Емельянов - MSTUCA
advertisement

Введение.
Проблема электромагнитного взаимодействия (ЭМВ) радиоэлектронного
оборудования (РЭО) является одной из составных частей более общей задачи
обеспечения электромагнитной совместимости
(ЭМС) оборудования,
функционирующего с заданным уровнем качества в условиях огромного
частотного, временного и территориального ресурсов. Необходимо отметить
тот факт, что задачи оценки и анализа ЭМВ РЭО связаны с практической
деятельностью специалистов в области информационной безопасности
телекоммуникационных систем.
Взаимосвязь проблем ЭМВ РЭО с информационной безопасностью
ЗТКС
В поле зрения вопросов ЭМО РЭО попадают задачи, связанные с
обеспечением функционирования оборудования с заданными показателями в
условиях воздействия непреднамеренных электромагнитных помех (НЭМП).
Успешное разрешение этих задач позволяет обеспечить достоверность и
точность формируемой и передаваемой информации, ее целостность. Однако
эти же вопросы лежат и в сфере задач обеспечения информационной
безопасности.
Кроме этого, ЭМВ РЭО в значительной степени определяется не только
характеристиками штатных режимов работы, но и наличием нежелательных
каналов передачи и приема информационных сообщений. В тоже время, эти
каналы являются возможным источником получения информации
несанкционированным способами как неумышленно, так и злоумышленными,
т.е. позволяют осуществить перехват информации. Наряду с этим знание
особенностей электромагнитного взаимодействия различных видов и типов
радиоэлектронного оборудования позволяет разработать меры парирующего
характера на организационном и техническом уровнях, создавая условия
обеспечения нормального функционирования использования средств и, как
следствие, повышенной степени информационной безопасности ТКС.
К наиболее существенным причинам необходимости обеспечения
современного функционирования РЭО можно отнести следующие:
-рост числа одновременно действующих радиотехнических устройств;
-повышение мощности радиопередающих устройств;
-расширение полосы частот, используемые многими радиосредствами;
-увеличение загрузки радиочастотного диапазона несмотря на то, что
многие его участки в настоящее время сильно перегружены;
-нарастающая скорость внедрения автоматизированных систем
управления и контроля на основе современной элементной базы, вы частности
микропроцессов и ЭВМ;
3
-рост оснащенности средствами пилотажно – навигационных комплексов
различных типов воздушных судов;
-рост плотности размещения РЭО, дислоцированных на ограниченных
территориях;
Так например, за последние годы число РЭО, используемых в отрасли,
возросло в 1.3…1.5 раза. Диапазон же используемых частот ограничен и
охватывает область от 100кГЦц до 38 ГГц, причем в этом диапазоне работает и
ведомственные РЭО.
В результате опережающего роста числа РЭО и необходимых для них
радиочастот по сравнению с темпами освоения новых участков
радиочастотного спектра в настоящее время ощущается недостаток в
радиочастотах практически во всей основной части радиочастотного диапазона.
Это приводит к неизбежности работы РЭО на совмещенных или смежных
радиочастотах, а в последствие объективно существующего технического
несовершенства РЭО, обусловленного у приемных и передающих устройств
помимо основных (рабочих) также неосновных частотных каналов излучения и
приема, к воздействию излучений одних РЭО на приемное устройство других.
Способность РЭО функционировать совместно и одновременно с другими
средствами при возможном действии непреднамеренных помех и не создавая
при этом недопустимых помех другому РЭО называется электронной
совместимостью.
Помимо вышеизложенных, проблем обеспечения ЭМС РЭС гражданской
авиации имеет свои специфические особенности:
-использование РЭО для обеспечения безопасности полетов воздушных
судов;
-высокая концентрация РЭО на объектах ГА;
-строгое регламентирование частот и неспособность быстро
адаптироваться к электромагнитной обстановке;
-Радио доступность для всех ВС, находящихся в зоне УВД.
Очевидно что наличие непреднамеренных электромагнитных помех
(НЭМП) и отмеченных особенностью наряду с ограниченностью ресурсов сред
в пространственном расположении, во времени и полосе частот негативно
сказываются на обеспечении ЭМС. Из-за доступности пространства вводу и
извлечения электромагнитной энергии создается сложная ЭМО. Сущность
разрешения проблемы ЭМС представляется в виде схемы, приведенной на рис.
В.1 [1].
4
Сначала проводиться оценка ЭМО, в результате которой определяется
детерминированные и вероятностные характеристики полезных и мешающих
сигналов, взаимодействующих на приемно – анализирующие тракты
радиоэлектронных систем. Причем степень взаимодействия НЭМП на качество
функционирования РЭС, а через них на качество функционирования
радиоэлектронных комплексов (РЭК), рассматриваются отдельно. После
данных исследований становится возможным проведение собственно оценки
ЭМС. Данный подход универсален по отношению к РЭО, а также объектам и
локальным группировкам различных типов.
Воздействии помех на РЭС приводит к снижению достоверности выдачи
информации и, как следствие, к снижению точности определения
местоположения ВС. При этом возможны ошибочные решения диспетчирами
службы движения или летным составом, что приводит к конфликтным
ситуациям. Изменения уровня безопасности воздушного движения, пропускной
системы УВД снижает качество воздушного движения. В табл. В.1 приведена
статистические данные [2], позволяющие проанализировать характер
конфликтных ситуаций (КС).
Табл.В.1
Причинные факторы возникновения КС по вине РЭС.
Группы
Причинные
факторы
Ошибки Средства
пилотов связи и РЛС
Средства
авиационной
связи
Отдельные факторы
Общее
число
инцидент
ов
Неправильное опознавание
Ошибочное расшифрование изображения
на экране индикатора
9
12
Подача ошибочной команды
8
Искажение смысла радиотелефонных
переговоров
10
Искажение информационных сигналов
12
Неправильное сообщение о
местоположение.
7
Неправильное сообщение о ситуации
8
5
Ошибки Средства РЛС Помехи
диспет- и РНС
Отсутствие изображения на экране
чера
Нечеткое изображение
Нечеткая яркость при отказе индикатора
Погрешность РНС в оценке
местоположения
Неиспра Средства
вности
связи БРЭО
Систем Наземные (н)
РЛС и РНС
БРЭО НРЭО
18
11
2
26
9
15
8
Неправильная техническая эксплуатация
15
18
Очевидно что из множества конфликтных ситуаций К, представляющихся
в виде K K ( i , bi ,..., Z i ,... ) , где i , bi ,..., Z i ,... причинные факторы возникновения КС
по вине РЭС, можно выделить группу, допустим Z i , определяемую НЭМП.
Тогда Z i K можно сделать вывод что Z i 9.1% от К.
Известно [3], что положение отметки от цели на экране индикатора типа
«дальность - азимут» определяется с некоторой ошибкой, случайно
изменяющейся во времени. ЕЕ величина складывается из погрешности R(t)
измерения дальности до цели и (t ) установление азимута цели. При условии
нормальности и коррелированности стационарных случайных процессов.
Определяющих погрешность, их совместная плотность вероятности равна:
W ( R, )
1
2 R 1 k 2
EXP
1
R 2 2kR 2
(
) ,
2(1 k ) 2 r2 r 2
(В.2)
где k – нормальная корреляционная функция процессов.
Эллипс неопределенности, описывающий положения цели, определяется
следующим выражения (В.1), т.е.
2
1
R 2 2kR 2
(
)
1 k 2 r2 r 2
(В.3)
В свою очередь, вероятность того, что отметка цели не выйдет за пределы
эллипса, равна:
P(l l ý ) 1 EXP(2 / 2).
(В.3)
Очевидно, что НЭМП, воздействующее на РЭС, изменяют отношение
сигнал - помеха, точнее сигнал/(помеха + шум) и, следовательно, изменяют R
и .
6
Исходя из технологии УВД при выдерживании правил полетов по
приборам очевидно, что точностные характеристики РЛС будут определять не
только величину, оцениваемую соотношением (В.3), но и самолетовождения.
Зададим траекторию движенияч ВС относительно линии курса с
помощью упрощенной системы управления [4]:
Z V U
K j j 0
2
,
(В.4)
где
Z боковое отклонение от линии курса.
-отклонение текущего курса ВС от s
j – угол курса.
U -боковая составляющая ветра.
K j -передаточное число
Выбираем в качестве параметра уравнения движения ВС угол курса j.
Тогда закон уравнения можно в виде:
(В.5)
где i и jz - передаточные коэффициенты по курсу и скорости отклонения
в боковой плоскости движения.
Погрешности измерения представи в виде
ÐÀÑ (t ) ÔÀ (t ) (t ) ,
(В.6)
где ÔÀ (t ) - флюктуационная составляющая измерений,
- составляющая, характеризующая медленные изменения
(t )
погрешности.
В [7] показано, что
j i j z Z ,
__
(t ) T0TH1 (t i t ) BSin[ (t i t ) ],
(В.7)
где TH - интервал наблюдения,
T0 - интервал для которого заданы характеристики.
С учетом (В.6) и (В.7) запишем(В.5) в виде
j (t ) i [РАС (t k ) РАС ( ) i z
Z (t )],
(В.8)
__
где t k (k 1, N ) - момент изменения азимута РАС (t k ) ВС,
РАС () - случайные ошибки измерений, обусловленные НЭМП;
ÐÀÑ
Z (t ) - скорость линейного отклонения от лини курса при условии, что
, , имеют нормальное распределение с нулевыми средними, после ряда
7
соответствующих преобразований математическое ожидания процессов и
Z.
Имеем
U i
ÐÀÑ )[1 EXP(Vk j i z t )],
V Viz
U
i
M [ Z (t )] ( 2 ÐÀÑ ) EXP(Vk j i z t 1) (i / i z )ÐÀÑ (å),
Vk j i z VK j i z
M [(t )] (
(В.9)
(В.10)
где V – путевая скорость ВС.
На рис. В.2 и В.3 представлены зависимости погрешности
самолетовождения, определяемые погрешностью РЛС, вызванными, в свою
очередь, НЭМП.
Рис. В.2. Зависимость погрешности выдерживания угла курса в
зависимости от ошибок РЛС
Рис.В.3. Зависимость отклонения от линии заданного пути в зависимости
от погрешности РЛС
Для оценки пропускной способности зоны УВД используется временная
модель загруженности диспетчера, в которой функции диспетчера
представляется ограниченным числом элементарных операций, каждая из
которых требует определенных временных затрат [5,6].
Tçàä TÑÂ TÐÀ TÂÇ TÃÐ TÍÝä T ÄÎÏ
(В.11)
TÑÂ - время ведения радиотелефонной связи «земля борт земля»;
8
TÐÀ - время получения информации с индикатора РЛС;
TÂÇ - время ведения наземной связи по приему и передачи ВС;
TÃÐ - время ведения графического контроля;
TÍÝä время на обслуживание потока ВС при нарушении норм продольного,
бокового и вертикального эшелонирования соответственно;
TÄÎÏ - время получения внепланового потока сообщений.
Загрузка диспетчера характеризуется показателем загруженности,
определяемым отношением времени, затраченного непосредственно на
управление потоком ВС, к общему ресурсу рабочего времени
K3
Tçàä
.
T ðàá
(В.12)
На основании многочисленных экспериментов установлено что минимум
ошибочных действий достигается при K 3MAX = 0,5 и K 3MIN =0.1
Средние время затрачиваемое диспетчером УВД на управление одним ВС
при существующей технологии определяется выражением:
îá nÑ t cd nÐË t ÐË nÂÇt cÂÇ n ÃÐt ÃÐ
t ÑÂ t iÑÂ t ni
(В.12)
t iÑÂ - длительность i -го сеанса связи «земля борт земля»;
t n - длительность паузы между сообщениями;
t ÐË - время получения информации об одном ВС с индикатора РЛС;
t ÂÇ - время воздействия с другими диспетчерами;
t ÃÐ - время ведения графика;
n - количество технических операций.
Экспериментальное исследование, проведенное рядом авторов,
показывает, что длительность связи t iÑÂ описывается распределением Эрланга
третьего и четвертого порядка f (t ) 0.1At  e Ct , где А,В,С – коэффициенты,
значение которых зависит от сложности УВД.
Средняя длительность радиотелефонной связи «земля-борт» и «борт земля»
__
t СВ 7.3 0.2 , для РЦ;
__
t СВ 6.4 0.15 , для ДПП,
где
(В.13)
Mca
: Мса – максимальное число связей диспетчера УВД
12
Из выражения (В.13) видно, что средняя длительность связи «земля-бортземля»в зоне РЦ составляет 11-12 с, а в зоне подхода 9-10 с.
Общее количество сообщений nÑÂ ,на одно ВС в зонах РЦ может иметь
значение от 3 до 5, а зонах подхода от 4 до 6.
Время получения информации с индикатора РЛС при вероятности
обнаружения цели, равной единице, определяется выражением
9
t РЛ ( / C )( / K n ) ,
где - угол обзора воздушного пространства
C - угловая скорость обзора;
K n t n / t 0 - коэффициент усиливающий запоминающие свойства
индикатора;
t n - время памяти индикатора;
t 0 - коэффициент, определяемый условиями освещения рабочего места
диспетчера.
Величина n ÐË независимо от зоны УВД имеет значение от 3 до 4
Средняя длительность наземной связи по приему и передачи ВС, как
показали экспериментальное исследование, в зависимости от количества ВС,
находящихс я под управлением диспетчера (N), имеет вид:
t ÂÝ 1 EXP(N )
(В.15)
,
где - коэффициент, который для центральных и юго-западных районов
страны равен 0.066, а для северо-западных районов 0,053
Среднее количество выходов на связь n ÂÝ равно 2 .
Время, затраченное диспетчером на ведение графика t ÃÐ 3...4c, при
n ãð 2.
Воздействии помех на радиотелефонную связь приводит к увеличению
времени передачи информации, которое определяется выражением:
t ÑÂ
60V0
( A) ,
C0
(В.16)
где V0 - требуемый объем передаваемой информации;
C0 - скорость передачи информации, соответствующая
требуемому уровню разборчивости;
( A) - коэффициент, учитывающий увеличение продолжительности
радиотелефонной связи при ухудшении разборчивости речи.
По радио телефону каналу, имеющую фразовую разборчивость А, должен
быть передан объем V0 . Поскольку A 1 , то не все фразы будут приняты
правильно, в результате чего возникнут переспросы передачи. Поэтому объем
сообщений, фактически переданный по радиотелефонному каналу VÑÐ , будет
больше первоначального объема на величину VÏÎÒ VÑÐ V0 и зависит от
разборчивости фраз.
Из-за переспросов
1 A
V ÏÎÒ V0 (
),
A
(В.17)
Ухудшение разборчивости речи сказывается и на уменьшение скорости
передачи информации. Можно считать, что эта зависимость подчиняется
психофизиологическому закону Вебера – Фекнера, который гласит, что
«прирост ощущения пропорционален логарифму отношения раздражения». В
10
данном случае раздражителем является разборчивость речи, изменение
скорости передачи информации определить т.е.
(В.18)
C0 Ci K lg A0 K lg Ai K lg A j
где
К – коэффициент пропорциональности;
А0 – эталонная фразовая разборчивость (А0=1)
В соответствие с ГОСТ 16600-72 при А=0.9 происходит срыв связи, т.е.
Сi=0.
Тогда К=-21,85С0, а
Ci C0 ( I 21.85 lg A)
(В.19)
Выражение для длительности связи в зависимости от фразовой
разборчивости речи записывается в виде
t ÑÂ
60VÑÐ 60V0
1
ÑI
C0 A(1 21.85 lg A) ,
(В.20)
Воздействие непреднамеренных помех на РЛС приводит к увеличению
времени, затраченного диспетчером на радиолокационный контроль, которое
определяется выражением:
(В.21)
TÐË t ÐË ,
где
(lg( 1 Ðîá ))
lg( 1 P0)
- число оборотов, необходимое для обнаружения
целей;
Роб – вероятность обнаружения, здания в ТЗ(ТТЗ) на радиолокатор.
Число воздушных судов, которое может находиться под управлением,
определяется выражением:
N
60 K Ý
(B.22)
,
Зависимости показателей качества функционирования от отношения
сигнал/шум на входе радиоприемников РЭО УВД определяется на основе
преобразований смеси сигнала, помехи и шума в тракте радиоприемников. При
этом должны учитываться особенности построения радиоприемников и виды
воздействующих помех. Приведенные соотношения и необходимые
экспериментальные исследования позволяют определить зависимость
пропускной способности УВД от НЭМП.
11
Вопросы для самопроверки
1. Какова специфика, проблем ЭМС РЭО ГА?
2. В чем состоит сущность разрешаемой проблемы ЭМС?
3. Как изменяется точность определения координат ВС в случае воздействия
помех?
4. Каким образом помеховые воздействия сказываются на точности
самолетовождения?
5. Охарактеризуйте временную модель загруженности диспетчера.
6. К чему приводит воздействие помех на радиотелефонную связь?
7. На что влияет ухудшение разборчивости речи?
8. Как сказывается ухудшение ЭМО на пропускную способность зоны УВД?
12
1.
ОСНОВНЫЕ ПОНЯТИЯ И ХАРАКТЕРИСТИКИ ЭМС РЭО.
1.1. Классификация электромагнитных полей.
Электромагнитной
помехой
(ЭМП)
называется
нежелательное
воздействие электромагнитной энергии, которое ухудшает (или или может
ухудшать) качество функционирования РЭО. Радиопомеха – ЭМП,
соответствующая диапазону 9кГц … 3000ГГц.
Радиоэлектронные средства работают в условиях воздействия на них
ЭМП различной природы. Указанные помехи различны по происхождению,
структуре, спектральным и временным характеристикам. Они могут быть
естественного или искусственного происхождения. В общем случае (за
исключением внутрисистемных помех) помеховый сигнал представляет собой
стороннее воздействие на информационный сигнал, препятствующее передаче,
приёму и обработке сообщения.
Классификация помех по происхождению представлено на рисунке 1.1.
Помехи
Внешни
е
Внутренн
ие
Активны
е
Пассивн
ые
Активны
е
Пассивн
ые
1.Помехи
мешающих
радиостанций
2.Атмосферн
ые
3.Космически
е
4.Радиопроти
водействие
1.Помехи,
обусловленные
изменением
условий
распространения
2.Помехи
радиопротиводей
ствия (отражения
в воздухе:
«антенны»,
«фольга» и т.п.)
1.Помехи
электронных
приборов
2.Шумы
резисторов
3.Шумы
антенн
4.Активные
компоненты
оборудования
(L,C)
1.Изменение
параметров
элементов
устройства,
вызванные
изменениями
внешней и
внутренней среды
функционировани
я
Рис. 1.1. Классификация помех по происхождению
По своей природе помехи делятся:
Детерминированные (могут быть представлены мнгновенные значения)
13
Случайные
Для описания помех чаще всего используются следующие законы
распределения:
1. Гауссовский
2. Негауссовские – Релея, Лапласа, Вейбулла и др.
Путями воздействия помех являются:
электрические магнитные поля;
электрические статические поля;
магнитные статические поля;
акустические поля;
гальваническое воздействие.
По взаимодействию сигнала и помехи рассматриваются две модели:
1. аддитивная (для активной помехи):
2. мультипликативное воздействие:
Большая часть из вышеупомянутых помех может рассматриваться в виде
следующих моделей (классификация по физико-статическим признакам):
1. Флюктуационная.
2. Импульсная (сосредоточенная во времени).
3. Квазиимпульсная.
4. Сосредоточенная по спектру («придельная»).
5. Пассивная.
Заметим, что приведённые модели удобно представлять в виде
реализации Марковского случайного процесса.
1.2. Характеристики излучения радиопередающих устройств.
Шумовое радиоизлучение. Одним из наиболее распространённых видов
излучения ПРД является шумовое излучение. Интересно, что при анализе ЭМС
функционирования воздушной радио связи на зарегистрированных 436 случаев
нарушений радиосвязи около 30% составили помехи шумовых радиоизлучений.
Источниками шума в ПРД являются. По существу, все элементы схемы. Шум,
вызванный хаотическим движением свободных электронов называют
тепловым. Его спектр простирается до мм-волн, а спектральная плотность,
существенно зависит от температуры элементов схемы и мало зависит от
частоты, незначительно понижаясь с её увеличением. Для всех частот до смдиапазона включительно спектральная плотность мощности теплового шума
равна
где r - сопротивление в Ом;
k - постоянная Больцмана;
T – абсолютная температура в град.
Флюктуации протекающего через активный элемент тока, связанные с его
дискретной природой и нерегулярностью последовательного движения
14
электронов внутри элемента, являются дробоным шумом, разновидность
которого – фликкерный шум, наблюдается на частотах ниже 10 кГц.
Для электронных ламп
где e – заряд электрона,
I0 – среднее значение тока,
- коэффициент дисперсии,
- угол пролёта электронов,
- частота,
- время пролёта участка анод-катод;
= 0,1… 0,2 – для триодов и пентодов.
Для ламп, работающих на участках
где
- ширина спектра.
Для исключений шумовых помех присвоение рабочих частот
производится с большим разносом частот каналов приёма и передачи.
Шумовое радиоизлучение ПРД ряда служб нормируется. Норма мощности
этого излучения (Nш) устанавливается на относительный уровень спектральной
мощности шума Рш,с в полосе частот
, смещённой от основной частоты на
величину расстройки
, где
по отношению к средней
мощности основного излучения Р0, т.е.
Так, например уровень шума однополосного радиотелеграфного ПРД при
отстройке от частоты основного излучения на 15% не должен превышать
значение – 140 дБ.
Побочные излучения. Эти колебания ПРД характерны для всех без
исключения конструкций и в ряде случаев являются основной причиной
возникновения НЭМП.
Основными механизмами возникновения нежелательных радиоизлучений
на гармониках на выходе усилителей и генераторов являются:
возбуждение выходных резонаторов или колебательных контуров
соответствующей гармоникой тока носителей зарядов в электронном
приборе;
генерация колебаний на гармониках за счёт взаимодействия в замедляющих
системах
электровакуумных
прибор
(ЭВП)
гармоник
тока
с
электромагнитным полем соответствующей частоты;
15
усиление колебаний на гармониках, возникших в предшествующих каскадах
ПРД.
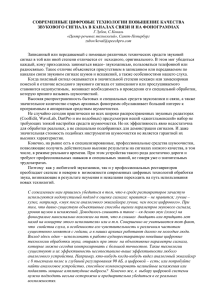
Разброс уровней гармоник (рис. 1.1) на выходе активных элементов
составляет 20 … 25 дБ. Основной причиной этого явления является влияние
разброса технологических и конструкционных параметров, нестабильности
элементов связи с антенно-фидерным трактом на интенсивность нелинейных
взаимодействий и частотную избирательность элементов связи.
Рис. 1.1. Уровень гармонических составляющих на выходе
транзисторного усилителя
Первый механизм является как характерным для всех без исключения
усилительных генераторных каскадов, так и определяющим в узкополосных
системах (коэффициент перекрытия по частоте νf ≤ 2) – клистроны, ЛОВ, ЛБВ,
ЭВП, П/П и т.д. Необходимость поддержания высокого к.п.д. в перечисленных
устройствах приводит к использованию пульсирующего тока носителей заряда
(оптимальная группировка электронов, отсечка и т.п.). В режиме к.п.д. → max
уровень f02 составляет -3 … -5 дБ. С целью уменьшения уровней колебаний на
гармониках соответствуют селективные свойства выходных каскадов,
оптимизируют взаимодействие электронного потока с электромагнитным
полем, совершенствуют конструкцию элементов связи и т.д. Комплексные
меры позволяют снизить уровни колебаний гармоник до -60 … -70 дБ.
Второй механизм является определяющим в ЛБВ типа 0 или М, имеющим
спиральные замедляющие системы. Синхронность скоростей электромагнитной
волны с f02 (реже f03) со скоростью электронов в пучке приводит к передаче
энергии волне на удвоенной частоте. Снижение дисперсии замедляющей
системы, увеличение погрешности магнитного поля в её конце позволяют
снизить уровень 2-й гармоники на 10 … 15 дБ. Эффективным средством
является обеспечение интерференции сигнала на выходе при подаче на вход
ЛБВ частоты f02 с соответствующими параметрами амплитуды и фазы.
16
Последний механизм характерен только для широкополосных
усилителей, каскады которых работают практически в линейном режиме.
Основной метод борьбы – применение ФНЧ или использование усилительной
цепочки с коэффициентом перекрытия по частоте каждого литера не более 2.
Комбинационные излучения. В одночастотном режиме работы каскадов
усилителя мощности ПРД число комбинационных колебаний и их
спектральный состав определяются структурной схемой образования рабочей
частоты и переноса на эту частоту информационного сигнала, рис. 1.2.
С позиции ЭМС наиболее рациональна схема с модулируемым
автогенератором (АГ), изображённая на рис. 1.2 а, которая в принципе
позволяет исключить комбинационные колебания. К ней близка и схема с
ФАПЧ (рис. 2.2 б), фильтрующие свойства которой позволяют не только
исключить возникновение новых комбинационных составляющих, но и
обеспечивать значительное подавление комбинационных составляющих,
возникших в предшествующих каскадах.
Рис. 1.2. Схема образования рабочих частот
Схема со смесителем (рис. 1.2 в) по своему функциональному
назначению эквивалентна схеме с ФАПЧ, однако значительно уступает
последней по частоте спектра выходного сигнала. Её выходной спектр
обогащен гармониками частоты гетеродина fг, несущей частотой fс и
комбинационными составляющими типа nfг ± m fс (n = m = 1,2, …). Наиболее
интенсивны колебания по частотах fг и fг ± fс при образовании рабочей частоты
по схеме f0= fг ± f соответственно. Их уровни достигают -15 … -30 дБ. В
высокочастотном участке диапазона радиочастот fс « fг, поэтому эти достаточно
интенсивные частоты могут попасть в полосу частот усилителя мощности
(УМ), что может вызвать появление комбинационных составляющих на выходе
ПРД.
Наиболее эффективный метод снижения уровней комбинационных
излучений в данном случае - использование селективных свойств УМ путём
17
выбора fг и fс, исключающего попадание комбинационных частот в его полосу
пропускания. Если это невозможно, используют полосовые и режекторные
фильтры. При этом целесообразно использовать схему с перестраиваемым
вторым гетеродином (рис. 1.2 г).
Выбор частот fc , fг1 и fг2 осуществляется из условия максимального подавления
комбинационных частот, с помощью фильтра Ф и вынесения комбинационных
составляющих, возникающих во втором смесителе, за полосу перестройки.
При построении возбудителя по схеме умножителя частоты (УЧ, рис. 1.2
д) комбинационные колебания определяются частотами
где
- рабочая и комбинационная частоты соответственно: n = 1, 2, 3, …; m
– итоговый коэффициент умножения.
При
где ν – целое число, частоты fк совпадают с частотами
гармоник и субгармоник соответственно. Ближайшими являются
В ПРД с волноводными фидерами комбинационные частоты с fк < f0
полностью подавляются, если же используется коаксиальный кабель их
уровень может быть значительным. Для подавления используют полосовые
фильтры после каждого УЧ. При многочастотном режиме работы усилителя
мощности наиболее опасным являются комбинационные частоты третьего
порядка. ИХ возникновение вызвано нелинейностью АЧХ усилителей на
частотах
где
- несущие частоты первого и второго сигналов.
Физическая природа их возникновения аналогична причинам
интермодуляционных колебаний в приёмниках. В режиме максимального к.п.д.
генераторного каскада уровень таких колебаний составляет -10 … -14 дБ.
Использование узкополосных фильтров для подавления комбинационных
составляющих малоэффективно, так как работа оконченных каскадов проходит
в режиме близком к линейному. Поэтому искусственно снижают коэффициент
усиления, например уменьшение усиления транзисторного каскада на 1 дБ
влечёт за собой снижение уровня комбинационных составляющих третьего
порядка на 20 … 30 дБ.
Интермодуляционные излучения. Различают
два механизма их
возникновения. Первый состоит в том, что внешний сигнал поступает на
оконечный каскад и усиливается совместно с основным сигналом. В этом
случае возможно возникновение побочных колебаний на частотах, являющихся
различными комбинациями рабочей частоты передатчика и частоты внешнего
сигнала, а также усиление внешнего сигнала при параллельном подавлении и
срыве колебаний на основной частоте f0. Отмеченное явление характерно для
18
автогенераторов, охваченных петлёй обратной связи, усилителей на
двухполосных активных элементах.
Сущность второго механизма объясняется влиянием электромагнитного
поля с частотой помехи на показатели активного элемента такие, как крутизна
вольтамперной характеристики, параметры группировки электронов и т.д. , что
приводит к модуляции сигнала на рабочей частоте и изменению спектра
выходного сигнала.
И интермодуляционных колебаний на комбинационных частотах ( рис.
1.3 ) наиболее интенсивны колебания третьего порядка, имеющие частоты: 2fп f0 и 2f0 – fп . Их уровни достигают -35 … -20 дБ при величине входящего
воздействия -20 … -15 дБ.
Для уменьшения уровня интермодуляционных радиоизлучений
применяют частотный разнос близко расположенных передатчиков или
специальные меры по уменьшению помех на выходе оконченных каскадов
(развязка за счёт вентилей, циркуляторов и т.п.).
Рис. 1.3. Интермодуляционные колебания на выходе импульсного
магнетрона
Паразитное излучение. Определяется наличием в усилительных и
генераторных каскадах паразитных связей, которые можно разделить на
внутренние и внешние. Первые обусловлены физическими процессами,
происходящими в самом электронном приборе, и могут быть устранены, как
правило, только за счёт оптимизации конструкции самого прибора. Внешние
связи
обусловлены
особенностями
схемных
решений,
а
также
характеристиками монтажа и применения различного рода экранов. В ряде
современных ЭВП ( в основном типа М ) уровень паразитных колебаний
достигает -30 … -40 дБ [8].
19
Естественно считать, что излучение на основной частоте имеет
максимальную мощность. Известно [7,9], что закон распределения мощности
излучения нормальный, причём среднее значение соответствует номинальной
мощности. Таким образом считаем, что характеристики процесса Pк(f0) и σк(f0) .
Эти предпосылки позволяют реализовать модель оценки излучения, суть
которой состоит в следующем: для каждой гармоники определяется среднее
значение к и статическое распределение уровня. Исходными предпосылками
являются:
средние мощности излучений передающего устройства уменьшаются с ростом
номера гармоник;
уровни мощностей гармоник распределены по нормальному закону, причём
СКО не зависит от номера гармоники.
Исходя из этого, среднее значение уровня каждой к – й гармоники может
быть выражено в виде:
(1.1)
где N ≥ 2; А, В – коэффициенты, постоянные для каждого вида ПРД, А характеризует наклон аппроксимирующей прямой, [А] – дБ/декада; В ордината начальной точки аппроксимирующей прямой при N = 1.
При проведении амплитудной оценки помеховых радиоизлучений (АОП)
дискретный характер излучений на гармониках не принимается во внимание.
Поэтому считают, что ПРД может иметь побочные излучения на любой
частоте и они описываются непрерывной функцией от частоты.
С учётом вышесказанного выражение (1.1) запишем в виде:
Пример расчёта выражения (1.2) приведён на рис. 1.4
Рис. 1.4. Уровни излучений на гармониках
Коэффициенты аппроксимации и параметры излучения определяются по
следующим формулам:
20
(1.4)
где n – число результатов измерений для одной части, Nmax – номер наивысшей
гармоники.
Обозначим PNi – мощность излучения i-ой гармонической составляющей.
Тогда, в свою очередь, по экспериментальным данным устанавливаются
коэффициенты, входящие в (1.3) и (1.4).
По аналогии с (1.2) можно записать выражение для оценки среднего
уровня паразитных радиоизлучений:
(1.5)
При частотной оценке помех (ЧОП) каждому виду излучения ПРД
присваивается средняя частота и оценивается распределение мощности по обе
стороны от этой частоты. Средние частоты основного излучения и излучений
на гармониках считаются детерминированными, а для излучений, не
являющимися гармониками f0 , пользуются вероятностными оценками.
Распределение мощности характеризуют ЗПЧ и огибающей спектра.
Характеристики распределения мощности вблизи основной частоты
определяются, в основном, параметрами модуляции:
(1.6)
где
- расстройка от средней частоты;
- ширина полосы частот
определённого участка спектра;
- наклон огибающей спектра в пределах
полосы
.
Причём считаем, что
.
Очевидно, что для описания огибающей спектра необходимо знание
ШПЧ, в пределах которой уровень излучения приблизительно постоянен, и
скорости убывания огибающей спектра за его пределами.
Так, например, для импульсных передатчиков, имеющих длительность
импульса
, ШПЧ
, а для ЧМ ПРД она однозначно определяется
индексом модуляции.
Коэффициенты Mi в (1.5) определяются для каждого конкретного
анализируемого случая.
21
Вероятность того, что некоторый выходной сигнал появится в пределах
полосы частот В, отстоящей на
от любой заданной настройки ПРД ,
можно записать в виде:
(1.7)
где L - коэффициент, зависящий от типа передатчика.
На рис. 1.5 приведена монограмма расчёта (1.6) для ПРД, по своим
данным близким к передающим устройствам дальномеров, РСБН и РСДН.
Рис. 1.5. Определение вероятности появления помехового сигнала
1.3. Основной и побочные каналы приёма.
Параметры приёмных устройств, влияющие на ЭМС РЭС. К ним
относятся: рабочие частоты; характеристики частотной избирательности (ХЧИ)
по ОКП; параметры главного лепестка диаграммы направленности антенны
(ДНА) при при приёме на рабочих частотах; параметры боговых и задних
лепестков ДНА при приёме на рабочих частотах; ХЧИ по СКП и ПКП; ХЧИ по
блокированию; ХЧИ по интермодуляции; ХЧИ по перекрёстным искажениям;
ДНА на частотах СКП и ПКП, блокирования, перекрёстных искажений и
интермодуляции; восприимчивость к помехам по цепям управления, питания,
коммутации и заземления; нестабильность частоты гетеродина; радиоизлучение
гетеродина; электромагнитное излучение радиооборудования.
Восприимчивость ПРМ, как его свойство реагировать на НЭМП,
определяется частотной избирательностью, которая представляет собой
зависимость амплитуды (мощности) помехи на входе от её частоты при
22
фиксированном (заданном) отношении помеха/шум (П/Ш), либо амплитуде
(мощности) информационного сигнала, либо значений одного из
коэффициентов (блокировании – kБл; перекрёстных искажений - kпи;
интермодуляции – kинт ).
Допустимый уровень амплитуды (мощности) НЭМП, при котором
реакция ПРМ на помеховое воздействие определяется на выходе
соответствующим параметром, не превышает заданного значения, называют
порогом восприимчивости ПРМ и НЭМП. Исходя из параметров,
определяющих реакцию ПРМ, на которые устанавливаются ограничения
(отношение с/(п+ш), амплитуда сигнала, соответствующие коэффициенты),
различают следующие виды ХЧИ: по каналам приёма, по блокированию по
интермодуляции, по перекрёстным искажениям.
Для измерения ХЧИ пользуются двумя методами. Первый из них =
односигнальный, который заключается в подаче на вход ПРМ сигнала в виде
гармонического модулированного или немодулированного колебания,
перестраиваемого по частоте в заданных пределах. При этом возможно
измерение ХЧИ только по СКП и ПКП. Остальные виды ХЧИ измеряются
вторым методом – многосигнальным, при котором на вход ПРМ подаётся
полезный сигнал на f0 и гармоническое модулированное или немодулированное
колебание, перестраиваемое по частоте в заданных пределах. Возможен
вариант, когда подаётся два и более гармонических сигналов. Особенности
измерения параметров ЭМС подробно приведены в [10].
Избирательность по каналам приёма. Параметром АЧХ (K(f)) ОКП,
определяющим избирательность ПРМ от помех по СКП, служит отношение
ширины полосы частот на уровне χ к ширине полосы частот на уровне -3 дБ:
где
- ширина полосы частот на уровне χ, обычно χ= -60 дБ или -30 дБ и
представляет собой значение коэффициента прямоугольности, т.е.
- ширина полосы пропускания ОКП на уровне -3 дБ;
- частоты, на
которых значение АЧХ меньше на χ и -3 дБ соответственно, чем на основной
частоте .
Заметим, что для идеализированного ПРМ не имеет смысла говорить о
СКП. В своб очередь, анализ χ реальных ПРМ показал, что для суммарной
выборки
(приёмники различного назначения)
не является
частотно-зависимым параметром (рис. 1.6).
23
Рис. 1.6. Значение коэффициента прямоугольности ПРМ
Относительное изменение амплитуды входного гармонического сигнала
от частоты этого сигнала, изменяющейся в полосах СКП, при отношении
С/(П+Ш) на выходе, равном допустимому значению, определяет динамический
диапазон ПРМ по СКП .
(1.7)
где
- амплитуда НЭМП на входе ПРМ;
- амплитуда полезного
сигнала на входе ПРМ, соответствующая его чувствительности;
некоторый функционал, описывающий ПРМ, как «чёрный» ящик;
- выходное отношение мощности полезного сигнала к суммарной
мощностишумов и НЭМП;
- относительный уровень помехи по СКП на
выходе ПРМ.
Динамический диапазон (1.7) является мерой линейности приёмного
тракта. Для СКП он численно равен допустимому превышению амплитудной
помехи амплитуды полезного сигнала, ограниченной шумами. Верхняя граница
представляет собой порог восприимчивости ПРМ к НЭМП.
Между
и
существует связь. Если в диапазоне частот СКП
где
граничная частота, определяемая АЧХ ПРМ, т.е.
провести аппроксимацию зависимости динамического
диапазона, получим
-
В свою очередь, динамический диапазон по ОКП определяется
отношением максимальной амплитуды полезного сигнала на входе к
24
амплитуде
, при которой достигаемое значение коэффициента гармоник
на выходе ПРМ:
(1.8)
Избирательность приёмника по ПКП характеризуется
динамическим диапазоном. Аналогично (1.7) запишем
также
(1.9)
где
;
частоты НЭМП удовлетворяют условию
(1.10).
С учётом однократного преобразования частоты условие для
прохождения сигнала на выход ПРМ будет выглядеть следующим образом:
(1.10)
где
- частота воздействующего сигнала; - частоты колебаний гетеродина;
- промежуточная частота;
- коэффициент, учитывающий снижение
избирательности ПРМ по каналам приёма (исключая СКП) за счёт
избирательных свойств высокочастотного тракта (до преселектора) и вида
колебаний гетеродина, участвующего в формировании КП;
коэффициент, учитывающий снижение восприимчивости ПРМ по СКП за счёт
тех же причин, что и для
;
- полоса пропускания УПЧ на уровне χ
(обычно χ -3дБ), практически
;
- полоса пропускания СКП.
Частотная избирательность по блокированию. ХЧИ по блокированию
представляет собой зависимость амплитуды мешающего сигнала на входе от
частоты этого гармонического сигнала при одновременном воздействии
полезного сигнала и при заданном значении коэффициента блокирования kбл
(1.11)
В свою очередь, восприимчивость ПРМ к НЭМП, воздействующим за
пределами ОКП и приводящим к уменьшению отношения С/Ш на выходе, при
фиксированном значении kбл , характеризуется мерой линейности ПРМ:
(1.12)
Соотношение (1.12) определяет динамический диапазон ПРМ по блокированию
на частоте , а его верхняя граница указывает порог его восприимчивости к
НЭМП, приводящих к блокированию.
В практических задачах удобно использовать следующее выражение для
коэффициента блокирования:
(1.13)
где
- выходные амплитуды сигнала и помехи соответственно;
значение выходных амплитуд соответствующих сигналов. Выражение (2.13)
позволяет оценить степень уменьшения отношения с/ш на выходе ПРМ по
сравнению с отношением с/ш на входе при наличии НЭМП за пределами ОКП.
25
Частотная
избирательность
по
перекрёстным
искажениям.
Взаимодействие НЭМП за пределами ОКП и полезного сигнала на
нелинейности, приводящее к искажению временной и спектральной структуры
полезного сигнала на выходе, т.е. восприимчивость ПРМ к мультипликативным
помехам [12], зависит от ХЧИ по перекрёстным искажениям. Такая ХЧИ
представляет зависимость амплитуды мешающего модулированного
радиосигнала на входе от частоты этого сигнала при заданном коэффициенте
перекрёстных искажений kпи .
(1.14)
где
- коэффициент соответствующего вида модуляции меньшего сигнала.
(1.15)
где
и
– напряжения некоторой спектральной
составляющей выходного сигнала при наличии и при отсутствии помехи.
Наряду с этими параметрами в рассматриваемом случае ХЧИ на этапе
проектирования РЭС целесообразно оценить динамическим диапазоном
Частотная избирательность по интермодуляции. В общем
конкретное РЭС могут воздействовать N других средств. При этом
случае на
(1.16)
где
- амплитуда каждого из мешающих сигналов, принимаемая
одинаковой для каждого из них;
– порядок преобразования,
соответствущей на выходе ПРМ;
– коэффициент интермодуляции;
(1.17)
где
- входное напряжение, соответствующее чувствительности приёмника.
Мерой линейности ПРМ к интермодуляции является динамический
диапазон по интремодуляции
:
Заметим, что в дальнейшем все оценки ХЧИ и расчёт параметров ЭМС будет
прводиться для типовой схемы радиоприёмного устройства, изображённого на
рис. 1.7
Uвых
Uвх(t)
Ф1
УРЧ
Пр.
УПЧ
СФ.
Д.
Рис. 1.7. Типовая схема приёмника
26
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ДЛЯ АМПЛИТУДНОЙ И
ЧАСТОТНОЙ
ОЦЕНКИ
ВОСПРИИМЧИВОСТИ
ПРИЁМОАНАЛИЗИРУЮЩИХ ТРАКТОВ ПО ПОБОЧНЫМ КАНАЛАМ
ПРИЁМА.
2.1. Модели оценки характеристик частотной избирательности
Оценки ХЧИ по СКП. Предположим, что динамический диапазон по ОКП
известен, а не ПРМ воздействуют внутренние шумы со спектральной
плотностью N0 и мешающий сигнал на частоте СКП:
(2.1)
где
- частотный разнос между каналами;
- частотный резонанс, соответствующий
коэффициенту прямоугольности
на фиксированном уровне .
Для схемы, изображённой на рис.1.7. отношение С/(Ш+П) на выходе СФ
(ведь это УПЧ) будет равно:
(2.2)
где
- мощность внутренних шумов на выходе
ПРМ;
- нормированная АЧХ ПРМ (УПЧ).
Мощность сигнала на выходе ПРМ в соответствии с [8] равна:
(2.3)
где
- нормированная ковариационная функция сигнала;
разность соответствующих параметров принимаемого и опорного сигналов;
мощность помехового сигнала (2.1) по СКП на выходе ПРМ –
(2.4)
где
- эффективная длительность сигнала;
и
- спектры
полезного и мешающего сигналов;
- нормированная
корреляционная функция, её квадрат является функцией неопределённости.
При совпадении модулирующих функций
и
Подставляя (2.3) и (2.4) в (2.2), получаем:
(2.5)
где
– отношение (С/Ш) вх;
- требуемое отношение С/(П+Ш),
определяемое заданным уровнем качества функционирования ПРМ;
.
С учётом (1.7) и (2.5) имеем
(2.6)
27
где
– допустимое относительное изменение отношения
С/(П+Ш) на выходе при наличии помех по СКП.
Очевидно, что для широкополосного сигнала динамический диапазон
ПРМ с СФ будет в
раз больше и может достигать значений
коэффициента сжатия (базы) сигнала
.
Из (2.6) следует зависимость
от формы АЧХ УПЧ , т.е. от коэффициента прямоугольности как параметра ХЧИ. Для
точки частотного диапазона
получаем
(2.7)
При этом определённому значению параметра
соответствует
определённое значение
, которое зависит от числа контуров в УПЧ и их
частотной расстройки друг относительно друга, что показано на рис. 2.1.
Из рис. 2.1 следует, что при h= 5 … 6
, т.е. при
чувствительности ПРМ, равной А0 =
В, восприимчивость к НЭМП по СКП
Ап < 0,1 … 1 В.
Рис. 2.1. Зависимость
от относительной расстройки h
Оценка ХЧИ по ПКП. Непосредственно в ПРМ (рис. 2.7) основным
источником помех является преселектор, представляющий по отношению к f0
линейное звено с параметрами, а по отношению к fг нелинейное звено [13].
Выходное отношение С/(П+Ш) запишем в виде:
(2.8)
где
– мощность полезного сигнала и НЭМП, прошедших
по ПКП; p,n - № гармоник помехи и гетеродина соответственно.
Анализ (2.8) показывает возможность оценки восприимчивости ПРМ и
помехам по ПКП либо при декомпозиции последних, либо при учёте того, что
28
НЭМП равномерно распределены по всему частотному диапазону и действуют
одновременно по всем ПКП.
Оценим динамический диапазон ПРМ по ПКП (n+p) – го порядка.
Обозначим крутизну передаточной характеристики линейной части ПРМ в
рабочей точке через
. При
резонансный контур настроен на
частоту
.
Для оценки динамического диапазона необходимо знать амплитуду помехи,
прошедшей через один из ПКП., например с номером, соответствующим
Qму порядку преобразования, а также чувствительность ПРМ. Будем считать,
что
,а
- известна.
Для этого случая полезный сигнал на выходе ПРМ в отсутствии НЭМП
определяется в соответствии с [10]:
(2.10)
Результат воздействия НЭМП по ПКП при отсутствии полезного сигнала
запишем в виде:
где
Подставляя (2.9) и (2.11) в (2.8) и решая относительно отношения (2.9),
получаем для канала фильтрации, настроенного на сигнал с частотным сдвигом
Ω и временем запаздывания :
,
(2.12)
Где
.
Из (2.12) видно, что при постоянной амплитуде сигнала и росте
амплитуды колебаний гетеродина восприимчивость к НЭМП, прошедших по
ПКП при p ≥ 2, n ≥ 2, уменьшается. Для зеркального канала (n=1, p=1) имеем:
(2.13)
29
Наиболее неблагоприятной является ситуация, когда источники НЭМП
распределены равномерно в диапазоне
, а спектральная плотность – за
пределами ОКП:
при
, p= 2,3 … .
Интегральный показатель ХЧИ. Введём понятие интегральной
(энергетической) полосы пропускания ПРМ с учётом ПКП [8,11]:
(2.14)
где
- АЧХ при
:
где
,
- граничные частоты, обусловленные нормами на ШПЧ, и
внеполосный спектр излучения [16];
- энергетическая ШПЧ ПРМ.
Мощность НЭМП, прошедших по ПКП
, а мощность
полезного сигнала, соответствующая чувствительности ПРМ, ограниченного
шумами
.
С учётом изложенного запишем (2.8) в виде:
(2.15)
где
– отношение П/Ш;
параметр ХЧИ по каналам приёма при
– интегральный
. Отношение
, т.е.
иногда называют коэффициентом помехозащищённости
Kпз .
Интегральный показатель ХЧИ с одной стороны определяет, какую долю
по ОКП составляет
по ПКП, а с другой – характеризует степень
снижения АЧХ на частотах ПКП по сравнению с АЧХ на рабочих частотах.
Из (2.15) после несложных преобразований получаем:
(2.16)
где
– допустимое изменение выходного параметра
ХЧИ по каналам приёма, обусловленное воздействие НЭМП.
H(f) численно равен прогнозируемому уровню взаимных помех на
частоте f. Очевидно, что H(f) случайная величина, имеющая соответствующие
характеристики распределения:
В силу случайного характера H(f), условие (2.16) обеспечивается с
некоторой вероятностью p0,
(2.17)
Используя соотношения[17] при функциональном преобразовании
плотности вероятности зависимой величины(2.16), имеем:
(2.18)
30
Моделью Флюктуаций амплитуд НЭМП в
логарифмическое нормальное распределение [18]:
точке
приёма
является
(2.19)
С учётом (2.18) и (2.19) получим:
(2.20)
Распределение (2.20) имеет правостороннюю симметрию, зависящую от
и
. Из (2.17) и (2.20) определим значение по заданным
и p0 из уравнения:
(2.21)
где
- табличная функция.
Обозначим
аргумент
функции
, численное значение которого
определяется из зависимости на рис. 2.2 по заданному значению p0 , а
требования к
определяются в соответствии с [8] (рис. 2.3):
Рис. 2.2. Зависимость
от обобщённого параметра
31
Рис. 2.3. Зависимость
от среднего относительного уровня НЭМП
Значение интегрального показателя ХЧИ по каналам приема позволяет
сформулировать требования в области отдельных частот ПКП, вытекающее из
эксплуатационных условий функционирования РЭС, наихудшими из которых
являются
Se( f min ) min ò ð / mmin ,
где mmin - число ПКП.
Оценка ХЧИ по блокированию. Из (2.27) следует, что для
F 1 F 1
F 1
F1 2 0 03 0 0 4 0 0
k p1
k p1k p 2 k p1k p 2 k p 3
F ( A 0)
k pi (q) ш n
,
F2 1 F3 1
F4 1
Fш ( An )
F1
k p1
k p1k p 2 k p1k p 2 k p 3
(2.22)
где Fi - коэффициент шума i -го каскада; k pi0 k pi0 ( An 0) , k pi k pi ( An ) коэффициенты усиления по мощности i -го каскада в отсутствии и при наличии
НЭМП; Fø - соответствующий коэффициент шума ПРМ; i = 1,2,3,4 (Ф, УРЧ,
Пр, УПЧ).
Выразим коэффициент усиления i -го каскада через k ë :
k pi ( An ) n k pi0 ( An 0)
(2.23)
,
0
n k ëi ( An )
Подставляя (2.23) в (2.22) и разделив числитель дроби на знаменатель,
имеем:
(2.24)
káë (q) ( E1 E1 / 1 E? / 1 2 E? / 1 23 )1,
где E1 F1 / Fø ;
E1 ( F1 1) / Fø K p01;
E1 ( F1 1) / Fø K p01K p01;
E1 ( F1 1) / Fø K p01K p01K p01.
32
- параметры, определяющие относительный вклад всех каскадов в общий
коэффициент шума:
1 , 2 , 3 - коэффициенты блокирования по мощности УРЧ, Пр, УПЧ
соответственно.
Для обеспечения низкого коэффициента шума ПРМ обычно
K p 10...30ä . При этом Å3 E2 и Å2 E1 - это означает, что при 0,5 1 1
коэффициент блокирования ПРМ, в основном, определяется коэффициентом
блокирования УРЧ, т.е.
(2.25)
káë (q) ( E1 E2 / 1 )1 [káë (q)]ò ð ,
где [káë (q)]ò ð - допустимое относительное изменение отношения С/(Ш+П)вых.
по блокированию, обусловленное действием помех.
При заданном уровне качества функционирования РЭС – известном
значении коэффициента блокирования, - решая (2.25) относительно
1 [káë (q)]ò ð , находим:
где
(2.26)
káë2 ( An ) E2[káë (q)]ò ð / {E1[káë (q)]ò ð }.
Уровень мешающего сигнала на входе ПРМ в соответствии с [10] равен:
E2 [káë (q)]ò ð
1
2
(2.27)
An2
1
ø ,
2
| k (n ) |
1 E2[káë (q)]ò ð
| G (2) (U ?? ) / G(U ?? ) | - модуль передаточной характеристики УРЧ;
| k (n ) |2 - коэффициент передачи входного фильтра УРЧ на частоте
помех;
ø2 - мощность шумов на выходе УРЧ.
Для полезного сигнала с амплитудой Ac
E2[káë (q)]ò ð 1
An2
1
(2.28)
Dáë ( Ac ) 2
1
,
Ac | k (n ) |2 Ac2 1 E2 [káë (q)]ò ð q 2
где q 2 Ac2 / ø2 - отношение С/Ш на входе ПРМ.
ХЧИ по блокированию определяется для случаев, когда F0 | ? 0 | , т.е.
когда НЭМП не проходит на выход УПЧ.
По аналогии с (2.1) нетрудно получить:
Dáë ( Ac ) Dáë ( A0 ) 2 ,
(2.29)
где 2 Ac2 / A02 .
Очевидно, что увеличение принимаемого сигнала приводит к снижению
Dáë ( Ac ) при káë (q ) const , что, в свою очередь, вызывает увеличение
восприимчивости ПРМ к НЭМП, блокирующим УРЧ.
ХЧИ по перекрестным искажениям. В общем случае необходимо
воспльзоваться методикой последовательного рассмотрения прохождения и
33
обработки сигналов в каждом из каскадов. Для простоты будем считать, что
перекрестные искажения имеют место в УРЧ.
При некогерентной обработке информации необходимо учитывать
влияние всех спектральных составляющих полезного сигнала, возникших за
счет влияния мультипликативных НЭМП на нелинейностях приемного тракта,
на отношение С/(Ш+П) на выходе УПЧ. В соответствии с [8]:
kï ø ï2ø / P0 | M (t ) |2 c02 ,
где ï2ø - мощность флюктуационной составляющей мультипликативной
помехи;
M (t ) - помеховая функция модуляции;
P0 - мощность полезного сигнала на выходе УПЧ;
c02 - среднее значение функции помеховой модуляции.
При отсутствии блокирования полезного сигнала НЭМП отношение
С/(Ш+П) на выходе УПЧ запишем в виде:
(2.30)
q2 A02 / ( ø2 ï2ø ) q02 / (1 kï ø q02 ) qò2 ð .
Решая (2.30) относительно kï ø , найдем ограничение его допустимого
значения:
(2.31)
kï ø q 2 / qò2 ð ,
где q2 (q02 qò2 ð ) / q02 - допустимое относительное изменение отношения
С/(П+Ш).
Из [8] имеем:
(2.32)
kò ð mn | S (U 00 ) / S (U 00 ) |2| k (n ) |2 An2 / Ac2.
Найдём Dï åð An2 / Ac2 , для чего подставим (2.32) в (2.31)
q
1
S (U 00 ) 1
(2.33)
,
2
qò ð | k (n ) | S (U 00 ) mn Ac
где mn - коэффициент АМ мешающего сигнала.
Разделив и умножив правую часть (2.33) на значение амплитуды полезного
сигнала A0 , соответствующей чувствительности ПРМ, ограниченной шумами,
получим:
(2.34)
Dï åð ( Ac ) Dï åð ( A0 ) / 2 ,
Dï åð ( Ac )
где 2 Ac2 / A02 , а Dï åð ( A0 ) - динамический диапазон ПРМ в режиме приема
«слабых» сигналов. При увеличении Ac , т.е., когда 1, динамический
диапазон уменьшается. Последнее обстоятельство подтверждается физической
особенностью мультипликативных помех, при наличии которых дисперсия
флюктуационной составляющей возрастает с увеличением уровней
воздействующих на нелинейность сигналов.
34
Отметим, что динамический диапазон ПРМ по перекрестным искажениям при
некогерентной обработке сигналов для типовых РЭС ГА ( A0 90äÁ /  ) лежит
в пределах 90...120äÁ .
При когерентной обработке параметры ХЧИ по перекрестным искажениям
необходимо оценивать с учетом новых спектральных составляющих (в
разрешающем объеме функции неопределенности). В этом случае в отличие от
(2.31) и (2.32) используется дифференциальный коэффициент перекрестных
искажений, определяемый отношением уровня спектральных составляющих
функции
M (t ) , попадающих в элемент разрешения, к уровню
информационного сигнала.
Запишем сигнал на выходе УПС при наличии помехового воздействия в виде:
1
(2.35)
Wì ( , ) y M (t )U (t )Uˆ (t )e jt dt ,
2
где y - постоянная, зависящая от коэффициента усиления фильтра;
U (t ) - комплексная огибающая полезного сигнала, сопряженная с
импульсной характеристикой СФ.
При периодическом характере искажений, огибающую сигнала на выходе СФ
можно представить в виде [12]:
Wм ( , )
где
yE0 n
| 0 ( , ? n м ),
(2.36)
n
0 ( , ) – корреляционная функция сигнала;
B0 I - нормированная энергия;
n - уровень n-й составляющей при разложении M (t ) в ряд Фурье,
1
n
Tì
Tì
M (t )exp( jn ì t )dt ,
(2.37)
Tì
Tì - период модуляции или длительность импульса;
ì - модулирующая частота НЭМП.
С учетом выражений [8] для коэффициента, определяющего влияние
нелинейности приемного тракта на структуру воздействующего сигнала на
частоте p-й гармоники ( h) и функция помеховой модуляции, обусловленной
воздействием совокупности сигналов на нелинейности и (2.37), запишем:
(2.39)
1(1) (U 00 , An ) An | K (П 0 ) || S (U 00 ) / S (U 00 ) | .
С учетом (2.38) и (2.39) и используя оценку уровня восприимчивости ПРМ к
перекрестным искажениям вида (2.40):
(2.40)
yn | 1(1) || 0 (n è / Ä , nì ) | [ An ( , )]äî ï ,
Ä - девиация частоты сигнала;
[ An ( , )]äî ï - допустимый уровень «ложных» отметок на интервале
существования функции неопределенности, получаем:
где
35
2[ An ( , )]äî ï
S (U 00 )
(2.41)
.
n | 0 (n ì è / Ä , n ì ) || K (n 0 ) | S (U 00 )
В соответствии с определением для Dï åð , данным в разделе 1.2 настоящего
учебного пособия, имеем
4[ An ( , )]äî ï
S (U 00 )
(2.42)
Dï åð ( A0 , , ) 2
A0 | K (n 0 ) |2 | 0 ( , ) |2 S (U 00 )
An ( , )
Если M (t ) - стационарная случайная функция, то на выходе УПЧ присутствует
флюктуационная помеховая составляющая, дисперсия которой в соответствии с
[27] равна:
1
2
(2.43)
ø yE0 G0 ( ) | ( , 0 ) |2 d ,
где G0 ( ) | - энергетический спектр флюктуаций M (t ) .
Превышение помехой уровня полезного сигнала приводит к уменьшению
разрешающей способности. Задаваясь (2.43), получаем
2[ ø2 ( , )]äî ï
S (U 00 )
(2.44)
An
.
2
2
| ( ,0 ) | | K (? ? ) | S (U 00 )
Эти особенности учитываются при проектировании приемников РЭС ГА.
Оценка ХЧИ по интермодуляции. Уровень восприимчивости ПРМ
зададим в виде
Aèí ò (kèí ò , f1 , Q 2 const ) Anäî ï ,
где Q 2 | p | | n | - порядок интермодуляции для двух мешающих частот 1 и
2 ; kèí ò ( Pèí ò / P0 )âû õ , P0 - мощность соответствующая чувствительности.
Наиболее неблагоприятны ситуации, когда Q=2 и Q=3, т.е. ? 1 1 и
21 2 0 .
С учетом аддитивного характера воздействия помех
(2.45)
q 2 P0âû õ / ( ø2 Pèí ò .âû õ ) q02 / (1 kèí ò ) qk2 ,
где
;
.
Из (2.45), по аналогии с предыдущими случаями, находим
(2.46)
В соответствии с результатами, полученными в [8], запишем для
интермодуляционных составляющих 3-го порядка, образуемых на
нелинейности в УРЧ при
и
:
(2.47)
36
Подставляя (2.47) и (2.48) в (2.46) и с учётом определений, введённых в
предыдущем разделе, получим:
Динамический диапазон (2.50) и (2.52) является мерой линейности ПРМ,
в пределах котрой явлением интермодуляции можно пренебречь. Для типовых
значений переменных (РЛС и РНС ГА)
2.2. Модели для описания
параметров ЭМС антенно-фидерных
устройств
В РЭС ГА используется около 20 типов антенн. Естественно
предположить, что влияние помехи прежде всего следует её уровень на входе
антенны. Характеристики антенно-фидерных устройств, влияющие на ЭМС,
подробно рассмотрены в [19].
Обобщая, можно выделить следующие характеристики:
на основной частоте излучения (приёма) – уровни боковых и задних
лепестков ДНА при рабочей и ортогональной поляризации в
горизонтальной и вертикальной плоскостях;
на побочных частотах излучения (приёма) – уровни тех же лепестков и
при тех же условиях;
во всём частотном диапазоне – коэффициенты усиления, комплексные
сопротивления и коэффициент стоячей волны (КСВ) на входе антенны.
Кратко рассмотрим эти параметры. Для оценки уровня ЭМП необходимо
определить коэффициент усиления – G. В случае анализа излучения (приёма)
на побочных частотах
(2.53)
где
- коэффициент усиления на рабочей частоте при поляризации
;
, где Se – эффективная поверхность антенны; C, D- постоянные,
характерные для конкретного типа антенны.
Антенны РЭС ГА, как правило, высоконаправлены. Для них
, где
- ширина ДНА по углам азимута ( ) и угла
места ( ) соответственно. При уменьшении G углы и увеличиваются. Для
частоты f и поляризации p можно записать:
37
(2.54)
(2.55)
Влияние вида поляризации учитывается поправочным коэффициентом. Так, для
любой поляризации
где
- учитывает изменение G из-за несовпадений поляризации, дБ.
При нестрогом приближении результирующий коэффициент усиления в
ближней зоне на расстояние R от антенны может быть представлен
соотношениями:
где [R] – м, A – площадь апертуры, м2.
Связь между антеннами в значительной степени определяется видом
поляризации волн. В общем случае, эллиптически поляризованную волну
можно рассматривать как результат сложения двух волн с линейными
поляризациями Ex и Ey или как результат сложения двух волн круговой
поляризации с противоположными вращениями. Пусть поля первой и второй
антенн характеризуются индексами 1 и 2. Тогда коэффициент связи равен:
(2.56)
Анализ выражения (2.56)показывает следующее:
1. Ксв=0,5 в случае, если одна из антенн имеет круговую поляризацию, а
вторая – линейную;
2. Ксв=1 для двух линейно поляризованных антенн, если плотности
поляризации совпадают (условие согласования);
3. Ксв=0 для двух линейно поляризованных антенн, если плотности
поляризации не совпадают (условие «развязки»);
4. Ксв=1-Епр1 и Епр2 , Ксв=0- Епр1 и Елев2 , т.е. для антенн круговой поляризации
согласованной является антенна того же направления вращения и
наоборот.
Учёт взаимной ориентации антенн рассмотрим с помощью рис. 2.3.
Из рис. 2.3 ясно, что антенна ПРМ расположена на основном направлении
излучения ПРД (ИП) при выполнении условий:
(2.57)
где
,
- азимут и угол места основного лепестка ДНА ПРД;
и
–
углы, определяющие направление от ПРД к ПРМ;
,
- ширина главного
лепестка ДНА ПРД в азимутальной и вертикальной плоскостях.
38
Рис. 2.3. Расположение ПРД (ИП) и ПРМ (РП) : а- горизонтальная плоскость
(азимут); б- вертикальная плоскость (угол места)
Если (2.57) не выполняется, то ПРД расположен на неосновном
направлении излучения ПРД. При условии, что ПРД расположен на
направлении основного лепестка ДНА ПРМ, то должно совместно выполняться
следующее:
(2.58)
или
(2.59)
Из рис. 2.3 определяем:
(2.60)
При оценке режимов сканирования используют геометрическую
вероятность совпадения осей главных лепестков. Так, например, рассмотрим
случаи:
совпадение основного направления излучения (ОНИ) и основного
направления приёма (ОНП), при этом З (ОНИ-ОНП) =
;
фиксированная антенна направлена на сканирующую, при этом Р(ОНИОНП)=
;
фиксированная антенна направлена в сторону от сканирующей, при этом
Р(ОНИ-ОНП)= 0, Р(ОНИ-ОНП)=
;
Р(ОНИ-ОНП)=
.
39
При расчётах уровней помех в ЭМС обычно используют приближенные
соотношения, позволяющие оценить ослабление радиоволн при распределении
на рассматриваемой трассе.
(2.61)
где
- коэффициенты, определяющие зависимость затухания от частоты и
расстояния;
– постоянная, зависящая от потерь при распространении;
–
Частота НЭМП в МГц; r- расстояние в км.
Вопросы для самопроверки
1. Приведите классификацию помеховых воздействий, классифицируемых
по физико-статистическим признакам.
2. Дайте определение шумовым излучениям радиопередающих устройств.
3. Приведите механизмы возникновения побочных радиоизлучений.
4. Раскройте аналитическую модель паразитных излучений.
5. Дайте определение основного и побочных каналов приёма.
6. Чем определяется коэффициент прямоугольности?
7. Выведите соотношение для ХЧИ по СКП.
8. От чего зависит динамический диапазон радиоприёмников по побочным
каналам приёма?
9. Приведите модель интегрального показателя ХЧИ.
10.Чем
определяется
ХЧИ
приемо-анализирующих
трактов
по
блокированию?
11.Приведите модель ХЧИ по перекрёстным искажениям, по
интермодуляции.
12.Раскройте модель описания характеристик ЭМС АФУ.
40
3. ЭЛЕКТРОМАГНИТНАЯ ОБСТАНОВКА В АЭРОПОРТАХ ГА
3.1. Влияние ЭМО на характеристики информационных потоков в ТКС
ГА и особенности учета функционирования бортового и наземного РЭО
Перечень и состав объектов УВД, навигации, посадки и связи,
устанавливаемый в аэропортах ГА, определяется в соответствии с НПП ГА 85
классами аэропортов и аэродромов.
Размещение наземных РЭС относительно ВПП, друг друга, наземных
сооружений и местных предметов определяется нормами технологического
проектирования объектов УВД, навигации и посадки. Основными критериями
по размещению РЭС относительно ВПП являются:
исключение влияния РЭС ГА, как летных препятствий;
обеспечение перекрытия воздушных трасс данного районного центра (РЦ
УВД) и получение минимальных углов закрытия в направлениях,
совпадающих с трассами и воздушными коридорами;
обеспечение условий нормального функционирования каждого РЭС с
оптимальными технико-экономическими показателями;
возможность соблюдения минимально допустимых расстояний от РЭС до
населенных пунктов, различных сооружений, зданий и т.п., а также
между самими РЭС.
Большая часть комплексов и систем, обеспечивающих посадку ВС, имеют
сравнительную жесткую привязку к местности относительно ВПП,
обусловленную функциональным назначением средств. Другие же РЭС,
например, ОРЛ-Т, ОРЛ-ТА, РСБН, метеорадиолокаторы (МРЛ) могут иметь
различные варианты размещения относительно ВПП. В частности, РСБН может
устанавливаться на расстоянии не более 600м от оси ВПП и не более 1200м от
центра ВПП. С целью уменьшения уровня межсистемных помех РСБН и ОРЛА обычно размещают по разные стороны от траверса ВПП, причем расстояние
между ними l≥600м.
Максимальное удаление радиолокационных средств от КДП прежде всего
определяется допустимыми протяженностями линий управления и трансляции
данных на КДП. Так, например, для ОРЛ-Т l≤15км при использовании
радиорелейной линии связи, а в случае использования кабельных линий l≤5км.
Такую же величину составляет расстояние от КД для ОРЛ-А, РЛС ОЛП, МРЛ.
На рис. 3.1. приведена типовая схема размещения РЭО в а/п ГА I…III
классов.
41
Рис. 3.1. Типовая схема размещения РЭО
Частотный анализ возможных каналов взаимодействия бортовых и
наземных систем РЭО представлен на рис.3.2.
Рис. 3.2. Результаты частотного анализа обеспечения ЭМС РЭС в аэропортах I
класса
42
Необходимо отметить, что информация о реальной ЭМО в районе
аэропорта или борта ВС содержится в выходном сигнале ПРМ. В [20]
приводится методика регистрации этого сигнала, например, с помощью
осциллографа или специального устройства с микропроцессором и
соответствующим узлом АЦП, с последующим проведением статистической
обработки. Очевидно, что статистические характеристики зависят от того,
находится ли конкретный ПРМ только под воздействием полезного сигнала или
на его вход воздействует совокупность сигналов и помех. Суть упомянутой
методики
содержится
в
следующем.
Идеализированную
ЭМО,
соответствующую первому случаю, можно принять за опорную и сравнивать с
ней реальную, что позволит произвести анализ взаимовлияния РЭС в случае,
если источник НЭМП установлен. Параллельно можно количественно оценить
ЭМО, если провести сравнительный анализ вероятности превышения заданного
уровня выходными сигналами ПРМ на фиксированном интервале наблюдения
T. Выходной сигнал ПРМ Uвых(t) в случае воздействия на его вход группового
сигнала показан на рис. 3.3, а в случае испытательного сигнала – на рис. 3.4.
Рис. 3.3. Оценка выходного сигнала ПРМ в случае воздействия НЭМП
Рис. 3.4. Выходной сигнал ПРМ в случае идеализированной ЭМО
Последний можно получить в случае подачи на вход ПРМ через
эквивалент антенны испытательный сигнал от генератора, модулированного,
например, напряжением с f=1кГц и m=30%. На графики рис. 3.3 и 3.4 наносят
43
уровни X и –Y (X=|-Y|), значения которых составляют определенные доли
амплитуды выходного сигнала, например, 0,7U âû0 õ , 0,3U âû0 õ и т.д. Прямые,
соответствующие данным уровням, выделяют внешние области A и C и
внутреннюю область –B.
Обозначим через P(a) и P(c) вероятности того, что в момент времени t,
0<t<T значения выходного сигнала Uвых(t) попадают во внешние области A и С;
P(b) соответственно в B, а через P 0 (a) , P 0 (b) и P 0 (c) аналогичные состояния
для сигнала U âû0 õ (t ) . Расхождения соответствующих вероятностей можно
оценить следующим образом
divP [ P 0 (a) P(a)]log[ P 0 (a) / P(a)] [ P 0 (b) P(b)]
log[ P 0 (b) / P(b)] [ P 0 (c) P(c)]log[ P 0 (c) / P(c)]
(3.1)
Выражение (3.1) косвенным образом учитывает нелинейные свойства
приемо-анализирующих трактов РЭС (X и Y имеют смысл порога), оно
обращается в ноль при равенстве соответствующих вероятностей.
Следовательно, ЭМО тем благоприятнее, чем меньшее значение выражения
(3.1).
Данные для определения P1 ( j ) можно получить, заменяя исследуемые
U âû õ ,
процессы
последовательностью
случайных
событий,
U âû0 õ
характеризующимися тремя возможными, но несовместимыми событиями A, B
и С (рис. 3.3 б, в, г). При этом определяют вероятности перехода или
неперехода из одного состояния в другое и находят переходные вероятности,
применяя аппарат конечных цепей Маркова [21] к принятой модели
исследуемых процессов U âû õ и U âû0 õ .
Обозначим через N и N среднее число пересечений анализируемым
процессом Uвых(t) уровней X и Y снизу и сверху соответственно. При этом
число N x равно количеству событий Ak , характеризующихся состоянием A ,
N y Cm : c , а N x и N y Bl : b на интервале наблюдения. Разобъем отрезок T
на n0 таких коротких интервалов времени T / n0 , что внутри любого из них
анализируемый процесс не может изменить своего состояния более одного
раза. Импульсы с длительностью называются опорными или счетными (рис.
3.3 б, в, г, д). При этом события Ak0 , Bl0 , Cm0 , Ak , Bl и Cm рассматриваются как
чередующиеся группы счетных импульсов. Случайные серии опорных
импульсов можно рассматривать как простые марковские цепи, которым
соответствует граф на рис. 3.5.
44
Рис. 3.5. Сигнальный граф переходных вероятностей пересечения уровней
Переходные вероятности, соответствующие этому графу, запишем в виде
-матрицы:
Paa Pab 0
(3.2)
Pba Pbb Pbc ,
0 Pcb Pcc
а начальное состояние в виде:
(3.3)
0 P 0 (a), P 0 (b), P 0 (c) .
Пусть t n , принимаемый за начало отсчета, процесс характеризовался
событием q a, b, c . Тогда вероятность того, что n -м окажется импульс,
соответствующий событию S a, b, c , определится как соответствующий
элемент матрицы следующего вида:
Pq ( S ) 0n .
(3.4)
Переходные вероятности, образующие матрицы (3.2…3.4), связаны со
средними значениями N и N и количеством опорных импульсов na , nb , nc ,
соответствующим наступлению событий a, b, c , следующими соотношениями:
Pba N x nb ; Pab N x na ; Pcb N y nb ;
Paa 1 Pab ; Pbb 1 ( Pba Pbc ) ; Pcc 1 Pcb .
Очевидно, что чем ниже устанавливается пороговые значения X и Y ,
тем более жесткие требования предъявляются к ЭМО.
Отметим, что na nb nc n0 . Если длительность счетных импульсов
значительно меньше периода колебаний огибающей сигнала, то (3.4)
упрощается и преобразуется в условные вероятности:
P(b) Pab Pcb ( Pba Pcb Pbc Pab Pab Pcb )
P(a) Pcb Pba ( Pba Pcb Pbc Pab Pab Pcb )
(3.5)
P(c) Pab Pbc ( Pba Pcb Pbc Pab Pab Pcb )
45
3.2. Особенности учета уровня межсистемных помех
При оценке допустимого уровня помех, воздействующих на конкретную
радиотехническую систему, находят из допусковых норм изменения выходных
характеристик системы, численное значение которых определяется выходным
отношением сигнал/помеха.
Раздели помехи сосредоточенные по спектру и во времени. Очевидно, что
первые представляют собой ансамбль узкополосных сигналов, излучаемых
РЭС. Представим i -й узкополосный сигнал в виде:
U i (t ) Emi K i (t )cos[0 (t ) i (t )] ,
(3.6)
60 PG
i i
Wi - амплитудное значение напряженности поля i -го
ri
сигнала в точке приема;
Pi - мощность, подводимая к антенне i -го источника НЭМП;
ri - расстояние от i -го источника до точки приема, м;
Gi - коэффициент усиления i -й антенны, [ Emi ] =В/м;
Wi - множитель ослабления, учитывающий высоты поднятия антенн, вид
поляризации, параметры почвы и т.д.
K i (t ) - безразмерный множитель, позволяющий охарактеризовать закон
изменения огибающей и найти мгновенное значение амплитуды сигнала.
Комплексная спектральная функция (3.6) запишется в виде:
60 PG
i i
(3.7)
Si ( ) U i (t )exp( jt )dt
Wi S ( ) ,
r
i
где
Emi
где S ( ) - нормированная спектральная функция;
S ( )
S (t )exp( jt )dt .
i
В соответствии с равенством Парсеваля удельная энергия процесса равна
2 i
60 PG
2
1 2i 2
2
i i
(3.8)
Ý i Si ( )d
Wi S i ( )d
1i
ri
1i
Полагая, что каждый i -й сигнал занимает полосу i 2i 1i , в
пределах которой Si ( ) , из (3.8) получаем:
Ýi
60 PG
2
1
i i
Wi 2 S i i S 2 i ,
ri
2
(3.9)
где Si2 - интенсивность i -го помехового сигнала.
С учетом (3.9) получаем выражение для оценки энергии сосредоточенной
по спектру помех, определяемой I источниками:
46
60 PG
1 I 2
2 2
i i
(3.10)
W
S
S i .
i
r
i
i
i 1
i
1
i
К помехам, сосредоточенным во времени, можно отнести импульсные и
флюктуационные. В зависимости от частоты следования импульсов помеха
может рассматриваться как импульсная и как флюктуационная.
Вероятность превышения помехой, сосредоточенной во времени и
содержащей импульсную и флюктуационную составляющие, некоторого
уровня x0 , т.е. функция распределения вероятностей случайного процесса,
является распределением Вейбулла.
(3.11)
P(U ) (1 )exp x02 02 exp xn2 n2 ,
2
a
2
a
0
n
В (3.11) первое и второе слагаемые соответственно характеризуют
флюктуационную и импульсные составляющие; x V 2Vä , V - мгновенная
Ý
60
I
амплитуда помехи;
2Vä - действующее значение помехи, измеренное и
усредненное ПРМ; 0 , a0 , n , an - параметры распределения; - средняя
скорость следования импульсов; - средняя длительность импульсов.
Среднеквадратичное значение мощности помех, выделяемой на
единичном сопротивлении, находится по формуле:
2
U (1 )a02Vä 0(2 01 1) an2Vän(2 n1 1),
(3.12)
где Г( ) – гамма-функция.
Значения выражений (3.11) и (3.12) зависят от конкретных условий, в
частности от f 0 , f 0 x .
Напряжение помех с постоянной амплитудой и частотой описывается
выражением:
U ï (t ) U mn sin[nt ï ] ,
где U mn и n - амплитуда, частота и фаза сигнала.
При одновременном воздействии на ПРМ сигнала и помехи на выходе
детектора возникают биения с частотами помехи и сигнала. Амплитуда
результирующего сигнала на выходе УПЧ при этом равна:
2
2
U mp KÓÏ × U mn
U mc
2U mnU mc cos( t p ) ,
(3.13)
где KÓÏ × - коэффициент усиления УПЧ;
ñ ï ; p c n .
При ï ñ , т.е. когда ñ ï =0, (3.13) запишется в виде:
2
2
U mp KÓÏ × U mn
U mc
2U mnU mc cos p ,
где в общем случае разностная фаза случайна.
Если разностная фаза меняется внутри интервала 0…2 , то U mp
изменяется в пределах KÓÏ × (U mn U mc ) до KÓÏ × (U mn U mc ) .
47
На нагрузке детектора образуются постоянная составляющая и
флюктуирующие видеоимпульсы отрицательной и положительной полярности.
Вероятность появления их одинакова, но при достаточной интенсивности это в
среднем в два раза уменьшает количество импульсов, образующих отметки от
полезных сигналов.
Амплитуда видеоимпульсов на выходе детектора зависит от отношения
с/ш на его выходе. По мере роста интенсивности помехи наступает насыщение
цепей активных элементов, каскады УПЧ перегружаются, усиление ПРМ
падает и, следовательно, отметка сигнала постепенно пропадает. Воздействие
помех на экране ИКО проявляется в виде затемненного сектора в направлении
помех, величина которого зависит от мощности ПРД помех, ширины ДНА РЭС
и уровня их боковых лепестков.
При несовпадении частот сигнала и помехи ï ñ cos( t p ) меняется
в пределах [ I , I ] с частотой , а огибающая амплитуды результирующего
напряжения приобретает вид гармонического колебания. Вследствие этого
наблюдается дробление и ослабление полезного сигнала.
На выходе радиотелефонного ПРМ немодулированная помеха
прослушивается как тон разностной частоты, затрудняя прием передаваемых
сообщений.
Избавиться от помех можно с помощью режекторных фильтров.
Примеры воздействия помех приведены на рис. 3.6.
Рис. 3.6. Примеры воздействия помех
К модулированным непрерывным помехам относятся АМ, ЧМ, АЧМ и
другие сигналы. Простейшей является АМ помеха:
U ï (t ) U ï (1 mn sin nt )cos(nt n ) ,
где m – коэффициент модуляции.
При воздействии на ПРМ помеха и сигнал имеют вид:
U ï (t ) U ï [1 mn (t )]cos(nt n ) ,
где mn (t ) mn sin nt - моделирующая функция помехи;
U c (t ) U c [1 mc (t )]cos(ct c ) ,
где mc (t ) mc sin ct - моделирующая функция сигнала.
48
На выходе детектора образуется суммарное напряжение, огибающая
которого равна:
U î ã K ï ðì U î2ï U î2ñ 2U î ï U î ñ cos[(ï ñ )t ( ï ñ )]
K ï ðì U î2ï U î2ñ 1
2U î ï U î ñ cos[(ï ñ )t p
(3.14)
,
U î2ï U î2ñ
где U î ï U ï [1 mn (t )] , U î c U c [1 mc (t )] - соответственно огибающие функции
помехового и полезного сигналов;
K ï ðì - коэффициент усиления ПРМ.
Если K ï ðì I и mc I , mï I , то на выходе детектора имеем:
U U U c U n U ,
где
(3.15)
U U î ñ 1 b2 ; b (U n / U c ) 1 ; n c ;
U nb (2b 1)
U (2 b 2 )
U c c
m
;
U
mn ;
c
n
2(1 b 2 )3/2
2(1 b2 )3/2
U U n 1 b2 [1 b2 (1 b2 )mc 1 (1 b2 )mn ]cos t .
Из (3.15) следует, что в данном случае происходит маскировка сигнала
помехой, при b 1 сигнал подавляется в детекторе, а отношение с/п при этом
равно:
U c
b 2 2 mc 1
(3.16)
2
.
U n
2b 1 mn b 2
âû õ
Так, например, при mc mn и b 2 , с/п=1 6 .
На экране ИКО модулированные помехи проявляются в виде радиальных
и искривленных засвеченных секторах. ЧМ-помехи могут прослушиваться как
звуковые сигналы различных типов.
Шумовые помехи – результат их воздействия представлен на рис. 3.7.
Рис. 3.7. Результат воздействия шумовой помехи
3.3. Вероятностные оценки результата воздействия помех
В общем случае вероятность нарушения ЭМС при воздействии
всевозможных сочетаний n ИП можно записать в виде:
(3.17)
Pí ( n) P( na ) ( Pn , f ,T , r ) ,
49
где P n - вероятность n -го состояния ЭМО, созданная различными
сочетаниями n ИП для i -го РП;
P( na ) ( P n , f , T , r ) - вероятность нарушения ЭМС при условии
осуществления n состояния.
Искомая вероятность нарушения ЭМС находится суммированием
вероятностей нарушения для всех ситуаций:
N
Pí Pí ( n ) .
n 1
Необходимо отметить, что величина
P( na ) ( P n , f , T , r )
определяется
статистическими методами.
Рассмотрим метод решения задачи в случае двух средств. Пусть индекс
«1» относится к ИП, а в «2» - к РП. Все исходные данные известны и, кроме
этого, известныграницы возможных частот f11 f1 f12 , f 21 f 2 f 22 и углов
ориентации антенн 11 1 12 , 11 1 12 , 21 2 22 и 21 2 22 .
Значения указанных величин (рабочих частот и углов) считаются случайными и
распределены по равномерному закону в указанных границах их определения в
силу предположения о некоррелированности их выбора.
Считаем, что Päî ï от данного типа ИП для данного РЭС – РП задана.
Таким образом,
Päî ï Päî ï [ñ / (ø ï ) |äî ï ] Pï [ñ / (ø ï )],
где Pn - мощность НЭМП, приведенная по входу ПРМ РЭС, являющегося РП.
В соответствии с [10] искомая вероятность W определяется следующим
образом:
W ( Pn Pnäî ï ) lim(n / m),
m0
m - число случайных реализаций вектора R | f1 , f 2 ,1 , 1 , 2 , 2 |,
распределенных в области Д его возможных значений;
n - число реализаций вектора R, для которых вычисленное значение Pn
удовлетворяет условию Pn Pnäî ï .
Pn
Для получения функциональной зависимости вероятности
применяется аналитический метод, основанный на геометрической
интерпретации вероятности наступления рассматриваемого события. Его суть
заключается в следующем.
Определяем зависимость Pn Pn ( R) мощности НЭМП, приведенной по
входу РП (по ОКП), от вектора R . Далее вычисляем объем VD области Д
возможных значений вектора R по формуле:
VD ( f12 f11 )( f 22 f 21 )(12 11 )( 22 21 )( 12 11 )( 22 21 )
(3.18)
где
50
и объем VDc области Дс Д, в пределах которой выполняется соотношение
Pn ( R ) Päî ï , и который чаще всего определяется методами численного
интегрирования на ЭВМ:
(3.19)
VDc Z ( R )dR,
D
где
1 ï ðè Pn ( R) Päî ï
Z ( R)
0 ï ðè Pn ( R) Päî ï .
Затем находим искомую вероятность:
W ( Pn Päî ï ) VDc VD .
(3.20)
(3.21)
Вероятность прохождения полезного сигнала через приемник при воздействии
внешних импульсных помех и внутренних шумов самого приемника ( Pcn )
определяется в виде
Pcn Pc (1 Pcî â Pèí ò ),
(3.22)
где Pc - вероятность прохождения сигнала через приемник с учетом
внутренних шумов приемника;
Pñî â - вероятность совпадения импульсов сигнала и помехи;
Pèí ò - вероятность интерференционного сбоя импульса сигнала
импульсной помехой.
Из [3] имеем
(3.23)
Pc 1 Ô[U - ( 1 )] ,
где Ф[…] – нормированная функция Лапласа;
1
2
U
1
U
4
2 0 1 .
U mc ø ;
2
2
2
2a (2a) 3 (2a)
a
При определении вероятности совпадения импульсов сигнала или помехи
( 0 ) была такой, при которой исключалось бы срабатывание порогового
устройства на выходе приемника.
На рис. 3.8 представлены возможные случаи расположения
рассматриваемых сигналов.
Очевидно, что границы изменения длительности импульсов помехи при
фиксированной длительности сигнала, составляют n min c 2 0
и
n max c 2 0 , а передний фронт импульса помехи будет находиться в пределах
2 0 . При иных условиях ( 0 0 ) будет срабатывание порогового устройства и
неперекрытая часть импульса помехи или сигнала будет восприниматься как
импульс сигнала за счет интервалов стробирования дешифратора ( ñò ð ) . Считая
поток импульсных помех пуассоновским, имеем
51
где
(2ï 0 )l
(3.24)
pñî â p(l ,2 0 )
exp(2ï 0 ),
l!
p (l , 2 0 ) - вероятность того, что на интервале 2 0 появляется l импульсов;
ï - средняя частота импульсов помехи.
Рис. 3.8. Совпадение импульсов сигнала и помехи
( c , ï - длительности импульсов сигнала и
помехи соответственно.
è - длительность
перекрытия импульсов)
Считая, что вероятность появления более одного импулься НЭМП на
интервале 2 0 мала, получаем
pñî â p(1,2 0 ) 2ï 0 exp(2ï 0 ).
(3.25)
Раскладывая в (3.25) exp(2ï 0 ) в степенной ряд, получаем расчетное
соотношение
(2ï 0 )2 (3ï 0 )3
(3.26)
pñî â 2ï 0 1 2ï 0
... .
2!
3!
Вероятность интерференционного сбоя полезного сигнала импульсной
помехой определяется в виде
pèí ò p(u ) p( ) p( ) ,
(3.27)
где
p(u) - вероятности близких амплитудных значений;
p( ) - вероятности противофазности высокочастотного заполнения;
2 , условия
p( ) - вероятности того, что при c n и n c
подавления импульса практически неизменны.
При условии близких значений амплитуд рассматриваемых сигналов и
2 , можно записать
выполнения условия n c
52
pèí ò p( ).
(3.28)
Для определения p( ) рассмотрим два монохроматических колебания
u c (t) и u n (t) . Пусть относительная величина порога равна u cð =u 0 /u ñ .
Очевидно, что идеальная значения фазового сдвига между рассматриваемыми
колебаниями равны
u î u c2 +u 2n +2u c u n cosφ
.
Введем обозначение b = u n /u c и преобразуем (3.29) к виду
2
u ñð
- 1 - b2
cos φ
2b
,
откуда получим
φ arccos
(3.29)
(3.30)
2
u cð
-1-b 2
(3.31)
.
2b
Очевидно, что при выполнении условий (3.30) и (3.31) подавления
сигнала не происходит. Последние возможно при
2
u cð
-1-b 2
(3.32)
arccos
.
2b
Считая, что величина фазового сдвига между некоррелированным
сигналом и помехой распределена равномерно в 0...2 , получаем
2
1 + b2 - u cp
2π - 2φ 1
p(φ) = pèí ò =
= arccos
2π
π
2b
(3.33)
Так как cosφ 1 , то
2
1 + b2 - u cp
2b
1.
(3.34)
Определим соотношение между u ñð и b при интерференционном
подавлении. Из (3.34) имеем
2
1 + b 2 - u cp
2b
(3.35)
.
2
(b - 1) 2 u cp
Решая (3.35), получим
(b - 1) u cp ,
(3.36)
- (b - 1) u cp ,
(b-1) - u cp ,
- (b - 1)³u cp .
(3.37)
(3.38)
(3.39)
53
Из (3.36). (3.37) и (3.39) (исключая (3.38) неопределенность)
имеем b u cp + 1 ; b 1-u cp и b u cp +1.
Объединяя, получаем
1 - u cp b 1 + u cp
или
uc - u0 un u0 + u0 .
(3.40)
(3.41)
Таким образом, интервал изменений амплитуды помехи, который может
вызвать подавление, получается равным удвоенному значению порогового
напряжения u 0 .
С учетом приведенных соотношений, получим
1
2
u
+
1
u
4
2
pñï = 1 - Ô u +
×
2
3
2à
(2à)
3
(2a)
2
1 + b 2 - u cp
1 - λ ï τ0exp( -2λ ï τ 0 )arccos
2b
π
.
(3.42)
Для бинарного сигнала имеем
ðñï = pï υ1-î 1 +e1 ,
(3.43)
где
o1 - число нулевых позиций в синхрогруппе бинарного сигнала;
å1 - число единичных позиций в информационной группе.
Величина å1 - переменная и её значения могут меняться от нуля до μ 1 .
Поэтому полная вероятность прохождения сигнала через приёмник равна
p
ïîë
μ1
1
υ1 -î 1
= m1 pñï
cμe11 peñï1
2
e1 =o
(3.44)
.
Воспользовавшись биномом Ньютона, получим
pï î ë =
1
υ1 -î 1
μ1
p
(1
+
p
)
ñï
ñï
2μ1
,
(3.45)
где pñï описывает соотношением (3.42).
Для рассматриваемой ситуации представляет интерес выяснение среднего
числа срабатывания решающего устройства (N) за интервал наблюдения T. При
условии независимости воздействующих сигналов получим
54
N = N0 + Iï w v,τ ,
(3.46)
где N 0 - среднее значение срабатываний решающего устройства от шумов за
время Т;
Iï - среднее количество импульсов помехи на входе приёмника за время Т;
w v,τ - вероятность прохождения импульсной помехи;
τ - длительность импульсной помехи.
Из [48] для средней частоты выбросов огибающей нормального шума и
гармонического сигнала над уровнем u = u 0 с учетом допущения
w v,τ = v имеем:
σ ø ω
λ1 ( u 0 ) =
w1 ( u 0 )
2π
,
(3.47)
ω = 0,285 ω; ;
ω - ширина полосы пропускания приемника;
w1 ( u 0 ) - плотность вероятности огибающей нормально шума и
гармонического сигнала.
Считая, что выбросы над уровнем u 0 распределены по законы Пуассона
[21], будем иметь
где
p( 1,τ) = 1 - exp -λ1 ( u 0 )τ,
где τ - длительность временного интервала, равная длительности импульса
помехи. С учетом сделанных допущений запишем (3.36) в виде
N = N 0 + Iï v.
(3.48)
Определяя составляющие (3.48) предварительно отметим тот факт, что
внутренние и внешние шумы приёмника являются независимыми и,
следовательно, для дисперсии огибающей аддитивного шума верно
соотношение
2
σ02 = σø2 + σâø
Из [3] имеем
1
(3.49)
σ0 ωW1 ( u 0 )
2 6π
где W1 ( U 0 ) - плотность вероятности для значения шума, равного ? .
При прохождении через узкополосные фильтры приёмника шум
нормализуется, решающее устройства стоит после детектора, то в соответствии
с распределением Релея
u 02
u0
w1 ( u 0 ) = 2 exp (3.50)
2
σ0
2σ
0 .
N0 ( u 0 ) =
55
Подставляя (3.50) в (3.49) и введя обозначение q = u 0 /σ 0 получаем
q2
1
N B (q) =
ωqexp - .
(3.51)
2 6π
2
Существующие пороговые устройства срабатывают только от выбросов,
длительности которых не менее вполне определенной величины τ ì . Тогда
(3.51) запишем в виде
q1
1
N 0 (q)=
ωq exp - β(τ),
(3.52)
2
2 6π
где β(τ) - вероятность того, что длительность выброса не менее τ . Плотность
распределения длительностей выбросов случайного процесса, которая для
огибающей нормального узкополосного стационарного шума определяется в
соответствии с [17] как
1
1
(3.53)
W1 (τ,q)= ω02q 2 τ exp - ω02q 2 τ 2
4
8
позволяет рассчитать β(τ) в (3.53)
(ω - ω )
0
ω =
2
0
0
2
G(ω) dω
,
(3.54)
G(ω) dω
0
где
G(ω) - энергетический спектр шума;
ω 0 -рабочая частота УПЧ.
Считая G(ω) постоянной в пределах полосы пропускания приемника,
имеем
ω
ω
G(ω) = 2π / ω ,
;
ω0 ω ω0 +
2
2
ω
ω
G(ω) = 0 ,
.
ω0 > ω > ω0 +
2
2
1 2
Из (3.54) находим ω02 =
ω и подставляя в (3.53), получаем выражение
12
для плотности распределения длительности выбросов шума над относительным
порогом q
1
1
W1 (τ,q)=
ω2q 2 τ exp
ω2 q 2 τ 2 .
(3.55)
48
96
С учетом (3.55) имеем
Vω2q 2
1
1
(3.56)
β(τ)=
τ exp ( - ω2q 2 τ 2 )dτ = exp ( ω2q 2 τ ì2 ).
48 τn
96
96
Подставляя (3.56) в (3.52), окончательно получаем
56
1
1 2
(3.57)
ωq exp q (48+ ω2 τì2 ) .
96
2 6π
Результаты экспериментальных исследований подтверждают высокую
достоверность найденного выражения. Для определения W воспользуемся
соотношением (3.23). Полагая a = a1 = A ï /σ и u = u1 = z - a1 где A ï -амплитуда
импульсной помехи, будем иметь
(3.58)
W1 = 1 - Ô u1 -η (a1-1 ) .
N0 (q) =
Обозначим среднее количество импульсов
срабатывание решающего устройства, через I1 . Тогда
I1 = In 1 - Ô u1 - η (a1-1 ) .
помехи,
вызвавших
(3.59)
Подставляя (3.57) и (3.58) в (3.48), получаем для среднего количества
срабатываний решающего устройства от шумов и помех
1
1 2
N=
ωq exp q (48 + ω2 τ ì2 ) + I1 1 - u1 - η(a1-1 ) . (3.60)
2 6π
96
3.4. Влияние помех на показатели качества функционирования ТКС
Системная оценка качества функционирования РЭС может быть
проведена при условии, что показатели качества (ПК) ТКС, по существу,
являются элементами, образующими вектор-функционал Lê (целевая функция)
полностью определяющий пространство состояний, в котором находиться
рассматриваемое средство. Можно записать, что
(3.61)
Lê = Lê x1,x 2 ,…,x n ,…,x ê
где x n - n – й РЭС.
В общем случае можно считать, что РЭС имеет k TTX, т.е. в качестве
элементов x n могут выступать вероятность обнаружения, дальность, точность,
коэффициент готовности и т.п.
Скалярное представление (3.61) может быть выражено в виде
комплексного показателя качества (КПК) β ,определяемого в соответствии с
[32] следующим выражением:
1
β= γ êê
ê=1
где
где
- количество локальных ПК;
- весовой коэффициент предпочтительности К-го ЛПК.
Практически β - определяется в виде:
Ãê ê
Ãê = γ1,γ 2 , , γ ê матрица весовых коэффициентов групп ЛПК;
(3.62)
57
1
ê 2 - матрица собственных значений ЛПК.
3
В общем случае
ê = Fnm Vm ,
(3.63)
где
Vm - матрица весовых коэффициентов параметров РЭС, входящих в К–
групп ЛПК;
Fnm - матрица нормированных значений параметров в РЭС.
φ
F11φ ,F12φ ,…F18φ ,…F1m
F110 υ ,0,. . .
φ
F21φ ,F22φ ,…F28φ ,…F2m
0,F120 υ ,. . .
. . . . . . . .
.......
,
(3.64)
φ
0,0,...,Fêì0 υ
Fê1φ ,Fê2φ ,…Fêdφ ,…Fêm
где а , b , . . .d – число параметров РЭС, входящих в соответствующие группы
ЛПК, причём a + b + . . . + d = m;
Fêm - значение m – го параметра К – й группы ЛПК, для (3.61)
Fêm = x n ;
î
Fêm - значение m – го параметра К–й группы ;
φ
- опорное значение m – го параметра К–й группы ;
Fêm
φ = ± I, = ± I соответственно
для
максимизируемых
и
минимизируемых параметров.
Подставляя (3.63), (3.64) в (3,62), получаем
φ
F11φ ,F12φ ,…F18φ ,…F1m
F11 ,0,. . . V1
φ φ
φ
φ
V
F
,F
,…F
,…F
0,F
,.
.
.
2
28
2m
12
β= γ1 ,γ 2 ,…,γ ê 21 22
(3.65)
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Fφ ,Fφ ,…Fφ ,…Fφ
0,0,...,Fêì Vm
êd
êm
ê1 ê2
Очевидно, что воздействия НЭМП адекватно снижению величины β , что
может быть учтено введением специальной корректирующей матрицы Ï ,
оценивающей снижение количественных значений параметров, образующих
φ
(3.61), точнее изменение параметров Fêm
.
При этом корректирующая матрица может быть получена при
определении отношения сигнал/помеха + шум и сравнении его с пороговым.
Элементы корректирующей матрицы, безусловно, являются функционально –
зависимыми от отношения сигнал/помеха (с/п). Тогда
58
n1(c/n)
n (c/n)
Ï = 2
. . . . . .
n m(c/n)
Вводя вспомогательный сомножитель
P = Lm Ï
(3.66)
и подставляя соответствующие значения в (5.5), получаем величину β n которая
и позволяет произвести комплексную оценку влияния НЕМП на
рассматриваемое РЭС.
Кроме этого, используется и другие ПК функционирования РЛС, РНС и
радиосвязных систем. Они используются при проведении двух этапов
исследования ЭМС. Первый этап традиционно называется этапом исследования
качества функционирования РЭС в сложившейся или прогнозируемой ЭМС,
характеризуемой уровнем НЭМП в точке приема в широкой полосе частот.
Второй этап характеризуется выработкой организационно – технический
рекомендаций и мероприятий по обеспечению ЭМС РЭС.
При условии, что функция полезности РЭС монотонно зависит от
вероятности поставленных задач, можно записать, что:
ð(ê)
óï (ï ,ø ) = ð ê (ï )ð óï
где
(ê)
(ï ,ø ) + 1-ðê (ï ) ð (ê)
óï (ø ),
(3.67)
ð(ê)
óï (ï ,ø ) - ПК функционирования РЭС и в условиях воздействия НЭМП;
ðê (ï ) - вероятность воздействия НЭМП с уровнем выше допустимого;
(ê)
вероятности решения поставленных задач в условиях
ð óï (ï ,ø ), p(ê)
óï воздействия смеси П + Ш или только Ш соответственно.
При выборе единого ПК чаще всего пользуются величиной защитного
отношения сигнала/помеха
ε çàù , определяемого из выражения:
pï .äî ï =ðñ /εçàù
(3.68)
3.5. Обоснование защитных отношений сигнал/(шум+омеха). В случае
обработки аналоговых и цифровых сигналов.
Пусть на типовой ПРМ (рис. 1.7) воздействуют аналоговые сигналы, а
огибающая выделяется на линейном детекторе. Тогда входные воздействия
запишем в виде:
U c âõ (t) = U c âõ f c (t)cos ωc t
(3.69)
U n âõ (t) = U n âõ f n (t)cos ωn t
(3.70)
где f i - i–я соответствующая модулирующая функция.
F = Ω / 2π при глубине
Например, при модуляции тоном частоты
модуляции m
59
(3.71)
fi (t) = 1+mi cos Ωi t.
Также считаем, что НЭМП частично или полностью воздействует по
ОКП ПРМ, а ωn - ωc = ωp . Опуская зависимость от t для мгновенных значений
сигналов, запишем после элементарных преобразований суммарный результат
входного воздействия с учетом (3.69) и (3.70) в виде:
U? âõ =U c âõ +U n âõ = U c âõ f c (t)+U n âõ f n (t)cosωp t cos ωc t - U nâõ f n (t)sinωp t sinωc t
Возводя в квадрат, имеем:
(3.72)
A2 = Uñ2 âõfñ2 (t) + U2n âõf n (t) + 2Uc âõ Un âõfc (t) × fn (t) cos ωp t.
Введем обозначения:
U f (t)
(3.73)
Z = n âõ n
= Ê âõ f n (t)/f c (t),
Uc âõ f c (t)
-1
где Ê âõ = qâõ
= Un âõ / Uc âõ и θ = π = ωp t.
Подставляя (3.73) в (3.72) с учетом введенных переменных, получим:
(3.74)
A 2 = U ñ2 âõ f c2 (t) 1+Zi -2Z cos θ .
При коэффициенте передачи, равном единице, напряжение на выходе ЛД
для удобства
последующих преобразований запишем следующие
промежуточные переменные:
(3.75)
Uâû õ = À2 /À = Uc âõ f c (t) a 2 /a.
Тогда в соответствии с (3.74) запишем
(3.76)
a 2 = 1+Z2 - 2Z cos θ.
В случае отсутствия модуляции сигналов, т.е. при f c (t) = f n (t) = I , а
Z = Ê âõ , имеем:
(3.77)
Uâû õ = Uñâõa 02 /a 0
2
2
(3.78)
a 0 = 1 + K âõ - 2K âõ cos θ.
При условии, что q âõ > I ( K âõ < I ) , т.е. при U ñ âõ > U n âõ , величина a01 ,
входящая в (3.77), может быть в соответствии с [14] представлена в виде
полинома Лежандра.
С учетом (3.78) запишем:
2
a -10 = (1 + K âõ
- Ê âõ cos θ)1/2 =Ð0 (cos θ) + Kâõ P1 (cos θ) +
2
q
+ K âõ
P2 (cos θ) + . . . + K âõ
Pq (cos θ) .
Подставляя данное выражение в (3.77) и опуская запись аргумента у
членов полинома, получим:
2
2
q
U âû õ = U c âõ (1 + K âõ
- 2Ê âõ cos θ) P0 + K âõ P1 + K âõ
P2 + . . . + K âõ
Pq =
2
= Ucâõ [ P0 + (P1 - 2P0cos θ)Kâõ + (P0 - 2P1cos θ + P0 )Kâõ
+
(3.79)
q
+ . . . + (Pq-2 - 2Pq-1cos θ + Pq )Kâõ
].
60
Из [23] известно, что (q + 1)Pq+1 - cos θ (2q + 1)Pq + q Pq-1 = 0, тогда
нетрудно заметить, что
(3.80)
Pq+1 - 2Pqcos θ + Pq-1 = (Pqcos θ - Pq+1 )/q.
Кроме этого, для первых членов полинома Лежандра справедливы
равенства
P0 (cos θ) = 1 , P1 (cos θ) = cos θ.
(3.81)
После подстановки (3.80) и (3.81) в (3.79) получим:
2
U âû õ = U câõ 1 - K âõ cos θ + (P1cos θ - P2 ) K âõ
+
2
2
+ (Pqcos θ - Pq )Kâõ
/2 + . . . + (Pq-1cos θ - Pq )Kâõ
/q-1.
В свою очередь заметим, что
1-cos 2θ dPq-1
- sinθ dPq-1
Pq-1 cosθ - Pq =
=
.
q d(cosθ)
q
dθ
С учетом вышесказанного (3.82) преобразуем к виду:
Uâû õ = Ucâõ 1 - K âõ cos θ - Kâõsin θ
2
q
dPq
dPq
K âõ dPq
K âõ
K âõ
+
+...+
+ . . . .
2 3 dθ
q(q+1) dθ
2 dθ
(3.82)
(3.83)
Если же НЭМП и полезный сигнал модулированы, то в (3.83) необходимо
провести обратную замену, т.е. вместо K âõ записать величину Z ,
определяемую в соответствии с (3.71) и (3.73). При это очевидно, что
необходимым стало выполнения условия :
1 + mn cosΩ n t
(3.84)
Z = K âõ
.
1 - mccosΩc t
Учитывая тот факт, что большого числа РЭС ГА среднее значение
коэффициентов глубины модуляции как полезного, так и помехового сигналов
не превышает 0,3, нетрудно установить условие выполнения (3.84):
Ê âõ < 0,583 или q âõ > 1,859.
Если учесть, что фильтры на выходе ЛД не пропускает постоянную
составляющую и некоторые компоненты спектра, и, если ширина полосы
фильтра f 0 < 2f p , причём f p < Fn , m n 0,3 и m ñ 0,3 , то получим:
2
U âû õ 1 U ñ âõ mccosΩc t + 0,5m n K âõ
cosΩ n t +
+Ê âõ cosωp t + 0,5m n K âõ cos(Ω n ±ωp )t
(3.85)
Часто пользуются критерием устойчивости качественных показателей
(УКП), определяемым как выходное отношение сигнал/помеха ко входному,
т.е.
j = Qâû õ / Qâõ .
(3.86)
Определим его для рассматриваемого случая
61
1
Qâõ = 2
K âõ
2=m c2
2+m 2n
(3.87)
1
4mc2
(3.88)
Qâû õ = 2
2
K âõ 4 + mn2 + K âõ
+ mn2
Подставляя найденные выражения в (3.86) и считая, что расстройка
между несущими частотами не превышает полосу пропускания фильтра, т.е.
f 0 < 2f p , имеем:
4mc2 (2 + m2n )
(3.89)
j=
.
2
(2 + mc2 )(4 + mn2 K âõ
+ mn2 )
С учетом того, что достаточно часто встречается ситуация, когда
m n = m c = m , (3.89) преобразует к виду:
4m2
j=
2
4 + m2K âõ
+ m2
Если f p > f? > f p - f n , то несложно получить, что
2
U âû õ U c âõ mccosΩ0 t + 0,5mn K âõ
cosΩn t + 0,5mn K âõ cos(ωp - Ωn )t
По аналогии с предыдущими выкладками получим:
4mñ2 (2 + m2n )
j2 =
.
2
(2 + mñ2 )(1 + K âõ
)
При m n = mc = m , (3.92) преобразует к виду:
(3.90)
(3.91)
(3.92)
2
(3.93)
j2 = 4/(1 - K âõ
).
Из (3.85) следует, что при отсутствии модуляции на выходе ЛД
подавляется составляющая
с f p = ωp /2 .
При анализе функционирования цифровых систем критерий УКП
записывается в виде:
(3.94)
j = Pî ø /Pî*ø
где Pî ø , Pî*ø - вероятности ошибок передачи информационного сообщения в
случае отсутствия и наличия помеховых воздействий соответственно.
Будем считать, что полезный сигнал модулирован по амплитуде
двоичным цифровым сообщением и имеет место одновременное воздействие
помех и внутренних шумов. Необходимо отметить, что в данном случае на
выходе ПРМ находиться решающее устройства (РУ), работающее по методу
стробирования, т.е. анализирующее напряжение ЛД (демодулятора) в моменты
времени, соответствующие t k = t 0 + êÒ. где Т – промежуток времени между
отсчётами, а tî - время, соответствующее положению символа в тактовом
интервале. Полезный сигнал на входе детектора в соответствии с [17] запишем
в виде:
62
Uc âõ (t)=Uc
где
где
a b(t - êÒ)cos ω t
ê =-
ê
c
(3.95)
b(t) - функция, определяющая форму огибающей символа на входе;
aê - дискретная величина, принимающая значение, равное либо I , либо 0 ;
К- номер символа.
В свою очередь, НЭМП на входе детектора:
(3.96)
Un âõ (t) = Un cos ωn t + υn (t) + φ0 ,
φ 0 - начальная фаза;
υ n (t) -случайный процесс, характеризующий фазовую модуляцию помехи.
С учетом ωp = ωn - ωc и вводя обозначение
Ψn = ωp t + υn (t) + φ.
Запишем (3.96) в виде:
U n âõ (t) = ReUe j n e jω0t
(3.97)
(3.98)
Введем определение, характеризующее сумму сигнал + помеха,
аналогичное (3.13):
(3.99)
b2 = Uc2aê2 + U2n + 2Un Uca ê cosΨn
При условии, что f 0 ωc /2π , собственные шумы на входе ЛД можно
считать узкополосным стационарным случайным процессом, имеющим
нормальное распределение [3]
U nâõ (t) = x(t)cosωc t + Y(t)sinω0 t = Re x(t) + jY(t) e jω0t .
(3.100)
Здесь X (t ) и Y (t ) - нормальные случайные стационарные процессы с
одинаковой дисперсией 2 , равной дисперсии процесса U ø âõ (t ) .
Определим вероятность ошибки при приеме символа с номером
соответствующим паузе P(1/ 0) . При этомU cø ï 0 .
Очевидно, что данная ошибка (ложные тревоги) может иметь место в том
случае, когда на входе ЛД напряжение U , определяемое в общем случае С, П и
Ш, превысит некоторое пороговое напряжение U ï î ð РУ, т.е. при условии:
U Uï î ð .
Учитывая независимость процессов, определяющих U , и усреднений по
всем возможным значениям, запишем:
2
P(1 / 0) P(U U ï î ð )
P(1 / 0;U ;
n
n
)W (U n )W ( n )dU n d n ,
(3.101)
0 0
где W (U n ) - функция распределения огибающей помехового сигнала на входе
ЛД;
P (1 / 0;U n ; n ) - вероятность условий ошибочного приема при
фиксированных значениях U n и n соответственно.
63
Функция плотности вероятности огибающей суммарного сигнала
распределена по обобщенному закону Рэлея:
U 2 B 2 U B
U
(3.102)
W (U / 0;U ï ; n ) 2 exp
I0
.
2 2 2
При известных значениях полосы пропускания f и энергетического
спектра G дисперсия собственных (тепловых) шумов равна: 2 Gf .
Учитывая (3.102), имеем:
P(1 / 0;U n ; n )
W (U
/ 0;U ï ; n )dU .
(3.103)
uï î ð
Интеграл в правой части (3.103) с учетом (3.102) может быть представлен
через функцию распределений Райса-Релея – это справочная Q -функция [9].
t2 2
Q( , ) tI 0 ( t )exp
dt.
2
(3.104)
Тогда:
P(1 / 0;U n ; n ) Q[(U n / );( B / )].
(3.105)
Следует отметить, что процесс n будет иметь равномерное
распределение на интервале [ ; ] . Это следует из (3.96), т.к. 0 также имеет
равномерное распределение в интервале [ ; ] . Таким образом:
W ( n ) 1 / 2 .
(3.106)
Следовательно, с учетом (3.102)…(3.106) вместо (3.101) получим:
2
1
U B
(3.107)
P(1 / 0)
Q n ; W (U n )dU n d n .
2 0 0
Обозначим
U B
U B
q n ; 1 Q n ; .
Тогда вероятность пропуска символа:
2
1
Un B
(3.108)
P(1 / 0) 1 P(0 / 1)
q
; W (U n ) dU n d n .
2 0 0
Если считать, что веса найденных вероятностей одинаковы (критерий
среднего риска), то
(3.109)
Pcp 0,5[ P(1/ 0) P(0 / 1)].
При условии, что число воздействующих на РЭС источников помех N ï ,
выражение (3.109) в соответствии с [14] выглядит следующим образом:
64
где A0 , B0 , C0
полосы УПЧ;
B0QT Qâõ
,
(3.110)
Pî ø À0 exp
2
C
N
1
2
0
0
QT Qâõ
2
N
ï
- коэффициенты, зависящие от метода приема, вида помех,
QT Pcâõ Pø âõ ;
Qâõ Pcâõ
N
P
i 1
ï âõl
.
Полученные соотношения позволяют оценить изменение ПК РЭС и
определить защитное отношение сигнал/(помеха + шум).
Вопросы для самопроверки
1. Приведите частотный анализ возможных воздействий НЭМП на РЭО,
находящихся в районе а/п.
2. Каким образом можно найти вероятность воздействия помехи на РЭС?
3. Как оценивается мощность межсистемных помех?
4. Дайте определение помех, сосредоточенных во времени.
5. К чему приводит одновременное воздействие помех и сигнала на приемоанализирующий тракт?
6. Приведите алгоритм вероятностных оценок результатов воздействия помех.
7. Как сказываются выбросы выходного сигнала приемо-анализирующего
тракта на качество их работы?
8. Приведите алгоритм оценки влияния помех на качество функционирования
РЭО.
9. Что такое защитное отношение сигнал/(шум+помеха)?
10. Чем определяется допустимый уровень НЭМП?
11. Раскройте критерий УКП для цифровых систем.
12. Приведите пример оценки вероятности ошибок в случае воздействия помех
при использовании критерия среднего риска.
65
ЗАКЛЮЧЕНИЕ
Материал пособия позволяет обучающемуся уяснить сущность и
особенности проблемы ЭМС радиоэлектронных систем и комплексов ГА,
ознакомиться с некоторыми математическими моделями характеристик ЭМС
приемопередающей аппаратуры, параметрами паразитных каналов излучения и
побочных каналов приема.
В резульатате роста числа связей, по которым циркулируют
информационные потоки, который в свою очередь, значительно опережает
количество функциональных элементов рассматриваемых систем, возрастает
объем информационных потоков (I) в любой сложной системе. Так, например,
если число элементов сложной системы равно N, то объем информационного
потока I можно описать соотношением I kN , где k 1, [2;2,5] .
Общая теория ЭМВ РЭО рассматривает поведение множеств
радиоэлектронных объектов, определенным образом взаимодействующих друг
с другом и со средой.
Исследование одиночного объекта РЭО или группировки РЭС может
выполняться в различных аспектах, с каждым из которых сопряжены
определенные понятия и классификационные признаки. Наиболее
существенными
из
них
выступают
структурный,
динамический,
функциональный и эволюционный аспекты.
Наряду с вышесказанным необходимо также иметь в виду то
обстоятельство, что дестабилизация ЭМО негативно сказывается на
достоверности, целостности и защищенности информационных потоков, что, в
конечном итоге, неблагоприятно влияет на общее состояние авиационной
безопасности.
66
ЛИТЕРАТУРА
1. Теория
и
методы
оценки
электромагнитной
совместимости
радиоэлектронных средств / Под ред. Ю.А. Феоктистова. – М.: Радио и
связь, 1988.
2. Анализ риска столкновений при УВД. Отчет ГАА. Документ LC/17 –
Монреаль, 2006.
3. Горяинов В.Т., Журавлев А.Г., Тихонов В.И. Примеры и задачи по
статистической радиотехнике. – М.: Сов. радио. 1989.
4. Агаджанов П.А., Воробьев В.Г., Кузнецов А.А., Маркович Е.Д.
Автоматизация самолетовождения и управление воздушным движением. М.: Транспорт, 1980.
5. Емельянов В.Е. Электромагнитная совместимость радиоэлектронного
оборудования ГА. Учебное пособие. – М.: РИО МГТУ ГА, 1994.
6. Международное совещание по связи. ICAO, DOC COM-81-P/5 12/1/81. –
Монреаль, 1981.
7. Уайт Д. Электромагнитная совместимость радиоэлектронных средств и
непреднамеренные помехи. Пер. с англ., т. I. – М.: Сов. радио, 1977.
8. Электромагнитная совместимость радиоэлектронных средств и систем / Под
ред. Н.М. Царькова. – М.: Радио и связь, 1985.
9. Апорович А.Ф. Статистическая теория электромагнитной совместимости
радиоэлектронных средств. – Минск: Наука и техника, 1994.
10. Князев А.Д. Элементы теории и практики обеспечения электромагнитной
совместимости радиоэлектронных средств. – М.: Радио и Связь, 1984.
11. Михайлов А.С. Измерение параметров электромагнитной совместимости
радиоэлектронных систем. – М.: Связь, 1990.
12. Кремер И.Я. , Владимиров В.И., Карнухин В.И. Моделирующие
(мультипликативные) помехи и прием радиосигналов. – М.: Сов. Радио,
1972.
13. Харкевич А.А. Основы радиотехники. – М.: ФИЗМАТЛИТ, 2007.
14. Егоров Е.И., Калашников Н.И., Михайлов А.С. Использование
радиочастотного спектра и помехи. – М.: Радио и связь, 1986.
15. Голубев В.Н. Оптимизация главного тракта приема радиочастотного
спектра и помехи. – М.: Радио и связь, 1982.
16. Нормы на ширину полосы радиочастот и внеполосные излучения
радиопередатчиков гражданского назначения. – М.: ГКРЧ, 2002.
17. Тихонов В.И. Статистическая радиотехника. – М.: Радио и связь, 1992.
18. Певницкий В.П., Полозок Ю.В. Статистические характеристики
индустриальных помех. – М.: Радио и связь, 1988.
19. Антенно-фидерные устройства и распространение радиоволн / Под ред. Г.А.
Ерохина. – М.: Радио и связь, 1996.
67
20. Иванов В.А., Ильницкий Л.Я., Фузик М.И. Электромагнитная
совместимость радиоэлектронных средств. – Киев: Техника, 2003.
21. Коваленко И.Н., Кузнецов Н.Ю., Щуренков В.М. Случайные процессы. –
Киев, Наумова думка, 1983.
22. Емельянов В.Е. Учет влияния непреднамеренных помех на показатели
качества РАС УВД. Межв. сб. научных трудов. Проблемы технического
обеспечения систем УВД. – М.: РИО МИИГА, 1984, с.76…78.
23. Корн Г., Корн Т. Справочник по математике. – М.: Наука, 1978.
24. ГОСТ 30 372 95. Совместимость технических средств электромагнитная.
Термины и определения.
25. Закон РФ «О связи», №126-ФЗ от 7 июля 2003г.
68
СОДЕРЖАНИЕ
Введение .....................................................................................................................
1.Основные понятия и характеристики ЭМС РЭО ................................................
1.1.Классификация электромагнитных помех ....................................................
1.2.Характеристики излучения радиопередающих устройств .........................
1.3.Основной и побочный каналы приема ..........................................................
2.Математические модели для амплитудной и частотной оценки
восприимчивости приемо-анализирующих трактов по побочным каналам
приема .........................................................................................................................
2.1.Модели оценки характеристик частотной избирательности ......................
2.2.Модели для описания параметров ЭМС антенно-фидерных устройств ...
3.Электромагнитная обстановка в аэропортах ГА .................................................
3.1.Влияние ЭМО на характеристики информационных потоков ...................
3.2.Особенности учета уровня межсистемных помех .......................................
3.2.Вероятностная оценка результата воздействия помех ................................
3.4.Влияние помех на показатели качества ТКС ...............................................
3.5.Обоснование защитных отношений сигнал/(шум + помеха) в случаях
обработки аналоговых и цифровых сигналов ....................................................
Заключение.................................................................................................................
Литература .................................................................................................................
69