Метод конечных элементов в более общем виде
advertisement

Государственное унитарное предприятие
«Институт проблем транспорта энергоресурсов»
(ГУП «ИПТЭР»)
УДК 622.692.4
На правах рукописи
ШАДРИН ВАЛЕРИЙ СЕРГЕЕВИЧ
РАЗВИТИЕ МЕТОДОВ ОЦЕНКИ НАПРЯЖЁННОГО
СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ
Специальность 25.00.19 − Строительство и эксплуатация
нефтегазопроводов, баз и хранилищ
ДИССЕРТАЦИЯ
на соискание ученой степени
кандидата технических наук
Научный руководитель –
Гумеров Кабир Мухаметович,
доктор технических наук, профессор
Уфа − 2014
2
ОГЛАВЛЕНИЕ
Введение ………………………………..………………………
4
1.
ПРОБЛЕМЫ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ
ПОДЗЕМНЫХ
ТРУБОПРОВОДОВ
В
ПРОЦЕССЕ
ЭКСПЛУАТАЦИИ …………………..………………………….. 12
1.1.
Контроль напряжений в системе мониторинга технического
состояния трубопроводов ………………………………………… 12
1.2.
Проблемы оценки напряженного состояния подземных
трубопроводов при эксплуатации ……………………………….. 14
Упрощающие допущения при разработке математического
аппарата методики ………………………………………………… 17
Выводы по главе 1 ………………………………….…………… 19
1.3.
2.
РАЗВИТИЕ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
ПРИМЕНИТЕЛЬНО К ЗАДАЧАМ ОЦЕНКИ НДС
ПОДЗЕМНЫХ ТРУБОПРОВОДОВ ….……………………….. 20
2.1.
Энергия деформаций в конечном элементе трубопровода (теоретические предпосылки) ……………………………………….
Влияние кривизны трубопровода на энергию деформаций …..
Способы описания конфигурации трубопровода и построения
конечно-элементной сетки ……………………………………….
Вычисление энергии элементов по координатам узлов
конечно-элементной сетки ………………………………………
2.2.
2.3.
2.4.
2.4.1.
2.4.2.
2.5.
2.6.
Вычисление энергии в подвижной системе координат ……….
Некоторые особенности неподвижной системы координат …..
Условия равновесия конечно-элементной модели трубопровода
Решение методом построения аппроксимирующих функций …
Выводы по главе 2 ………………………………………………
3.
РАЗВИТИЕ МЕТОДА КОНЕЧНЫХ РАЗНОСТЕЙ
ПРИМЕНИТЕЛЬНО К ПОДЗЕМНЫМ
ТРУБОПРОВОДАМ. ВЗАИМНОЕ ТЕСТИРОВАНИЕ
МКЭ И МКР ………………………………………………………
Уравнение продольно-поперечного изгиба трубопровода
на прямых участках………………………………………………..
Уравнение продольно-поперечного изгиба с учётом кривизны
Уравнение продольного сдвига трубопровода…………………...
Тестовые задачи и примеры……………………………………….
Выводы по главе 3 ……………………………………………….
3.1.
3.2.
3.3.
3.4.
20
34
43
47
48
56
57
61
64
66
67
69
77
82
94
3
4.
РЕШЕНИЕ ПРАКТИЧЕСКИХ ЗАДАЧ ДЛЯ ПОДЗЕМНЫХ
МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ …….…………….. 96
Выбор системы координат…………………………………………
Подготовка исходных данных…………………………………….
Алгоритм расчёта НДС……………………………………………
Структура расчётной программы…………………………………
Пример расчёта НДС………………………………………………
Важнейшие отличительные особенности метода и алгоритма….
Уточнение реакции грунта в процессе расчётов…………………
Погрешность подготовки исходных данных……………………..
Моделирование процессов и принятие оптимальных решений...
Оценка опасности дефектов, обнаруженных при ВТД…………
Выводы по главе 4 ……………………………………………….
Основные выводы ……………..…………………………...........
Библиографический список использованной литературы …..
Приложения ……………………………………………………….
Приложение 1. Расчёт касательных напряжений при поперечном
сдвиге трубы …………………………………………….
4.1.
4.2.
4.3.
4.4.
4.5.
4.6.
4.6.1.
4.6.2.
4.6.3.
4.6.4.
96
98
103
105
106
113
113
119
120
122
123
124
126
139
139
Приложение 2. Безразмерный параметр при поперечном сдвиге
трубы …………………………………………………….
142
Приложение 3. Минимизация функции методом аппроксимации …….
Приложение 4. Текст расчётной программы на языке «Fortran» ……
144
146
4
ВВЕДЕНИЕ
Актуальность работы
Система магистральных трубопроводов является одной из ключевых
составляющих нефтегазового комплекса страны. От их надёжной работы зависит безотказность поставок нефти и газа потребителям из районов добычи,
многие из которых расположены в отдалённых северных и восточных
районах со сложными природно-климатическими условиями.
Магистральные нефтегазопроводы относятся к объектам повышенной
опасности по ряду признаков (воспламеняющиеся и горючие вещества под
высоким давлением) [71, 72, 81, 82, 87, 88]. Всегда существует вероятность
разрушения, что сопровождается выбросом большого количества продукта,
экологическим ущербом, экономическими потерями, иногда жертвами.
Для сведения к минимуму вероятности таких событий предусматривается
периодический контроль технического состояния трубопроводов с применением неразрушающих методов, в том числе средств внутритрубной диагностики
(ВТД) [4, 25, 28, 48, 61, 64, 69, 74, 75, 89, 85, 95 и др.]. Методы и средства
контроля постоянно совершенствуются. Разрабатываются принципиально новые приборы, основанные на разных физических явлениях. Совершенствуются
также методы обработки получаемой информации, благодаря чему повышается
точность оценки безопасности обнаруженных дефектов и общего технического
состояния трубопроводов. Совершенствуются также методы ремонта и организация планирования работ [23, 26, 35, 36, 42, 44, 96 и др.].
Однако система в целом стареет, вместе с этим появляются новые
угрозы и необходимость детального изучения их.
Так, в последние несколько десятилетий на магистральных газопроводах существенно увеличилась доля разрушений по механизму стресскоррозии. Несмотря на большое количество обследованных аварий, до сих
пор нет единого мнения о природе и механизмах этого явления [2, 6, 9, 59,
77, 78, 83, 84, 107 121]. Экспериментальные исследования на модельных
образцах дают неубедительные результаты, поскольку моделирование невоз-
5
можно, не зная механизмов явления. Тем не менее, с некоторыми положениями все специалисты согласны.
Можно считать установленным, что стресс-коррозия не происходит на
участках, где трубопровод имеет качественное изоляционное покрытие. Также все согласны с тем, что стресс-коррозия проявляется только на таких трубопроводах и на таких участках, где напряженное состояние высокое, когда
растягивающая компонента напряжений близка к пределу текучести. Многие
начинают понимать, что есть некоторый предел, ниже которого стресскоррозия не развивается (так же, как ниже предела усталости не развивается
усталость). Поэтому в последние годы при обследовании трубопроводов стали придавать большое значение выявлению перенапряженных участков.
Разные исследователи обращают внимание на влияние других факторов: диаметра труб, марки стали, климата, свойств и состава грунта, температуры и др. Но эти факторы, судя по всему, носят второстепенное значение и
играют роль ускорителей или замедлителей глубинных процессов, контролирующих основной механизм явления.
Другие виды угроз связаны со сложными условиями эксплуатации трубопроводов, что характерно для северных районов с многолетнемерзлыми
грунтами. В таких грунтах вследствие теплового воздействия грунт вокруг
трубы растепляется и теряет защемляющую способность. В результате трубопровод всегда находится в движении, изгибается как змейка, уходит в
грунт или всплывает, во многих случаях образуются гофры. Поэтому
контроль напряженно-деформированного состояния (НДС) подземных трубопроводов в северных районах имеет особое значение.
В настоящее время внутритрубная диагностика является обязательной
для всех магистральных трубопроводов, что вполне оправдано ввиду её эффективности [10, 11]. Этот метод позволяет выявить большинство допущенных или вновь образованных дефектов, измерить размеры труб и дефектов,
уточнить конструктивные особенности. Поскольку устранение всех обнаруженных дефектов представляет собой нереальную задачу, а оставлять опасные
дефекты недопустимо ни при каких условиях, то возникает непростая задача –
6
оценить дефекты на предмет опасности. При этом опираются на проектное
давление, считая, что именно давление и создает основное поле напряжений.
Однако, как показывают теория и практика, есть компоненты напряжений, которые мало зависят (или вовсе не зависят) от давления, а определяются действием внешних сил: грунта, арматуры, опор, балластировки, воды, температуры. Не учитывая эти компоненты, можно сделать ошибочные заключения об
опасности (или безопасности) дефектов. Поэтому помимо кольцевых напряжений, зависящих только от давления, необходимо учитывать и продольные
напряжения, в поле которых находятся обнаруженные дефекты.
Есть ещё несколько явлений, которые в той или иной степени определяются напряжениями в трубопроводе, например старение металла труб [13,
37, 84, 86] и коррозионно-механический эффект [45, 50, 90]. В них напряжения играют роль ускорителя охрупчивания металла в первом случае и коррозии во втором. Поэтому при оценке остаточного ресурса подземных трубопроводов необходимо учитывать эти явления.
Задачу контроля напряженного состояния подземных трубопроводов
до сих пор пытались решать разными методами. Наиболее перспективные из
них основаны на измерении магнитных полей [1, 27, 32, 33, 49, 55, 56, 66, 68,
70]. Однако точность измерений пока низка и не соответствует поставленной
задаче.
Существует ряд расчетных методов и программ типа Ansys и Abacus,
которые широко применяются в случаях, когда геометрия трубопровода и
действующие силы точно известны [14, 15]. Но в тех случаях, когда действующие силы заранее не известны и сами зависят от деформации трубопровода, эти стандартные программы становятся малоэффективными. Поэтому существует необходимость в разработке таких расчётных методов и
программ, которые в наибольшей степени соответствуют задаче контроля
напряженного состояния трубопроводов в сложных климатических условиях
и грунтах, характерных для северных районов страны.
Как известно, все методы контроля постоянно совершенствуются.
Например, в настоящее время внутритрубные снаряды могут снабдить нави-
7
гационными блоками, с помощью которых удается получить информацию о
координатах отдельных точек трубопровода в момент прогонки, например,
всех сварных стыков. Такая информация может служить хорошей базой для
развития расчётных методов. При этом задачу целесообразно поставить следующим образом: трубопровод должен проходить через ряд контрольных точек с известными координатами, удовлетворяя при этом всем законам взаимодействия с окружающим грунтом, начальным и граничным условиям, и
соответствовать заданному давлению и температурным условиям. В решении
должно учитываться, что трубопровод состоит из секций, каждая из которых
имеет свои характеристики: длину, толщину стенки, исходную кривизну, механические свойства. Также должно быть учтено, что в отдельных точках
находятся арматура, опоры, тройниковые узлы и другие конструктивные
элементы, создающие дополнительные ограничения и нагрузки.
Такая расчётная методика позволила бы значительно повысить точность оценки состояния трубопровода с учётом реальной дефектности и реального напряженного состояния.
Анализ обозначенных выше проблем и возможных путей их решения
позволил сформулировать цель и задачи в рамках настоящей диссертационной
работы.
Цель работы − повышение эффективности контроля технического состояния подземных магистральных трубопроводов при длительной эксплуатации в сложных природных условиях.
Для достижения поставленной цели были сформулированы следующие
основные задачи:
1. Анализ методов оценки напряженного состояния подземных трубопроводов в процессе эксплуатации с учётом геометрических особенностей и
грунтовых изменений;
2. Разработка математической модели подземного трубопровода с учётом его характерных особенностей и возможных изменений в процессе
эксплуатации;
8
3. Построение численных моделей подземного трубопровода, максимально адаптированных к технологии внутритрубной диагностики, учитывающих многообразие факторов и реальные условия эксплуатации;
4. Разработка алгоритма и расчётной программы оценки напряженнодеформированного состояния трубопровода на базе результатов внутритрубной диагностики.
Методы решения поставленных задач
При разработке основных положений диссертационной работы использованы положения теоретической механики, теории упругости, теории
устойчивости, математической физики, математического анализа, а также
численные методы, в том числе метод конечных разностей (МКР) и метод
конечных элементов (МКЭ).
Основой для решения данных задач явились работы отечественных и
зарубежных ученых и специалистов: Р.М. Аскарова, Х.А. Азметова, С.Г. Бажайкина, А.В. Бакиева, О.А. Бакши, А.Г. Гумерова, К.М. Гумерова, Р.С. Зайнуллина, Н.Л. Зайцева, А.Г. Игнатьева, П.В. Климова, Ю.В. Ларионова,
Е.М. Морозова, Ф.М. Мустафина, Ю.И. Пашкова, А.Г. Сираева, О.И. Стеклова, Ю.В. Стицея, К.М. Ямалеева и других.
Научная новизна результатов работы
1. Разработана математическая модель подземного трубопровода в общем виде с учётом кривизны и распределенных внешних и внутренних сил.
Получена система дифференциальных уравнений равновесия, включающая
два уравнения продольно-поперечного изгиба во взаимно-перпендикулярных
плоскостях и одно уравнение продольного сдвига.
2. Получены ключевые для метода конечных элементов формулы, выражающие зависимость энергии деформаций и функции Лагранжа от смещений узлов с учётом кривизны элементов и произвольных действующих сил.
Показано, что в области равновесного состояния функцию Лагранжа можно
заменить полиномами второй степени. Это позволило упростить решение
9
системы уравнений за счёт замены фактической функции Лагранжа полиномами.
3. Исследовано влияние кривизны трубопровода на напряженное
состояние и энергию деформации. Показано, что при оценке энергии деформаций с погрешностью не более 5 % можно пренебречь кривизной по оси 0
в области / D 0,02 и 0 / D 1,5 (D и соответственно диаметр и толщина стенки трубы). При оценке максимальных напряжений и прочности такая
же погрешность соответствует области 0 / D 6 .
4. Разработан программный комплекс, позволяющий по данным внутритрубной диагностики с использованием навигационных датчиков рассчитывать напряженно-деформированное состояние подземных магистральных
трубопроводов с учётом произошедших за время эксплуатации грунтовых
изменений.
На защиту выносятся:
математическая модель подземного трубопровода, включающая:
дифференциальные уравнения равновесия трубопровода с учётом кривизны и распределенных сил;
формулы вычисления энергии деформации и функции Лагранжа с учётом кривизны участков и элементов трубопровода;
расчётные формулы для оценки реакции грунта при относительных
сдвигах трубопровода в продольном и поперечном направлениях;
закономерности влияния кривизны и других параметров на напряженное состояние подземного трубопровода;
алгоритм и программный комплекс, позволяющие контролировать
напряженно-деформированное состояние подземного трубопровода по результатам пропуска внутритрубных снарядов, снабженных навигационными
датчиками.
10
Практическая ценность и реализация результатов работы
1. Разработанная методика даёт возможность использовать результаты
внутритрубной диагностики и других видов обследований в качестве исходных данных для оценки напряженно-деформированного состояния подземного трубопровода и при этом учитывать следующие факторы:
исходную кривизну участков и элементов;
реакцию грунта в виде зависимостей любых форм (необязательно ли-
нейных);
действие воды в вертикальном и горизонтальном направлениях;
погрешности измерений при подготовке исходных данных.
2. Разработанный программный комплекс позволяет моделировать варианты ремонтных работ и выбрать оптимальные технические решения.
3. Разработанная методика и программный комплекс позволяют существенно повысить точность оценки обнаруженных дефектов за счёт знания
фактических напряжений на месте расположения дефектов.
Результаты исследований использованы при анализе напряженного
состояния нефтепроводов месторождения «Ванкор» и магистрального газопровода Челябинск Петровск.
Апробация результатов работы
Основные положения и результаты работы докладывались на:
XIII Всероссийской научно-практической конференции «Энергоэффективность. Проблемы и решения» (Уфа, 2013 г.);
IX
Международной
учебно-научно-практической
конференции
«Трубопроводный транспорт − 2013» (Уфа, 2013 г.);
X Всероссийской научно-технической конференции «Актуальные
проблемы развития нефтегазового комплекса России» (Москва, 2014 г.);
XVII Международной научно-технической конференции «Проблемы
строительного комплекса России» (Уфа, 2014 г.);
11
Международной научно-практической конференции «Проблемы и
методы обеспечения надёжности и безопасности систем транспорта нефти,
нефтепродуктов и газа» (Уфа, 2014 г.).
Автор выражает искреннюю благодарность коллективу ГУП «ИПТЭР»
за методическую помощь и критические замечания при разработке математического аппарата; коллективу ИТЦ «Оргэнергодиагностика» за содействие
в процессе апробации расчетной модели на конкретных трубопроводах.
12
1. ПРОБЛЕМЫ ОЦЕНКИ НАПРЯЖЕННОГО СОСТОЯНИЯ
ПОДЗЕМНЫХ ТРУБОПРОВОДОВ В ПРОЦЕССЕ
ЭКСПЛУАТАЦИИ
1.1. Контроль напряжений в системе мониторинга технического
состояния трубопроводов
При оценке безопасности нефтегазопроводов (подземных, наземных и
надземных), которые эксплуатируются в сложных инженерно-геологических
условиях (просадка, пучение, оттаивание, сдвиг, размыв грунта и т.д.), важно
знать динамику изменения напряженно-деформированного состояния, которое наряду с механическими свойствами металла труб и состоянием дефектности является одним из определяющих факторов при оценке их надёжности
и безопасности. Как правило, на таких участках вследствие непрекращающихся грунтовых явлений происходят смещения трубопровода относительно
исходного состояния и возникают дополнительные нагрузки в виде поперечных и продольных сил и изгибающих моментов. Это может вызвать перенапряжение отдельных участков трубопровода, что само по себе является фактором опасности [7, 8, 19, 22 и др.]. Если на таких участках трубопровода
имеются концентраторы напряжений (неудачно выполненные конструктивные элементы, сварные швы с отклонениями от норм, дефекты различного
происхождения), то перенапряжение в этих локальных зонах представляет
реальную угрозу разрушения трубопровода. Чтобы противостоять этой угрозе, необходимо создать систему мониторинга, включающую три основные
составляющие:
1) контроль планово-высотного положения трубопровода с учётом
природно-климатических условий и возможных грунтовых процессов, таких
как пучение, мерзлота, оттаивание, обводнение и другие;
2) оценку напряженно-деформированного состояния трубопровода с
учётом происходящих изменений;
13
3) оценку предельного (опасного) состояния трубопровода с учётом
направления происходящих изменений, достигнутого уровня дефектности,
фактического режима эксплуатации (рабочего давления, температуры, цикличности, защиты от коррозии).
В этом ряду самой важной для практики является последняя задача. Но
она может быть решена только после решения второй обозначенной задачи –
правильной оценки напряженного состояния трубопровода, которая, в свою
очередь, не может быть выполнена без решения первой задачи – получения
объективной информации о происходящих изменениях.
Важна и обратная цепочка задач.
Очевидно, что не всякие методы и приборы позволяют получать в достаточном объёме исходные данные, необходимые для выполнения расчётов
напряжений. Также очевидно, что не всякие компоненты напряжений позволяют правильно оценивать опасность трубопровода с учётом имеющихся
факторов сложности [17, 73, 76, 79]. Критерии разрушения, используемые в
последней задаче, диктуют, какие компоненты напряжений и в каких точках
следует определять, чтобы правильно оценить опасность ситуации. Это, в
свою очередь, диктует тот минимальный или оптимальный набор приборов и
методик измерений, который необходимо предусмотреть в первой задаче.
Таким образом, сформулированные выше задачи являются связанными
друг с другом общей целью – обеспечением надёжности и безопасности трубопровода в процессе длительной эксплуатации в сложных инженерногеологических и природно-климатических условиях.
В то же время, каждая из сформулированных трёх составных частей
мониторинга является самостоятельной задачей, требующей отдельного рассмотрения, применения специальных методик, приборного и программного
обеспечения.
В настоящей работе уделяется основное внимание второй из поставленных задач – оценке напряжений в трубопроводе с учётом данных, полу-
14
ченных в результате периодических обследований трубопроводов. При этом
будем ориентироваться на два основных вида обследований:
1) обследование внутритрубными снарядами, при котором удаётся получать координаты стыков труб (секций), конструктивных элементов (опор,
хомутов, арматуры, тройниковых ответвлений), дефектов и других аномалий.
Координаты включают следующие величины:
- дистанцию (расстояние, пройденное одометром от камеры запуска);
- высоту (высотную отметку);
- азимуты (широту и долготу);
- координаты Х, Y в одной из принятых систем (местной, международной, …).
Кроме того, при внутритрубной диагностике определяется толщина
стенки каждой секции;
2) обследование наземными приборами контроля (трассоискателем, нивелиром, теодолитом, GPS-навигатором, приборами типа «Орион», УКИ и
др.), позволяющими уточнить трассу трубопровода в выбранной системе координат, определить глубину залегания и измерить высотные отметки земли
и трубопровода. Если трубопровод на опорах, то определяются координаты
опорных точек с учетом возможных смещений от проектного положения.
1.2.
Проблемы
оценки
напряженного
состояния
подземных
трубопроводов при эксплуатации
При длительной эксплуатации подземных трубопроводов в ряде случаев необходимо учитывать его реальное положение на местности, которое
может отличаться от проектного. Отличия связаны в основном с изменениями, происходящими в грунте при длительной эксплуатации. Изменения особенно заметны на переходах через реки (вода размывает дно и берега), на
участках, подверженных оползням, в карстовых зонах.
15
В северных районах изменения связаны с тепловым взаимодействием
трубопровода и грунта, в результате чего грунт растепляется, превращается в
жижу, теряет прочность и защемляющую способность. При изменениях режима перекачки в трубопроводе изменяются осевые деформации, что ведёт к
неконтролируемым поперечным смещениям. В результате трубопровод может всплыть или утонуть, отклониться в сторону, изогнуться до образования
гофра. Если трубопровод проходит через труднодоступные места, то эти изменения долгое время остаются незамеченными. Это характерно, например,
для затапливаемых районов в весенний период.
Наиболее эффективным, а иногда и единственно доступным методом
контроля на таких участках является внутритрубная диагностика с использованием различных датчиков, в том числе навигационных. Результаты таких
прогонок содержат в себе ценные сведения не только о состоянии дефектности, но и о напряженном состоянии. Однако выделить из этих сведений значения напряжений представляет собой сложную задачу. Сложность состоит в
следующих положениях.
Во-первых, напряжение представляет собой тензор второго порядка,
состоящий из девяти компонент [16, 18, 62, 80, 92]. То есть для определения
полного напряженного состояния трубопровода, строго говоря, необходимо
определить по девять скалярных величин в каждой точке стенки трубопровода. Положение точек трубопровода определяется тремя координатами: по оси
трубы, по радиусу и по окружности поперечного сечения. Таким образом,
получается бесконечное количество неизвестных даже на коротком
участке трубопровода. Это является одним из затрудняющих факторов при
использовании стандартных расчётных программ и при обработке получаемой информации с точки зрения прочности.
Другая, более существенная, проблема состоит в том, что для решения
задачи о напряжениях с помощью стандартных программ необходимо задаться всеми силами, действующими на трубопровод. Такие силы заранее не
известны, поскольку они сами сложным образом зависят от искомых величин
16
– смещений трубы относительно грунта. Поэтому здесь целесообразно применять метод последовательных приближений, когда вместе с напряженнодеформированным состоянием трубопровода одновременно уточняются реакции грунта на происходящие смещения. При этом становится возможным
учитывать нелинейность законов взаимодействия трубы с грунтом, вводить
необходимые проверки и ограничения, тем самым точнее учитывать важные
особенности.
Современные численные методы можно разделить на две группы: методы конечных элементов и методы конечных разностей.
Методы конечных элементов основаны на минимизации функции Лагранжа, представляющей собой энергию деформаций минус работа действующих сил [52, 57]. Варианты МКЭ отличаются друг от друга способами разбиения трубопровода на конечные элементы и способами вычисления энергии в элементах. Поэтому здесь стоят проблемы выбора оптимальной формы
конечных элементов, получения формул для вычисления энергии этих элементов и функций Лагранжа.
Методы конечных разностей основаны на решении дифференциальных
уравнений, описывающих равновесное состояние трубопровода под действием тех же сил [60, 67]. Варианты МКР отличаются формой представления
уравнений равновесия (в смещениях, напряжениях, потенциалах). Проблема
здесь в том, что известные дифференциальные уравнения равновесия в основном предполагают, что трубопровод изначально прямой, а кривизна приобретается при деформировании. Фактически же трубопроводы изначально
не являются прямыми. Они, во-первых, повторяют рельеф местности,
во-вторых, меняют направление в плане, огибая населенные пункты и
труднопроходимые места. Поэтому необходимо получить соответствующие
дифференциальные уравнения, учитывающие начальную кривизну участков
трубопровода.
Кроме того, и в МКЭ, и в МКР необходимо учитывать, что толщина
стенки трубопровода не является постоянной величиной вдоль всего трубо-
17
провода. Толщина стенки постоянна только в пределах одной секции (трубы,
отвода), но с переходом к другой секции может принимать другое значение.
Этот факт также затрудняет математический аппарат, но в численной реализации трудность преодолевается относительно легко.
Таким образом, перед разработкой математического аппарата и соответствующей методики требуется проанализировать пути решения отмеченных проблем. При этом целесообразно принять ряд допущений, позволяющих упростить задачу без ущерба для точности и достоверности решений
применительно к трубопроводам.
1.3. Упрощающие допущения при разработке математического
аппарата методики
При разработке методики примем следующие допущения:
1. Допустимое напряженно-деформированное состояние трубопроводов находится в пределах упругого состояния металла труб и сварных соединений [3, 12, 21, 65]. Поэтому максимальное напряжение в стенке трубопровода с учетом всех сил и воздействий (продукта, грунта, опор, температуры)
должно быть меньше предела текучести металла трубы. Это позволяет упростить задачу определения общего напряженно-деформированного состояния
трубопровода при сложном нагружении, используя принцип суперпозиции
упругих напряжений.
2. Согласно принципу суперпозиции, общее напряженное состояние
трубопровода можно разложить на следующие составляющие [16, 17, 20, 34]:
напряжения, зависящие от внутреннего рабочего давления;
напряжения, зависящие от температуры трубопровода;
напряжения, определяемые внешними силами (реакциями грунта,
воды, опор, осадков, ветра).
3. При расчётах напряжений от воздействия внешних сил трубопровод
рассматривается как протяжённая упругая балка переменного сечения, нахо-
18
дящаяся под действием распределённых и сосредоточенных поперечных и
продольных сил. На некоторых участках трубопровод обладает кривизной.
4. На подземных участках трубопровод находится в стеснённых условиях, в некоторой степени ограничивающих деформации в продольном направлении. Поэтому на таких участках напряженное состояние близко к плоскодеформированному ( z 0 ). На наземных и надземных участках, где предусмотрены компенсаторы, реализуется состояние, близкое к плосконапряженному ( z 0 ).
Первые две составляющие напряженного состояния (от внутреннего
давления и температуры) определяются аналитически. Третья составляющая
напряжений (от внешних сил) требует применения численных методов из-за
ряда особенностей.
Одна из таких особенностей состоит в том, что трудно аналитически
точно описать закономерности взаимодействия трубы с грунтом, которые к
тому же меняются в процессе эксплуатации из-за грунтовых процессов.
Другая сложность в том, что часто заранее не известны начальные и
граничные условия для решения. Они сами определяются только в результате
решения задачи.
Третья сложность исходит из того, что часто не известны остаточные
напряжения (напряжения, которые остаются в трубопроводе после снятия
рабочего давления).
Перечисленные выше сложности требуют применения универсальных
и гибких методов решений, к которым относятся современные численные
методы: метод конечных элементов и метод конечных разностей.
Таким образом, анализ обозначенных выше проблем и возможных путей решения позволил сформулировать цель и задачи в рамках настоящей
диссертационной работы.
19
Выводы по главе 1
1. Выявлены и проанализированы основные проблемы при контроле
напряженного состояния подземных трубопроводов при эксплуатации.
2. Перспективным направлением решения этих проблем является развитие численных методов оценки напряженного состояния на основе результатов внутритрубной диагностики.
3. Установлено, что ввиду неопределенности реакции грунта вдоль
трубопровода перспективно использование численных методов в сочетании с
методом последовательных приближений.
4. Для реализации этих методов требуется проанализировать существующий математический аппарат с учётом исходной кривизны трубопровода.
5. Выбраны обоснованные допущения, упрощающие математический
аппарат и его численную реализацию.
20
2. РАЗВИТИЕ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
ПРИМЕНИТЕЛЬНО К ЗАДАЧАМ ОЦЕНКИ НДС
ПОДЗЕМНЫХ ТРУБОПРОВОДОВ
2.1. Энергия деформаций в конечном элементе трубопровода
(теоретические предпосылки)
Расчёт накопленной энергии деформаций элемента трубопровода является одной из необходимых операций при решении некоторых задач, например при оценке напряженно-деформированного состояния сложных участков
трубопровода с учётом конструктивных особенностей и условий эксплуатации, при оценке прочности и безопасности трубопровода с учётом обнаруженных дефектов (задачи диагностики и механики разрушения). Так, на
участках активных грунтовых изменений (термопроявления в многолетнемерзлых грунтах, пучение, размыв, карстообразование, оползень) надёжность
и безопасность трубопроводов необходимо оценивать с учётом взаимодействия с грунтом, результирующих напряженного и энергетического
состояний.
Вообще говоря, напряжения, деформации, потенциальная энергия – величины тесно взаимосвязанные [17, 92]. Выбор методов решения (силовые,
энергетические, в перемещениях) зависит только от удобства и простоты
преобразований. Например, метод конечных элементов основан на том, что
участок трубопровода делится на множество фрагментов (элементов), в пределах каждого из которых допускается простое известное распределение
напряжений (перемещений), затем вычисляется суммарная энергия [52]. Равновесному состоянию участка соответствует минимум функции Лагранжа
[47].
Как отмечено выше, существует много вариантов метода конечных
элементов, отличающихся способами построения конечно-элементных сеток
и методами получения и решения уравнений, соответствующих общему рав-
21
новесному положению системы [14, 15, 24, 38, 43, 63, 91, 93, 94, 97, 105].
Нами разработан и усовершенствован простой вариант метода конечных
элементов, где конечно-элементная сетка представляет собой ряд соединенных друг с другом колец одинаковой длины h, получаемых делением участка
трубопровода плоскостями, перпендикулярными оси (рисунок 2.1) [31, 34,
40, 98, 99, 100, 101].
Рисунок 2.1 – Конечно-элементное моделирование трубопровода
(не показаны изгибающие и крутящие моменты)
Как известно из курса теоретической механики [47], функция Лагранжа
L представляет собой накопленную замкнутой системой потенциальную
энергию деформаций Э минус работа действующих внешних сил А:
L Э А.
(2.1)
Работа внешних сил определяется по известным формулам (произведение силы на перемещение или момента на угол поворота). А вот с накопленной потенциальной энергией не всё так очевидно.
Потенциальная энергия деформаций конечного элемента определяется
действующими в нём напряжениями. В общем случае могут появиться и
нормальные, и касательные напряжения в разных направлениях. Рассмотрим
их в системах координат (x, y, z) и (r, , z) по рисунку 2.2, выбрав в качестве
главных площадок соответствующие координатные плоскости.
22
Рисунок 2.2 – Конечный
элемент под действием
различных нагрузок
(давление и крутящий момент
не показаны; тоном выделено
распределение по сечению
продольных напряжений)
Нормальные напряжения в радиальном r и окружном направлениях, возникают от действия внутреннего или внешнего давления Р.
Нормальные напряжения в продольном направлении z зависят от
множества факторов: давления, температуры, технологии монтажа трубопровода, внешних нагрузок, действия грунта и воды. Все эти силы вместе формируют осевую силу N и изгибающий момент М, которые однозначно определяют продольные напряжения.
Касательные напряжения zy и zx образуются от действия поперечных (перерезывающих) сил Qу и Qx , касательные напряжения z от действия крутящего момента Мк. При этом существует взаимосвязь сил Qу и Qx
с распределенными силами q (рисунок 2.1).
Рассмотрим по отдельности, а затем вместе энергию деформаций, возникающих при действии различных видов нагрузок:
внутреннего Рв и внешнего Рн давлений;
поперечной составляющей распределённой нагрузки q ;
продольной составляющей распределённой нагрузки q ;
осевой нагрузки N ;
крутящего момента MZ ;
изгибающего момента в вертикальной плоскости МХ;
изгибающего момента в горизонтальной плоскости МУ.
23
1. Энергия радиальных деформаций от действия внутреннего Рв
и внешнего Рн давлений.
По толщине стенки радиальные напряжения описываются общим выражением вида [16, 80]:
b
r a 2 ;
r
где
a
R в Рв R н Рн
2
2
Rн Rв
2
2
;
b
(R в R н ) 2 (Р в Р н )
Rн Rв
2
2
,
(2.2)
Rн, Rв – радиусы сечения трубы (наружный и внутренний) (рисунок
2.2);
Pн, Pв – давления снаружи и внутри трубы;
r – полярная координата (расстояние от оси трубы);
Плотность энергии радиальных деформаций r .
2
2E
Энергия радиальных деформаций в конечном элементе:
2
2h R H
b
Э h d
a 2 r dr .
2E R B
r
(2.3)
Здесь и далее Е – модуль упругости металла; h – размер конечного
элемента вдоль трубы; – объём конечного элемента длиной h.
Раскрывая интеграл в выражении (2.3), получаем далее:
2
h R H
b
h R H 2 2ab b 2
Эh
a 2 r dr
a r
3 dr
E RB
E R B
r
r
r
RН
h a 2 r 2
b2
2ab ln r 2
E 2
2r R
(2.4)
B
R н b 2 1
h a 2
1
2
2
R н R в 2ab ln
2 2 .
E 2
Rв
2 Rв
R н
В выражение (2.4) параметры а и b входят в виде парных комбинаций a2, ab, b2. Но параметры a и b линейно зависят от давлений Рв и Рн, согласно выражениям (2.2). Следовательно, величина Эh от давлений зависит
квадратично.
Магистральные трубопроводы относятся к классу тонкостенных трубопроводов ( D н ), которые к тому же в основном работают только под
24
внутренним давлением. При этих условиях выражение для энергии элемента
можно значительно упростить.
Действительно, если внешнее давление отсутствует, то на наружной
поверхности радиальное напряжение равно нулю ( σr Pн 0 ), на внутренней поверхности равно давлению Рв с обратным знаком ( σ r Pв ). В пределах толщины стенки, которая мала по сравнению с радиусами Rн и Rв , распределение радиальных напряжений вполне можно считать линейным (от
σ r Pв при r R в до r 0 при r R в ). Тогда плотность энергии рас-
пределяется по толщине стенки по квадратичной зависимости (по параболе).
Если интегрировать по объёму элемента, получим следующее выражение
для энергии радиальных деформаций:
hF
2
Э h d r d
Pв .
6E
v
v 2E
2
(2.5)
Здесь и далее F D – площадь поперечного сечения трубы;
D – наружный диаметр трубы; – толщина стенки; – объём металла в конечном элементе.
Отметим, что выражение (2.5) получено только для тонкостенных труб,
находящихся только под внутренним давлением. Для более общих случаев
необходимо пользоваться выражением (2.4).
Здесь необходимо количественно определить границы применимости
упрощённой формулы (2.5). Для этого сравним результаты, вычисленные по
упрощённой и точной формулам. В таблице 2.1 приведены такие результаты
для случая
D 1000 мм ;
h 1м;
E 206 ГПа ;
Р В 5,0 МПа ;
РН 0.
Остальные параметры в таблице, где приняты обозначения: РВ и РН – внутреннее и наружное давления; – толщина стенки; Эh – энергия радиальных
деформаций в одном конечном элементе длиной h, рассчитанная по точной
(2.4) и приближенной (2.5) формулам; – относительная погрешность приближённого значения.
25
Таблица 2.1 – Сравнение энергий радиальных деформаций, рассчитанных
по точной и приближённой формулам (2.4) и (2.5)
соответственно
, мм
1
2
3
5
7
10
15
20
25
30
40
50
70
100
200
300
Эh по (2.4), Дж
0.06335
0.1263
0.1889
0.3130
0.4355
0.6164
0.9104
1.195
1.470
1.736
2.240
2.707
3.533
4.507
5.647
4.193
, %
0.20
0.40
0.60
1.01
1.43
2.05
3.122
4.22
5.346
6.50
8.923
11.48
17.07
26.88
80.05
218.3
Эh по (2.5), Дж
0.06348
0.1268
0.1901
0.3161
0.4417
0.6291
0.9389
1.245
1.549
1.849
2.440
3.018
4.137
5.719
10.17
13.34
Из таблицы следует, что приближенная формула (2.5) позволяет получать результаты с погрешностью не более 5 % при соотношении толщины
стенки к диаметру в пределах не более 2 %.
2. Энергия окружных деформаций от действия внутреннего Рв
и Рн. внешнего давлений
В общем случае окружные напряжения по толщине стенки описываются выражением вида [16, 80]:
b
r a 2 ;
r
a
R в Рв R н Рн
2
2
Rн Rв
2
2
;
b
(R в R н ) 2 (Р в Р н )
Rн Rв
2
2
где величины Rн, Rв, Pн, Pв, r имеют тот же смысл, что и выше.
Плотность энергии окружных деформаций
2
2E
.
Энергия радиальных деформаций в конечном элементе:
,
(2.6)
26
2
2h R H
b
Э h d
a 2 r dr .
2E R B
r
(2.7)
Раскрывая интеграл, получаем далее:
2
h R H
b
h R H 2
2ab b 2
Эh
a 2 r dr
a r
3 dr
E RB
E RB
r
r
r
RН
h a 2 r 2
b2
2ab ln r 2
E 2
2r R
(2.8)
B
R н b 2 1
h a 2
1
2
2
R н R в 2ab ln
2 2 .
E 2
Rв
2 Rв
R н
В выражение (2.8), как и в (2.4), параметры а и b входят в виде парных комбинаций a2, ab, b2; параметры a и b линейно зависят от давлений
Рв и Рн. Следовательно, величина Эh от давлений зависит квадратично.
Как отмечено выше, магистральные трубопроводы относятся к классу
тонкостенных трубопроводов ( D н ), которые к тому же в основном работают только под внутренним давлением. При этих условиях выражение для
энергии элемента можно значительно упростить. Действительно, если указанные условия соблюдаются, то используют следующую формулу для
окружных напряжений [20, 65]:
Р в (D 2) Р в R в
.
2
(2.9)
Тогда формула для плотности энергии окружных деформаций имеет вид:
2
2
Р R
в 2в . Интегрируя по объему элемента, получаем:
2E
Э h d 2 h
RH
RB
Рв R в
h Рв R в
r dr
2
2E
E 2
2
2
2
2
R н2 R в2
;
2
2
h R в (R н R в )
h F Rв
2
2
Эh
Р
Рв ;
в
2
2E
2E
2
Здесь, как и выше,
трубы.
2
2
(2.10)
F D – площадь поперечного сечения
27
Следует отметить, что выражение (2.10) получено только для тонкостенных труб, находящихся только под внутренним давлением. Для более
общих случаев необходимо пользоваться выражением (2.8).
Определим границы применимости упрощённой формулы (2.10). Для
этого сравним результаты, вычисленные по упрощённой и точной формулам.
В таблице 2.2 приведены такие результаты для случая D 1000 мм ; h 1 м ;
E 206 ГПа ; Р В 5,0 МПа ; Р Н 0 . Остальные параметры в таблице, где
приняты обозначения: – толщина стенки; Эh – энергия радиальных деформаций в одном конечном элементе длиной h, рассчитанная по точной (2.8) и
приближенной (2.10) формулам; – относительная погрешность приближённого значения. Из таблицы следует, что приближенная формула (2.10)
позволяет получать результаты с погрешностью не более 5 % при отношении
толщины стенки к диаметру в пределах до 25 %.
Таблица 2.2 – Сравнение энергий окружных деформаций, рассчитанных
по точной и приближённой формулам (2.8) и (2.10)
соответственно
Эh (2.8), Дж
Эh (2.10), Дж
, мм
, %
1
2
5
10
20
50
100
150
200
250
300
350
400
47420.
23590.
9295.
4531.
2152.
732.8
273.4
131.0
67.27
34.54
16.87
7.383
2.598
47420.
23590.
9295.
4531.
2152.
733.5
274.5
132.3
68.63
35.74
17.79
7.966
2.859
0.000033
0.00013
0.00084
0.0034
0.01388
0.0922
0.4091
1.022
2.018
3.487
5.483
7.898
10.07
Сравнение энергий радиальных и окружных деформаций, приведённых
в таблицах 2.1 и 2.2, показывает, что в диапазоне тех отношений толщины
28
стенки к диаметру, характерных для трубопроводного транспорта, при одних
и тех же рабочих давлениях энергия окружных деформаций в тысячи раз
больше энергии радиальных деформаций. Таким образом, в расчётах вполне
можно пренебречь вкладом радиальных напряжений. Это приведёт к погрешности не более 0,06 %.
3. Энергия продольных напряжений и деформаций
Продольные напряжения и деформации появляются от действия осевой
силы N и изгибающего момента Ми (рисунок 2.2) и могут быть рассчитаны
по формуле [80]:
N Ми у
σ о k r sin .
F
Jх
σ пр
Здесь o N / F осевое напряжение; k М и / J x ;
(2.11)
полярный угол, от-
считываемый от оси x в плоскости поперечного сечения трубы (на рисунке
2.2 ось х направлена по горизонтальному диаметру сечения);
Jх – момент инерции поперечного сечения трубы относительно оси х:
Rн Rв
.
J х y dF
4
2
4
4
(2.12)
Плотность энергии продольных деформаций:
σ пр
2
2Е
1
σ o k r sin 2 .
2Е
Энергия деформации участка трубы единичной длины:
Э1 dF
F
σ
R 2π
1 Н
2 E RВ
2
o
2 σ o k r sin k 2 r 2 sin 2 r dr d ;
0
R Rв
1 R Н 2 2
I1
o r dr d o 2 н
2E R В 0
2E
2
2
R 2π
I2
2
2
σ k Rн Rв
1 Н
2 σ o k r sin r dr d o
2 E RВ 0
E
3
R 2π
3
R
3
N2
;
2E F
cos
2π
2π
0
0;
Н
1
k2 Н 3
2 2
2
I3
k r sin r dr d
r dr sin 2 d =
2 E RВ 0
2 E RВ
0
29
Mи
Rн Rв
1 cos 2 d M и J π M и
=
;
x
2
2
0
4
2
2EJx
2 E J x
2 E J x
2
4
4
2π
2
2
2
M
N2
Э1 I1 I 2 I 3
и .
2E F 2E Jx
Энергия продольных деформаций в конечном элементе длиной h:
2
h N 2 M и
.
Эh
2E F
J x
(2.13)
Вклад продольных напряжений в общую энергию деформаций может
быть сопоставим, а иногда и больше вклада окружных деформаций, поскольку
нередки случаи повреждения трубопроводов по причине разрыва по стыкам
труб или гофрообразования. Причиной таких случаев является либо превышение продольными напряжениями некоторого предела, либо потеря устойчивости из-за появления сжимающих напряжений выше допустимого предела.
4. Энергия касательных напряжений и деформаций при кручении
Касательные напряжения при кручении под действием момента Мк
вычисляются по формуле [16, 80]:
z r
где
Mк
,
Jo
(2.14)
Jo – полярный момент инерции сечения трубы,
Rн Rв
J o r dF
2
2
4
Плотность энергии деформаций
где G
4
2J .
(2.15)
x
z
2
2G
r 2 Mк
2
2G Jo
2
,
E
– модуль сдвига металла трубы; – коэффициент Пуассона.
2 1
Энергия деформаций кручения трубы единичной длины:
Э1 dF
F
2 R Н
r 2 Mк
2
RB 2 G Jo
2
0
rdr d
Мк
2
2G Jo
2
R
2
4
н
Rв
4
4
Энергия деформаций кручения на участке трубы длиной h:
2
Мк
.
2G Jo
30
2
h MК
.
Эh
2G Jo
(2.16)
Отметим, что кручение трубопровода – относительно редкое явление.
Оно может встречаться на надземных участках с использованием компенсаторов, на переходах через дороги.
5. Энергия деформаций и напряжений от действия поперечной
(перерезывающей) силы Q
Действие поперечной силы Q сопровождается появлением момента
изгиба Ми, поэтому их необходимо рассматривать совместно, используя соответствующие условия равновесия [80]. Роль момента изгиба выражена в
формуле (2.13), поэтому здесь рассмотрим роль касательных напряжений.
Касательные напряжения от действия поперечной силы Q определяются по формуле Журавского [46]:
zy
Q Sx
,
Jx b
(2.17)
где b – ширина поперечного сечения стенки трубы на том уровне, на котором определяется zу; Sx – статический момент относительно нейтральной
оси отсеченной части поперечного сечения, расположенной над уровнем
y = const, на котором определяется касательное напряжение;
S x y dF1 ;
F1
F1 – площадь отсечённой части поперечного сечения трубы (рисунок 2.3);
Jх – момент инерции всего поперечного сечения относительно оси х.
Рисунок 2.3 – К определению касательных
напряжений; фоном выделена отсечённая
часть поперечного сечения трубы
31
Справедливо выражение
zy dF Q ,
где F – полная площадь попе-
F
речного сечения трубы.
Найдём наибольшее касательное напряжение, которое будет наблюдаться на нейтральной оси ( у 0 ). Для этого сначала найдем соответствующее значение Sx:
π RH
π
RH
0 RB
0
RB
Sx y dF1 r sin( ) r dr d sin( ) d r 2 dr
F1
Подставляя это в (2.17), получаем:
( zy ) max
4Q R н R в
.
3 R н 4 R в 4
3
3
2
3
3
Rн Rв .
3
(2.18)
Распределение касательных напряжений по сечению для одного из
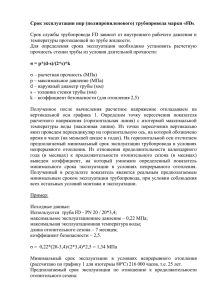
случаев (при D 530 мм ; 10 мм ; Q 100 Н ) рассчитано в Приложении 1
и графически показано на рисунке 2.4. Для этого случая максимальное касательное напряжение составляет 12,2 кПа.
Рисунок 2.4 – Распределение касательных напряжений и параметров b,
Sx в сечении трубопровода при D 530 мм ; 10 мм ;
Q 100 Н
Плотность энергии касательных деформаций при поперечном сдвиге определяется по формуле [46]:
zy
2
2G
.
32
Подставляя выражение (2.17), затем интегрируя по объёму конечного
элемента, получаем:
h Q2
.
Эh
2G F
(2.19)
Здесь использован полезный при расчётах безразмерный параметр:
F
Jx
2
2
Sx
b 2 dF ,
F
(2.20)
где F – площадь поперечного сечения трубы; Sx, Jx – статический момент и
момент инерции поперечного сечения. Полезность параметра в том, что
он, во-первых, позволяет выразить формулу (2.19) в простом и привычном
виде, аналогичном (2.13) и (2.16). Во-вторых, его числовое значение зависит
только от формы и относительных размеров поперечного сечения балки и не
зависит от её абсолютных размеров. Это позволяет раз и навсегда определить
его значение для рассматриваемых изделий (в нашем случае труб) и далее
пользоваться этим одним значением как постоянным.
Для труб относительным размером является только отношение толщины стенки к диаметру. В таблице 2.3 приведены вычисленные значения параметра в зависимости от отношения / D (Приложение 2).
Таблица 2.3 – Значения параметра для труб
/ D
/ D
0.2600E+00
0.2700E+00
0.2800E+00
0.2900E+00
0.3000E+00
0.3100E+00
0.3200E+00
0.3300E+00
0.3400E+00
0.3500E+00
0.3600E+00
0.3700E+00
0.3800E+00
0.3900E+00
0.1305E+01
0.1292E+01
0.1278E+01
0.1265E+01
0.1253E+01
0.1240E+01
0.1227E+01
0.1215E+01
0.1204E+01
0.1193E+01
0.1182E+01
0.1172E+01
0.1163E+01
0.1154E+01
1
0.1000E-01
0.2000E-01
0.3000E-01
0.4000E-01
0.5000E-01
0.6000E-01
0.7000E-01
0.8000E-01
0.9000E-01
0.1000E+00
0.1100E+00
0.1200E+00
0.1300E+00
0.1400E+00
0.1500E+01
0.1499E+01
0.1497E+01
0.1495E+01
0.1492E+01
0.1489E+01
0.1485E+01
0.1480E+01
0.1475E+01
0.1469E+01
0.1463E+01
0.1456E+01
0.1448E+01
0.1440E+01
2
33
Окончание таблицы 2.3
1
0.1500E+00
0.1600E+00
0.1700E+00
0.1800E+00
0.1900E+00
0.2000E+00
0.2100E+00
0.2200E+00
0.2300E+00
0.2400E+00
0.2500E+00
2
0.1431E+01
0.1422E+01
0.1412E+01
0.1402E+01
0.1391E+01
0.1379E+01
0.1368E+01
0.1356E+01
0.1343E+01
0.1330E+01
0.1318E+01
0.4000E+00
0.4100E+00
0.4200E+00
0.4300E+00
0.4400E+00
0.4500E+00
0.4600E+00
0.4700E+00
0.4800E+00
0.4900E+00
0.5000E+00
0.1146E+01
0.1139E+01
0.1133E+01
0.1127E+01
0.1123E+01
0.1119E+01
0.1116E+01
0.1114E+01
0.1112E+01
0.1111E+01
0.1111E+01
Как видим, безразмерный параметр для труб принимает значения в
пределах от 10/9 до 3/2. Для тонкостенных труб, применяемых в трубопроводном транспорте, значение можно принять постоянным, равным 1,5.
При этом погрешность составит не более 1 %. Таким образом, формулу энергии касательных напряжений в элементе длиной h от действия поперечной
силы Q можно записать так:
3h Q 2
.
Эh
4G F
(2.21)
Итак, подведём предварительный итог.
Полученные формулы (2.5), (2.10), (2.13), (2.16), (2.21) показывают, что
составляющие энергии, определяемые различными видами нагрузок, полностью разделены. Это позволяет рассматривать энергии деформаций от разных видов нагрузок по отдельности независимо друг от друга и затем сложить их в общую сумму. Таким образом, энергия деформации конечного
элемента (кольца длиной h) выражается следующей общей формулой:
2
2
h
h N2
h Q2
h Ми
h Mк
2
Эh
P F
,
2E
2E F 2G F
2E J x
2G J o
2
где безразмерные параметры 1 / 3 R в / ;
(2.22)
1,5 .
Взаимная независимость энергий деформаций от воздействия разных
нагрузок (Р, N, Q, МИ, МК) и простые их выражения позволяют значительно
34
упростить процедуру получения уравнений равновесия трубопровода в конечно-элементном представлении.
2.2. Влияние кривизны трубопровода на энергию деформаций
В предыдущем параграфе получены выражения для расчёта энергии
деформации элементов трубопровода без учёта его кривизны. Здесь попытаемся рассмотреть, как эти формулы будут трансформироваться с введением
кривизны [40, 41, 102, 103].
Энергия радиальных деформаций от действия внутреннего Рв
и внешнего Рн давлений
Кривизна трубопровода, по-видимому, изменит распределение радиальных напряжений, поскольку нарушается условие осесимметричности. Поэтому формулы (2.2) потеряют силу. Однако кривизна не повлияет на радиальные напряжения на внутренней и наружной поверхностях стенки трубы,
так как эти напряжения зависят только от давлений, которые от кривизны
никак не зависят. Притом условие тонкостенности также сохраняется, поэтому распределение радиальных напряжений можно приближенно считать линейным. Тогда сохраняются все условия применимости формулы (2.5), погрешность которой не более 5 % при / D 0,02 , и получаем известное выражение:
hF
2
Э h d r d
Pв .
6E
v
v 2E
2
Энергия
окружных
деформаций
от
действия
(2.23)
внутреннего
Рв
и внешнего Рн давлений
Эта составляющая энергии требует серьёзного анализа, так как даже в таком документе, как СНиП 2.05.06-85*, допущены некоторые неточности по отношению к окружным напряжениям в случаях, когда труба имеет кривизну.
Наиболее ярким примером такого случая является отвод. Поэтому найдем сначала окружные напряжения в стенке отвода, используя для этого рисунок 2.5.
35
Рисунок 2.5 – Расчётная модель
отвода
Решение построим, используя положения теоретической механики, в
частности, условия равновесия отдельных сечений и элементов. Так, условия
равновесия сил и моментов для сечения А1В1В2А2 можно записать в следующем виде [47]:
1 1 2 2 P dF ;
(2.24)
1 1 1 2 2 2 dM P .
Здесь приняты обозначения:
– толщина стенки трубы;
1, 2 – напряжения в стенке на внешней и внутренней частях;
Р – давление в трубе;
0 – радиус кривизны трубы по оси;
1 – радиус кривизны вогнутой части стенки трубы;
2 – радиус кривизны выпуклой части стенки;
1 0
D
;
2 2
2 0
1 А1В1 1 d ;
D
;
2 2
2 А 2 В 2 2 d ;
dF – площадь выделенной (затемнённой) полости трубы, которую
найдём интегрированием элементарных площадей:
r2
dF r d dr
r1
1
(r2 ) 2 (r1 ) 2 d .
2
Здесь интегрирование выполняется в пределах
36
от r1 0
D
D
до r2 0 .
2
2
Выполняя соответствующие подстановки, получаем:
2
2
1
D
D
dF d 0 0 0 (D 2) d .
2
2
2
r2
dMP P r 2 d dr – момент относительно точки О, создаваемый давr1
лением продукта Р на площади dF:
Выполняя интегрирование, получаем
P
D
D
dMP P r dr d 0 0
3
2
2
r1
r2
3
2
3
d P d ,
1
3
3
где 0 0,5 D 0 0,5 D .
3
Подставляя соответствующие выражения, из системы уравнений (2.24)
получаем следующую:
1 1 2 2 P
0 D 2
;
2
2
1 1 2 2 P .
(2.25)
Решая систему уравнений (2.25), найдем искомые напряжения по
внешней и внутренней образующим кривой трубы:
1 P
2 0 D 2
;
1 D
2 P
1 0 D 2
.
2 D
(2.26)
В качестве примера рассмотрим случай: Р В 5,0 МПа ; D 530 мм ;
10 мм ; 0 варьируется в широком диапазоне. На рисунке 2.6 показаны
графики зависимостей отношений 1 1 / 0 и 2 2 / 0 от радиуса кривизны участка, где 0 напряжение в прямой трубе при тех же условиях
(при нулевой кривизне).
37
Рисунок 2.6 – Графики зависимостей окружных напряжений от радиуса
кривизны трубы (отвода)
Пробные расчёты при других значениях диаметра трубы и толщины
стенки показали, что при соблюдении условия тонкостенности ( δ/D 0,02 )
отношения 1 / 0 и 2 / 0 практически не зависят от радиуса кривизны .
Следовательно, графики на рисунке 2.6 можно считать пригодными для всех
трубопроводов.
Энергию элемента трубы, имеющего длину h по осевой линии, следует определять интегрированием плотности энергии 2 /2E
по объёму
этого элемента. При этом следует учитывать, что длина образующих элемента неодинакова по окружности. В результате таких вычислений получаем
следующую зависимость энергии окружных напряжений от кривизны трубы:
Э Э 0 .
(2.27)
Здесь Э0 – энергия прямого элемента, вычисляемая по формуле (2.10);
Э энергия такого же элемента с радиусом кривизны по оси ;
поправочный множитель, учитывающий кривизну.
График зависимости ( 0 ) показан на рисунке 2.7. Она получена численным интегрированием и использованием формул (2.10) и (2.27).
38
Рисунок 2.7 – Графики зависимостей напряжений и энергии окружных
деформаций от радиуса кривизны трубы (отвода);
1 1 / 0 ; 2 2 / 0 ; Э / Э 0
Данные результаты показывают, что в области 0 / D 1,5 при расчёте
энергии окружных деформаций можно пренебречь влиянием кривизны трубы
и пользоваться ранее полученным выражением (2.10):
2
h F Rв
2
Эh
Рв .
2E
(2.28)
При этом погрешность вычислений не превысит 5 %.
Отметим, что на магистральных нефтегазопроводах в большинстве
случаев выполняется условие 0 / D 5 , а условие 0 / D 1,5 выполняется
всегда. Следовательно, при расчётах энергии окружных деформаций вполне
можно пренебречь кривизной трубопровода.
При расчётах окружных напряжений и прочности трубопровода на
кривых участках пренебрегать кривизной нельзя. Это следует из первой
формулы (2.26) и графика зависимости 1 ( 0 ) . Действительно, как видно из
таблицы 2.4, несущая способность кривого участка Р * существенно отличается от несущей способности прямого участка Р *0 . Величина 1 имеет тот же
смысл, что и коэффициент несущей способности соединительных деталей ,
39
используемый в СНиП 2.05.06. В таблице 2.4 приведены значения этого коэффициента. Как видим, рекомендуемые СНиП значения сильно занижены,
что может иметь негативные последствия при оценке безопасности трубопроводов.
Таблица 2.4 Влияние кривизны участка на прочность трубопровода
Коэффициент
из (2.26)
по СНиП
0 / D
1 1 / 0
Э / Э 0
Р* / Р*0
1,0
1,618
1,124
0,618
1,618
1,30
1,5
1,315
1,048
0,760
1,315
1,15
2,0
1,211
1,026
0,826
1,211
1,00
2,5
1,159
1,016
0,863
1,159
1,00
3,0
1,127
1,011
0,887
1,127
1,00
4,0
1,091
1,006
0,916
1,091
1,00
5,0
1,071
1,004
0,934
1,071
1,00
6,0
1,058
1,003
0,945
1,058
1,00
7,0
1,049
1,002
0,953
1,049
1,00
8,0
1,043
1,002
0,959
1,043
1,00
Примечание – выделены отклонения более 5 % от прямой трубы.
Энергия продольных напряжений и деформаций при изгибе
Изгиб трубы с исходной кривизной приводит к смещению нейтрального слоя в сторону центра кривизны на некоторое расстояние (рисунок 2.8)
[46]:
dF
.
F
0 с 0 F /
(2.29)
Здесь F – площадь поперечного сечения трубы; – радиус-вектор, отсчитываемый от центра кривизны Ц; 0 – радиус кривизны оси трубы; с – радиус
кривизны нейтрального слоя. Распределение продольных напряжений от
действия изгибающего момента М определяется формулами:
40
пр
M с
1 ;
F
dF
.
F
с F /
(2.30)
Энергию продольных напряжений элемента от действия изгибающего
момента можно определить по известной формуле:
Эh
пр
2
2Е
d ,
(2.31)
где объём элемента (части трубы, имеющей длину h по оси). В данном
случае аналитические расчёты громоздки, поэтому проведём некоторые исследования численным методом, используя для этого элементы программирования.
Рисунок 2.8 – Отвод под
действием
изгибающего
момента
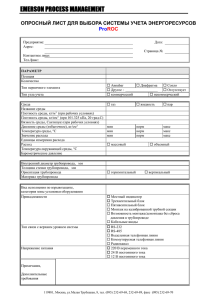
На рисунке 2.9 приведены графики распределения продольных напряжений по сечению трубы при разных значениях радиуса кривизны по оси 0,
но при одинаковых других параметрах. Графики подтверждают смещение
нейтрального слоя в сторону центра кривизны. Они также показывают, что с
уменьшением радиуса кривизны увеличивается максимальное значение продольных напряжений. Но при отношениях радиуса кривизны к диаметру трубы, превышающих значение 5, влиянием кривизны практически можно пренебречь.
41
Рисунок 2.9 – Графики распределения продольных напряжений
в стенке кривой трубы под действием изгибающего
момента при D 1000 мм ; 20 мм ; М 1,5 МН м
и разных значениях радиуса кривизны по оси 0
Влияние кривизны на энергию продольных напряжений при изгибе
можно исследовать сопоставлением двух величин, соответствующих кривой
и прямой трубам при других одинаковых параметрах. Для этого введём специальную величину Э / Э 0 , где энергия Э определяется по формуле
(2.31), энергия Э0 по формуле, соответствующей прямой трубе. Как показали численные исследования, параметр зависит в основном только от относительной кривизны трубы. График этой зависимости при /D 0,02 показан на рисунке 2.10. Причём, графики остаются почти неизменными при
изменении толщины стенки в пределах 0 /D 0,1.
Полученные результаты показывают, что в области 0 1,1 D параметр может отличаться от единицы не более чем на 5 %. На магистральных трубопроводах, где обычно выполняется условие 0 5 D , с погрешностью не более 0,3 % можно принять 1. Следовательно, в расчётах энергии деформаций от действия изгибающего момента кривизной трубы можно
42
пренебречь и пользоваться той же формулой (2.13), которая получена для
прямых трубопроводов:
2
h Mи
Э
.
2E J x
(2.32)
Здесь h – длина элемента трубы, отсчитываемая по осевой линии; Ми – изгибающий момент; Jx – момент инерции поперечного сечения трубы относительно диаметра поперечного сечения трубы.
Рисунок 2.10 – График зависимости параметра от относительной
кривизны трубы
Энергия продольных деформаций от действия нормальной силы N,
крутящего момента Мк и поперечной силы Q с появлением кривизны трубопровода никак не изменится. Так распределение соответствующих напряжений в сечении трубы останется таким же, как и на прямых участках трубопроводов.
Таким образом, в области / D 0,02 и 0 / D 1,5 кривизна трубы
влияет на энергетическое состояние магистральных трубопроводов в пределах не более 5 %. Поэтому в расчётных методах, основанных на конечноэлементных моделях, вполне допустимо пользоваться формулами, полученными для прямых труб:
43
2
2
h
h N2
h Q2
h Ми
h Mк
2
Эh
P F
.
2E
2E F 2G F
2E J x
2G J o
(2.33)
2.3. Способы описания конфигурации трубопровода и построения
конечно-элементной сетки
Трубопровод обычно состоит из прямых и кривых участков. Но при
укладке в траншею прямые участки могут деформироваться и получать некоторую кривизну. Эти участки будем называть условно прямыми исходя из
того, что в ненапряженном состоянии они стали бы опять прямыми.
Кривые участки также могут изменять свою кривизну под действием
внешних факторов, в том числе при укладке в траншею. Но в ненапряженном
состоянии они принимают свою исходную кривизну.
Границы прямых и кривых участков обозначим точками C1, C2, C3, C4
и т.д. (рисунок 2.11)
В трубопроводном транспорте местоположение точек на трубопроводе
принято определять через условные километры или пикеты. При этом за
начало принимается известная точка, например начало линейной части трубопровода. Для удобства вдоль трассы трубопровода расставляют столбы с
указанием километров и пикетов. С развитием технологии внутритрубной
диагностики стали пользоваться понятием «дистанция», которое имеет тот
же смысл, что и километр, но определяется одометром внутритрубного снаряда-дефектоскопа.
Исходя из этого, местонахождение точек определим через их криволинейные координаты s1, s2, s3, s4 и т.д., где ось s – длина оси трубопровода
от некоторого общего начала до этих точек. Величина s – скалярная
величина.
Для обозначения направлений удобно ввести также систему координат
(xyz) прямоугольную подвижную, привязанную к трубопроводу следующим
образом:
44
ось z направлена по касательной к оси трубопровода (рисунок 2.11);
ось х направлена горизонтально и перпендикулярно оси трубопровода;
ось у направлена перпендикулярно плоскости xz (вверх);
плоскость ху перпендикулярна оси трубы;
плоскость yz вертикальна.
Рисунок 2.11 – Схема трубопровода, состоящего из прямых и кривых
участков (вид сверху, пример)
При прохождении кривых участков оси координат х, у, z меняют
направления.
При деформировании трубопровода под действием рабочих нагрузок и
других сил и воздействий его положение и конфигурация могут меняться;
точки трубопровода получают смещения относительно ненапряженного состояния. Смещения в направлениях осей координат x, y, z обозначим соответственно u, v, w.
Таким образом, исходное положение точек трубопровода и его конфигурация определяются координатой s, отсчитываемой по оси, и распределением кривизны Kx(s) и Ky(s) вдоль трубопровода. Деформированное состояние трубопровода определяется смещениями точек u(s), v(s), w(s). По этим
функциям можно рассчитать деформации и напряжения в любой точке трубопровода. В ненапряженном состоянии смещения всех точек u, v, w равны
нулю.
45
На преимущественно прямых участках трубопроводов удобнее применять неподвижную систему координат (XYZ), где ось Z рекомендуется
направлять по прямой, соединяющей начало и конец участка. Тогда исходную конфигурацию участка задают функциями X(Z) и Y(Z). Деформированное состояние трубопровода задаётся (или определяется) функциями U(Z),
V(Z), W(Z), где координата Z выполняет роль аргумента (аналогично координате s в предыдущем случае).
С дальнейшим развитием технологии внутритрубной диагностики (с
началом использования снарядов с навигационными приборами) появилась
~ ~ ~
потребность в использовании глобальной системы координат ( X, Y, H ), свя~
занной с Землёй. Эта система также является декартовой. При этом ось X
~
~
направлена на восток, Y – на север, H – вверх. Однако в этой системе координат работать неудобно, поэтому обычно переходят к одной из систем координат, непосредственно привязанных к трубопроводу.
Кривизну участков в горизонтальной и вертикальной плоскостях обозначим соответственно К х
1
1
и Ку
. Здесь х и у – радиусы крих
у
визны участков в плоскостях zx и zy.
В общем случае кривизна меняется при деформировании трубопровода. Поэтому под величинами Кх, Ку и х у будем понимать кривизну и
радиусы кривизны в ненапряженном состоянии трубопровода.
Кривизна может быть положительной или отрицательной. Значения Кх
и Ку положительны, если вогнутость кривой направлена в сторону положительных осей х и у соответственно.
Итак, для задания конфигурации участка трубопровода рекомендуется:
разбить заданный участок на прямые и кривые участки, определить их
длины s12, s23, s34 и т.д.;
задать кривизну каждого участка К12, К23, К34 и т.д. с учетом знаков;
46
задать координаты точек граничных и разделяющих прямые и кривые
участки С1(s1), С2(s2), С3(s3), С4(s4) и т.д.; возможно также задать любые
промежуточные точки.
Далее можно приступить к построению конечно-элементной сетки. Для
этого следует задать узлы, начиная от начала (точки С1) с постоянным шагом
h. В расчётах магистральных трубопроводов удобно выбрать h 1 м . Пронумеруем узлы и элементы, как показано на рисунке 2.12.
Рисунок 2.12 – Нумерация узлов и элементов в конечно-элементной
модели (элемент с номером i затемнён)
Координаты всех узлов конечно-элементной сетки определим интерполяцией по координатам заданных граничных и промежуточных точек С1, С2,
С3, С4 и т.д..
Также определим исходную кривизну для каждого конечного элемента.
Поскольку в процессе решения задачи положения узлов будут меняться
(смещаться под действием сил), обозначим все параметры в начальный момент дополнительным индексом «0», текущие значения – без индекса «0»:
s(i) – координаты узлов с номерами (i) в ненапряженном состоянии);
u(i), v(i), w(i) – текущие смещения узлов с номерами (i) ;
Kх(i) – исходная кривизна элемента (i) в плоскости xz;
Kу(i) – исходная кривизна элемента (i) в вертикальной плоскости yz;
47
2.4. Вычисление энергии элементов по координатам узлов
конечно-элементной сетки
Напомним, что метод конечных элементов состоит в том, чтобы найти
такое положение всех узлов, чтобы общая энергия была наименьшей. При
действии внешних сил минимальной должна быть функция Лагранжа – разность энергии и работы этих сил. Поэтому, чтобы реализовать процесс минимизации, необходимо выразить энергии элементов через координаты узлов.
Для этого зададимся следующими исходными данными применительно
к стальным трубопроводам:
D – диаметр труб наружный, м;
– толщина стенки, м;
E 206 10 9 Па – модуль упругости металла труб;
0,3 – коэффициент Пуассона металла трубы;
0,00012 град 1 – коэффициент температурного расширения линей-
ный;
h – длина конечного элемента, отсчитываемая по оси s, м;
Р – рабочее давление, Па;
t – температура эксплуатации, С;
t0 – температура трубопровода при укладке в траншею, С;
По этим данным определим следующие вспомогательные величины:
R н D / 2 – радиус сечения трубы наружный, м;
R в (R н δ) – радиус сечения трубы внутренний, м;
G
E
– модуль сдвига металла трубы, Па;
21
F Rн Rв
2
2
– площадь поперечного сечения труб, м ;
2
48
R
0,25 в
2
– безразмерный параметр, участвующий в формулах
(2.22) и (2.33);
1,5
– безразмерный параметр, соответствующий тонкостенным
трубопроводам ( / D 0,02 );
4
4
Rн Rв
4
Jx Jу
– момент инерции поперечного сечения трубы
относительно осей х и у , м4;
Jo
4
4
R н R в – полярный момент инерции сечения трубы, м4.
2
Также следует задать исходную кривизну на всех конечных элементах
(рисунок 2.12):
K x (i )
K y (i )
1
x (i )
1
y (i )
– исходная кривизна элемента (i) в плоскости xz, м-1;
– исходная кривизна элемента (i) в вертикальной плоско-
сти yz, м-1;
х(i) – радиус исходной кривизны элемента (i) в плоскости xz, м;
у(i) – радиус исходной кривизны элемента (i) в вертикальной плоскости yz, м.
Рассмотрим далее выражения, отражающие зависимость различных составляющих энергии деформаций от смещений узлов.
2.4.1. Вычисление энергии в подвижной системе координат
Привязка трубопровода к подвижной системе координат (xys) показана
на рисунке 2.11. В этой системе перемещения узлов обозначим u(i), v(i), w(i).
1. Энергия элемента (i) за счёт действия внутреннего давления Р в соответствии с формулой (2.22) имеет вид:
Э Р(i)
h
P2F .
2E
(2.34)
49
В этой формуле координаты узлов не участвуют. Поэтому эта часть
энергии не зависит явно от положения узлов, а при смещении узлов вариация
этой энергии равна нулю: Э Р(i ) 0 . Следовательно, при построении конечно-элементных уравнений равновесия эта часть энергии участвовать не будет.
Однако существует неявная (через другие параметры) зависимость
энергии от давления Р, например через осевую силу N.
2. Энергия элемента (i) за счёт действия осевой силы N:
Э N(i)
h N2
.
2E F
(2.35)
Сила N участвует в формировании осевых деформаций. Учитывая, что
осевые деформации определяются также рабочим давлением Р и температурой Т, суммарная осевая деформация имеет вид
z z( Р) z(Т ) z( N) .
(2.36)
Полная осевая деформация, по определению, связана с изменением
длины элемента трубы следующим образом:
z
где
0
,
0
(2.37)
– длина участка (или элемента) трубы в состоянии эксплуатации;
0 – длина того же участка (или элемента) в начальном (ненапряжен-
ном) состоянии трубопровода.
Осевая деформация от действия рабочего давления Р определяется
формулой:
z(P)
P P D 2
P D 3
r
.
E
E 2
2
E
2
(2.38)
Здесь r и – радиальное и кольцевое напряжения при условии, когда действует только давление Р (температура Т и осевая сила N отсутствуют).
Температурная деформация определяется так:
z (Т ) Т Т 0 .
(2.39)
50
Здесь Т и Т0 – температура эксплуатации и начальная температура (укладки)
соответственно; – линейный коэффициент теплового расширения металла.
Деформация от действия осевой силы:
z( N)
N
.
E EF
(2.40)
Подставляя (2.37), (2.38), (2.39), (2.40) в выражение (2.36) и решая относительно N, получаем:
0
P D 3
N
;
Т Т 0
0
E
2
EF
N EF
0
D 3 E F Т Т ;
PF
0
0
2
N F E z F 0 ;
0 P
D 3 E Т Т .
0
2
(2.41)
Отсюда для конечного элемента (i) можно записать:
N (i ) F E (i ) 0 ;
где
(i )
(i ) 0(i )
0(i )
(i )
h
1,
(2.42)
(i ) – длина элемента (i) в рабочем состоянии;
0 (i ) – длина того же элемента в начальном (ненапряженном) состоя-
нии трубопровода, отсчитываемая по кривой s.
Таким образом, рассчитать осевую силу в элементе (i) можно по заданным смещениям узлов (i) и (i+1) по следующему алгоритму (рисунок 2.13).
Рисунок 2.13 – К оценке расстояний между узлами по заданным
смещениям в криволинейной системе координат
51
Если кривизна отсутствует, то осевую деформацию (i) найти по формулам:
(i )
(i )
1;
h
0(i ) h ;
(2.43)
(i) (u (i 1) u (i) ) 2 (v (i 1) v (i) ) 2 (h w (i 1) w (i) ) 2 .
Если кривизна присутствует, то для определения осевой деформации
выполнить следующие вычисления:
1) найти радиусы и углы, опирающиеся на конечный элемент (i):
x (i ) h / x (i ) ;
у (i ) h / у (i ) ;
( i ) ( х ( i ) ) 2 ( у ( i ) ) 2 ;
2
1
п (i )
2
1 1
.
х (i ) у (i )
x (i ) h K x (i ) ;
у (i ) h K у (i )
(i ) h K (i) h (K х (i ) ) 2 (K у (i ) ) 2 ;
или
(2.44)
(2.44а)
п (i ) 1 / K (i ) ;
2) найти координаты узлов (i) и (i+1) в системе координат xyz, связанной с узлом (i), с учётом смещений при деформировании:
x (i ) u (i ) ;
y (i ) v (i ) ;
z (i ) w (i ) ;
x (i 1) ρ x(i) 1 сos(α х(i) ) u (i 1) сos(α x(i) ) w (i 1) sin( α x(i) ) ;
y (i 1) ρ y(i) 1 cos(α y(i) ) v (i 1) cos(α y(i) ) w (i 1) sin( α y(i) ) ;
(2.45)
z (i 1) ρ п(i) sin( α п(i) ) w (i 1) cos(α п(i) ) u (i 1) sin( α x(i) ) v (i 1) sin( α y(i) ) .
Для обеспечения симметричности выражений относительно узла (i) допускается пользоваться следующими выражениями:
1 cos(α ) v
52
x (i 1) ρ x(i) 1 cos(α х(i) ) u (i 1) cos(α x(i) ) w (i 1) sin( α x(i) ) ;
y (i 1) ρ y(i)
y(i)
(i 1)
cos(α y(i) ) w (i 1) sin( α y(i) ) ;
z (i 1) ρ п(i) sin( α п(i) ) w (i 1) cos(α п(i) ) u (i 1) sin( α x(i) ) v (i 1) sin( α y(i) ) ;
1 cos(α ) v
x (i 1) ρ x(i) 1 cos(α х(i) ) u (i 1) cos(α x(i) ) w (i 1) sin( α x(i) ) ;
y (i 1) ρ y(i)
y(i)
(i 1)
(2.45а)
cos(α y(i) ) w (i 1) sin( α y(i) ) ;
z (i 1) ρ п(i) sin( α п(i) ) w (i 1) cos(α п(i) ) u (i 1) sin( α x(i) ) v (i 1) sin( α y(i) ) .
3) найти расстояние между узлами (i) и (i+1) до и после смещений:
0(i) 2 ρ п sin(0,5 α п ) ;
(i ) ( x (i1) x (i ) ) ( y (i1) y (i ) ) (z (i1) z (i ) )
2
2
(2.46)
2
или, в случае использования формул (2.45а):
0(i) 2 ρ п sin( α п ) ;
(i ) ( x (i1) x (i1) ) ( y (i1) y (i1) ) (z (i1) z (i1) ) ;
2
2
(2.46а)
2
4) найти осевую деформацию в элементе (i):
(i )
(i ) 0(i )
0(i )
.
(2.47)
Аналогично можно записать формулы для сил, деформаций и энергий
всех других элементов. Но при варьировании положения одного узла (i) изменения претерпевают только энергии двух смежных элементов с номерами
(i) и (i-1). Поэтому нам достаточно рассматривать сумму энергий только этих
двух элементов (рисунок 2.14): Э N Э N(i-1) Э N(i) .
(2.48)
Рисунок 2.14 – Элементы (выделены затемнением), в которых энергия
ЭN явным образом зависит от положения узла (i)
53
При вычислении энергии ЭN(i-1), деформации (i-1), длины (i1) можно пользоваться соответствующими формулами для элемента (i), сделав перестановки i i 1 и i 1 i .
3. Энергия элемента (i) за счёт действия внешней поперечной (перерезывающей) силы Q:
2
h Q (i )
.
2G F
Э Q(i)
(2.49)
Сила Q участвует в формулах для касательных напряжений и связана
со смещениями по формулам:
Qx
dM у
ds
E Jу
d 3u
;
ds3 (i )
Qy
dM х
d3v
E Jx 3 ;
ds
ds (i )
Q (i ) Q x Q y ;
2
2
2
(2.50)
(2.51)
u 3u i1 3u i u i1
d 3u
i2
;
3
ds (i )
h3
v i 2 3v i1 3v i v i1
d v
.
ds3 (i )
h3
(2.52)
3
Аналогично можно получить выражения для другиз узлов:
для узла (i-1)
u 3u i 3u i1 u i2
d 3u
i1
;
3
ds (i1)
h3
(2.52а)
для узла (i-2)
u i 3u i1 3u i2 u i3
d 3u
;
ds3 (i2)
h3
(2.52б)
для узла (i+1)
u 3u i 2 3u i1 u i
d 3u
i 3
.
3
ds (i1)
h3
(2.52в)
Из группы формул (2.52) – (2.52в) можно видеть, что смещение узла (i)
приводит к изменению энергии группы элементов (i-2), (i-1), (i), (i+1). Энергии других элементов не зависят от положения узла (i). Поэтому нам достаточно рассмотреть сумму энергий этих четырёх элементов (рисунок 2.15):
54
ЭQ ЭQ(i-2) ЭQ(i-1) ЭQ(i) ЭQ(i1) .
(2.53)
Рисунок 2.15 – Элементы, в которых энергии ЭQ и ЭМи зависят от узла (i)
При вычислении энергий ЭQ(i-2) , ЭQ(i-1) , ЭQ(i+1) можно пользоваться
формулами (2.49) – (2.52), изменив при этом номера всех участвующих узлов
на 2, 1, +1 соответственно (аналогично выражениям (2.52, а, б, в)).
4. Энергия элемента (i) за счёт действия изгибающего момента МИ:
2
h М и (i )
.
Э Ми(i)
2E
Jx
(2.54)
Изгибающий момент МИ находится из следующих формул:
M и(i) М x М y ;
2
2
2
(2.55)
u (i 2) u (i1) u (i ) u (i1)
d 2u
;
М х E J х 2 E J х
2
ds (i )
2
h
Мy E Jу
v (i 2) v (i1) v (i ) v (i1)
d v
.
E
J
у
2
ds 2 (i )
2
h
(2.56)
2
Из группы формул (2.54) – (2.56) можно видеть, что смещение узла (i)
приводит к изменению энергии группы элементов (i-2), (i-1), (i), (i+1). Поэтому для получения условий локального равновесия узла (i) достаточно рассматривать сумму энергий этих четырёх элементов, как и в предыдущем случае:
Э Ми Э Ми(i-2) Э Ми(i-1) Э Ми(i) Э Ми(i1) .
(2.57)
При вычислении энергий ЭМи(i-2) , ЭМи(i-1) , ЭМи(i+1) можно пользоваться
формулами (2.54) (2.56) для элемента (i), изменив при этом номера всех
участвующих узлов на 2, 1, +1 соответственно.
55
5. Энергия элемента (i) за счёт действия крутящего момента МК:
2
h Mк
.
Э М к(i)
2G J o
(2.58)
В этой формуле не участвуют координаты узлов. Поэтому вариация
этой энергии при смещении узлов u(i), v(i), w(i) равна нулю: Э Мк(i ) 0 . Следовательно, в конечно-элементных уравнениях равновесия вклад этой части
энергии отсутствует (эффект кручения в данной методике не рассматриваем).
Соберём все слагаемые энергии деформаций, в которых явным образом
участвуют координаты узла (i):
Э (i ) Э N(i-1) Э N(i)
Э Q(i-2) Э Q(i-1) Э Q(i) Э Q(i1)
(2.59)
Э М и(i-2) Э М и(i-1) Э М и(i) Э М и(i1) .
В каждом из слагаемых последнего выражения (2.59) участвует хотя
бы одна из координат узла (i): u(i), v(i), w(i). В то же время можно вполне уверенно утверждать, что во всех других слагаемых энергии деформаций конечно-элементной сетки не участвует ни одна из координат узла (i): u(i), v(i), w(i).
Поэтому, если взять частную производную от суммарной энергии деформаций всей конечно-элементной сетки по координатам узла (i), то отличными
от нуля будут только производные от суммы (2.59).
Таким образом, в сумме (2.59) собраны только такие слагаемые энергии деформаций, производные которых по координатам узла (i) могут отличаться от нуля.
Отметим здесь, что вместо формул (2.56), (2.57), (2.59) могут быть использованы следующие формулы, симметризированные относительно узла (i)
за счёт другой формы представления второй производной:
u (i1) 2 u (i ) u (i1)
d 2u
;
М х E J у 2 E J у
2
ds (i )
h
(2.60)
v (i1) 2 v (i ) v (i1)
d2v
;
E
J
x
2
ds 2 (i )
h
(2.61)
Мy E Jx
56
Э Ми Э Ми(i-1) Э Ми(i) Э Ми(i1) ;
(2.62)
Э(i ) Э N(i-1) Э N(i) ЭQ(i-2) ЭQ(i-1) ЭQ(i) ЭQ(i1) Э Ми(i-1) Э Ми(i) Э Ми(i1) . (2.63)
В большинстве практических задач пренебрегают вкладом касательных
напряжений от действия перерезывающих сил Q. Тогда остаются только слагаемые от действия продольных сил N и изгибающего момента:
Э (i ) Э N(i-1) Э N(i) Э Ми(i-1) Э Ми(i) Э Ми(i1) .
(2.64)
2.4.2. Некоторые особенности неподвижной системы координат
При выборе неподвижной системы координат необходимо знать некоторые важные особенности:
1) при вычислении производных необходимо учитывать кривизну трубы. Например, на кривых участках производные типа dV dZ будут отличаться от нуля даже в том случае, когда смещений нет и труба находится в ненапряженном состоянии;
2) в выражениях силовых характеристик также должна быть учтена
кривизна.
Учитывая эти две особенности, просмотрим выражения (2.34) – (2.64) и
остановимся только на тех, которые будут иметь другой вид.
Осевая деформация (i) определяется по следующим формулам независимо от кривизны участка:
(i )
(i )
h
1;
0(i ) h ;
(2.43б)
(i ) ( U (i1) U (i ) ) 2 (V(i1) V(i ) ) 2 (h W(i1) W(i ) ) 2 .
При вычислении энергии i-элемента за счёт действия внешней поперечной (перерезывающей) силы Q по формуле (2.50) силы Qx и Qy следует
вычислять по формулам:
57
d 3 U dK x
d d2U
Q х E J у 2 K x E J x 3
dZ dZ
dZ
dZ
(i )
U (i 2) 3 U (i 1) 3 U (i ) U (i 1) K x (i 1) K x (i )
;
E J y
h
h3
(2.50б)
V(i2) 3 V(i1) 3 V(i ) V(i1) K y (i1) K y (i )
.
Q х E J x
h
h3
При вычислении энергии элемента (i) за счёт действия изгибающего
момента МИ по формуле (2.54) моменты Mx и My следует вычислять по формулам:
d2U
U (i1) 2U (i ) U (i1)
М х E J у 2 K x E J у
K
х(i)
;
h2
dZ
(i )
V(i 1) 2V(i ) V(i 1)
М y E J x
K y(i) .
2
h
(2.60б)
(2.61б)
2.5. Условия равновесия конечно-элементной модели трубопровода
Условию равновесия трубопровода соответствует минимум функции
Лагранжа, определяемой по формуле:
L Э А min,
где
(2.65)
Э – энергия деформации рассматриваемого участка трубопровода;
А – работа внешних сил, действующих на трубопровод.
Отсюда можно утверждать, что условию равновесия трубопровода со-
ответствует равенство нулю вариации функции Лагранжа при любых вариациях смещений всех узлов:
L (Э A) 0 .
(2.66)
Условие (2.66) должно соблюдаться для всех узлов. Отсюда можем записать:
L (i)
L
L
L
u (i )
v (i )
w (i ) 0 ,
u (i )
v (i )
w (i )
(2.67)
58
где
i 1, 2, 3, ... n ; n – количество узлов в конечно-элементной сетке;
u (i ) , v (i ) , w (i ) – произвольные малые смещения узла (i).
Равенство (2.67) выполняется при любых значениях u (i ) , v (i ) , w (i )
только в одном случае – когда на всех узлах (i) одновременно равны нулю
все частные производные от функции Лагранжа:
L
0;
u (i )
L
0;
v (i )
L
0.
w (i )
(2.68)
Отсюда, используя выражение (2.65), можем записать:
Э
А
Э
А
Э
А
0 ;
0 ;
0 .
u (i ) u (i )
v (i ) v (i )
w (i ) w (i )
(2.69)
Полученные уравнения (2.69) являются основой для построения численного решения задачи. Но их пока невозможно решить ввиду того, что все
они являются неявными относительно искомых величин (смещений узлов).
Поэтому воспользуемся несколькими полезными предложениями:
1) в уравнениях (2.69) вместо полной энергии Э можно использовать
выражение Э(i) в виде формулы (2.59) или (2.63), поскольку их производные
одинаковы:
Э Э (i )
;
u (i ) u (i )
Э Э (i)
;
v (i ) v (i )
Э (i)
Э
;
w (i ) w (i )
(2.70)
2) работа внешних сил А определяется как сумма произведений всех
сил, действующих на все узлы конечно-элементной сетки, на смещения этих
узлов. На узлы действуют поперечные внешние силы q(z) и продольная внутренняя сила N(z). Причём, продольные силы действуют в положительном и
отрицательном направлениях, поэтому помимо продольной составляющей
внешних сил q(z) надо найти равнодействующую N , которая зависит от
кривизны участка.
59
Равнодействующая N направлена перпендикулярно к оси трубы и
имеет две проекции: N x и N y , которые определяются по следующим
формулам (рисунок 2.16):
Рисунок 2.16 –
К определению
равнодействующей
N
ΔN х (i) N i sin( α x (i) β x (i) ) N (i 1) sin( α x (i 1) β x (i 1) ) ;
ΔN y (i) N i sin( α y (i) β y (i) ) N (i 1) sin( α y (i 1) β y (i 1) ) ;
(2.71)
ΔN z (i) N i cos(α (i) β (i) ) N i 1 cos(α (i 1) β (i 1) ) ,
где
x (i ) и y (i ) углы поворота оси трубы на конечном элементе (i) за
счёт неодинакового смещения узлов под действием поперечных нагрузок;
x ( i1) и y ( i1) то же на конечном элементе (i-1);
x ( i ) и y ( i ) углы поворота оси трубы на конечном элементе (i) за счёт
исходной кривизны участка;
x (i1) и y (i1) то же на конечном элементе (i-1).
Данные углы определяются по следующим формулам:
u u
α x (i) arcsin i 1 i ;
h
u u
α x (i 1) arcsin i 1 i ;
h
v v
α y (i) arcsin i 1 i ;
h
x (i )
y (i )
v v
α y (i 1) arcsin i 1 i ;
h
(2.72)
h
h
0,5 h K x (i ) ; x (i1)
0,5 h K x (i1) ;
2 x (i )
2 x (i1)
h
0,5 h K y (i ) ;
2 y (i )
y (i1)
h
2 y (i1)
(2.73)
0,5 h K y (i1) ,
60
где
x ( i ) и y ( i ) радиусы исходной кривизны на конечном элементе (i);
x (i1) и y (i1) то же на конечном элементе (i-1);
K x ( i ) и K y ( i ) исходная кривизна на конечном элементе (i);
K x (i1) и K y (i1) то же на конечном элементе (i-1).
В случае малых деформаций, пренебрегая малыми величинами более
высоких порядков, можно записать выражения (2.71) в следующем виде:
ΔN х (i) N i [(α x (i) β x (i) ) (α x (i 1) β x (i 1) )]
u 2 u i u i 1
N i i 1
h K x (i) ;
h
ΔN y (i) N i [(α y (i) β y (i) ) (α y (i 1) β y (i 1) )]
(2.74)
v 2 v i v i 1
N i i 1
h K y (i) ;
h
N z (i ) N i N i 0 ;
3) вариация работы при вариации смещений узлов:
А (h q x (i ) N x (i ) ) u (i ) (h q y (i ) N y (i ) ) v (i ) h q z (i ) w (i ) . (2.75)
i
Отсюда имеем:
А
А
А
h q x (i ) N x (i ) ;
h q y(i ) N y (i ) ;
h q z (i ) .
u (i )
v (i )
w (i )
(2.76)
Здесь выражения вида (h q ) имеют смысл внешних сил, приведенных к
одному узлу (или одному элементу длиной h);
4) с учётом (2.70) и (2.76) условия равновесия (2.69) получают следующий вид:
Э (i )
u (i )
h q x (i ) N x (i ) 0 ;
Э (i )
w (i )
Э (i )
v (i )
h q y (i ) N y (i ) 0 ;
(2.77)
h q z (i ) 0 ;
61
5) решение системы уравнений (2.77) эквивалентно минимизации локальной функции Лагранжа L(i) в виде:
L (i ) Э (i) A (i ) ,
где величина Э(i) определяется по формуле (2.63) или (2.64); работа при вариации смещений имеет вид:
A (i ) (h q x (i ) N x (i ) ) u (i ) (h q y (i ) N y (i ) ) v (i ) h q z (i ) w (i ) . (2.78)
Особенностью локальных функций L(i) является то, что для локальной
области узла (i) они приводят к таким же условиям равновесия, что и общая
функция Лагранжа. Это означает, что в каждой локальной области положение узла (i) отвечает минимуму локальной функции Лагранжа L(i):
L(i ) Э (i) A(i ) min;
(2.79)
4) условие (2.79) заменяет собой систему уравнений (2.77) для конкретного узла (i). Но она остаётся верной и при всех других номерах узлов,
то есть имеет общий характер, поскольку номер (i) в выводах формул оставался произвольным. То есть общий вид функций L(i) сохраняется.
Это свойство оказалось весьма полезным. Оно значительно упрощает
построение и отладку расчётной программы. Это же свойство позволяет легко решать нелинейные задачи, когда теряются пропорциональности, например, реакции грунта смещениям.
2.6. Решение методом построения аппроксимирующих функций
Общая система уравнений для всего участка трубопровода с суммарным количеством узлов n имеет 3n уравнений вида (2.77). Число искомых величин также равно 3n (координаты всех n узлов в равновесном состоянии u(i),
v(i), w(i)).
Однако решение данной системы уравнений прямым методом сильно
затруднено, поскольку эти уравнения не выражены явным образом через искомые величины u(i), v(i), w(i). Получить такие явные решения возможно толь-
62
ко при малых деформациях и перемещениях. Поэтому предлагается решения
находить, используя нетрадиционные методы. В числе таких в данном случае
– метод аппроксимации локальных функций Лагранжа в сочетании с методами итераций и последовательных приближений.
Суть метода заключается в том, что по полученным выше формулам
при «временно зафиксированных» положениях всех узлов, кроме одного с
индексом (i), рассчитываются значения L(i), соответствующие трём различным, но близким положениям узла (i). Затем по трём полученным значениям
строится аппроксимирующая функция Lапр(u), находятся её минимум и соответствующее значение umin, которое принимается за следующее приближённое значение искомого параметра.
При аппроксимации используется параболическая зависимость. Это
обосновано тем, что энергия деформации квадратично зависит от напряжений, деформаций и смещений.
Итак, алгоритм минимизации сводится к следующему:
1) используем формулы для локальной функции Лагранжа
L (i ) Э (i) A (i ) ;
A (i) (h q x (i) N x (i) ) u (i) (h q y (i) N y (i) ) v (i) h q z (i) w (i) ;
Э(i ) Э N(i-1) Э N(i)
(2.80)
Э Q(i-2) Э Q(i-1) Э Q(i) Э Q(i1)
Э Ми(i -2) Э Ми(i -1) Э Ми(i) Э Ми(i 1) ;
2) при «фиксированных» текущих значениях всех узлов, кроме (i),
найдём три значения (три «точки» в фазовой плоскости): (u1, L1), (u2, L2),
(u3, L3), как показано на рисунке 2.17. При этом u2 можно принять равным
текущему значению координаты узла (i), значения u1 и u3 – взять сдвинутыми относительно u1 на некоторую малую величину u в одну и другую стороны: u1 u 2 u ;
u 3 u 2 u ;
63
Рисунок 2.17 – Определение минимума локальной функции Лагранжа
методом аппроксимации
3) аппроксимируем локальную функцию Лагранжа полиномом второй
степени (параболой): L a u 2 b u c .
Получаем систему уравнений:
L1 a u1 b u1 c ;
2
L2 a u 2 b u 2 c ;
2
(2.81)
L3 a u 3 b u 3 c ;
2
4) решаем систему относительно коэффициентов а, b, c:
a
a
;
b
b
;
c
c
,
(2.82)
где определители системы уравнений имеют вид [5, 60]:
u1
2
u1 1
u1
L1 u1 1
2
u2
2
u 2 1 ; a L2 u 2 1 ; b u 2
u3
2
u3 1
L3 u 3 1
u3
L1 1
u1
2
u 1 L1
2
L2 1 ; c u 2
2
u 2 L 2 ; (2.83)
2
L3 1
2
u 3 L3
u3
5) минимизируем функцию Лагранжа и находим соответствующее значение umin:
L
0;
u
(a u 2 b u c)
0 ; 2 a u min b 0 ;
u
u min
b
;
2a
u min
b
.
2 a
(2.84)
(2.85)
64
Полученное значение umin является уточнённой координатой узла (i).
Присваиваем координате u(i) узла (i) значение umin .
Аналогично повторяем операции (1 – 5) для координат по другим осям
и также находим значения vmin и wmin и уточняем координаты v(i) и w(i).
Далее переходим к следующему узлу конечно-элементной сетки и так
же уточняем его координаты.
Прохождение всех узлов с уточнением их координат называют «прогонкой». Такие прогонки повторяем многократно, пока не убедимся, что
дальнейших уточнений уже не происходит. Это означает, что положение конечно-элементной сетки стабилизировалось и решение найдено.
Пример минимизации функции рассмотрен в работах [30, 104] и в Приложении 3 .
Выводы по главе 2
1. Показано, что оптимальная для расчёта трубопроводов конечноэлементая сетка представляет собой ряд соединенных друг с другом колец
одинаковой длины h, получаемых делением участка трубопровода плоскостями, перпендикулярными оси. Получены формулы, выражающие зависимость энергии деформаций конечных элементов от действующих сил при
разных схемах нагружения трубопровода.
2. Исследовано влияние кривизны трубопровода на напряженное состояние и энергию деформации конечных элементов. Показано, что при
оценке энергии деформаций с погрешностью не более 5 % можно пренебречь
кривизной по оси 0 в области / D 0,02 и 0 / D 1,5 . При оценке максимальных напряжений и прочности такая же погрешность получается в области 0 / D 6 (D и диаметр и толщина стенки трубы соответственно).
3. Предложены удобные способы математического описания конфигурации трубопровода с учётом распределения кривизны и построения конечно-элементной сетки.
65
4. Получены ключевые для метода конечных элементов формулы, выражающие зависимость энергии деформаций и функции Лагранжа от координат и смещений узлов. Формулы учитывают размеры и кривизну элементов, а также действующие силы.
5. Показано, что в области равновесного состояния функцию Лагранжа
можно заменить полиномами второй степени. Это позволило предложить
упрощённый способ решения системы уравнений, основанный на замене
фактической функции Лагранжа упомянутыми полиномами.
6. Получены условия равновесия конечно-элементной сетки. Рассмотрены особенности решения задачи в подвижной и неподвижной системах
координат.
66
3. РАЗВИТИЕ МЕТОДА КОНЕЧНЫХ РАЗНОСТЕЙ
ПРИМЕНИТЕЛЬНО К ПОДЗЕМНЫМ ТРУБОПРОВОДАМ.
ВЗАИМНОЕ ТЕСТИРОВАНИЕ МКЭ И МКР
Полученные в предыдущей главе выражения и алгоритмы нуждаются в
проверке. Для этого обычно используют тестовые задачи. Но в данном случае точные аналитические решения с учётом исходной кривизны балки найти
не удаётся. Поэтому для проверки используем метод конечных разностей.
Этот метод имеет совершенно другие основы. Поэтому, сравнивая решения,
полученные разными численными методами, можно проверить их правильность.
Как известно, метод конечных элементов основан на минимизации
функции Лагранжа (энергия минус работа сил), метод конечных разностей –
на решении дифференциальных уравнений, выражающих условия равновесия сил.
В предыдущей главе получены все выражения для реализации метода
конечных элементов в общем случае, когда балка (трубопровод) произвольной формы в пространстве и находится под действием произвольных сил (за
исключением кручения). Для реализации метода конечных разностей известны дифференциальные уравнения только для прямой балки и только
для поперечных смещений. Поэтому ниже будем одновременно получать
недостающие дифференциальные уравнения и затем сравнивать с данными,
полученными методом конечных элементов [40, 41, 103]. Таким образом,
эти два метода, основанные на совершенно разных принципах, могут служить друг для друга тестовыми задачами. Совпадение результатов будет
служить основанием для утверждения, что в ходе расчётов не допущены системные ошибки.
Естественно, при исключении кривизны все полученные выражения
должны переходить в известные решения для прямой балки. Поэтому рассмотрим в качестве теста одну из таких задач.
67
3.1.
Уравнение
продольно-поперечного
изгиба
трубопровода
на прямых участках
Если балка прямая, то криволинейная ось s совпадет с осью z, а система (xyz) превращается в неподвижную. При этом кривизна станет нулевой, а
радиус изгиба – бесконечным.
При продольно-поперечном изгибе рассматривают только прогибы
(смещения в перпендикулярном направлении) под действием поперечных Q
и продольных N сил.
Допустим, действуют силы только в одной (пусть вертикальной) плоскости. Тогда из всех компонент энергии (2.59) или (2.63) останутся только
те, которые соответствуют изгибу и растяжению:
Э (i ) Э N(i-1) Э N(i) Э Ми(i-1) Э Ми(i) Э Ми(i1) .
(3.1)
Из уравнений равновесия (2.77) останется только одно:
Э (i )
v (i )
h q y (i ) N y (i ) 0 .
(3.2)
Из выражений (2.57) следует:
v 2vi vi 1
N y (i ) N i i 1
.
h
(3.3)
Энергию по (3.1) представим суммой двух составляющих, которые
определяются осевыми силами N и изгибающими моментами Ми соответственно
Э (i ) Э (i ) ( N) Э (i) (М и ) ,
где
Э (i ) ( N) Э N(i-1) Э N(i) ;
(3.1а)
Э(i) (М и ) Э Ми(i-1) Э Ми(i) Э Ми(i1) .
В соответствии с формулой (2.22) при постоянной силе N первое слагаемое Э (i) (N) const . Поэтому её производная равна нулю.
Второе слагаемое найдем из формул (2.54), (2.61), (2.62)
68
2
2
E J x v (i ) 2 v (i1) v (i2) v i1 2 v (i ) v (i1)
Э (i ) (M) 3
2
2 h v i2 2 v (i1) v (i )
. (3.4)
Дифференцируем (3.1а) по v(i) :
Э (i )
v (i )
E J x v (i ) 2 v (i1) v (i2) 2 v i1 2 v (i ) v (i1)
3
h v i 2 2 v (i1) v (i )
EJ
3x v (i2) v (i 2) 4 v (i1) v (i1) 6 v (i ) .
h
(3.5)
Подставляем выражения (3.3) и (3.5) в (3.2):
E Jx
3 v (i2) v (i 2) 4 v (i1) v (i1) 6 v (i ) h q y (i )
h
v 2v i v i1
N i i1
0.
h
(3.6)
Решаем уравнение (3.6) относительно v(i) :
v (i ) A (v (i1) v (i1) ) B ( v (i2) v (i2) ) C ;
4E Jx N h2
А
;
6E Jx 2 N h2
E Jx
В
;
6E Jx 2 N h2
q h4
.
C
6E Jx 2 N h2
(3.7)
Таким образом, решение задачи о продольно-поперечном изгибе трубопровода сводится к многократному применению формул (3.7) ко всем узлам конечно-элементной сетки.
Чтобы убедиться в правильности этих формул, попробуем использовать известное дифференциальное уравнение продольно-поперечного изгиба
[46]:
E Jх
d4v
d2v
N
(
z
)
q у ( z)
dz4
dz2
(3.8)
и получить конечно-разностное представление с помощью переходов:
d 4 v v (i2) 4v (i1) 6v (i ) 4v (i1) v (i2)
d 2 v v (i1) 2 v (i ) v (i1)
;
. (3.9)
dz4
(z) 4
dz2
(z) 2
Подставляя выражения (3.9) в уравнение (3.8) и решив полученное относительно v(i), получаем следующие выражения:
69
v (i ) A v v (i1) v (i1) Bv v (i2) v (i2) C v ;
4E Jx N h2
Av
;
6E Jx 2 N h2
E Jx
Bv
;
6E Jx 2 N h2
Cv
qy h4
6E Jx 2 Nh2
(3.10)
.
Как видим, выражения (3.7) и (3.10), полученные разными методами, в
точности совпадают друг с другом, если шаг сетки h принять равным приращению линейной координаты z. Это означает, что уравнения равновесия
(3.2) и (3.8) эквивалентны. Отсюда следуют два вывода:
1) математический аппарат МКЭ, развитый в предыдущей главе, для
данного типа задач верен;
2)
широко
известное дифференциальное уравнение продольно-
поперечного изгиба в форме (3.8) учитывает только энергию деформаций от
изгибающего момента и не учитывает энергию поперечного сдвига.
3.2. Уравнение продольно-поперечного изгиба с учётом кривизны
Уравнение (3.8) справедливо для прямой балки, а для кривой балки
аналогичное уравнение не известно. Попытаемся его получить, а затем сравнить условия равновесия в двух численных реализациях: конечно-разностной
и конечно-элементной.
Рассмотрим малый элемент упругой трубы (балки) длиной ds (рисунок
3.1). Элемент имеет начальную кривизну K0 с радиусом кривизны и находится под действием всевозможных сил.
Рассмотрим две оси координат:
криволинейную ось s, направленную по оси трубы;
подвижную декартовую ось z, направленную по касательной к эле-
менту в его середине.
На элемент действуют внешние силы q с перпендикулярной составляющей qv и продольной составляющей qw
параллельны и перпендикулярны оси s).
(в каждой точке силы qw и qv
70
Рисунок 3.1 – Расчётная схема элемента трубопровода
(положения элемента и оси координат соответствуют начальному состоянию,
силы и моменты – деформированному состоянию)
Поскольку элемент мал, то малыми являются и величины ds (дуга), dz
(хорда), d (угол, который опирается на дугу ds). Углы и также малы, так
как их сумма равна малой величине d.
При деформировании элемента его точки получают некоторые смещения. Проекции смещений в поперечном и продольном направлениях (относительно исходного состояния элемента, т.е. оси s) обозначим v и w. Рассматриваем плоскую задачу, когда ось элемента s не выходит из плоскости;
выберем ось х перпендикулярно этой плоскости, поэтому смещения u в
направлении оси х равны нулю.
Распределённые внешние силы, действующие на элемент (вес, реакция
грунта, воды, ветра и т.д.), обозначим q (поперечная и продольная составляющие qv и qw ). Действие «отброшенных» участков балки на данный элемент
слева и справа заменим продольными силами N и N + dN, поперечными силами Q и Q + dQ, изгибающими моментами M и M + dM соответственно.
На рисунке 3.1 силы и моменты показаны с положительными знаками.
Необходимо получить уравнения равновесия элемента, связывающие
смещения v и w точек балки.
71
Запишем три условия равновесия элемента и преобразуем их для получения соответствующих дифференциальных уравнений.
Условие 1. Проекция всех сил на ось z в сумме равна нулю:
Z N сos ( ) (N dN) cos ( ) Q sin ( ) (Q dQ) sin ( ) q
w
ds 0 . (3.11)
Учитывая соотношения бесконечно малых величин и пренебрегая малыми более высоких порядков, получаем из (3.11):
N ( N dN ) Q (Q dQ) q w ds 0 ;
dN Q ( ) q w ds 0 ;
dN Q
dN Q d q w ds 0 ;
ds
q w ds 0 ;
dN Q
qw 0 ;
ds
dN
Q K полн q w 0 .
ds
(3.12)
Здесь использовано известное соотношение между кривизной (K) и
«радиусом кривизны» ():
K 1/ .
Полная кривизна элемента Кполн состоит из исходной кривизны К0 и
кривизны от упругого изгиба Купр : K полн К 0 K упр .
v
d2v
При малых смещениях K упр
v 2 .
[1 (v) 2 ]3 / 2
ds
Так из формулы (3.12) получаем первое уравнение равновесия:
d2v
dN
Q 2 K 0 q w 0 .
ds
ds
(3.13)
Напомним, что здесь
Q – перерезывающая сила;
N – осевая сила;
К0 – начальная кривизна балки в точке s;
qw – компонента внешних сил вдоль оси s;
z – касательная к элементу дуги ds в исходном состоянии (без напряжений);
72
s – криволинейная координата, идущая по оси трубы в исходном (ненапряженном) состоянии;
v – поперечное смещение точек элемента относительно оси s;
w – продольное смещение точек элемента вдоль оси s;
v(s) и w (s) – функции, описывающие состояние элемента с учётом
деформаций.
Условие 2. Проекция всех сил на ось y в сумме равна нулю:
Y N sin( ) (N dN) sin( ) Q cos( ) (Q dQ) cos( ) q ds 0 .
v
(3.14)
Учитывая соотношения малых величин, получаем:
N ( N dN ) Q (Q dQ) q v ds 0 ;
N ( ) dN dQ q v ds 0 ;
N
ds
dQ q v ds 0 ;
dQ N
qv 0 ;
ds
d2v
dQ
N 2 K 0 q v 0 .
ds
ds
(3.15)
Условие 3. Сумма моментов всех действующих сил относительно середины элемента равна нулю:
M M (M dM) Q
ds
ds
(Q dQ) 0 .
2
2
Пренебрегая малыми высших порядков, получаем:
dM
Q 0.
ds
(3.16)
dM Q ds 0 ;
(3.17)
Таким образом, получены искомые уравнения равновесия (3.13), (3.15),
(3.17). Но в них помимо смещений v, w содержатся и другие неизвестные величины: M, Q, N. Исключим некоторые из них, используя для этого некоторые известные положения.
Из выражения изгибающего момента следует:
M
1
;
E J x упр
M d2v
.
E J x ds2
(3.18)
73
Дифференцируем выражение (3.18) по s и используем (3.17), считая
параметры E и J постоянными в пределах элемента (для трубы это условие
выполняется):
1 dM d 3 v
;
E J x ds ds3
d3v
Q
0 .
3
E Jx
ds
Дифференцируем ещё раз по s и используем (3.15):
d4v
1 dQ
0;
ds4 E J x ds
d4v
1 d2v
N
K
q
0.
0
v
ds4 E J x ds2
Отсюда окончательно:
d2v
d4v
E J 4 N 2 K 0 q v 0 .
ds
ds
(3.19)
Полученное уравнение (3.19) на прямых участках переходит в известное выражение (3.8).
Если подставить в (3.19) конечно-разностное представление производных (3.9), затем решить относительно v(i), получим:
v (i ) A (v (i1) v (i1) ) B ( v (i2) v (i2) ) C ;
(q v ) N K 0 ) h 4
4E Jx N h2
E Jx
А
; В
; C
.
6E Jx 2 N h2
6E Jx 2 N h2
6E Jx 2 Nh2
(3.20)
Рассмотрим трубопровод в неподвижной системе координат, где ось z
направлена преимущественно вдоль рассматриваемого участка АВ (рисунок
3.2).
Рисунок 3.2 – Способ выбора неподвижной системы координат
на участке трубопровода АВ (профиль)
74
В качестве одной из осей неподвижной системы координат выбрана
ось z, проходящая через начало и конец участка АВ; оси x и y перпендикулярны оси z; ось x в горизонтальной плоскости; ось y в вертикальной
плоскости.
x(z), у(z) функции, описывающие кривую балку в ненапряженном состоянии;
qx, qz, qy – компоненты внешних сил q, действующих на трубу;
u, v, w – смещения точек при деформировании;
U, V – отклонения точек трубы от оси z;
U x u ; V y v , или
u U x ; v V y.
Общая кривизна складывается из исходной и упругой составляющих:
Кy
V
V y v K 0 K упр .
[1 (V) 2 ]3 / 2
Учитывая это, вместо (3.13) получаем уравнение:
dN
d 2V
Q 2 qz 0 .
dz
dz
(3.13а)
Аналогично получаем:
dQ
d2V
N 2 qy 0 ;
dz
dz
(3.15а)
dM
Q 0;
dz
(3.17а)
M d 2V
K0 ,
E J x dz 2
(3.18а)
где K0 – исходная кривизна в плоскости (yz).
Дифференцируем выражение (3.18а) по z и используем (3.17а):
1 dM d 3 V dK0
;
E J x dz dz3
dz
1
d 3 V dK0
.
Q 3
E Jx
dz
dz
Дифференцируем ещё раз по z и используем (3.15а):
1 dQ d 4 V d 2 K 0
;
E J x dz dz 4
dz 2
75
1
d 2V
d 4V d 2K0
.
(N 2 q y ) 4
E Jx
dz
dz
dz 2
d 4V d 2K 0
d 2V
N 2 qy 0 .
E J x 4
2
dz
dz
dz
(3.19а)
Подставляя в (3.19а) конечно-разностное представление производных,
затем решая относительно V(i), получим:
V(i ) A (V(i1) V(i1) ) B (V(i2) V(i2) ) C ;
А
C
4E Jx N h2
E Jx
В
;
;
6E Jx 2 N h2
6E Jx 2 N h2
h 4 q y (i ) h 2 E J x (K у (i 1) 2K у (i ) K у (i1 )
6E Jx 2 N h2
(3.20а)
.
Итак, выражения (3.20) и (3.20а) получены методом конечных разностей. Попробуем получить аналогичные выражения методом конечных элементов. Для этого воспользуемся условием равновесия (2.77):
Э (i )
v (i )
h q y (i ) N y (i ) 0 .
(3.21)
Энергетическая часть:
Э (i ) Э Ми(i-1) Э Ми(i) Э Ми(i1) ;
v (i1) 2 v (i ) v (i1)
d2v
;
М y E J x 2 E J x
2
ds (i )
h
2
h М и (i )
;
Э Ми(i)
2E
Jx
Э (i )
2
2
E J x v (i ) 2 v (i1) v (i2) v i1 2 v (i ) v (i1)
3
2
2 h v i2 2 v (i1) v (i )
Э (i )
v (i )
EJ
3x v (i2) v (i 2) 4 v (i1) v (i1) 6 v (i ) .
h
;
(3.22)
Силовая часть:
v 2v i v i 1
N y (i ) N i i 1
h K у (i ) .
h
(3.23)
76
Подставляя выражения (3.22) и (3.23) в уравнение (3.21), получаем:
E Jx
3 v(i 2) v(i 2) 4 v(i 1) v(i 1) 6 v(i) hq y (i )
h
v 2 vi vi 1
Ni i 1
hK y (i ) 0.
h
(3.24)
Решая (3.24) относительно v(i), получаем окончательно:
v (i ) A (v (i1) v (i1) ) B ( v (i2) v (i2) ) C ;
(q y ( i ) N K y ( i ) ) h 4
4E Jx N h2
E Jx
А
; В
; C
.
6E Jx 2 N h2
6E Jx 2 N h2
6E Jx 2 N h2
(3.25)
Как видим, выражения (3.20) и (3.25), полученные разными методами,
полностью совпадают (за исключением некоторых обозначений). Следовательно, есть большая вероятность, что они верны.
Проделаем аналогичные операции в неподвижной системе координат:
Э (i )
V(i )
h q y (i ) N y (i ) 0 .
(3.21а)
Энергетическая часть:
2
Э (i ) Э Ми(i-1) Э Ми(i) Э Ми(i1) ;
h М и (i )
;
Э Ми(i)
2E
Jx
d 2V
V(i 1) 2 V(i ) V(i 1)
М y E J x 2 K E J x
K
у (i )
2
;
dz
h
Э (i )
2 2
V 2V
(i )
( i 1) V( i 2 ) K у ( i 1) h
E Jx
2 2
3 Vi 1 2 V(i ) V(i 1) K у (i ) h
;
2h
2
2
Vi 2 2 V(i 1) V(i ) K у (i 1) h
(V(i ) 2 V(i 1) V(i 2) K у (i 1) h 2 )
Э (i ) E J x
2
3 2(V(i 1) 2V(i ) V(i 1) K у (i ) h )
v (i )
h
2
(V(i 2) 2V(i 1) V(i ) K у (i 1) h )
E J x V(i 2) V(i 2) 4 V(i 1) V(i 1) 6 V(i )
3 2
.
h h K у (i 1) 2 K у (i ) K у (i 1)
(3.22а)
77
Силовая часть:
V(i1) 2V(i ) V(i1)
N y (i ) N i
.
h
(3.23а)
Подставляя выражения (3.22а) и (3.23а) в уравнение (3.21а), получаем:
E J x V(i 2) V(i 2) 4 V(i 1) V(i 1) 6 V(i )
3 2
h h K у (i 1) 2 K у (i ) K у (i 1)
V(i 1) 2V(i ) V(i 1)
h q y (i ) N (i )
0 .
h
(3.24а)
Решая (3.24а) относительно V(i), получаем окончательно:
V(i ) A (V(i1) V(i1) ) B (V(i2) V(i2) ) C ;
E Jx
4E Jx N h2
А
; В
;
2
6E Jx 2 N h2
6E Jx 2 N h
C
h 4 q y (i ) h 2 E J x (K у (i 1) 2K у (i ) K у (i1 )
6E Jx 2 N h2
(3.25а)
.
Как видим, выражения (3.20а) и (3.25а), полученные разными методами, полностью совпадают.
Полностью аналогичные выражения получаются и для горизонтальной
плоскости (xz).
Таким образом, разобрались с уравнениями для определения поперечных смещений u(i), v(i) и U(i), V(i) с учётом исходной кривизны участков. Осталось разобраться с уравнениями для продольных сдвигов w(i) и W(i).
3.3. Уравнение продольного сдвига трубопровода
Уравнение продольного сдвига описывает смещение w. Такое смещение происходит в основном под действием продольных внешних сил q w и
осевой силы N. В свою очередь, при продольном сдвиге изменяется и распределение сил N. Поэтому уравнение продольного сдвига должно связывать
величины w, N, qw (рисунок 3.1).
78
Из полученных выше условий равновесия (3.13), (3.15), (3.17) это явление описывает уравнение (3.13). В остальных уравнениях силы q w и смещения w не участвуют, а сила N входит как параметр, влияющий на распределение поперечных сдвигов u и v.
Итак, за основу принимаем уравнение:
d2v
dN
Q 2 K q w 0 .
ds
ds
(3.26)
Далее необходимо исключить параметр Q; для этого есть два пути: использовать либо (3.15), либо (3.17).
Выберем второй вариант как более простой:
dM
Q 0;
ds
Q
dM
.
ds
(3.27)
Далее для наглядности рассмотрим случай, когда изгиб происходит
только в одной плоскости (например вертикальной).
d2v
M Мy E Jx 2 ;
ds
dM
d3v
Q
EJ 3 ;
ds
ds
dN
d3v d 2 v
E J 3 2 K у q w 0 .
ds
ds ds
(3.28)
В данном выражении смещения w «спрятаны» в осевой силе N. Поэтому необходимо выразить N в явном виде через смещения. В общем виде
для этого следует пользоваться подходом, использованным в формулах (2.42)
– (2.47). Но при этом получаются очень сложные выражения, которые невозможно решить аналитически и невозможно перевести в конечно-разностный
вид.
Рассмотрим частный случай, когда на участке нет кривизны. При этом
следует пользоваться выражениями (2.23):
N F E z F 0 ;
0 P
D 3 E Т Т
0
2
(3.29)
и формулой вычисления длины отрезка , концы которого получают смещения dw, dv, du:
79
z lim ds0
z
dw 2 dv2 du2
dw
1
ds
2
2
dw dv du
1
ds ds ds
2
;
dw
;
ds
dw dw
1
dN
d
ds ds
FE
ds
ds dw 2 dv 2 du 2
1 ds ds ds
.
Подставляя полученное в формулу (3.28), получаем искомое уравнение
для определения продольных смещений по заданным другим характеристикам:
dw dw
1
d
ds ds
ds dw 2 dv 2 du 2
1 ds ds ds
J d3v d 2 v
qw
0.
3 2 K у
F
F
E
ds
ds
(3.30)
Как видим, данное уравнение также практически не пригодно для аналитического и конечно-разностного решений.
Рассмотрим более простой случай, когда участок прямой ( К у0 ) и отсутствуют поперечные смещения ( u 0 ; v 0 ). При этих условиях уравнение (3.30) получает следующий простой вид:
d2w qw
0.
ds2 F E
(3.31)
Конечно-разностное представление этого дифференциального уравнения с шагом сетки h имеет вид:
w (i )
h 2 q w (i )
1
.
w (i 1) w (i 1)
2
F E
Рассмотрим эту же картину в неподвижной системе координат.
(3.32)
80
За основу принимаем уравнение (3.13а):
dN
d 2V
Q 2 qz 0 .
dz
dz
(3.26а)
Исключаем параметр Q с помощью уравнения
dM
Q 0,
dz
d2V
M М y E J x 2 K у ;
dz
d 3 V dK у
dN
E J 3
dz
dz
dz
Q
(3.27а)
d 3 V dK у
dM
;
E J х 3
dz
dz
dz
d2V
2 qz 0 .
dz
(3.28а)
Как и в предыдущем случае, зависимость от смещений W заключена в
осевой силе N. Если зависимость N( W ) в общем виде подставить в (3.28а),
то получается сложное для решения уравнение.
Если рассматривать случай прямой трубы без поперечных смещений,
то получим простое уравнение состояния, аналогичное (3.31):
d2W qz
0.
dz2 E F
(3.31а)
Таким образом, дифференциальные уравнения состояния в подвижной
и неподвижной системах координат (3.30) и (3.31а) полностью совпадают,
если учитывать, что в этом случае совпадают s с z, w с W. Конечноразностное представление уравнения (3.31а) имеет такой же вид, что и (3.31):
h 2 q z (i )
1
.
W(i ) W(i1) W(i1)
2
F E
(3.32а)
Сравнить формулы, получаемые методами МКР и МКЭ, можем только
для случая, когда труба прямая и отсутствуют поперечные смещения. Для
других случаев МКР-формулы не получены, но могут быть получены МКЭформулы. В этом одно из преимуществ МКЭ.
При продольном смещении узла (i) изменяются энергии элементов (i-1)
и (i). Их суммарная энергия вычисляется с использованием формулы (2.35):
81
Э N Э N(i-1) Э N(i)
h
2
2
( N (i1) N (i ) ) .
2E F
(3.33)
Осевые силы в элементах (i) и (i-1) найдём по формулам (2.42):
N (i ) F E (i ) 0 ;
Осевые деформации:
(i )
(i )
h
N (i1) F E (i1) 0 .
1;
(i1)
(i1)
h
1.
Длина элементов после деформирования:
(i1) h w (i ) w (i1) .
(i ) h w (i1) w (i ) ;
Условие равновесия узла (i) (2.77), учитывая N 0 по формуле (2.74)
и рисунку 2.16, имеет вид:
Э (i )
w (i )
h q w (i ) 0 .
Частная производная энергии:
N (i1)
N (i )
Э N
h
.
N (i1)
N (i )
w (i ) E F
w (i )
w (i )
(3.34)
Деформации элементов (i) и (i-1)
(i )
h w (i 1) w (i )
h
1
w (i 1) w (i )
h
(i1)
;
w (i ) w (i1)
h
.
Осевые силы в элементах:
w (i 1) w (i )
FE
w (i 1) w (i) F 0 ;
N (i ) F E
0
h
h
N (i1)
FE
w (i) w (i1) F 0 .
h
Производные сил:
N (i )
w (i )
FE
;
h
N (i1)
w (i )
FE
.
h
Производная энергии по (3.34):
Э N F E
w (i) w (i1) F 0 F E w (i1) w (i) F 0
w (i ) h
h
FE
w (i-1) 2 w (i) w (i10 .
h
Условие равновесия окончательно:
82
Э (i )
w (i )
h q w (i ) 0 ;
w (i )
FE
w (i-1) 2 w (i) w (i10 h q w (i) 0 ;
h
h 2 q w (i )
1
.
w (i 1) w (i 1)
2
F E
(3.35)
Сравнение последней формулы с формулами (3.32) и (3.32а) показывает, что они совпадают.
Таким образом, метод конечных разностей и метод конечных элементов привели к одинаковым результатам, что подтверждает их правильность.
3.4. Тестовые задачи и примеры
В качестве одной из задач, имеющих точное аналитическое решение,
выберем упругую балку, находящуюся под действием постоянных сил q и N
(рисунок 3.3).
Рисунок 3.3 Расчетная схема тестовой задачи (пример 1)
Состояние такой балки описывают уравнением продольно-поперечного
изгиба:
E Jx
d 4V
d 2V
N
(
z
)
q.
dz 4
dz 2
(3.36)
Представим его в следующем виде:
d 4V
d 2V
А 2 B;
dz4
dz
A
N
;
E Jx
B
q
.
E Jx
83
Это дифференциальное уравнение четвертого порядка с постоянными
коэффициентами, неоднородное. Его решение ищут в виде суммы общего
решения однородного уравнения (без правой части) и частного решения неоднородного (с правой частью) [5, 60]:
V(z) VО (z) VЧ (z) .
(3.37)
Для определения общего решения однородного уравнения составляют
характеристическое уравнение, которое в данном случае имеет вид:
r4 A r2 0.
(3.38)
r2 r2 A 0 .
Приводим его к виду:
Корни характеристического уравнения следующие:
r1 0 ;
r2 0 ;
r3 А ;
r4 А .
Подставляя выражение параметра А, получаем:
r2 0 ;
r1 0 ;
r3
N
;
E Jx
r4
N
.
E Jx
(3.39)
При растягивающих продольных усилиях (N > 0) все корни действительные. Поэтому общее решение однородного уравнения имеет следующий
вид:
N
N
VО (z) С1 С 2 z С 3 exp
z С 4 exp
z .
E Jx
E Jx
(3.40)
Частное решение неоднородного уравнения ищем в виде полинома и
находим:
VЧ (z)
B 2
q
z
z2 .
2A
2N
(3.41)
Таким образом, общее решение заданного дифференциального уравнения (3.39) будет следующим:
V(z) VО (z) VЧ (z)
С1 С 2 z
N
.
q
N
z 2 С 3 exp
z С 4 exp
z
2N
E JX
E JX
(3.42)
84
Здесь С1, С2, С3, С4 неопределенные действительные коэффициенты, которые зависят от граничных (краевых) условий. Для определения этих
коэффициентов необходимо рассмотреть конкретные примеры.
D 720 мм 0,72 м ;
Пример 1. Диаметр трубы
толщина стенки
10 мм 0,01 м ; модуль упругости E 206 10 3 МПа 2,06 1011 Па ; рас-
стояние между опорами L 100 м . В трубе находится газ под давлением
P 7,0 МПа 7,0 10 6 Па . Удельный вес металла м 7,7 10 4 Н / м ; удель-
ный вес сжатого газа газ 10 3 Н / м . Определить максимальный прогиб в середине.
В процессе решения получены следующие вспомогательные параметры: площадь поперечного сечения трубы (металла) F 0,02231 м 2 ; момент
инерции сечения относительно диаметра J x 0,1406 10 2 м 4 ; вес трубы с
газом
q 0,2102 10 4 Н/м ;
кц 245 МПа ;
осевое
окружное
напряжение
(кольцевое)
z 73,5 МПа ;
напряжение
осевая
сила
N 1,639 10 6 Н .
Некоторые величины, участвующие в формуле (3.42):
q
0,6412 10 3 ;
2N
N
0,7524 10 1 ;
E Jx
N
N
exp
L 0,1852 10 4 ; exp
L 0,5399 10 3 .
E Jx
E Jx
Граничные условия имеют вид:
v(0) 0 ;
v(100) 0 ;
dv
0;
dz z0
dv
0.
dz z 100
(3.43)
Используя формулу (3.42) и граничные условия (3.43), получаем систему уравнений для определения коэффициентов С1, С2, С3, С4.
Расширенная матрица этой системы имеет вид:
85
0.1000E+01
0.0000E+00
0.1000E+01
0.1000E+01
0.0000E+00
0.1000E+01
0.1000E+03
0.1852E+04
0.5399E-03
0.6412E+01
0.0000E+00
0.1000E+01
0.7524E-01
-0.7524E-01
0.0000E+00
0.0000E+00
0.1000E+01
0.1394E+03
-0.4062E-04
0.1282E+00
Решение этой системы приводит к результатам
С1 0,8531; С 2 0,06412 ; С 3 0,4604 10 3 ; С 4 0,8526 .
Таким образом, прогиб данной трубы описывается следующей функцией:
V(z) 0,8531 0,06412 z 0,4604 10 3 exp 0,07524 z С 4 exp 0,07524 z .
По этой функции построена таблица 3.1.
Таблица 3.1 – Сравнение аналитического и численного решений примера 1
Аналитическое решение
z (м)
0.00E+00
0.50E+01
0.10E+02
0.15E+02
0.20E+02
0.25E+02
0.30E+02
0.35E+02
0.40E+02
0.45E+02
0.50E+02
0.55E+02
0.60E+02
0.65E+02
0.70E+02
0.75E+02
0.80E+02
0.85E+02
0.90E+02
0.95E+02
0.10E+03
V (м)
0.0000E+00
0.3744E-01
0.1267E+00
0.2416E+00
0.3642E+00
0.4821E+00
0.5870E+00
0.6732E+00
0.7371E+00
0.7763E+00
0.7895E+00
0.7763E+00
0.7371E+00
0.6732E+00
0.5870E+00
0.4821E+00
0.3642E+00
0.2416E+00
0.1267E+00
0.3744E-01
0.0000E+00
Численное решение
V (м)
0.0000E+00
-0.3705E-01
-0.1255E+00
-0.2396E+00
-0.3615E+00
-0.4790E+00
-0.5837E+00
-0.6701E+00
-0.7345E+00
-0.7745E+00
-0.7889E+00
-0.7746E+00
-0.7346E+00
-0.6702E+00
-0.5837E+00
-0.4790E+00
-0.3615E+00
-0.2396E+00
-0.1255E+00
-0.3705E-01
0.0000E+00
низ (МПа) верх
-0.1828E+09
-0.7785E+08
0.3160E+07
0.5154E+08
0.8763E+08
0.1122E+09
0.1288E+09
0.1398E+09
0.1467E+09
0.1506E+09
0.1519E+09
0.1506E+09
0.1468E+09
0.1399E+09
0.1289E+09
0.1122E+09
0.8663E+08
0.5154E+08
-0.3160E+07
-0.7785E+08
-0.1828E+09
0.3298E+09
0.2249E+09
0.1481E+09
0.9545E+08
0.5937E+08
0.3476E+08
0.1814E+08
0.7147E+07
-0.4100E+05
-0.3618E+07
-0.4922E+07
-0.3618E+07
-0.4073E+05
0.7148E+07
0.1815E+08
0.3477E+08
0.5937E+08
0.9546E+08
0.1481E+09
0.2249E+09
0.3298E+09
86
Для сравнения в правой части таблицы приведено решение, полученное численно (методами конечных элементов и конечных разностей, которые
в данной задаче абсолютно идентичны). Также показано распределение
напряжений по нижней и верхней образующим трубы ( низ , верх ). Из сравнения решений следует, что результаты по прогибу практически полностью
совпадают. Максимальные напряжения возникают в граничном сечении на
верхней образующей; минимальные напряжения на нижней образующей.
В следующей таблице 3.2 показано влияние рабочего давления и температурных условий на напряженно-деформированное состояние этой же
трубы с теми же весовыми характеристиками трубы и продукта.
Таблица 3.2 – Зависимость параметров напряженно-деформированного
состояния в примере 1 от давления и температуры
Р, МПа
Т, град
N, МН
Vmax, м
max, МПа min, МПа
0
0
0
1,885
+ 441,6
441,6
1,0
0
0,2342
1,572
+ 401,4
380,4
3,0
0
0,7026
1,179
+ 357,2
294,2
5,0
0
1,171
0,945
+ 337,4
232,4
7,0
0
1,639
0,789
+ 329,8
182,8
7,0
+20
0,5367
1,293
+ 369,1
321,0
7,0
+10
1,088
0,979
+ 339,8
242,2
7,0
0
1,639
0,789
+ 329,8
182,8
7,0
10
2,191
0,662
+ 329,9
133,5
7,0
20
2,742
0,570
+ 336,1
90,19
Графическое изображение напряженно-деформированного состояния
некоторых из случаев показано на рисунке 3.4. Решения получены аналитически и численно (они совпадают).
87
Рисунок 3.4 – Напряженно-деформированное состояние трубопровода
при разных давлениях и температурах (по примеру 1)
88
Пример 2. Участок трубопровода АВ с некоторой исходной кривизной закреплен на концах А и В и находится под собственным весом (рисунок
3.5). Определить напряженно-деформированное состояние при различных
давлениях и температурах.
Решение строим в подвижной системе координат (sy), затем для сравнения по программе решения примера 1, затем по стандартной программе
Ansys [14, 15]. Совпадение результатов будет свидетельствовать об их правильности.
Рисунок 3.5 Расчетная схема тестовой задачи (пример 2)
Решение методом конечных элементов строим в подвижной системе
координат (sy). Смещения по направлениям s, у обозначим w, v соответственно (рисунок 3.5). В исходном (ненапряженном) состоянии смещения отсутствуют: v 0 0 ; w 0 0 ; кривизна постоянна и равна K 1/ ;
радиус
кривизны .
Трубопровод находится под дейсьвтем собственного веса q, включая
вес продукта, а также внутреннего давления Р. Температурный режим определяется начальной температурой Т0 , при которой трубопровод был закреплён в таком состоянии, и температурой эксплуатации ТЭ .
Состоянию равновесия отвечает минимум функции Лагранжа L(i) на
всех узлах конечно-элементной сетки, чему соответствует группа формул:
89
L (i ) Э(i) A (i ) min ;
L (i ) Э (i) A (i ) 0 ;
Э(i ) Э N(i-1) Э N(i) Э М(i-1) Э М(i) Э М(i1) ;
A (i ) (h q y (i ) N y (i ) ) v (i ) h q s (i ) w (i ) ;
(3.44)
i 1, 2, 3, ..., n .
Силы qу , qs определяются весом и зависят от координаты s и угла
следующим образом:
q у q сos ;
q s q sin ;
s / ,
(3.45)
где q – вес 1 погонного метра трубы с продуктом.
Компоненты расчётных формул (3.44) определяются по ранее полученным выражениям:
v 2v i v i1
N y (i ) N i i1
h K (i ) ;
h
2
Э N(i)
h N (i )
;
2E
F
2
h М (i )
;
Э Ми(i)
2E J x
v (i1) 2 v (i ) v (i1)
;
М (i) E J x
2
h
N (i ) E F
(i ) h
h
PF
(3.46)
D 3 E F Т Т ;
0
2
(i ) ( v (i1) v (i ) ) 2 (h w (i1) w (i ) ) 2 .
При численном решении задачи используем методы итераций и последовательных приближений. Суть методов состоит в том, что общее равновесие всего участка трубопровода заменяется локальными равновесиями каждого узла в своем локальном окружении. Многократно применяя условия локального равновесия последовательно ко всем узлам, можно приближаться к
общему равновесному состоянию. Если в ходе решения достигается состояние, когда последующее приближение не отличается от предыдущего, считается решение полученным, смещения всех узлов найденными, и далее опре-
90
деляются необходимые компоненты деформаций и напряжений. Алгоритм
такого решения отличается простотой и надёжностью, позволяет учитывать
любые сложные законы взаимодействия трубопровода с грунтом и опорами.
Для определенности рассмотрим трубу со следующими характеристиками: диаметр 820 мм; толщина стенки 12 мм; расстояние L AB 100 м . Радиус кривизны , внутреннее давление P, перепад температуры Т Т Э Т 0
варьируются.
В
трубе
сжатый
газ
с
некоторым
удельным
весом
газ 0,1 10 4 Н / м 3 .
На рисунке 3.6 показаны графики распределения смещений и продольных напряжений при радиусе кривизны 300 м , рабочем давлении
Р 7,0 МПа , без перепада температуры Т 0 .
Рисунок 3.6 Распределение смещений v, w и продольных напряжений
вдоль верхней и нижней образующих участка
трубопровода с постоянной исходной кривизной
( 300 м ) под действием собственного веса (пример 2)
Динамика характеристик НДС при изменении давления и температуры
показана на рисунке 3.7 и в таблице 3.3.
Влияние радиуса кривизны на НДС при постоянных других условиях
показано на рисунке 3.8.
91
Таблица 3.3 Параметры НДС трубопровода, 300 м (пример 2)
Т, С
20
0
+ 20
0
+ 10
Р, МПа
7,0
7,0
7,0
0
0
VС, м
+ 0,274
+ 0,142
+ 0,013
0,036
0,099
верх
А , МПа
57,78
22,90
+ 10,33
+ 22,80
+ 38,57
низ
А , МПа
+ 93,90
+ 55,07
+ 18,28
+ 4,52
12,84
верх
, МПа
С
+ 51,27
+ 33,22
+ 15,55
+ 8,80
+ 0,167
низ
С , МПа
15,50
1,417
+ 12,68
+ 18,14
+ 25,18
Рисунок 3.7 – Динамика продольных напряжений при изменениях
давления и температуры
92
Рисунок 3.8 – Динамика смещений и продольных напряжений
при изменениях кривизны участка ( Т 0 ; Р 7,0 МПа )
Анализируя эти результаты, можно видеть, что в отличие от прямых
балок при наличии кривизны изгибающий момент может менять знак
(направление изгиба) в зависимости от соотношения температуры и давле-
93
ния. На кривых участках за счёт появления свободы продольных перемещений снижаются напряжения. На этом явлении, в частности, основана работа
компенсаторов.
При увеличении радиуса кривизны ( ) результаты расчётов всё в
большей степени совпадают с теми, которые были получены в примере 1.
Это несмотря на то, что в примере 1 применялся метод конечных разностей,
в примере 2 – метод конечных элементов.
Решение примера 2 с помощью программы Ansys
Расчётную схему выберем по рисунку 3.5. Исходные данные:
размеры трубы 820 12 мм; длина дуги AB = 314 м;
радиус кривизны 150 м ; на концах А и В заделка;
вес определяется только самой трубой (веса продукта нет);
давление 6,0 МПа; температура + 20 С и 20 С.
Решения получены по двум программам: с использованием формул
(3.44) (3.46), и стандартной программы Ansys. В таблице 3.4 приведены некоторые контрольные результаты.
Таблица 3.4 –Сравнение решений по разным программам (пример 2)
Условие
Параметр
1
2
Смещение точки С
Р = 6,0 МПа
Т = + 20 С
Р = 6,0 МПа
Т = 20 С
Программа на базе
Программа
формул (3.44) (3.46)
Ansys
3
4
v c (min) = 0,645 м
Продольное напряже- z ( низ) = + 42,00 МПа
0,650 м
+ 42,60 МПа
ние в среднем сечении
z ( верх) = 31,51 МПа 31,59 МПа
Смещение точки С
v c (min) = 0,517 м
Продольное напряже- z ( низ) = + 40,60 МПа
ние в среднем сечении
0,520 м
+ 40,70 МПа
z ( верх) = 30,00 МПа 30,55 МПа
94
Окончание таблицы 3.4
1
2
3
v c (min) = 0,722 м
Р = 0 МПа
Смещение точки С
Т = + 20 С
Продольное напряже- z ( низ) = + 43,80 МПа
4
0,726 м
+ 43,85 МПа
ние в среднем сечении
z ( верх) = 33,18 МПа 33,28 МПа
Р = 0 МПа
Смещение точки С
v c (min) = 0,593 м
Т = 20С
Продольное напряже- z ( низ) = + 41,45 МПа
ние в среднем сечении
0,597 м
+ 41,56 МПа
z ( верх) = 30,88 МПа 30,92 МПа
Таким образом, можем отметить, что решения, полученные разными
методами, практически совпадают.
Также можем отметить, что программы, основанные на решении дифференциальных уравнений методом конечных разностей, приводят к решению значительно быстрее, чем другие. При этом использование метода итераций значительно упрощает тексты программ и их отладку, а использование
метода последовательных приближений позволяет учитывать любые сложные законы взаимодействия трубопровода с грунтом, что придаёт большую
гибкость расчётным программам.
Выводы по главе 3
1. Получена система дифференциальных уравнений равновесия трубопровода в общем виде с учётом кривизны. Система включает два уравнения
продольно-поперечного изгиба во взаимно-перпендикулярных плоскостях и
одно уравнение продольного сдвига под действием произвольных сил.
2. Получены конечно-разностные формы представления дифференциальных уравнений равновесия в поперечном и продольном направлениях, которые полностью совпадают с конечно-элементными уравнениями при равенстве шагов сеток.
95
3. Решение ряда тестовых задач показало совпадение результатов, полученных разными методами. В процессе решения тестовых задач установлены некоторые ранее неизвестные закономерности влияния кривизны на
напряженно-деформированное состояние.
4. Установлено, что при наличии кривизны метод конечных разностей
эффективнее метода конечных элементов. При этом использование метода
итераций значительно упрощает составление программы и отладку, а использование метода последовательных приближений позволяет учитывать любые
сложные законы взаимодействия трубопровода с грунтом, что придаёт большую гибкость расчётным программам.
96
4. РЕШЕНИЕ ПРАКТИЧЕСКИХ ЗАДАЧ
ДЛЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ
4.1. Выбор системы координат
Магистральные трубопроводы преимущественно направлены по прямой и повторяют рельеф местности по высотному положению. Могут быть
небольшие участки с изгибом в горизонтальной плоскости, которые появляются в местах изменения направления. Поэтому, учитывая некоторые преимущества метода конечных разностей (см. вывод по предыдущей главе),
удобно применение неподвижной системы координат (рисунок 3.2).
При этом ось z следует направлять так, чтобы она проходила через начальную и конечную точки рассматриваемого участка АВ. Оси х и у направляются перпендикулярно z в горизонтальной и вертикальной плоскостях соответственно.
Положение системы координат (xyz), привязанной к участку трубопровода АВ, в глобальной системе координат (XYZ) схематически показано на
рисунке 4.1. . Координата у в привязанной системе и Z в глобальной системе
имеют смысл высотной отметки трубы.
Рисунок 4.1 – Неподвижная система координат xyz, привязанная
к участку АВ магистрального трубопровода (вид сверху)
97
Для перехода от глобальной системы (ХYZ) к местной неподвижной
системе (хуz), связанной с рассматриваемым участком АВ, достаточно задаться координатами точек А и В. По этим значениям можем найти угол и
координаты всех точек в местной системе координат. Для этого необходимо
выполнить следующие операции:
1) определить из проектных данных или из данных внутритрубной диагностики координаты точек А и В в абсолютной системе координат (XY):
A (XA, YA); B (XB, YB);
2) выбрать параллельную вспомогательную систему координат (X’Y’) с
началом в точке А; определить координаты точек А и В в этой системе:
X 'A 0 ; Y 'A 0 ; X'B X B X A ; Y'B YB YA ;
3) выбрать локальную для участка АВ систему координат (хуz) так,
чтобы ось (z) проходила через точки А и В; ось х горизонтально; ось у
вертикально. Определить угол между осями Х’ и z:
Y'
Y YA
;
arctg B arctg B
X
'
X
X
B
B
A
(4.1)
4) получить общие формулы перехода от глобальной системы (ХYZ) к
местной (xyz):
z (X XA ) cos( ) (Y YA ) sin( ) ;
х (X XA ) sin( ) (Y YA ) cos( ) ;
(4.2)
у Z ZA ;
5) после того, как выполнены расчёты НДС, появляется необходимость
перейти обратно к абсолютной системе координат с тем, чтобы указать перенапряженные места трубопровода на местности. Для этого необходимо перейти от координат (хyz) к координатам (XYZ) по следующим формулам:
X X A z cos( ) х sin( ) ;
Y YA z sin( ) х cos( ) ;
Z ZA у .
(4.3
)
98
В отчётах по ВТД глобальная координата Z обозначается Н (высотная
отметка). В расчётных формулах МКЭ и МКР отклонения точек трубопровода от оси z в направлениях х, у соответственно обозначаются u, v. С учётом
этих обозначений перепишем формулы (4.2) и (4.3)
z (X XA ) сos( ) (Y YA ) sin( ) ;
u (X XA ) sin( ) (Y YA ) cos( ) ;
(4.2а)
v Н НA .
X X A z cos( ) u sin( ) ;
Y YA z sin( ) u cos( ) ;
(4.3а)
H HA v .
Таким образом, по известным координатам точек трубопровода в глобальной системе координат, найденным в результате внутритрубного и
внешнего обследований трубопроводов, по формулам (4.2а) и (4.3а) можно
найти координаты в местной системе координат (хуz). Тогда решение задачи
о НДС будет сводиться к тому, чтобы «пропустить» трубопровод через определённые точки, учитывая при этом все действующие силы и удовлетворяя
всем условиям и уравнениям, полученным в предыдущих главах. Но для этого необходимо в первую очередь подготовить исходные данные.
4.2. Подготовка исходных данных
Исходные данные целесообразно разделить на две группы.
В первую группу следует отнести данные, общие для всего трубопровода: диаметр, проектное давление, плотности металла, продукта перекачки,
изоляции, грунта.
Во вторую группу следует включить те характеристики, которые зависят от местоположения вдоль трубопровода. К ним относятся координаты
характерных точек на трубопроводе, толщина стенки, которая может быть
разной на разных участках, глубина заложения трубопровода, обводнённость, характеристики арматуры, опор, балластов, кривизна трубопровода и
99
другие особенности. В эту же группу могут войти проходные значения давлений и местной температуры, механические и теплофизические свойства
грунта и изоляции.
Распределение исходных параметров вдоль трубопровода выражается
через километры, пикеты, дистанции. С внедрением внутритрубной диагностики трубопровод был разбит на секции, ограниченные сварными стыками.
Все секции пронумерованы и найдены их координаты (начала и конца). Поэтому расположение точки можно задать и через номер секции. Поэтому при
подготовке исходных данных удобно пользоваться дистанциями и номерами
секций.
Основными источниками исходной информации для проведения расчётов являются проектная и исполнительная документация, отчеты ВТД, отчёты по результатам внешних приборных обследований.
1. Координаты точек трубопровода, включая начальную, конечную и
промежуточные точки. Эта информация содержится в отчётах по ВТД.
Фрагмент такого отчёта показан в таблице 4.1, где также указаны длина и
толщина стенки всех секций, координаты в глобальной системе.
Таблица 4.1 – Фрагмент отчёта ВТД по координатам трубопровода
Координаты в системе
Условная
Средняя ВысотДистанция
Длина
ное поСК1963 W4, м
Номер дистанция
толщина
ложение
по трассе,
секции,
секции начала
стенки,
высота
на местм
м
секции
мм ности, м север (Y) восток (Х)
(H)
27383,86
27383,86
27387,91
27391,57
27391,80
27392,60
27392,84
27393,73
27397,40
27400,00
27401,86
27402,74
27403,39
27403,66
27405,20
27405,45
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
-2,254
-0,282
3,82
7,50
7,75
8,44
8,70
9,56
13,27
15,85
17,65
18,54
19,14
19,40
20,86
21,12
1,972
4,102
3,68
0,25
0,69
0,26
0,86
3,71
2,58
1,80
0,89
0,60
0,26
1,46
0,26
10,79
27,9
13,9
17,9
16,2
20,7
16,4
14,0
21,2
14,0
14,0
13,7
14,0
20,6
29,9
20,6
14,3
53,84
53,84
53,43
52,17
52,02
51,57
51,51
51,01
49,87
49,63
49,46
49,38
49,31
49,29
49,17
49,15
624395,74
624394,42
624391,61
624388,94
624388,78
624388,32
624388,10
624387,57
624384,84
624382,88
624381,53
624380,86
624380,40
624380,18
624379,14
624378,95
248192,86
248192,10
248190,56
248189,23
248189,14
248188,90
248188,80
248188,52
248187,14
248186,14
248185,44
248185,09
248184,85
248184,74
248184,20
248184,11
51,75
51,82
51,92
51,14
51,04
50,73
50,58
50,21
49,42
49,50
49,53
49,52
49,53
49,53
49,52
49,52
100
2. Кривизна секций в горизонтальной и вертикальной плоскостях, которая определяется по характеристикам, найденным при ВТД. В таблице 4.2
в качестве примера приведены данные ВТД и расчётные значения кривизны в
выбранной нами системе координат (хуz). При этом учитывалось, что угол
поворота оси трубы и направление поворота отсчитываются в соответствии с рисунком 4.2.
а)
б)
Рисунок 4.2 – Отсчёт угла поворота оси трубы в горизонтальной (а)
и вертикальной (б) плоскостях
При определении кривизны участков обратили внимание на то, что не
соблюдается базовое соотношение между радиусом кривизны , углом поворота и длиной секции L(C1C2 ) . Если секцию представить как дугу окружности, то должно соблюдаться условие L / . Данные ВТД по радиусу
кривизны значительно меньше. Причина такого результата в том, что обычно
только часть секции имеет кривизну. Поэтому в расчётную формулу L /
следует подставлять только длину искривлённой части секции, которая фактически не известна. Поэтому при расчётах НДС трубопровода будем поль-
101
зоваться эффективным радиусом кривизны эф L / . Тогда эффективная
кривизна должна определяться по следующим формулам:
К 1/ эф / L ;
K x K sin( ) ;
K у K cos( ) .
(4.4)
В последних трёх столбцах таблицы 4.2 приведены рассчитанные по
формулам (4.4) значения эффективного радиуса кривизны и значения кривизны в горизонтальной и вертикальной плоскостях.
Таблица 4.2 – Характеристики кривых секций на участке трубопровода
Данные ВТД
угол
тол№ секдлина пово- радиус
щина
ции
секции рота поворостенки,
L, м
,
та , м
мм
град
1160
12,1
11,46
1
80,0
1280
12,1
11,01
1
96,0
1310
11,9
10,79
2
48,0
1420
12,4
11,42
1
64,0
1440
12,1
11,54
3
98,0
1450
12,1
11,50
3
73,0
1560
11,9
11,38
1
67,0
1590
11,9
11,43
3
65,0
2650
12,1
11,55
8
32,0
2660
11,9
11,56
8
35,0
2720
13,9
11,48
8
27,0
2750
14,0
10,98
1
42,0
2770
11,9
11,51
7
33,0
2790
12,2
11,56
6
40,0
2910
12,2
11,58
7
33,0
3300
12,2
11,47
10
23,0
3310
12,1
11,50
9
25,0
3320
11,9
11,51
10
24,0
3330
11,9
11,44
8
24,0
5290
11,9
11,29
3
44,0
5390
12,1
11,43
7
25,0
5410
11,9
11,55
10
21,0
5430
12,1
11,85
7
29,0
5460
12,2
11,44
9
29,0
6920
11,9
11,46
6
31,0
6930
11,8
11,02
5
42,0
8560
12,1
11,47
4
50,0
8630
11,9
11,12
3
51,0
11000
11,8
11,49
1
95,0
11670
11,9
11,23
1
63,0
Расчётные данные
направление
изгиба
, град
радиус
кривизны
эфф., м
кривизна
Кх, 1/м
кривизна
Ку, 1/м
274
184
274
308
10
10
177
145
280
282
130
338
338
188
68
100
100
128
36
79
186
6
304
216
8
66
70
280
14
12
656,6
630,8
309,1
654,3
220,4
219,6
652,0
218,3
82,7
82,8
82,2
629,1
94,2
110,4
94,8
65,7
73,2
65,9
81,9
215,6
93,6
66,2
97,0
72,8
109,4
126,3
164,3
212,4
658,3
643,4
- 0,00152
- 0,00011
- 0,00323
- 0,00120
0,00079
0,00079
0,00008
0,00263
- 0,01191
- 0,01181
0,00932
- 0,00060
- 0,00398
- 0,00126
0,00978
0,01499
0,01345
0,01195
0,00717
0,00455
-0,00112
0,00158
- 0,00855
- 0,00807
0,00127
0,00723
0,00572
-0,00464
0,00037
0,00032
0,00011
- 0,00158
0,00023
0,00094
0,00447
0,00448
- 0,00153
- 0,00375
0,00210
0,00251
- 0,00782
0,00147
0,00984
- 0,00897
0,00395
- 0,00264
- 0,00237
- 0,00934
0,00987
0,00088
-0,01063
0,01503
0,00577
- 0,01111
0,00905
0,00322
0,00208
0,00082
0,00147
0,00152
102
3. Опоры, арматура, балластировка. Эти конструктивные элементы
создают определенные ограничения возможным смещениям трубопровода.
Поэтому они играют роль дополнительных граничных условий. Местоположения этих элементов и их характеристики определяются из проектной и исполнительной документации, уточняются при обследовании трубопроводов.
Исходную информацию по данным конструктивным элементам предлагается
оформить в виде таблиц 4.3 – 4.5.
Таблица 4.3 – Арматура (задвижки, краны, камеры, …)
№ секции
Дистанция, Sарм
Вид арматуры, её характеристики
Таблица 4.4 – Опоры на надземных участках
№ секции
Дистанция, Sопор
Вид опоры: подвижная,
неподвижная
Высотная отметка Н, м
Таблица 4.5 – Балластировка на обводнённых участках
Дистанция
начало
конец
Вид пригрузов
Балластирующая
способность, кгс/м
4. Свойства грунтов. Эти данные определяются из разных источников:
проектно-изыскательских документов, отчётов по специальным обследованиям, включая внутритрубную диагностику. Рекомендуемая форма подготовки этих данных показана в таблице 4.6. Каждый тип грунта характеризуется механическими свойствами. В разработанной нами расчётной модели
используются коэффициент постели грунта и предельное сопротивление деформации (аналогично модулю упругости и пределу текучести).
103
Таблица 4.6 – Свойства грунтов
Дистанции
(начало-конец)
Тип грунта
Глубина по верхней
образующей, м
Обводнённость
(река, болото, …)
5. Категории участков и марки сталей. Эти сведения необходимы для
оценки уровня опасности напряжений. Они определяются из проекта и исполнительной документации. Рекомендуемая форма подготовки данных показана в таблице 4.7.
Таблица 4.7 – Категории участков и марки сталей
Дистанции
(начало-конец)
Надземный,
подземный
Категория
Марка
стали
Примечание
(ТУ)
6. Рабочее давление и температура в трубопроводе. В зависимости от
режима работы трубопровода и времени года могут быть разными проходное
давление и температура. Эти характеристики могут быть найдены теплогидравлическим расчётом или интерполяцией. Во втором случае для начала и
конца участков должны быть заданы соответствующие значения РА, РВ, ТА,
ТВ. В промежуточных точках значения Р и Т можно определить интерполированием с учётом высотных отметок.
Таким образом, после задания всех вышеуказанных характеристик
можно приступать к выполнению расчётов НДС на выбранном участке.
4.3. Алгоритм расчёта НДС
Численное решение задач о напряженно-деформированном состоянии
сводится к тому, чтобы найти равновесное состояние конечно-элементной
или конечно-разностной математической модели трубопровода с учётом кон-
104
структивных особенностей, действующих сил и ограничений. При этом
должны быть определены смещения всех узлов сетки U(i),
V(i),
W(i);
I = 1, 2, 3, …, n. Эти величины определяются решением системы уравнений
типа (3.20а) и (3.32а):
U (i ) A (U (i1) U (i1) ) B (U (i2) U (i2) ) C x ;
V(i ) A (V(i1) V(i1) ) B (V(i2) V(i2) ) C y ;
(4.5)
h q z (i )
1
,
W(i1) W(i1)
2
F E
2
W(i )
где коэффициенты соответствуют следующим выражениям:
А
Cx
C
4E Jx N h2
E Jx
В
;
;
6E Jx 2 N h2
6E Jx 2 N h2
h 4 q x (i ) h 2 E J y (K x (i1) 2K x (i ) K x (i1 )
6E Jy 2 Nh2
h 4 q y (i ) h 2 E J x (K у (i 1) 2K у (i ) K у (i1 )
6E Jx 2 N h2
:
(4.6)
.
При численном решении задачи используются следующие два метода:
метод последовательных приближений, который позволяет в процессе решения одновременно уточнять и корректировать действующие силы,
которые сложным образом зависят от искомых величин – смещений U(i), V(i),
W(i) . Не зная эти величины, невозможно задать некоторые исходные данные,
в частности, реакции опор и грунта;
метод итераций, суть которого состоит в том, что общее равновесие всего участка трубопровода заменяется локальными равновесиями каждого узла в своем локальном окружении. Многократно применяя условия локального равновесия последовательно ко всем узлам, можно приближаться к
общему равновесному состоянию.
Таким образом, алгоритм численного решения включает:
1) приближенное определение действующих сил исходя из начальных
и граничных условий;
105
2) определение локальных равновесных положений всех узлов по известным по предыдущему пункту действующим силам. Полученное состояние представляет собой некоторое приближение к решению;
3) уточнение действующих сил исходя из приближенного решения.
Возврат к пункту 2) и получение более точного приближения к искомому
решению;
4) контроль хода решения и управление циклами 2), 3).
Если в ходе решения достигается состояние, когда последующее приближение не отличается от предыдущего, решение считается полученным.
Далее по найденным смещениям узлов определяются необходимые компоненты деформаций и напряжений.
Алгоритм такого решения отличается простотой и надёжностью, позволяет учитывать любые сложные законы взаимодействия трубопровода с
грунтом, опорами, балластирующими элементами, арматурой, учитывать
действие воды в вертикальном и горизонтальном направлениях и др.
4.4. Структура расчётной программы
Расчётная программа составлена на алгоритмическом языке Fortran и
переведена на язык Pascal. Состоит из основной части и нескольких подпрограмм. Основная часть выполняет следующие функции:
формирование рабочих массивов;
ввод и контроль исходных данных;
формирование конечно-элементной сетки;
подготовка начальных и граничных условий;
вычисление вспомогательных параметров;
управление циклами, выполняющими итерации и последовательные
приближения;
слежение за процессом счёта путём вывода на печать контрольных
параметров;
проверка выполнения заданных условий по точности;
106
вычисление показателей напряженно-деформированного состояния;
вывод на печать полученных результатов с шагом, равным шагу ко-
нечного элемента (1 м);
вывод на печать контрольных показателей НДС участка трубопро-
вода.
Подпрограмма QQQ уточняет реакцию грунта в зависимости от смещений трубопровода в горизонтальном и вертикальном направлениях.
Подпрограмма UV вычисляет смещения всех узлов исходя из условий
равновесия и заданных конструктивных ограничений на участке трубопровода.
Текст программы на языке Fortran приводится в Приложении 4.
4.5. Пример расчёта НДС
Исходные данные для выполнения расчётов формируются в виде двух
блоков.
Первый блок включает общие характеристики и состоит из 4-х строк:
1) дистанции начала и конца рассматриваемого участка трубопровода;
2) диаметр труб, модуль упругости металла, коэффициент линейного
теплового расширения, предел текучести, температуры строительства и эксплуатации, рабочее давление;
3) минимальное и максимальное число прогонок, требуемая погрешность
(точность) расчётов, погрешности измерения координат контрольных точек по
трассе, коэффициент постели грунта, шаг конечно-элементной сетки;
4) начало и конец размытого участка (где под трубой нет грунта).
Второй блок представляет собой таблицу, включающую характеристики контрольных точек трубопровода. Блок включает номер точки M; координаты в глобальной системе координат ХK, YK, HK; толщину стенки труб в
данной точке DT; кривизну труб в горизонтальной и вертикальной плоскостях CRXK, CRYK. Количество контрольных точек может быть любым.
Отметим, что в данном параграфе обозначения выбраны исходя из особенностей языка Fortran и могут отличаться от принятых выше обозначений.
107
Ниже показан пример подготовки исходных данных для участка подземного трубопровода. Размерности всех величин соответствуют системе
СИ.
Блок 1 имеет вид:
0.
0.820
50
222
50000.
206.E9
1000
222
0.000012
1.E-8
450.E6
0.1
+0.
0.1
50.
3.E5
5.0E6
1.0
Блок 2 имеет вид:
M
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
XK
7296070.81
7296076.21
7296081.51
7296086.80
7296092.16
7296097.49
7296102.81
7296108.25
7296113.41
7296118.45
7296123.64
7296128.79
7296134.01
7296139.24
7296144.56
7296149.88
7296155.18
7296160.44
7296165.69
7296170.95
7296176.41
7296181.67
7296186.89
7296192.10
7296197.22
7296202.51
7296207.88
7296213.24
7296218.57
7296223.85
7296228.99
7296234.26
7296239.56
7296244.89
7296250.20
7296255.52
7296260.87
7296266.13
7296271.31
7296276.50
7296281.64
7296286.86
YK
4663854.42
4663864.79
4663875.09
4663885.28
4663895.61
4663905.98
4663916.25
4663926.66
4663936.60
4663946.74
4663957.07
4663967.39
4663977.71
4663987.97
4663998.12
4664008.38
4664018.63
4664028.86
4664039.06
4664049.25
4664059.78
4664069.88
4664080.16
4664090.43
4664100.62
4664110.99
4664121.38
4664131.77
4664142.11
4664152.44
4664162.46
4664172.71
4664182.96
4664193.25
4664203.49
4664213.72
4664223.92
4664234.10
4664244.42
4664254.73
4664265.01
4664275.29
HK
28.19
28.04
28.15
28.19
28.15
28.47
28.72
28.80
28.80
28.97
29.05
29.03
29.09
28.98
28.85
28.96
28.89
28.80
28.73
28.74
28.79
28.86
28.78
28.44
28.68
29.01
29.00
28.94
29.04
29.13
29.01
28.80
28.70
28.60
28.50
28.48
28.54
28.52
28.26
27.92
27.51
27.01
DTK
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
CRXK
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.004571
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
CRYK
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000971
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
108
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
7296292.14
7296297.36
7296302.63
7296307.98
7296313.33
7296318.55
7296323.72
7296328.78
7296333.89
7296339.09
7296344.31
7296349.65
7296354.88
7296360.21
7296365.56
7296370.69
7296375.92
7296381.19
7296386.50
7296391.81
7296397.28
7296402.75
7296407.82
7296412.99
7296418.26
7296423.56
7296428.95
7296434.28
7296439.53
7296444.94
7296450.35
7296450.73
7296454.94
7296460.33
7296465.73
7296471.00
7296476.28
7296481.61
7296486.96
7296492.35
7296497.87
7296503.40
7296508.88
7296514.35
7296519.70
7296525.13
7296530.53
7296535.86
7296541.33
7296546.64
7296551.97
7296557.36
7296562.81
7296568.14
7296573.37
4664285.61
4664295.98
4664306.25
4664316.54
4664326.92
4664337.08
4664347.37
4664357.43
4664367.64
4664377.93
4664388.26
4664398.53
4664408.84
4664419.08
4664429.38
4664439.48
4664449.77
4664459.98
4664470.26
4664480.54
4664491.00
4664501.44
4664511.50
4664521.72
4664532.17
4664542.60
4664553.04
4664563.46
4664573.89
4664584.18
4664594.34
4664595.04
4664603.14
4664613.41
4664623.72
4664634.00
4664644.28
4664654.61
4664665.06
4664675.43
4664685.90
4664696.34
4664706.64
4664717.07
4664727.50
4664737.95
4664748.35
4664758.55
4664768.97
4664779.14
4664789.51
4664799.83
4664810.19
4664820.51
4664830.97
26.53
25.97
25.32
24.65
24.00
23.68
23.35
23.21
23.15
23.21
23.26
23.35
23.53
23.67
23.72
23.61
23.36
23.17
23.10
23.14
23.18
23.17
23.15
23.21
23.60
24.40
24.89
25.41
26.09
26.64
26.91
26.93
27.22
27.33
27.12
26.72
26.50
26.50
26.64
26.86
26.90
26.89
26.85
26.83
26.94
26.92
26.97
27.31
27.36
27.38
27.44
27.45
27.46
27.48
27.40
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.0100
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000817 -0.004630
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.002081 0.005717
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
0.000000 0.000000
109
В результате решения на печать выдается информация в виде блоков.
Блок 1 повторяет подготовленные исходные данные в полном объеме, а
также включает текст следующего вида:
Диаметр трубы:
0.8200
Предел текучести металла трубы:
0.4500E+09
Температ. укладки, эксплуатации:
0.0
Давление:
0.5000E+07
Коэффициент постели грунта:
0.3000E+06
Шаг сетки
1.0
50.0
Блок 2 представляет собой промежуточный этап формирования конечно-элементной сетки. Определяются координаты контрольных точек, номера
узлов конечно-элементой сетки в контрольных точках, дистанции контрольных точек.
Блок 3 представляет собой вспомогательные параметры: угол поворота
оси Z в глобальной системе координат, координаты начала и конца участка,
номера узлов конечно-элементной сетки.
Блок 4 является результатом окончательного формирования конечноэлементной сетки. Он представляет собой массив чисел с характеристиками
всех конечных элементов с шагом 1 м.
Блок 5 формируется по результатам прогонок (последовательных приближений). Первый столбец образуется из номеров прогонок. Второй столбец характеризует отличие результатов от предыдущей прогонки. О точности
расчётов можно судить по уменьшению чисел во втором столбце и по стабилизации чисел в остальных столбцах.
Блок 6 сформирован из результатов окончательного решения. Здесь
даются все компоненты смещений, сил, напряжений в каждом элементе (с
шагом 1 м). Также указываются (для контроля) координаты, кривизна, коэффициент нагрузки элементов. Коэффициент нагрузки находится в последнем
столбце и представляет собой отношение максимального эквивалентного
напряжения в элементе к пределу текучести металла трубы.
110
Блок 7 включает некоторые интегральные характеристики всего участка: наибольшие и наименьшие смещения, продольные напряжения, эквивалентные напряжения. Блок имеет следующий вид:
UMIN
-0.1325E+01
UMAX
VMIN
0.2557E+00 -0.5083E+01
SMIN
-0.4469E+09
SMAX (нормальное продольное min max)
0.3197E+09
SEQW MIN
0.1000E+07
VMAX
0.9086E+00
MAX (эквивалентное)
0.5737E+09
По этим характеристикам можно определить, что на данном участке
продольные напряжения находятся в диапазоне 446,9; 319,7 МПа. Эквивалентные напряжения достигают значения 573,7 МПа, что превышает
предел текучести металла. Следовательно, на данном участке имеется перенапряженная зона, которая представляет опасность развития пластических
деформаций (в данном случае есть вероятность гофрообразования). Местоположение опасной зоны может быть определено из графиков или из таблиц
блока 6.
На рисунках 4.3 – 4.7 приводятся некоторые графики, полученные решением данного примера при температуре + 50 С, рабочее давление равно
5,0 МПа.
НДС того же трубопровода при температуре до 0 С и давлении
5,0 МПа характеризуется следующими цифрами:
SMIN
-0.3215E+09
SEQW MIN
0.1000E+07
SMAX (нормальное продольное min max)
0.4415E+09
MAX (эквивалентное)
0.4557E+09
Как видим, максимальное значение эквивалентного напряжения снизилось до уровня 455,7 МПа, что также остаётся выше нормативного предела
текучести металла трубы.
111
Рисунок 4.3 – Характеристики пространственного положения
трубопровода: отклонение от прямой в горизонтальной
(U) и вертикальной (V) плоскостях
Рисунок 4.4 – Расположение участков холодного гнутья
на трубопроводе: Crx, Сry – кривизна в горизонтальной
и вертикальной плоскостях, 1/м
112
Рисунок 4.5 – Напряжения изгиба в горизонтальной (а)
и вертикальной (б) плоскостях
Рисунок 4.6 – Продольные (фибровые) напряжения в стенке трубопровода
113
Рисунок 4.7 – Характеристика нагруженности K экв / т участка
трубопровода при рабочей температуре 0 С, рабочем
давлении 5,0 МПа (затемнением выделены
перегруженные зоны)
4.6. Важнейшие отличительные особенности метода и алгоритма
Разработанные методика и алгоритм определения НДС трубопроводов
имеют ряд отличительных полезных особенностей по сравнению с известными другими.
4.6.1. Уточнение реакции грунта в процессе расчётов
Методика позволяет учитывать самые сложные законы взаимодействия
трубопровода с грунтом [7, 8, 19, 22, 51, 53, 58, 106]. Это достигается за счёт
применения метода последовательных приближений, когда становится возможной корректировка сил в зависимости от изменения положения трубопровода. В наиболее простом представлении реакция грунта состоит из нескольких составляющих.
Вертикальная составляющая реакции грунта
Вертикальная поперечная составляющая реакции грунта (единица измерения Н/м) определяется двумя составляющими, характеризующими действие грунта снизу и сверху:
114
q гр(y) q гр q гр .
(4.7)
Действие грунта снизу q гр определяется вертикальным смещением
трубы относительно грунта, действие сверху q гр объемом грунта над трубой (рисунок 4.8). Они зависят от механических свойств и плотности грунта,
вычисляются по следующим приближённым формулам.
а)
б)
в)
.
Рисунок 4.8 – К оценке вертикальной составляющей реакции грунта
Труба полностью находится в грунте на глубине h (случай а):
при v 0
q гр ( у) С y v D h 0,1073 D D гр ,
(4.8)
при v 0
q г р ( у) h 0,1073 DD г р .
(4.9)
Труба частично заглублена в грунт, случай D H 0,5 D :
при v 0
q г р ( у) С y v у D гр D 2 f гр () ,
(4.10)
при v > 0
q г р ( у) гр D 2 f гр () .
(4.11)
Труба частично заглублена в грунт, случай 0,5 D H 0 :
при v 0
q г р ( у) С y v y D ,
(4.12)
при v > 0
q г р ( y) 0 .
(4.13)
Здесь v смещение трубы по вертикали от исходного состояния. Смещение
вверх считается положительным, вниз отрицательным. Значения v заранее
неизвестны, определяются в ходе решения задачи о напряжениях;
115
Cy коэффициент постели грунта (при вертикальном смещении), который определяется по справочникам или непосредственными измерениями на
местности. Для плотного глинистого грунта Cу 107 Па/м;
гр удельный вес грунта, Н/м3;
fгр() поправочная функция, зависящая от параметра 2 Н / D 1 ,
определяется по формуле:
f гр ( )
1
(2 1 2 ) arccos( ) .
4
2
(4.14)
Итоговая опорная реакция грунта направлена вертикально вверх или
вниз, учитывается и уточняется в процессе решения задачи.
Горизонтальная составляющая реакции грунта
Определяется по формуле:
q гр ( х ) С x u D ,
где
(4.15)
u поперечное смещение трубы от исходного состояния в горизон-
тальной плоскости (по оси х, рисунок 2.2). Значения u заранее могут быть не
известны, тогда определяются в процессе решения задачи;
Cх коэффициент постели грунта при смещении трубы в горизонтальной плоскости.
Продольная составляющая реакции грунта формируется за счёт сил
сцепления между трубопроводом и грунтом:
q гр ( z ) С w w z D ,
где
(4.16)
Сw – коэффициент сцепления при продольном смещении трубы относи-
тельно грунта, по форме напоминающий коэффициент постели (но при
скольжении), по физической природе соответствующий коэффициенту трения между поверхностью трубы и грунтом.
Здесь необходимо учитывать, что все компоненты реакции грунта
имеют пределы. То есть реакция грунта не может расти бесконечно по мере
увеличения смещения трубопровода относительно грунта. При некотором
смещении сопротивление грунта перестает расти, аналогично пределу теку-
116
чести материалов. Предельное значение реакции грунта можно называть
пределом текучести грунта соответственно в горизонтальном, вертикальном, осевом направлениях.
Действие воды на водных переходах или обводненных участках в зависимости от особенностей местности определяется:
выталкивающей (архимедовой) силой, направленной вертикально
вверх;
гидродинамическим воздействием потока воды;
гидростатическим сжатием воды на глубине.
Выталкивающая сила воды (архимедова сила) на единицу длины трубы
определяется по следующим формулам.
Сечение трубы находится полностью ниже уровня воды (рисунок 4.9, а):
q арх ( у ) вод
D2
.
4
(4.17)
Сечение трубы находится частично ниже уровня воды (рисунок 4.9):
q арх ( у )
где
D2
вод
f вод () ,
4
(4.18)
вод = 9800 Н/м3 удельный вес воды;
fвод() поправочная функция, зависящая от параметра = d/D, и
определяемая по формуле:
f вод ()
а)
1
arc cos(2 1) 2 (2 1) 2 .
б)
Рисунок 4.9 – Схемы расположения трубы в воде
(4.19)
117
Гидродинамическое воздействие потока воды на трубопровод (давление течения, рисунок 4.10) определяется по формуле:
1
q C вод 2 D ,
2
где
(4.20)
q сила напора потока воды на 1 м трубопровода, Н/м;
С коэффициент лобового сопротивления;
вод = 1000 кг/м3 плотность воды;
перпендикулярная составляющая скорости потока воды, м/с;
D глубина подводной части трубопровода с учетом футеровки, м.
Рисунок 4.10 К оценке давления потока воды
Сила напора воды q разлагается на три составляющие:
qх горизонтальная статическая;
qу вертикальная статическая, возникающая из-за близости дна и
несимметричного обтекания трубы снизу и сверху, направленная вверх;
qк колебательная, вызывающая вибрацию.
Коэффициенты Cх и Су зависят от гидравлического режима реки,
шероховатости поверхности трубы, от положения трубопровода относительно дна русла. Для футерованных трубопроводов в расчетах принимают следующие коэффициенты:
горизонтальная составляющая (статика) Сх = 1,1 ... 1,2;
вертикальная составляющая (статика)
колебательная
СК = 0,20 ... 0,23.
составляющая
в
Су = 0,5 ... 0,6;
поперечном
направлении
118
Гидростатическое сжатие воды имеет смысл учитывать при глубинах
не менее 10 м. Глубина h вызывает сжимающие напряжения в стенке трубы:
кц ( h )
где
h вода D 2 т
,
2 т
(4.21)
h – глубина оси трубопровода в воде;
вод = 9800 Н/м3 – удельный вес воды.
Уточнение реакции грунта QГР в процессе решения
Особенностью разрабатываемого алгоритма расчёта является то, что в
процессе расчёта периодически уточняется реакция грунта. Грунт может действовать и сверху, и снизу трубы в соответствии со схемой на рисунок 4.11.
Рисунок 4.11 – Возможные случаи взаимодействия трубы с грунтом
Случай а):
Qтр – вес трубы с продуктом;
Q1 – вес грунта сверху трубы; Q1 ГР D h (G гл 0,1073 D) ;
h – длина конечного элемента;
Q2 – реакция грунта снизу трубы.
В равновесном состоянии, когда смещение трубы V V V0 0 ,
справедливо равенство Q 2 Q тр Q1 .
119
Если труба получила некоторое смещение V 0 , то величины QТР и
Q1 не меняются, Q2 меняется. Изменение Q 2 C V V C V (V V0 ) . В
итоге Q1 становится равным: Q1 C V (V V0 ) Q Т Р Q1 .
При смещении трубы вверх (то есть при увеличении V) сила Q1 уменьшается и при некотором значении VПР становится равной нулю. При дальнейшем увеличении V сила Q1 отсутствует. Так получаем случай г).
Предельное значение VПР, при котором исчезает сила Q1, определяется
так: VПР V0
Q Т Р Q1
.
CV
При V VПР под трубой образуется зазор величиной V VПР .
Силы Q1 и Q2 имеют следующие ограничения:
0 Q1 Q ПР ( ) ;
0 Q 2 Q ПР ( ) .
Здесь в правых частях неравенств
предельные сопротивления грунта при смещении трубы вниз и вверх соответственно.
Случай б). Этот случай реализуется, если глубина трубы G гл H ГР V
отрицательна, но по абсолютной величине не более D:
D G гл 0 .
При этом сила Q1 отсутствует.
Случай в). Этот случай реализуется, если глубина трубы G гл H ГР V
отрицательна и по абсолютной величине более D:
G гл D .
При этом силы Q1 и Q2 отсутствуют.
Данные рекомендации реализуются в Подпрограмме уточнения внешних сил на участке QQQ (Приложение 4).
4.6.2. Погрешность подготовки исходных данных
Необходимость учёта погрешности исходных данных особенно важна
при определении координат контрольных точек (см. таблицу 4.1). Дело в том,
что точное определение координат точек подземного трубопровода невозможно никаким способом. При внутритрубной диагностике погрешность ко-
120
ординат составляет порядка 10 см при самых тщательных измерениях. Поэтому, если «пропускать» трубопровод через контрольные точки, положение
которых найдено с погрешностью 10 см, то получим случайные поля напряжений, отличающиеся от фактического состояния значительно. При этом теряется ценность получаемых результатов. Поэтому в разработанной методике предусмотрены своеобразные «ворота», через которые необходимо «пропускать» трубопровод. Широта «ворот» соответствует погрешности измерений координат. Существенное ограничение смещениям «включается» только
в тех случаях, когда трубопровод в контрольных точках стремится выходить
за пределы установленных «ворот».
Такой же подход может быть применён и по отношению ко всем исходным параметрам. Это достигается за счёт того, что в тексте программы
предусмотрены соответствующие проверки и ограничения. Такие операции
невозможно предусмотреть при прямых методах решений. Они возможны
только в методе последовательных приближений.
4.6.3. Моделирование процессов и принятие оптимальных решений
В параграфе 4.4 был рассмотрен пример, где обнаружились перенапряженные места трубопровода. Было также показано, что степень перегрузки
зависит от температуры. Легко догадаться, что степень перегрузки в той или
иной степени будет зависеть от всех исходных параметров. Поэтому возникает потребность не только исследовать эти зависимости, но и найти такие
технические решения (замена труб, ремонт, уплотнение грунта, установка
дополнительных опор или анкеров), после выполнения которых местные перегрузки исчезнут, трубопровод придёт в устойчивое безопасное состояние.
Разработанные методика и расчётная программа позволяют эту задачу
решать, последовательно заменяя одни элементы на другие или вводя или
исключая какие-то воздействия. То есть имеется возможность численного
121
моделирования вариантов ремонта трубопровода. Это позволяет оптимизировать обслуживание и ремонт трубопроводов.
В качестве примера на рисунках 4.12 и 4.13 приведены графики распределения
продольных
напряжений
на
участке
нефтепровода
1220 14,5 мм после его вскрытия и последующей засыпки. Вскрытый
участок в пределах 100…203 м содержит кривые холодного гнутья и в профиле близок к форме натянутой нити (цепи). После засыпки и подачи давления 6,0 МПа напряжения увеличиваются почти в два раза, а под трубой остаётся полость длиной порядка 20 м. Программа позволила проследить изменения напряжений и состояние полости при различных температурах и рабочих
давлениях.
Рисунок 4.12 – Распределение продольных напряжений после вскрытия
нефтепровода (v – высота по верхней образующей;
q – поперечные силы на длине 1 м; продольные
напряжения по верхней и нижней образующим)
122
Рисунок 4.13 – Распределение продольных напряжений после засыпки
нефтепровода и подачи давления 6,0 МПа
4.6.4. Оценка опасности дефектов, обнаруженных при ВТД
Как известно, при внутритрубной диагностике обнаруживается большое количество дефектов разных типов: коррозионные, механические, сварочные. После обнаружения дефектов производится оценка степени их опасности на предмет необходимости и сроков устранения. При этом обычно
опираются на проектное давление, температуру, категорию участка, но не
учитывают местные перенапряжения, вызванные грунтовыми изменениями,
изгибом, смещениями. Это, как показывают рассмотренные примеры, может
привести к существенным погрешностям в оценке и даже к ошибкам.
Разработанная методика оценки НДС, основанная на тех же измерениях при ВТД, может исключить такие ошибки и существенно повысить эффективность всех работ: диагностики, расчётной оценки, ремонта трубопроводов.
123
Выводы по главе 4
1. На основе математического аппарата, изложенного в предыдущих
главах, разработаны алгоритм и программный комплекс расчёта напряженнодеформированного состояния подземных трубопроводов, где в качестве исходных данных используются результаты внутритрубной диагностики.
Даны описания алгоритма и структуры программы, последовательности работ, в том числе по вопросам выбора системы координат и расчётных
формул, подготовке исходных данных, по точности исходных данных и результатов счёта, по форме представления результатов расчётов.
2. Изложены принципиальные отличительные особенности программного комплекса, которые дают возможность:
использовать результаты ВТД и других видов обследований в качестве исходных данных для оценки НДС;
учитывать исходную кривизну участков;
задавать реакции грунта в виде зависимостей любых форм (необязательно линейных);
учитывать действие воды в вертикальном и горизонтальном направлениях;
учитывать погрешности измерений при подготовке исходных данных.
3. Программный комплекс позволяет моделировать варианты ремонтных работ и выбрать оптимальные решения.
4. Рассмотрен пример расчёта НДС на одном из участков магистрального нефтепровода, который показал эффективность разработанной методики.
124
ОСНОВНЫЕ ВЫВОДЫ
1. Разработана математическая модель подземного трубопровода в общем виде с учётом кривизны и распределенных внешних и внутренних сил.
Получена система дифференциальных уравнений равновесия, включающая
два уравнения продольно-поперечного изгиба во взаимно-перпендикулярных
плоскостях и одно уравнение продольного сдвига.
2. Получены необходимые для метода конечных элементов формулы,
выражающие зависимость энергии деформаций и функции Лагранжа от координат узлов кольцевых элементов с учётом кривизны и действующих сил.
Показано, что в области равновесного состояния функцию Лагранжа можно
заменить полиномами второй степени. Это позволяет упростить решение задачи при произвольно заданных видах взаимодействия трубопровода
с грунтом.
3. Исследовано влияние кривизны трубопровода на напряженное состояние и энергию деформаций. Показано, что при оценке энергии деформаций с погрешностью не более 5 % можно пренебречь кривизной по оси 0 в
области / D 0,02 и 0 / D 1,5 (D и соответственно диаметр и толщина
стенки трубы). При оценке максимальных напряжений и прочности такая же
погрешность соответствует области 0 / D 6 .
4. Разработан программный комплекс, позволяющий по данным внутритрубной диагностики с использованием навигационных датчиков рассчитывать напряженно-деформированное состояние подземных магистральных
трубопроводов с учётом произошедших за время эксплуатации грунтовых
изменений. Комплекс позволяет:
использовать результаты ВТД и всех других видов обследований в ка-
честве исходных данных при оценке НДС подземного трубопровода;
учитывать исходную кривизну участков и элементов;
задавать реакции грунта в виде зависимостей любых форм (необяза-
тельно линейных);
125
учитывать действие воды в вертикальном и горизонтальном направле-
ниях;
учитывать погрешности измерений при подготовке исходных данных;
моделировать разные варианты ремонта дефектных участков и выбрать
оптимальное техническое решение.
5. Разработанные методика и программный комплекс позволяют существенно повысить эффективность контроля технического состояния подземных трубопроводов за счёт определения фактических напряжений на месте
расположения дефектов при разных сочетаниях внешних условий и режимов
эксплуатации.
6. Методика апробирована на нефтепроводах месторождения «Ванкор»
и на магистральном газопроводе Челябинск Петровск. Она показала свою
эффективность и позволила выявить опасные места с точки зрения гофрообразования и развития стресс-коррозии. Последующие шурфовые обследования подтвердили результаты оценки. С помощью методики были предложены технические решения, исключающие данные источники опасности.
126
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Абакумов, А. А. Магнитная диагностика газопроводов Текст /
А. А. Абакумов, А. А. Абакумов (мл.) М.: Энергоатомиздат, 2001. 433 с.
2. Абдуллин, И. Г. Диагностика коррозионного растрескивания трубопроводов Текст / И. Г. Абдуллин, А. Г. Гареев, А. В. Мостовой. Уфа: Гилем, 2003.
100 с.
3. Айнбиндер, А.Б. Расчет магистральных и промысловых трубопроводов
на прочность и устойчивость Текст: справочное пособие / А. Б. Айнбиндер. М.:
Недра, 1991. 287 с.
4. Алимов, С. В. Диагностика коррозионного растрескивания газопроводов
Текст / С. В. Алимов, И. А. Долгов, В. Д. Горчаков, Ю. П. Сурков, А. Ю. Сурков,
В. Г. Рыбалко. Екатеринбург: ИФМ УрОРАН, 2004. – 84 с.
5. Анго Андре. Математика для электрорадиоинженеров Текст / Андре
Анго. М.: Наука, 1967. – 780 с.
6. Антонов, В. Г. Исследование условий и причин коррозионного растрескивания труб магистральных газопроводов Текст / В. Г. Антонов, А. В. Балдин,
З. Т. Галиуллин и др.. – М.: ВНИИЭгазпром, 1991. – 43 с.
7. Аронов, Р. И. Исследование условий взаимодействия трубы и грунта при
продольных перемещениях трубопровода Текст / Р. И. Аронов // Тр. ин-та /
ВНИИстройнефть. М.: Гостоптехиздат, 1953. С. 54-72.
8. Аронов, Р. И. Защемление трубопроводов в грунте и особенности их работы в районах горных выработок Текст / Р. И. Аронов, А. Г. Камерштейн // Тр.
ин-та / ВНИИстройнефть. М.: Гостоптехиздат, 1953. – С. 35-53.
9. Асадуллин, М. З. Коррозионное растрескивание труб магистральных газопроводов Текст / М. З. Асадуллин, Р. Р. Усманов, Р. М. Аскаров, А. Г. Гареев,
С. М. Файзуллин // Газовая промышленность. 2000. № 2. – С. 38-39.
10. Аскаров, Р. М. О прогнозе развития дефектов КРН по данным внутритрубной дефектоскопии Текст / Р. М. Аскаров // НТС «Транспорт и подземное
хранение газа». 2007. № 4. С. 58-61.
127
11. Аскаров, Р. М. Прогноз коррозионного состояния газопровода на основе
данных внутритрубной дефектоскопии Текст / Р. М. Аскаров, Г. Р. Аскаров //
Геотехнические и эксплуатационные проблемы нефтегазовой отрасли: матер.
Междунар. научн.-техн. конф. – Тюмень: ТюмГНТУ, 2007. С. 184-190.
12. Бабин, Л. А. Типовые расчеты по сооружению трубопроводов Текст /
Л. А. Бабин, Л. И. Быков, В. Я. Волохов. М.: Недра, 1979. 176 с.
13. Бабич, В. К. Деформационное старение стали Текст / В. К. Бабич,
Ю. П. Гуль, И. Е. Долженков. М.: Металлургия, 1972. 320 с.
14. Басов, К. А. ANSYS в примерах и задачах Текст / К. А. Басов: под ред.
Д. Г. Красковского. М.: КомпьютерПресс, 2002. 224 с.
15. Басов, К. А. ANSYS: Справочник пользователя Текст / К. А. Басов.
М.: ДМК Пресс, 2005. 640 с.
16. Безухов, Н. И. Основы теории упругости, пластичности, ползучести
Текст / Н. И. Безухов. М.: Высшая школа, 1968. 512 с.
17. Безухов, Н. И. Приложение методов теории упругости и пластичности к
решению инженерных задач Текст / Н. И. Безухов, О. В. Лужин. М.: Высшая
школа, 1974. 200 с.
18. Биргер, И. А. Сопротивление материалов Текст / И. А. Биргер,
Р. Р. Мавлютов. М.: Наука, 1985. 560 с.
19. Бородавкин, П. П. Механика грунтов в трубопроводном строительстве
Текст / П. П. Бородавкин. М.: Недра, 1976. 224 с.
20. Бородавкин, П. П. Подземные магистральные трубопроводы Текст /
П. П. Бородавкин. М.: Недра, 1982. 324 с.
21. Бородавкин, П. П. Прочность магистральных нефтепроводов Текст /
П. П. Бородавкин, А. М. Синюков. М.: Недра, 1984. 245 с.
22. Бородавкин, П. П. Трубопроводы в сложных условиях Текст / П. П. Бородавкин, В. Д. Таран. М.: Недра, 1968. 304 с.
23. Будзуляк, Б. В. Методология повышения эффективности системы трубопроводного транспорта газа на стадии развития и реконструкции Текст /
Б. В. Будзуляк. М.: Недра, 2003. 176 с.
128
24. Валекжанин, Д. Ю. Линейный вариант метода конечных элементов для
исследования напряженно-деформированного состояния трубопроводов Текст /
Д. Ю. Валекжанин // Проблемы и методы обеспечения надёжности и безопасности
систем транспорта нефти, нефтепродуктов и газа: матер. научн.-практ. конф. 23 мая
2012 г. – Уфа, 2012. С. 140-141.
25. Васин, Е. С. Определение опасности дефектов стенки труб магистральных нефтепроводов по данным дефектоскопов «Ультраскан» Текст / Е. С. Васин
// Трубопроводный транспорт нефти. 1997. № 9. С. 24-27.
26. Вилиюлин, И. И. Современные технические решения по ремонту газопроводов Текст: матер. НТС ОАО «Газпром» / И. И. Вилиюлин. М., 2004. Т. 1.
С. 8-15.
27. Власов, В. Т. Физические основы метода магнитной памяти металла
Текст / В. Т. Власов, А. А. Дубов. М.: ЗАО «ТИССО», 2004. – 424 с.
28. Галлямов, А. К. Обеспечение надежности функционирования системы
нефтепроводов на основе технической диагностики Текст / А. К. Галлямов,
К. В. Черняев, А. М. Шаммазов. Уфа: УГНТУ, 1998. 600 с.
29. Гимазетдинов, И. Р. Некоторые особенности напряженного состояния
трубопроводов с Z-образными компенсаторами Текст / И. Р. Гимазетдинов,
В. С. Шадрин, А. К. Гумеров // НТЖ «Проблемы сбора, подготовки и транспорта
нефти и нефтепродуктов» / ИПТЭР. – 2014. Вып. 2 (96). – С. 113-118.
30. Глазков, А. С. Метод аппроксимирующих функций в численном решении задач о напряженном состоянии трубопровода Текст / А. С. Глазков,
В. С. Шадрин // Трубопроводный транспорт – 2013: матер. IX Междунар. учебн.научн.-практ. конф. – Уфа: УГНТУ, 2013. – С. 272-274.
31. Глазков, А. С. Моделирование технического состояния магистральных
нефтегазопроводов с учётом эффектов неоднородности Текст: автореф. ... канд.
техн. наук: 25.0019 / Глазков Антон Сергеевич. Уфа, 2013. 24 с.
32. ГОСТ 21104-75. Контроль неразрушающий. Феррозондовый метод
Текст. Введ. 1976-06-30. 6 с.
33. Григорашвили, Ю. Е. Физические основы метода магнитной локации при
оценке состояния изоляционного покрытия Текст / Ю. Е. Григорашвили,
129
К. М. Гумеров, Ю. В. Стицей, В. В. Иваненков // Проблемы и методы обеспечения
надёжности и безопасности систем транспорта нефти, нефтепродуктов и газа: матер. научн.-практ. конф. 22 мая 2007 г. Уфа, 2007. С. 259-260.
34. Гумеров, А. Г. Безопасность длительно эксплуатируемых магистральных
нефтепроводов Текст / А. Г. Гумеров, Р. С. Гумеров, К. М. Гумеров. М.: Недра,
2001. 305 с.
35. Гумеров, А. Г. Капитальный ремонт подземных нефтепроводов Текст /
А. Г. Гумеров, А. Г. Зубаиров, Х. А. Азметов и др..
М.: ООО «Недра-
Бизнесцентр», 1999. 525 с.
36. Гумеров, А. Г. Разработка методов повышения ресурса длительно эксплуатирующихся нефтепроводов Текст / А. Г. Гумеров, К. М. Гумеров, А. В. Росляков // Обзорная информация. Серия «Транспорт и хранение нефти». М.:
ВНИИОЭНГ, 1991. 84 с.
37. Гумеров, А. Г. Старение труб нефтепроводов Текст / А. Г. Гумеров,
Р. С. Зайнуллин, К. М. Ямалеев, А. В. Росляков. М.: Недра, 1995. 218 с.
38. Гумеров, А. К. Моделирование напряженно-деформированного состояния трубопровода за пределами упругости Текст / А. К. Гумеров, А. В. Фролов,
М. Ф. Сунагатов, Р. Р. Шафиков // НТЖ «Территория «НЕФТЕГАЗ», 2010. № 8.
С. 62-66.
39. Гумеров, А. К. Об эффективности компенсаторов на надземных трубопроводах Текст / А. К. Гумеров, И. Р. Гимазетдинов, В. С. Шадрин // Проблемы
строительного комплекса России: матер. XVIII Междунар. научн.-техн. конф. 12-14
марта 2014 г. – Уфа: УГНТУ, 2014. – С. 237-238.
40. Гумеров, А. К. Уравнения продольно-поперечного изгиба и сдвига трубопроводов с учётом исходной кривизны участков Текст / А. К. Гумеров,
В. С. Шадрин, Д. Ю. Валекжанин, Р. Х. Идрисов, Р. Х. Хазипов // НТЖ «Проблемы
сбора, подготовки и транспорта нефти и нефтепродуктов» / ИПТЭР. – 2013. Вып.
4 (94). – С. 77-82.
41. Гумеров, А. К. Уравнения состояния трубопровода с учётом исходной
кривизны Текст / А. К. Гумеров, В. С. Шадрин, Д. Ю. Валекжанин // Энергоэф-
130
фективность. Проблемы и решения: матер. XIII Всеросс. научн.-практ. конф. 23 октября 2013 г. – Уфа, 2013. – С. 283-285.
42. Гумеров, К. М. Некоторые перспективные методы обеспечения надежности магистральных нефтепроводов Текст / К. М. Гумеров, А. Б. Галяутдинов,
Р. Ф. Хажиева и др. // Безопасность труда в промышленности. 2000. № 9.
С. 8-12.
43. Гумеров, К. М. Расчет напряжений на трубопроводе при осадке грунта
после выборочного ремонта Текст / К. М. Гумеров, И. К. Гумеров, У. Н. Сабиров
// Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов: сб. научн.
тр. Уфа: ИПТЭР, 1995. С. 66-72.
44. Гумеров, Р. С. Комплексная система обеспечения работоспособности
нефтепроводов Текст: автореф. ... д-ра техн. наук: 25.00.19 / Гумеров Риф Сайфуллович. Уфа, 1997. 38 с.
45. Гутман, Э. М. Механохимия металлов и защита от коррозии Текст /
Э. М. Гутман. – М.: Металлургия, 1981. – 120 с.
46. Дарков, А. В. Сопротивление материалов Текст: учебник для вузов /
А. В. Дарков, Г. С. Шпиро. – М.: Высшая школа, 1989. – 624 с.
47. Добронравов, В. В. Курс теоретической механики Текст / В. В. Добронравов, И. Н. Никитин, А. Л. Дворников. – М.: Высшая школа, 1974. – 526 с.
48. Долгов, И. А. Оценка изменения стресс-коррозионной повреждаемости
по результатам повторной ВТД Текст / И. А. Долгов, В. А. Горчаков, Ю. П. Сурков, В. Г. Рыбалко, А. Ю. Сурков // Дефектоскопия. – 2007. № 1. – С. 16-24.
49. Дубов, А. А. Метод магнитной памяти металла и приборы контроля
Текст: учебное пособие / А. А. Дубов, Ал. А. Дубов, С. М. Колокольников. – М.:
ЗАО «ТИССО», 2008. – 365 с.
50. Зайнуллин, Р. С. Механика катастроф. Обеспечение работоспособности
оборудования в условиях механохимической повреждаемости Текст / Р. С. Зайнуллин. Уфа: МНТЦ «БЭСТС», 1997. 426 с.
131
51. Зарембо, К. С. Исследования работы подземных газопроводных труб.
Вопросы добычи, транспорта и переработки природных газов Текст / К. С. Зарембо. М.: Гостоптехиздат, 1951. 377 с.
52. Зенкевич, О. Метод конечных элементов в технике Текст / О. Зенкевич.
– М.: Мир, 1975. – 541 с.
53. Идрисова, Я. Р. Выбор модели взаимодействия трубопровода с грунтом
при оценке напряженно-деформированного состояния Текст / Я. Р. Идрисова,
В. П. Климов, Р. Х. Идрисов // НТЖ «Проблемы сбора, подготовки и транспорта
нефти и нефтепродуктов» / ИПТЭР. – 2014. Вып. 2 (96). – С. 126-133.
54. Инструкция по внутритрубной инспекции трубопроводных систем
Текст: РД 51-2-97. М.: ООО «ИРЦ Газпром», 1997. – 50 с.
55. Инструкция по диагностике технического состояния трубопроводов бесконтактным магнитометрическим методом Текст: РД 102-008-2002: утв. АО
ВНИИСТ 09.10.2002 г. 53 с.
56. Инструкция по магнитному контролю линейной части магистральных газонефтепродуктопроводов. Основные положения Текст: ВРД 39-1.11-027-2001:
утв. Госгортехнадзором России (постановление № 10-03/46 от 15.01.2001 г.).
57. Каплун, А. Б. ANSYS в руках инженера Текст: практическое руководство / А. Б. Каплун, Е. М. Морозов, М. А. Олферьева. М.: Книжный дом «ЛИБРОКОМ», 2009. 272 с.
58. Клейн, Г. К. Расчет подземных трубопроводов Текст / Г. К. Клейн.
М.: Стройиздат, 1969. 240 с.
59. Климов, П. В. Исследование и разработка методов торможения стресскоррозии на примере магистральных газопроводов Средняя Азия Центр Текст /
П. В. Климов, К. М. Гумеров, Р. Н. Кунафин. – СПб.: ООО «Недра», 2011. – 228 с.
60. Корн, Г. Справочник по математике для научных работников и инженеров Текст / Г. Корн, Т. Корн. – М.: Наука, 1968. 831 с.
61. Королёв, М. И. Современные технологии обследования магистральных
газопроводов, подверженных КРН Текст / М. И. Королёв, Н. И. Волгина,
132
В. В. Салюков, А. Н. Колотовский, В. Н. Воронин, С. В. Романцев // Ремонт, восстановление, модернизация. – 2004. № 1. – С. 29-34.
62. Ландау, Л. Д. Теория упругости Текст / Л. Д. Ландау, Е. М. Лившиц. –
М.: Наука, 1987. – 246 с.
63. Ларионов, В. И. Моделирование напряженно-деформированного состояния трубопровода в зоне оползня грунта Текст / В. И. Ларионов, С. П. Сущев,
М. Ф. Сунагатов, Я. Р. Идрисова // НТЖ «Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов» / ИПТЭР. – 2011. Вып. 3 (85). – С. 144-151.
64. Лисин, Ю. В. Методические подходы к ремонту магистральных нефтепроводов на основе данных внутритрубной диагностики Текст / Ю. В. Лисин //
Трубопроводный транспорт нефти. 1999. № 3. С. 20-26.
65. Магистральные трубопроводы Текст: СП 36.13330.2012 (актуализированная редакция СНиП 2.05.06-85*): утв. Федеральным агентством по строительству и жилищно-коммунальному хозяйству 25.12.2012: ввод. в действие с
01.01.1986. 97 с.
66. Макаров, П. С. Совершенствование методов магнитного контроля
напряженно-деформированного состояния элементов конструкций магистральных
трубопроводов Текст: автореф. … канд. техн. наук / Макаров П. С. – Уфа, 2007. –
24 с.
67. Марчук, Г. И. Методы вычислительной математики Текст / Г. И. Марчук. М.: Наука, 1980. 536 с.
68. Методика оперативной компьютерной диагностики локальных участков
газопроводов с использованием магнитной памяти металла Текст: РД 51-1-98:
утв. РАО «Газпром» от 08.05.1998 г. 34 с.
69. Методика определения опасности повреждений стенки труб магистральных нефтепроводов по данным обследования внутритрубными дефектоскопами
Текст. М.: Нокет Информ, 1997. 67 с.
70. Методика оценки фактического положения и состояния подземных трубопроводов с использованием технологии магнитной локации Текст: согласована
с Ростехнадзором РФ письмом за № 11-18/5529 от 24.12. 2007.
133
71. Методические указания по определению остаточного ресурса потенциально опасных объектов, поднадзорных Госгортехнадзору России Текст:
РД 09-102-95: утв. постановлением Госгортехнадзора России от 12.11.1995 г.
№ 57. М.: Госгортехнадзор России, 1995.
72. Методические указания по проведению анализа риска опасных промышленных объектов (с приложением) Текст: РД 08-120-96: утв. Постановлением
Госгортехнадзора России от 12.07.1996 г. № 29. М.: Госгортехнадзор России,1996.
73. Механика разрушения и прочность материалов Текст: справочное пособие: в 4 т. / Под общ. ред. В. В. Панасюка. Киев: Наукова Думка, 1988. 2128 с.
74. Митрофанов, А. В. Принципы прогнозирования работоспособности подземных трубопроводов по результатам электрометрических и внутритрубных обследований Текст / А. В. Митрофанов, С. Б. Киченко // Транспорт и подземное
хранение газа. Экспресс-информация. 1994. № 5. 95 с.
75. Мороз, А. А. Оценка технического состояния и остаточного ресурса
нефтепроводов по результатам диагностики Текст: автореф. ... д-ра техн. наук /
Мороз А. А. Уфа, 2003. 44 с.
76. Морозов, Е. М. Техническая механика разрушения Текст / Е. М. Морозов: под общ. ред. д-ра техн. наук профессора Р. С. Зайнуллина. – Уфа: Изд-во
МНТЦ «БЭСТС», 1997. 389 с.
77. Отт, К. Ф. Механизм и кинетика стресс-коррозии магистральных газопроводов Текст / К. Ф. Отт // Газовая промышленность. 1999. № 7. – С. 46-48.
78. Отт, К. Ф. Стресс-коррозия на газопроводах. Гипотезы, аргументы и факты Текст / К. Ф. Отт // Обзорная информация. Серия «Транспорт и подземное
хранение газа». – М.: ООО «ИРЦ Газпром», 1998. – 73 с.
79. Партон, В. З. Механика упругопластического разрушения Текст /
В. З. Партон, Е. М. Морозов. М.: Наука, 1985. 502 с.
80. Писаренко, Г. С. Справочник по сопротивлению материалов Текст /
Г. С. Писаренко, А. П. Яковлев, В. В. Матвеев. Киев: Наукова Думка, 1975. –
704 с.
134
81. Правила безопасности в нефтяной и газовой промышленности Текст:
ПБ 08-624-03: утв. Постановлением Госгортехнадзора России от 05.06.2003 г.
№ 56. М.: ПИО ОБТ, 2003; Российская газета № 120/1 (3234/1) от 21.06.2003 г.
82. Правила проведения экспертизы промышленной безопасности Текст:
ПБ 03-246-98: утв. Постановлением Госгортехнадзора России от 06.11.1998 г.
83. Притула, В. В. Механизмы и кинетика стресс-коррозии подземных газопроводов Текст / В. В. Притула // Тематический обзор. Серия «Защита от коррозии в газовой промышленности». М.: ООО «ИРЦ Газпром», 1997. 56 с.
84. Проблемы старения сталей магистральных трубопроводов Текст: сб. тр.
научн.-практ. семинара / Под ред. Б. В. Будзуляка и А. Д. Седых; научн. ред.
В. Н. Чувильдеев. – Н. Новгород: Университетская книга, 2006. – 220 с.
85. Разработка научных основ и создание системы безопасной и долговременной эксплуатации магистральных трубопроводов России Текст / К. В. Черняев, М. Ф. Фокин, М. Э. Шварц и др.. М.: АК «Транснефть», 1999. 92 с.
86. Рекомендации по учету старения трубных сталей при проектировании и
эксплуатации магистральных нефтепроводов Текст. Уфа: ВНИИСПТнефть,
1988. 29 с.
87. Российская Федерация. Законы. О защите населения и территорий от
чрезвычайных ситуаций природного и техногенного характера Текст: федеральный закон № 68-ФЗ от 21.12.1994 г.
88. Российская Федерация. Законы. О промышленной безопасности опасных
производственных объектов Текст: федеральный закон № 116-ФЗ от 21.07.1997 г.
89. Руководство по организации системы мониторинга стресс-коррозионных
процессов на трассах действующих и проектируемых магистральных газопроводов
Текст: Р Газпром 2-2.3-421-2010. М.: ООО «Газпром-экспо», 2010. 33 с.
90. Сергеева, Т. К. Механохимическое взаимодействие трубных сталей с
грунтовыми средами, вызывающими стресс-коррозию МГ Текст / Т. К. Сергеева,
М. В. Илюхина, Т. В. Шибаева // Деформация и разрушение материалов: сб. матер.
1-ой Междунар. конф. М., 2006. – С. 569-571.
135
91. Сущев, С. П. Численное моделирование напряжённо-деформированного
состояния трубопровода в зоне продольного оползня Текст / С. П. Сущев,
В. И. Ларионов, М. А. Козлов, П. В. Климов // НТЖ «Территория «НЕФТЕГАЗ». –
2011. № 6. С. 102-107.
92. Тимошенко, С. П. Теория упругости Текст / С. П. Тимошенко, Дж. Гудьер. – М.: Наука, 1979. – 560 с.
93. Фролов, А. В. Обследование воздушного перехода магистрального газопровода Текст / А. В. Фролов, М. Ф. Сунагатов, А. К. Гумеров, Р. Р. Сарбаев //
НТЖ «Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов» /
ИПТЭР. – 2010. Вып. 2 (80). – С. 45-51.
94. Фролов, А. В. Оценка напряжённого состояния подземных трубопроводов с учётом грунтовых изменений в процессе эксплуатации Текст / А. В. Фролов,
Л. Т. Шуланбаева, М. Ф. Сунагатов, А. К. Гумеров // НТЖ «Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов» / ИПТЭР. – 2010. Вып. 1 (79). –
С. 61-66.
95. Чабуркин, В. Ф. Новые возможности ВТД для обеспечения эффективного обслуживания и ремонта газопроводов Текст / В. Ф. Чабуркин, И. И. Баренбойм // Обслуживание и ремонт газонефтепроводов: сб. докл. и сообщений третьей
Междунар. конф. (Сочи, октябрь 2006 г.). – М.: ООО «Геоинформмарк», 2007. –
С. 4-12.
96. Черняев, К. В. Обеспечение безопасной эксплуатации магистральных
нефтепроводов России на основе комплексной программы диагностики, ремонта и
реконструкции их линейной части Текст / К. В. Черняев // Трубопроводный
транспорт нефти. 1997. № 3. С. 18-24.
97. Шабров, Н. Н. Метод конечных элементов в расчетах деталей тепловых
двигателей Текст / Н. Н. Шабров. Л.: Машиностроение, 1983. 212 с.
98. Шадрин, В. С. Динамика изменения напряженного состояния трубопровода после ремонта на ограниченном участке Текст / В. С. Шадрин, Д. Ю. Валекжанин, И. Р. Гимазетдинов // Проблемы и методы обеспечения надёжности и
безопасности систем транспорта нефти, нефтепродуктов и газа: матер. Междунар.
научн.-практ. конф. 23 апреля 2014 г. – Уфа, 2014. С. 245-248.
136
99. Шадрин, В. С. Изменение напряженного состояния трубопровода после
ремонта Текст / В. С. Шадрин, И. Р. Гимазетдинов, К. М. Гумеров // НТЖ «Территория «НЕФТЕГАЗ». 2014. № 8. С. 14-17.
100. Шадрин, В. С. Методика определения напряженно-деформированного
состояния трубопроводов при эксплуатации Текст / В. С. Шадрин, К. М. Гумеров,
Р. С. Абдуллин // НТЖ «Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов» / ИПТЭР. – 2014. Вып. 2 (96). – С. 119-125.
101. Шадрин, В. С. Методика оценки напряженного состояния трубопроводов по результатам внутритрубной диагностики Текст / В. С. Шадрин // Проблемы и методы обеспечения надёжности и безопасности систем транспорта нефти,
нефтепродуктов и газа: матер. Междунар. научн.-практ. конф. 23 апреля
2014 г. – Уфа, 2014. С. 206-210.
102. Шадрин, В. С. Совершенствование методики расчёта напряженнодеформированного состояния изогнутого трубопровода Текст / В. С. Шадрин,
А. П. Завьялов // Актуальные проблемы развития нефтегазового комплекса России:
тез. докл. Х Всеросс. научн.-техн. конф. 10-12 февраля 2014 г. М.: РГУ нефти и
газа им. И.М. Губкина, 2014. С. 121.
103. Шадрин, В. С. Уравнения продольно-поперечного изгиба трубопровода с кривизной Текст / В. С. Шадрин, Д. Ю. Валекжанин, И. Р. Гимазетдинов //
Проблемы строительного комплекса России: матер. XVIII Междунар. научн.-техн.
конф. 12-14 марта 2014 г. – Уфа: УГНТУ, 2014. – С. 239-241.
104. Шадрин, В. С. Численное решение задач о напряженном состоянии
трубопровода методом построения аппроксимирующих функций Текст /
В. С. Шадрин // Энергоэффективность. Проблемы и решения: матер. XIII Всеросс.
научн.-практ. конф. 23 октября 2013 г. – Уфа, 2013. – С. 281-282.
105. Шаммазов, А. М. Расчет и обеспечение прочности трубопроводов в
сложных инженерно-геологических условиях Текст: в 2 т. / А. М. Шаммазов,
Р. М. Зарипов, В. А. Чичелов, Г. Е. Коробков. М.: Интер, 2005. Т. 1: Численное
моделирование напряженно-деформированного состояния и устойчивости трубопроводов. 706 с.
137
106. Шаммазов, А. М. Расчет и обеспечение прочности трубопроводов в
сложных
инженерно-геологических
условиях
Текст:
в
2
т.
/
А. М. Шаммазов, Р. М. Зарипов, В. А. Чичелов, Г. Е. Коробков. М.: Интер, 2006.
Т. 2: Оценка и обеспечение прочности трубопроводов в сложных инженерногеологических условиях. 564 с.
107. Beavers, J. A. Mechanisms of нigh-pH and near-neutral-pH SCC of underground pipelines Text / J. A. Beavers, B. A. Harle // Proc. IPC. Canada, Calgary,
1996.
108. Beavers, J. A. Standart test procedure for stress corrosion cracking threshold stress determination Text / J. A. Beavers, W. E. Berry, R. N. Parkins // Materials
Performance. – 1986. Nо. 6. – P. 9-17.
109. Beirne, I. Low pH stress corrosion cracking Text / I. Beirne,
B. Delanty // Copyright by Ynt, Gas Union. 1991.
110. Chrisman, D. Relationship between pitting, stress and stress corrosion
cracking of line pipe steels Text / D. Chrisman // Corrosion. 1990. Vol. 46. Nо. 6.
Р. 450-453.
111. Harie, B. A. Mechanical and metallurgical effects on low pH stress corrosion cracking of natural gas pipelines Text / B. A. Harie, J. A. Beavers, C. E. Jaske //
Corrosion-95. 1995. P. 646.
112. Parkins, R. N. Intergranular stress corrosion cracking of high-pipeline in
contact with pH solution Text / R. N. Parkins // Corrosion. 1987. Vol. 43. No. 5.
Р. 130.
113. Parkins, R. N. Stress corrosion crack coalescence Text / R. N. Parkins,
P. M. Singh // Corrosion. 1990. Vol. 46. Nо. 6. Р. 486-499.
114. Parkins, R. N. The controlling parameters in stress corrosion cracking
Text / R. N. Parkins // Proc. of 5th Symposium on line pipe research. AGA, 1974.
Catalog № 1.301 74. Р. U-1.
115. Parkins, R. N. Transgranular stress corrosion cracking of high pressure
pipelines in contact with pH solution of near neutral pH Text / R. N. Parkins // Corrosion. 1994. Vol. 50. No. 5.
138
116. Public inquiry concerning stress corrosion cracking on canadian oil and gas
pipelines Text: report of NEB, MH-2-95. Nov. 1996.
117. Punter, A. Hydrogen induced stress corrosion cracking of pipeline Text /
A. Punter, A. T. Fikklers, G. Vanstaen // Materials Protection. 1992. No. 6.
Р. 24-28.
118. Stress corrosion cracking (SCC) Text: report of the inquiry. Canada,
1996.
119. Suteliffe, I. M. Stress corrosion cracking of carbon steel in carbonate solution Text / I. M. Suteliffe, R. R. Fessler, W. K. Boyd, R. N. Parkins // Corrosion.
1972. Vol. 28. P. 313.
120. Urendicek, M. Stress corrosion cracking. Monitoring and control Text /
M. Urendicek, S. Lambert, J. Vosikovsky // Proc. Int. Conf. on Pipeline Reliability (June
2-5, 1992). Calgary, Canada, 1992. P. 22-27.
121. Urendicek, M. Stress corrosion cracking (SCC). Monitoring and control
Text / M. Urendicek, S. Lambert, J. Vosikovsky // Proceedings of International Conference. 1996.
139
ПРИЛОЖЕНИЯ
Приложение 1
Расчёт касательных напряжений при поперечном сдвиге трубы
Текст программы tau.for
IMPLICIT REAL*8(A-H,O-Z)
READ(1,*) D,DEL,Q
101 FORMAT('
D
DEL
*
RH
RB
RH=D/2.
RB=RH-DEL
PI=3.141592654
XJ=0.25*PI*(RH**4-RB**4)
WRITE(2,101)
WRITE(2,100) D,DEL,Q,RH,RB,XJ
WRITE(2,100)
102 FORMAT('
C
B
WRITE(2,102)
DY=0.00001
DC=0.005
CMIN=-RH
CMAX=+RH
KC=1+(CMAX-CMIN)/DC
DO 1 K=1,KC
C=CMIN+(K-1)*DC
CALL BBB(RH,RB,C,B)
LY=1+(RH-C)/DY
SX=0.
DO 2 L=1,LY
Y=C+(L-1)*DY
CALL BBB(RH,RB,Y,VB)
SX=SX+Y*DY*VB
2 CONTINUE
TAU=Q*SX/(XJ*B)
WRITE(2,100) C,B,SX,TAU
1 CONTINUE
A=(4*Q)/(3*PI*DEL)
B=(RH**3-RB**3)/(RH**4-RB**4)
TMAX=A*B
WRITE(2,100) TMAX
100 FORMAT(2X,10E12.3)
STOP
END
SUBROUTINE BBB(RH,RB,CC,B)
IMPLICIT REAL*8(A-H,O-Z)
C=ABS(CC)
IF(C.LT.RH) XX=SQRT(RH*RH-C*C)
IF(C.GE.RH) XX=0.
IF(C.LT.RB) X=SQRT(RB*RB-C*C)
IF(C.GE.RB) X=0.
B=2.*(XX-X)
RETURN
END
Исходные (все величины в системе СИ)
Q
XJ ')
SX
TAU')
140
D,
0.53
DEL,
0.010
Q
100.
Результат (все величины в системе СИ)
С – расстояние от горизонтальной плоскости (рисунок 3)
Sx – статический момент сечения
D – диаметр
DEL – толщина стенки ()
Q – поперечная сила (перерезывающая)
XJ момент инерции поперечного сечения трубы относительно оси х (Jx)
TAU – касательное напряжение ( zy )
D
0.530E+00
DEL
0.100E-01
Q
0.100E+03
RH
0.265E+00
C
-0.265E+00
-0.260E+00
-0.255E+00
-0.250E+00
-0.245E+00
-0.240E+00
-0.235E+00
-0.230E+00
-0.225E+00
-0.220E+00
-0.215E+00
-0.210E+00
-0.205E+00
-0.200E+00
-0.195E+00
-0.190E+00
-0.185E+00
-0.180E+00
-0.175E+00
-0.170E+00
-0.165E+00
-0.160E+00
-0.155E+00
-0.150E+00
-0.145E+00
-0.140E+00
-0.135E+00
-0.130E+00
-0.125E+00
-0.120E+00
-0.115E+00
-0.110E+00
-0.105E+00
-0.100E+00
-0.950E-01
-0.900E-01
-0.850E-01
-0.800E-01
-0.750E-01
-0.700E-01
-0.650E-01
-0.600E-01
-0.550E-01
-0.500E-01
-0.450E-01
-0.400E-01
-0.350E-01
-0.300E-01
B
0.000E+00
0.102E+00
0.144E+00
0.753E-01
0.606E-01
0.524E-01
0.470E-01
0.430E-01
0.400E-01
0.376E-01
0.356E-01
0.340E-01
0.325E-01
0.313E-01
0.303E-01
0.293E-01
0.285E-01
0.277E-01
0.271E-01
0.264E-01
0.259E-01
0.254E-01
0.249E-01
0.245E-01
0.241E-01
0.237E-01
0.234E-01
0.231E-01
0.228E-01
0.225E-01
0.223E-01
0.221E-01
0.219E-01
0.217E-01
0.215E-01
0.213E-01
0.212E-01
0.210E-01
0.209E-01
0.208E-01
0.207E-01
0.206E-01
0.205E-01
0.204E-01
0.203E-01
0.202E-01
0.202E-01
0.201E-01
SX
TAU
0.284E-10 Infinity
0.895E-04
0.158E+03
0.250E-03
0.314E+03
0.368E-03
0.885E+03
0.451E-03
0.135E+04
0.519E-03
0.179E+04
0.578E-03
0.223E+04
0.630E-03
0.265E+04
0.677E-03
0.307E+04
0.720E-03
0.347E+04
0.760E-03
0.386E+04
0.797E-03
0.425E+04
0.832E-03
0.463E+04
0.864E-03
0.499E+04
0.894E-03
0.535E+04
0.923E-03
0.570E+04
0.950E-03
0.604E+04
0.976E-03
0.637E+04
0.100E-02
0.669E+04
0.102E-02
0.701E+04
0.104E-02
0.731E+04
0.107E-02
0.760E+04
0.109E-02
0.789E+04
0.110E-02
0.816E+04
0.112E-02
0.843E+04
0.114E-02
0.869E+04
0.116E-02
0.894E+04
0.117E-02
0.918E+04
0.119E-02
0.941E+04
0.120E-02
0.963E+04
0.121E-02
0.984E+04
0.123E-02
0.100E+05
0.124E-02
0.102E+05
0.125E-02
0.104E+05
0.126E-02
0.106E+05
0.127E-02
0.108E+05
0.128E-02
0.109E+05
0.129E-02
0.111E+05
0.129E-02
0.112E+05
0.130E-02
0.114E+05
0.131E-02
0.115E+05
0.132E-02
0.116E+05
0.132E-02
0.117E+05
0.133E-02
0.118E+05
0.133E-02
0.119E+05
0.134E-02
0.119E+05
0.134E-02
0.120E+05
0.134E-02
0.121E+05
RB
0.255E+00
XJ
0.552E-03
141
-0.250E-01
-0.200E-01
-0.150E-01
-0.100E-01
-0.500E-02
-0.592E-08
0.500E-02
0.100E-01
0.150E-01
0.200E-01
0.250E-01
0.300E-01
0.350E-01
0.400E-01
0.450E-01
0.500E-01
0.550E-01
0.600E-01
0.650E-01
0.700E-01
0.750E-01
0.800E-01
0.850E-01
0.900E-01
0.950E-01
0.100E+00
0.105E+00
0.110E+00
0.115E+00
0.120E+00
0.125E+00
0.130E+00
0.135E+00
0.140E+00
0.145E+00
0.150E+00
0.155E+00
0.160E+00
0.165E+00
0.170E+00
0.175E+00
0.180E+00
0.185E+00
0.190E+00
0.195E+00
0.200E+00
0.205E+00
0.210E+00
0.215E+00
0.220E+00
0.225E+00
0.230E+00
0.235E+00
0.240E+00
0.245E+00
0.250E+00
0.255E+00
0.260E+00
0.265E+00
0.201E-01
0.201E-01
0.200E-01
0.200E-01
0.200E-01
0.200E-01
0.200E-01
0.200E-01
0.200E-01
0.201E-01
0.201E-01
0.201E-01
0.202E-01
0.202E-01
0.203E-01
0.204E-01
0.205E-01
0.206E-01
0.207E-01
0.208E-01
0.209E-01
0.210E-01
0.212E-01
0.213E-01
0.215E-01
0.217E-01
0.219E-01
0.221E-01
0.223E-01
0.225E-01
0.228E-01
0.231E-01
0.234E-01
0.237E-01
0.241E-01
0.245E-01
0.249E-01
0.254E-01
0.259E-01
0.264E-01
0.271E-01
0.277E-01
0.285E-01
0.293E-01
0.303E-01
0.313E-01
0.325E-01
0.340E-01
0.356E-01
0.376E-01
0.400E-01
0.430E-01
0.470E-01
0.524E-01
0.606E-01
0.753E-01
0.144E+00
0.102E+00
0.158E-03
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.135E-02
0.134E-02
0.134E-02
0.134E-02
0.133E-02
0.133E-02
0.132E-02
0.132E-02
0.131E-02
0.130E-02
0.129E-02
0.129E-02
0.128E-02
0.127E-02
0.126E-02
0.125E-02
0.124E-02
0.123E-02
0.121E-02
0.120E-02
0.119E-02
0.117E-02
0.116E-02
0.114E-02
0.112E-02
0.110E-02
0.109E-02
0.107E-02
0.105E-02
0.102E-02
0.100E-02
0.976E-03
0.950E-03
0.923E-03
0.894E-03
0.864E-03
0.832E-03
0.797E-03
0.760E-03
0.720E-03
0.677E-03
0.630E-03
0.578E-03
0.519E-03
0.451E-03
0.368E-03
0.250E-03
0.898E-04
0.420E-09
0.121E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.122E+05
0.121E+05
0.121E+05
0.120E+05
0.119E+05
0.119E+05
0.118E+05
0.117E+05
0.116E+05
0.115E+05
0.114E+05
0.112E+05
0.111E+05
0.109E+05
0.108E+05
0.106E+05
0.104E+05
0.102E+05
0.100E+05
0.984E+04
0.963E+04
0.941E+04
0.918E+04
0.894E+04
0.869E+04
0.843E+04
0.816E+04
0.789E+04
0.760E+04
0.731E+04
0.701E+04
0.669E+04
0.637E+04
0.604E+04
0.570E+04
0.535E+04
0.499E+04
0.463E+04
0.425E+04
0.386E+04
0.347E+04
0.307E+04
0.265E+04
0.223E+04
0.179E+04
0.135E+04
0.885E+03
0.314E+03
0.159E+03
0.480E+00
Расчет по аналитической формуле (В) приводит к такому же результату:
R н D / 2 0,53 / 2 0,265 ; R в R н 0,265 - 0,01 0,255 ;
( zy ) max
4Q R н R в
4 100 (0,265 3 0,255 3 )
0,122 10 5 .
4
4
4
4
3 R н R в
3 3,1416 0,01 (0,265 0,255 )
3
3
142
Приложение 2
Безразмерный параметр при поперечном сдвиге трубы
Текст программы eta.for
IMPLICIT REAL*8(A-H,O-Z)
READ(1,*) D,DEL
WRITE(2,101)
3 READ(1,*) D,DEL
101 FORMAT(' D
DEL
F
XJ
T
RR=D/2.
R=RR-DEL
PI=3.141592654
F=PI*(RR*RR-R*R)
XJ=0.25*PI*(RR**4-R**4)
C
WRITE(2,100) D,DEL,RR,R,F,XJ
102 FORMAT('
ETA')
DY=0.0001
DC=0.0001
CMIN=-RR
CMAX=+RR
KC=1+(CMAX-CMIN)/DC
ETA=0.
DO 1 K=1,KC
C=CMIN+(K-1)*DC
CALL BBB(RR,R,C,B)
2
LY=1+(RR-C)/DY
SX=0.
DO 2 L=1,LY
Y=C+(L-1)*DY
CALL BBB(RR,R,Y,V)
SX=SX+Y*DY*V
CONTINUE
IF(B.EQ.0.) GO TO 1
ETA=ETA+SX*SX*DC/B
1 CONTINUE
ETA=ETA*F/(XJ*XJ)
T=DEL/D
PRINT 100, D,DEL,F,XJ,T,ETA
WRITE(2,100) D,DEL,F,XJ,T,ETA
GO TO 3
100 FORMAT(2X,10E13.5)
STOP
END
SUBROUTINE BBB(RR,R,CC,B)
IMPLICIT REAL*8(A-H,O-Z)
C=ABS(CC)
IF(C.LT.RR) XX=SQRT(RR*RR-C*C)
IF(C.GE.RR) XX=0.
IF(C.LT.R) X=SQRT(R*R-C*C)
IF(C.GE.R) X=0.
B=2.*(XX-X)
RETURN
END
Исходные
1.0
1.0
0.01
0.1
ETA')
143
1.0
1.0
1.0
1.0
0.2
0.3
0.4
0.5
(Диаметр и толщина стенки)
Результат
D – диаметр
DEL – толщина стенки ()
F – площадь поперечного сечения
XJ момент инерции поперечного сечения трубы относительно оси х (Jx)
T – отношение толщины стенки к диаметру (/D – параметр тонкостенности трубы)
ETA – искомый безразмерный параметр ()
D
0.10000E+01
0.10000E+01
0.10000E+01
0.10000E+01
0.10000E+01
0.10000E+01
0.50000E+00
DEL
0.10000E-01
0.10000E+00
0.20000E+00
0.30000E+00
0.40000E+00
0.50000E+00
0.10000E+00
F
0.31102E-01
0.28274E+00
0.50265E+00
0.65973E+00
0.75398E+00
0.78540E+00
0.12566E+00
XJ
0.38107E-02
0.28981E-01
0.42726E-01
0.47831E-01
0.49009E-01
0.49087E-01
0.26704E-02
T
0.10000E-01
0.10000E+00
0.20000E+00
0.30000E+00
0.40000E+00
0.50000E+00
0.20000E+00
ETA
0.14997E+01
0.14694E+01
0.13793E+01
0.12525E+01
0.11462E+01
0.11111E+01
0.13793E+01
Таблица П2.1 – Значения параметра для труб размерами D
/ D
0.1000E-01
0.2000E-01
0.3000E-01
0.4000E-01
0.5000E-01
0.6000E-01
0.7000E-01
0.8000E-01
0.9000E-01
0.1000E+00
0.1100E+00
0.1200E+00
0.1300E+00
0.1400E+00
0.1500E+00
0.1600E+00
0.1700E+00
0.1800E+00
0.1900E+00
0.2000E+00
0.2100E+00
0.2200E+00
0.2300E+00
0.2400E+00
0.2500E+00
0.1500E+01
0.1499E+01
0.1497E+01
0.1495E+01
0.1492E+01
0.1489E+01
0.1485E+01
0.1480E+01
0.1475E+01
0.1469E+01
0.1463E+01
0.1456E+01
0.1448E+01
0.1440E+01
0.1431E+01
0.1422E+01
0.1412E+01
0.1402E+01
0.1391E+01
0.1379E+01
0.1368E+01
0.1356E+01
0.1343E+01
0.1330E+01
0.1318E+01
/ D
0.2600E+00
0.2700E+00
0.2800E+00
0.2900E+00
0.3000E+00
0.3100E+00
0.3200E+00
0.3300E+00
0.3400E+00
0.3500E+00
0.3600E+00
0.3700E+00
0.3800E+00
0.3900E+00
0.4000E+00
0.4100E+00
0.4200E+00
0.4300E+00
0.4400E+00
0.4500E+00
0.4600E+00
0.4700E+00
0.4800E+00
0.4900E+00
0.5000E+00
0.1305E+01
0.1292E+01
0.1278E+01
0.1265E+01
0.1253E+01
0.1240E+01
0.1227E+01
0.1215E+01
0.1204E+01
0.1193E+01
0.1182E+01
0.1172E+01
0.1163E+01
0.1154E+01
0.1146E+01
0.1139E+01
0.1133E+01
0.1127E+01
0.1123E+01
0.1119E+01
0.1116E+01
0.1114E+01
0.1112E+01
0.1111E+01
0.1111E+01
144
Приложение 3
Минимизация функции методом аппроксимации
Пример
Допустим, измерения некоторой величины L проведены в точках
u1 = 1; u2 = 2; u3 = 3. При этом получены значения L1 = 6; L2 = 11; L3 = 18.
Аппроксимируем зависимость L(u) полиномом второй степени:
L a u2 b u c .
Коэффициенты получаем, решая систему уравнений:
6 a 12 b 1 c ;
(П 3.1)
11 a 2 2 b 2 c ;
18 a 32 b 3 c .
Решение в общем виде имеет вид:
a a ;
b b ;
где определители системы уравнений
u1
2
12 1 1
u1 1
u2
2
u2 1 2
u3
2
u3 1
32 3 1
L1 u1 1
6 1 1
2
c
c
,
(П 3.2)
1 1 1
2 1 4 2 1 2 12 9 4 18 3 23 25 2 ;
9 3 1
a L 2 u 2 1 11 2 1 12 33 18 11 36 18 66 68 2 ;
L 3 u 3 1 18 3 1
u1
2
L1 1
1 6 1
b u2
2
L 2 1 4 11 1 11 72 54 99 18 24 4 ;
u3
2
L3 1
2
u1
u1
L1
9 18 1
1 1
6
c u 2
2
u 2 L 2 4 2 11 36 72 99 108 72 33 6 .
u3
2
u 3 L3
9 3 18
Находим коэффициенты аппроксимирующего полинома по (43*):
2
4
6
a a
1;
b b
2;
c c
3.
2
2
2
Получаем аппроксимирующий полином:
145
L 1 u2 2 u 3 .
Находим значение umin, при котором функция L принимает наименьшее значение:
b
2
(П 3.3)
u min
1 .
2a
2 1
При этом
L min 1 u min 2 u min 3 1 2 3 2 .
2
Как видим, следующая таблица подтверждает правильность предложенного метода минимизации функции Лагранжа.
Таблица П 3.1 – Зависимость L(u )
u
-3.00
-2.80
-2.60
-2.40
-2.20
-2.00
-1.80
-1.60
-1.40
-1.20
-1.00
-0.80
-0.60
-0.40
-0.20
0.00
0.20
0.40
0.60
0.80
1.00
L 1 u2 2 u 3
6.000
5.240
4.560
3.960
3.440
3.000
2.640
2.360
2.160
2.040
2.000
2.040
2.160
2.360
2.640
3.000
3.440
3.960
4.560
5.240
6.000
минимум L
точка u1
u
1.00
1.20
1.40
1.60
1.80
2.00
2.20
2.40
2.60
2.80
3.00
3.20
3.40
3.60
3.80
4.00
4.20
4.40
4.60
4.80
5.00
L 1 u2 2 u 3
6.000
6.840
7.760
8.760
9.840
11.000
12.240
13.560
14.960
16.440
18.000
19.640
21.360
23.160
25.040
27.000
29.040
31.160
33.360
35.640
38.000
точка u2
точка u3
146
Приложение 4
Текст расчётной программы на языке Fortran
Основная часть программы
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
РАСЧЕТ НДС НА
ПОДЗЕМНЫХ
УЧАСТКАХ
(возможно освобождение от грунта на перенапряженных участках)
Оценка напряжений по заданным координатам
Система координат НЕПОДВИЖНАЯ
При вводе исходных данных все величины в системе Si
H - шаг сетки
D,DT,E,ALFA - диам, толщ стен, модуль упр, коэф темп расш.
STEK - предел текучести металла трубы
P - рабочее давление
T0 - температура начальная
TE - температура эксплуатации
Z(I) - линейная координата узлов (вдоль трубы)
U(I) - горизонтальная координ трубы (влево +, вправо -)
V(I) - вертикальная координ трубы (вверх +, вниз -)
DT(I) - толщина стенки труб
F(I) - площадь сечения трубы
XJX(I) - момент попер сечения труб
SFI(I) - окружное напряжение
SZ0(I) - осевое напряжение начальное
ZNN(I) - осевая сила
QU(I),QV(I) - проекции внешних сил, действующих на 1 м длины трубы
CRX(I),CRY(I) - кривизна в гориз и вертик плоскостях
SIZGU - напряжение изгиба в горизонтальной плоскости
SIZGV - напряжение изгиба в вертикальной плоскости
SZMIN - продольное напряжение в сечении наименьшее
SZPLU - продольное напряжение в сечении наибольшее
SEQ - эквивалентное напряж в сечении (сравнивают с пределом текучести)
SOS - Коэффициент опасности (SEQ/STEK)
CRX(I),CRY(I) - кривизна в гориз и вертик плоскостях
ZK(J) - координаты контрольных точек вдоль трубопровода
IK(J) - номера узлов в контрольных точках
VK(J) - отметки трубы по вертикали в контрольных точках
UK(J) - отметки трубы по горизонтали в контрольных точках
CRXK(J),CRYK(J) кривизна до след контроль точки в плоскостях XZ и ZУ
DTK(J) - толщина стенки до след контроль точки
ZNN - осевое усилие (сила)
EZ - осевая деформация по участку AB
KT - количество точек замера (котрольных точек)
NN1 - минимальное количество прогонок (послед-х приближений)
NN2 - максимальное количество прогонок (послед-х приближений)
TOCH - относительная погрешность расчётов
CUV - коэффициент постели грунта в направлениях U, V
DU,DV - погрешность измерения координат трубы по гориз и вертик
XX(I),YY(I),HH(I) - абсолютные координаты всех точек
XXK(J),YYK(J),HHK(J) - абсолютные координаты контрольных точек
SS(I),SSK(J) - дистанция точек (узловых и контрольных)
147
SA,SB - дистанция начала и конца участка AB
IM-IN - участок, свободный от грунта, по номерам узлов
C
C
1
2
C
IMPLICIT REAL*8(A-H,O-Z)
DIMENSION Z(3000),U(3000),V(3000),U0(3000),V0(3000)
DIMENSION QU(3000),QV(3000),CRX(3000),CRY(3000),DT(3000)
DIMENSION SS(3000),XX(3000),YY(3000),HH(3000)
DIMENSION F(3000),XJX(3000),SFI(3000),SZ0(3000),ZNN(3000)
DIMENSION RAA(3000),AAA(3000),BBB(3000),ZK(300)
DIMENSION UK(300),VK(300),CRXK(300),CRYK(300),DTK(300)
DIMENSION SSK(300),XXK(300),YYK(300),HHK(300),IK(300)
COMMON Z,U,V,U0,V0,QU,QV,CRX,CRY,DT,SS,XX,YY,HH,F,XJX
COMMON SFI,SZ0,ZNN,RAA,AAA,BBB,ZK,UK,VK,IK
COMMON D,E,CUV,H,IA,IB,KT,IM,IN
DO 1 I=1,3000
Z(I)=0.
U(I)=0.
V(I)=0.
U0(I)=0.
V0(I)=0.
QU(I)=0.
QV(I)=0.
CRX(I)=0.
CRY(I)=0.
DT(I)=0.
SS(I)=0.
XX(I)=0.
YY(I)=0.
HH(I)=0.
F(I)=0.
XJX(I)=0.
SFI(I)=0.
SZ0(I)=0.
ZNN(I)=0.
RAA(I)=0.
AAA(I)=0.
BBB(I)=0.
CONTINUE
DO 2 J=1,300
ZK(J)=0.
UK(J)=0.
VK(J)=0.
CRXK(J)=0.
CRYK(J)=0.
DTK(J)=0.
SSK(J)=0.
XXK(J)=0.
YYK(J)=0.
HHK(J)=0.
IK(J)=0
CONTINUE
Ввод общих исходных данных
READ(1,*) SA,SB
READ(1,*) D,E,ALFA,STEK,T0,TE,P
READ(1,*) NN1,NN2,TOCH,DU,DV,CUV,H
READ(1,*) IM,IN
XNN1=NN1
XNN2=NN2
WRITE(2,100) SA,SB
WRITE(2,100) D,E,ALFA,STEK,T0,TE,P
148
WRITE(2,100) XNN1,XNN2,TOCH,DU,DV,CUV,H
WRITE(2,103) IM,IN
WRITE(2,100)
100 FORMAT(2X,30E12.4)
101 FORMAT(2X,I5,20E12.4)
103 FORMAT(2X,30I8)
204 FORMAT(1X'
WRITE(2,204)
209 FORMAT(1X'
WRITE(2,209)
205 FORMAT(1X'
WRITE(2,205)
208 FORMAT(1X'
WRITE(2,208)
207 FORMAT(1X'
WRITE(2,207)
206 FORMAT(1X'
WRITE(2,206)
WRITE(2,100)
C
Диаметр трубы:',2F9.4)
D
Предел текучести металла трубы:',2E13.4)
STEK
Температ. укладки, эксплуатации:',2F9.1)
T0,TE
Давление:',3E13.4)
P
Коэффициент постели грунта:' 4E13.4)
CUV
Шаг сетки' 4F6.1)
H
Ввод данных в контрольных точках
121 FORMAT(1X'
J XXK
YYK
HHK
*
DTK
CRXK
CRYK ')
WRITE(2,121)
J=0
4 CONTINUE
READ(1,*) M,XKK,YKK,HKK,DTKK,CRXKK,CRYKK
IF(M.LT.0) GO TO 3
J=J+1
XXK(J)=XKK
YYK(J)=YKK
HHK(J)=HKK
DTK(J)=DTKK
CRXK(J)=CRXKK
CRYK(J)=CRYKK
DTK(J)=DTKK
301 FORMAT(2X,I6,3F12.2,F13.4,2F12.6)
WRITE(2,301) J,XXK(J),YYK(J),HHK(J),DTK(J),CRXK(J),CRYK(J)
KT=J
GO TO 4
3 CONTINUE
WRITE(2,100)
122 FORMAT(1X'
J ZK(J)
UK(J)
VK(J)
*CRX(J)
CRY(J)
DT(J)
IK
SSK(J)')
WRITE(2,122)
PI=3.141592654
FI=ATAN((YYK(KT)-YYK(1))/(XXK(KT)-XXK(1)))
IF(XXK(KT).LT.XXK(1)) FI=FI+PI
FIGR=FI*180./PI
DO 14 J=1,KT
ZK(J)=+(XXK(J)-XXK(1))*COS(FI)+(YYK(J)-YYK(1))*SIN(FI)
UK(J)=(XXK(J)-XXK(1))*SIN(FI)-(YYK(J)-YYK(1))*COS(FI)
VK(J)=HHK(J)-HHK(1)
SSK(1)=ZK(1)
IF(J.EQ.1) GO TO 15
DSX=(XXK(J)-XXK(J-1))**2
DSY=(YYK(J)-YYK(J-1))**2
DSH=(HHK(J)-HHK(J-1))**2
SSK(J)=SSK(J-1)+SQRT(DSX+DSY+DSH)
15 CONTINUE
IK(J)=ZK(J)/H+10.5
149
TIK=IK(J)
WRITE(2,302) J,ZK(J),UK(J),VK(J),CRXK(J),CRYK(J),DTK(J),
*TIK,SSK(J)
302 FORMAT(2X,I5,10E14.6)
14 CONTINUE
WRITE(2,100)
305 FORMAT(1X'
FI
FIGR
ZK(1)
ZK(KT)
*
SSK(1)
SSK(KT) ')
WRITE(2,305)
WRITE(2,303) FI,FIGR,ZK(1),ZK(KT),SSK(1),SSK(KT)
303 FORMAT(2X,10E14.6)
WRITE(2,100)
C
Интерполяция данных замеров
ZA=ZK(1)
ZB=ZK(KT)
ZC=0.5*(ZA+ZB)
IA=ZK(1)/H+10.5
IB=ZK(KT)/H+10.
IC=(IA+IB)/2.
IA1=IA-1
IB1=IB+1
IA2=IA-2
IB2=IB+2
306 FORMAT(1X'
IA
IA1
IA2 IB
IB1
*
KT ')
WRITE(2,306)
WRITE(2,103) IA,IA1,IA2,IB,IB1,IB2,KT
WRITE(2,100)
WRITE(2,123)
123 FORMAT(1X'
I Z(I)
U(I)
V(I)
*
CRY(I)
DT(I)
SS(I)
F(I)
*
SFI(I)
SZ0(I)
ZNN(I)
RAA(I)
*
BBB(I)')
DO 33 I=IA,IB
Z(I)=ZA+(I-IA)*H
DO 34 J=2,KT
J1=J-1
J2=J
ZK1=ZK(J1)
ZK2=ZK(J2)
IF(Z(I).LT.ZK1) GO TO 34
IF(Z(I).GT.ZK2) GO TO 34
UK1=UK(J-1)
UK2=UK(J)
VK1=VK(J-1)
VK2=VK(J)
CX1=CRXK(J-1)
CX2=CX1
CY1=CRYK(J-1)
CY2=CY1
DT1=DTK(J-1)
DT2=DT1
SSK1=SSK(J-1)
SSK2=SSK(J)
SS(I)=SSK1+(Z(I)-ZK1)*(SSK2-SSK1)/(ZK2-ZK1)
U(I)=UK1+(Z(I)-ZK1)*(UK2-UK1)/(ZK2-ZK1)
V(I)=VK1+(Z(I)-ZK1)*(VK2-VK1)/(ZK2-ZK1)
CRX(I)=CX1+(Z(I)-ZK1)*(CX2-CX1)/(ZK2-ZK1)
CRY(I)=CY1+(Z(I)-ZK1)*(CY2-CY1)/(ZK2-ZK1)
DT(I)=DT1+(Z(I)-ZK1)*(DT2-DT1)/(ZK2-ZK1)
IB2
CRX(I)
XJX(I)
AAA(I)
150
34 CONTINUE
PI=3.141592654
R1=D/2.
R2=R1-DT(I)
F(I)=PI*(R1**2-R2**2)
XJX(I)=(R1**4-R2**4)*PI/4
SFI(I)=P*(D-2*DT(I))/(2*DT(I))
SZ0(I)=0.3*SFI(I)+ALFA*E*(T0-TE)
ZNN(I)=F(I)*SZ0(I)
RAA(I)=6.*E*XJX(I)+2.*ZNN(I)*H*H
AAA(I)=(4.*E*XJX(I)+ZNN(I)*H*H)/RAA(I)
BBB(I)=-E*XJX(I)/RAA(I)
WRITE(2,101) I,Z(I),U(I),V(I),CRX(I),CRY(I),DT(I),SS(I)
*,F(I),XJX(I),SFI(I),SZ0(I),ZNN(I),RAA(I),AAA(I),BBB(I)
33 CONTINUE
WRITE(2,101)
C
C
C
Расчёт перемещений, проверка схождения
ICP=(IB-IA)/2.
124 FORMAT ('
Прогонки - последовательные приближения')
WRITE(2,124)
116 FORMAT(1X'
XM
CC
SUM
U(ICP)
*
V(ICP)')
WRITE(2,116)
SUM=0
XM=0.
G1=0.
G2=0.
DO 8 N=1,50
CALL UV(G1,G2)
8 CONTINUE
DO 11 I=IA2,IB2
U0(I)=U(I)
11 V0(I)=V(I)
5 XM=XM+1
DO 6 M=1,10
CALL QQQ
DO 7 N1=1,10
CALL UV(DU,DV)
7 CONTINUE
6 CONTINUE
S=0
DO 9 I=IA,IB
9 S=S+ABS(V(I))+ABS(U(I))
CC=(SUM-S)*100/S
Промежуточная печать
PRINT 100,XM,CC,S,U(ICP),V(ICP)
WRITE(2,100) XM,CC,S,U(ICP),V(ICP)
SUM=S
IF(XM.GT.NN2) GO TO 55
IF(XM.LT.NN1) GO TO 5
IF (ABS(CC).GT.TOCH) GO TO 5
55 CONTINUE
Печать результатов
WRITE(2,100)
WRITE(2,102)
102 FORMAT(1X'
Результаты расчётов ')
WRITE(2,104)
SMINZ=+1.E6
SMAXZ=-1.E6
151
SMINE=+1.E6
SMAXE=-1.E6
UMIN=+1.E3
UMAX=-1.E3
VMIN=+1.E3
VMAX=-1.E3
WRITE(2,111)
111 FORMAT ('*')
DO 10 I=IA,IB
EJ=E*XJX(I)
A3U=(U(I+1)-2*U(I)+U(I-1))/(H*H)-CRX(I)
XMU=EJ*A3U
SIZGU=XMU*R1/XJX(I)
A3V=(V(I+1)-2*V(I)+V(I-1))/(H*H)-CRY(I)
XMV=EJ*A3V
SIZGV=XMV*R1/XJX(I)
SIZG=SQRT(SIZGU**2+SIZGV**2)
SZMAX=SZ0(I)+SIZG
SZMIN=SZ0(I)-SIZG
SEQMAX=SQRT(SFI(I)**2-SFI(I)*SZMAX+SZMAX**2)
SEQMIN=SQRT(SFI(I)**2-SFI(I)*SZMIN+SZMIN**2)
SEQ=SEQMAX
IF(SEQMAX.LT.SEQMIN) SEQ=SEQMIN
IF(SZMAX.GT.SMAXZ) SMAXZ=SZMAX
IF(SZMIN.LT.SMINZ) SMINZ=SZMIN
IF(SEQ.GT.SMAXE) SMAXE=SEQ
IF(SEQ.LT.SMINE) SMINE=SEQ
IF(U(I).GT.UMAX) UMAX=U(I)
IF(U(I).LT.UMIN) UMIN=U(I)
IF(V(I).GT.VMAX) VMAX=V(I)
IF(V(I).LT.VMIN) VMIN=V(I)
EQMAX=SEQMAX/E
EQMIN=SEQMIN/E
XX(I)=XXK(1)+Z(I)*COS(FI)+U(I)*SIN(FI)
YY(I)=YYK(1)+Z(I)*SIN(FI)-U(I)*COS(FI)
XX(I)=-XX(I)
YY(I)=-YY(I)
HH(I)=HHK(1)+V(I)
SOS=SEQ/STEK
104 FORMAT ('
I Z(I),
U(I),
V(I),
QU(I),
*QV(I),
SIZGU,
SIZGV,
SZMIN,
SZMAX,
*
SEQ
SFI(I)
SZ0(I)
SS(I),
XX(I)
*
YY(I)
HH(I)
CRX(I)
CRY(I)
SOS')
304 FORMAT(2X,I5,13E12.4,3F12.2,2F12.6,F7.2)
10 WRITE(2,304) I,Z(I),U(I),V(I),QU(I),QV(I),SIZGU,SIZGV
*,SZMIN,*SZMAX,SEQ,SFI(I),SZ0(I),SS(I),XX(I),YY(I),HH(I)
*,CRX(I),CRY(I),SOS
WRITE(2,111)
WRITE(2,104)
WRITE(2,100)
WRITE(2,105)
105 FORMAT (1X,'
UMIN
UMAX
VMIN
VMAX')
WRITE(2,100) UMIN,UMAX,VMIN,VMAX
WRITE(2,100)
WRITE(2,76)
76 FORMAT (1X,' SMIN SMAX (нормальное продольное min max)')
WRITE(2,100) SMINZ,SMAXZ
WRITE(2,100)
WRITE(2,77)
77 FORMAT (1X,'
SEQW MIN
MAX (эквивалентное) ')
WRITE(2,100) SMINE,SMAXE
152
21
WRITE(2,100)
CONTINUE
STOP
END
Подпрограмма уточнения реакции грунта
1
SUBROUTINE QQQ
IMPLICIT REAL*8(A-H,O-Z)
DIMENSION Z(3000),U(3000),V(3000),U0(3000),V0(3000)
DIMENSION QU(3000),QV(3000),CRX(3000),CRY(3000),DT(3000)
DIMENSION SS(3000),XX(3000),YY(3000),HH(3000)
DIMENSION F(3000),XJX(3000),SFI(3000),SZ0(3000),ZNN(3000)
DIMENSION RAA(3000),AAA(3000),BBB(3000),ZK(300)
DIMENSION UK(300),VK(300),CRXK(300),CRYK(300),DTK(300)
DIMENSION SSK(300),XXK(300),YYK(300),HHK(300),IK(300)
COMMON Z,U,V,U0,V0,QU,QV,CRX,CRY,DT,SS,XX,YY,HH,F,XJX
COMMON SFI,SZ0,ZNN,RAA,AAA,BBB,ZK,UK,VK,IK
COMMON D,E,CUV,H,IA,IB,KT,IM,IN
DO 1 I=IA,IB
DVV=V(I)-V0(I)
QV(I)=-CUV*D*DVV
DUU=U(I)-U0(I)
QU(I)=-CUV*D*DUU
CONTINUE
RETURN
END
Подпрограмма поиска равновесного положения
с соблюдением заданных ограничений
SUBROUTINE UV(DU,DV)
IMPLICIT REAL*8(A-H,O-Z)
DIMENSION Z(3000),U(3000),V(3000),U0(3000),V0(3000)
DIMENSION QU(3000),QV(3000),CRX(3000),CRY(3000),DT(3000)
DIMENSION SS(3000),XX(3000),YY(3000),HH(3000)
DIMENSION F(3000),XJX(3000),SFI(3000),SZ0(3000),ZNN(3000)
DIMENSION RAA(3000),AAA(3000),BBB(3000),ZK(300)
DIMENSION UK(300),VK(300),CRXK(300),CRYK(300),DTK(300)
DIMENSION SSK(300),XXK(300),YYK(300),HHK(300),IK(300)
COMMON Z,U,V,U0,V0,QU,QV,CRX,CRY,DT,SS,XX,YY,HH,F,XJX
COMMON SFI,SZ0,ZNN,RAA,AAA,BBB,ZK,UK,VK,IK
COMMON D,E,CUV,H,IA,IB,KT,IM,IN
H2=H*H
H3=H2*H
H4=H3*H
IA1=IA-1
IA2=IA-2
U(IA1)=2*U(IA)-U(IA+1)
U(IA2)=2*U(IA1)-U(IA)
V(IA1)=2*V(IA)-V(IA+1)
V(IA2)=2*V(IA1)-V(IA)
DO 1 I=IA,IB
EJ=E*XJX(I)
AU=U(I-1)+U(I+1)
BU=U(I-2)+U(I+2)
CKU=QU(I)*H4+H2*EJ*(CRX(I-1)-2.*CRX(I)+CRX(I+1))
U(I)=AU*AAA(I)+BU*BBB(I)+CKU/RAA(I)
IF(I.GT.IM.AND.I.LT.IN) GO TO 111
DO 11 J=1,KT
K=IK(J)
IF(I.NE.K) GO TO 11
153
U1=UK(J)-DU
U2=UK(J)+DU
IF(U(I).LT.U1) U(I)=U1
IF(U(I).GT.U2) U(I)=U2
11 CONTINUE
111 CONTINUE
AV=V(I-1)+V(I+1)
BV=V(I-2)+V(I+2)
CKV=QV(I)*H4+H2*EJ*(CRY(I-1)-2.*CRY(I)+CRY(I+1))
V(I)=AV*AAA(I)+BV*BBB(I)+CKV/RAA(I)
IF(I.GT.IM.AND.I.LT.IN) GO TO 121
DO 12 J=1,KT
K=IK(J)
IF(I.NE.K) GO TO 12
V1=VK(J)-DV
V2=VK(J)+DV
IF(V(I).LT.V1) V(I)=V1
IF(V(I).GT.V2) V(I)=V2
12 CONTINUE
121 CONTINUE
1 CONTINUE
IB1=IB+1
IB2=IB+2
U(IB1)=2*U(IB)-U(IB-1)
U(IB2)=2*U(IB1)-U(IB)
V(IB1)=2*V(IB)-V(IB-1)
V(IB2)=2*V(IB1)-V(IB)
DO 2 II=IA,IB
I=IA+IB-II
EJ=E*XJX(I)
AU=U(I-1)+U(I+1)
BU=U(I-2)+U(I+2)
CKU=QU(I)*H4+H2*EJ*(CRX(I-1)-2.*CRX(I)+CRX(I+1))
U(I)=AU*AAA(I)+BU*BBB(I)+CKU/RAA(I)
IF(I.GT.IM.AND.I.LT.IN) GO TO 211
DO 21 J=1,KT
K=IK(J)
IF(I.NE.K) GO TO 21
U1=UK(J)-DU
U2=UK(J)+DU
IF(U(I).LT.U1) U(I)=U1
IF(U(I).GT.U2) U(I)=U2
21 CONTINUE
211 CONTINUE
AV=V(I-1)+V(I+1)
BV=V(I-2)+V(I+2)
CKV=QV(I)*H4+H2*EJ*(CRY(I-1)-2.*CRY(I)+CRY(I+1))
V(I)=AV*AAA(I)+BV*BBB(I)+CKV/RAA(I)
IF(I.GT.IM.AND.I.LT.IN) GO TO 222
DO 22 J=1,KT
K=IK(J)
IF(I.NE.K) GO TO 22
V1=VK(J)-DV
V2=VK(J)+DV
IF(V(I).LT.V1) V(I)=V1
IF(V(I).GT.V2) V(I)=V2
22 CONTINUE
222 CONTINUE
2 CONTINUE
RETURN
END