[Название документа] [ПОДЗАГОЛОВОК ДОКУМЕНТА] [Год] ИЛЬЯ ПОЛИТОВ
advertisement

[Год]
[Название документа]
[ПОДЗАГОЛОВОК ДОКУМЕНТА]
ИЛЬЯ ПОЛИТОВ
SPECIALIST REPACK | [Адрес организации]
1
Исходные данные
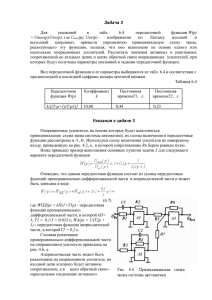
Структурная схема.
Передаточные функции звеньев неизменяемой части системы.
𝑊дв (𝑆) =
𝐾му
𝐾дв
; 𝑊му (𝑆) =
; 𝑊эу (𝑆) = 𝐾эу ; 𝑊пр (𝑆) = 𝐾пр
2
𝑇дв 𝑆 + 𝑆
𝑇му 𝑆 + 1
Требования к качеству процессов управления.
1) Допустимая ошибка в установившемся режиме eуст.
2) У управляемой переменной y(t) при единичном импульсном воздействии и Н.Н.У.:
a. Допустимое время регулирования tр.
b. Допустимое перерегулирование σ
Числовые данные.
𝐾дв
гр
= 10 [ с ] ; 𝑇дв = 1.2[𝑐]; 𝐾му = 7[−]; 𝑇му = 0.3[с]; 𝐾пр = 2[с];
В
𝑔̇ уст = 50 [
гр
] ; 𝑒уст = 0.5[гр]; 𝑡р.д. = 3.5[с]; 𝜎 доп = 30%
с
Задание.
1) Записать ДУ, рассчитать и построить временные динамические характеристики звеньев
неизменяемой части системы, а также все виды частотных характеристик этих звеньев.
2) Определить наименьший потребный коэффициент передачи электронного усилителя Кэу из
условия обеспечения допустимой ошибки.
3) Выяснить возможность обеспечения требуемой точности в установившемся режиме без
введения корректирующих устройств путем определения диапазона измерения Кэу из
условия устойчивости. При этом воспользоваться критерием Гурвица.
4) Провести синтез линейной САУ методом ЛЧХ при заданной точности в установившемся
режиме из условия обеспечения заданных показателей качества переходной функции в
режиме управления 𝒕р ≤ 𝒕р.д. , 𝝈 ≤ 𝝈доп . Выбрать принципиальную схему технической
реализации корректирующего устройства и рассчитать ее параметры.
5) Построить переходную функцию по управляемой переменной и определить
действительные показатели качества в режиме управления.
6) Построить импульсную переходную функцию по управляемой переменной в режиме
𝒚(𝒕)
стабилизации и определить ее показатели качества у𝒎𝒂𝒙 ; 𝒕р = |у
𝒎𝒂𝒙 |
≤ ∆, ∆= 𝟎. 𝟎𝟓 ∗
|у𝒎𝒂𝒙 |
7) Сделать выводы о степени соответствия синтезированной системы требованиям качества.
2
1 задание. Расчет характеристик звеньев.
1.1.
Приемник
𝑊пр (𝑆) = 𝐾пр = 0.2
a) Звено является безынерционным.
b) Составим дифференциальное уравнение приемника:
𝑌(𝑠)
𝑊пр (𝑆) =
⇒ 𝑌(𝑆) = 𝑊пр (𝑆) ∗ 𝑈(𝑆)
𝑈(𝑆)
c) Перейдем во временную область:
y(t) = 𝐾пр ∗ 𝑢(𝑡) = 0.2 ∗ 𝑢(𝑡)
d) Переходная функция приемника:
0,
𝑡<0
ℎ(𝑡) = 𝐾пр ∗ 1(𝑡) = 0.2 ∗ 1(𝑡), 1(𝑡) = {
1,
𝑡≥1
e) Импульсная переходная функция
dh(t)
k(t) =
= 𝐾пр ∗ 𝛿(𝑡) = 0.2 ∗ 𝛿(𝑡)
dt
f) Амплитудно-фазовая характеристика
𝑊(𝑗𝜔) = Кпр = 0.2
g) Вещественная и мнимая части АФХ
𝑃(𝜔) = Кпр = 0.6; 𝑄(𝜔) = 0
h) Амплитудно-частотная характеристика
А(ω) = √𝑃2 (ω) + 𝑄 2 (ω) = 𝐾пр = 0.2
i) Фазово-частотная характеристика
𝜙(𝜔) = 𝑎𝑟𝑐𝑡𝑔
𝑄(𝜔)
=0
𝑃(𝜔)
j) Логарифмические Амплитудная и Фазовая характеристики
L(ω) = 20 ∗ log(𝐾пр ) = 20 ∗ log(0.2) = −0.7
𝜑(𝜔) = 0
3
4
5
1.2.
Магнитный усилитель
𝑊му (𝑆) =
𝐾му
𝑇му 𝑆+1
=
7
0.3∗𝑆+1
a) Звено является безынерционным.
b) Составим дифференциальное уравнение приемника:
𝑌(𝑠)
7
𝑊му (𝑆) =
⇒ 𝑌(𝑆) =
∗ 𝑈(𝑆) ⇒ 𝑌(𝑆) ∗ 0.3 ∗ 𝑆 + 𝑌(𝑆) = 7 ∗ 𝑈(𝑆)
𝑈(𝑆)
0.3 ∗ 𝑆 + 1
c) Перейдем во временную область:
dy
0.3 ∗ + y(t) = 7 ∗ 𝑢(𝑡)
dt
d) Переходная функция приемника:
ℎ(𝑡) = 𝐾му ∗ (1 − 𝑒
−
𝑡
𝑇му
−𝑡
) = 7 ∗ (1 − 𝑒 0.3 ) = 7 − 𝑒 −3.33𝑡
e) Импульсная переходная функция
𝑡
𝐾му
7 −𝑡
−
k(t) =
∗ 𝑒 𝑇му =
𝑒 0.3 = 23.3 ∗ 𝑒 −3.33𝑡
𝑇му
0.3
f) Амплитудно-фазовая характеристика
𝐾му
7
𝑊(𝑗𝜔) =
=
𝑇му ∗ jω + 1 0.3 ∗ 𝑗𝜔 + 1
g) Вещественная и мнимая части АФХ
𝐾му
𝐾му 𝑇му 𝜔
7
2.1𝜔
𝑃(𝜔) = 2 2
=
; 𝑄(𝜔) = 2 2
=−
2
𝑇му 𝜔 + 1 0.09𝜔 + 1
𝑇му 𝜔 + 1
0.09𝜔 2 + 1
h) Амплитудно-частотная характеристика
2
А(ω) = √𝑃2 (ω) + 𝑄 2 (ω) = √(
2
𝐾му
𝐾му 𝑇му 𝜔
+
=
)
(
2 𝜔2 + 1
2 𝜔 2 + 1)
𝑇му
𝑇му
𝐾му
2 𝜔2
√1 + 𝑇му
=
7
√1 + 0.09𝜔 2
i) Фазово-частотная характеристика
𝜙(𝜔) = 𝑎𝑟𝑐𝑡𝑔
𝐾му
2
𝑇му 𝜔 2 +
𝑄(𝜔)
= 𝑎𝑟𝑐𝑡𝑔
𝑃(𝜔)
(
1
𝐾му 𝑇му 𝜔
2 𝜔2 + 1
𝑇му
= −𝑎𝑟𝑐𝑡𝑔(𝑇му ∗ 𝜔) = −𝑎𝑟𝑐𝑡𝑔(0.3𝜔)
)
j) Логарифмические Амплитудная и Фазовая характеристики
L(ω) = 20 ∗ log
𝐾му
√1 + 𝑇2му 𝜔2
= 20 ∗ log
7
√1 + 0.09𝜔2
(
)
𝜑(𝜔) = −𝑎𝑟𝑐𝑡𝑔(𝑇му ∗ 𝜔) = −𝑎𝑟𝑐𝑡𝑔(0.3𝜔)
6
7
8
9
1.3.
Электродвигатель
𝑊дв (𝑆) =
𝐾дв
𝑇дв 𝑆 2 +𝑆
=
10
1.2∗𝑆 2 +𝑆
a) Звено является безынерционным.
b) Составим дифференциальное уравнение приемника:
𝑌(𝑠)
10
2
𝑊дв (𝑆) =
⇒ 𝑌(𝑆) =
∗ 𝑈(𝑆) ⇒ 𝑌(𝑆) ∗ 1.2 ∗ 𝑆 + 𝑌(𝑆) ∗ 𝑆 = 10 ∗ 𝑈(𝑆)
𝑈(𝑆)
1.2 ∗ 𝑆 2 + 𝑆
c) Перейдем во временную область:
𝑑 2 𝑦 dy
1.2 ∗ 2 +
= 10 ∗ 𝑢(𝑡)
𝑑𝑡
dt
d) Импульсная переходная функция
−𝑡
𝑡
10
𝑇дв ) = 10(1 − 𝑒 −1.2 )
k(t) = 𝐿−1 {𝑊дв (𝑆)} = 𝐿−1 {
}
=
𝐾
(1
−
𝑒
дв
2
1.2 ∗ 𝑆 + 𝑆
e) Переходная функция
𝑡
𝑡
−𝑡
ℎ(𝑡) = ∫ 𝑘(𝑡)𝑑𝑡 = ∫ 𝐾дв (1 − 𝑒 𝑇дв ) 𝑑𝑡 = 𝐾дв [𝑡 − 𝑇дв (1 − 𝑒
0
𝑡
−
𝑇дв )]
𝑡
= 10 (𝑡 − 1.2 (1 − 𝑒 −1.2 ))
0
f) Амплитудно-фазовая характеристика
𝐾дв
10
𝑊(𝑗𝜔) =
=
−𝑇дв ω + 𝑗𝜔 −1.2𝜔 + 𝑗𝜔
g) Вещественная и мнимая части АФХ
𝐾дв ∗ 𝑇дв
𝐾дв
12
12
𝑃(𝜔) =
=
;
𝑄(𝜔)
=
=
−
2 𝜔2)
2 𝜔2)
−(1 + 𝑇дв
−(1 + 1.44𝜔 2 )
𝜔(1 + 𝑇дв
𝜔(1 + 1.44𝜔 2 )
h) Амплитудно-частотная характеристика
А(ω) = √𝑃2 (ω) + 𝑄2 (ω) = √(
𝐾дв ∗ 𝑇дв
2
) +(
−(1 + 𝑇2дв 𝜔2 )
𝐾дв
2
) =
𝜔(1 + 𝑇2дв 𝜔2 )
𝐾дв
2 𝜔2
𝜔√1 + 𝑇дв
=
10
𝜔√1 + 1.44𝜔 2
i) Фазово-частотная характеристика
𝐾дв
𝑄(𝜔)
𝜔(1 + 𝑇2дв 𝜔2 )
1
𝜙(𝜔) = 𝑎𝑟𝑐𝑡𝑔
= 𝑎𝑟𝑐𝑡𝑔
=
−𝑎𝑟𝑐𝑡𝑔
(
) = −𝑎𝑟𝑐𝑡𝑔(0.83𝜔)
𝐾дв ∗ 𝑇дв
𝑃(𝜔)
𝑇дв 𝜔
2
( −(1 + 𝑇дв 𝜔2 ) )
j) Логарифмические Амплитудная и Фазовая характеристики
L(ω) = 20 ∗ log (
𝐾дв
𝜔√1 + 𝑇2дв 𝜔2
𝜑(𝜔) = −
) = 20 ∗ log
10
𝜔√1 + 1.44𝜔2
𝑝𝑖
1
𝑝𝑖
− 𝑎𝑟𝑐𝑡𝑔 (
) = − − 𝑎𝑟𝑐𝑡𝑔(0.83𝜔)
2
𝑇дв 𝜔
2
10
11
12
13
2 задание. Определение наименьшего значения Kэу.
Рассмотрим систему без корректирующего устройства:
Задающее воздействие имеет вид: 𝑔(𝑡) = ̇ 𝑔0 + 𝑔𝑡
Передаточная функция разомкнутой системы: 𝑊раз (𝑆) = 𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
П.Ф. замкнутой системы, относительно задающего воздействия:
Ф𝑦𝑔 (𝑆) =
𝑊раз (𝑆)
𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
𝑌(𝑆)
=
=
(𝑆)
(𝑆)𝑊
(𝑆)𝑊
(𝑆)𝑊
(𝑆)
1 + 𝑊раз
1 + 𝑊пр
𝐺(𝑆)
му
эу
дв
П.Ф. замкнутой системы, относительно ошибки:
Ф𝑒𝑔 (𝑆) =
1
𝐺(𝑆) − 𝑌(𝑆)
=
= 1 − Ф𝑦𝑔 (𝑆)
1 + 𝑊раз (𝑆)
𝐺(𝑆)
Тогда, П.Ф. разомкнутой системы будет иметь вид:
𝑊раз (𝑆) =
𝐾пр 𝐾му 𝐾эу 𝐾дв
𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1)
Таким образом, П.Ф. замкнутой системы относительно ошибки:
1
Ф𝑒𝑔 (𝑆) =
1+
𝐾пр𝐾му 𝐾эу 𝐾дв
𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1)
=
𝑆(𝑇дв𝑆 + 1)(𝑇му 𝑆 + 1)
𝑆(𝑇дв𝑆 + 1)(𝑇му 𝑆 + 1) + 𝐾пр 𝐾му 𝐾эу 𝐾дв
Разложим Ф𝑒𝑔 (𝑆) в Ряд Тейлора:
Ф𝑒𝑔 = 𝐶0𝑔 + 𝐶1𝑔 +
𝐶0𝑔 = Ф𝑒𝑔 (𝑆)|𝑠=0 ; 𝐶1𝑔 =
𝐶2𝑔 2
𝐶𝑛𝑔 𝑛
𝑆 +. . +
𝑆 , где:
2!
𝑛!
𝑑Ф𝑒𝑔 (𝑆)
𝑑𝑆
|
; 𝐶2𝑔 =
𝑠=0
Изображение ошибки: 𝐸(𝑆) = 𝐶0𝑔 𝐺(𝑆) + 𝐶1𝑔 𝑆 ∗ 𝐺(𝑆) +
Во временной области: 𝑒𝑔0 (𝑡) = 𝐶0𝑔 𝐺(𝑡) + 𝐶1𝑔
𝑑2 Ф𝑒𝑔 (𝑆)
𝑑𝑔(𝑡)
𝑑𝑡
+
В данном системе: 𝑔̇ уст = 𝑐𝑜𝑛𝑠𝑡 ⇒ 𝑔̈ = 𝑔⃛ =. . = 𝑔𝑛 = 0
𝐶2𝑔
2!
𝑑𝑆2
;…
𝑠=0
𝑆2 𝐺(𝑆) + ⋯
𝐶2𝑔 𝑑2 𝑔(𝑡)
2!
|
𝑑𝑡 2
+⋯
14
Следовательно, уравнение ошибки имеет вид: 𝑒𝑔0 (𝑡) = 𝐶0𝑔 𝐺(𝑡) + 𝐶1𝑔
𝑑𝑔(𝑡)
𝑑𝑡
Найдем коэффициенты ошибок:
𝐶0𝑔 =
𝐶1𝑔 =
𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1)
𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1) + 𝐾пр 𝐾му 𝐾эу 𝐾дв
𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1)
𝑑
(
)|
𝑑𝑆 𝑆(𝑇дв 𝑆 + 1)(𝑇му 𝑆 + 1) + 𝐾пр 𝐾му 𝐾эу 𝐾дв
=
𝑠=0
|
= 0;
𝑠=0
𝐾пр 𝐾му 𝐾эу 𝐾дв
1
=
2
(𝐾пр 𝐾му 𝐾эу 𝐾дв )
𝐾пр 𝐾му 𝐾эу 𝐾дв
Таким образом, установившаяся ошибка:
𝑒уст =
𝐾дв
𝑔̇
𝐾пр 𝐾му 𝐾эу 𝐾дв
гр
= 10 [ с ] ; 𝑇дв = 1.2[𝑐]; 𝐾му = 7[−]; 𝑇му = 0.3[с]; 𝐾пр = 0.2[с];
В
𝑔̇ уст = 50 [
гр
] ; 𝑒уст = 0.5[гр]; 𝑡р.д. = 3.5[с]; 𝜎 доп = 30%
с
Следовательно, коэффициент передачи электронного усилителя:
𝐾эу =
𝑔̇
, где: 𝑔̇ уст = 50; 𝑒уст = 0.5; 𝐾дв = 10; 𝐾му = 7; 𝐾пр = 0.2
𝐾пр 𝐾му 𝐾дв ∗ 𝑒уст
̇
𝐾эу =
50
= 7.14
0.2 ∗ 7 ∗ 10 ∗ 0.5
Таким образом наименьший потребный коэффициент передачи электронного
усилителя: 𝑲эу = 𝟕. 𝟏𝟒
15
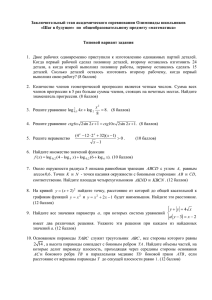
3 задание. Определение возможности не введения к.у.
Структурная схема системы без корректирующего устройства:
Передаточная функция разомкнутой системы: 𝑊раз (𝑆) = 𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
Передаточная функция замкнутой системы:
𝑊з (𝑆) =
𝐾пр𝐾му 𝐾эу 𝐾дв
𝑊раз (𝑆)
𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
=
=
3
1 + 𝑊раз (𝑆) 1 + 𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆) 𝑇му 𝑇дв 𝑆 +𝑇му 𝑆2 +𝑇дв 𝑆2 + 𝑆 + 𝐾пр𝐾му 𝐾эу 𝐾дв
Характеристическое уравнение замкнутой системы:
𝐴(𝑆) = 𝑇му 𝑇дв 𝑆 3 +𝑇му 𝑆 2 +𝑇дв 𝑆 2 + 𝑆 + 𝐾пр 𝐾му 𝐾эу 𝐾дв
𝐴(𝑗𝜔) = −𝑇му 𝑇дв 𝑗𝜔3 − 𝑇му 𝜔2 − 𝑇дв 𝜔2 + 𝑗𝜔 + 𝐾пр 𝐾му 𝐾эу 𝐾дв = −0.36𝑗𝜔3 − 0.3𝜔2 + 𝑗𝜔 + 14𝐾эу
𝐴(𝑗𝜔) = (−0.3𝜔2 + 14𝐾эу ) + 𝑗(−0.36𝜔3 + 𝜔)
𝐴(𝑗𝜔) = 0.36𝑆 3 + 0.3𝑆 2 + 1𝑆 + 14𝐾эу
Вещественная и мнимая части частотной характеристики замкнутой системы:
P(ω) = −0.3ω2 + 14𝐾эу = 0; ⇒ 14𝐾эу = 0.3ω2 ; ⇒ 𝐾эу = 0.0214𝜔2
3
𝑄(𝜔) = −0.36𝜔 + 𝜔 = 0 ⇒ 𝑄(𝜔) = 𝜔(1 − 0.36𝜔
2)
𝜔2 =
=0⇒
1
=2.778
0.36
𝜔1 = +1.667
{𝜔2 = −1.667
𝜔3 = 0
0.0214 ∗ 0
0
𝐾эу = {
={
0.0214 ∗ 2.778
0.059
Составим определитель Гурвица:
𝑎2
∆= |𝑎3
0
𝑎0
𝑎1
𝑎2
0.3 14𝐾эу
0
0 | = |0.36
1
0
0.3
𝑎0
0
0 |
14𝐾эу
∆1 = 0.3 > 0
∆2 = 0.3 ∗ 1 = 0.36 ∗ 14𝐾эу ≥ 0
∆3 = 14𝐾эу ∗ (0.3 − 5.04𝐾эу )
0.3 ≥ 14𝐾эу ∗ 0.36 → 𝑲эу ≤ 𝟎. 𝟎𝟓𝟗𝟓𝟐𝟗
Таким образом, максимальный коэффициент передачи электронного усилителя: 𝐾эу = 0,0595
16
Следовательно, диапазон изменения 𝐾эу, при котором система сохраняет устойчивость:
𝐾эу [0. .0.0595].
Максимально возможный коэффициент передачи электронного усилителя равный 𝐾эу = 0,0595 в
120 раз меньше минимального необходимого, найденного в пункте «2» и равный 7.14. Это
означает, что без введения корректирующего устройства невозможно достигнуть необходимой
точности системы, сохранив ее устойчивость.
Установившаяся ошибка при максимально возможном коэффициенте передачи электронного
усилителя: 𝑒уст =
𝑔̇
𝐾пр 𝐾му 𝐾эу 𝐾дв
0.5
0.5
= 0.2∗0.0595∗10∗7 = 0.833 = 0.60024 [гр]
4 задание. Синтез линейной САУ.
Построим переходную функцию САУ без корректирующего устройства, при Кэу=0.0595 (значение
из диапазона, при котором система сохраняет устойчивость).
Тогда передаточная функция системы примет вид:
𝑊(𝑆) =
𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
1 + 𝑊пр (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
=
𝐾пр 𝐾му 𝐾эу 𝐾дв
3
2
2
𝑇му 𝑇дв 𝑆 +𝑇му 𝑆 +𝑇дв 𝑆 + 𝑆 + 𝐾пр 𝐾му 𝐾эу 𝐾дв
=
0.36𝑆 3
0.833
+ 1.5𝑆 2 + 𝑆 + 0.833
Показатели качества системы:
𝑡р = 13.5 [c] –Время регулирования.
𝜎=
13.5−1
∗
1
100% = 28% -перерегулирование.
Данная система хоть и устойчива, но обладает плохими показателями качества, не
удовлетворяющими заданным требованиям: 𝑡р = 3.5 [c].
17
Для того чтобы САУ удовлетворяла заданным требованиям необходимо увеличить 𝐾эу до 7.14 ,
однако, такая система будет неустойчива. Для сохранения устойчивости надо ввести
корректирующее устройство. Для получения передаточной функции КУ проведем синтез САУ
методом ЛЧХ при заданной точности.
Построим ЛАХ нескорректированной системы:
𝐾пр 𝐾эу 𝐾му 𝐾дв
𝑊раз (𝑆) = 𝑆(𝑇
дв 𝑆+1)(𝑇му 𝑆+1)
– передаточная функция исходной САУ.
Пусть 𝐾пр 𝐾эу 𝐾му 𝐾дв = 𝐾 , где 𝐾эу = 7,14 (из пункта 2), тогда: 𝐾 = 7.14 ∗ 0.2 ∗ 7 ∗ 10 = 100
Тогда передаточная функция исходной САУ:
𝑊и (𝑆) =
100
𝑆(1.2𝑆 + 1)(0.3𝑆 + 1)
1) Низкочастотный участок ЛАХ:
НЧ асимптота имеет наклон −20 дб⁄дек ,так как присутствует интегрирующее звено. На
частотах ωдв и ωму наклон увеличивается на −20 дб⁄дек.
𝜔дв =
1
1
1
1
=
= 0.833; 𝜔му =
=
= 3.333
𝑇дв 1.2
𝑇му 0,3
Так как шкала частот логарифмическая: log(𝜔дв ) = −0.079; log(𝜔му ) = 0.523
НЧ асимптота с наклоном −20 дб⁄дек пересечет ось ординат в точке 20 log(𝐾) = 40дб.
5 задание. Переходная функция h(t).
В режиме управления возмущающее воздействие отсутствует, т.е. f=0.
18
𝑊(𝑆)
Ф𝑦𝑔 (𝑆) = 1+𝑊(𝑆) – передаточная функция системы по управляемой переменной.
𝑊 (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
пр
𝑊(𝑆) = 1+𝑊
ку (𝑆)𝑊му (𝑆)𝑊эу (𝑆)𝑊дв (𝑆)
𝑊пр (𝑆) = 0.2;
- передаточная функция замкнутой системы, где:
𝑊му (𝑆) =
7
;
0.3𝑆 + 1
𝑊эу (𝑆) = 7.14;
𝑊дв (𝑆) =
10
𝑆(1.2 + 1)
𝑊ку (𝑆) =
Для построения переходной функции воспользуемся системой компьютерной математики
MATLAB.
Ф𝑦𝑔 (𝑆) =