Контрольная работа по геометрии
advertisement

Настоящее пособие по выполнению контрольной работы по геометрии
(Проективная геометрия) для студентов заочного отделения написано в
соответствии с действующей программой и предназначено для студентовзаочников физико-математического факультета
педагогического
университета. В пособии дается необходимый справочный материал,
приводятся подробно разработанные типовые примеры. Предлагаются задачи
для самостоятельного решения. Варианты контрольных работ приведены в
таблице.
Контрольная работа выполняется в отдельной тетради в клеточку.
Записать номер и полную формулировку задачи. К задаче выполнить
рисунок, все пояснения к задаче писать подробно.
Студент выбирает вариант, номер которого совпадает с последней
цифрой номера зачётной книжки; на контрольной работе следует написать
номер зачётной книжки.
№
варианта
0
1
2
3
4
5
6
7
8
9
Номер задания
1к
1г
1з
1б
1в
1ж
1д
1и
1е
1а
2ж
2б
2и
2в
2к
2г
2д
2е
2з
2а
3а
3и
3д
3е
3з
3в
3к
3б
3г
3ж
7
13
6
10
4
11
9
5
12
8
14г
14б
14в
14е
14а
14в
14г
14д
14а
14е
15г
15в
15б
15а
16б
16а
16а
17в
17а
17б
18е
18в
18д
18г
18а
18д
18е
18б
18б
18г
20а
21
19а
19б
19а
19б
19в
21
20б
20а
23в
26а
26б
22а
23б
26б
24б
25
23а
24а
27в
27а
27б
27е
27г
27д
27е
27ж
27г
27ж
BAРИАНТ КОНТРОЛЬНОЙ РАБОТЫ С РЕШЕНИЕМ
Квадратичные формы и квадрики
Задача № 1.
Привести к каноническому виду квадратичную форму
2
2
x1 11x 3 2 x1 x 2 4 x1 x 3 6 x 2 x 3
Решение.
Собираем слагаемые содержащие х1:
2
2
( x1 2 x1 x 2 4 x1 x 3 ) 11x 3 6 x 2 x 3 ;
В нашем случае i 1, g11 1, g12 1, g13 2 .
y1 g11 x1 g12 x 2 g13 x 3 x1 x 2 2x 3
2
2
2
2
y1 x1 x 2 4x 3 2 x1 x 2 4 x1 x 3 4 x 2 x 3 ; 1 / g11 1
Формулы перехода к новой системе координат имеют вид:
y1 x1 x 2 2 x 3
y 2 x2
, тогда квадратичная форма имеет вид в новой
3
3
y x
системе координат: y1 ( y 2 7 y 3 2 y 2 y 3 ) .
Повторим процедуру снова, рассмотрим
2
2
y 2 7 y3 2 y 2 y3 .
2
2
2
квадратичную
Сгруппируем члены, содержащие у2: ( y 2 2 y 2 y 3 ) 7 y 3
i 2, 22 1, 23 32 1 .
2
форму
2
z 2 22 y 2 23 y 3 y 2 y 3
y 2 y 3 2 y 2 y 3 2 x1 x 2 4 x1 x 3 4 x 2 x 3 ; 1 / 22 1 .
2
2
z2
2
Формулы перехода к новой системе координат имеют вид:
z 1 y1
2
2
3
z y y , тогда квадратичная форма имеет вид в новой системе
z3 y3
координат: z 2 8y 3 .
2
2
Таким образом, получили y1 z1 z 2 8z 3
канонический вид квадратичной формы.
2
2
2
2
- это и есть
Линейное
преобразование,
приводящее
квадратичную
форму
к
x1 z1 z 2 3z 3
2
2
3
каноническому виду имеют вид: x z z .
x3 z 3
От
полученного
преобразования
канонического
1
1
z u
2
2
z u
z3 1 u3
2 2
можно
вида
с
перейти
помощью
к
линейного
нормальному
виду
квадратичной формы u1 u 2 u 3 .
2
2
2
Рассмотренную выше квадратичную форму можно было привести к
каноническому виду, выделяя полные квадраты:
2
2
2
2
2
2
x1 11x 3 2 x1 x 2 4 x1 x 3 6 x 2 x 3 (2 x1 4 x1 x 3 2 x 3 ) (9 x 3 6 x 2 x 3 x 2 )
2
2
( x 2 2 x1 x 2 x1 ) 2( x1 x 3 ) 2 (3x 3 x 2 ) 2 ( x1 x 2 ) 2 .
z1 x1 x 3
2
3
2
Линейное преобразование z 3 x x
z 3 x1 x 2
также приводит данную
квадратичную форму к каноническому виду 2 z1 z 2 z 3 .
2
2
2
Таким образом, приводя квадратичную форму к каноническому виду
различными способами, можно получить разные ответы. Это следует иметь в
виду при решении примеров.
Задача № 2.
С помощью ортогональных преобразований привести к каноническому
виду квадратичную форму:
2
2
2
x 1 2 x 2 х 3 4 x1 x 2 8 x 1 х 3 4 x 2 х 3
Решение.
1) Найдем канонический вид квадратичной формы.
Рассмотрим квадратичную форму, и выпишем коэффициенты:
g11 1, g12 g 21 2, g 22 2, g 33 1, g13 g 31 4, g 23 g 32 2 ,
матрица квадратичной формы имеет вид:
2 4
1
A 2 2 2 .
4 2 1
Составим характеристическое уравнение
1
2
2
2
4
2
4
2 0,
1
найдем корни уравнения.
( 1 )2 ( 2 ) 16 16 ( 16( 2 ) 4( 1 ) 4( 1 )) 0 ,
3 27 54 0 , 3 36 9 54 0 ,
( 6 )( 6 ) 9( 6 ) 0 или ( 6 )( 3 )2 0
1 6, 2 3 3 , тогда
Квадратичная форма имеет канонический вид:
2
2
2
2
2
2
1 y 1 2 y 2 3 y 3 6 y1 3 y 2 3 y 3 .
2) Найдем базис, в котором квадратичная форма имеет канонический
вид. Запишем для данной квадратичной формы систему вида
( 1 )u 1 2u 2 4u 3 0
1
2
3
2u ( 2 )u 2u 0
1
2
3
4u 2u ( 1 )u 0
3) Найдем вектор e1 нового базиса, соответствующий собственному
значению 1 6 :
5u 1 2u 2 4u 3 0
2u 1 8u 2 2u 3 0
,
найдем
какое-нибудь
решение
системы
4u 1 2u 2 5u 3 0
1
p1 3 , нормируя его найдем
u 2, u 2 1, u 3 2 . Вектор p1 2; 1;2 ,
координатный вектор
p1 2 1 2
e1 ; ; – 1-ый собственный вектор.
p1 3 3 3
4) Найдем вектор e2 , e3 нового базиса, соответствующий собственному
значению 2 3 3 :
4u 1 2u 2 4u 3 0
2u 1 u 2 2u 3 0
, эта система эквивалентна уравнению
4u 1 2u 2 4u 3 0
2u 1 u 2 2u 3 0 ,
из которого видно что векторы e2 , e3 ортогональны найденному
вектору p1 2; 1;2 , и следовательно, вектору e1 .
Одно из решений полученного уравнения можно взять произвольно,
например, u1 1, u 2 u 3 2 .
p2 1; 2; 2 ,
Получим вектор
координатный вектор
p2 3 ,
нормируя его найдем
p2 1 2 2
e2 ; ; – 2-ой собственный вектор.
p2 3 3 3
Определим вектор p3 , координаты которого также удовлетворяют
полученному уравнению 2u 1 u 2 2u 3 0 , но он ортогонален вектору
2u1 u 2 2u 3 0
p2 1; 2; 2 , тогда 1
.
2
3
u 2u 2u 0
Найдем какое-нибудь решение системы, например, u1 2, u 2 2, u 3 1 .
Вектор p3 2;2; 1, p1 3 , нормируя его найдем координатный вектор
p3 2 2 1
e3 ; ; – 3-ий собственный вектор.
p3 3 3 3
5) Найдем ортогональное преобразование, приводящее данную
квадратичную форму к каноническому виду.
Для этого запишем выражение векторов нового ортогонального базиса
через векторы старого базиса:
2 1 2
e1 3 e1 3 e2 3 e3
1 2 2
e e e e
2 3 1 3 2 3 3.
e 2 e 2 e 1 e
3 3 1 3 2 3 3
Матрица искомого ортогонального преобразования получается при
транспонировании матрицы этой системы. Следовательно, искомое
ортогональное преобразование выражается формулами:
2
1
2
х1 3 y1 3 y 2 3 y 3
x 1 y 2 y 2 y
2 3 1 3 2 3 3
x 2 y 2 y 1 y
1
2
3
3
3
3
3
Вследствие неоднозначности выбора вектора e2 существует бесконечное
множество
ортогональных
преобразований,
квадратичную форму к каноническому виду.
приводящих
данную
Задача № 3.
Привести к каноническому виду уравнение квадрики
2
2
x1 x 2 2 x1 x 2 2 x1 2 x 2 3 0
Решение.
2
2
Рассмотрим квадратичную форму x1 x 2 2 x1 x 2 , приведем ее к
каноническому виду с помощью ортогональных преобразований. Определим
коэффициенты:
g11 1, g12 g 21 1, g 22 1 ,
1 1
.
матрица квадратичной формы имеет вид: A
1
1
1
1
0 , найдем корни
Составим характеристическое уравнение
1
1
уравнения.
(1 )(1 ) 1 0 , 2 2 0 , ( 2) 0 , 1 2, 2 0 , тогда
квадратичная форма имеет канонический вид: 1 y1 2 y 2 2y1 .
2
2
2
Найдем координатные векторы e1 и e2 новой прямоугольной декартовой
системы. Они являются собственными векторами линейного оператора,
имеющего ту же матрицу, что и данная квадратичная форма. Следовательно,
их координаты удовлетворяют системе уравнений:
(1 )u1 u 2 0
.
1
2
u (1 )u 0
u1 u 2 0
1) 1 2 , следовательно 1 2
, u1 u 2 ,
u u 0
1 1
e1
;
- 1-ый собственный вектор.
2 2
u1 u 2 0
2) 2 0 , следовательно 1 2
, u1 u 2 ,
u u 0
1 1
e2
;
- 2-ой собственный вектор.
2
2
p1 2 ,
p2 2 ,
p1 1; 1 ,
p2 1; 1 ,
Запишем выражение векторов нового ортогонального базиса через
векторы старого базиса:
1
1
e
e
e2
1
1
2
2
1
1 ,
e2
e1
e2
2
2
ортогональные преобразования имеют вид:
1 1
1
x 2 y
1 1
x 2
y
2
1 2
y
2
0
1 2 – вращение вокруг начала координат на угол 45 .
y
2
В новой системе координат уравнение квадрики перепишется:
2
2 y1 2(
2
2 y1
2
1 1 1 2
1 1 1 2
y
y ) 2(
y
y )3 0
2
2
2
2
4 2
y 3 0 ,
2
y1 2 ( y 2
2
2
2 y1 2 2 y 2 3 0 , 2 y1 2 2 ( y 2
3
2 2
)
3 2
).
4
Если подвергнуть полученную выше систему координат параллельному
y1 z 1
переносу, положив 2
3 2 , уравнение квадрики
2
y
z
4
2
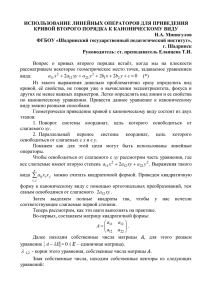
Примет канонический вид: z1 2z 2 . Квадрика является параболой.
x2
z1
z2
x1
О
o
Задача № 4
На расширенной прямой d задан проективный репер R = {A1, A2, E}
построить точку M (2, 3) по её координатам в этом репере.
Решение.
Рассмотрим V 2 – векторное пространство
порождающее прямую d :
(V 2\{ 0 }) = d .
В роли V 2 будем
рассматривать множество
направленных отрезков с
O
e1
e
e2
началом в точке O d .
Обозначим B = { e1 , e2 } –
m
базис векторного
пространства V 2,
согласованный с репером R
или векторный базис
проективного репера.
E
A1
M
A2
Решение задачи проводим по следующей схеме:
1. Восстановим векторный базис проективного
репера R = {A1, A2, E}.
Для этого возьмём любой вектор e , порождающий точку E и строим
векторы e1 и e2 , сумма которых даёт вектор e . B = { e1 , e2 } – векторный
базис проективного репера.
Векторы e1 и e2 порождают соответственно точки A1 и A2 (см. рис.).
2. Строим вектор m = 2 e1 + 3 e2 .
3. Строим точку M, порожденную
вектором m , как пересечение прямой d и
m, для которой вектор m служит направляющим.
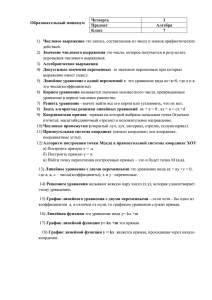
Задача № 5.
На расширенной прямой d задан проективный репер R = {A1, A2, E}.
Построить точку M(–1, 2) относительно репера R.
Решение.
1. Найдём векторный базис
e1
проективного
O
репера
R = {A1, A2, E}. Так как
e2
E – несобственная точка
прямой d , то вектор,
m
её порождающий,
является направляющим
вектором прямой d0,
M
A1
параллельной прямой d.
E
A2
Возьмем точку O d0, и векторный базис B = { e1 , e2 }, репер R: π( e1 ) = A1,
π( e2 ) = A2, π( e ) = E. (см. рис. 18).
2. Строим вектор m = – e1 + 2 e2 .
3. Точка М определяется как пересечение прямых m и d : М = m d .
Задача № 6.
На расширенной плоскости задан проективный репер
R = {A1, A2, A3, E}. Построить точку M(1, 1, 2) относительно репера R.
Решение.
Обозначим через E3 проекцию единичной точки репера R из центра A3 на
прямую A1A2. Упорядоченная тройка точек A1, A2, Е3 образует на прямой A1A2
A1
E3 = M3
E
e1
e2
e3
M
E2
m
M2
A3
A2
проективный репер R3 = {A1, A2, E3}. Относительно репера R3 проекция M3
точки M из центра A3 на прямую A1A2 имеет координаты (1, 1), то есть точка
M3 совпадает с точкой E3.
Аналогично можно ввести реперы R2 = {A1, A3, E}, R1 = {A2, A3, E} и
построить ещё одну проекцию точки М. Построим, например, точку M2
относительно репера R2.
Тогда искомая точка M находится как пересечение прямых A3M3 и A2M2
Задача № 7.
На расширенной плоскости задан проективный репер
R = {A1, A2, A3, E}, где точки A1, A2, A3 – собственные, а точка E –
несобственная. Построить точку М(1, 1, 2) по её координатам в репере R.
Решение.
Считаем, что точка E является несобственной точкой прямой d .
Строим точку E1, которая является проекцией точки E на прямую A2A3 из
точки A1. Для этого на плоскости через точку A1 проводим прямую
паралельную прямой d , которая в пересечении с прямой A2A3 даст точку E1.
Получим, что точка E1 совпадет с точкой М1.
Строим E2 = (А2E) (А1А3) и точку М2(1, 2) по её координатам в репере
R2 = {A1, A3, E2}.
Тогда точку М несложно построить как пересечение прямых
М = (A1M1) (A2M2).
Задача № 8.
Написать уравнение прямой, проходящей через точку пересечения
прямых а(2,-1,1), b(1,1,1) и точку А(2,-1,3).
Решение.
1) Запишем уравнения прямых а и b, для этого воспользуемся общим
уравнением прямой u1 x1 u2 x 2 u3 x3 0 , где (u1 , u2 , u3 ) – координаты
прямой, определяются с точностью до постоянного множителя:
уравнение прямой а(2,-1,1): 2 x1 x 2 x 3 0
уравнение прямой b(1,1,1): x1 x 2 x 3 0
2) Найдем координаты точки М – пересечения прямых а и b.
Координаты точки пересечения заданных прямых удовлетворяют системе
уравнений и определяются с точностью до постоянного множителя:
2 х1 х 2 х 3 0
1
2
3
х х х 0
Общее решение этой системы можно найти по формулам:
x1
1 1
1
1
x 2
2 ,
2 1
1 1
, x 3
2 1
1
1
3 .
Значит, координаты точки пересечения М(-2,-,3) или при =1 М(-2,-1,3).
3) Составим уравнение прямой, проходящей через точки М(-2,-1,3)
и А(2,-1,3), для этого составим определитель из координат этих точек:
x1
x2
x3
x1
x2
a1
a2
b1
b2
a 3 0 , для нашего случая 2 1
b3
2 1
x3
3 0
3
3x1 6 x 2 2 x 3 2 х 3 3х1 6 х 2 0 12 x 2 4 x 3 0
3x 2 x 3 0 – искомое уравнение прямой.
Задача № 9.
На проективной плоскости задан репер R = {A1, A2, A3, E}.
Е – проекция точки Е из центра А на прямую (АА) (, , = 1,3 ). Найти
уравнения координатных прямых (А А ) и (А Е ) относительно репера R.
Решение.
Так как точки A1, A2 имеют кооординаты A1(1, 0, 0), A2(0, 1, 0), то
уравнение прямой (A1A2) имеет вид:
х1
х2
х3
1
0
0 0
0
1
0
или х3 = 0.
Составляя соответствующие определители, аналогично получаем
уравнения двух других координатных прямых:
(А2А3): х1 = 0;
(А3А1): х2 = 0.
Составим уравнение прямой (А1Е1): u1x1 +u2x2 + u3x3 = 0.
Если точка А1 (А1Е1), то координаты этой точки удовлетворяют уравнению
прямой: u1 + u20 + u30 = 0 или u1 = 0.
Точка Е принадлежит прямой (А1Е1), и имеет координаты Е(0, 1, 1),
тогда u10 + u21 + u31 = 0 или u2 = –u3.
Уравнение прямой (А1Е1) примет вид:
u2x2 – u2x3 = 0, u2 0, т.е.
(А1Е1): х2 – х3 = 0.
Аналогично получаем уравнения прямых:
(А2Е2): х1 – х3 = 0,
(А3Е3): х1 – х2 = 0.
Задача № 10.
Построить прямую x1 + 2x2 – 2x3 = 0 по её координатам относительно
проективного репера R на расширенной плоскости.
Решение.
Для построения прямой нужно знать две её точки. Найдём эти точки,
положив x1 = 0, x2 = 1.
Тогда точка M имеет координаты (0, 1, 1). Аналогично, найдём вторую
точкупрямой N(2, 0, 1).
Построим точки М и N по их координатам относительно репера R на
расширенной плоскости. Видим, что М = Е1 – проекция точки Е из А1.
Точка N лежит на прямой А1А3,
A1
e1 О
то есть N = N2. Строим проекцию N2
N2
точки N из центра А2. Точка N2 имеет
e2
координаты (2, 1) относительно
E
репера R2 = {A1, A3, E2}. Искомая
прямая проходит через точки Е1 и N2.
A3
Е1=N
A2
1
Задача № 11.
Даны точки А(1,-1,2), В(-2,1,3), С(1,0,-5), D(-3,2,1). Доказать их
коллинеарность и найти двойное отношение точек (АВ,СD).
Решение.
1) Условие коллинеарности точек АВС есть условие компланарности
векторов
a1
1
а, b, c : b
c1
a2
a3
b2
b3 0 .
c2
c3
1
Для точек А,В,С: 2
1
2
1
3 5 3 2 10 0 .
5
1
0
1
1 2
Для точек А,В,D: 2
1
3 1 9 8 6 6 2 0 .
3
2
1
Точки А,В,С коллинеарны, точки А,В,D коллинеарны, следовательно, точки
всей четверки коллинеарны.
2) Найдем двойное отношение точек (АВ,СD) по формуле:
AB, CD
a 1 a 2 b1 b 2
c1 c 2 d 1 d 2
1
b
c
b
2
c
2
1
a
1
2
a
d
1
d2
1 1 2
1 0 3
1 1 2
3 2 1
1
2
1 ( 1 )
1
1 ( 1 ) ( 1 )
0
Таким образом, AB, CD 1.
Задача № 12.
На прямой даны три различные точки А, В, С. Построить на этой
прямой точку D, такую, что (АВ, СD) = 2.
Решение.
Возьмем на прямой репер R = {A, B, С}. Пусть точка D имеет
координаты (d1, d2) относительно репера R.
d1
Тогда ( АВ, СD) 2 = 2, отсюда d 1 = 2d2.
d
Относительно репера R точка D имеет координаты (2, 1).
Построим точку D(2, 1) на расширенной прямой.
Векторное пространство, порождающее прямую АВ можно представить
в виде множества направленных отрезков с началом в некоторой точке О не
принадлежащей прямой АВ.
а
O
b
B
A
(V2) = (АВ). Находим
d
векторный базис a , b ,
определяющий репер ( a ) = А,
с
C
D
d
( b ) = В, ( a + b ) =
С. Берем вектор с = a + b , порождающий точку
a
a
С и находим
векторы
и
,
такие
что
(
) = А, ( b ) = В и строим вектор
b
d
= 2a +
b , ( d ) = D.
Задача № 13.
Прямые а и b пересекаются в точке С, прямые с и d содержат
биссектрисы углов, образованных прямыми а и b. Доказать, что (ab,cd) = –1.
Решение.
d
A
a
C
O
B
l
b
Так как прямые с и d
содержат биссектрисы углов,
то
эти
прямые
перпендикулярны.
Проведем прямую l,
которая параллельна прямой
d.
Значит
прямая
l
перпендикулярна прямой с.
А = l а,
В = l b,
С = l с, D = l d.
Так как l с, ас –
биссектриса угла (аb), то С –
середина
отрезка
АВ.
Следовательно, (АВ, СD) = –1 и (аb, сd) = –1.
Задача № 14.
Найти координаты неподвижных точек проективного преобразования
y 1 х 1
y 2 x 2
y 3 х 1 х 3
Решение.
Точка называется инвариантной (неподвижной), если при некотором
проективном преобразовании она переходит сама в себя.
Перепишем систему следующим образом
x1 х1
x 2 x 2
x 3 х1 х 3
или
( 1 )x1 0
( 1 )x 2 0 – это линейная однородная
х1 ( 1 )х 3 0
система относительно x1 , x 2 , х 3 , которая имеет ненулевое решение тогда и
только тогда, когда ее определитель равен нулю, т. е.
1
0
0
0
1
0 0 или ( 1 )2 ( 1 ) 0 .
1
0
1
Таким образом, ненулевые решения будут при 1 1, 2 1 .
1) 1 1. Подставим полученное значение в систему найдем
x1 x 2 0, х 3 . Получим неподвижную точку А(0,0,1).
2) 2 1 . Подставим полученное значение в систему, получим
уравнение x 3 x1 х 3 .
В этом случае получаем прямую, состоящую из инвариантных точек
1
d : x 2 х 3 0 . Отметим, что точка A d .
Задача № 16.
Составить формулы преобразования проективных координат при
переходе от репера R = {A 1 , A 2 , A 3 , E} к реперу R = {A 1 , A 2 , A 3 , E},
если в репере R: A 1 (1, 0, –1), A 2 (2, 1, 0), А 3 (0, 0, 1); а) E(3, 1, 0); б)
E(1, 1, 2).
Решение.
а) Пусть a1 , a 2 , a3 – система векторов, согласованна относительно
репера R.
Пусть далее a1 , a 2 , a3 – векторный базис репера R.
( a1 ) = A 1 , a1 {1, 0, –1}; ( a 2 ) = A 2 , a 2 {2, 1, 0}; ( a3 ) = A 3 ,
a3 {0, 0, 1}.
Видим, что сумма a1 + a 2 + a3 есть вектор, порождающий точку Е:
( a1 + a 2 + a3 ) = Е.
Значит, система векторов { a1 , a 2 , a3 } согласована относительно
Найдем сумму векторов: a1 + a 2 + a3 = {3, 1, 0}.
x1 c11 y1 c12 y 2 c31 y 3
2
2 1
2 2
2 3
репера R и мы воспользуемся формулами перехода: x c1 y c2 y c3 y
x 3 c 3 y1 c 3 y 2 c 3 y 3
1
2
3
Подставив в правые части формул координаты точек A1, A2, A3, получим
искомые формулы преобразования проективных координат:
x1 y1 2 y 2
2
2
x y
.
x 3 y1 y 3
б) В этом случае сумма векторов a1 + a 2 + a3 = {3, 1, 0} не порождает
точку Е, то есть система векторов { a1 , a 2 , a3 } не согласована
относительно репера R.
Значит, нужно найти базис, определяющий репер R.
) = Е и найдем векторы
e
Обозначим e – вектор,
порождающий
точку
Е,
(
b1 = k1 a1 , b2 = k2 a2 , b3 = k3 a3 , такие, что
k1 a1 + k2 a 2 + k3 a3 = e .
Подставим в полученное равенство разложения векторов a1 , a 2 , a3 , e по
векторам базиса { a1 , a 2 , a3 }, где { a1 , a 2 , a3 } – векторный базис
проективного репера R:
a1 = a1 – a3 , a 2 = 2 a1 + a2 , a3 = a3 , e = a1 + a 2 + 2 a3 .
a1 + a2 + 2 a3 = k1( a1 – a3 ) + k2(2 a1 + a 2 ) + k3 a3 ,
Подставляем a1 , a 2 , a3 , e в полученное выражение, получим:
(k1 + 2k2) a1 + k2 a 2 + (k3 – k1) a3 = a1 + a 2 + 2 a3 .
Отсюда:
k1 k 2 1,
k1 1,
k 2 1,
k 2 1,
k k 2;
k 1.
3 1
3
То есть, b1 = – a1 , b2 = a 2 , b3 = a3 .
Матрица перехода имеет вид:
1 2 0
0 1 0 .
1 0 1
Значит, искомые формулы преобразования координат имеют вид:
x1 y1 y 3
2
2
x y
.
x 3 y1 y 3
Контрольная работа для студентов III курса з/о
1. В пространстве А2 приведите к нормальному виду уравнения следующих
квадрик, установить вид квадрики и напишите формулы преобразования
координат:
2
2
а) x1 5 x 2 4 x1 x 2 2 x1 2 x 2 2 0 ;
2
2
б) x1 7 x 2 6 x1 x 2 12 x1 28 x 2 28 0 ;
2
2
в) x1 5 x 2 2 x1 x 2 4 х1 12 х 2 8 0 ;
2
2
г) x1 x 2 2 x1 x 2 6 х1 10 x 2 25 0 ;
2
2
д) x1 5 x 2 6 x1 x 2 6 x1 2 x 2 7 0 ;
2
2
е) 2 x1 5 x 2 2 x1 x 2 4 x1 2 x 2 16 0 ;
2
2
ж) x1 x 2 2 x1 x 2 8 x1 8 0 ;
2
з) 3x1 4 x1 x 2 8 x 2 36 0 ;
2
2
и) x1 4 x 2 4 x1 x 2 8 x1 24 x 2 8 0 ;
2
2
к) 3x1 3x 2 10 x1 x 2 2 x1 14 x 2 53 0 .
2. В пространстве E 3 приведите к каноническому виду уравнения
следующих квадрик и напишите формулы преобразования координат:
2
2
2
а) 3x1 2 x 2 3x3 4 x1 x 2 2 x1 x3 4 x 2 x 3 6 0 ;
2
2
б) 2 x 2 x3 4 x1 x 2 4 x 2 x 3 6 x1 12 x 2 18 0 ;
2
2
2
в) 5 x1 5 x 2 3x 3 8x1 x 2 9 0 ;
2
г) 2 x1 x 2 x 2 2 x 2 x3 12 x 2 4 0 ;
2
2
2
д) x1 4 x 2 3x3 4 x1 x 2 2 x1 4 x 2 1 0 ;
2
2
е) 9 x1 3x 2 4 x 2 x3 24 x 2 8x3 24 0 ;
2
2
2
ж) 6 x1 2 x 2 6 x3 4 x1 x3 8x1 4 x 2 8 x3 1 0 ;
2
2
2
з) 4 x1 x 2 5 x 3 4 x1 x 2 50 x 2 10 x3 70 0 ;
2
2
2
35
и) 2 x1 3x 2 2 x 3 8 x1 x 3 4 x1 6 x 2 8 x 3 0 ;
3
12
22
32
1 2
1
2
3
к) 2 x 2 x 5x 2 x x 2 x 4 x 4 x 2 0 .
3. На расширенной плоскости задан проективный репер R. Постройте точку
М по ее координатам в этом репере:
а) R { A1 , A2 , A3 , E} , M(3, -1, 2);
б) R { A1 , A2 , A3 , E} , M(2, 3, -1);
в) R { A1 , A2 , A3 , E} , М(1, 2, 1);
г) R { A1 , A2 , A3 , E} , М(-2, -1, 1);
д) R { A1 , A2 , A3 , E} , М(-2, 1, -2);
е) R { A1 , A2 , A3 , E} , М(1, 2, 2);
ж) R { A1 , A2 , A3 , E} , М(2, 1, -1);
з) R { A1 , A2 , A3 , E} , М(1, 2, 1);
и) R { A1 , A2 , A3 , E} , М(3, -2, 1);
к) R { A1 , A2 , A3 , E} , М(2, -1, 1).
4. Найти уравнение прямой, проходящей через точку пересечения прямых
a(2,1,1) , b(1,1,1) и точку А(2 ,-1, 3).
5. Найти точку пересечения прямой l(2, -1, 1) с прямой, проходящей через
точки А(2, -1, 0) и В(3, -3, 1).
6. Найти координаты точки пересечения прямых (АВ) и (СD), если А(3, 0, -1),
В(0, 4, 2), С(-2, 1, -3), D(1, -1, 1).
7. Найти координаты точки пересечения прямых (АВ) и (СD), если А(0, 1, 1),
В(-1, 2, 1), С(3, -3, 1), D(0, 1, 0).
8. Даны четыре прямые
a : x1 x 2 x 3 0 ;
b : 2 x1 x 2 2 x3 0 ;
c : x1 x 2 x3 0 ;
d : 2 x1 x 2 2 x 3 0 .
Найти уравнение прямой, проходящей через точки a b и c d .
9. Даны четыре прямые
a : 3x1 2 x 2 x3 0 ;
b : 4 x1 x 2 0 ;
c : 2 x1 x 3 0 ;
d : x1 x 2 x3 0 .
Найти уравнение прямой, проходящей через точки a b и c d .
10.Даны четыре прямые
a : x1 x 2 4 x3 0 ;
b : x1 x 2 x3 0 ;
c : 2 x1 3x 2 x 3 0 ;
d : 5x1 x 2 3x3 0 .
Найти уравнение прямой, проходящей через точки a b и c d .
11.Даны три точки: А(0,1,-1), С(-4,2,-1), D(0,1,0) и прямая b : x1 x 2 3x3 0 .
Найти уравнение прямой, проходящей через точки А и В=b(CD).
12.Найти уравнение прямой, проходящей через точку М(2,1,-1) и точку
пересечения прямых l : 2 x1 4 x 2 x3 0 и m : x1 x 2 x 3 0 .
13.Найти уравнение прямой, проходящей через точку А(1,-2,3) и точку
пересечения прямых l : 3x1 x 2 6 x3 0 и m : x 2 4 x 3 0 .
14.Написать формулы преобразования координат, если точки A1 , A2 , A3 , E ,
определяющие репер R, имеют относительно старой системы координат
R { A1 , A2 , A3 , E} следующие координаты:
а) A1(1, 1, 0) , A2 (0, 1, 2) , A3 (1, 1, 1) , E (2, 3, 5) ;
б) A1(2, 3, 8) , A2 (3,5, 9) , A3 (7, 4, 1) , E (1, 1, 0) ;
в) A1(2, 1, 0) , A2 (0, 1, 1) , A3 (1, 1, 1) , E (1, 3, 2) ;
г) A1(2, 1, 0) , A2 (0, 1, 1) , A3 (1, 1, 1) , E (1, 1, 2) ;
д) A1(1, 0, 3) , A2 (1, 4, 0) , A3 (1, 4, 3) , E (1, 3, 2) ;
е) A1(1, 0, 1) , A2 (2, 1, 0) , A3 (0, 0, 1) , E (2, 3, 5) .
15. Даны точки А(1, 2, 4), В(5, 0, 4), С(3, 1, 4), D(2, -1, 0) в репере
R { A1 , A2 , A3 , E} . Доказать их коллинеарность и найти сложные
отношения:
а) (АВ, CD) и (DB, CA);
б) (АС, ВD) и (АD, ВС);
в) (СА, ВD) и (АВ, DC);
г) (CB, AD) и (АD, ВC).
16.Даны точки А(1, -2, 1), В(0, -1, 1), С(1, 0, -1), D(1, -1, 0) в репере
R { A1 , A2 , A3 , E} . Доказать их коллинеарность и найти сложные
отношения:
а) (АВ, CD) и (АС, ВD);
б) (DB, CA) и (АD, ВС);
в) (АВ, DC) и (АС, ВD).
17.Даны точки А(1, 0, 1), В(1, -1, 2), С(5, -2, 7), D(1, 1, 0) в репере
R { A1 , A2 , A3 , E} . Доказать их коллинеарность и найти сложные
отношения:
а) (СА, ВD) и (АD, ВC);
б) (DB, CA) и (АD, ВС);
в) (АВ, DC) и (АС, ВD).
18.Найдите неподвижные точки проективного преобразования:
y1 4 x1 x 2 ,
y1 2 x1 x 3 ,
а) y 2 6 x1 3 x 2 ,
г) y 2 x1 x 2 x 3 ,
y 3 x1 x 2 x 3 .
y 3 x1.
y1 3 x1 x 2 ,
б) y 2 4 x 3 ,
y 3 x1 3 x 2 .
y1 x1 x 2 ,
д) y 2 2 x1 ,
y 3 2 x 2 x 3 .
y1 x1 ,
y1 x 2 x 3 ,
в) y 2 x 2 ,
е) y 2 2 x1 x 2 ,
y 3 x1 x 3 .
y 3 x 3 .
19.Параболическая гомология задана центром S, осью (s) и парой точек А и А.
Постройте:
а) образ точки В, принадлежащей прямой АА;
б) образ данной прямой d;
в) образ несобственной прямой d .
20.Гиперболическая гомология задана центром S, осью (s) и парой точек А и А.
Постройте:
а) прообраз несобственной точки L данной прямой l;
б) прообраз данной прямой l ;
21.Гиперболическая гомология задана центром S, осью (s) и парой точек А и А.
На данной прямой р найти точку Х,образ которой лежит на данной прямой q.
22.Найти уравнение касательной к квадрике
2
2
а) x1 x 2 x1 x3 0 в точке А(1, 2, 3);
2
2
б) x 2 2 x3 x1 x 2 5x 2 x3 0 в точке А(1, 1, 0).
2
2
2
23.Дана линия второго порядка : x1 x 2 2 x3 4 x1 x 2 2 x 2 x3 0 .Составить
уравнение поляры точки
а) А(4, -2, 3);
б) В(0, 2, -1);
в) С(-4, 2, 1)
относительно линии .
2
2
2
24.Дана линия второго порядка : 2 x1 x 2 2 x3 6 x1 x 2 4 x 2 x 3 0 .Составить
уравнение поляры точки
а) А(2, -5, 5);
б) В(0, 2, -1)
относительно линии .
2
2
2
25.Дана линия второго порядка : 6 x1 4 x 2 x3 5x1 x 2 3x1 x3 2 x 2 x 3 0 .
Составить уравнение поляры точки А(-4, 2, 3) относительно линии .
26.Найти полюс прямой а относительно линии :
б) a(0,1,2) ,
а) a : x 2 3x3 0 ,
: x1 x 2 x 3 2 x 2 x 3 0 ;
2
2
2
: x 2 4 x1 x 3 0 .
2
27.Уравнения нижеприведенных линий второго порядка на проективной
плоскости приведите к каноническому виду и определите их проективные
классы:
2
2
2
а) 2 x1 3x 2 4 x3 2 x1 x 2 6 x 2 x 3 2 x1 x 3 0 ;
2
2
2
б) x1 3x 2 x3 4 x1 x 2 2 x 2 x3 2 x1 x3 0 ;
2
2
2
в) x1 2 x 2 x3 2 x1 x3 0 ;
2
2
г) 2 x1 x 3 2 x1 x 2 2 x1 x 3 0 ;
2
2
2
д) x1 x 2 x3 2 x1 x 2 4 x1 x3 2 x 2 x3 0 ;
2
2
2
е) x1 x 2 4 x3 2 x1 x 2 4 x1 x3 4 x 2 x3 0 ;
2
2
ж) x1 3x3 2 x1 x 2 6 x 2 x 3 2 x1 x3 0 .
СПРАВОЧНЫЙ МАТЕРИАЛ
КВАДРАТИЧНАЯ ФОРМА
( x) gij x i x j g11 x1 g 22 x 2 ... g nn x n 2 g12 x1 x 2 ...
2
g11
g
G 21
...
g
n1
2
g12
...
g 22
...
...
...
gn2
...
n
g1n
g 2n
... Матрица квадратичной формы
g nn
КАНОНИЧЕСКТИЙ ВИД КВАДРАТИЧНОЙ ФОРМЫ
(x) 1 y1 2 y 2 ... r y r
2
1
0
G
...
0
0
...
2
...
...
...
0
...
2
2
0
0
... Матрица квадратичной формы, приведенной к
r
каноническому виду
Рангом квадратичной формы называется ранг её матрицы
форма вырожденная
rg G r n
форма невырожденная
rg G r n
ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ
К КАНОНИЧЕСКОМУ ВИДУ
1. Выписываем коэффициенты квадратичной формы
1
2а. Собираем все члены, содержащие x (если g110) и выделяем полный
квадрат
( x)
1
(g 11 x1 g12 x 2 ... g1n x n )2 h( x 2 ,..., x n )
g11
1
(g 1i x i )2 h( x 2 ,..., x n )
g11
i
i
3. Выписываем формулы перехода от x к новым координатам y
y1 ( g1i x i )2
2
2
y x
1 12
............
(
x
)
y h( y 2 ,..., y n )
Получим
g11
n
n
y x
2б. Если все g ii 0 , но хотя бы один из других коэффициентов не равен
нулю (пусть g12 0 ) можно перейти к такому виду квадрики следующим
образом:
x1 z 1 z 2
x 2 z1 z 2
3
x z3
............
n
x z n
1
2
1
2
1
2
Получим ( x ) 2 g12 ( z z )( z z ) h 2 g12 z 2 g12 z ,
т.е. свели к случаю (1)
2
2
4. Аналогично с другими коэффициентами
5. Выписываем канонический вид квадратичной формы, и формулы
преобразования координат
1t1 2t 2 ... r t r
2
2
2
НОРМАЛЬНЫЙ ВИД КВАДРАТИЧНОЙ ФОРМЫ
t 1 t 2 ... t k t (k1) ... t r , где
r – ранг квадратичной формы
2
2
2
2
индекс
число отрицательных
квадратов в нормальном
виде квадратичной формы
2
сигнатура
разница между числом
положительных и
отрицательных
коэффициентов
Закон инерции
Индекс квадратичной формы не зависит от выбора базиса, в котором
квадратичная форма имеет нормальный вид
ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ
К НОРМАЛЬНОМУ ВИДУ
1. Привести квадратичную форму к каноническому виду.
1y1 2 y 2 ... r y r , где r n
2
2
2
2. От канонического вида перейти к нормальному виду
t 1 t 2 ... t k t (k1) ... t r , где k r
2
2
2
2
2
1 1
1
y
t
1
.....................
yk 1 t k
k
с помощью линейного преобразования:
y k 1 t k 1
....................
y r t r
ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ К КАНОНИЧЕСКОМУ
ВИДУ С ПОМОЩЬЮ ОРТОГОНАЛЬНЫХ ПРЕОБРАЗОВАНИЙ
i j
1. Пусть задана квадратичная форма aijx x ; i, j 1...n
Выпишем коэффициенты квадратичной формы: aij , a0i i, j 1...n .
2. Выписываем матрицу квадратичной формы
a11
a
G 21
...
a
n1
a12
...
a22
...
...
...
an2
...
a1n
a2n
...
ann
3. Составляем и решаем характеристическое уравнение
a11
a21
a12
...
a1n
a22 ...
a2 n
...
...
...
...
an1
an 2
... ann
0
4. Выписываем канонический вид квадратичной формулы
1 y1 2 y2 ... n yn
5. Выписываем формулы,
нашего оператора
по которым находим собственные векторы
(a11 )u1 a12u 2 ... a1nu n 0
1
2
n
a21u (a22 )u ... a2 nu 0
,
..................................................
an1u1 an 2u 2 ... (ann )u n 0
для каждого корня i i, 1...n
6. Выписываем формулы преобразований координат векторов
УРАВНЕНИЕ КВАДРИКИ
aijx i x j 2a0i x i a00 0,
2
i 1...n
2
1
1 2
2
1
2
п=2: a11x 2a12 x x a22 x 2a01x 2a02 x a00 0
п=3:
2
2
2
a11x1 a22 x 2 a33 x 3 2a12 x1 x 2 2a13 x1 x 3
2a23 x 2 x 3 2a01x1 2a02 x 2 2a03 x 3 a00 0
ПРИВЕДЕНИЕ УРАВНЕНИЯ КВАДРИКИ
К КАНОНИЧЕСКОМУ ВИДУ В Ап
i j
i
1. Пусть задано уравнение aijx x 2a0i x a00 0,
i 1...n
Используя преобразования координат векторов привести квадратичную
i
форму к каноническому виду: i y
2
2. Используя параллельный перенос, и преобразуя получим каноническое
уравнение квадрики.
?
ПРИВЕДЕНИЕ УРАВНЕНИЯ КВАДРИКИ К КАНОНИЧЕСКОМУ ВИДУ
i j
i
7. Пусть задано уравнение квадрики aijx x 2a0i x a00 0,
i 1...n
i j
Выпишем коэффициенты квадратичной формы aijx x : aij , a0i i, j 1...n .
8. Выписываем матрицу квадратичной формы
a11
a
G 21
...
a
n1
a12
...
a22
...
...
...
an2
...
a1n
a2n
...
ann
9. Составляем и решаем характеристическое уравнение
a11
a21
a12
...
a1n
a22 ...
a2 n
...
...
...
...
an1
an 2
... ann
0
10.Выписываем канонический вид квадратичной формулы
1 y1 2 y2 ... n yn
11.Выписываем формулы,
нашего оператора
по которым находим собственные векторы
(a11 )u1 a12u 2 ... a1nu n 0
1
2
n
a21u (a22 )u ... a2 nu 0
,
..................................................
an1u1 an 2u 2 ... (ann )u n 0
для каждого корня i i, 1...n
12.Выписываем формулы преобразований координат векторов
13.Выписываем уравнение квадрики в новой системе координат
14.Выполняем построения.
УРАВНЕНИЕ ПРЯМОЙ
НА ПРОЕКТИВНОЙ ПЛОСКОСТИ
Векторы а , b , m
b
а
порождающие точки
А( a1 , а 2 , а 3 ) , В( b1 ,b 2 ,b3 ) ,
M ( x1 , x 2 , x 3 ) – линейно зависимы,
m
т.е.
А
М
m a b
В
x1 a1 b1
x 2 a 2 b 2 – параметрические уравнения прямой
x3 a 3 b3
А( a1 , а 2 , а 3 ) В( b1 ,b 2 ,b3 ) точки, принадлежащие прямой
x1
x2
x3
a1
a2
a3 0
1
2
b
b
b
3
– уравнение прямой, проходящей через две точки
u1 x1 u2 x 2 u3 x 3 0 – общее уравнение прямой
где (u1 , u2 , u3 ) – координаты прямой, определяются с
точностью до постоянного множителя
u1
a2
a3
b2
b3
, u2
a1 a3
b1 b3
, u3
a1 a 2
b1
b2
ФОРМУЛЫ ПРЕОБРАЗОВАНИЯ ПРОЕКТИВНЫХ КООРДИНАТ
Рассмотрим на проективной плоскости два репера
R {A1 , A2 , A3 , E } – старый и R {A1 , A2 , A3 , E } – новый.
с11
1
с2
с1
3
с12
с13
с22
с23
с32
с33
с10
с20
– матрица перехода от репера R к реперу R
0
с3
Коэффициенты по столбцам – координаты точек
A1
A2
A3
E
1. Система векторов (a1 , a2 , a3 , e ) согласована относительно репера R ,
т.е. векторы a1 , a2 , a3 , e порождают вершины репера R и
е a1 a2 a3 координат
y1 c11 x1 c12 x 2 c31 x 3
2
2 1
2 2
2 3
y c1 x c2 x c3 x – формулы преобразования
y 3 c 3 x1 c 3 x 2 c 3 x 3
1
2
3
2. Система векторов (a1 , a2 , a3 , e ) не согласована относительно репера R ,
т.е. вектор е a1 a2 a3 , тогда нужно получить согласованную систему
векторов относительно R , для этого вместо векторов a1 , a2 , a3 рассмотрим
векторы b1 k1a1 , b2 k 2 a2 , b3 k3a3 , согласованные относительно
репера R : е k1a1 k2 a2 k3a3
k1с11
c01 c11k1 c12 k2 c31k3
1
2
2
2
2
c0 c1 k1 c2 k2 c3 k3 , где k1с2
k с1
c 3 c 3k c 3k c 3k
1 1
2 2
3 3
1 3
0
k 2 с12
k3с13
k 2 с22
k3с23
k 2 с32
k3с33
с10
с20
с30
матрица перехода от репера R к реперу R (столбцы матрицы согласованы)
ТРЕХВЕРШИННИК
А
Трехвершинник – фигура, состоящая
из трех точек, не лежащих на одной
прямой, и трех прямых, соединяющих
попарно эти точки.
В
С
Точки А, В, С – вершины трехвершинника
Прямые (АВ), (ВС), (АС) – стороны трехвершинника
ТЕОРЕМА ДЕЗАРГА
В
А
С
С
A
В
Пусть даны два трехвершинника таких, что прямые, соединяющие
соответствующие вершины пересекаются в одной точке S, тогда точки
пересечения соответствующих сторон лежат на одной прямой.
СЛОЖНОЕ (ДВОЙНОЕ) ОТНОШЕНИЕ
ЧЕТЫРЕХ ТОЧЕК ПРЯМОЙ
d
А
С
В
D
Рассмотрим репер R {A , В , С } ,
А, В – вершины репера, С – единичная точка, тогда Dх 1 , х 2
Сложным (двойным) отношением четырех точек называется число
х1
AB,CD 2
х
A a1 , a 2 ,
B b1 ,b 2 ,
AB, CD
C c1 ,c 2 ,
D d 1 ,d 2
a1 a 2 b1 b 2
c1 c 2 d 1 d 2
b1 b 2 a1 a 2
c1 c 2 d 1 d 2
СВОЙСТВА СЛОЖНОГО ОТНОШЕНИЯ
ЧЕТЫРЕХ ТОЧЕК ПРЯМОЙ
AB,CD ВA, CD
1
AB,CD CD, AB ;
AB,CD 1 D C ;
1
ВА ,CD
AB,CD BA, DC
AB, CD 0,
Пара точек А,В разделяет пару точек С, D, если
то
ВD
AB,CD 0
Пара точек А,В не разделяет пару точек С, D, если
AB, CD 0
СЛОЖНОЕ ОТНОШЕНИЕ ЧЕТЫРЕХ ПРЯМЫХ ПУЧКА
S
а
с
b
d
m
А
С
В
D
ab,cd AB, CD
СВОЙСТВА СЛОЖНОГО ОТНОШЕНИЯ
ЧЕТЫРЕХ ПРЯМЫХ ПУЧКА
аb,cd ba,cd
1
аb,cd cd, ab ;
1
ba ,cd
аb,cd ba, dc
ab,cd 1 d c
ab,cd 0,
то
bd
ИНВАРИАНТНЫЕ ТОЧКИ И ИНВАРИАНТНЫЕ ПРЯМЫЕ
y1 c11 x1 c12 x 2 c31 x 3
2
2 1
2 2
2 3
y c1 x c2 x c3 x
y 3 c 3 x1 c 3 x 2 c 3 x 3
1
2
3
формулы проективного
преобразования f
( c11 )x1 c12 x 2 c31 x 3 0
2 1
2
2
2 3
c1 x ( c2 )x c3 x 0 – система, определяющая
c 3 x1 c 3 x 2 ( c 3 ) x 3 0
2
3
1
инвариантные точки проективного преобразования
с11
с12
с31
2
2
2
А с1
с2
с3
– матрица системы
с3
3
3
с2
с3
1
Если RgA 2 , то инвариантные точки преобразования f
находятся из уравнения (найденное из уравнения подставляют в
1
2
3
систему и находят координаты ( x ; x ; x ) инвариантной точки )
с11
с12
с31
с12
с22
с32
с
с
с
3
1
3
2
3
3
0
Если RgA 1 , то преобразование f имеет бесчисленное число
1
1
1 2
1 3
инвариантных точек лежащих на прямой ( с1 )x с2 x с3 x 0
(прямой инвариантных точек)
ГОМОЛОГИИ
Гомология – проективное преобразование плоскости,
которое имеет прямую инвариантных точек, и
следовательно пучок инвариантных прямых.
Центр пучка – центр гомологии
Прямая инвариантных точек – ось гомологии
Гиперболическая
гомология
центр гомологии не
лежит на оси гомологии
Параболическая
гомология
центр гомологии
лежит на оси гомологии
S
s
S
s
ПОЛНЫЙ ЧЕТЫРЕХВЕРШИННИК
Полный четырехвершинник – совокупность
четырех точек общего положения и шести
прямых, попарно соединяющих эти точки
В
А
R
С
D
F
М
N
P
A, B, C, D – вершины полного четырехвершинника
АВ, BD, CD, AC, BC, AD – стороны четырехвершинника
M, N, R – диагональные точки
Диагонали – прямые, проходящие через диагональные точки
СВОЙСТВА ПОЛНОГО ЧЕТЫРЕХВЕРШИННИКА
1) На каждой стороне полного четырехвершинника имеется
гармоническая четверка точек: одна пара точек – вершины,
другая – диагональная точка и точка пересечения этой стороны с
диагональю, проходящей через две другие диагональные точки
2) На каждой диагонали полного четырехвершинника имеется
гармоническая четверка точек: одна пара точек – диагональные точки,
другая – точки пересечения сторон, проходящих через третью
диагональную точку, с данной диагональю
КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ
2
2
2
а11 x1 а22 x 2 а33 х 3 2а12 x1 х 2 2а13 x1 x 3 2а23 х 2 х 3 0
уравнение линии второго порядка
КЛАССИФИКАЦИЯ ЛИНИЙ ВТОРОГО ПОРЯДКА
Название линии
Каноническое уравнение
линии
1.
Овальная линия
x1 x 2 х 3 0
2.
Нулевая линия
x1 x 2 х 3 0
3.
Пара
действительных
пересекающихся
прямых
Пара мнимых
пересекающихся
прямых
Пара совпавших
прямых
4.
5.
2
2
2
Ранг
линии
3
2
2
2
3
2
2
2
2
2
2
x1 x 2 0
x1 x 2 0
2
x1 0
1
Уравнение касательной к кривой второго порядка
Ф1( А )x1 Ф2 ( А )x 2 Ф3 ( А )х 3 0 , где
Ф1 (A) а11 x1 а12 х 2 а13 x 3
Ф2 (A) а21 x1 а22 х 2 а23 x 3
Ф3 (A) а31 x1 а32 х 2 а33 x 3
ПОЛЮС И ПОЛЯРА
Билинейная форма
( X,Y) а11 x y а12 x1 y 2 а13 х1 y 3 а21 x 2 y1 а22 x 2 y 2
1 1
а23 x 2 y 3 а31 x 3 y1 а32 х 3 y 2 а33 x 3 y 3 0
Точка В проективной плоскости называется сопряженной
точке А относительно линии второго порядка, если ( А, В) 0
Полярой точки А называется
множество точек проективной
плоскости, сопряженных точке
А относительно линии.
Точка А называется
полюсом поляры
Уравнение поляры точки А
Ф1( А )x1 Ф2 ( А )x 2 Ф3 ( А )х 3 0 , где
( x1 ; x 2 ; x 3 ) – координаты текущей точки прямой
Ф1 (A) а11 x1 а12 х 2 а13 x 3
Ф2 (A) а21 x1 а22 х 2 а23 x 3
Ф3 (A) а31 x1 а32 х 2 а33 x 3