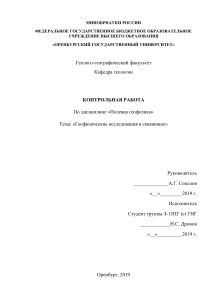
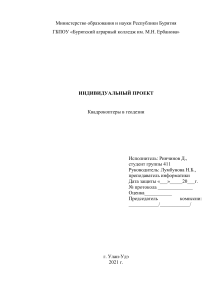
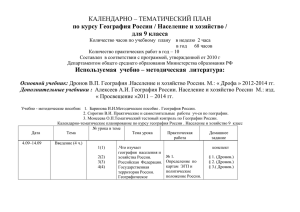
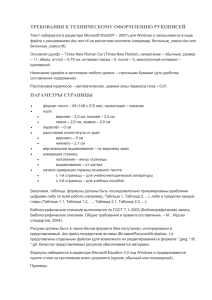
Муниципальное общеобразовательное автономное учреждение «Гимназия №7 (полного дня)» Проект по технологии Тема: «Гонки дронов » Выполнила: Солнышкова Ксения Николаевна 8»В» класс Руководитель Желудкова Лариса Владимировна Учитель технологии МОАУ «Гимназия №7» (полного дня) Оренбург 2023г. Содержание Введение..................................................................................................стр.3 1. Раздел (теоретический) 1.2. История появления дронов.................................................................стр. 1.3. Виды дронов.........................................................................................стр. 1.4. Наиболее эффективные модели дронов................................................стр. 2. Раздел (практический) 2.1. Выбор материалов, инструментов, приспособлений...........................стр. 2.2. Технологическая карта последовательности работы...........................стр. 2.3. Правила безопасной работы...................................................................стр. 2.4. Экономический расчет............................................................................стр. 2.5. Самооценка работы.................................................................................стр. 3.Заключение......................................................................................................стр. Список источников.........................................................................................стр. Приложение.....................................................................................................стр.15 2 Введение В нашем мире множество новых технологий, все они очень интересные и продвинутые. Но именно меня заинтересовали дроны. И я решила для себя узнать правда ли это, что управление дроном — это увлекательно и возможно для каждого. Работа и функции роботов довольно серьезная и непростая работа в рамках изучения предмета «технология» в школе. Для выполнения подобной работы необходимы знания не только технологических дисциплин, но и общие знания истории робототехники и ее истоков. Цель: Изготовить буклет «Виды дронов. Их описание и применение.» Задачи: 1. Изучить историю появления дронов; 2. Понять принцип работы дронов; 3. Ознакомиться с эффективными моделями; 4. Разобрать виды дронов. 3 1. Раздел (теоретический) 1.1. История появления дронов. Дроны — беспилотные летательные аппараты, которыми либо удаленно управляет оператор, либо они двигаются по заранее заданному маршруту. Сейчас эти устройства находятся на пике популярности. Удивляться не приходится, ведь их можно использовать для развлечения, фото- и видеосъемки (в том числе и профессиональных), военной разведки и ведения наблюдения за промышленными системами. Дроны вовсе не новинка 21 века. Первые прототипы появились даже не в 20-м, а в 19-м веке, когда «цифра» еще не существовала. Начало всего. Если говорить о дроне как об устройстве, которое управляется удаленно, то первым идею представил Никола Тесла. Ученый не просто теоретизировал, а зарегистрировал патент, в котором говорилось о транспортном средстве, управляемом при помощи радиоволн. Тесла разработал концепцию боевых дронов, которые, как он считал, смогут усмирить воинственный дух наций и прекратить войны благодаря угрозе применения «безошибочной и неограниченной разрушительной силы». Демонстрацию первого в мире радиоуправляемого дрона он провел в 1898 году, в пруду Мэдисон-сквер-гарден. Большинство идей, предложенных Тесла, получили дальнейшее развитие и привели к появлению дронов в их современном обличии. Появление современных невоенных дронов Специалисты считают, что эпоха современных невоенных дронов началась в 2006 году. Именно в этом году Федеральная авиационная администрация США одобрила полеты небольших пользовательских беспилотников. Распространение получили все же не бытовые дроны для развлечения, а летательные аппараты для научных задач и промышленности. Так, правительственные организации отслеживали при помощи таких систем распространение пожаров, изучали ситуацию в эпицентре 4 катастроф (землетрясения, наводнения и т.п.). Коммерческие компании изучали состояние нефтепроводов, посевов и морских угодий (наблюдение за перемещениями косяков рыбы). Использовались (и используются) дроны на стройке, в геодезии и других сферах. С течением времени все большую популярность стали получать пользовательские дроны, которые служат развлечением для любителей полетов. После того, как в дронах появились камеры, передающие видеопоток прямо в телефон, видео-очки или ноутбук, популярность персональных БПЛА взлетела до небес. На Хабре опубликована масса материалов о персональных дронах — самых разных моделях. Будущее дронов не ограничено лишь персональными моделями. После того, как стали популярны мультикоптеры, их возможности активно изучаются бизнесом: • использование на промышленных объектах (безопасность, проверка состояния различных агрегатов и трубопроводов), • использование в сельском хозяйстве, • доставка грузов, • доставка людей. Коптеры применяют и в медицине, например, для быстрой доставки необходимых медикаментов. Технологии постепенно развиваются, а емкости батарей растут, поэтому нет сомнений, что дроны станут умнее, маневреннее и функциональнее. Они станут неотъемлемой частью многих сфер нашей жизни: работы и учебы, включая транспорт, исследования, доставку грузов и все прочее, о чем я говорила выше. 1.2. Виды дронов. «Дрон» - это беспилотный летательный аппарат – БПЛА - летательный аппарат без пилота-человека на борту. 5 По разнообразию конструкции существует 4 основных типа беспилотных летательных аппаратов: • Мультироторные – мультикоптерные дроны; • Беспилотник с неподвижным крылом; • Однороторный дрон – беспилотный вертолет; • Гибридные дроны. Мультироторные — мультикоптерные дроны Мультироторные дроны - наиболее распространенные типы дронов, которые используются как профессионалами, так и любителями. Такой дрон представляет собой летающую платформу с 3, 4, 6, 8, 12 бесколлекторными двигателями с пропеллерами. Так дрон с четырьмя моторами носит название – Квадракоптер, с шестью – Гексакоптер, с восемью – Октокоптер. В полете дрон держит горизонтальное положение относительно поверхности земли и может зависать над определенным местом, перемещаться влево, вправо, вперед, назад, вверх и вниз, а так же, поворачиваться вокруг своей оси. Все действия совершаются путем изменения тяги на каждом моторе. Преимущества: вертикальный взлет, возможность зависать над объектом. Хотя мультикоптерные дроны просты в изготовлении и относительно дешевы, они имеют много недостатков. Основные из них - это ограниченное время полета, ограниченная грузоподъёмность и небольшая скорость. Они не подходят для крупномасштабных проектов, таких как аэрофотосъемка больших площадей. Основная проблема мультикоптеров заключается в том, что им приходится тратить огромную часть своей энергии на борьбу с гравитацией и стабилизацию аппарата в воздухе. В настоящее время большинство многороторных беспилотных летательных аппаратов способны летать всего 20 - 30 минут с минимальной полезной нагрузкой, такой как видеокамера. 6 Беспилотник с подвижным крылом Беспилотные летательные аппараты с неподвижным крылом полностью отличаются по конструкции от аппаратов с несколькими роторами. Для полета, и создания подъемной силы они используют "крыло", как его используют обычные самолеты. Эти беспилотники не могут зависать на месте в воздухе, борясь с гравитацией. Вместо этого они могут двигаться вперед по заданному курсу идо тех пор, пока позволяет их источник энергии. Большинство беспилотных летательных аппаратов с неподвижным крылом имеют среднее время полета в пару часов. Дроны с газовым двигателем могут летать до 16 часов и выше. Благодаря более высокому времени полета и топливной экономичности беспилотные летательные аппараты с неподвижным крылом идеально подходят для дальних операций (будь то картографирование или наблюдение). Но они не могут быть использованы для аэрофотосъемки, где беспилотник должен оставаться неподвижным в воздухе в течение определенного периода времени. Другими недостатками беспилотных летательных аппаратов с неподвижным крылом являются более высокие затраты на обучение персонала навыкам управления, необходимым для полета. Не так-то просто поднять в воздух беспилотник с неподвижным крылом. Чтобы запустить и поднять беспилотник с неподвижным крылом в воздух, требуется либо специальная "взлетная полоса", либо пусковая установка в виде катапульты. Чтобы благополучно посадить аппарат обратно на землю, также потребуется взлетно-посадочная полоса, парашют или сеть. Однороторный дрон — беспилотный вертолет Однороторные дроны очень похожи по конструкции и на настоящие вертолеты. В отличие от многороторного дрона, у одноготорного дрона есть один большой ведущий винт плюс небольшой по размеру винт на хвосте, чтобы контролировать курс. Однороторные дроны гораздо эффективнее, чем многороторные версии. Они имеют более высокое время 7 полета и могут даже приводиться в действие двигателями внутреннего сгорания. В аэродинамике, чем меньше число винтов, тем меньше общее вращение объекта. И это главная причина, почему квадрокоптеры (4 винта) более стабильны, чем октоптеры (8 винтов). В этом смысле однороторные дроны гораздо эффективнее многороторных дронов. Но есть и недостатки у однороторных дронов. Эти машины из-за более сложной конструкции имеют высокую стоимость и эксплуатационные затраты. Также они требуют специальной подготовки персонала для управления. Большие размеры лопастей несущего винта представляют опасность. Были зафиксированы несчастные случаи нанесения смертельных травм винтом радиоуправляемого вертолета. К примеру, многороторные дроны, ещё никогда не участвовали в смертельных авариях, хотя шрам на теле человека от винта многороторного дрона получить вполне вероятно. Гибридные дроны Гибридные версии сочетают в себе преимущества моделей с неподвижным крылом, такие как - более высокое время полета, с преимуществами моделей на основе винтов – возможность пареня. Гибридные конструкции летательных аппаратов проектировались с 1960-х годов, но не имели особого успеха. Однако с появлением датчиков нового поколения (гироскопов и акселерометров) получила новую жизнь и направление развития. 1.3. Наиболее эффективные модели дронов. Лучшие дроны: 1. DJI Mavic 3 2. Квадрокоптер DJI Mini 3 Pro 3. DJI Mavic 2 Pro 4. Autel Robotics EVO Lite+ 5. DJI Air 2S 6. DJI Mini 2 8 гибридность конструкции 7. DJI FPV 8. DJI Mavic Mini 9. Квадрокоптер Syma X5UW-D 10. Квадрокоптер Hubsan X4 FPV PLUS H107D+ 9 2. Раздел (практический) 2.1. Выбор материалов, инструментов, приспособлений. Для работы над буклетом я использовала: • Бумагу формата А4 • Бумага для акварели • Цветные карандаши • Ластик • Линейка • Маркеры 2.2. Технологическая карта последовательности работы над буклетом. 1. Первым делом я прикрепила иллюстрацию, описывающую мою работу; 2. Далее постаралась изобразить в картинках всю ту информацию, которую описывала; 3. Затем сложила буклет по правилам 4. И дорисовала маленькие детали 2.3. Правила безопасной работы. 1. Приготовить необходимые материалы и инструменты 2. При слабом зрении надеть очки 3. Поддерживать чистоту и порядок на рабочем месте. 4. Не делать резких движений во время работы. 5. Сразу подготовить рабочее место 6. Сидеть при выполнении задания нужно ровно и прямо, а не сгорбившись 7. Аккуратно работать красками, кистями, карандашами. Не размахивать ими перед своим лицом. 8. После окончания работы кисти должны быть вымыты и вытерты, а весь другой рабочий материал убран. 10 На протяжении всего занятия необходимо следить за чистотой 9. рук и рабочего стола. 2.4. Экономический расчет работы. № п/п Название Цена (руб.) Расход материалов Затрата (руб.) 11 Бумага акварельная 30 1 30 22 Бумага формата А4 5 1 5 33 Графитный карандаш ТМ 12 1 12 44 Ластик 24 1 24 55 Набор карандашей 199 1 199 66 Линейка 20 1 20 77 Художественные маркеры 25 5 125 цветных Итог: 8 415 рублей 2.5. Самооценка работы. Я считаю, что буклет получился отличным! Мои данные представлены подробно, полно и тщательно. Организованы так, что я могу легко и быстро находить нужную информацию. А записи в буклете аккуратны, красивы и их легко читать. Я старалась производить контроль и перепроверять каждый этап работы. Всю работу я выполняла самостоятельно. 11 Заключение После завершения работы я могу сказать, что данная работа дает возможность выразить себя, проявить творческую фантазию в определенном направлении. Работая с литературным материалом и интернет ресурсом, я получила много новых теоретических знаний. В процессе выполнения работы старалась выполнить изделие аккуратно и качественно. Я усовершенствовала свои знания в сфере современных изобретений. Во время изготовления буклета возникали некоторые сложности, но я сумела их устранить и сделать, как хотела! Буклет я делала впервые. И думаю, что я выполнила все поставленные цели и задачи моего проекта. Кроме того затраты на проект оказались небольшими и это очень радует. 12 Список источников и литературы. • Академик С.П. Королев. М.: Наука, 1986. • Афонин П.М., Голубев И.С., Колотков Н.И. и др. Беспилотные летательные аппараты. М.: Машиностроение, 1967. • Гусев А.Н. Подводные лодки с крылатыми ракетами. СПб.: Галея Принт, 2000. • Даффи П., Кандалов А. А. Н. Туполев. Человек и его самолеты. М.: Московский рабочий, 1999. • Латухин А.Н. Боевые управляемые ракеты. М.: Воениздат, 1968. • Макаров Ю.В. Летательные аппараты МАИ. М.: Изд-во МАИ, • Родионов Б.И., Новичков Н.Н. Крылатые ракеты в морском бою. 1994. М.: Воениздат, 1987. • Широкорад А.Б. История авиационного вооружения. Минск: ХАРВЕСТ, 1999. 13 Приложение 1 Мультироторные дроны Квадрокоптер DJI «Mavic Pro Platinum». Гексакоптер «Yuneec Typhoon H Professional» 14 Приложение 2 Беспилотники с неподвижным крылом Беспилотник с неподвижным крылом. Беспилотник с неподвижным крылом компании FeiyuTech Приложение 3 15 Однороторный дрон Пример гибрида. Квадрокоптер «Vtol» с неподвижным крылом 16