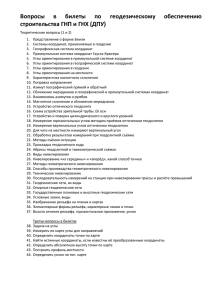
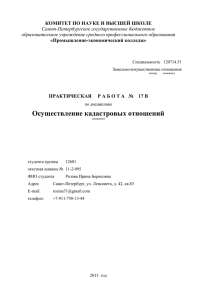
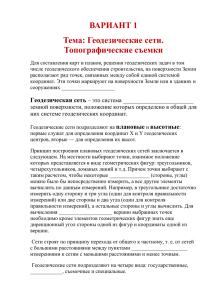
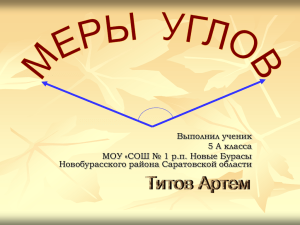
Геодезические опорные сети и методы их построения. 1 Плановые геодезические сети а) Классификация плановых геодезических сетей Инженерно-геодезические работы сопровождают практически все этапы инженерно-строительного производства. Поэтому требуется наличие на местности исходных точек, у которых определены координаты и высоты с соответствующей точностью. Точка, закреплённая на местности, с определёнными координатами и высотами называется г е о д е з и ч е с к и м п у н к т о м. Совокупность геодезических пунктов, положение которых определено в общей для них системе координат, называют г е о д е з и ч е с к о й с е т ь ю. Геодезические сети подразделяются на плановые и высотные. К плановым сетям относятся сети геодезических пунктов, у которых определены с соответствующей точностью прямоугольные координаты. Плановые геодезические сети подразделяются на следующие виды: - государственную геодезическую сеть ( ГГС ); - геодезические сети сгущения ( сети местного значения ); - съёмочные геодезические сети ( плановое съёмочное обоснование ); - специальные геодезические сети, развиваемые при строительстве сооружений. Государственная геодезическая сеть, являющаяся главной геодезической основой всех топографо-геодезических работ, подразделяется по точности на четыре класса: - пункты сети 1 класса; - пункты сети 3 класса; - пункты сети 2 класса; - астрономические пункты Лапласа - базисы Рисунок 1- Схема построения ГГС 1, 2, 3 классов а) ГГС 1 класса имеет наивысшую точность определения координат пунктов и охватывает всю территорию страны. Сеть 1 класса строится в виде полигонов периметром 800 - 1000 км ( рисунок 1 ), образуемых звеньями длиной порядка 200 км, расположенными по возможности вдоль меридианов и параллелей, представляющими собой треугольники, близкие к равносторонним, или комбинации треугольников, геодезических четырёхугольников и центральных систем. На концах звеньев триангуляции 1 класса измеряют базисные стороны, которые опираются на так называемые пункты Лапласа, широта, долгота которых и азимуты базисных сторон определяются из астрономических наблюдений. б) ГГС 2 класса строится внутри полигонов 1 класса в виде сплошных треугольников или пересекающихся ходов полигонометрии. Внутри полигонов 1 класса на нескольких пунктах 2 класса производятся астрономические определения широты, долготы и азимута. в) ГГС 3 и 4 классов создаются относительно пунктов высших классов и предназначены по существу для сгущения государственной сети до необходимого количества пунктов с целью проведения работ по картографированию страны. ГГС различных классов различаются длинами сторон, точностью измерения углов, азимутов и длин линий. Характеристики ГГС по классам точности в таблице1. Таблица 1 - Характеристика ГГС по классам точности Класс геодезической сети 1 2 3 4 Метод построения сети Длина стороны, км Триангуляция Полигонометрия Триангуляция Полигонометрия Триангуляция Полигонометрия Более 20 20-25 7-20 Триангуляция Полигонометрия Точность измерения Астрономического азимута 0".5 Горизонтального угла Базисной стороны Стороны хода 0".7 1:400000 - 0 .5 0 .5 0 .4 1 .0 1:300000 1:300000 - 5-8 0 .5 - 1 .0 1 .5 1:200000 1:250000 - 3 - 1 .5 - 1:200000 2-4 0.25-2.0 - 2.0 2.0 1:100000 - 1:100000 Геодезические сети сгущения (сети местного значения) служат для дальнейшего сгущения ГГС и являются геодезическим обоснованием для топографических съёмок в масштабах 1:5000 – 1:500 и инженерногеодезических работ. Они создаются путём построения на местности: - аналитических сетей 1, 2 разрядов ; - полигонометрических сетей 1, 2 разрядов. Геодезические сети местного значения создаются, как правило, между сторонами и пунктами ГГС. Пункты этой сети являются, как правило, исходными при создании съёмочных геодезических сетей. Съёмочные геодезические сети представляет собой сеть пунктов, опирающихся на пункты старших классов с которых непосредственно выполняется съёмка местности. Эти сети создаются вследствие недостаточности пунктов ГГС и пунктов сетей сгущения (местного значения) для выполнения съёмки в районе строительства. Наиболее часто съёмочные геодезические строят проложением теодолитных ходов, а также путём развития аналитических сетей, т.е. сетей, создаваемых методам триангуляции, построением отдельных треугольников, центральных систем, четырёхугольников, засечками – прямой, обратной , комбинированной. Специальные геодезические сети развиваются при строительстве сооружений, предъявляющих к геодезическим работам специальные требования, например, при строительстве крупных гидротехнических сооружений ( гидроэлектростанций ), прецезионных ( высокоточных ) инженерных сооружений. б) Закрепление пунктов геодезических сетей Пункты ГГС и геодезических сетей сгущения закрепляются на местности таким образом, чтобы долгосрочно была обеспечена их сохранность. Для этого их закрепляют специальными подземными центрам и. В зависимости от физико-географических условий и грунтов применяются различные конструкции центров и закладка их производится на различную глубину. Например, для районов промерзания грунта до 1.5 м центр имеет вид, показанный на рисунок 2. Для обеспечения видимости между смежными пунктами устанавливают наружные геодезические знаки – деревянные и металлические сигналы и пирамиды ( рисунок 3 ). Закрепление пунктов съёмочных сетей осуществляют в основном временными знаками – деревянными кольями, обрезками металлической арматуры, трубами и т.п. Опознавательный столб 0.70 0.50 1.30 2.20 Глубина промерзания грунта 0.20 Рисунок 2 - Центр геодезического пункта Визирные цилиндры Сигнал Инструментальный столик Пирамида Центры Рисунок 3 - Наружные геодезические знаки 2 Методы построения плановых геодезических сетей Конечной целью построения плановых геодезических сетей является определение прямоугольных координат геодезических пунктов. Обработка измерений и вычисление координат при этом основано на решении прямой и обратной геодезических задач. Вопрос о решении обратной геодезической задачи рассмотрен ранее. Сущность решения прямой геодезической задачи ( рисунок 4 ) состоит в том, что по координатам исходного пункта А( ХА,УА ), расстоянию между исходным пунктом и определяемым dAB и дирекционному углу направления с исходного пункта на определяемый АВ вычисляют координаты определяемого пункта В (XВ,УВ) XВ = ХА + dAB cos АВ, УВ = УА + dAB sin АВ . B (XВ,УВ) Х АВ dAB А ( ХА,УА ) У Рисунок 4 - Сущность решения прямой геодезической задачи Плановые геодезические сети строятся, как правило, методами триангуляции, полигонометрии, трилатерации, прямой, обратной, комбинированной засечками и другими методами. а) Построение плановых сетей методом триангуляции Сущность метода триангуляции заключается в построении плановой геодезической сети в виде примыкающих друг к другу треугольников, в которых измеряют все горизонтальные углы и длину хотя бы одной стороны, например, b, называемой базисом ( рисунок 5 ). С k D 5 6 8 n 2 АС b a m 4 1 А 9 3 c 7 E q B Рисунок 5 - Построение плановой сети методом триангуляции В основе метода триангуляции лежит решение треугольника по стороне и двум углам – теорема синусов. Процесс определения координат пунктов триангуляционной сети в принципе заключается в следующем: - в результате многократного последовательного применения теоремы синусов ко всем треугольникам вычисляют длины сторон всей триангуляционной сети, в которой каждый последующий треугольник связан с предыдущим общими сторонами, например, а, m, n и т.д. Например, вычисление промежуточной стороны с и связующей а выполняют по формулам с / sin 2 = b / sin 3, с = b sin 2 / sin 3, a /sin 1 = b / sin 3, a = b sin 1 / sin 3; - находят суммы углов в треугольниках, определяют угловую невязку, поправки в измеренные углы, вводят их в измеренные углы и вычисляют исправленные ( уравненные ) углы в треугольниках; - вычисляют дирекционные углы промежуточных и связующих сторон по заданному исходному дирекционному углу АС и уравненным горизонтальным углам треугольников. Например, дирекционные углы сторон АВ и ВС - АВ и ВС вычисляют по формулам АВ = АС +1/ , ВС = АC ± 1800 + 3/, где 1/ , 3/ - уравненные горизонтальные углы; - определяют координаты пунктов триангуляционной сети путём решения прямых геодезических задач. Например, координаты пунктов B и C вычисляют по формулам XВ = ХА + c cos АB, УВ = УА + c sin АB, XС = ХA + b cos CB , УС = УA + b sin CB и т д. б) Построение плановых сетей методом полигонометрии Полигонометрия – метод построения геодезической сети в виде системы замкнутых или разомкнутых ломаных линий, в которых непосредственно измеряют углы поворота i и длины сторон d i ( рисунок 6 ). D C К Н 1 2 3 B 0 A d1 1 d2 2 d3 3 d4 B Рисунок 6 - Построение плановой сети методом полигонометрии Горизонтальные углы измеряют теодолитами со ср.кв.ош. не более 10 ", а длины линий - шкаловыми лентами, мерными проволоками и светодальномерами с относительной ошибкой, не менее 1:10000. Полигонометрический ход опирается на исходные пункты в начале хода и в конце ( например, А и В ), имеющие координаты ( ХА,УА ; ХВ,УВ ) и дирекционные углы ( Н, К ). Координаты точек полигонометрического хода в принципе получают из решения прямых геодезических задач, например, X1 = ХА + d1 cos А-1, У1 = УА + d1 sin А-1, X2 = Х1 + d2 cos 1-2, У2 = У1 + d2 sin 1-2, X3 = Х2 + d3 cos 2-3, У3 = У2 + d3 sin 2-3 , X4 = Х3 + d4 cos 3-В , У4 = У3 + d4 sin 3-В . Дирекционные углы, входящие в приведенные соотношения, вычисляют по формулам А-1 = Н ± 1800 ± 0, 1-2 = А-1 ± 1800 ± 1, 2-3 = 1-2 ± 1800 ± 2, 3-4 = 2-3 ± 1800 ± 3, в которых знак " + " перед значением угла ставят в случае, когда измеряют левые по ходу углы, а знак " - " - в случаях, когда измеряют правые по ходу углы. Полигонометрические ходы представляют собой вытянутые ломаные линии, углы поворота в которых близки к 1800. в) Построение плановых сетей методом трилатерации Трилатерация – метод построения плановой геодезической сети в виде треугольников, в которых измеряют длины всех сторон ( рисунок 7 ) Из решения их определяют горизонтальные углы в треугольниках. B c D b 0 A ( ХА,УА ) m n а С Рисунок 7 - Сущность метода трилатерации Горизонтальные углы в треугольниках, например, угол А в треугольнике АВС вычисляют по формуле тангенса половинного угла tg 2 A/2 = ( p-b )(p-c )/p ( p-a ), где а, b, с – длины сторон треугольника, а р - его полупериметр р = 0.5 ( а + в + с ), или по теореме косинуса угла cos A =( а2 + с2 – b2 ) / 2ac. В этих сетях тоже должны быть исходные пункты с известными координатами и исходными дирекционными углами, например, пункт А. Зная исходные дирекционные углы, длины сторон в треугольниках и вычисленные горизонтальные углы определяют координаты вершин треугольников, решая в принципе прямые геодезические задачи. 3 Создание сети планового съёмочного обоснования Изобразить участок местности на листе бумаги в виде топоплана можно, выполнив измерения на пунктах с известными координатами и высотами – на пунктах съёмочной сети. Создание сети съёмочного обоснования имеет целью: - сгущение геодезической сети до густоты пунктов, необходимой для выполнения топографической съёмки в заданном масштабе; - создание геодезической основы для выполнения инженерногеодезических работ различного характера и назначения - изысканий, перенесения проектов в натуру, привязки геологических выработок и т.п. Съёмочное обоснование развивается на основе пунктов ГГС и сетей сгущения местного значения. В отдельных случаях съёмочное обоснование развивается в местной системе координат. Для определения координат пунктов съёмочного обоснования используются методы полигонометрии и триангуляции. Сети планового съёмочного обоснования, развиваемые методом триангуляции, называют аналитическими сетями. а) Создание планового съёмочного обоснования построением аналитических сетей Аналитические сети строятся в виде отдельных треугольников, центральных систем, четырёхугольников, цепей треугольников между сторонами или пунктами опорной сети высшего класса. К аналитическим сетям относят также сети, в которых положение пунктов определяется прямой, обратной, комбинированной засечками. Сущность прямой засечки ( рисунок 8 ) заключается в измерении горизонтальных углов ( и ) на пунктах, например, А и В с известными координатами ХА, УА; ХВ,УВ и вычислении координат ХР, УР определяемого пункта Р по формулам Юнга ХР = ( ХА сtg + ХB сtg + УВ – УА ) / ( сtg + сtg ), УР = ( УА сtg + УB сtg + ХВ – ХА ) / ( сtg + сtg ). Р С / / А B Рисунок 8 - Определение координат пункта прямой засечкой Для контроля определяют координаты пункта из второго треугольника и вычисляют средние значения координат. Сущность обратной засечки ( рисунок 9 ) заключается в измерении горизонтальных углов , , на определяемом пункте Р. Затем по координатам исходных пунктов А, В, С и измеренным углам вычисляют дирекционные углы АР стороны АР, ВР стороны ВР, а затем координаты ХР, УР определяемого пункта по нижеприводимым формулам D A Р C B Рисунок 9 - Сущность обратной засечки [(ХВ -ХА) ctg +(ХA- ХС) ctg +УВ -УС] сtg АР = , [(УВ -УА) ctg +(УА- УС) ctg +ХС -ХВ] ВР = АР + , УР = [УВ + ( УВ -УА) ctg АР + ХА - ХВ] / (сtg ВР - сtg AР), XP = XA + (УP - УА) ctg AР. Для контроля измеряют третий угол между пунктами А и D и определяют координаты пункта Р с учётом координат пункта D. Определение координат определяемого пункта Р комбинированной засечкой заключается в измерении угла на одном из исходных пунктов, например, угла 1 на пункте А, и угла 1 на определяемом пункте Р ( рис.10 ). Для контроля измеряют аналогичные углы на пунктах С и Р. Р 2 1 1 1 1 С 2 А В Рисунок 10 - Определение координат пункта комбинированной засечкой Прямоугольные координаты определяемого пункта вычисляют по формулам Юнга с контролем из двух треугольников б) Создание съёмочного обоснования проложением теодолитных ходов Ходы съёмочного обоснования, развиваемые методом полигонометрии, называют теодолитными ходами. Теодолитные ходы опираются на пункты ГГС или пункты сетей сгущения ( местного значения ). По своей форме они бывают замкнутыми, опирающимися на один пункт сети ( рисунок 11 ) или разомкнутыми ( рисунок 12 ), опирающимися минимум на два пункта сети. В 0 1 d0 0 d1 1 2 2 А 3 А d2 4 d4 d3 3 4 Рисунок 11 - Замкнутый теодолитный ход В D Н 3 К 1 А 1 d1 3 d2 2 d3 4 d4 C А d5 2 С 4 Рисунок 12 - Разомкнутый теодолитный ход При проложении замкнутых теодолитных ходов с целью контроля внутри него прокладывают, как правило, диагональный ход, опирающийся на пункты замкнутого хода, например, пункты 2, 4 ( рисунок 13 ). В 0 4 0 3 А 6 5 2 1 Рисунок 13 - Замкнутый и диагональный теодолитные ходы При создании съёмочного обоснования из проложения теодолитных ходов соблюдается следующая последовательность работ: - проектирование ходов по планам и картам; - рекогносцировка ходов с целью уточнения составленного проекта и окончательное установление местоположения пунктов хода; - измерение углов поворота полным приёмов теодолитом 30 " точности ( Т30, 2Т30П ); - измерение длин линий землемерной лентой в прямом и обратном направлениях или дважды в одном направлении. В измеренную линию вводят поправки за компарирование, температуру, если температура компарирования и температура при измерениях различаются более чем на 80, за приведение длины линии к горизонту, если наклон линии к горизонту превышает 1.50. Результаты измерений записывают в журнал теодолитного хода. По окончании полевых измерений производится камеральная обработка, конечной целью которой является определение уравненных значений прямоугольных координат пунктов. Камеральная обработка измерений, выполненных при проложении теодолитного хода, производят в следующем порядке: - проверяют вычисления углов и расстояний в полевых журналах и вычислений по введению поправок в длины линий; составляют схемы проложенных теодолитных ходов; - вычисляют суммы измеренных углов / i / i = 1 + 2 +3 ...+ n; - вычисление теоретической суммы измеренных углов Т Т = 1800(n-2), где n – число измеренных углов в ходе, если проложен замкнутый ход, и по формулам Т = к - н + 1800 n, Т = н - к + 1800 n, если измерены соответственно левые и правые по ходу углы в разомкнутых ходах; - вычисляют угловую невязку хода f f= Т - Т'i ; - вычисляют допустимую невязку хода f доп f доп < 3t n, где t – точность теодолита ( 30" ); - вычисляют поправки в измеренные углы i i = - f / n; - вычисляют уравненные ( исправленные ) горизонтальные углы i i = 'i + i; - контролируют правильность вычислений i = Т. - вычисляют дирекционные углы направлений i i = i-1 ± 1800 + i , i = i-1 ± 1800 - i , если измерены соответственно левые и правые по ходу углы, - вычисляют приближённые приращенийя координат Х'i, У'i Х'i = d cos i, У'i = d sin i; - вычисляют суммы приближённых значений приращений координат У'i Х'i = Х1 + Х2 + Х3 +...+ Хn, У'i = У1 + У2 + У3 +...+ Уn; Х'i , - вычисляют теоретические разности приращений координат ХТ = ХК - ХН, УТ = УК - УН; - вычисляют линейные невязки по абсциссе fx и по ординате fy fx = ХТ - Х'i, fу = УТ - У'i; Невязки по абсциссе и ординате свидетельствуют об отклонения конечной точки хода от действительного положения. В этом случае необходимо оценить точность хода. Для этого вычисляют линейную невязку хода Р Р2 = fХ2 + fУ2, а затем относительную невязку хода Р / Р = (fХ2 + fУ2)2 / Р, которая не должна превышать 1:2000 для замкнутого хода и 1:1000 – для диагонального ( разомкнутого ); - вычисляют поправки Хi, Уi в приближённые значения приращений координат Хi = - fХ di / P, Уi = - fУ di / P; вычисляют уравненные ( исправленные поправками ) приращения координат Хi, Уi - Хi = Х'i + Хi, Уi = У'i + Уi; - контролируют правильность вычисления уравненных приращений координат Х i = ХТ, Уi = УТ; - вычисляют уравненные значения прямоугольных координат пунктов съёмочной сети Хi = Хi-1 + Х i, Уi = Уi-1 + Уi. Вопросы для контроля 1. Понятие геодезического пункта и геодезической сети. 2. Классификация геодезических сетей. 3. Понятие о съёмочных сетях, методы построения их. 4. Сущность метода триангуляции. 5. Сущность метода полигонометрии. 6. Сущность метода трилатерации 7. Сущность прямой и обратной засечек. 8. Сущность прямой геодезической задачи. 9. Сущность проложения теодолитного хода. Полевые измерения. 10. Понятие уравнивания углов и приращений координат точек.