устройства сравнения фаз сигнал появляется только в том случае, если принятый сигнал отразился от движущейся цели. Рисунок 3-1 Упрошенная структурная схема когерентного СДЦ Частотная характеристика (отклик) СДЦ при обнаружении сигналов от движущихся целей меняется в зависимости от радиальной скорости цели. Для описанной выше схемы СДЦ отклик, нормированный к единичному коэффициенту усиления мощности шумов, показан на рис. 3-2. Отметим, что отклик имеет нуль при нулевой скорости (неподвижные цели) и при скоростях цели =46, ±92, ±138, ... м/с. Эти скорости (называемые обычно слепыми скоростями) соответствуют перемещению цели за время между излучениями последовательных импульсов на 0, 1/2, 1, 3/2, ... от Л. Такое перемещение приводит к тому, что принимаемый сигнал имеет фазовый сдвиг между последовательными импульсами, равный 360° или кратный этому значению; при таком фазовом сдвиге напряжение на выходе фазового детектора не изменяется. VB - слепая скорость: - длина волны передаваемых сигналов; f r - частота повторения импульсов (ЧПИ). Рассматривая кривую на рис 3-2. отметим, что отклик на цели, скорость которых лежит посередине между слепыми скоростями, превышает отклик нормального приемника. По оси абсцисс, как показано на рис. 3-2. можно отложить и доплеровскую частоту цели, которая определяется из соотношения f d 2VR / - доплеровская частота; VR - радиальная скорость цели; Из графика на рис. 3-2 можно заметить, что доплеровские частоты, соответствующие слепым скоростям, являются целыми кратными ЧПИ -92 -46 0 46 92 138 Радиальная скорость цели, м/с Рисунок 3-2 Отклик СДЦ для РЛС, работающей на частоте 1300 МГц с ЧПИ 400 имп/с 3.3 Фильтры с большим числом линий задержки 3.3.1 Компенсаторы Рассмотренная структурная схема СДЦ описывает компенсатор с одной линией задержки. Для того, чтобы изменить частотную характеристику СДЦ и приспособить ее для обработки сигналов от целей с различными скоростями, можно каскадно соединять большое число линий задержки и вводить обратную связь, соединяющую выход и вход линии задержки. Компенсаторы с большим количеством линий задержки имеют более широкую полосу режекции пассивных помех, чем компенсаторы с единственной линией задержки. В эту более широкую полосу режекции попадает большая часть спектра пассивных помех и тем самым достигается увеличение коэффициента улучшения СДЦ, достижимое при данном спектральном распределении пассивных помех. 3.3.2 Интеграторы Синхронные интеграторы можно синтезировать, используя линии задержки. На рис. 3-3 показаны две структурные схемы синхронных интеграторов на линиях задержки, которые имеют один и тот же частотный отклик. Двухконтурная схема является более предпочтительной, так как на практике легче обеспечить ее устойчивость. В видеоинтеграторах можно использовать сигналы с амплитудной, частотной или фазовой модуляцией. Амплитудная модуляция в общем случае не позволяет получить удовлетворительных результатов при коэффициентах обратной связи, превышающих 0.9. В то же время при использовании частотной и фазовой модуляции можно построить стабильные интеграторы с коэффициентами обратной связи, весьма близкими к единице. Рисунок 3-3 Структурные схемы двух видов интеграторов на линиях задержки. Синхронные видеоинтеграторы обычно применяются для интегрирования обычных видеосигналов в радиолокационных системах. Существуют три основных соображения, оправдывающих введение таких интеграторов: 1. В большинстве применений наиболее важным соображением является то, что при включении интегратора перед ограничителем видеосигналов будет происходить подавление случайных импульсных помех. 2. Второй целью использования видеоинтегратора является облегчение задачи усиления контрастности отметок от слабых целей на экране ИКО. Интегратор не позволяет получить теоретическое улучшение по сравнению с оптимальной комбинацией ИКО - оператор, но он позволяет усилить контрастность с помощью следующей за интегратором пороговой схемы, что уменьшает утомление оператора. Если комбинация ИКО - оператор не является оптимальной, то использование видеоинтегратора с пороговой схемой уменьшает "потери из-за усталости". 3. Третья область применения видеоинтеграторов - использование их в системах с устройствами автоматического обнаружения, в которых для обнаружения цели необходимо, чтобы пиковое значение отклика цели превышало некоторый фиксированный пороговый уровень. Схема, в которой перед видеоинтегратором включена схема ограничения, а за ним пороговая схема. Видеоограничитель ограничивает динамический диапазон сигналов, поступающих в интегратор, до 10 дБ. Этим достигаются две цели; во-первых, единичные импульсные помехи не создают на выходе интегратора заметного отклика и . во-вторых, сильные сигналы не выходят за границы динамического диапазона цепей интегратора, что привело бы к их перегрузке. Пороговая схема на выходе интегратора позволяет устранить проинтегрированное шумовое напряжение, что увеличивает контрастность сигналов, отображаемых на экране индикатора. 3.4 Изменение межимпульсыых интервалов (ИМИ) Интервал между излучаемыми РЛС импульсами можно менять, что позволяет смещать значения скорости цели, равные слепым скоростям СДЦ, Интервал меняется либо от импульса к импульсу, либо от одного периода сканирования до другого. Каждый из методов имеет свои преимущества. Преимуществом изменения интервала между импульсами от одного периода сканирования до другого является более простое построение системы и то. что помехи, вызванные многотрассовым распространениям, компенсируются в СДЦ с усилителем мощности. Стабилизация передатчика, необходимая для хорошего функционирования СДЦ с постоянным периодом повторения, связана с большими финансовыми затратами и увеличением массы системы. Однако стабилизация передатчика, необходимая для хорошего функционирования системы с изменением периода от импульса к импульсу требует преодоления еще больших трудностей. Однако в некоторых практических применениях изменение периода от импульса к импульсу оказывается необходимым. Если, например, в системе с изменением периода от сканирования к сканированию используется двойной компенсатор без обратной связи, имеющий полосу режекции 36%, то 36% полезных сигналов, которые принадлежат к рассматриваемой доплеровской частоте, при каждом сканировании будут теряться. Иногда это может оказаться недопустимым. При изменении периода от импульса к импульсу можно обеспечить хороший отклик на всех интересующих нас доплеровских частотах при каждом сканировании. Кроме того, на тех же самых доплеровских частотах можно получить лучший отклик, чем в системе, где период изменяется от сканирования к сканированию. Это происходит вследствие того, что изменение периода от импульса к импульсу модулирует доплеровский сигнал на частоте, близкой к частоте, на которой отклик компенсатора максимален. Изменение периода от импульса к импульсу может ухудшить потенциально достижимый коэффициент улучшения для некоторых систем, но для многих систем это ограничение не является существенным или его воздействие можно исключить за счет использования переменной во времени весовой обработки. Еще одним преимуществом изменения периода от импульса к импульсу является то, что для большей части применений нет необходимости использовать в компенсаторах обратную связь, что существенно упрощает разработку компенсатора. 3.4.1 Формирование сигналов с ИМИ Сигнал с двухпериодным ИМИ можно сформировать с помощью короткой (относительно среднего интервала между импульсами) линии задержки, которая включается или выключается из тракта прохождения сигнала для чередующихся импульсов. Сигнал синхронизации чередующихся импульсов передатчика проходит через ту же самую линию задержки, следовательно, период повторения импульсов передатчика изменяется по тому же закону ИМИ. Этот способ работы иллюстрируют рис. 3-5, а и б. Две инкрементные линии приведены на рисунке лишь для удобства объяснения. На практике для выполнения обеих функций используется одна и та же линия задержки. Рисунок 3-5 Структурная схема системы с ИМИ (а), двухпериодное ИМИ с отношением длин интервалов (Тс +- TS) :(Tc + TS). (б), трехпериодное ИМИ с отношением длин интервалов (Тс - TS) :Tc:(Tc + TS ) (в). Сигналы с трехпериодным ИМИ можно получить с помошью той же схемы, что и сигналы с двухпериодным ИМИ. Единственное изменение касается временного режима работы электронного переключателя. Временная диаграмма для сигнала с трехпериодным ИМИ показана на рис. 3-5, в. Она основана на предположении, что используется точно такая же схема, какая показана на рис. 3-5 я, но переключатель остается в верхнем положении для двух импульсов и затем перебрасывается вниз для одного импульса. Отношение длительности трех интервалов между импульсами равно (Тс - TS) :Tc:(Tc + TS). (Частота индикаторных синхроимпульсов остается неизменной). Следовательно, если длина инкрементной линии задержки равна 1/7 длины основной линии, то отношение межимпульсных интервалов в РЛС равно 6:7:8. Первая слепая скорость равна 7 VВ где VВ - первая слепая скорость системы без изменения интервалов между импульсами, работающей с той же самой ЧПИ. Обычно сигналы с изменением трех интервалов предпочтительнее сигналов с изменением двух интервалов. Если СДЦ должен работать без слепых скоростей по целям, имеющим скорости вплоть до некоторой заданной, то провалы в кривой отклика для схем с изменением трех интервалов на 3 дБ меньше. На рис. 3-6, а показана зависимость скорость - выходной сигнал для компенсатора с двумя линиями задержки без обратной связи в случае отношения межимпульсных интервалов 63:65 при поступлении 10 отраженных импульсов на ширине сканирующего луча антенны. Результаты для схемы с изменением трех интервалов показаны на рис. 3-6,6, отношение межимпульсных интервалов 31:32:33. Рисунок 3-6 а - отношение межимпульсных интервалов 63:65; б - отношение межимульсных интернатов 31:32:33. 3.5 СДЦ с внешней когерентностью Иногда оказывается желательным создать СДЦ, который обнаруживает цели за счет использования скорости относительного перемещения цели и распределенных помех, а не абсолютного значения радиальной скорости цели. Часто жел ательно, например, обнаружить цель, движущуюся на фоне метеорологических образований или облака металлизированных отражателей. Метеорологические образования перемещаются относительно РЛС ветром, но цели движутся относительно этих метеобразований. Следовательно, будут происходить биения между вектором сигнала от цели и вектором сигнала от метеобразований с относительной доплеровской частотой. Система, обеспечивающая обнаружение такого сигнала, называется СДЦ с внешней когерентностью. Схема простейшего СДЦ с внешней когерентностью приведена на рис. 3-7. Рисунок 3-7 Структурная схема СДЦ с внешней когерентностью. Рпсувок 3-7 Структурная схема СДЦ с внешней когерентностью. шума. СДЦ. Перегиб линейно-логарифмической характеристики устанавливается уровень Hi то значение, которое равно ожидаемому коэффициенту улучшенной Теоретически использование логарифмического усилителя обеспечивает постоянный уровень остатков, так как флуктуации сигналов помех пропорциональны их амплитуде. Это cnpaведливо для распределенных помех, таких, как отражения от дождя или облака металлизированных отражателей, но в общем случае неприменимо к помехам от наземных объектов, которые претерпевают быстрые и значительные изменения амплитуды вследствие действия изолированных точечных объектов, таких, как водонапорная башня, или других искусственно созданных объектов. ТаK как функционирование систем такого типа зависит от биений сигнала от цели с сигналом помех, позволяющих обнаружить цель, то сигнал помех обязательно должен присутствовать на входе системы. Различие между интенсивностями сигналов помех и сигналов от цели должно быть меньше предела видимости под помехами (ВПП) данной РЛС. Цепи стробирования, которые выбирают нормальный видеосигнал в отсутствие помех, частично помогают преодолеть указанное выше ограничение, но существуют обычно большие зоны помех, в которых их сигнал слишком слаб, чтобы обеспечить обнаружение целей. В такой системе необходимо обеспечить большой динамический диапазон компенсатора. Чтобы уменьшить требования к динамическому диапазону компенсатора, иногда между линейно-логарифмическим усилителем и компенсатором включают цепь свертки. Переходная характеристика этой цепи показана на рис 3-8. Логика обработки сигналов после этой цепи такова, что единственным сушественным воздействием на входе компенсатора является различие амплитуд сигналов от импульса к импульсу. Это справедливо для одинарного компенсатора, но не справедливо для многоступенчатого компенсатора, который компенсирует сигналы с постоянной скоростью изменения амплитуды. На выходе многоступенчатого компенсатора появляется сильный сигнал каждый раз, когда амплитуда сигналов помех проходит через точку перегиба. Поэтому такая цепь не должна использоваться в компенсаторах с большим числом линий задержки. Рисунок 3-8 Характеристика свертки Вывод Выбраны следующие характеристики 3-х координатной РЛС: -длина волны, -частота повторения импульсов, -круговая поляризация зондирующего сигнала, так как при этом минимизируется уровень помех, -способ обзора пространства. 1)Моноимпульсный по угловым координатам (одновременный обзор по азимуту и углу места). Для данной РЛС скорость обзора оправдывает затраты на аппаратуру. 2) Импульсный метод измерения дальности 3) Разрешение по радиальной скорости обеспечиваем трехпериодной схемой изменения межимпульсных интервалов.