МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение высшего образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
ОЭИ
ИШНКБ
11.03.04 «Электроника и наноэлектроника»
«ПРОЕКТИРОВАНИЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА»
ИНДИВИДУАЛЬНАЯ РАБОТА №1
Вариант – 10
по дисциплине:
Проектирование деталей и узлов для космической промышленности
Выполнили:
Студенты группы
группы
Проверил:
Ст. преподаватель
ОЭИ, ИШНКБ
1А92
Евграфов Константин Иванович
Токмурзиев Исатай Муратулы
Зарницын Александр Юрьевич
Томск – 2022
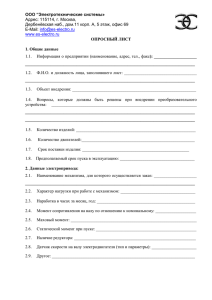
Задание: На основании тахограммы и нагрузочной диаграммы
электропривода (рисунок 1):
1.
Выбрать подходящий электродвигатель постоянного тока
2.
Составить математическую модель электродвигателя
3.
Реализовать математическую модель в Simulink
4.
Синтезировать и настроить ПИД – регулятор
Рисунок 1 – тахограмма и нагрузочная диаграмма электропривода
2
1. Расчёт и выбор электродвигателя постоянного тока
Условие варианта №29:
𝜔1 = 𝜔6 = 150
𝜔уст = 250
рад
с
рад
с
𝑀1 = 45 Н ∙ м
𝑀2 = 45 Н ∙ м
𝑀3 = 40 Н ∙ м
𝑀4 = 5 Н ∙ м
𝑀5 = 226 Н ∙ м
𝑀6 = 226 Н ∙ м
𝑀9 = −226 Н ∙ м
𝑀13 = 21 Н ∙ м
𝑡ц = 50 сек.
На основе анализа диаграмм на рисунке 1 была определена длительность
временных промежутков t1 – t0:
𝑡1 − 4% = 2 с
𝑡2 − 5% = 2,5 с
𝑡1 − 8% = 4 с
𝑡1 − 55% = 27,5 с
𝑡1 − 8% = 4 с
𝑡1 − 5% = 2,5 с
3
𝑡1 − 4% = 2 с
𝑡1 − 11% = 5,5 с
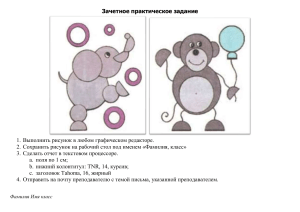
Рисунок 2 – скоростная диаграмма электропривода
𝜔уст = 250
рад
с
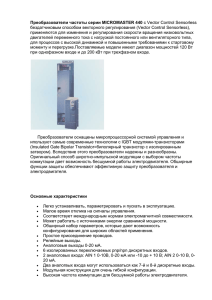
Рисунок 3 – диаграмма моментов электропривода
4
Рисунки 2 и 3 были получены путём изменения диаграмм на рисунке 1 под
данные 10 варианта.
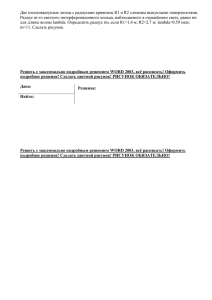
Рисунок 4 получен путём умножения скоростной диаграммы на
диаграмму моментов электропривода, так как:
𝑃 =𝑀∙𝜔
Рисунок 4 – диаграмма мощности электропривода.
Номинальная мощность рассчитываемого электродвигателя должна быть
больше
средневзвешенной
мощности
электропривода
Средневзвешенная мощность Pср.взв равна:
𝑃ср.взв =
∑𝑆
𝑡ц
5
на
рисунке
4.
где ΣS – общая площадь фигуры, ограниченная диаграммой мощностью
и осью абсцисс;
tц – общее время = 50 с.
∑ 𝑆 = 𝑆1 + 𝑆2 + 𝑆3 + 𝑆4 + +𝑆5 + 𝑆6 + 𝑆7 + 𝑆8
𝑆1 = 0,5 ∙ 2 ∙ 1500 = 1500
𝑆2 = 750 ∙ 2,5 = 1875
𝑆3 = 6000 ∙ 4 + 0,5 ∙ 4 ∙ 4000 = 32000
𝑆4 = 1250 ∙ 27,5 = 34375
𝑆5 = 7500 ∙ 4 + 0,5 ∙ 5000 ∙ 4 = 30000 + 10000 = 40000
𝑆6 = 750 ∙ 2,5 = 1875
𝑆7 = 0,5 ∙ 150 ∙ 2 = 150
𝑆8 = 0
𝑃ср.взв =
∑ 𝑆 111775
=
= 2,2355 кВт
𝑡ц
50
𝑃ном > 𝑃ср.взв
Номинальный момент двигателя должен быть не меньше максимального
момента на рисунке 3.
𝑀ном ≥ |𝑀𝑚𝑎𝑥 | ≥ 226 Н ∙ м
Номинальная угловая скорость определяется по формуле:
𝜔ном ≥
𝑃ср.взв 13118 Вт
≥
≥ 58 рад/с
𝑀𝑚𝑎𝑥 226 Н ∙ м
Частота вращения двигателя должна быть не меньше:
6
𝑓𝑚𝑖𝑛 =
58
рад
∙ 60 с
с
= 554,3 об/мин
2𝜋
Был выбран двигатель 2ПФ160LУХЛ4 [1].
Рисунок 5 – технические характеристики двигателя
Характеристики электродвигателя:
Номинальная угловая скорость 𝜔н =
Номинальный момент 𝑀н =
Номинальный ток 𝐼н =
R = 0.044
𝑃н
𝜂𝑈н
𝑃н
𝜔ном
=
=
2𝜋𝑓н
60
100 000
157
100 000
0,895∗220
7
=
2∗3,14∗1500
60
= 637 Н ∙ м
= 508 А
= 157
рад
с
L = 0.78 мГн
Использование редуктора 2,55 момент до 249 Н*м, угловая скорость
400 рад/с (3821 об/мин)
2. Моделирование двигателя
Уравнение якорной цепи двигателя:
𝑑𝑖я (𝑡)
+∙ 𝑅я ∙ 𝑖я (𝑡) + 𝐸(𝑡)
𝑑𝑡
где Uя(t) – напряжение, подаваемое на якорь электродвигателя, Lя –
𝑈я (𝑡) = 𝐿я
индуктивность якорной обмотки, iя(t) – ток в обмотке якоря, Rя – сопротивление
цепи якоря, E(t) - ЭДС в якорной цепи.
Общее уравнение движения электропривода:
𝑀вр (𝑡) − 𝑀т (𝑡) = 𝐽
где
𝑀вр (𝑡) = 𝑀н =
𝑃н
𝜔
𝑑𝜔(𝑡)
,
𝑑𝑡
– вращающий момент,
𝑀т (𝑡) – тормозящий момент,
J – момент инерции,
ω(t) – угловая частота вращения вала двигателя.
Уравнение вращающего момента:
𝑀вр (𝑡) = 𝐶𝑚 ∙ Ф ∙ 𝑖я (𝑡),
где
𝑀вр (𝑡) – вращающий момент,
𝐶𝑚 =
𝑀н
𝐼н
– механическая постоянная двигателя,
Ф = const – магнитный поток,
𝑖я (𝑡) – ток в обмотке якоря.
𝐶𝑚 =
𝑀н 249 Н ∙ м
Н∙м
=
= 0,49
𝐼н
508 А
А
Уравнение ЭДС в цепи якоря:
𝐸(𝑡) = 𝐶𝑒 ∙ Ф ∙ 𝜔(𝑡),
где
𝐸(𝑡) – ЭДС в якорной цепи,
8
𝐶𝑒 =
𝑈н −𝐼н ∙𝑅я
𝜔н
– электромеханическая постоянная двигателя,
Ф = const – магнитный поток,
ω(t) – угловая частота вращения вала двигателя.
𝐶𝑒 =
𝑈н − 𝐼н ∙ 𝑅я 220 − 508 ∙ 0,044
В
=
= 0,494
𝜔н
400
рад/с
Составим систему уравнений:
𝑑𝑖я (𝑡)
𝑈я (𝑡) = 𝐿я
+ 𝑖я (𝑡) ∙ 𝑅я + 𝐶𝑒 ∙ 𝜔(𝑡)
𝑑𝑡
{
𝑑𝜔(𝑡)
𝐶𝑚 ∙ 𝑖я (𝑡) = 𝑀𝑇 (𝑡) + 𝐽
𝑑𝑡
Получаем систему дифференциальных уравнений:
𝑑𝑖я (𝑡) 𝑈я (𝑡) − 𝑖я (𝑡) ∙ 𝑅я − 𝐶𝑒 ∙ 𝜔(𝑡)
=
𝑑𝑡
𝐿
𝑑𝜔(𝑡) 𝐶𝑚 ∙ 𝑖я (𝑡) − 𝑀𝑇 (𝑡)
=
{
𝑑𝑡
𝐽
Рисунок 6 – модель двигателя постоянного тока в Simulink
3. Синтез системы управления на основе ПИД – регулятора
Далее добавим в модель систему управления на основе ПИД – регулятора
и проведём её базовую настройку. Составим схему управления отклонению и
подадим на вход системы следующие данные:
9
Угловую скорость ωуст = 400 рад/с (из ТЗ) подадим на вход ПИД-
регулятора;
Номинальный момент МН = Н∙м будет воздействовать на двигатель;
Модель системы управления на основе ПИД – регулятора представлена
на рисунке 7.
Рисунок 7 – модель двигателя с ПИД-регулятором
10
Рисунок 8 – настройка переходных процессов ПИД-регулятора
Рисунок 9 – коэффициенты ПИД-регулятора
11
Рисунок 10 – угловая скорость двигателя с ПИД –регулятором при
номинальной нагрузке
Рисунок 11 – выходное напряжение ПИД-регулятора
Как видно по рисункам 10 и 11, ПИД – регулятор справляется со своей
функцией – стабилизирует скорость вращения двигателя на уровне ωуст = 250
рад/с. На рисунке 10 видно, что стабилизация меньше чем за 3 с. Также видно,
что при запуске двигатель выходная характеристика плавно достигает конечного
значения.
Рисунок 11 соответствуют выходному напряжению ПИД-регулятора.
12
4. Настройка ПИД – регулятора под заданное воздействие
Подадим заданное значение угловой скорости на вход ПИД-регулятора с
диаграммы на рисунке 2. Также подадим на двигатель моменты с диаграммы на
рисунке 3. Для этого перенесём диаграммы с рисунков 2 и 3 в блок Signal Builder.
Рисунок 12 – модель двигателя с ПИД регулятором
Рисунок 13 – окно блока Signal Builder для задаваемой угловой скорости
13
Рисунок 14 – окно блока Signal Builder для нагрузочного момента
Рисунок 15 – выходная угловая скорость двигателя
14
Рисунок 16 – диаграмма тока якоря
Рисунок 17 – диаграмма выходного напряжения ПИД-регулятора
15
Рисунок 18 – диаграмма мощности
Можно сделать вывод, что при заданной нагрузочной характеристике
двигатель, управляемый за счет ПИД-регулятора, смог стабилизировать
скорость работы, т.к. выходная диаграмма угловой скорости совпадает с
задаваемой характеристикой.
16
Заключение
В ходе выполнения данного задания был проведены расчёт и выбор
электродвигателя постоянного тока, а также моделирование электродвигателя и
системы управления на основе ПИД-регулятора в среде Matlab Simulink.
Результаты моделирования и симуляции работы двигателя при заданной
нагрузке
продемонстрировали,
что
ПИД-регулятор
действительно
стабилизирует угловую скорость двигателя на требуемом значении.
17
Список использованной литературы.
1.
Батяев А. А., Русанов А. В. Выбор электродвигателя постоянного
тока по мощности и расчет переходного процесса пуска: Метод указания к
выполнению расчетно-графической работы для студентов всех спец. СПб.:
СПбГУНиПТ, 2000. 20 с.
18