Pyezoelektricheskie vibroizmeritelnye preobrazovateli axelerometry by Yanchich V V z-lib org
advertisement

МlПIИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное
учреждение высшего профессионального образования
«lОжный федеральный университe'l»
НКТБ «Пьезоnpи60Р»
Факультет высоких технологий
В.В.Янчич
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
ВИБРОИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
(АКСЕЛЕРОМЕТРЫ)
Ростов-па-Дону
Издательство Южного федерального университета
2010
VДК681.586
ББК БЗ97
Печатаemйl по решен.uю proа"lJlIон>ю-uздателы;кого совета
Ю:ж:ного федеJШЛЬ"О2О yнusepcитemn
Рецеизен"Гы:
дoкrop технических наук, профессор ПаnКD..4.
.40;
дmcrop технических мук, профессор Богуш М. В.;
кандидат технических наук, доцеит Цы6рuй Н. К;
кандидат технических наук, доцент З,,-VЛЯlШfI В. Л.
Ответственный редПL.'ТОр:
доюnор т=mчеCk"IIX наук, nроф",хор ПIl1", .. А. Е.
J\10"ографuя rwдгamо"лена u издана " pauxar 1ШIJIЮНШlhНО2О nроeюnа
«06pawвa"иe» по «Прогр{ныre ртl<U111"" федералышго госудорсm«еюшго
оБJЮ3Dllamель"О2О учре:жден"" высшего npoфeccuО"lIJIЬ"Ого образова"""
"Ю:ЖJlЫЙ федеJШЛЬ"ЫЙ уни"ерситет" но
2007-2010 гг.»
Яи'шчВ.В.
Я
66
IIьe.зоэлекrpические виброизмериreлън:ые преобразоватеШl (акселерометры): монография
I
В. В. ЯНЧИ'I.
-
Ростов нJД: Изд-во ЮФУ,
(ПьезозлекrpИ'lеское приборостроение. Т.
2010. - 304
с.
-
7).
ISBN 978-5-9275-0728-3
lIМmоrpафия ПОCJl1!щена вопроr.aм проеь..ирования. Пьe.Jоэлектрических вибрОill­
мерительных преобраэователei:i (акселерометров), широко используемых ДJ1Я измере­
ния параметров IШбрациониых и yдapHhlX ускорений в JXfllШЧНhlX облэ.стJIX техники.
Приведены сведеШlJl о nьеэоэлектрических мarepиилах и nьезоэлементах, физико-тех.­
нических {)сновах работы акселерометров, их ю:mстру1CIИВНЫХ схемах и технических
XIIршcrepиcrnкax. Рассмотрены механизмы _~ внешних фш:торов, воэдei:icrnу­
ЮЩИJ< м акселерометры в реапьнhlX УС.IювИJIX эксплуатации. Описаны Методики изме­
рения {)сн{)вных характеристик акселерометров и ераlllШreльной {Щенки их техниче­
скогоуровия.
Предназначена ДJ1Я nнженер{)в, мШ"истров, аcnиранroв и cnециалиcroв, ра&.тaIOЩИХ
по созданию и эксплуатации датч.ико-преобразующei:i arшарarypы ДJlJI виброметриn,
а также в ()масти nье:юэлектрическото приборостJЮенив. Можer быть иcnользов.ана
в качестве учебного посООШI для студентов старших курсов технических специальн{)с­
тей, обуЧII.ЮЩИJ<CJl П{) нanpiUШениям J<Пъезоэлеь.тричесь:ое приборостроение» и <IИн­
формационно-измерителъная тexншrn и технологию,.
ISВN978-5-9275-0728-З
УДК
681.586
ББКВЗ97
ОГЛАВЛЕНИЕ
ОТ
.................................................................. ]0
iHtTopa ..
I1Н<:ДСIII1<:
ГЛАnЛ.
I-t
. ........................................................ ]2
1_
ПЫ;:ЗО:JJIF.КТРIfЧЕС:КИЕl\1АТЕРИА.JIЫ
·J.т)Rl\rF.IIТI~1
....................................................................... ]5
Kr;JTKI1<: СНС}\СНИЯ О пьсзоэлектричесюIX матеРИaJffi1( •.•.•. ]
5
1.1.
1.2
У'пройстно и работа uьеЗОЭЛементов ................................ 24
1.3.
КОIIСТРУЮ(I1И 11 СJJособы НЗГQТOвлеюIЯ
МIЮlm:.lЮЙllhlХ IIЫ:'Ю')JJементов •.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.
ГЛАn,\
2.
35
ПРШIJ~НП РАБОТЫ
П ....ПО')лЕI(ТРl-tчЕсКQгО АКСЕЛЕРОМЕТРА
.................... 42
42
2.1
О(.;II()IШhIС И3М(:РJlеМhТе параметры виброь,"Оле6аюIЙ ........
2.2.
ФИ:JИ'IС(.;КИС uсион.ы работы
IlhС'Ю")JIСКlрИ'IССКИХ акселерометров .•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.•.
44
ГJJЛnА З_ ()СIТОШJЫF. ХАРАКТЕРИСТИКИ
П ....\]О')}1Е1(Трl-tчЕсl\их АКСRЛЕРОМ:ЕТРОВ
3.1
3.2
.................... 55
k"mффIЩИСIГГЫ нр<.:о6разования:
56
ОIIIООIТ<:JlЫIЫЙ !(о")ффициент поперечного
3.3
Р,J60'IИЙ /(И:1ml."ЮН частот
3.4
Ра60'IИЙ /!И:111а.'Юl{ т;,:мпсратур
3.5
С1,\n·\
4. BIIEIIIIIJlF.
ФЛI(ТQРЫ, R1ИЯЮЩИЕ НАРАБQТУ
ПI.. F.30·).lЕI(ТРl-tчl~сl\QгО Аl(СЕЛЕРQl\IEТРА
j':lIассифик;щи}{ НТ!С1IIIIИХ в:rnяющих факторов
4.1
4.2
R'IШlllll<: \1~ХШIИ'lеt:КИХ фаь.lOроВ
42.1
81
81
84
КШЮIИС ,!tформа1J;ИЙ контро:шруе)о,ЮГО
OGhCICTU
84
2.2.
4 2.3.
42.4
КIИ~!lИС ;IilНJ1СНШГ и акустического по:IЯ
89
4.3.2.
ВjlИ>I!lИС 'IOKOR В контурах зазеМJJения ................. 10]
4
КIИ~!lИС НСИ':J\fерне!-.JЫХ вибраций
.......................... 91
К'IИ>l!JИС ИНl'Снсивных вибраций и y;rapOB ............. 93
4.3 R.lIШIIНН'; :J:!~I(грJ.!'!~съ:их имагнитных полей .................... 97
4.3.1
К'IИ>lIJИС ПСР~МСlfНОГО магнитного ПОЛЯ ................ 97
4.4.
ВJПIЯНИе те],шературы
.......................................................
.......................
.....................
4.5. Влияние rnдpoxиr.mческих свойств окружающей среды ..
4.6. ВJПIЯНИепрони:кающейрадиации ....................................
4.4.1.
4.4.2.
ГЛАВА
Влияние постоянной температуры
Влияние температурных колебаний
5. КОНСТРУКТИВНЫЕ
105
105
110
113
114
СХЕМЫ
И ОСОБЕННОСТИ ВЫПОЛНЕНИЯ
ПЬЕЗОЭЛЕКТРИЧЕСКИХ АКСЕЛЕРОМЕТРОВ
5.1.
5.2.
.................. 117
... 117
Классификация пьезоэлекгр.ичес:ких акселерометров
Конструктивные схемы элекгромеханических
преобразователей пьезоэлекrpичесЮIX акселерометров
5.3.
... 127
Конструктивные и эксплуатационные особенности
трехкомпонентных пъезоэле:r...трических акселерометров.
ГЛАВА
6.
СПОСОБЫ КРЕПЛЕНИЯ АКСЕЛЕРОJ\;ШТРОВ
ГЛАВА
7. КОНСТРУКЦИИ АКСЕЛЕРОJ\;ШТРОВ
139
... 149
С СОСТАВНЫМИ ЭЛЕКТРОМЕХАНИЧЕСКИМИ
ПРЕОБРАЗОВАТЕЛЯМИ
7.1.
.............................................................. 160
Акселерометры с рабочей деформацией
растяжения--(;жатия
7.2.
7.3.
7.4.
........................................................... 160
............ 170
............ 179
Акселерометры с рабочей деформацией изгиба
Акселерометры с рабочей деформацией сдвига
Акселерометры со встроенными
дополнительными устройствами
ГЛАВА
..................................... 183
8. АКСЕЛЕРОJ\ШТРЫ С МОНОКЕРАМИЧЕСКИМИ
И МОНОЛИТНЫМИ ПЬЕЗОЭЛЕКТРИЧЕСКИМИ
ЭЛЕКТРОJ\;ШХАНИЧЕСКИМИИРЕОБРАЗОВАТЕЛЯМИ
... 191
8.1.
Пьезоэлекгр.ичес:кие монокерамические
8.2.
преобразователи ................................................................
Пьезоэлекгр.ичес:кие монoшrrные преобразователи ......
8.2.1.
Особенности построения пъезоэлектрических
монoшrrных преобразователей .............................
8.2.2.
Конструкции монолитных
8.2.3.
блоков-преобразователей ......................................
Особенности технологии изготовления
монoшrrных блоков-преобразователей
191
197
197
201
................ 213
8.3.
Акселерометры на основе моношrПIЫХ
и монокер!l],шческих блоков-преобразователей
Конструктивные особенности блочных
............. 219
8.3.1.
акселерометров
.......................................................
8.3.2. Бескорпусные блочные акселерометры ,..............
8.3.3. Полукорпусные блочные акселерометры ............
8.3.4. Корпусные акселерометры ....................................
ГЛАВА
219
220
223
225
9. ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК
..................................................................... 234
ИзмереЮlе :коэффициента преобразования ..................... 234
9.1.1. Вибростенды для измерения
:коэффициента преобразования ............................. 236
9.1.2. Измерение :коэффициенrа преобразования
АКСЕЛЕРОМЕТРОВ
9.1.
а6сOJПOТНЫМ методом с применением
9.1.3.
лазерного интерферометра ....................................
Измерение :коэффициенrа преобразования
методом непосредственного сличения
9.2.
ИзмереЮIе относительного :коэффициента
поперечного преобразования
9.3.
9.4.
241
................. 243
........................................... 246
....................................... 249
............................ 251
ИзмереЮIе резонансных частот
ОпределеЮIе :коэффициентов влияния
9.4.1.
Определение коэффициента влияния
те:мпературы
9.4.2.
9.4.3.
............................................................ 251
Определение коэффициенrа влияния
деформации основания ..........................................
Определение коэффициенrа влияния
:магнитного поля
9.4.4.
Определение коэффициента влияния
акустического поля .................................................
9.4.5.
253
..................................................... 255
255
Определение коэффициента влияния
перепада температур
.............................................. 256
9.5. Испытания на ударную и вибрационную прочность ..... 257
ГЛАВА
10. ОЦЕНКА КАЧЕСТВА И ИИФОРМАТИВНОСТИ
.................. 260
ПЬЕЗОЭЛЕКТРИЧЕСКИХ АКСЕЛЕРОМЕТРОВ
ЗaкJIIOчеЮIе
Литература
........................................................................................ 278
......................................................................................... 280
СОКРАЩЕНИЯ
АСНИ
-
АСУТП
автоматическая система научных измереи:ий
-
автоматическая система управления технологически­
ми процессам:и
АЧХ
АХ
-
-
амплитудно-часТQТНая характеристика
амплитудная характеристика
КВАП - КОЭффlЩиент влияния акустического поля
- :коэффициент ВJШЯIПIЯ деформации ОСНQваIШЯ
КЕда
КВ:NПI
-
коэффициент влияния магнитноаго ПОЛЯ
КВПТ - коэффициент ВШlЯIПIЯ перепада температур
КВТ
- коэффициент вmIЯНИЯ Te~тepaтypы
КЛТР
:м:БП
-
-
коэффициент ЛШlейного теплового расширения
монолитный 6лок-преобразователь
О:КПП - относительный КОЭффlЩиент поперечного преобразова­
пия
ОП:К - обобщенный ПQказатель качества
п:км
п:м:
-
-
пьезокерам:ичес:кий материал
пьезоэле:rcrpический материал
СЗУ - согласующий усилитель заряда
СУ - согласующий УСIШИТель
СУН - согласующий УСIШитель напряжения
ФЧХ
-
фазочастотная характеристика
ОБОЗНАЧЕНИЯ
Общие R~:JJ1ЧИIIЫ
- мапштная ин;:ryкц:ия
в
С
э:rектрическая е\ПФСТЬ
-
Е
Ею
напряженность Э:IеIП]JичеСliQГО ПО:[~Т
-
:\щ::rу:lЬ упрyroсПI
F-СIШД
Н
-
1-
напряженность :\ШГНИТНОГО ПО_'IЯ
Э.lе"-11лrческшV, ТОК
р
Q-
звуковое давлеlше
R-
электрическое сопротив.пеlше
т
электрический заряд
- температура
И - электрическое напряжеffilе
W - эле:rcrpическая энергия
JI~Bblcoтa
l-дшша
S-nЛQщадь
(-время
с*
VD
-
деформация
коэффициент Пуассона
р
-
ПЛОТНОСТЬ
о"
-
механическое напряжение
Парамечи,. IСЩlсбаlШЙ
а
-
О.
-
ускорение
ампшпуда УСI<Oрения
f~частота
и -резкость
vх
-
виброс:корость
амшштуда смещения
1: "- период
колебаний
t;J - начальная фаза КQ.1еО:llШЙ
циклическая (k"РУГОВая) чш,;тота
((J -
Пара'lетры пьеЗШlaтерпа.l0В
РО
вектор остаточной ПО:IЯРИЗLJванности
-
параметр прие:мз
Q., -
Illvf
T'~ - Тбшература фазового перехода (точки Кюри)
c~K _ скорость звука в ffi1
d., - пьезшюдy.JЬ
g~ - пьезокоэффициент
с
-
со
-
относительная диэлектрическая проницаемость
диэлектрическая ПРОНlщаемость вакуума
E~ - диэлектрическая ПРОIПщаемость ПКМ в свободном сосТQЯ­
IПIИ на низкой частоте
Пара метры преобразователей и датчиков
С
-
емкость входа измерительного устройства
С:"- емкость IG:1.беля
СО - емкость акселерометра со штатным кабелем
С
- емкость пьезоэлемента
СП _ емкость преобразователя
сПfJ _ емкость в цепи обратной связи СЗУ
Е СВ_ модуль упругости п:м
Gn _ k--РИтерий качества
К -КВАП
кВ _ коэффициент преобразоваIПIЯ по заряду
К - коэффициент преобразоваfШЯ по напряжеfШЮ
K:lH)-КВМП
к
-окпп
k""-квДо
R." - разрешающая способность акселерометра
R" - сопротивлеЮfе входа измерительного устройства
fJ'~ объем возможностей
ап -
предел измереIШЯ УСIФрения
а max е~
-
максимальное измеряемое значение
спектральная плотность входного напряжения шумов опера­
ционного усилителя
f. - верхняя частота рабочего диапазона
l. - нижняя частота рабочего диапазона
i - частота резонансных :колебаний закрепленного акселерометра
k-
:коэффициент упругости
:контактная жесткость соединения инерционного элемента
kun -
с пьезоэлементом
k: k -
:контактная жесткость :клеевого соединеlПlЯ
:контактная жесткость соединения основаlПlЯ с объектом
:коэффициент упругости пьезоэлемента
k -
k: - :коэффициент передачи усилителя
kyn -
:контактная жесткость упруго поджатого соединения
показатель точности
k -
{ - эквивалентная жесткость пьезоэлемента
k:n_ показатель дmшмического диапазона
kj - показатель диапазона допусти::мых: влияющих факторов
k - показатель удельной чувствительности
( - коэффициент шумового усилеlПlЯ
n - количество слоев пьезоэлемента
m. -
масса акселерометра
ти -
масса инерционного элемента
mп -
масса пьезоэлемента
m,фф - эффе:rcrивная масса
j3 11 -
КОЭффlЩиент затухания
порог чувствительности акселерометра
000 - циклическая частота свободных колебаний закрепленного
акселерометра
ООр - циклическая частота резонансных колебаний закрепленного
акселерометра
От автора
Работы по созданmo пьезоэле:rcrpических виброизмерительных
преобразователей, или акселерометров, для измерения параметров
вибрационного и ударного ускореIШЙ, как и иных пьезоэле:rcrpи­
ческих датчиков, начали активно развиваться с 60-х г, прошлого
века, Это объясняется возросшей потребностью, вызванной та­
J(]ThПf техническими направлеНИЯ1vШ, :как реактивная авиация, ра­
кетно-космичес:кая техника, энергетика, мапшностроение, а также
появлением пьезокерамических материалов
с
харmcrериCТИКflШl,
приемлеМЬDШ для прmcrического использования в датчиках,
К сожалению, публикации, касающиеся вопросов КQнструи­
роваlПlЯ И применения пьезоэлектрических акселерометров, или
содержат сведения общего характера, или посвящены узкоспеци­
ализированным проблемам и размещены в разрозненных науч­
но-технических изданиях. В связи с этим предпринята попытка
обобщить в одной книге результаты разработок и исследований
по данному направленmo, проведенных в течение многолетнего
периода в нашей стране и за рубежом. Приведены также наиболее
Шlтересные результаты, полученные в научном констру:кторско­
технологическом бюро ((Пьезоприбор»
Южного федерального
УЮlВерситета, часть из которых публикуется впервые,
К настоящему времени, когда уже создано большое количе­
ство констру:ктивных вариантов акселерометров, акценты смес­
ТIШИСЬ в сторону развития специальных электронных аналоговых
и цифровых устройств, встраиваемых непосредственно в датчи­
ки, Однако, несмотря на успехи ми:кроэле:rcrpони:ки, именно мет­
рологические и теХIШческие характеристики пьезоэлектрических
преобразователей имеют первостепенное значение, что и пред­
ставлено в настоящей монографии.
Пользуясь предоставлешюй возможностью, автор выражает
глубокую признательность и благодарность всем, кому он обя­
зан приобретенными знаIШЯМИ и поддержкой в работе: Крама­
рову Олегу Павловичу, Паничу Анатолию Евгеньевичу, Горmпy
Анатoлmo Васильевичу, МО:КРОВУ Евгению Алексеевичу, Иорmпy
Юрию Иосифовичу, Малкову Якову ВеЮIaМИНОВИЧУ, Дунаевско-
10
му Вmcroру Павловичу, ЦexaHCКO~!)' Константину Ромуальдовичу,
Костюкову Владимиру Николаевичу, а также коллегам по COBMeCT~
ной работе: Богушу Михаилу Валерьевичу, Вусевкеру Юрию Aнa~
тольевичу, Доле Владимиру Константиновичу, Донскову Виктору
Ивановичу, Иванову Александру Анатольевичу, Ковалеву Сергею
Николаевичу, Козлову Валерmo Васильевичу, Кустову Вадиму
Николаевичу, Санину ЕвгеlПlЮ Ивановичу, ФИЛИIПIOву ЕвгеЮlЮ
Викторовичу, Чеботаренко Олегу Борисовичу и :многим другим,
Автор искреlПlе благодарит рецензентов настоящей MOHoгpa~
фии за цеlПlые рекомендации и замечания, сделанные в процессе
подготовки рукописи,
ВВЕДЕНИЕ
ИсследовзЮ1Ю колебательных процессов уделяется большое
внимание при разработке, ИСnЫТRIШИ и эксплуатации разнооб­
разных теХЮlческих и технологических устройств, в том числе
в энергетике, машиностроении, металлургии, авиационной и ра­
кетно-космической технике, транспорте, судостроении, геологии,
нефтегазодобывающей и перерабатывающей ПРОМЫIIШенности.
С помощью виброметрии успешно решаются вопросы, свя­
занные как с общим развитием техюп(И, так и с ПQвьппением ее
надежности и безопасности эксплуатации, В послеДlПlе годы все
более широкое распространение получают измерительно-инфор­
маЦИOlПlые системы виброконтроля, МQНИТОРlПlга. диагностики
и автоматического управления сложными теХlПlчес:кими система­
ми и технологическими процессами, не ТОЛЬКО дающие большой
теХШlко-экономический эффект, НО и способствующие предотвра­
щенШQ аварий и возможных экологических катастроф.
Начальным звеном таких систем являются датчики параметров
вибрационных и ударных колебаний, расположенные непосреk
ственно на КОНТРOJПlруемом объекте и осуществляющие преоб­
разование измеряемой механической величины в электрический
сигнал, поступающий на регистрирующие и обрабатывающие
устройства. Датчики часто работают в сложных и неблагоприят­
ных условиях
-
при высоких теhШературах, сильных переменных
магнитных полях, интенсивных вибрациOIПIЫХ и ударных пере­
грузках, высоких давлеЮIЯX и проmшaющих: излучениях. В этой
связи к датчикам предъявляются особые требования, прежде всего
к их надежности и стабильности метрологических характеристик.
из всех известных тшюв датчиков, благодаря своим преиму­
ществам, пrnрокое при:менеЮlе в рассматриваемой области нахо­
дят пьезоэле:rcrpические виброизмерительные преобразователи,
или акселерометры, которые относятся к датчикам генераторного
ТШIа и непосредственно npеобразуют вибрационное или ударное
ускорение в пропорциональный электрический сигнал,
Метрологические и ЭКСШIуатационные характеристики ак­
селерометров, главным образом, зависят от свойств использу-
12
Введexuе
емого пьезоматериала и конструктивных особенностей элект~
ромеханического преобразователя, а также исполнения датчика
в целом.
ПЬезоэлектрические акселерометры, кроме электромеханиче~
ского преобразователя, могут содержать встроенные элеКТРOlПlые
устройства, например: предварительный усилитель, систему пре~
образования и первичной обработки сигнала и др. В настоящей
работе такие датчики, как и Шlые специализированные электрон~
ные устройства, предназначеlПlые для датчико~преобразующей
аппаратуры, практически не рассматриваются, так:как это вполне
может представлять самостоятельную тематику,
Монография состоит из десяти глав.
Первая глава содержит сведения о свойствах и особешlOСТЯХ
пьезоэлектрических материалов и пьезоэлементов, используемых
в датчИIФВОЙ аппаратуре,
ВО второй главе рассмотрены измеряемые параметры вибра~
ЦИОIПIЫХ колебаний и физические основы работы пьезоэлектри~
ческих акселерометров,
В третьей главе рассмотрены основные теХlШЧеские харак­
теристики акселерометров и их зависимость от свойств датчика
и регистрирующей аппаратуры.
Четвертая глава посвящена рассмотренШQ мехаЮlЗМОВ влия~
IПIЯ внешних факторов, воздействующих на акселерометры в pe~
альны:х условиях эксплуатации.
В пятой главе приведены классификация акселерометров по
конструктивным и эксплуатационным признакам и их КOHCТPYК~
тивные схемы.
Шестая глава полностью посвящена возможным способам
крепления акселерометров на :контролируемых объектах и оценке
их эффективности,
В седьмой главе рассмотрены примеры выполнеlПlЯ акселеро~
метров с электромеханическими преобразователями составной
конструкции.
13
Введение
в восьмой главе описаны монокерамические и МОНOJштные
:конструкции электромеХaJПIческих преобразователей и акселеро­
метров на их основе.
Девятая глава посвящена измеренШQ характеристик акселеро­
метров.
В десятой главе рассмотрены критерии оценки и сравнения ак­
селерометров
ГЛАВА
1
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ МАТЕРИАЛЫ И ЭЛЕМЕНТЫ
1.1. Краткие
сведения о пьезоэлеll."Трических материалах
Тематике, касающейся природы и свойств пьезоэлектрических
материалов (ПМ), посвящены многочисленные публикации оте­
чественных и зарубежных авторов
[1-3],
издававшихея на про­
тяжеmш длительного периода, К числу последиих изданий отно­
сятся работы
[4, 5],
содержащие сведеIШЯ общего характера.
для ПQНИМЗIШЯ ОСНОВ построения рассматриваемых в насто­
ящей работе пьезоэлектрических акселерометров (виброизмери­
тельных преобразователей) целесообразно лишь кратко остано­
виться на ряде основных свойств и параметров ПМ.
К пм ОТНОСИТСЯ обпшрная группа кристаллических ],штериа­
лов с низкой степенью симметрии ионных решеток, Действие ме­
хаиических СИЛ на такие кристаллы вызывает их электрическую
поляризацию (прямой пьезоэффе:rcr) в результате смещения поло­
жительных и отрицательных ионов при деформации элементар­
ных ячеек, приводящей к измененШQ электрических моментов.
При изменении знака деформации на противоположный изменя­
ется и направление поляризации в кристалле.
Создание в кристалле электрического поля от внешнего ис­
ТОЧlПlкз
вызывает
смещение
ионов
разных
знаков
во
взаимно
противоположных направлеlПlЯX и его деформацию (обратный
пьезоэффект). Естественно, что изменеlПlе направления элект­
рического поля на противоположное, вызывает изменеlПlе знака
деформации кристалла,
Пьезоэффектом обладают некоторые естествеlПlые и искус­
ственные монокристаллы (сегнетова соль, кварц, турмалин, ни­
обат лития). В отличие от монокристаллов, пьезокерамические
материалы (ПЮvl), например на основе твердых растворов тита-
15
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
ната бария, цирконата-титаната свища, титаната-ниобата висму­
та, приобретают пьезоактивность только после предварительного
процесса их поляризации, происходящего под воздействием вре­
менно приложенного электрического поля. для появления оста­
точной поляризованности РО (рис,
ющего электрического поля Е
1.1)
напряженность поляризу­
должна превьппать коэрцитивное
поле ПКJv1, в результате чего большинство из хаотически ориен­
тированных доменов приобретет преи:мущественную ориента­
цию, сохраняющуюся после снятия внешнего поля
[6], Процесс
[7].
поляризации вызывает остаточную деформацию П:КМ
Рис.
1.1. Поляризация пьезоэлемента:
а - заготовка пьезоэлемента; б - процесс поляризации;
в
-
наполяризованный пьезоэлемент
для праь.."I'ического использования пьезоэффекта из пм изготав­
ливают пьезоэлементы с зад~ш геометрическими параметра­
ми и электродами, необходим:ьn.m для снятия (при прямом пьезо­
эффекте ) или подачи (при обратном пьезоэффекте) электрического
сигнала. В большинстве случаев электроды выполняют посред­
ством нанесеIПiЯ токопроводящего покрытия, ИJШ меташшзации,
В датчиковой аппаратуре наиболее широкое применение нахо­
дят пьезоэлементы из ПКJv1, обладающие по сравнеЮlЮ с моно­
:кристаллю.ш более высокой nьезоaIcrИВНОСТЬЮ, технологичнос­
тью и меньшей стоимостью. Однако электрофизические харак­
теристики некоторых монокристаллов, например :кварца, гораздо
стабильнее, чем ПКJv1.
16
1.1. Кратхце сведения Q
nьезоэлexтpuчecкwc мшnерUШ/lJХ
Для использования в акселерометрах наиболее важными па­
раметрами
ITh1
являются; nьезомоДУЛь, диэле:rcrpическая прони­
цаемость, модуль упругости, механическая прочность, рабочий
диапазон температур, Не меньшее значение имеют стабильность
названных характеристик во времени и к влияшпо таких внешних
воздействий, как температура, мехаЮlческие нагрузки и др,
Пьезомодуль является параметром конкретного ПМ, определя­
ющего значеffilе генерируемого электрического заряда на элект­
родах nьезоэлемента от действующей на него силы и, как след­
ствие, его напряженного состоЯIШЯ.
Не останавливаясь для описаЮIЯ пьезоэффекта на использова­
ffiШ тензорного аппарата, подробно изложенного в работах
[7, 8]
и многих других публикациях на эту тему, следует отметить, что
при деформации пьезоэлемента в виде параллелепипеда, напри­
мер,
из
пьезокерамики,
электрические заряды
могут
ВОЗlПlкать
между тре],,1Я парaш:I его противоположных граней. Следователь­
но, генерируемый заряд является вектором и определяется тремя
ко:мпонентaш:I, а напряженное состояние характеризуется тензо­
ром второго ранга с девятью компонентами,
из которых шесть
являются независи:м::ыJ\Ш, Таким образом, пьезомодуль
теризует плотность заряда на эле:rcrpодах при
dij
харак­
единичном меха­
ническом напряжеlПlИ. Пьезомодуль является тензором третьего
ранга, в общем случае ОlШсывается
18
независимыми компонен­
тами, В прямоyroльной системе координат направление вектора
остаточной поляризованности принято обозначать ШlДексом
(вдоль оси
Z).
Направления остальных осей
1 и 2 (Хи
твенно) может быть выбрано ПРОИЗВQЛЬно. Индекс
3
У соответс­
i = 1-3
обоз­
начает направление нормали к поверхностям эле:rcrpодов, индекс
j = 1--6 -
соответствующий компонент тензора механического на­
0"11 = 0"1; 0"22 = 0"2; 0"11 = 0"1; 0"22 = 0"2; О"зз = О"з;
= 0"4; О"В = 0"5; 0"11 = 0"6' ЗначеIПiЯj = 4-6 хараll."Геризуют nьезоэф­
пряжения, полагая
0"13
фект при воздействии двух равных, но противоположных по на­
правлеlПlЮ касательных напряжеIПIЙ, вызывающих деформацию
сдвига.
17
Пава
Установлено,
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
что
значительная часть
пьезомодулей равна
нулю, другие равны между собой по абсолютным значеlПlЯМ или
связаны простыми соотношенит.rn
[9],
Так, матрица пьезомоду­
лей монокристалла кварца представляется :как
dH
-ан О
d l4
О
О
О
--4"
О
О
О
О
-2а"
(1.1)
О.
Матрица пьезомодулей большинства П:КМ имеет вид:
d l5
dл
dл
dзз
а"
О
О
(1.2)
О.
ИЗ приведенных матрщ следует, что пьезоэффе:кт проявляется
не при любых формах нагружения. Различают следующие основ­
ные ТИПЫ деформации пьезоэлементов: растяжеЮl~жатие (про­
дольное и поперечное), сдвиг и всестороннее сжатие,
При расчете характеристик датчиков вместо значеlПlЯ пьезомо­
дуля иногда удобно использовать пьезокоэффициент g;; который
является постоянной IПvf при работе в режиме холостого хода,
Эта постоянная определяется как напряженность эле:rcrpического
поля между электродами пьезоэлемента при разомкнутой цеIШ,
вызванная единичным мехаЮlческим напряжеЮlем
[10]:
(1.3)
где
h,
S - высота и площадь пьезоэлемента;
& = &"Г/&0 - относительная диэлектрическая проницаемость;
&"Гij
_
диэле:rcrpическая ПРОffilцаемость П:КМ в свободном со­
стоянии, измеренная на частоте, много меньшей частоты собс­
твенного резонанса пьезоэлемента;
18
1.1. Кратхце сведения Q
{:о
nьезоэлexтpuчecкwc мшnерUШ/lJХ
= 8,84·10-]2 Ф.м-] - диэлектрическая проющаемость ваку­
ум.,
Коэффициент
gij удобен для расчета выходного напряжения
пьезоэлектрических преобразователей без учета влияния шунти­
рующей емкости,
из МОНОII..""ристаллических пьезоэлектриков в эталОlПlых акселе­
рометрах используется кварц, а в высокотемпературных
-
ниобат
лития И, очень редко, турмалин. В последние годы на предпри­
ятиях ОАО «ПьеЗQ) и ОАО (Фомос-Материалс» выращиваются
монокристаллы лантангаллиевого танталата (лангатата) и лан­
тангалиевого силиката (лангасита), по стабильности параметров
близкие к кварцу, но обладающие более высокими значеlПlЯМИ
пьезомодулей, диэлектрической проницаемости и предельной ра­
бочей температурой
В табл,
1,1
[11],
приведены параметры некоторых монокристаллИ­
ческих пьезоэлектриков, которые используются в высокостабильных или высокотемпературных датчиках.
Таблица
1.1
Параметры пъезоэлектрпчеСЮIХ монокристаллов
Параметр
10- , Кл/Н:
-<1"
Кварц
Ниобат
Тyp~H
Лангатат
Пьезомодулъ,
а"
2,31
0,67
а 15
6,5
4,7
78
19
1,3
19
7,1
4,6
30,0
3,7
80,3
573
1210
400
760
600
600
а"
а"
а"
1,8
Относительная
диэлеll:трическая
проницаемость, в
Теr.шература точки Кюри,
Т.., ОС
Максимальная рабочая
теr.шература, ос
19
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
в настоящее время существует широкая номенклатура ПКМ
отечественного и зарубежного производства, предназначенных для
рaз.rшчныx технических целей, В табл.
1.2 приведены усредненные
[4, 5,
значения некоторых элекrpофизических характеристик ПКМ
12, 13], которые могут применяться в
акселерометрах,
Таблица
1.2
Параметры пьезокерамическпх материалов
;
Ii
'~"
i
~ ~ ~ о
I[i~i " [
~
~
H~"
~
i!
~~
ЦТС-19
330
&~
~
i~
~~
Н!
:>i ~
I
§
~
~
~
300
70
ЦТС-21
40
100
500
400
150
ЦТС-26
160
320
1650
350
80
ЦТБС-3
135
290
2150
180
200
ЦТСНВ-1
160
400
2250
240
70
ЦТС-83Г
140
270
1350
360
-
тв-з
0,9
14
170
650
-
Россия (НКТБ
IПВ
3
24
130
640
-
«Пьезоприбор~~ ЮФ У)
ТНВ-1
0,7
8
170
930
-
ПКР-7
259
528
3300
220
75
Россия (НИИ
ПКР-7М
ззз
718
4760
175
60
фпзикиЮФу)
PZT-4
125
290
1350
325
500
1750
PZT-5A
170
370
1750
325
75
PZT-5H
270
590
3400
193
65
-
15
175
650
-
Р14
20
160
~
~~
~
~
~
Россия
CIIlA
1.1. Кратхце сведения Q
nьезоэлexтpuчecкwc мшnерUШ/lJХ
Для большинства ПКМ системы ЦТС
дуля
dl5
превышает dзз в
1,3-1,6 раза.,
(PZT) значение пьезомо­
&Зl = &"гз/&о составляет при­
мерно (О,85-О,9)&зз, ориентировочная механическая прочность на
разрыв лежит в пределах
27-35
1vПIа, на сжатие
- 270-300
1vПIа
[3-5].
Одной из важнейших характеристик ПКМ является температу­
ра фазового перехода (точка Кюри, Т), при которой имеет место
максимум диэлектрической проmщае~ости и необратимо исчеза­
ет остаточная поляризованность. От значеIШЯ температуры точки
Кюри зависит предельно допустимая температура ПЮvl, то есть
та максимальная температура, при которой еще не происходит
необратимых изменеffilЙ характеристик, Для БОЛЬШШlства ПКМ
она лежит в пределах (О,5-О,8)Т (в ОС),
Верхняя ГРaIшца рабочего д:rапазона температур пьезоэлект­
рического устройства зависит от ограничеIШЙ, накладываемых
на
допустимые
температурные
изменеIШЯ
его
характеристик
и, естествеmю, не может превышать предельно допус'Тl-DYJYЮ тем­
пературу ПКМ,
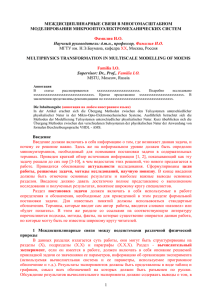
Связь максимальных значеЮlЙ пьезомодуля и диэлектрической
ПРОffilцаемости с температурой точки Кюри различных групп ПМ
иллюстрируется рис,
1.2.
lПvI в группах с различной температурой точки Кюри
ПЮvf с температурой фазового перехода до
300-400 ос выпол­
нены на основе оксидов ЦИРКОlШЯ, титана и СВШlца. Для придания
им особых свойств, например повышенной мехаЮlческой доброт­
ности, стабильности к воздействию мехаIШческих нагрузок или
температур, составы МОДИФlЩируются различными добавками.
Более высокотемпературные материалы выполнены на основе
модифицированных титаната ВИС~IYТа (ТВ-З)
обата висмута (ТНВ-1)
[14]
и титаната-Юl­
[15].
Химический состав в значительной степени ВШlЯет и на коэф­
фициенты линейного теплового распшрения (КЛТР) ПКМ, от­
личающиеся по направлениям к полярной оси. Значения КЛТР
(в 10~ гpaд-l) зависят от температурного диапазона и лежат в пре21
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
dн. ПКлJН
ЕТззlЕо
800~
4800
=':S
4500
700--
4200
750
- -
650--
3900
- -
600-550
-
=Шl{~
Г:ТF"'=j="'---f--j--j -=- dзз
--
-\-t-f--j--j ·· ..···-ЕТззlЕо
3600
-
3300
3000
2700
2400
2100
1800
1500
200EИnm~ШI
150+---j_!ifIij1mi--=~=cI\-_+---j_+_f-+_+-t
1200
900
50
100
Рис.
200
300
400
500
600
700
800
900
1000 Тк • "С
1.2. Значения пьезомодуля и диэлектрической ПРОIПЩaeмости
пм В грушш:х с различной температурой точки Кюри
22
1.1. Кратхце сведения Q
nьезоэлexтpuчecкwc мшnерUШ/lJХ
делах: для составов ЦТС от минус
мута от
5,8
до
9,4
1,1
до
3,6;
для титаната вис~
и для титаната~ниобата висмута от
7,2
до
10,1
[4,16].
Следует принимать во внимание, что электрофизические xa~
рактеристики пьезоэлементов могут заметно изменяться со Bpe~
менем или под влиянием таких внешних воздействий, как TeM~
пература, механические нагрузки, электрические поля и прони~
кающая радиация. При этом наблюдаются как обратимые, так
и необратимые изменения.
Естествешюе
старение
П:КМ характеризуется
снижением
значений пьезомодулей и диэлектрической ПРОIПIцаемости от
времеIПI приблизительно по экспоненциальному закону
[16, 17]
и приводит к повышению стабильности характеристик к ВОЗ­
действующим факторам
[18],
Выдержка пьезоэлементов при
воздействЮI повышенной температуры позволяет ускорить этот
процесс.
Статическое давлеlПlе также приводит к СlШженИIO пьезомо~
дуля. При превьппеlПlИ :критического значения давления, опре­
деленного ДЛЯ каждого состава ПЮvl, набmoдается необратимое
изменение nьезомодуля, В случаях комплексного воздействия
давления и температуры эффекг влияния каждого из назваIПIЫХ
факторов усиливается, что может использоваться для искусствен~
ной стабилизации свойств пьезоэлементов путем термобаротре­
НИРОВIill
[4].
Воздействие :кратковременных импульсных или знакопере~
менных механических нагрузок влияет на характеристики ПКМ
в значительно меньшей степеlПl, чем длительных статических, что
может объясняться определенным временем релаксации внутрен­
него поля - одного из механизмов стабилизации
на
работу
пьезоэлектрического
датчика,
[19],
при
некоторых
условиях эксплуатации, может влиять пироэффекг, присущий
IПvI, Пироэффект проявляется при изменеIПIИ температуры пье~
зоэлемента и вызывается изменением спонтанной поляризации
в результате тепловой деформации :КРИСТaJIШlческих ячеек. это
23
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
приводит К появленшо разности потеIЩИалов на электродах
20].
[13,
Если изменение температуры происходит за вре~lЯ, меньшее,
чем время, необходимое для полного стекания возникшего заря­
да, то могут быть искажены результаты измереЮlЙ или даже на­
рушена работа первичного эле:rcrpоlПЮГО устройства. В режимах,
близких к холостому ходу, изменение температуры в
1 град может
вызвать разность потенциалов до нескольких десятков вольт, по­
лярность сиrnала, возникающего в результате пироэффе:rcrа, свя­
зана с характером ИThIенеlПlЯ температуры и направлеЮlем век­
тора остаточной поляризованности, В силу тепловой инерцион­
ности датчика, rшpосигналы ПРОЯВЛЯIQТся только на очень низких
частотах, как правило, Юlже
1.2. Устройство
1-3 Гц,
11 работа пьезоэлементов
в БОЛЬШlПIстве реальных конструкций пьезоэлектрических
датчиков,
включая
акселерометры,
используются
пьезоэлемен­
ты с деформацией растяжеlПlЯ---<::жатия (компрессионные), изгиба
ИJПI сдвига.
При продольной, относительно вектора остаточной поляризо­
ванности, деформации растяжения---<::жатия, если сила
F
воздей­
ствует на пьезоэлемент нормально к плоскостям его электродов
(рис,
1,3),
то, согласно определеншо прямого пьезоэффе:rcrа, на
последних возникает электрический заряд
[1 О]
(1.4)
При этом разность потеlЩиалов
и~
где С
-
Q/C ~ d"F/C,
(1.5)
суммарная эле:rcrpическая емкость пьезоэлемента и под­
ключенных к нему элементов внешней цеШI (ПРОВОДЮlков, разъ­
емов, входа регистрирующего устройства и др.),
24
1.1.
УсmроШ:m8Q и работа nьеэОЭJJl!.}lенлюв
ф=
~_~----~t:__:--
-1"""...............,--+
Рис.
а
-
1.3.
сжатие;
-------
.
-------
.
+
Продольная деформация пьезоэлемента:
6-
растяжение; пymrrиром показан характер
ИЗ1\.Iенения геометрии пьезоэлемента
Полярность сигнала зависит от направления деформации отно­
сительно вектора остаточной поляризованности. Например, при
продольном сжатии знаки потенциалов электродов совпадают со
знаками потеIЩИалов при поляризации (рис.
1.1
И l.3а), а при рас­
тяжеlПlИ положительный потенциал ВОЗlПIкает на том электроде,
который при поляризации находился под ОТРlЩательным потен­
циалом (рис.
1.1
и
Как следует из
IПlкающего
1.36) [21].
(1.4, 1.5), значеlПlе
электрического заряда, воз­
при продольной деформации растяжеlПlЯ---сжатия
под воздействием определешюй силы, не зависит от геометриче­
ских параметров пьезоэлемента и площади, к которой приложена
сила, а определяется исключительно значением пьезомодуля dзз .
Так как значение разности потенциалов на электродах зависит от
электрической емкости пьезоэлемента, то оно будет определяться
не только значением пьезомоДУля, но зависеть от высоты, пло­
Щади пьезоэлемента и диэлектрической ПРОlПlцаемости ПМ. Ес­
тествешю, что вышеизложешюе справедливо для случаев, когда
механическая нагрузка и электрическое поле не превышают кри­
тических значений, приводящих к нелинейности свойств ПМ.
для увеличения генерируемого заряда при неизменном зна­
чеlПlИ приложенной силы
нескольких
[22],
пьезоэлемент может состоять из
слоев с расположенными между lIИ1vШ электродами.
25
Пава
На рис,
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
1.4 показаны однослойный и многослойный,
состоящий из
n слоев, пьезоэлементы, имеющие ОДШIaковые высоту h! И площадь
s, на которые действуют равные силы F, Электроды ],пюгослойного
пьезоэлемента электрически соединены параллельно и синфазно,
Рис.
1.4. Ilьезоэлементы с различн:ы:м количеством слоев:
а - однослойный; б - многослойный
для рассмотрения работы многослойного пьезоэлемента обо­
значим
электрическую
емкость
однослойного
С!, а генерируемые им заряд и напряжение
и и!=
Q/C!
пьезоэлемента
- как Q! = dз.f"/С
соответственно, Поскольку электрическая емкость од­
ного слоя рассматриваемого многослойного пьезоэлемеmа., еCJПI
пренебречь толщиной электродов, будет в
n раз больше емкости С!,
то при парaJШельном соеДШlеюlИ слоев полная электрическая ем­
кость многослойного пьезоэлемента по сравненШQ с однослойным
возрастает в
n1
раз, из
(1.5)
следует, что электрическое напряже­
ние на электродах каждого слоя и выводах пьезоэлемента снижа­
ется, а заряд возрастает пропорционально КОШlЧеству слоев. Гене­
рируемая многослойным пьезоэлементом электрическая энергия
::о сn и;'/2::о СР12/2 не зависит от количества слоев. То есть для
w.. .
пьезоэлемента, состоящего из
n
слоев, элекrpически соединенных
параллельно и синфазно, а меxaIOlЧески
-
последовательно, ем­
кость, напряжеЮIе, заряд и электрическая энергия, по сравненШQ
с однослоЙНЬD,.1 пьезоэлементом тех же габаритных размеров, бу­
дут иметь следующие относительные значения:
C~ ::оn 2 с!,
26
1.1.
УсmроШ:m8Q и работа nьеэОЭJJl!.}lенлюв
Uл=..!.UJ ,
n
Qл=nQI'
(1.6)
w,.,,=w,.J'
Таким образом, использоваЮlе многослойной конструкции
пьезоэлемента является ОДlПIм из путей повышения электриче­
ской емкости и заряда в условиях неизмеlПlЫХ габаритных разме­
ров и действующей СИЛЫ, но не изменяет значение генерируемой
электрической энергии,
При поперечной деформации растяжеlШЯ---Сжarия (рис,
1.5),
еCШI силаF воздействует на пьезоэлемент параллельно плоскостям
его электродов (рис, l.5а,
1.56), возникает электрический заряд [4]
(1.7)
где
s, и So -
площади одного из электродов и поверхности, к Ю)'Iо­
рой приложена сила,
Рис.
1.5. Поперечная деформация растяжения--ежатия
пьезоэлеменrа: а - сжатие; 6 - растяжеЮIе;
в - ДВУосное сжатие
27
nаfIа.
1.
Знак «Шlнус}} в
ПЫ!30ЗЛf!lйtI.J1IiЧl!<XIе J,tШ1I.ерШlЛЫ и зле:шщmы
(1.7) означает, что
изменеlПlе характера дефор­
мации с продольной на поперечную приводит К противополож­
ной полярности сигнала на электродах.
Если к свободным от электродов поверхностям пьезоэлемента
приложены сJШЪJ
F]
иF2 (рис. l.5в), то есть имеет место двуосная
поперечная деформация, то значеJПIЯ генерируемых зарядов, вы­
званных каждой силой, алгебраически суммируются:
Q=-(Q+Q)=-d (~F+~F),
]
2
31 SO\
I
Sf12
(1.8)
2
где SOl И S02 - площади поверхностей, к которым приложены СИЛЫ
F 1 И Р2 соответственно.
Физический смысл зависимости заряда от отношения
глядно поясняется следующими примерами (рис.
1.6).
2а
Рис.
1.6. Примеры разJlliЧНОЙ конфигурации
пьезоэлемептов
28
s,Iso
на­
1.1.
УсmроШ:m8Q и работа nьеэОЭJJl!.}lенлюв
Представим в качестве базового пьезоэлемент в форме парал­
лелешmеда с размерами а х Ь х с и электродами на противопо­
ложных поверхностях площадью $, (рис, 1,6а), со следующими
параметрами:
- площадь :каждого электрода $ = аЬ;
- площадь, на которую воздейс~ует сила, $0 = Ьс;
- электрическая емкость C 1 ;
- возникающий при воздействии силы Fзаряд Ql;
- разность потенциалов между электродами и1 = Q/C1,
Рассмотрим случаи, когда каждый пьезоэлемент состоит из
двух базовых пьезоэлементов, соединеlПlЫХ друг с другом в одно
целое тремя возможными способами (рис. 1.66-1,6г). ТО есть
можно считать, что они состоят из двух равных частей, для на­
глядности разделенных на рисунках штриховой линией.
для пьезоэлемента (рис.
1.66),
с учетом того, что площадь его
электродов не изменилась, а площадь, на которую действует сила
F,
и расстояние между электродами УДвоились, электрическая ем­
кость
С/2.
C1 =
Силу. действующую на поверхность площадью
2$0'
можно
условно разложить на две равные силы со значеlПlем Р/2, одно­
временно действующие на каждую из частей пьезоэлемента пло­
щадью
$0 И
создающие в них вполовину меньшие механические
напряжеmIЯ, чем в базовом пьезоэлементе. Следовательно, раз­
ность потенциалов и заряд каждой из частей тоже будут вполови­
ну меньше, а при их электрически последовательном соединении
имеет место;
-
разность потенциалов между электродами
заряд
U1 = U1 ;
Ql = U1C1 = Q/2,
для пьезоэлемента (рис. 1,6в) электрическая емкость Сз =
2C1 •
так как его электроды по площадям вдвое превосходят электро­
ды базового элемента, а раССТОЯlПlе между IПIми не изменилось,
Так :как в :каждой из двух частей пьезоэлемента под воздействи­
ем силы
F
возникают такие же механические напряжения, что
29
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
и в базовом пьезоэлементе, то при их параллельном электриче­
ском
соединении разность
потенциалов не
изменяется, а заряд
удваивается, то есть:
-
разность потеIЩИалов между электродами ИЗ = И1 ;
-заряд Qз = ИзСз =
2Ql'
Очевидно, что для пьезоэлемента (рис, 1.6г), имеющего, по
сравнеmпo с базовым, вдвое большие площади поверхностей
электродов и приложеIШЯ силы:
-
электрическая емкость С4
= 2C1 ;
разность потеIЩИалов между электродами И4 = И/2;
-заряд
Q4 =
И4 С4 =
Ql'
Таким образом, заряд, возникающий при поперечной деформа­
ции пьезоэлемента в форме параллелеrnшеда при фиксировашюй
силе, зависит от отношеIШЯ площади электрода к площади поверх­
ности, к которой приложена сила,
Этот результат становится также очевидным, еCШI рассмотреть
уравнение прямого пьезоэффекта в матричном виде
[4]:
(1.9)
где Dз = Q/S,з
-
электрическая:индукция,:ИЛИ поверхностная IШОТ­
ность заряда Qз на площади с нормалью, параллельной оси
3
или IШОЩади электродов s,з;
<\ -
механические напряжения, ВОЗlШкaIQщие под действием
силы
F, приложешюй к площади SOi;
i = 1, 2, 3 - направление нормали к соответствующей
оси.
Так как для ПКМ dл = dл • то
(1.10)
где
n-
количество слоев в пэ.
Если 0"1 = 0"1 = О, то есть заряд при единичной силе возрастает
с увеличением количества слоев, а при
ла
30
(1.4).
n = 1 имеет место
Фор:му­
1.1.
УсmроШ:m8Q и работа nьеэОЭJJl!.}lенлюв
Эле:rcrpическое напряжение
если емкость пьезоэлемента :много больше емкости подключен­
ной к не:му внеIШIей цепи, то и пропорционально константе
g ЗJ
и возрастает с уменьшеЮlем расстояlПlЯ между эле:rcrpодaI01,
Qз = dЗlF s,/SOI' еCШI о"з = 0"1 = О, то есть заряд при единичной
силе возрастает с увеличением соотношения S/SOl'
Пьезоэлементы,
правило,
состоят
работающие
с
деформацией
мИIПlМУМ из двух жестко
изгиба,
как
связанных пластlПI
[23-26], так как при изгибе ОДlПIочной пластlПIЫ из пьезоэлектри­
ка со сплошными эле:rcrpодами, генерируе~IЫе в ней эле:rcrpичес­
кие заряды будут взаимно компенсироваться.
Примером пьезоэлемента с деформацией изгиба может слу­
жить изображенная на рис. 1,7 балка, выполнеШIaЯ из двух пье­
зокерамических ШIaСТИН ОДlПlaIФвой толщины, жестко соеДlПlен­
ных между собой по плоскостям эле:rcrpодов, Такие пьезоэлемен­
ты принято называть биморфными
Рис.
[27].
1.7. Балочный биморфный пьезоэлемент:
а - :конструкция пьезоэлемеша;
б - эпюра механических напряжений
31
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
При изгибной деформации под воздействием силы
F
каж­
дый из участков верхней и ШlЖНей пластин подвергается воздей­
ствmo сжимающих
Fo
или растягивающих Рр сил, направленных
вдоль длины балки перпенд;икулярно Bercropaм остaroчной поля­
ризованности Ро ' Как видно из эmoры меХ3Iшческих напряжеIШЙ
(рис.
1,76),
знак деформаЦJ-Ш изменяется на противоположный
при переходе через нейтральную плоскость, лежащую на грашще
пласТIПI, При этом на электродах каждой из пластин за счет пьезо­
модуля dЗl возникает электрический сшнал, полярность которого
определяется направлениями деформации и Ро ' для снятия сшнала
с двух пластин последние должны быть соединены либо последова­
тельно (при встречных направлеЮIЯX Ро ' как показано на рис,
1.7),
либо параллельно (еCШI РО направлены в одну сторону),
Очевидно, что при последовательном включении пластин, раз­
ность ПOI"eIЩиалов на внешlПlХ электродах, по сравнеlШЮ с одной
пластиной, удваивается, емкость уменьшается в два раза, а заряд
остается без изменения, При параллельном включении
-
напря­
жеlПlе не изменяется, емкость и заряд возрастают в два раза.
Отличие в толщинах пластин Сffilжает эффективность работы
биморфного элемента, так как в пластине с большей толщиной,
за счет смещеlПlЯ нейтральной плоскости внутрь последней, име­
ют место деформации противоположного знака и, следовательно,
частичная
взаимная
компенсация генерируемых
электрических
зарядов,
Помимо балочных конструкций, пrnpоко используются диско­
вые биморфные пьезоэлементы, состоящие из двух круглых пье­
зокерамических пластин (рис,
1,8).
При работе дисковый биморфный пьезоэлемент может иметь
центральное закреплеffilе или быть свободно оперт по перифе­
рии. Воздействие на него нормальной к поверхности электродов
и равномерно распределенной силы приводит К изгибу пьезоке­
рамических пластин, при этом одна из которых стремится сжать­
ся, а вторая растянуться в радиальном направлеlПlИ, В результате,
в каждой элементарной ячейке слоя возникают нормальные 0""
з2
1.1.
УсmроШ:m8Q и работа nьеэОЭJJl!.}lенлюв
и тангеIЩиальные От деформации в поперечном, относительно
вектора остаточной поляризованности, направлеюш (рис.
1,86),
Генерируемые при этом заряды суммируются, аналогично СЛУ·
чаю, показанному на рис.
1.58. В
остальном принцип работы д;ис·
кового биморфного пьезоэлемента и порядок электрического со·
единеlПlЯ электродов идентичны балочному,
Рис.
1.8. Дисковый биморфный пьезоэлемеш:
о
-
:конструкция пьезоэлемента;
б - мехаIШЧес:кие напряжения в слое
Существуют другие варианты выполнения изгибных пьезоэле·
ментов (рис,
1,9).
3e~ б..Q·
.
~
=~{кr)
Рис.
1.9. Варианты изгибных пьезоэлеменroв
с целью повышения прочности между двумя пьезокерамиче·
скими пластинами в некоторых случаях помещается тонкая арми­
рующая металлическая пластина (рис,
1.90).
Широкое применение :имеют изгибные пьезоэлементы, состо·
ящие из соединенных вместе пьезокерам:ической и метamшчес3з
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
кой пластин (рис.
1,96),
иногда называемых униморфными или
асимметричными, Естественно, электрический заряд генерирует­
ся только одной пьезокерамической пластиной. Так как использу­
емые материалы могут существенно отличаться по механическим
свойствам, эффективность работы рассматриваемого пьезоэле­
мента зависит от выбора соотношения толщин активной и пас­
сивной пластин
[5].
В некоторых дисковых изmбных пьезоэлементах с металли­
ческой пластиной последняя выступает за пределы пьезокерами­
ки и используется для их периферийного закрепления.
ПовышеЮlе генерируемого заряда изгибных пьезоэлементов,
при сохранеюш их габаритных размеров, может достигаться за
счет увеличения количества пьезокерамических пластин при их
параллельном электрическом вкmoчеЮlИ (рис.
1,9в)
[28].
Еще
один способ повышения заряда заключается в том, что изгиб­
ный элемент вьпюлняется из трех пьезокерамических слоев. При
этом внешние пьезоактивные слои электрически соеДlПlены па­
раллельно (рис. 1,9г), а внутренЮlЙ слой является пассивным,
ИЗ эmoры механических напряжеЮlЙ (см. рис.
1.76) видно, что ос­
новной вклад в генерируемый заряд вносят области, удаленные от
нейтральной плоскости и имеющие максимальную деформацию.
ПО мере уменьшения толщины внешних слоев до определенных
пределов, их электрическая емкость растет быстрее, чем умень­
шается разность потеlЩИалов между электродами, что приводит
к возрастаЮlЮ суммарного генерируемого заряда по сравнеlШЮ
с обычным биморфным элементом, Например, если промежуточ­
ный слой выполнен из П:КМ того же состава, что и внеШЮlе слои,
то оптимальным является случай, когда толщина внутреlПlего
слоя составляет примерно третью часть от общей ТОЛЩIПIЫ эле­
мента, При этом заряд может возрасти до
1,5 раз [29].
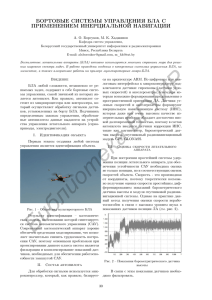
В Н:КТБ «Пьезоприбор» проводились испытания изгибных
пьезоэлементов, выполненных в виде одиночной пьезокерами­
ческой пластlПIЫ
1
(рис,
1,1 О)
с тангеlЩиальной поляризацией
зоны, расположенной по одну сторону от нейтральной плоскости
34
(направление результирующего вектора остаточной поляризован­
ности показано стрелками).
Рис.
1.10. Изгибный пьезоэлемент с
поляризацией: а
1-
-
тангеlЩИальной
общий вид; б - продольный разрез;
пьезокерамическая IШастина;
2, 3 -
элекгроды
для поляризацШl и съема сигнала ИСПОЛЬ3Qвались электроды
2, 3
гребенчатой формы, нанесенные на поверхность IШастины.
В рассматриваемом случае заряд генерируется за счет продольной
деформации наполяризованных участков, то есть используется
пьезомодуль dзз • Благодаря конфигурации электродов, такой пье­
зоэлемент, по сравнеmпo с обычным БИМОРфIlЬПYl, характеризуется
меньшей электрической емкостью и более высоким генерируемым
напряжеmrем. При достаточной толщине пластины, аналогичные
электроды могут быть нанесены на двух ее сторонах
1.3. Конструкции
[30].
и способы изготовления многослойных
пьезоэлементов
Конструкции многослойных пьезоэлементов различаются по
способам механического соединения отдельных пластин из ПfvI
между собой, ком:мутации элекгродов и выполнения электриче­
ских выводов.
Наиболее распространены следующие способы соединения
пластин
-
[5, 10]:
упругое поджатие (В составе преобразователя);
склеивание;
35
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
-пайка;
-
сварка,
Упругое поджатие осуществляется, :как правило, при помощи
элементов :конструкции преобразователя, имеющих резьбовое со­
едШIeние, При этом могут применяться центральные или перифе­
*
рийные силовые элементы (рис. 1,11).
76
,
3
.:
.....-1
,
Рис.
2
1.11. Примеры упругого поджатия пьезоэлементов:
(8) поджатием;
с центральным (о, б) и периферийн:ым
1-
пьезоэлемент;
2-5 - элементы конструкции
6 - пружина; 7 - винт; 8 - шпилька;
9 - обойма шrn :корпус
преобразователя;
в системе поджатия может содержаться отдельный упругий
элемент, например плоская пружина, ИJШ использоваться соб­
ствеШIaЯ упругость силового элемента" например шпильки или
стенок обоймы, Механические характеристики силовых эле­
ментов
и
усилие
поджатия
оказывают
существенное
влияние
на характеристики преобразователя, в том числе на :коэффици­
ент преобразования, добротность и резонансную частоту
[31].
для эффе:ктивной работы пьезоэлемента, особенно на частотах
ffilже собственного резонанса, важно; чтобы мехаffilчески шун­
тирующая жесткость систе~IЫ поджатия была ~тoro меньше его
собственной жесткости, При конструировании датчика; предпоч­
тительнее использовать центральное поджатие, не вызывающее
перекоса пластин пьезоэлемента.
з6
Основной особенностью упругого поджатия является созда­
ЮIе предварительного сжимающего механического напряжения
пьезоэлемента, В этом случае, при воздействии знакопеременной
силы, в пьезоэлементе отсутствуют растягивающие напряжения.
Такие конструкции характеризуются повышешlOЙ прочностью
и надежностью,
Для склеивания часто используются эпоксидные или токопро­
водящие клеи. Встречаются преобразователи, сочетающие упру­
гое поджатие и клеевое соединение пьезоэлементов,
Пайка производится припоя:ми, содержащими олово, свинец
и некоторые другие добавки, определяющие теШIературу плавле­
НИЯ, котораянедолжнапревьшшть предельную рабочую теШIерату­
ру ПКМ. Обязательным является при:менение флюса, соответству­
ющего составу пршюя и материалу спаиваемых поверхностей,
Одним из основных недостатков клееных и паяных пьезоэле­
ментов является их сравнительно невысокая рабочая темпера­
тура, ограниченная предельной температурной стойкостью клея
или припоя до
100-250 ос,
Применяются различные способы ком:мутации электродов
и выполнения выводов (рис,
Рис.
1.12),
1.12. Примеры коммутации элекгродов и вьrnолнения
- с использованием токосъемных
выводов пъезоэлемента: а
прокладок;
1-
6, 8 -
С пршrnянными проводниками;
пъезокерш.шчес:кая пластина с элекгродш.ш;
3-
провоДIПlК;
4-
2-
прокладка;
элемеш конструкции преобразователя
37
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
Часто в упруго поджатых; склееlПlЫХ и спаяlПlЫХ пьезоэле­
ментах выводы выполняются при помощи фольговых прокладок
С последующим их соединением между собой и с внеШIПlМИ про­
водЮlКЗМИ (рис,
является
l.I2a),
увеличение
Общим недостатком таких конструкций
количества
сопрягаемых
межэлементных
поверхностей и наличие разнородных по физико-механическим
свойствам материалов.
Если ТOЛЩJПIа пьезокерамической пластины допускает; в ней
могут быть совместно с электродом ВЬПIолнены меташшзирован­
ные углубления (рис, 1,126):или вырезы (рис,
1,126), позволяющие
припаять ПРОВОДЮlк непосредственно к элекrpoду. В связи с малой
прочностью сцепления электрода с керю.mкoЙ; рекомендуется до­
пomштельное крепление таких выводов с помощью клеяили ИIlЬ]}vI
способом, Наличие углублеЮlЙ или вырезов в пьезокерамических
ПЛЗСТIПlах является ИСТОЧЮlКOм дополнительных локальных меха­
нических напряжений и искажает осевую симметрию пьезоэлемен­
та; что может отрlЩательно сказаться на работе преобразователя,
Для защиты от влаги собраlПlые пьезоэлементы покрывают ла­
ком или заливают компаундом.
Технологии изготовления многослойных пакетов из ПКМ;
усовершенствоваlПlые
в
Н:КТБ
((Пьезоприбор»;
повысить их температурный предел до
400-600
позволяют
"С
[32; 33].
Для получения многослойных пьезоэлементов используются
два различных технологических процесса: сварка пакета одно­
времешlO со спеканием ПК и сварка предварительно спечеIПIЫХ
керю.шческих заготовок.
В первом случае свариваемые поверхности заготовок; ВЬПIол­
неlПlЫХ из прокатанной IIIЛикерной пленки; состоящей из порош­
ка пкм и :каучуковой связки, покрывают ШIaтиносодержащей
пастой, после чего спрессовывают в пакет (рис,
1,13) и
подверга­
ют обжигу до температуры спекания.
В процессе обжига слои керамики и восстановлеIПIОЙ из пасты
металлической платины, являющиеся электродами, свариваются.
Коммутация эле:rcrpодов осуществляется двумя серебряными до­
з8
рожками, нанесенными с противоположных сторон на боковую
поверхность путем вжигания серебросодержащей пасты после
шлифовки пакета. ТОЛЩlПlа керамических слоев в пакете варьи­
руется в пределах от О, 1 до
1 мм, а их КОШlчество может достигать
нескольких десятков, Поляризация проводится после коммутации
электродов.
П,:
~7
,
9
Рис.
1.13. Многослойный пьезоэлемент, выполненный
- схема укладки пакета;
б - продольный разрез пьезоэлемента;
1,2 - заготовка из IШШкерной ШIенки; 3 - покрытие
ШIапшосодержащей пастой; 4 - электрод;
5 - ком:мутационная дорожка; 6 - пьезоaкrивный слой;
7 - вывод; 8, 9 - изолирующая накладка
сваркой в npоцессе спекания: а
Образцы пьезоэлементов, ИЗГOТQвлеIПIые по описанной техно­
логии, показаны на рис,
Рис.
1.14.
1.14, Многослойные пьезоэлементы,
изготовленные по технолоГJШ сварки
в процессе спекаIШЯ
39
Пава
1. Пьезоэлектp1iЧECКUе },/шnерШlЛЫ и эле:шщmы
к недостаткам таких пъезоэлементов следует отнести: наличие
участков снеоднородной поляризованностью, вызванной асим­
метричной формой электродов; возможность окисления серебря­
ных коммутационных дорожек при ДШlтельной работе в условиях
воздействия температуры вьппе
400
ОС; необхо.дт.'IOСТЬ использо­
вания дорогостоящей IШатиносодержащей пасты.
При втором технологическом процессе предварительно спе­
чеlПlые и ШЛИфОВ3lП1ые по обеим плоскостям пьезокерамические
заготовки с хордовыми канавками металлизируют с двух сторон
путем вжигаЮIЯ серебросодержащей пасты и складывают в пакет
с требуемым количеством слоев (рис,
Рис.
1,15).
1.15. Многослойный пьезоэлемент,
выполненный
сваркой предвариrельно спеченных керамических
заготовок: а - схема укладки пакета; б - пьезоэлемент
с коммутационными проводни:кт.m; в
продольный разрез пьезоэлемента;
заготовка;
3-
- частичный
1,2 - кершшчес:кая
4, 5 - порядок
серебряное покрытие;
коммутации;
6 - пъезоактивный слой;
7, 8 - коммутационный проводник;
9, 10 - изолирующая накладка
в условиях одноосного сжатия пакет выдерживают опреде­
леlПlое время при температуре, обеспечивающей диффузионную
сварку серебряных покрытий. для выводов и коммутации элек-
40
тродов, после сварки и ШШlфовки пакета до заданных размеров,
через хордовые :канавки проnyскают устойчивые к термическому
окислению проволочные проводники
[34],
С целью повышения
надежности эле:rcrpического контакта ПРОВОДIППffiМ в зоне :канав­
ки придают форму зигзага или цилиндрической спирали,
из
технологических
соображений,
одного пьезоактивного слоя составляет
зоэлементов,
на рис,
ИЗГQТOвлеIПIЫХ
по
МlПIимальная
0,5
ТОЛЩlПlа
мм, Примеры пье­
такой технологии,
показаны
1.16,
Рис.
1.16. Многослойные пьезоэлементы,
изготовленные по технологии
термодиффузионной сварки
РассмотреIПIые технологии позволяют получить монокерами­
ческие многослойные пьезоэлементы с приваренн::ыJ\.ПI к торцам
изолирующими
накладками,
выполненными
из
неполяризован­
ного п:км одноименного состава, предназначеlПlые для работы
с деформацией растяжеlПlЯ---<;:жатия, Они также используются
для изготовления изгибных пьезоэлементов, содержащих от
2
до
12 слоев,
Как показывает практика конструироваlПlЯ различных по на­
значению пьезотеХIШЧеских: устройств, ОДlШм из основных фак­
торов,
ВЛИЯЮЩИХ на их
технические характеристики,
является
совокупность параметров и свойств используемых пьезоэлеменТОВ.
41
ГЛАВА
2
ПРИНЦИП РАБОТЫ ПЬЕЗОЭЛЕКТРИЧЕСКОГО
АКСЕЛЕРОМЕТРА
2.1.
Основные измеряемые параметры виброколебанпй
Самой простой вибрацией является гаРМOIПlчес:кая, когда тело
совершает синусоидальные колебaIШЯ. При этом смещеЮlе ко­
леблющейся точки х (виброперемещение) в момент времени
х =
x.sin(rot + <р)
х = х. cos(rot + <р),
где х
-
t
(2.1)
(2.2)
амплитуда смещения;
ro "= 2лj- круговая частота колебаний;
= lIt - частота колебзlШЙ;
f
't' - период колебаний;
<р - начальная фаза колебаЮlЙ,
В прaR"I'ИКe виброметрии встречается необходимость измере­
lПiЯ разШlЧНЫХ параметров вибрации, которые относятся к сме­
щенШQ и к его производным ПО времеЮl
-
виброскорости, вибро­
ускорения, резкости, частоты основного колебания, спектрально­
го состава и некоторых других, в зависимости от задачи проводи­
мого измерения
[35],
v определяется
Виброскорость
как первая производная смеще­
IШЯ ПО времеIШ, виброускорение а
-
как вторая производная, Тре­
тью производную иногда называют резкостью;
dx(t)
. ,
V=Тt = rox.cos(rot +(J')=v.sш(rot+ Ф +"2)'
42
(2,3)
2.1.
ОС1/0611ые IilмеРЯ8l1ые парамemры вuбрmшлeбmw.Й
а = d2x~t) =-oix
a
dt
sin(rot + <р) = -а. siп(rot+'Р)=-ro 2 х,
и = dЗх~t) =-roЗХа cos(rot+ 'Р) =и а siп(rot+'Р-~),
•
где
v.'
а., и.
-
(2.4)
(2,5)
2
амплитудные значения скорости, ускорения и рез­
кости соответственно.
из
(2.1), (2.3}-{2,5)
следует, что вектор скорости гармониче­
ских колебаний опережает вектор смещения на
вектора ускореЮIЯ также на
n12,
nl2
и отстает от
Колебательное ускореffilе и сме­
щеЮlе, а также скорость и резкость попарно находятся в противо-
фазе (рис.
2.1) [35].
Я
·' ~~
.1!.
.!!:
2
У,
Рис.
2
,
"2
"
2.1. Фазовые соотношения между смещениемх,
скоростью v, ускорением а и резкостью и
гармоюrческоro колебания
Амплитуды смещения, скорости, ускорения И резкости связа­
ны соотношеЮlЯМИ
(2.6)
43
Пава
2.
ПршщWJ работы JJьезоэлeкmpuч=го =елерОШ!Л1рll
Для более полного представлеlПlЯ о воздействии вибрации не­
обходимо также знать значение и направление результирующего
вектора вибрации или его проекций в выбранной системе :коор­
динат
[36].
2.2. Физические основы работы пьезоэлектрических
акселерометров
При измерении параметров вибрации используются два при­
IЩшш измерения
-
кинематический и динамический
[35],
Кине­
матический принцип основан на измерении :коордmшты точки
:контролируемого объекта относительно выбраююй системы КО­
ордmшт, которую условно считают неподвижной, то есть ИThIеря­
ются параметры вибрации относительно какого-либо реального
объекта (относительной вибрации).
Динамический принцип основаннаизмереIШИ параметров виб­
рации относительно искусственной неподвижной системы отсче­
та - инерЦИОIПюго тела, соедШlенного с вибрирующим объектом
через упругий подвес. Приборы, использующие этот ПРШlЦШI, от­
носятся к устройствам Шlерционного действия и осуществляют
измереIШе параметров абсолютной вибрации.
В виброметрШI наиболее удобно преобразовывать информа­
цию о вибрацШI :контролируемого объекта в эле:rcrpический сиг­
нал с последующей его обработкой и регистрацией, для этой цели
используются датчики, или преобразователи, в основе работы ко­
торых лежат различные физические явлеЮIЯ,
ПО прИIlципу действия такие датчики можно разделить на два
класса
-
параметрические и генераторные
[35, 37].
В парамет­
рических датчиках под воздействием измеряемой мехаIШчес:кой
величины изменяется какой-либо электрический параметр преоб­
разующего элемента, модулирующий электрическое напряжение
или ток, создающиеся внешним ИСТОЧIШком, Генераторные дат­
чики осуществляют непосредственное преобразование механи­
ческой энергии в эле:rcrpическую,
44
2.2.
Физические ОСЩЖN работы пьезоэлектрических акселерометров
Преобразователь инерционного действия представляется как
мехаIШческая система с одной степенью свободы колебаний,
имеющая внутреmlИе потери и совершающая вынужденные ко­
лебания под воздействием возмущающей гаРМОIШческой силы со
стороны объекта. из теории :колебаний известно
[38],
что такая
система будет иметь резонансную частоту
(2.7)
где ф о = ~ - циклическая частота свободных незатухающих
колебаний (при ~ ~ О);
j3 -
коэффициент затухаюlJl, обусловленный внутреНlПlМИ по­
терями системы;
k - коэффициент упругости подвеса;
т - масса инерционного тела.
Сдвиг фаз ц)о между смещением и возмущающей силой зави­
сит от соотношеЮIЯ между циклическими частотами вынужден­
ных колебаний
w и свободных незатухающих колебаний ф о :
2~oo
tgq:lo = --,--,.
фо-ш
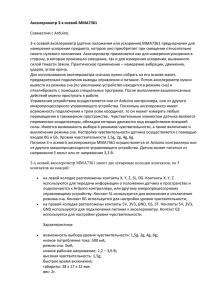
На рис,
2,2
показаны амплитудно-частотные (АЧХ) и фазочас­
ТOТIlыe (ФЧХ) характеристики рассматриваемой системы.
'~.
о
ШО
Рис.
ш
2.2. Частотные характеристики :колебательной
системы: а - АЧХ; б - ФЧХ
45
Пава
2.
ПршщWJ работы JJьезоэлeкmpuч=го =елерОШ!Л1рll
При возрастании коэффициента затухания ~ высота пика на
резонансных кривых снижается (при малых значениях ~ ампли­
туда Ха - lI~, (о
:::::: (00)'
Форма ФЧХ также зависит от ~.
В работах [35, 37, 39] показано, что выбор параметров коле­
бательной системы определяет режим работы преобразователя
инерционного действия:
-
в частотном диапазоне ниже резонанса преобразователь ра­
ботает в режиме акселерометра и измеряет виброускорение;
-
в частотном диапазоне, лежащем по обе стороны вблизи от
резонанса,
-
-
в режиме велосиметра и измеряет виброскорость;
в частотном диапазоне выше резонанса
-
в режиме вибро­
метра и измеряет виброперемещение,
Рассматриваемые в
настоящей работе
пьезоэлектрические
акселерометры предназначены для измереШIЯ вибрационного
и ударного ускорения, относятся к классу генераторных датчиков
и являются контактными средствами измереЮlЯ, то есть жестко
связаны с контролируемым объеIcrOМ и соединены кабелем с конт­
рольно-измерительной аппаратурой, Благодаря ряду присущих
им свойств, такие датчики получили широкое применение в виб­
роизмерительной технике,
ПринцШI работы пьезоэлектрического акселерометра с дефор­
мацией пьезоэлемента типа растяжеlШЯ--сжатия (иногда такие
датчики называются компрессионными) поясняется рис,
2.3,
Упрощенно конструкцию акселерометра (рис, 2.3а) можно
представить:как устройство, состоящее из жестко связанных (на­
пример, склеенных) инерционного элемента
и основания
3,
1,
пьезоэлемента
2
присоединешюе в точке измерения виброускоре­
IШЯ к контролируемому объекry 4, колеблющимся с ускорением а
вдоль оси симметрии датчика
[10, 35].
Простейший мехаЮlческий аналог такого акселерометра вы­
глядит в виде одноконтурной колебательной системы (рис,
имеющей одну степень свободы, Здесь т
-
2,36),
масса инерционного
элемента; k - коэффициент упругости пь~зоэлемента; D - демп­
фер, обозна~ающий внутреmrnе потери в пьезоэлементе.
46
2.2.
Физические ОСЩЖN работы пьезоэлектрических акселерометров
Рис.
2.3. Упрощенная конструкция (а)
и механические
аналоги (б-г) пьезоэлектрического акселерометра
с деформацией растяжения--сжатия
Такое представлеlПlе правомерно в случае принятия следующих
рациональных допущений и условий
-
[35]:
движеlПlе инерциоIПЮГО элемента рассматривается в lПIерци­
альной системе отсчета и происходит только ПО одному направ­
лешпо
-
вдоль оси, перпендикулярной установочной плоскости
контролируемого 06ъeкra;
-
опорой служит тело, обладающее настолько большой массой,
что можно пренебречь обратным действием на нее колеблющихся
элементов, то есть масса контролируемого объекта ПРИIШмается
много большей массы датчика;
-
опора,lПIерционный элемент и детали, служащие для эакреп­
ления упруго элемента, недемпфируемые;
-
распределенная масса упругого элемента пренебрежимо мала
по сравнеffilЮ с массой инерционного элемента, а их размеры
много меньше длины волны при максимальной частоте измеряе-
47
Пава
2.
ПршщWJ работы JJьезоэлeкmpuч=го =елерОШ!Л1рll
мых виброколебаний; масса инерЦИОlПюго элемента ПРИIШмается
сосредоточенной в его центре;
-
в пределах возможных колебаШlЙ сила упругости пропорци­
ональна деформации упругого элемента;
-
сопротивление, действующее в системе, пропорционально
первой степени скорости смещеlПlЯ инерционного элемента и со­
средоточено в демпфере (для решеlПlЯ частных вопросов можно
вводить допущеIШе об отсутствии сопротивлеlПlЯ);
-
масса инерционного элемента, коэффициенты его упругости
и демпфироваЮIЯ ПОСТОЯlПlы, то есть не изменяются в течеШlе
рассматриваемого времеШl;
-
нулевое эначеIШе для отсчета смещения выбирается в по­
ложении центра массы инерциоlПlОГО элемента при равновесии
(статическая деформация пьезоэлемента под воздействием силы
тяжести не учитывается),
При гармоническом колебательном движении контролируемо­
го объекта с ускорением а на частотах (о, значительно меньших
частоты резонанса системы Фр' можно считать, что акселерометр
также совершает СИНХРОlПlое колебательное движеffilе. Сила Р.
действующая при ускоренном движении на Illiерционный элемент
со стороны пьезоэлемента и вызывающая деформацию последне­
го, согласно второму закону Ньютона F
= т а, а с учетом синусо­
идального характера ускорения F = т а. (s~(i)t). В соответствии
с (1.4), при продольной деформ8ЦЮI ~ь·езоэлемента генерируе­
мы:й в результате прямого пьезоэффекта электрический заряд
(2.9)
При этом, как следует из
(1.5), разность
потеlЩИалов на элект­
родах электрически ненагруженного пьезоэлемента
где СП
48
-
электрическая емкость пьезоэлемента.
2.2.
Физические ОСЩЖN работы пьезоэлектрических акселерометров
При малых потерях, то есть при добротности колебательной
системы более
30,
что характерно для пьезоэлектрических аксе­
лерометров, исходя из
(2,7),
можно считать, что резонансная час­
тота рассматриваемой системы
IE:= ~~'
м
ro=ro=
р
о ~-;;;:
(2.11)
где
kn - коэффициент упругости пьезоэлемента;
S , - площадь пьезоэлемента;
Ё - модуль упругости П:М:;
высота пьезоэлемента,
h: -
Таким образом, мгновенное значение электрического сигнала
(заряда или напряжения) акселерометра пропорционально мгно­
венному значеmпo виброускореlПlЯ на частотах <о «<о при бес­
конечно большом входном сопротивлеюш измерительн~й цепи.
Отношение генерируемого сигнала к действующему ускоре­
нШQ является одной из главных технических характеристик ак­
селерометра
-
коэффициентом преобразоваЮIЯ, из
(2,9)
и
(2.10)
следует, что коэффициент преобразоваlПlЯ по заряду
(2.12)
а коэффициент преобразования по напряженШQ в режиме холос­
того хода (без присоединенного к пьезоэлементу кабеля)
(2.13)
Если массы инерционного элемента и пьезоэлемента соизме­
римы, то есть частично не ВЬПIOJПIЯются условия принятых вьппе
допущений, то при определеlПlИ значеlПlЯ Шlерционной силы не­
обходимо иметь в виду эффективную массу т,фф (рис, 2.3в):
(2.14)
где m п -
масса пьезоэлемента,
49
Пава
2.
ПршщWJ работы JJьезоэлeкmpuч=го =елерОШ!Л1рll
Это объясняется тем, что если на условно выделенный беско­
=
нечно тонкий слой пьезоэлемента, ПРIШегающий к инерциоlПЮМУ
элементу, действует СIШа Р!
тиа, то на такой же слой, ПРIШега­
ющий к основamпo, действует СIШа
F1 =
(т
+т
)а. Иными сло­
вами, деформация пьезоэлемента HepaвHo~epHa n ПО его высоте,
Заряд, генерируемый пьезоэлементом, определяется его усред­
ненной деформацией от воздействия результирующей силы
Р, ~ О,5(Р,
С учетом
(2.14)
и
(2.15),
+ Р,)
~ (О,5m"
выражения
Qn =
+ mJa.
(2.9)-{2.13)
dззтав(sшrot),
(2.15)
примут вид:
(2.16)
ип = dззт,ффав(sШrot)/Сп•
(2.17)
rop~roo=fE=g,
(2.18)
К, = dззт,фф,
(2.19)
(2.20)
в реальной конструкции акселерометра на его резонансную
частоту могут оказывать значительное ВШlЯЮlе контактные жест­
кости межэлементных соединеЮlЙ, что учитывается более слож­
ным механическим аналогом (рис, 2.Зг), Здесь ДОПОЛЮlтельно
введены: контактные жесткости соеДШIeЮlЙ между инерЦИОlПIым
элементом и пьезоэлементом - k ,пьезоэлементом и основанием­
kno' основанием и объектом - k:; м - масса объекта; РО - сила,
действующая на основание акселерометра при ускоренном дви­
жеюш объекта. Кроме того, коэффициенты упругости Шlерцион­
ного элемента, основания и пьезоэлемента могут быть соизмери­
мы, В данных случаях, при анализе работы акселерометра следу­
ет перейти к введенШQ эквивалентных значений массы и коэффи-
50
ц:иента упругости, либо к анализу систе~IЫ со многюш степенями
свободы. ПОС.1едниЙ :'\.-южет дать бo:Iее точные результаты, однако
очень С.10жен и дв..;теко не всегда целесообразен.
Резонансная частота пьеЗОЭ:Jектрического aKce:JepoMeтpa в За­
креШJенном состоянии определяется не только его констр)1lCТИВ­
ными
особенностm.ш:, механическими свойствами материалов
и меЖЭ.Jементных котаъ.'тн:ых соединений, но и зависит от ус­
ловий креплеJШЯ на объеll"Те. В работах
[40, 41]
для нахождения первой резонансной частоты
J.,
показано, что
представляется
возможным переход от сложной системы с расriределенными па­
раметрами к эквивалентной по основной частоте двухмассовой
системе с сосредоточенJIЬThШ параметрам:и.
В этом случае
(2.21)
где
k -
эквивалентная жесткость пьезоэлемента с учетом кон­
~ыx жесткостей соеюrnений с основанием k и инерционным элементом k ;
IЮ
;:~~~~\
m] =
(т
ил
+ т /3) -
приведенная масса основания.
Конта"';ные ~есткости межэлементных соединений в общем
случае зависят от площади контакта, СОСТОЯJШЯ МИkl)О- И
Mall-Po-
неровностей сопрягаемых поверхностей, УСJШИЯ поджатая, меха­
нических свойств клеевого слоя, модулей упругости и коэффици­
ентов Пуассона материалов
[42, 43].
Выражения для контактных жесткостей клеевого
k
и упруго
поджатого k'D соеюmени:й по плоскости имеют ВIIД [40~44]:
k =
юr
'.~o~=
ho
'
(2.22)
51
T7.(lR(l2. Пршщш! работы I1ЫЭОЭ.7.elffi1рl.l.ч,'С;Ш20 aJIL'е7ершu'mР(l
(2.23)
где S~
-
H01ilfha..-lI.ная Th'ОЩадь контакта;
~">' Ч 0 > - коэффициеIПЫ. характеризующие отношения модулей
упругости клея и материалов сопрягае:м:ых элементов;
суммарный максИJ.ffiJIЬНЫЙ зазор;
ho -
Ь l' Ь 2' Ь], Ь4'
h", -
геометрические характеристики шероховатос­
тей сопрягаемых поверхностей;
Е
-
модуль упругости материала;
v о"'- :коэффициент Пуассона;
F - сжимающее усилие.
H~ резонансную частоту акселерометра, есJПf ее значение пре­
вытает несколько десятков кГц, ВЛИЯJше могут оказывать также
значеюlЯ соотношений акустичесJCИХ сопротивлений элементов
конструкции
[45].
Эквивалентные электрическпе схемы акселерометра с источ­
ником заряда или напряжения, включая элементы входной цепи
элеIcrpОННОro измерптельного устройства
рис.
[35, 39],
прпведены на
2.4.
- элект­
R - аъ."Тивное сопротивление
пьезоэлемента; С - электрпческая ;1-fI{ОСТЬ соеДlПfИтельного ка­
Элементы схем имеют следующие обозначения: СО
рическая емкость пьезоэлемента;
беля; Св" и R u- Bx~дныe емкость и сопротпвление измерительного
устройства;
Q,
И - ПСТОЧfШЮf заряда и напряжеюlЯ.
Qrrc:и:.·.Тc.lR"
UliU
РJlС.
а
52
2.4.
-
A:Тc.lR"
~ __ U
Эквивалентные элекrpичеСIO-Iе схемы акселерометра:
с JIСТОЧffi[Ю)М заряда; б
-
с JIСТОЧЮIКQМ напряжеюIЯ
2.2.
Физические ОСЩЖN работы пьезоэлектрических акселерометров
в приведенных схемах не рассматриваются индукгивность
и активное сопротивлеlПlе кабеля, так как при реальных ДЛШIах
последнего их влияние пренебрежимо мало. В большинстве слу­
чаев также можно пренебречь ВJШЯlПlем активного сопротивления
пьезоэлемента, если оно на нижней частоте Ф" рабочего диапа­
зона значительно больше его емкостного сопротивления, то есть
R » l/ф е, При достаточно больших значениях R можно
т;ть, 'IТO ;ье;оэлемент натружен емкостью е = е +" е ,
счи­
в эквивалентной схеме (рис, 2.4а) емкости "е и с поДКлючены
параллельно источнику заряда. Так как паралл~льн~е ПОДКJПOче­
lПIе ДОПОЛlПlтельной емкости не изменяет общего заряда систе­
мы, заряд на нагрузке не зависит от значений е
и е
, Иными
словами, изменение ДЛШlЫ или емкости соедиIПIТ~ЛЬН~ :кабеля
не должно отражаться на значении КОЭффlЩиента преобразова­
ния акселерометра по заряду,
из рассмотрения эквивалентной схемы с источником напряже­
ния (рис,
2.46)
следует, что напряжение на нагрузке
(2.24)
тогда коэффициент преобразования по напряжеlПlЮ при емкост­
ной нагрузке е"
(2.25)
зависит от емкости соедиlПIТельного кабеля, а также от входной
емкости измерительного устройства. Следовательно, при регис­
трации выходного напряжения в случае замены соедшlИтельно­
го :кабеля ИJПI измерительного устройства с другими значениями
собственных емкостей необходимо проводить повторную калиб-
53
Пава
2.
ПршщWJ работы JJьезоэлeкmpuч=го =елерОШ!Л1рll
ровку акселерометра или расчет его нового значения коэффици­
ента преобразования к: по формуле
(2.26)
где Кн' Со5щ - значения коэффициента преобразования по напряже­
нию и общей емкости цепи (c)'!-IМa емкостей акселерометра,
соедиЮlтельного кабеля и входной емкости измерительного
устройства) до замены кзбеля;
С:бщ - общая емкость цепи после замены,
ГЛАВА
3
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ПЬЕЗОЭЛЕКТРИЧЕСКИХ АКСЕЛЕРОМЕТРОВ
ПЬезоэлектрические акселерометры характеризуются более
чем
40
параметрами, служащими для оценки их работоспособ­
ности, точности и применимости для конкретных измерительных
целей
[46].
К числу основных характеристик акселерометров относятся:
коэффициенты преобразования; относительная чувствительность
к ускоренmo. действующему на акселерометр в поперечном на­
правлении; рабочие диапазоны ускорений, частот и температур.
В некоторых случаях необходимы сведения об электрической
емкости акселерометра, резонансных частотах свободного и за­
крепленного акселерометра в продольном и поперечном направ­
лениях, сопротивлении утечки, массе и других параметрах,
На работу акселерометра оказывают влияние внеШlШе фак­
торы, каждый ИЗ которых может стать ПРИЧШlОЙ недостоверной
IПIформации
[47-51], К их числу относятся; поперечные [52,
[54, 55] ускореIПIЯ; деформации объекта в месте
[56, 57]; переменные магнитные [58],
элеIcrpические [59] и акустические [60, 61] поля; токи в контурах
заземления [62]; температура обьепа и окружающей среды [63];
проникающая радиация [64--66], Кроме того, коэффициент пре­
53]
и угловые
крепления акселерометра
образования может зависеть от значеЮIЯ измеряемого ускорения
[59],
а при IПlТенсивных ударах часто наблюдается так называе­
мый дрейф нуля
[67, 68].
Степень ВЛИЯЮIЯ названных факторов и ВОЗЮПffiющие при
этом погрешности ИThIерения характеризуется коэффщиентами
ВШlЯНИЯ соответствующих физических величlПl, которые обяза­
тельно указываются в документации на акселерометр и должны
учитываться при проведении измерений,
55
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
Очень важным показателем работы акселерометра является
стабильность его метрологических харaIcreрИСТИК во времеlПl
и к воздействmo внешlПlХ влияющих факторов
[69],
В экстре­
мальных условиях эксплуатации акселерометров возможны как
необратимые, так и обратимые изменеlШЯ их коэффициентов пре­
образования и других характеристик
[70, 71],
Это, естественно,
накладывает ограничения на условия применения пъезоэлектри­
ческих акселерометров,
МехаlПlЗМЫ влияния наиболее часто встречающихся внешних
воздействий подробно рассмотрены в главе
3.1. Коэффициенты
4,
преобразования
Коэффициент преобразования акселерометра представляется
:как отношеlПlе значения его выходного сигнала к значенmo сину­
соидального ускорения, действующего на установочную поверх­
ность вдоль рабочей оси.
В общем случае, коэффициент преобразования является комп­
лексной величшюй, зависящей от частоты
В подглаве
2.2
[72],
показано, что виду регистрируемого при из­
мерении сипшла (заряда или напряжеlШЯ) соответствуют по­
нятия коэффициентов преобразования по заряду К и напряже-
lПIюКн :
з
(3.1)
(3.2)
где
Qи
значение заряда генерируемого акселерометром, пКл;
- значеlПlе напряжения на выходе акселерометра с огово­
ренной емкостной нагрузкой, мВ;
а
-
ускорение, действующее вдоль рабочей оси акселеромет­
ра, M'C-1 ,
56
3.2. Om1l0сumелh1IЫU 1(J)ЭффUЦШ!llm JJОJlEречllDгО npeoбразовUllUЯ
Обычно
значения
К,
и
К"
указываются
соответственно
в пКл,м-1·с 1 и mE,m-1,с 1 , Иногда в качестве еДШIIЩЫ ускорения ис­
пользуется
g (lg
~
9,807 M·C-1 ).
для удобства измерения и согласования с регистрирующей ап­
паратурой некоторые производитemI вьrnyскают акселерометры
с нормализованными значениями КОЭффlЩиента преобразования
1О ДБ значе­
3,16 или 10, например:
по заряду или напряженшо, При шаге нормирования
ния КОЭффlЩиента преобразования кратны
0,1; 1; 3,16; 10; 31,6 [62],
Кроме того, часто устанавливается до­
пуск на отклонение (нормирование) КОЭффlЩиента преобразова­
ния от номинального значения, В зависимости от типа и назначе­
ния акселерометра он лежит в пределах от
2 до 1О %,
Так как значение КОЭффIЩИента преобразования может изме­
няться с течением времеffil ИJПI в результате внепrnих воздействий,
акселерометр должен проходить периодическую атreстацшо с обя­
зательным КThIepeffileM КОЭффJЩИента преобразования. для пьезо­
электрических акселерометров, работающих в допустимых услови­
ях эксплуатации, межповерочный интервал составляет один год,
3.2. Относительный коэффициент поперечного
преобразованпя
Все акселерометры преобразуют в электрический сигнал не
только ускорение в направлении их рабочей оси, но, в какой-то
степени, и ускорение, действующее в поперечном направлеffilИ.
Это может вызвать дополнительную погрепrnость измерения,
если реальное направлеffilе ускорения не совпадает с направле­
нием рабочей оси акселерометра
[73, 74],
В общем случае, воз­
никновение чувствительности к поперечному ускорению вызвано
несовпадеIШем на некоторый угол ct оси максимальной чувстви­
тельности акселерометра с его рабочей осью (рис,
3.1).
ПО этой
ПРИЧlПlе поперечная чувствительность имеет Рaз.mIчные значения
в разных направлениях установочной поверхности, перпендику­
лярной рабочей оси акселерометра
[62].
57
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
Рабочая ось акселерометрil
______ : ~~~~
Напрэвленияреальной
рабочейчувсrВlщmьноC"m
Направления маl«;имума
ГlOпе~нойчувствюельности
Направпения МИН~lмума
поперечной чувствительности
Рис.
3.1. Векторное предстаRlIение чувствителъностей
акселерометра в рабочем и поперечных направлениях
Если при отсутствии ускорения ВДОЛЬ рабочей оси акселеро­
метра воздействовать на него ускорением с постоянной амплиту­
дой в поперечном направлении под углом в, изменяющимся от О
до
3600, можно построить диаграмму направленности поперечной
3.2), НаправлеlПlЯ максимума и МlПIиму­
чувствительности (рис.
ма поперечной чувствительности взаимно перпендикулярны,
"O
180"
~
~ou
Направления мао:с"ЩМ3
оопармнойчувсmопельности
1ВOU
Рис.
Напр"елени" ",инимyt.I"
попер!!'Н)"чувствительнocrn
3.2. Вид теоретической диаграммы направленности чувстви­
тельности акселерометра к поперечному ускорению
58
3.2. Om1l0сumелh1IЫU 1(J)ЭффUЦШ!llm JJОJlEречllDгО npeoбразовUllUЯ
МШlимальное значение выходного сигнала практически не до­
стигает нулевого значеIПIЯ, что объясняется неполной скомпенси­
рованностью деформаций и генерируемых зарядов
[35].
При пе­
реходе от одного лепестка диаграммы к друго:му фаза выходного
сигнала изменяется на противоположную,
Максимальная чувствительность
акселерометра к действу­
ющему на него в поперечном направлеmш: ускоренmo характери­
зуется относительным коэффициентом поперечного преобразова­
ЮIЯ (ОКПП) Коп' выраженным в процентах;
(3.3)
(3.4)
где Q~ иm= - соответствующие максимальные значения заряда,
пКл, и напряжеIПiЯ, мВ, на выходе акселерометра при воздей­
ствии на него только ускорения в поперечном направлеmш;
К, К
-
коэффициенты преобразоваlПlЯ по заряду, пКл·м-1·с 1 ,
И 'нащ:шжению, mB·m-1·с 1 ;
а о - значеЮIе ускорения, действующего на акселерометр в по­
перечном направлении, M'C-1,
В зависимости от назначения акселерометров и требоваЮIЙ
к погрешности измереlПIЯ, допускаются различные максималь­
ные значеlПlЯ О:КПП
-
до
1-2 %
для эталонных и до
5-7 %,
а иногда и более, для рабочих средств измереIШЯ.
Зависимость О:КПП от частоты в широком диапазоне мало
изучена, Однако полагается, что на частоте поперечного резо­
нанса, обычно лежащей за пределами рабочего диапазона частот
акселерометра, должен иметь место соответствующий максимум
О:КПП, вызванный характерным для резонанса возрастанием де­
формаций элементов преобразователя
[62, 75],
Несовпадение направления оси максимальной чувствитель­
НОСТИ акселерометра с его рабочей осью вызвано рядом факто-
"
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
ров, К ним, в первую очередь, относятся КОНСТРj'Ю'ивные особен­
ности акселерометра, технологические неточности изготовления
и сборки, неоднородность электрофизических свойств пьезоэле­
ментов, а также :качество обработки сопрягаемых поверхностей
деталей, особеюlO пьезоэлементов и прилегающих к IПIм элемен­
тов конструкции
[35, 76J,
Определенный вклад вносят и дефор­
мации пьезоэлемента, которые вызывают изменеIШе направления
его результирующего вектора поляризованности
[77].
Названные и некоторые др}'ПIе фaк.roры, результирующее вли­
ЯIПlе :которых проявляется случайным образом, препятствуют
полной взаимной компенсации зарядов, возникающих при воз­
действии поперечных ускорений,
Самым простым и очевидным является влияние взаимной
непарaJШельности противоположных поверхностей основания,
в результате чего происходит отклонеIШе рабочей оси электро­
механического преобразователя на некоторый угол jЗ перпенди­
кулярного направления к установочной поверхности акселеро­
метра, При этом ВОЗIШкает дополнительная составляющая попе­
речной чувствительности, пропорциональная синусу этого угла,
алгебраически суммирующаяся с собственной поперечной чувс­
твительностью преобразователя в соответствии с ее диаграммой
направлешlOСТИ. Например, при jЗ =
ляющая О:КПП равна
что
при
1 %,
производстве
а при jЗ
0,570 ДОПОЛlПIтельная состав­
= 2,90 - 5 %, Несмотря на то,
акселерометров
предусмотрены
строгие
допуски на паРaJШельность поверхностей деталей, в случае ~тo­
гоэлементной конструкции, суммарный вклад непарaJШeJIЬНОСТИ
сопрягаемых элементов может быть значительным,
К другим технологическим факторам относятся несоосность
выполнеlПlЯ ИJШ расположения элементов преобразователя после
сборки или такие нарушения осевой симметрии, как неточность
изготовления элементов, заусенцы ИJШ сколы, вызывающие ло­
кальные КОIЩентрации мехаIШческих напряжений, поры и :М:ИК­
ротрещины в материалах, наличие непроклеенных участков со­
прягаемых поверхностей, Заметно сказывается качество обработ-
60
3.2. Om1l0сumелh1IЫU 1(J)ЭффUЦШ!llm JJОJlEречllDгО npeoбразовUllUЯ
ки сопрягаемых поверхностей пьезоэлементов и примыкающих
К ним пассивных элементов,
Конструкция электромеханического преобразователя и аксе­
лерометра в целом должны быть такими, что бы при работе ис­
пользовался
преимущественно
только
один
пъезомоДУЛь,
а
за­
рЯДЫ, возникающие при иных внеIШIИХ воздействиях, включая
поперечные ускореlПlЯ, были МlПIимальны и взаимно скомпенси­
рованы, Следует заметить, что электрофизические свойства
IllvI,
особеюю керамики, никогда не бывают абсолютно одинаковыми
в пределах пьезоэлемента. Это обусловлено рядом технологи­
ческих факторов при изготовлении пьезоэлементов, в результате
чего имеют место:
неравномерное распределеШlе ингредиентов состава;
локальные неоднородности плотности, возникающие при
формовке заготовки, а также вызванные зонными различиями
скоростей протекания физико-химических процессов и наличием
градиентов температуры при обжиге;
внутреНШlе мехаШlческие напряжеlПlЯ, вызванные нерав­
номерностью усадки, обусловленной геометрическими особен­
ностт.ш заготовки, а также изменением кристаллической струк­
туры при фазовых переходах и в процессе поляризацШI,
Неоднородность свойств пьезоэлемента препятствует полной
КОАШенсацШl возmшaющих в нем зарядов даже при симметрич­
ных механических напряжениях противоположного знака. При
воздействии на акселерометр поперечного ускорения, деформации
в его пьезоэлементе имеют очень сложный характер, зависящий
не только от конструктивных особенностей и соотношеIillЙ разме­
ров элементов конструкции, но и от значеIillЙ плотностей и моду­
лей упругости материалов всех взаимодействующих элементов,
Некоторые механизмы возникновения поперечной чувстви­
тельности могут быть рассмотрены на примере простейшей
конструкции акселерометра с деформацией растяжения--сжатия.
Его характерными особенностт.ш являются направление вектора
поляризованности пьезоэлемента вдоль рабочей оси и несовпаде-
61
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
lПIе центров масс JПlерционного и пьезоэлек.грического элемен­
roв (рис.
3.3).
При движении основания с поперечным ускорением а и час­
тотой
ro,
много
меньшей
частоты
резонанса
акселерометра
~н~~~ер:ач;а':е;=~::~ ~е~:'~i=е:ЯииС::о:раз~::=
(рис. 3,3а), состоящего из инерционного и пьезоэлектрического
элементов, вызывает деформацmo сдвига последнего (рис,
Составляющие силы F
3,36).
,действующие на разные горизонталь­
ные плоскости пьезоэлем~нта, благодаря его собствеmюй массе,
имеют различные значения, то есть деформации будут отличаться
по высоте пьезоэлемента. Из-за несовпадения центров масс эле­
ментов преобразователя ВОЗlПlкaIQТ также изгибные деформации,
приводящие к непараллельности плоскостейА и В пьезоэлемента.
СмещеlПlЯ lПIерционного элемента в противоположных направ­
лениях при знакопеременном поперечном ускореlПlИ сопровож­
даются дополнительной деформацией растяжения пьезоэлемента
дh на удвоенной частоте действующего поперечного ускорения,
EC~! 1
"'"
а
2
•
3
,
-
4
л
-
•+ -
наПpiНJЛенue рвбочей оси акселерометра;
центры мах ПЫnОЭfleктрического и инврцuоююго
элеменl1Юв соответственно;
о
Рис.
_ центр lЖерцuu прео6разоrюmепя:
3.3. Воздействие поперечного ускорения на акселерометр
1 - инерционный
2 - пьезоэлемент; 3 - осиование; 4 - :контролируемый
с рабочей деформацией растяжения--сжатия:
элемент;
объект
62
3.2. Om1l0сumелh1IЫU 1(J)ЭффUЦШ!llm JJОJlEречllDгО npeoбразовUllUЯ
Так как в реальном акселерометре значения модулей упругос­
ти материалов,
из которых выполнены элементы
конструкции,
соизмеримы, то одновременно с пьезоэлементом деформируются
инерционный элемент и ОСНОВ3Ю1е. Деформация последнего при­
водит к непараллельности Юlжней плоскости А пьезоэлемента
установочной поверхности основания. На характер деформации
пьезоэлемента ДОПОЛЮlтельно влияют микронеровности сопряга­
емых поверхностей элементов, от которых зависит и контактная
жесткость мехаIШЧеских: соеДl-шениЙ.
В результате сложной деформации пьезоэлемента под воздей­
ствием поперечного ускорения происходит отклонеЮlе оси его
эле:rcrpической симметрии от исходного на некоторый угол <р, ЧТО
приводит К наклону результирующего вектора поляризованности
и появлеЮlЮ паразитных сигналов, связанных не только с рабо­
той пьезомодуля dзз • но и с влиянием поперечного и СДВИГQвого
пьезомодулеЙ.
В реальных :конструкциях компрессишПIЫХ
акселерометров
углы отклонения вектора поляризованности и деформации, спо­
собствующие ВОЗЮlкновеЮlЮ сШ'Налов за счет нерабочих пьезо­
модулей, малы, Деформации с частотой
00,
при которых работает
пьезомодуль dзз , симметричны и противоположны по знаку, что
способствует взаимной компенсации большей части возIШIGlЮЩИХ
при этом зарядов, Заряд, ВОЗЮlКillOЩИЙ за счет растяжения пьезо­
элемента в нецентрированной конструкции с частотой
200, не
ком­
пенсируется (плоскости В и С практически параллельны), Таким
образом, в выходном сигнале акселерометра при произвольном на­
правлеЮlИ поперечного ускорения с частотой
вать составляющая с частотой
200, которая
00 может присутство­
в большинстве случаев
значительно меньше основного сигнала с частотой (о.
Анализ акселерометров с различными типами рабочей дефор­
мации показывает, что наибольшие значения О:КПП характерны
для компрессионных акселерометров, а наименьшие
-
для изгиб­
ных, О:КПП акселерометров с деформацией сдвига занимает про­
межуточное положеЮlе
[37, 78],
63
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
На значение ОКПП могут повлиять внепrnие удары в попереч­
ном направлеюш и статические механические напряжеIШЯ, на­
пример, ВОЗlПIкающие в корпусе акселерометра при чрезмерной
затяжке резьбового креШIеIШЯ,
Пути СlПlжеlПlЯ QКПП напрямую связаны как с возможн:ьn.I
устранеlПlем
причин
возникновеlПlЯ
сигналов
при
поперечном
ускорении, так и с обеспечеIШем наиболее полной взаимной ком­
пенсации этих сигналов, Для этого следует использовать раци­
ональную конструкцию акселерометра, максимально высокий
порядок осевой симметрии элементов преобразователя, совме­
щение центров масс инерционного и
пьезоэлектрического
эле­
ментов, добиваться необходимой чистоты обработки сопрягае­
мых поверхностей деталей, точности их изroтoвлеlПlЯ и сборки.
Особое внимание необходимо уделять обеспеченmo однороднос­
ти электрофизически:х свойств по все:му объему пьезоэлементов
и идентичности их характеристик, СIШжению QКПП в акселеро­
метрах компрессионного типа также способствует применение
многослойного пьезоэлемента, в котором происходит статисти­
ческое усреднение отдельных неоднородностей каждого слоя.
Иногда Сffilжение О:КПП достигается путем проведеШIЯ опре­
деленных настроек преобразователя на стадии сборки акселеро­
метра, В конструкциях с упругим поджатием, имеющих два или
более пьезоэлементов, путем их поворота относительно друг дру­
га вокруг продольной оси возможна некоторая взаимокомпенса­
ция паразитных сигналов, вызванных технологическими неточ­
ностями или неоднородностями
[35].
Компенсация может также
осуществляться путем изменения взаимной ориентации центров
тяжести инерционного и пьезоэлектрического элементов
[79].
Интересный, но теХlПlчески труднореализуемый способ компен­
сации заключается в дозированном изменении поляризованности
участков пьезоэлемента путем локального воздействия давлеlПiЯ
ИJШ reмперагуры
64
[80].
3.3. Рабочий дшuщ3QН УС/ШpeNий
3.3. Рабочий диапазон ускорений
Предполагается, что значение выходного сигнала акселеромет­
ра (заряда :или напряжеlШЯ) должно быть прямо пропорциональ­
но значению действующего на него вибрационного :или ударного
ускореlШЯ. ПО ряду прИЧIПI это может с заданной степенью точнос­
ти ВЬШОШlЯТЬся только В определенном диапазоне ускорений
На рис,
3.4
[39],
показана условная амплитудная харакгеристи:ка
(АХ) пьезоэлектрического акселерометра.
Нижняя граница а",m рабочего диапазона ускорений для каж­
дого типа акселерометра является условным параметром, опре­
деляемым минимальным значеЮlем выходного сигнала
Q . или
U",m' которое может быть реально измерено с заданной ~~oc­
тью, Последняя зависит не только от параметров, включая соб­
ственные шумы используемых в каждом :конкретном случае ре­
гистрирующих устройств, но и ОТ уровня помех различного про­
исхождения, неизбежно проявляющихся при измерении предель-
[2Jl
j Qш,"
но малых сигналов.
• Ji:'J
----:---------7А'
(U)
!
___ /
11
:
:
(Umin) / ' :
a~
Ускорение
Qпр
а,м·с-2
РаБОч~lйдиаl1азоН
Рис.
3.4. Зависимость выходного
сигнала
акселерометра от уснорения
Например, широко известной фирмой «Брюль и Къер» (ВЛiеl &
Kjrer,
ДаlШЯ) для большинства акселерометров, не содержащих
65
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
встроенный усиJПIТель, в :качестве минимальных измеряемых
ускорений для широкого диапазона частот
(22-22000
Гц) указы­
ваются такие, при которых выходной сигнал превосходит уровень
шумов в два раза и лежит в пределах
O,0015--Q,004
пкл
[81].
Ес­
тественно, что для реальных условий эксплуатации эти значения
должны быть существенно увеличены.
Верхняя грашща а
рабочего диапазона акселерометра опре­
деляется ускореIШем,7ьппе которого заметно нарушается линей­
ная зависимость выходного сигнала от ускорения, Это вызывает­
ся обратимыми изменениями механических связей между отдель­
ными элементами электромеханического преобразователя или
нелинейными зависимостями их механических или элекrpофизи­
ческих параметров от механического напряжения, приводящими
к искажению сигнала,
Например,
коэффициент
ских акселерометров,
преобразования
исследованных
при амплитуде ударного ускорения
50 %
1()4
пьезоэлектриче­
автором
3·105
работы
[82],
30103_
M'C-1 возрастал на
по сравнению со значением, полученным в диапазоне
м,с-2 ,
. и а считается рабочим диа­
пазоном измеряемых ускорений. "'Дина~ический диапазон акселе­
Диапазон ускорений между а
рометра определяется как отношеIШе значений верхней границы
диапазона измеряе~IЫХ ускоренней к нижней и выражается в де­
цибелах.
Нелинейность АХ В акселерометра определяется как макси­
мальное отклонение ~эффициента преобразования по заряду
или напряженIПQ от его среднего значения во всем диапазоне из­
мерений и выражается в процентах;
б ~ (К;-К·)100
~
где К;
-
К"I'
(3.5)
коэффициент преобразО8аНИЯ при i-OM значении ускоре­
ния, пКл·м-1·с 1 или mB,m-1·с 1 ;
66
'
3.3. Рабочий дшuщ3QН УС/ШpeNий
К'"'"
__
~K;
-
среднее значеЮlе коэффициента преобразова-
IПЩ
n-
число измереЮlЙ.
На нешшейность АХ существенно влияют свойства ПКМ,
:качество обработки сопрягаемых поверхностей элементов конс­
трукции и усилие их поджатия
[59],
БольППlНСТВО пьезоэлектри­
ческих акселерометров, по сравнению с другими типами, харак­
теризуются высокой линейностью АХ,
Воздействие больППlХ механических нагрузок на пьезоэлемент
может привести также и к появлеЮlЮ необратимых изменений,
вызываемых гистерезисом пьезомодуля или частичной деполя­
ризацией пьезоэлемента
[83, 84].
Характерно, что эти изменеlПlЯ
ЗЮvIетно связаны с наличием микронеровностей контактирующих
поверхностей, создающих участки с повьппенной КОIЩентраци­
ей механических напряжений, сильно отличающихся от среднего
значения
[45, 85].
Некоторые производители дополнительно ука-
::~r:~~е;ьm:~:~:~~~:~~ч:=~~:=йх~р~;;=:~
акселерометра ВIШоть до его разрушения.
для больпrnнства типов акселерометров значеIrnе предельно до­
пустимого ударного ускореюiЯ, как правило, в
1,5-3 раза превЫПlает
значение предельно допустимого вибрационного ускорения синусо­
идальных колебaIOIЙ
[39, 81],
эгот факт может быть объяснен зна­
чительно меньшим количеством ЦИЮIOВ нагружения при ударных
испытаниях по сравнеmпo с ви6рацио:нны]"щ вызываюIЦIl1vШ уста­
лостные явления в конструкционных и пьезоэлектрических магери­
влах
[70].
Кроме того, вследствие большой скважности и кратковре­
менной ДJПIТельности ударных m.myльсов по сравнеmпo с полупе­
риодом вибрационного ускорения, уменьшается время воздействия,
в течение которого могут развиваться очarn разрушения
[86],
Обычно, если это не оговорено специальными требованиями,
значения предельно допустимых вибрациOlПlЫХ и ударных уско-
67
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
рений определяются в направлении рабочей оси акселерометра
и могут существенно отличаться от предельных значений для по­
перечного направления,
3.4. Рабочий диапазон частот
как отмечалось в подглаве
2.2,
пьезоэлектрический акселеро­
метр в режиме датчика ускорения работает на частотах, значи­
тельно меньших частоты собственного резонанса ~ в закреплен­
ном состоянии (частоты установочного резонанса), Теоретиче­
ски при отсутствии утечки генерируемого nьезоэлеменТQМ заря­
да, НИЖНЯЯ граница рабочего диапазона частот не должна быть
ограничешюй,
В реальных случаях акселерометр, как правило, подключает­
ся к регистрирующе:му устройству через согласующий усилитель
(СУ), в :качестве которого может использоваться согласующий
усилитель напряжеЮIЯ (СУН) или согласующий зарядовый уси­
литель (СЗу), преобразующий заряд на входе в электрическое
напряжение (особенности работы СУ с пьезоэлектрическими ак­
селерометрами подробно рассмотрены в работах
[5, 62]).
В ре­
зультате конечного входного сопротивления СУ на нижних часто­
тах наблюдается падение выходного напряжеIШЯ акселерометра.
С ростом частоты, по мере приближения к резонансу, выходной
сигнал монотонно возрастает,
На рис,
3.5
приведена характерная АЧХ пьезоэлектрического
акселерометра,
В общем случае :коэффициент преобразования акселерометра
по напряжеlПlЮ на любой частоте IПIже резонансной представля­
ется как
[87]
(З.6)
где K~O) - значение коэффициента преобразования по напряжеmпo
на горизонтальном участке АЧХ;
68
3.4.
Ув. И УВ
-
Рабочий диатщ3QН чаепют
амrшитудно-частотные погреппюсти на низких и высо­
ких частотах соответствешю,
дБ
"
~
j
Рабочий диапазон
Рис.
3.5. Зависm.юстъ выходного
напряжения акселерометра от частоты
Нижняя
f.
и верхняя
f.
граничные частоты рабочего диапазона
акселерометРа обусловл~ны допустим:ьn.ш: значениями амплитуд­
но-частотных погреппюстей УН и У в ' которые вызываются различ­
ными причинами
[88, 89]
И, следовательно, определяются неза­
висимо.
Причина появления погреппюсти У IJ. В IШЗкочастотной области
обусловлена шунтирующим действием ак.гивноЙ составляющей
R входного сопротивлеIШЯ СУН. для
ющих 20 %, имеет место выражение
значеlПlЙ у
,
не превыша-
IJ.
(3.7)
где СО = Сп
+ СК
-
емкость акселерометра со штатным кабелем;
;~~:O::o=H::o~c::~:~к:::eo~~~c~~~::~Meтpy,
из (3.7) следует, что нижняя грашща рабочего диапазона частот
при измереlПlИ напряжения определяется СУ1-Iмарной емкостью
в цеШl акселерометра и значением активного входного сопротив-
69
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
ления подключенного устройства
[90, 91].
При измерении заряда
ro.mлитyдно-частотная погрешность на IПIзких частотах связана
с параметрами используемого СЗУ.
Погрешность у в В высокочастотной области вызвана продоль­
ным резонансом мехаlПlческой системы акселерометра и без уче­
та де~шфироваIПIЯ составляет
1
(3.8)
у, "1-(f/!,)"
Следовательно, при заданной погрешности верxшrn граlПlца ра­
бочего диапазона частот определяется резонансной частотой за­
крепленного акселерометра
[92, 93].
Неравномерность АЧХ у выражается в процентах или децибе­
лах и определяется :как модуль максимального отклонения коэф­
фициента преобразования в рабочем диапазоне частот от номи­
нального значения, измеренного на базовой частоте
наиболее часто выбирается из диапазона от
Ir,.
которая
20 до 1000 Гц,
Неравномерность АЧХ в процентах может быть найдена из
формул:
где
Q.. ,
и",
-
y
JU. -UI.l00
y
JQ.Q-QI.l00 ,
U
'
(3.9)
(3.10)
максимальные ИШI мшшмальные значения заряда
и напряжения соответственно;
Q,
и
- значеIШЯ заряда и напряжеIШЯ соответственно, изме­
ренные на базовой частоте при одинаковом ускорении,
На практике
частоте менее
[9,42]
для обеспечения погрешности на верхней
5-1 О % ограничиваются соответствеюю
1. s (0,2-Q,3)f,.
70
(3.11)
3.4.
Рабочий диатщ3QН чаепют
При использовании СУН, еCШI собmoдается неравенство
fЛ(С"
+ С,) 22,
(3.12)
погрешность на нижней частоте, независимо от конструкции ак­
селерометра, будет пренебрежимо мала (около
1 %),
Необходимые параметры электрической цепи акселерометра
f-
можно также определить из графика (рис, 3.6) [94], где
часто­
та, Гц; RH - входное сопротивление СУН, Ом; С = СО +Сд - общая
емкость, включая емкость входа СУН, Ф,
дБ
1,0
О
0,9
0,8
0,7
0,6
-5
6
0,5
0,4
0,3
0,2
0,1
fR"C
0,01 0,02
Рис.
0,05 0,1
0,2
0,5
1,0 2,0
3.6. Относительное изменение напряжения
на входе усилителя в зависимости от параметров
электрической цепи
На частотах ниже частоты установочного резонанса коэффи­
циент преобразования К может быть теоретически представлен
в виде произведения двУх функций от частоты (рис, 3,7), одна
из которых (КН) отражает свойства акселерометра в режиме хо­
лостого хода (рис, 3,7а), а другая (Кн,z)
(рис,
-
свойства внешней цепи
3.76) [95]:
(3.13)
71
Рис_
3_7,
ЗiJIНIСНМОI.:'I'h коэффШJ;Иепта преобразоваппя
110
IlaupяжеНШQ ОТ частоты
На частотах, сравнимых с резонансной, но еще достаточно
УЛ:;UIСI1ГlЫ)( от нее
(ro< ro p /3) , можно
считать, что
(3.14)
а па IШ]КИХ частотах (ш
«
Ш р ) функция к"-, l(W) пра1..'ПfЧески по­
LТОЯl1Гlil И ПОRС;IС1Jие К,,(ro) опреде:rяется ВТОРЫ\f из СО~lНожите­
_"[ей, ТО ecТl, 'j,ШИСИТ от паРЮ,fетров внешней цетl и е~IКОСПI пье­
"ЮJ;rС,\lспта.
На 'raCToтax
(3.15)
ф"}'1П\f\ИЯ"
(3.16)
прпБШlжастся" J!ОСТОЯШIO~f)' значению, ТО есть К
(ro) ведет
себя
ТЩ' же, ЮiК К". \(0)), и заRИСИТ только от параметров ;кселерометра.
3.4.
Рабочий диатщ3QН чаепют
Следовательно, если ВЬПIOJПIЯется неравенство
1
.J'iR,,(C, +С,)
<о,
(3.17)
«з'
полученное подстановкой в (3,15) вместо ro значеlПlЯ 00/3, то фун­
кция к (00) имеет участок, 6mIзкий к горизонтальному, с наимень­
шим н~клоном в окрестности точки, названной авторами точкой
перегиба (рис.
3,76).
Частота точки перегиба f"Ч' интересна тем, что, :какой бы от­
носительной погрешностью не задаваться, наиболее пшро:кий ра­
бочий диапазон частот, соответствующий заданной погрешности,
должен включать в себя эту точку. Уравнение для частоты точ­
ки перегиба может быть получено приравIШванием нулю второй
производной ОТ К
(ro), а результаты его численного решения для
различных значе~й R СО + Сд и~ представлены на номограмме
H,
(рис.
3.8) [95].
~
J
l~.~f.'"'
2
1
,>
'"
0.1'0'
2.,045-1&
]0' 2-101 0,02 0,050,] 0,2
0,5
j·l0·]o'Ho-'s·]0I
/,,,,,,,
кГц
Со+С.. nФ
Рис.
3.8. Зависимость частоты точки
перегиба АЧХ
КОЭффJЩиеIПа преобразования по напряжеюпо
от параметров акселерометра и внешней цепи
73
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
Видно, что точка перегиба смещается в область низких частот,
:когда увеличивается произведение
RJCo + Сд )'
и наоборот, сме­
щается в область высоких частот при возрастании1;"
Определяя :коэффициент преобразования по напряженШQ на
не:которой частоте
ro l'
можно найти диапазон частот, в пределах
:которого относительное изменение коэффициента преобразования не превышает задаlПlОГО значения У, то есть
(3.18)
На рис,
3.9 [95]
в качестве примера приведена HOMOгpm.I­
ма для определения граЮlЧНЫХ частот диапазона при У
и~=5%.
н
=
-5 %
~
J;:
Я.
:
С6+С. f,'j,'
0,5
5·10'104 2·1о'5·1&'
[,кГц
Со+С.,пФ
Рис.
3.9. Номограм:ма ДJIЯ определения рабочего диапазона
5%
частот акселерометра при Нeшlнейности АЧХ
74
3.5. Рабочий диапазон mе,lInеpштryp
Приведенные сведеIШЯ о характере АЧХ КОЭффlЩиента преоб­
разования акселерометра справедливы также для иных пьезоэлек­
трических датчиков генераторного типа (давления, силы и др.),
3.5. Рабочий диапазон температур
Рабочий диапазон температур акселерометра ограничен теМ­
пературaшl, в пределах которых не происходит необратимых
изменеffilЙ его характеристик и потери работоспособности при
установленном сроке эксплуатации.
Температура окружающей среды непосредственно сказывает­
ся на значениях коэффициентов преобразования акселерометра,
вызывая дополнительную температурную погрешность
измере­
ЮlЙ. В общем случае, в пределах рабочего диапазона температур,
это связано с обратимыми температурн::ы1УIИ изменения:ми пара­
метров П:М: и ДОПОЛffilТельным влиянием элементов конструкции
акселерометра на условия работы пьезоэлемента (более подроб­
но ВЛИЯЮlе температуры на работу акселерометра рассмотрено
в подглаве
4.4),
Температурное изменеffilе коэффициента преобразования ука­
зывается для всего диапазона рабочих температур ИШI для его
подциапазонов.
Если зависимость коэффициента преобразования от темпера­
туры близка к линейной, то коэффициент ВЛИЯЮIЯ температуры
(КВТ) КТ в %/"С определяется по формулам:
к = Q; -Q. ·100
'.'
(t,-Т.jQ.
(3.19)
'
к = И; -и.. 100
•. ' (Т;-Т.Щ
,
где
Q;,
~
- i-oe
(3.20)
значение выходного заряда и напряжения, соот­
ветствующее i-мy значенШQ температуры Т;;
75
Пава
QIl'
Иll
3.
-
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
значение ВЫХОДНОГО заряда и напряжения при нор­
мальной температуре Т
,
Если зависимость нел~ейная, то определяют IПIЖНИЙ О К
И верХIПlЙ ОВК пределы допустимых изменеlПlЙ коэффщие~а
преобразования, которые могут быть выражены в процентах:
S к = Q.,. -Q. ·100
.,
Q~.
'
(3.21)
SK =Q··,-Q'.100
(3.22)
.,
Q-
'
S к = И.,. -и.. 100
""
и. т
(3.23)
'
SK =И. ш -И·. 100
.•
где
и_
'
(3.24)
Q . , и . - МИlПIмальное значение заряда и напряжения на вы­
x~дe ~~елерометра, соответствующее одному из значений ра­
бочего диапазона температур;
Q ,и - максимальное значеlПlе заряда и напряжения на
в.:;'оде ~селерометра. соответствующее одному из значений
рабочего диапазонатемператур,
Если ПРИlПIмать во внимание только тe~тepaтypныe изменения
парro.lетров
Illv1,
то из
(2.12)
следует, что температурное измене­
lПIе коэффициента преобразования по заряду К (1) соответствует
температурно:му изменеlПlЮ рабочего пьезомодУля di1), то есть
Ы<, _ дdij
К:-Ту'
где М, = К,(Т,)
М,
Т!'
76
- ЩТ,);
= d,(T,) - d,(T,);
T1 -
начальная и конечная температуры диапазона.
(3.25)
3.5. Рабочий диапазон mе,lInеpштryp
Как следует из
(2.24),
температурное изменеIШе коэффициен­
та преобразования по напряжеIШЮ КJТ) определяется не только
температурными
зависимостями пьезомодуля
и
емкости пьезо­
элемента СJТ), но и значением емкостной нагрузки С,,:
к (Т)- К,(Т)
•
- С.(Т)+С:
(3.26)
что позволяет определить условия минимального изменеIШЯ коэф­
ФlЩИента преобразОВaIШЯ в заданном интервале температур
[86],
Так как температурные зависимости пьезомодуля и диэлектри­
ческой пронщаемости различны, то температурные зависимости
коэффициентов преобразоваlПlЯ по заряду и напряжеlШЮ одного
и того же акселерометра имеют разный характер, При этом тем­
пературное изменение коэффициента преобразования по напря­
женШQ зависит от е:мкостной нагрузки и может существенно от­
личаться от режима холостого хода (рис,
(КI1•m"" -
K".min) /К" , 0/0
20
-
3.10, 3.11) [86].
J...-- ~
16
v-
12
V
1---
2
\/ v
з
\,/,1/'"
4
10
Рис.
12
3.10. Зависимости полного теhШературного
изменения коэффициента npеобразования по напряжению
от О"ПIOспrелъного значения емкостной нarpузки:
1-0Т
3-от
25 до 280 ОС; 2 -от 25 до 220 ОС;
25 до 140 ОС; 4-от 25 до 100 ос
77
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
в качестве примера (рис.
показаны зависимости полно­
3.10)
го температурного изменения коэффициента преобразования по
напряженmo от отношения общей емкостной нагрузки к емкости
пьезоэлемента из ЦТС-83Г, измеренной при
25
ос для различных
диапазонов температуры,
M.lKH, %
MJK" %
2о
,
,
2
V
,
~
,
' "'7
,
5
~
~ ~
О
,
I ",;
,
Т, ~C
Рис.
3.11. Те],шературные зависимости
коэффшщеIПOВ преобразоваЮIЯ по напряжению
при разШIЧНЫХ относительных значениях
емкостной нarpузки
(1--6) и заряду (7)
1 - С" = О;
ДJIЯ пьезоэлемента из ЦТС-8ЗГ:
2-С ~02C'3-C ~05C'4-C
" 5 -'с. '!, со; 6"- c"'~
~057C'
3"С.; 7 -М/К,'
.'
Полное относительное изменение коэффициента преобразо­
вания по напряжеlПlЮ может быть уменьшено до МИIПlмально­
го значения (рис,
3.11)
при оптимальной нагрузочной емкости
для заданного диапазона изменения температуры от Т! дО
T1
при
условии, если имеет место неравенство
(3.27)
78
3.5. Рабочий диапазон mе,lInеpштryp
где Вт(Еу)'
относительные изменеЮIЯ диэлектрической
BT(dij) -
проmщаемости и рабочего пьезо],юдуля в заданном температурном диапазоне,
Полагая критерием этого МИlПIмального значеIПIЯ условие
KJTJ) =
К,,(Т) и ПРИlПIмая во ВlПIмание формулу
(3.26),
можно
найти оптимальную нагрузочную емкость
с
К,(Т,)С"(Т,) - К,(Т,)С"(Т,)
,~
(3.28)
К,(Т,)-К,(Т,)
Оптимальное значение относительной емкостной нагрузки
С",ош
К,(Т,)-К,(Т,)С"(Т,)/С"(Т,)
С" (Т,)
К,(Т,)-К,(Т,)
(3.29)
Если допomштельное ВЛИЯlПlе элементов конструкции акселе­
рометра на температурную стаБIШЬНОСТЬ коэффициента преобра­
зования не велико, то есть К,(Т)
- din,
из
(3,29)
следует
С",ош z 0,(&,) -1,
С" (Т)
(330)
о,(а,)
в иных случаях, вызванных конструктивными особенностями
акселерометра, когда температурная зависимость коэффщиента
преобразования по напряжеlШЮ значительно отличается от зави­
симостей пьезоконстант, требуется ШlДивидуальный подбор на­
грузочной емкости,
из характера температурного изменеЮIЯ пьезомодуля и ди­
электрической проницаемости ~пюrnx IIКМ (например, ЦТС-21,
ЦТС-26, ЦТС-20/80, ЦТС-83) следует, что для достижения мак­
симальной температурной стаБIШЬНОСТИ акселерометров с пье­
зоэлементами :из
названных материалов в
широком
диапазоне
Te:мnepaтyp необходимо регистрировать выходной сигнал по
напряжению при емкостной нагрузке, ОIП1ll\ПIЗИРОВанной для
79
Пава
3.
Основные харахтерцсmикu nьезоэлекmpuЧECКtIX акеелера'М!fllров
конкретного кпм и задаmюго диапазона те:t\iшератур, для ЭТОЙ
же цели при использовании ПМ, у которых пьезомодуль изменя­
ется значительно меньше, чем диэлектрическая проницаемость
(например, ЦТС-Б, ТВ-2, ниобат ШIТИЯ, кварц), целесообразно
применение СЗУ
[86, 96].
ГЛАВА
4
ВНЕШНИЕ фАкторы, ВЛИЯЮЩНЕ НА РАБОТУ
ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА
4.1.
Классификация внешних влияющих факторов
При измереffilИ вибраций на силовых и энерговырабатыва~
ющих установках, двигателях, некоторых видах технологическо­
го оборудования и подобных устройствах на акселерометр может
воздействовать совокупность различных возмущений, возника­
ющих при работе контролируемого объе:rcrа или вносимых дру­
ГИМИ источниками. Такие возмущения, называемые внепrnими
влияющmш факторами, способны сказаться на работе акселеро­
метра и не только вызвать искажеЮlе его выходного сигнала, но
и привести к потере работоспособности.
ПО виду воздействия различаются следующие основные груп­
пы влияющих факторов: механические, температурные, элект­
ромагlПlтные, а также обусловлеIПIые ШlЫМИ специфическими
свойствами окружающей среды, Важны не только максимальные
значеlШЯ воздействующих величин, но также продолжительность
и место их воздействия. Влияющие факторы определяют такие
основные характеристики акселерометра, как мехаffilческая на­
дежность
-
способность в течение всего срока службы выдер­
живать без разрушения весь :кш,шлекс действующих влияющих
факторов и метрологическая надежность
-
способность изме­
рять полезную Шlформацию в ЭТИХ условиях с погрешностью,
не превьппающей допустимую, Вид погрешности акселерометра
от каждого внеIШIего воздействия определяется еще и его часто­
тным спектром, Все факторы с частотным спектром, попадающие
в рабочую полосу частот акселерометра или выше, могут быть
отнесены :к быстрым влияющим факторам. Факторы с частотным
спектром,
не удовлетворяющие этому условию,
можно считать
81
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
медленlIЬThПI, Условие независимости действий влияющих факто­
ров соблюдается до тех пор, пока действие каждого из них не вли­
яет на выходной сигнал, Наибольшее ВJПIЯЮlе на механическую
надежность акселерометра оказывает КОМIШексное воздействие
мехamrчески:х и теIШовых влияющих факторов
[71].
УпрощеШIaЯ схема классификации наиболее часто встреча­
ющихся внешЮIX влияющих факторов приведена на рис,
4,1,
Деформац,,"объе<та
Рис.
82
4.1. Классификация внешних вшrnющих факторов
4.1.
Классuфюшцuя внеШ/llil IUШНЮЩUX факторов
к внепrnим механическим воздействиям на акселерометр OT~
носятся;
-
деформации, ВОЗlПlкающие в контролируемом объекте в мес-
те крепления акселерометра;
-
акустические поля в зоне расположения акселерометра;
статическое и изменяющееся давления окружающей среды;
неИThIеряемые вибрации, в том числе компоненты вибро-
ускорения, направление которых не совпадает с рабочей осью ак­
селерометра, ротационные колебания и вибрации вне диапазона
измеряемых частот;
-
интенсивные вибрации и удары, продолжительное или мно­
гократное воздействие которых может влиять на работу акселе­
рометра,
ТеhШераrypные воздействия обусловлены медленно изменяю­
щимися или установившимися как высо:кm.m, так и IШЗкmш тем­
пературaшt:, действующими на акселерометр, а также скачками или
колебaниm..m те]"шературы объекта или окружающей среды.
К электромагнитн:ьn..I воздействиям, влияющим на работу аксе­
лерометра, следует отнести переменные магнитные и электриче­
ские поля, электромагlПlтные поля высокой частоты радиодиапа­
зона и переменные токи, возникающие в контурах при заземле~
lПIи измерительной цепи в нескольких точках,
Говоря о ВЛИЯIПIИ гидрохимических факторов, в первую очередь
подраз)'],,'Iевают такие свойства окружающей среды, как повышен­
ная влажность и наличие агрессивных химических веществ.
Проникающая радиация
-
потоки гамма-излучения и нейтро­
нов, обладающие большой проникающей способностью и при
определеmюй интенсивности способные :влиятъ на работу аксе­
лерометра, в отличие от альфа- и бета-частиц, задерживающи:хся
корпусом и оболочкой кабеля.
Вносимые внешlПIМИ ВJПIЯющими факторами искажения вы­
ходного сигнала акселерометра обусловлены прямым или кос­
венным воздействием на электромехаlПlческий преобразователь,
соеДИlПIтельный кабель, систему крепления, а JПюгда и на кон8з
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
тролируемый объект, например когда в нем вызыаны ДОПOJПlи­
телъно наведенные колебания от внеIШIИХ, иногда постороmrn:x,
источников звука.
Несмотря на то что пьезоэлектрические акселерометры, по
сравнеmпo с другш..ш ТИШThШ датчиков, наиболее устойчивы к экс­
плуатационным вщдействиям, при выборе ИJШ проектироваmш
акселерометра необходимо оцеЮlБаТЬ условия его эксплуатации,
а также возможную степень ВЛИЯIШЯ внешIШX факторов на метро­
логические характеристики и суммарную погреIШIОСТЬ измерения.
4.2. Влияние механических факторов
4.2.1.
Влuяние дефор.wацuЙ коnтролuруе.мого объекта
Во время работы контролируемого объекта, прежде всего при
изгибных И резонансных колебаЮlЯХ конструкции или ее отде­
льных частей, lПюгда возникают значительные механические н3-
пряжеЮIЯ и СВЯЗaIПlые с ними деформации, Такие деформации,
особеюю в месте расположеЮIЯ акселерометра, передаются его
основанию и могут достигать пьезоэлектрического преобразова­
теля (рис,
4.2).
При определеlПlЫХ условиях ОЮl способны ока­
зать влияние на работу акселерометра и систе~IY его креплеЮlЯ,
.~:
Ф~
.Н.
~~Ф
4
б
Рис.
4.2. Характер деформации элемеlПOВ
:компрессионного акселерометра при деформациях
растяжения (а) и сжапrn
объекта:
384
1-
(6)
контролируемого
инерционный элемент;
основание;
4-
2-
пьезоэлемент;
контролируемый объект
4.2.
ВЛWlНuе меиmuчetЖux фаюnоров
ПО характеру воздействия различаются статические, медленно
меняющиеся (с частотой, много меньшей IШжней граmщы рабо­
чего диапазона акселерометра) и быстро меняющиеся (частота
которых входит в рабочий диапазон) деформации. Так, любая де­
формация, при достижении определешюго критического значе­
ния, может привести к разрушенlПO клеевого крепления акселеро­
метра, а быстро меняющиеся деформации - к ослаблеmпo усилия
поджатия резьбового крепления. Воздействие на преобразователь
акселерометра статических и медленно меняющихся деформа­
ций создает в нем дополнительные деформации, в той или иной
степени
сказывающиеся
на
метрологических
характеристиках
акселерометра, Быстро меняющиеся деформации, передающиеся
пьезоэлементу. вызывают появление паразитных сигналов, часто­
ты которых совпадают с частотами измеряемых виброускорениЙ.
Особенно это заметно в области низких частот, где присутствуют
значительные деформации, создаваемые изгибными колебаниями.
Наибольшую чувствительность к деформации основания имеют
компрессионные акселерометры, в которых при деформации пье­
зоэлеменТQВ не происходит взаимной компенсации паразитных
сигналов
[62],
В простых конструкциях таких акселерометров
паразитный сигнал от деформации основания преимуществен­
но определяется нерабочим пьезомодулем dл и lПюгда может
превышать полезный сигнал на один-два порядка, Несмотря на
сложность механизма передачи деформации от объекта к пьезо­
элементу, на основашш имеющихся экспериментальных данных
считается, что чувствительность акселерометра к деформации
снижается с уменьшением отношеlШЙ поперечного размера ос­
нования к его высоте и модулей упругости материалов объекта
и основания. СlШЖению деформациоlПЮЙ чувствительности так­
же способствуют увеличение толщины клеевой прослой:ки при
клеевом креплеЮlИ акселерометра, использоваЮlе
промежуточ­
ных прокладок с малым модулем упругости между основаЮlем
и объектом ИШI пьезоэлементом, Установлено, что с увеличеЮlем
момента затяжки при резьбовом креплеЮlИ, чувствительность
85
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
к деформации одного и того же акселерометра сильно возрастает,
а затем стабилизируется,
Формы
экспериментально
полученных
диаграмм
направ­
ленности деформационной чувствительности часто отличны от
круга и зависят от ряда констрyкrивных особешюстей акселеро­
метров, причем значения по осям максимума и МИlш:мума могут
отличаться в несколько раз (рис.
4,3).
Положения макси:мумов
и мии:и:мумов связано со сменой фазы сигнала от деформации при
изменеmrn направления действия механического напряжения.
Поэтому суммирование сигналов от деформации и измеряемого
ускорения происходит неоднозначно, и введеи:ие поправки прак­
тически невозможно
Рис.
[56],
4.3. ЭксперимеIПалъно полученные
диаграммы направленноCПI деформационной
чувствительности трех различных
конструкций акселерометров
Чувствительность акселерометра к воздействию деформации
со стороны контролируемого объеIcrа характеризуется коэффи­
циентом влияния деформации основания (КВДО), выраженным
в м·с-I,мю.г1,м, КВДО определяется по формулам:
K.~+-,
,К,
(4.1)
(4.2)
86
4.2.
где
Q,
ВЛWlНuе меиmuчetЖux фаюnоров
- максимальные значеIПIЯ заряда (пКл)
и
и напряжения
(мВ) на выходе акселерометра при воздействии деформации
на его основаЮlе;
€. - относительная деформация объекта (мкм·м- I );
-
К, к
коэффициенты преобразования акселерометра по за­
р.Ццу "(пКл.М-1.С 1 ) и напряжеffilЮ (MB'l\ГI'Cl),
Численное значение КЕДО соответствует ускорению, при ко­
тором бы возникал сигнал, равный сигналу акселерометра, вы­
званно:му едиIШЧНЫМ значеffilем деформации его установочной
поверхности.
Иногда используется нормируемое по предельному измеря­
емому ускоренmo значение КЕДО, выраженное в %/(мкм·],г l ),
определяемое по формулам:
K'~~KQ ·100,
Е
u
К.= Е"Кпа,""" ·100,
где аmiП
-
(4.3)
за,"""
(4.4)
предельное значеlПlе диапазона измеряемых ускорений,
M·C-1 •
Аналогичным образом представляются коэффициенты влия­
ния других воздействий, рассмотренные ниже.
Более точная оценка влияния деформации объекта на погреш­
ность измерения ускореlПlЯ может быть получена с использова­
lПIем тензора деформациоlПЮЙ чувствительности, описывающего
все ко],.шоненты деформации в месте закреплеЮIЯ акселерометра,
включая как тангенциальные, так и нормальную составляющую
к поверхности. Последняя вносит вклад в вибрацию и присутс­
твует в общем сигнале акселерометра
[97].
Значение КЕДО внекоторой степеЮl связано с типом рабочей
деформации преобразователя. Акселерометры с рабочими дефор­
мациями сдвига и изгиба имеют значительно меньшую чувстви­
тельность к деформации по сравнеЮlЮ с компрессионными.
87
Пава
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
4.
Для СlПlжения влияния деформации обье:rcrа используется ряд
способов (рис.
4.4).
К ним, еCШI сравнивать с базовой схемой ак­
селерометра (рис, 4.4а), относятся:
(рис.
-
креШIеlПlе
акселерометра
через
переходной
элемент
4.46);
использоваlПlе прокладок с
невысоким модулем упругости
между основаlПlем и обьеIcrOМ или пьезоэлементом (рис, 4.4в);
lПIе
УВemIчение высоты основания (рис, 4.4г) или УВemIче­
отношения высоты основания
(рис. 4.4д)
к
его
поперечному размеру
[63, 98].
Для этой же цели возможно выполнение основания особой
конфигурации. При:мером является предложеююе фирмой (ЭН­
девкт)
(Endevco Corporation, США) основание переменного сече­
(Isobase)) (рис, 4.4е), эффективно СlПIЖающее деформа­
[99, 100],
ния типа
ционную чувствительность
,
~
Рис.
4
з
,
2
."t>.
1
4.4. Варианты выполнения КОhШpессионного акселерометра
с целью снижеЮIЯ деформационной чувствительности:
1488
основание;
2-
пьезоэлеменr;
кръшrкa корпуса;
5-
3-
:инерционный элеменr;
переходной элемент;
6-
npокладка
4.2.
ВЛWlНuе меиmuчetЖux фаюnоров
Меры, предпринимаемые для снижения деформациоlПЮЙ чув­
ствительности. могут приводить К ухудшению других характерис­
тик акселерометра, прежде всего к увеличению размеров и мас­
сы, Сffilжению частот установочного и поперечного резонансов,
При проектировании конструкции или монтаже акселерометра на
объе:rcre следует руководствоваться разумными компромиссными
решениями, исходя из конкретных условий измереffilЙ.
4.2.2. Влияние давления и акустического поля
ДавлеIШе окружающей среды, воздействуя на корпус акселеро­
метр, а вызывает его деформации, которые, аналогично деформа­
циям объе:rcrа, передаются электромеханическому преобразовате­
лю, Это может приводить к заметным изменениям метрологиче­
ских харак.геристик акселерометра и появлению СIП'НaJIОВ помехи.
Наибольшее влияние наблюдается при кратковременных перепа­
дах давления, вызывающих, кроме деформации корпуса, иногда
и деформацию объекта, которая может отразиться на работе
акселерометра, приводя к наложению на выходной сигнал им­
пульсов затухающих колебаний. Экспериментальная провер:ка
показала
[56],
что перепады давления, воздействуя на антивиб­
рационный или на обычный герметичный :кабель, не приводят
к появлению значительных сигналов. для защиты от перепадов
давления следует стремиться к повышению жесткости корпуса
акселерометра, Эффективный результат дает применение герме­
тичной оболочки, закрывающей акселерометр на объекте,
Напротив, многократное возрастание выходного сигнала от
перепада давления может быть вызвано нерациональной с точки
зрения защиты от рассматриваемого воздействия схемой постро­
ения акселерометра. Примером являются акселерометры, у кото­
рых упругое поджатие элементов преобразователя осуществляется
пружиной, опертой на крьшrкy, или имеются иные нежелательные
меxamrческие связи преобразователя с корпусом, способствующие
передаче его деформаций пьезоэлементу
[62],
В связи с этим це-
89
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
лесообразно стремиться к максимальному увеличеmпo пути рас­
пространеШIЯ деформаций между местами соединения основaJШЯ
с КРЬШIКOй корпуса и пьезоэлементом (рис. 4.4д, 4.4е).
Измерение параметров виброколебаний часто осуществляется
в присутствии акустического шума
[61].
Причинами ВОЗЮIКНове­
IПIЯ акустических полей могут быть как механические колебания
самого контролируемого объекта, так и другие ИСТОЧЮlки звука,
относящиеся к объекту или имеющие ПОСТОРОlПlее происхожде­
lПIе. Характерно, что в подавляющем БОЛЬППlнстве случаев час­
тоты, присутствующие в спектре акустических колебаний, попа­
дают в рабочий диапазон частот акселерометра или совпадают
с резонансными частотами элементов его конструкции. В послед­
нем
случае механические
напряжеffiIЯ
многократно
возрастают
и могут привести к появлеlШЮ значительного сипшла помехи.
Способы снижения влияния акустических полей те же, что
и для перепадов давлеmrя, так как эти воздействующие факторы
имеют общую физичесh.""j'Ю пр:ироду по характеру и мехаlПl3МУ
проявлеlШЯ. Учитывая широкий спектр акустических колебаmIЙ,
ДОПОЛlПlтeJIЬно можно рекомендовать устранеlПlе возбуждаемых
ими резонансных колебаний элементов корпуса акселерометра
в рабочем диапазоне частот путем де:мпфироваЮIЯ или переноса
за его границы.
Коэффициент влияния акустического поля (КВАП), выражен­
ный в m·c-2/дБ, определяют по формулам:
K~L
,
РК,'
(4.5)
(4.6)
где
Q,
и
- максимальные значеlПlЯ заряда (пКл) и напряжеющ
(мВ) на выходе акселерометра при воздействии на него акус­
тического поля;
90
4.2.
Р
-
ВЛWlНuе меиmuчetЖux фаюnоров
уровень звукового давлеющ дБ;
К, К
коэффициенты преобразования акселерометра по заря­
-
дУ. пkл·м-I·с 1 , и напряжеЮlЮ, mB·m-I·с 1 ,
При использовании нормируемого по пределъно:му измеряемо­
му ускорению значение КВАП, выраженному в %/ДБ. его опреде­
ляют по формулам;
К, = ркИ
·100,
(4.7)
К, = PKQ,0_ ·100.
(4.8)
"а_
Уровень звукового давления может быть выражен также в пас­
калях;
(4.9)
где Рп' Рд
-
давление в паскалях и децибелах соответственно.
4.2.3. Влияние неиз.,иеряе.чых вибраций
Измерение вибрационного или ударного ускорения произво­
дится в заданных частотном и динамическом диапазонах, которым
должны соответствовать аналогичные харакгеристи:ки акселеро­
метра. В реальных условиях в спектре колебаЮlЙ контролируемо­
го объекта часто присутствуют вибрации на частотах, выходящих
за пределы диапазона измереЮlЙ, причем, особенно на высоких
частотах. ускорения могут быть значительными, Так как аксе­
лерометр принимает и преобразует колебания в широком спек­
тре частот, послеДЮlе обязательно присутствуют в его выходном
сигнале и при определенных условиях могут вызвать перегрузку
СУ или регистрирующего устройства. Особенно это опасно, ког-
91
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
да частоты колебаIШЙ или их гармоники совпадают с частотами
резонанса акселерометра или его отдельных элементов, В этом
случае пьезоэлементом будут вырабатываться БОЛЬППlе эле:rcrpи­
ческие сигналы даже при малом уровне вибрации объекта
[101],
Резонансные колебания на IШЗКИХ частотах могут возникать при
нарушеlПlИ
системы крепления датчика или
использовании не­
рациональной конструкции переходного :крепежного элемента
[102].
ПРИ измереlПlИ IШЗКOчастOПIЫX ускореIШЙ в присутствШf значи­
тельных высокочастотных вибраций могут использоваться меxaIOl­
ческие фильтры, устанавливаемые между объектом и акселеромет­
ром. ОIПl вьшолняют функцию фильтров ЮlЗКИХ частщ защищая
акселерометр от проникновеmrя высокочастотных колебaJШЙ, и эф­
фективно демпфируют его поперечный и продольный резонансы.
Если высокочастотные ускореmrя укладываются в динaшrческий
диапазон, то могут применяться СУ с электроlIНЬThШ фюrьтрами
ЮlЗКИХ частот
[62],
Еще один способ, позволяющий снизить влия­
lПIе резонансов в области высоких частот и исключить перегрузку
входного каскада, зaюnoчается в преобразовaJШИ первым каскадом
сигнала акселерометра, пропорционального ускореmпo в сигнал,
пропорциональный виброскорости
[103,104],
Акселерометры, предназначенные для измереIШЯ Лlшейных
ускорений, могут быть чувствительны и к одновременно ПРИСУТ­
ствующим ротационным колебаниям объекта. Природа ротацион­
ной чувствительности и возникающие при этом погрешности из­
мереIПIЙ еще не достаточно исследованы, однако можно отметить
некоторую аналогmo с поперечной чувствительностью. Одной
из причин ротационной чувствительности может являться не­
сбалансированность моментов инерции и ассиметрия элементов
преобразователя относительно центра массы инерционного эле­
мента, например, у консольных преобразователей с рабочей де­
фор:мацией изгиба. Очевидно, что ротационная чувствительность
зависит от выбора точки и оси, относительно которых она изме­
ряется, Можно ожидать, что значеlПlе ротациоlПЮЙ чувствитель-
92
4.2.
ВЛWlНuе меиmuчetЖux фаюnоров
ности будет МИЮlмально, если за точку измерения выбран центр
симметрии преобразователя центрированной конструкции
[35],
В настоящее вре],{Я методы определения ротационной чувстви­
тельности не регламентированы, однако возможность ее влияния
на результаты измерений следует учитывать.
К неизмеряе:мым вибрациям относятся также колебания в по­
перечных, относительно рабочей оси акселерометра, направлени­
ях (см, подглаву
4.2.4.
3.2).
Влияние интенсивных вибраций и ударов
Под интенсивными вибрационными и ударными ускорениями
в данном случае подразумеваются значения, лежащие в пределах
дmшмического рабочего диапазона акселерометра, но способные,
при
определенных условиях, повлиять на его
метрологические
характеристики или работоспособность, их воздействие может
распространяться на преобразователь, соеДИlПlтельный кабель
и систему крепления акселерометра. Большое значение имеет вре­
мя воздействия, способное ВJllIЯТЬ на ми:кроструюуру ПIOA
[70]
н, следовательно, на стабильность КОЭффlЩнента преобразования
н ресурс работы, Важен также частотный спектр, составляющие
которого могут вызвать резонансные колебания элементов конс­
трукции,
сопровождающиеся
механическими
напряжениями,
превышающими предельно допустимые значения, как правило,
более слабым к таким воздействиям является направление, пер­
пеНДИКУЛЯРное к рабочей оси акселерометра, Влияние высоких
механических нагрузок УСИШlВается при одновременном сочета­
IПIИ с повьппенной температурой
[56, 69],
Наиболее подвержены механическим воздействиям чувстви­
тельные элементы акселерометра (особенно с рабочей дефор­
мацией изгиба), места заделки кабеля, узлы крепления чувстви­
тельных элементов акселерометра (при клеевом способе). Анализ
статистики отказов акселерометров при длительной эксплуата­
ции в условиях, 6шIз:ких к предельным, показывает, что до
80 %
9з
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
поломок связано с мехаЮlческим:и разрушениями, а число разру­
шившихся акселерометров может достигать до
20 % от установ­
50 % разрушеЮlЙ приходится на
20 % - на кабель и до
25 % - на отрыв клеевого крепления [71]. Возможны также ослаб­
ленных на объекте. При этом до
электромехаЮlческий преобразователь, до
ление резьбового крепления и разгерметизация корпуса.
Погрешность измерений может быть вызвана воздействием
вибрации на соедшlИТельный кабель. Механические колебания
кабеля вблизи акселерометра, передаваясь через внутренние про­
водники пьезоэлементу, способны вызвать в нем дефор:мации
и привести к появлеЮlЮ паразитных сигналов. Другой ИСТQЧЮlК
помех на низких частотах связан с трибоэлектрическим эффек­
том кабеля, Возникающие в результате динm.шческих изгибов
ИJПI растяжеЮlЙ кабеля местные отслоения экрана от диэлектрика
приводят к его электризации трением или изменеЮlЮ электриче­
ской емкости отдельных участков и появлеЮlЮ ДОПОЛЮlтельных
зарядов
[62, 98].
для эффективного ослабления сигналов, вызванных трибо­
электрическим эффектом, используются специальные антивибра­
ЦИOlПlые кабели, которые в пrnроком ассортименте выпускаются
отечествешюй промышленностью и за рубежом. Существуют эк­
ранированные однопроводные (коаксиальные), двух- и трехпро­
водные кабели, изоляция проводников которых со стороны экрана
покрыта токопроводящей защитной оболочкой. ВО всех случаях
необходима надежная фиксация соедиЮlТельного кабеля на виб­
рирующем 06ье:rcre, позволяющая исключить свободные колеба­
ния кабеля и свести к МШlИмуму вызванные ими сигналы,
Замечено, что длительное воздействие виброускорений вы­
сокого уровня на средЮlХ и высоких частотах может привести
к ухудшеffilЮ качества изоляции кабеля. Так, во вре],{Я испытания
акселерометра АВУ-003 (охарактеризован в подглаве
плитудном значении ускорения:
через
22
1,5·105
7.1) при ам­
7,5 кГц,
м·с-1 на частоте
часа сопротивление фТОРOlшастовой изоляции коакси­
ального антивибрационного кабеля СНИЗИJIось до нескольких
94
4.2.
ВЛWlНuе меиmuчetЖux фаюnоров
десятков килоом. Снижение сопротивлеlПlЯ вызвано диффузией
токопроводящего покрытия в изолятор на участке кабеля с макси­
малЬНЬDШ механическими напряжеlПlЯМИ, расположенном вбли­
зи узла заделки.
Механическая надежность акселерометра в значительной мере
зависит от способа присоединения к не:му кабеля
ствие
повышеlПlЫХ
виброперегрузок
на
[105],
кабельный
смонтированный на :корпусе акселерометра,
может
Воздей­
разъем,
привести
к нарушенШQ эле:rcrpического контакта или отрыву кабеля
[106].
При торцевом выводе кабеля обязательно образуется незакреп­
ленный отрезок в виде петли, способный совершать изгибные
колебания. Наиболее стойким и удобным для фиксации на объек­
те является интеГРИРОВaIПlЫЙ с корпусом боковой вывод кабеля
вблизи установочной ШIоскости акселерометра,
Большие знакопеременные механические напряжеlПlЯ в пье­
зоэлементе и
системе упругого поджатия,
имеющие место
интенсивных вибрациях и
приводящие
симости
от ускорения,
выходного
значеюш
сипшла
коэффициента
преобразоваIПIЯ
к
при
нелинейной зави­
могут
сказаться
акселерометра
на
[59]
или вызвать искажения формы сигнала, что особеlПlО замет­
но на высокочастотных акселерометрах при больших уровнях
ускорения
[107],
Еще одна причина изменения КОЭффlЩиен­
та преобразования может быть связана с повышением темпе­
ратуры
преобразователя
при
высокочастотных
интенсивных
вибрациях за счет механических потерь в колебательной сис­
теме, Бьшо замечено, что при виброускореюш с амrшитудой
(10-15)105
м·с-2 в диапазоне частот
7-11
кГц температура пьезо­
элемента за короткое время возрастает на несколько десятков гра­
дусов,
При измерении ударных ускореIШЙ высокого уровня, особеlПlО
вблизи верхней граЮlЦЫ рабочего динамического диапазона аксе­
лерометра, может наблюдаться так называемый дрейф нуля (или
смещение нуля)
[37], В
даlПlОМ случае имеет место наложение на
выходной сигнал экспонеIЩИально убывающего положительного
95
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
ИШI ОТРlЩательного смещения (рис,
лять
4.5),
которое может состав­
50-100 % от ПИКQвого значения и вызывать заметные ошиб­
ки измерений
[67, 68].
и(t)
Рис.
4.5. Проявление эффекта дрейфа нуля
на выходном сШ"Нале акселерометра:
1-
сигнал без дрейфа нуля;
при (<положительном»
3-
2-
сШ"Нал
смещеюrn;
сигнал при «отрицательном» смещении
Все прИЧШIы ВОЗШlкновения дрейфа нуля еще не исследова­
ны. Считается, что при быстром уменьшении силы, действую­
щей на пьезоэлемент, не являющийся абсолютно упругим телом,
не все домены успевают вернуться в исходное состояние, ПО мере
их дальнейшего возвращеlПlЯ, ВОЗШlкает электрический заряд,
уменьшающийся с ПОСТОЯlПюй времеЮl СУ. Полярность и ампли­
туда этого заряда имеет случайный характер
[62],
В качестве дру­
гих причин предполагается изменение усИШIЯ поджатия пьезо­
элементов и :контактных жесткостей на гранlЩах сопряжеlПlЯ
[71],
а также проявлеШlе пироэффекта из-за небольшого повьппеlПlЯ
температуры пьезоэлемента., вызванного мехаЮlчески:м:и потеря­
ми преобразователя при воздействШl ударного ю.шульса.
Для устранения ИШI снижеlПlЯ проявления эффеll..та дрейфа
нуля можно рекомендовать: выбор сегнетожесткого ПМ с мини­
мальными внутренЮlМИ потерями; обеспечение максимальной
96
4.3.
ВЛWIНUE элeюnpuчейШХ U,)I/JZНlImIlЫX m:»Jeй
стабильности мехаЮlческих свойств межэлементных сопрягае~
мых поверхностей; проведение искусствеlПlОГО старения пьезо~
элементов и преобразователей в собранном виде термоцикли~
РОВ3Iшем; ДlПшмическую треIПIpОВh.}' акселерометра путем воз~
действия виброускореlПlЯ и серии ударов с коротким передним
фронтом импульса; использование для измереЮlЙ акселеромет~
ров, обладающих достаточным запасом рабочих диапазонов час­
тот и ускореЮlЙ,
4.3. Влияние электрических и
магнитиых полей
Благодаря особенностям конструкции и прlПщипу действия
пьезоэлектрических акселерометров. последние
не подвержены
заметному ВЛИЯЮlЮ ПОСТОЯIПlых электрических и магнитных по­
лей. Иногда наблюдаемые ВЛИЯIШЯ переменных электрических
и электромагнитных высокочастотных полей вызваны недоста­
точным экранированием соедшlИтельных электрических цепей
датчиков или регистрирующей аппаратуры,
Иной характер на работу акселерометра оказывают перемен­
ное магlПlтное поле и электрические токи, протекающие в кoнтy~
рах заземлеlШЯ измерительных цепей.
4.3.1. Влияние nере.менного магнитного поля
Переменное магнитное поле, частота которого превосходит
IПIЖНЮЮ границу рабочего диапазона частот системы акселе­
рометр---СУ, может вызвать паразитный сигнал на выходе ак­
селерометра,
способный существенно
повлиять
на точность
измерения. это прежде всего относится к тем случаям, ког­
да
измеряются
малые
ускореlПlЯ
или
измерения
проводятся
в условиях воздействия сильных полей, Например, при контроле
вибрации лобовых частей статоров мощных турбогенераторов,
где
напряженность
3·105
переменного
магнитного
поля
превышает
А·м-1, погреппlOСТЬ измерения большинства серийно вы-
97
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
пускаемых акселерометров может превосходить
10
м·с
2
[58],
как показали исследования, чувствительность кмагнитно:муполю
имеет нелинеЙIlЫЙ характер и главным образом определяется:
магнитострикцией ферромагнитных деталей и присоединенных
к Юlм элементов конструкции; взаимодействием вихревых токов,
наведенных в деталях преобразователя с внешним магнитным по­
лем; наведешюй в соедmштельных провоДIШках: итоковедущих
деталях ЭДС, пропорциональной скорости ИThIенеlПlЯ магнитно­
го потока, При поперечном расположеЮlИ оси чувствительности
акселерометра относительно
направления магЮlтного
поля
его
магнитная чувствительность на порядок меньше, чем при про­
дольном расположении
[63,108],
Основной вклад в формирование выходного эле:rcrpического
сигнала связан с магнитной восприимчивостью материалов кон­
струкционных элементов. Воздействие переменного магнитного
поля непосредственно на П:М: не приводит к появлеffilЮ :каких­
либо сигналов, В результате магнитострикционного эффекта ме­
таллические элементы конструкции испытывают деформацшо на
частоте в два раза превышающей частоту внешнего магнитного
поля. Особенно сильно проявляется магнитострикция у ферро­
магнитных материалов, в том числе сплавов, содержащих железо,
никель и кобальт, Возникающие в деталях деформации передают­
ся пьезоэлементу, что и приводит К ВОЗЮlкновению паразитного
сигнала на двойной частоте,
Силы, вызванные взаимодействием с внешним полем элект­
рических токов, наведенных в токопроводящих элементах конс­
трукции, с одной стороны, приводят К деформации этих элемен­
тов, передающихся пьезоэлементам, а с другой стороны, могут
непосредственно воздействовать на них, складываясь с рабочими
деформациями от вибрации. Примером последнего может слу­
жить движение Шlерционного элемента ИШI стяжного кольца
[62],
используемого в некоторых конструкциях рассмотренных ниже
акселерометров (см. рис,
7,13, 7,14). Возникающие при этом силы
пропорциональны массе, размерам элементов и удельной ПРОВО-
98
4.3.
ВЛWIНUE элeюnpuчейШХ U,)I/JZНlImIlЫX m:»Jeй
димости материалов, Частота паразитных сигналов, вызванных
взаимодействием наведенных токов, также в два раза превышает
частоту внеIШIего поля,
СlП'Нал помехи, связанный с наведеЮlем СlП'Нала в соедини­
тельных проводниках, проявляется с частотой внеIШIего поля
и особеюlO заметен в акселерометрах со сложной схемой комму­
TaцmI пьезоэлементов,
Особым случаем в формировании чувствительности к пере­
менному магЮlтному полю может быть наличие в датчике пос­
тоянных магнитов или намагниченных элементов конструкции,
в частности под воздействием одновремеюlO приcyrcтвующего
постоянного магнитного поля, Их роль могут играть магниты
в системе крепления акселерометра (см. главу
6)
или иные, из­
готовленные из ферромагнитных материалов детали (стяжные
шпильки, пружины и др,)_ Силы взаимодействия таких элементов
с переменным магнитным полем могут быть достаточно велики,
Частота возникающих в данном случае паразитных сигналов сов­
падает с частотой внешнего поля,
Чувствительность акселерометров к переменному магнитному
полю характеризуется КОЭффlЩиентом влияния мапштного поля
(КВМП) К"(Н)' выраженном в
(M-c-2)/(A-c-1),
который определяют
по фор:мулам:
КЩН) = Hi,.
К
м(Н)
где
Q,
и
=~
НК,,'
(4.10)
(4.11)
- максимальные значения заряда (пКл) и напряжения,
(мВ) на выходе акселерометра при воздействии переменного
магнитного поля;
Н - напряженность магнитного поля, А-]"г 1 ;
К ,К
- КОЭффlЩиенты преобразования акселерометра
p~дy (пКл·М-1_с 1 ) И напряжеЮlЮ (mB-м-1_с 1 )_
по за­
99
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
Если КВМП нормирован в
%/(A'hr1),
то его определяют по
формулам:
к
М(Н)
к
М(Н)
где аmш;
-
=--Q--
(4.12)
Н.К,'а ..ах'
__
= _ _и
(4.13)
Н 'Кп .а тах '
предельное значение диапазона измерения ускорений
акселерометра, ~I"c-2,
В качестве наиболее распространенных способов Сffilжения
КВJ\.Ш, использующихся при конструировании акселерометров
общего назначения, следует отметить следующие
-
[58, 108J;
применеIШе в конструкции акселерометра и для его крепле­
ния деталей из материалов, обладающих диа- или парамaгmrrны­
ми свойствами, с целью предельного снижения ВЛИЯIПIЯ мапшто­
стрикщш:;
-
использование конструкционных материалов, включая мате­
риал корпуса, с большим удельным сопротивлением для уменьшеlПlЯ вихревых токов;
-
ВЫПOJПlеffilе рационального монтажа соединительных про­
водников
внутри акселерометра, исключающего
образование
контурных линий для уменьшения ЭДС индукции;
-
применение помехозащищенных конструктивных схем аксе­
лерометров, например диффереIЩИальных;
-
повьппение коэффициента преобразоваlПlЯ акселерометра,
При проектироваffilИ акселерометров, предназначенных для
специальных условий применения в СIШЬных переменных маг­
нитных полях, полезными могут оказаться следующие ДОПOJПlи­
тельные меры;
-
ВЬПIОJПIение корпуса, инерционного и других конструкцион­
ных элементов из диэлектрических материалов, например кера­
мических, ко~mозlЩИОННЫХ или полимерных;
100
4.3.
-
ВЛWIНUE элeюnpuчейШХ U,)I/JZНlImIlЫX m:»Jeй
использование в качестве электростатического экрана тон­
кослойного металлического не:магнитного покрытия корпуса;
вьmолнеIПIе электродов пьезоэле:мента с конфигурацией,
-
способствующей ослабленmo наведенных в них вихревых то­
ков;
-
принятие Мер для снижеЮIЯ передачи пьезоэлементу дефор­
маций, возникающих в корпусе акселерометра под воздействием
переменного поля, аналогичных :мерам снижеЮIЯ деформацион­
ной чувствительности;
-
недопущеIПIе петель или витков на соедlПlИТельном кабеле,
особенно коаксиальном, для предотвращеЮIЯ наведенного сиг­
нала.
4.3.2.
Влияние токов в контурах заземления
в ряде случаев, особенно на энерговырабатывающем и мощном
энергопотребляющем оборудоваIПIИ, отдельные точки контроли­
руемого объеR"I'а и сети заземлеIШЯ могут находиться под разны­
ми электрическими потеIЩиалами, вызванными протекающими
в системе болышIии токами, При подключеIПIИ акселерометра
к регистрирующему устройству, если заземление осуществляет­
ся в двух или более точках, возникают контуры заземления, а по
экранам :кабелей протекают переменные токи, создающие помехи
на частоте электросети.
Наиболее
хождения
подвержены
измерительные
воздействию
системы,
помех
содержащие
такого
проис­
акселерометр
с несимметричным выходом (одlПl из выводов преобразователя
электрически соединен с корпусом акселерометра) и СУ с несим­
метричным: (заземленным) входом, когда корпуса акселерометра
и СУ зазе],шены в местах их расположения. Если между точка­
ми заземлеЮIЯ на объекте существует разность потенциалов
(рис,
4.6),
U
то при большом входном сопротивлении СУН на его
выходе существует напряжеlllIе помехи ип, поступающее через
внутреlПlее емкостное сопротивление пьезоэлектрического пре-
101
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
образователя акселерометра
[109],
Uп=Ukу~,
(4.14)
Сп+Ск
где
ky -
коэффициент усилеlШЯ СУН.
i-i~------1
3
г ------- 21
i__ :
__
!
!____________ ]
4
--и--
А
Рис.
Б
4.6. Несимметричная
(однопроводная)
схема подкшочеЮIЯ акселерометра к СУ:
1-
34-
акселерометр;
2-
СУ;
сш-:нальн:ый провод :кабеля;
экран кабеля; А и Б
-
точки заземления
:корпуса акселерометра и СУ соответственно
Если же на входе регистрирующего устройства используется
СЗУ, то напряжение помехи на его выходе
(4.15)
где С
- емкость цепи обратной связи СЗУ.
Н~яжение помехи на выходе СУ может быть значительным,
так как в реальных условиях эксплуатации разность потенциа­
лов в точках зазеWIения при больших дшrnах соедИIШтельных
кабелей иногда составляет несколько десятков вольт. Эффектив­
ное (до двух порядков) подавлеЮlе электрических помех при ис­
пользоваЮlИ акселерометров с несш...IМетричным выходом дости-
102
4.3.
ВЛWIНUE элeюnpuчейШХ U,)I/JZНlImIlЫX m:»Jeй
гается путем электрической изоляции акселерометра от объекта
[62, 56]. Экран соедlПlИТе.льноro кабеля и СУ дОЛЖНЫ заземляться
только в одной точке, а электрическая емкость изолятора акселе­
рометра, через которую передается сигнал помехи, должна быть
МlПlимальной
[110].
Высокой помехозащищешlOСТЬЮ обладают
акселерометры с симметричным выходом, а также имеющие диф­
фереIЩИальную схему (рис,
4,7).
i~
1Ш
~~
1Ш
Рис.
4.7. Конструктивные и электрические cxeIl.[ы акселерометров
С с:и::м:метричным (а-в) и диффереIЩИaJIЬНЫ::М выходшПI (г):
1-
основание;
элемент;
2 - изолятор; 3 - пьезоэлемент; 4 - инерционный
CI, с2 - электрическая емкость изолятора;
ПI, п2 - пьезоэлемент
Сш...ThlетричныЙ двухпроводный выход выполняется изолирован­
ным от корпуса акселерометра (рис, 4,7а) или не изолированным
(рис.
4.76),
Первый вариант получил более широкое распростра­
неЮlе благодаря универсальности применения.
В акселерометрах с симметричным выходом, при подключе­
Юlи их к СУ с симметричным входом, происходит взаимная КОМ-
103
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
пенсация наведенных паразитных сигналов, Для максимально­
го подавлеIШЯ помех необходимо обеспечить возможно полную
электрическую симметршо схемы, то есть равенство емкостей
изоляторов Сl и С2, пьезоэлементов Пl и П2, а также проводов
кабеля относительно их экрана, Желательно, чтобы емкость изо­
ляторов была минимальной, во всяком случае :много меньшей
е:мкости пьезоэлементов. Требование к симметрии распространя­
ется также на входные характеристики диффереIЩИальных или
с изолированным от земли входом СУ Названные меры позволя­
ют более чем на 40 дЕ СffilЗИТЬ эле:rcrpические и эле:rcrpомагнитные
помехи, а также помехи от трибоэле:rcrpического и микрофонного
эффектов соединительного кабеля
[111],
Подключение акселеро­
метра с симметричным выходом к СУ с несимметричным зазем­
ленным входом эквивалентно примененшо датчика с несиммет­
ричным выходом,
При некоторых условиях эксплуатации хорошо зарекомен­
довала себя схема акселерометра с симметричным изолирован­
ным выходом и двойным экраном :кабеля (рис,
4,76),
При этом
внутренний экран по всей длине ИЗОШIpован от внешнего экрана
и от корпуса датчика, В качестве внешнего экрана, электрически
соединенного с корпусами акселерометра и СУ, может использо­
ваться защитный металлорукав :кабеля.
Применение диффереIЩИальных КОНСТРj'ICI'ивных схем датчи­
ков обеспечивает существенное снижеffilе уровня помех от де­
фор:маций, передаваемых пьезоэлементу от корпуса, воздействия
электромarnитного поля и других факторов. Наиболее эффекrив­
ное снижеffilе уровня синфазной помехи от воздействия на со­
едИlПlтельный :кабель эле:rcrpомагнитного поля и ТОКОВ в контурах
заземлеIПIЯ, что особенно важно при дmпПlЫХ соедиЮlтельных
ЛИНИЯХ, достигается применеШlем дифференциального усили­
теля. К дифференциальному усилителю, в зависимости от его
схемы, могут подключаться датчики с двух- или трехпроводным
(рис, 4,7г) выходом, Экспериментальные исследования показали,
что датчик с дифференциальным выходом и с диффереIЩИаль-
104
4.4.
ВЛWlНuе лJE,vJJерamypы
ным УСИШIтелем может обладать на три порядка лучшей помехо­
защmценностью, чем датчик с CI-DvIМетричным выходом, подклю­
ченный с СУ с симметричным входом
[110],
4.4. Влиянне температуры
4.4.1. Влuяnuе постоянной температуры
При ИThIерении параметров вибрации наиболее часто прихо­
дится сталкиваться с температурными воздействИЯJ\Ш на аксе­
лерометр. ПО характеру воздействия следует различать влияния
постоянной или медленно изменяющейся температуры и быстрых
температурных колебаний, Температурное воздействие считается
медленным, то есть эквивалентным статическо:му, если время из­
менения температуры от начального до конечного значеlПlЙ много
больше времени установления практически одинаковой темпера­
туры во всем объеме датчика, а также времеlПl, за которое успева­
ет полностью стекать ВОЗlПlкающий на пьезоэлементе заряд,
В зависимости от температурных условий эксплуатации, хра­
нения или транспортирования для акселерометров определяют
соответствующие температурные диапазоны, допускающие дли­
тельное воздействие постоянной ИmI медленно изменяющейся
температуры. Наиболее узкий рабочий диапазон температур
устанавливается для эталонных акселерометров, предназначен­
ных для эксплуатации в лабораторных условиях, близких к нор­
мальным, Более широкий рабочий диапазон связан с эксплуата­
цией акселерометров в условиях климатического воздействия.
При этом нижняя граница диапазона, :как правило, ограШlчена
пределом минус
60
ОС, а верхняя не превышает
60-80
Ос. для
акселерометров, предназначенных для лабораторных исследова­
ний и работы на промышленных объектах, в большинстве слу­
чаев достаточной является температура эксплуатации до
250 ос,
Однако существует ряд задач измерения, связанных с воздейс­
твием экстремальных температур, Повышенные (до
250--400 ОС)
105
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
и высокие (до
600-700
ос и более) температуры в местах рас­
положения акселерометров встречаются на реактивных и ракет­
ных
двигателях,
атомных
энергетических реакторах
и
других
объектах.
Необходи::~юсть работы датчиков при экстремально низких
температурах связана с проведеЮlем измерений в космическом
пространстве,
на криогенной и ракетной теХЮlке, использу­
ющих жидкий :кислород или водород (температуры кипения ми­
нус
183
ос и минус
253
ОС).
Экстремальные температуры воздействуют на все составные
части акселерометра: корпус; узел преобразователя, ВК1ПОчая пъе­
зоэлементы
и
изоляторы;
механические
соединения
элементов
конструкции; соедиЮlтелъный кабель, а также систему крепле­
ния на объе:rcre. Они вызывают изменение метрологических ха­
рактеристик, а при сочетamш: с другими влияющими факторами
шюгда приводят к потере работоспособности датчика. Механиз­
мы проявления воздействий положительных и ОТРlЩателъных
температур имеют различный характер.
Уже QТмечалось (см, подглаву
3.5) наличие
температурной за­
висимости электрофизических параметров п:rvr:, в том числе пъе­
зомодуля и диэлектрической прошщаемости, непосредственно
ВЛИЯЮЩИХ на значеШlе КОЭффlЩиентов преобразования по заряду
и напряжеШlЮ, как правило, повышение температуры приводит
к росту значений пьезомодуля и диэлектрической прошщаемос­
ти, При низких температурах, наоборот, набmoдается подавлеlПlе
значеЮlЙ ЭТИХ параметров.
Заметное температурное ВЛИЯIПlе на метрологические и экс­
плуатаЦИOlПlые
характеристики
акселерометров
также
может
быть вызвано и рядом других причин.
Дополнительные
механические
напряжения,
ВОЗlПlкающие
при изменеЮlИ температуры в результате различий КЛТР конс­
трукционных и пьезоэлектрического материалов, искажают рабо­
чую деформацию пьезоэлемента, что сказывается на значении его
КОЭффlЩиента преобразования
106
[86].
4.4.
ВЛWlНuе лJE,vJJерamypы
В зависимости от температуры изменяется жесткость клее~
вых межэлементных соединений. В результате, в конструкциях
с клеевым соединением элементов изменяются граничные усло~
вия закрепления пьезоэлемента, что оказывает влияние на значе~
IПIЯ коэффициентов преобразования. Уменьшение жесткости кле~
евого слоя при повышеююй температуре приводит к СlШжению
резонансной частоты акселерометра
[112-114],
При отрицатель~
ной температуре эффект имеет противоположный характер, Ме­
хаlШЧеская прочность клеевых соеДl-шений уменьшается при воз­
действии как повьппенных, так и отрицательных температур, при
которых клеи и зa.rш:вочные компаунды становятся более хрупки­
ми. Это неизбежно приводит к снижению верхнего предела изме­
ряемого ускорения за счет ослабления прочности конструкции,
При клеевом или магнитном креплении акселерометра на объекте
также необходимо учитывать предельные рабочие температуры
и температурные изменения свойств использованного для этой
цели клея или постоянного магнита.
На работу акселерометра с предварительным упругим под­
жатием
элементов
влияние
экстремальных температур
связано
с изменением прочностных и упругих свойств элементов систе­
мы поджатия, сказывающихся на усилии поджатия пьезоэлемен­
ТОВ. как следствие
-
снижение верхней границы динm.IИЧескоro
диапазона и ЛlПlейности АХ,
Логично предположить влияние температуры и на О:КПП aK~
селерометра. К сожалеIПIЮ, данный вопрос практически не изу­
чен,
Воздействие
сопротивлеIПIЯ
высокой температуры приводит к
изоляции пьезоэлементов и
СlШжению
ИЗОЛЯТОРОВ,
что
от­
рицательно сказывается на работе СЗУ, способствуя повыше­
нию внутренних ШУМ:ОВ усилителя
[115],
IIIиpоко используемые
в акселерометрах общего назначения антивибрационные кабели
с фторопластовой изоляцией имеют длительный ресурс работы
только до
250 ОС,
200 ос,
Хотя работоспособность кабеля сохраняется до
однако сильно снижается ДJПпельность работы и механи107
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
ческая прочность, При очень низких темпераrypах такой кабель
становится х:руп:кm.I и может разрушаться от вибрации.
Создание акселерометров, предназначенных для работы в экс­
тремальных температурных условиях, особеmю в области высо­
ких температур, является сложной технической задачей, требу­
ющей комплексного подхода при выборе пьезоэлектрического
и КОНСТРУКЦИOlПlых материалов, типа кабеля, конструктивной
схемы и технолоГJШ изготовления.
Для выполнеlПlЯ пьезоэлемента должен использоваться моно­
кристаллический или пьезокерамический lПv.I с ~IИlПIмальным
изменением пьезомодуля в рабочем диапазоне температур, обла­
дающий достаточно высоким удельным сопротивлением при мак­
симальной температуре, В высокотемпературных акселерометрах
для этой цели прш.Iеняются монокристаллы турмалина, ниобата
лития или ПКМ на основе модифицированных титаната висмута
и титаната-lПIобата висмута,
ЭлеIcrpОДЫ пьезоэлементадолжны длительное время выдержи­
вать предельную Te~meparypy и не вступать в реакцшо с матери­
алом сопрягаемых элементов, например токосъемных прокладок.
При температурах выше
450-500
ос для электродов целесообраз­
но использовать золото, платину, палладий IШИ аналогичные по
свойствам сплавы,
Изоляторы датчика должны выдерживать высокую температу­
ру и сохранять при этом необходимую механическую прочность
(не менее
lO'l
Н·см-2). ЗначеlПlЯ КЛРТ материалов изоляторов
и пьезоэлементов должны быть 6.тш:зкими,
Относительная
диэлеIcrpическая
изоляторов не должна превышать
проницаемость
10-50,
материала
а их электрическое со­
противление должно значительно превосходить общее сопротив­
леlПlе пьезоэлементов. из ПOШlкристаллических материалов для
этой цели могут использоваться алюмооксидная, форстеритовая
и стеатитовая керамики
[116],
В высокотемпературных датчиках обычно применяются ка­
бели с оболочкой из нержавеющей стали и минеральной изоля-
108
4.4.
ВЛWlНuе лJE,vJJерamypы
цией, обладающие малым трибоэлектрическим и микрофонным
эффектами. Удельное электрическое сопротивление изоляции
таких кабелей, равное
снижается до
105
1011
Ом·м- 1 при нормальной температуре,
Ом·м- 1 при
800
ос
[117],
Общее сопротивление
изоляции пьезоэлементов вместе с изоляторами и кабелем, при
температурах
600-700
ОС, может СlПlжаться до
1()4
Ом. Это тpe~
бует применеlПlЯ специального СЗУ, способного устойчиво рабо~
тать при низком входном сопротивлении
[115, 118],
При выборе конструкционных материалов необходимо исполь~
зовать нержавеющие стали и специальные сплавы, сохраняющие
прочностные и упругие свойства при максимальной рабочей тeM~
пературе. При высокой температуре некоторые металлы, тради~
ЦИОIПIО используе~IЫе в конструкциях акселерометров общего Ha~
значеIШЯ, интенсивно окисляются ИШI разрушаются. Например,
сплав ВНМ при температуре выше
lПIем газообразной фазы
[117],
400
ос разлагается с выделе~
Длительность работы титановых
сплавов при температурах вьппе
450-500 ос также
ограffilчена за
счет потери прочности, вызваlПlОЙ растворением в них кислоро~
да. для защиты элементов конструкции от высокотемпературной
коррозии целесообразно заполнеlПlе внутреlПlего объема датчика
lПIертным газом.
Начиная с температур
УНДОВ
для
250-300
соединения элементов
ос применение клеев и КOМIIa~
конструкции и
герметизации
не может обеспечить высокую надежность датчика. Для этих цe~
лей используются различные виды сварки, в том числе лазерной
и элеКТРОIПIO~лучевой, а также пайки высокотемпературными
припоями
[116,118],
В случаях, когдане представляется возможным обеспечить He~
обходимую максимальную рабочую температуру акселерометра
рассмотренными выше способами, применяются конструкции
с принудительным охлаждением. Используются два основных
способа такого охлаждения. Первый основан на при:менении
тепловых изолятора и экрана, установленных между объектом
и акселерометром, при одновременном обдуве акселерометра
109
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
внешним потоком воздуха
[62],
Дополнительно, между теIШО­
изолятором и экраном, может помещаться охлаждаемый жид­
костью переходной элемент, что позволяет использовать акселе­
рометры общего назначения при температуре объекта до
[63],
500
"С
Второй способ основан на охлаждеmm преобразователя и
внутреннего объема корпуса акселерометра протекающим через
них потоком жидкости или газа
[65],
для улучшения условий
охлаждеЮlЯ целесообразно устанавливать акселерометр через
термоизоляционную прокладку, Следует заметить, что исполь­
зование
ПРlПIудительного
охлаждения
связано
с
ДОПОЛIПIтель­
ными техническими сложностями и снижает надежность рабо­
ты акселерометра,
4.4.2. Влuяnие темnературnых колебаний
Циклические изменения и резкие скачки температуры аксе­
лерометра, относящиеся к быстрым влияющим факторам, могут
вызывать значительные паразитные сиrnaлы в диапазоне рабочих
частот, смещение рабочей точки или временную перегрузку СУ
Основными причmшми появлеffiIЯ этих сиrnалов являются;
возникновеIШе зарядов, обусловленных пироэффектом; те:~шера­
турная деформация пъезоэлемента; неоднородные механические
напряжения, вызванные различием КЛРТ материалов сопрягае­
мых элементов и температурными градиентами в
акселерометра
конструкции
[62].
Оценочное сравнение значеIШЙ пирокоэффициентов (отноше­
ffiIЯ изменеffiIЯ поляризованности диэле:rcrpика к вызывающему
это изменеЮlе интервалу температуры) для ПRJvl, имеющих по­
рядок 100З Кл·],г2 'град-l
[119]
и пьезомодуля dзз показывает, что
изменение температуры пъезоэлемента акселерометра на
1 град
должно вызывать появление сигнала, эквивалентного воздейс­
твШQ ускореffiIЯ
10"-106
м·с-2 , В реальных случаях ВЛИЯЮlе п:иро­
эффекта значительно ffilже, так как, благодаря тепловой инерции
датчика, изменение температуры замедляется и большая часть
110
4.4.
ВЛWlНuе лJE,vJJерamypы
пирозаряда успевает стекать через сопротивления изоляции и на­
грузки
[69].
как покззa.JПI теоретические и экспериментальные исследова­
IПIЯ, выходной сигнал только за счет пироэффеIcrа должен быть на
несколько порядков IПIже сигнала, вызванного температурными
деформациями. Общая чувствительность акселерометра к пере­
менным температурам зависит от его конструктивных особеннос­
тей, тепловых и механических характеристик конструкционных
материалов, электрофизических констант ПfvI, а также постоян­
ной времеlПl системы датчик-СУ. У нетермокомпенсированных
заще~mенных
конструкций
акселерометров
чувствительность
к переменным температурам может быть сильно повышена за
счет изменеIШЯ усилия предварительного поджатия
[120].
для акселерометров коэффициент влияния перепада темпера­
тур (КВПТ), m·c-1j О С, определяется по формулам:
к
к
где
Qmax'
,.АТ
п.АТ
=
=
Q.ш
(4.16)
U. Ш
(4.17)
К,.I1Т'
К".I1Т'
иmax - IlliКOBыe значения выходного сигнала акселеромет­
ра (заряда, пКл, и напряжения, мВ, соответствеюю);
АТ
-
разница между конечной и начальной температура­
ми, ос,
Благодаря компенсации mqюзарядов, наименьшее значение
КВПТ, по сравненШQ с простыми компрессионными акселеро­
метрами, имеют конструкции с рабочей деформацией сдвша
и с симметричными биморфными пьезоэлементами, В пьезоэле­
ментах с деформацией растяжения---сжатия, наоборот, пиросигна­
лы складываются с полезным сигналом (рис,
4.8),
В компреССИQIПlЫХ акселерометрах с диффереlЩИальными
пьезоэлементами
также
происходит
компенсация
пирозарядов,
III
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
в зависимости от степени механической и электрической симмет­
рии пьезоэлементов дифференциальной пары, чувствительность
к измененШQ температуры, по сравнеffilЮ с обычной конструкци­
ей, может быть снижена в
50--100 раз,
t -CUЛЫ,деiicmвующuеllдl1bе3оэлемIЖЩ
+ _
t
1&6 -зерl!дbl.вызееннЫ(jI1U~moм
-lIanравленuеВ(jI/mораnOnЯ(XJЗOfJаююсt1щ
Рис.
4.8.
-зap!iЬ~6ЬfJ//дI!If>lврабочвйдеформацueй;
Заряды, возникающие в пьезоэлементах с различными
типшш рабочей деформации под действием инерционных сил
и в результате пироэффе:кта (при росте температуры):
а - пьезоэлемент с деформацией растяжения-;;жатия;
б - с деформацией сдвига; в - б:иморфный пьезоэлемент
с последовательным вюпочен:ием ПJIaCТШI; г
-
с параллельным
вкmoчением rшаст:ин
Сигнал помехи, вызванный температурными колебаниями, на­
иболее заметно проявляется на низких частотах (до
2-3
Гц), осо­
беmю при измерении малых ускорений, Эффе:rcrивному подавле­
ffilЮ этого сШ'Нала способствует при:менение теплозащитной обо­
лочки из материала с низкой теплопроводностью
Значительные по
амшrnтуде
[120],
перепады температуры могут
привести к сильным механическим напряжениям, способным вы-
112
4.5.
ВЛWIНUE гидрохимических свойcmв Qкру.нсающей cpeды
звать разрушение клеевых соединеЮlЙ, пьезоэлементов и керами­
ческих изоляторов.
В процессе проведения термотреIШpОВКИ, испытаний на теМ­
пературную устойчивость, транспортироваIПIЯ и хранения пье­
зоэлектрических
датчиков,
на
электродах
их
пьезоэлементов
возможно ВОЗЮlкновение электрических напряжений, достаточ­
ных для дестабrшизирующего воздействия на ПЮvl и изменения
метрологических характеристик
[121],
Поэтому для стекаЮIЯ за­
рядов, вызванных температурными колебаниями, выводы пьезо­
электрических датчиков должны быть замкнуты,
4.5. Влияиие
гидрохимических свойств окружающей среды
в процессе эксплуатации акселерометра, в случае нарушения
герметичности его корпуса или соедИlПlТельного кабеля, возмож­
но проникновеЮlе влаги и паров химических веществ, находя­
щихся в атмосфере. Это приводит к снижеlПlЮ сопротивления
электрической изоляции, коррозии или разрушеmпo элементов
конструкции и может отрицательно сказаться на работе акселеро­
метра. Разъем для присоединеlПlЯ кабеля также должен быть гер­
метичным или допоJППlТельно герметизированным при помощи
соответствующих компаундов. В датчиках, предназначенных для
длительной эксплуатации на открытом воздухе, в помещеlШЯX
с высокой влажностью или под водой, используются специаль­
ные влагостойкие кабели в дополнительной резиновой оболочке
с неразъемным вулканизированным присоеДIПIeнием к корпусу.
Повышенная концентрация некоторых агрессивных химиче­
ских веществ иногда приводит к сквозной коррозии корпуса ак­
селерометра, если он ВЬПIолнен из несоответствующего условиям
эксплуатации материала. Например, дюралю~rnlПlй интенсивно
разрушается при контшcre с морской водой, щелочами и некото­
рыми Тlшами грунта. Высокую коррозионную стойкость имеют
титановые сплавы, однако она может резко снижаться при повы­
шенных температурах. Особо подвержен коррозии титан при воз113
Пава
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
4.
действии фтора и плавиковой кислоты, Высокой КОРРОЗИОlПюй
стойкостью В IШIpоком интервале температур отличаются некото­
рые марки нержавеющих сталей,
Для исключения элекrpохимической коррозии на границах
разных металлов при выборе материала :корпуса акселерометра
следует учитывать и материал :КОНТРOШl]Jуемого объекта в месте
крепления датчика,
4.6. Влияние
проникающей радиации
Интенсивные потоки нейтронов и гамма-квантов представля­
ют особый влияющий фактор, вызывающий необратимые физи­
ко-химические изменения в пьезоэлектрических и конструкцион­
ных материалах датчика одновременно с саморазогревом элемен­
ТОВ его конструкции.
Воздействие гамма-излучения
неmпo
практически
всех
его
на IIКМ приводит К изме­
элекrpофизически:х
ристик,
Экспериментальные
исследования
системы
ЦТС
при
1,3'106
Кл·кr l
показали,
(5·109
что
характе­
некоторых
ЭКСПОЗlЩионных дозах
П:М:
до
Р) происходит процесс стабилизации кера­
мики. При этом наблюдается небольшое СЮlжение ее параметров:
пьезомодуля dзз
-
от
тангенса угла диэлектрических потерь
1,5
36 %,
до
18 %,
от
1 до 1О %, диэлекrpической ПРОffilцаемости­
- от 22 до
Электрическое сопротивлеlШе пьезоэлементов после 06лу­
чеlПlЯ СЮIЖается в
(1011-10 11
2-7 раз,
но остается еще достаточно высоким
Ом) для нормальной работы датчиков. Несколько по­
вьппается стабильность пьезо]"юдуля к воздействmo статического
сжатия и температуры, Сопоставление результатов электрофизи­
чески:х измерений с анализом микроструктуры позволяет сделать
вывод, что механизм стабилизации свойств ПЮvl под действием
гамма-излучения происходит за счет закрепление доменных сте­
нок практически при неизменной доменной структуре
Возрастание ЭКСПОЗИЦИОIПюй дозы до
[122],
5,2'106 Кл·кr l (2'1010 Р)
приводит К дальнейшему сниженmo пьезоaIcrИВНОСТИ, Напри-
114
4.6. ВЛWIНUE nрmщкающей рai}шщuu
мер, необратимое изменеЮlе пьезомодуля dзз ЦТС-19 составляет
а коэффициента gзз - до
25 %,
8 %,
Набшодаются локальные от­
слоения серебряных электродов от поверхности керамики. Таким
образом, экспозиционная доза гамма-облучеlПlЯ, составляющая
(1-5)'106 Кл·кr l
мой [66].
для данного ПКМ является предельно допусти­
При размещеЮlИ датчика внутри ядерного реактора основной
действующий фактор представляют быстрые и теrшовые нейтро­
ны, вызывающие смещения атомов в :кристаллической решетке,
превращеffiIЯ и образоваlПlЯ атомов примесей, При этом изменя­
ются пьезоэлектрические и механические параметры ПЮvl. Со­
гласно экспериментальным данным, параметры ПКМ ЦТС-19
и ЦТС-23 дО интегральной дозы облучения (по быстрым нейтро­
нам)
0,3'101"
уже при дозе
см-1 остаются практически без изменения. Однако
2,6' 10 lB
см-1 СЮlжение пьеЗОА-ЮДУЛЯ dзз и коэффlЩИ­
ентаgзз составляет соответствеююдля ЦТС-19-40
ЦТС-23
на
4--5
- 15 % и 1О %,
% и 12 %, для
сопротивлеIШЯ изоляции пьезоэлементов­
порядков. После набора дозы
1019 CM-1
наблюдается резкое
падеlПlе пьезомодуля, а при ее увеличеIШИ еще на порядок, ПК
полностью теряет пьезоактивность, становится хрупкой и начи­
нает разрушаться. Можно считать, что при допустимом снижеlПlИ
пьезомодуля на
15-20 %, предельная доза нейтроююго 06лучеIПIЯ
101" см-1 [123, 124],
для ЦТС-19 и ЦТС-23 составляет
Проникающая радиация, действуя на полимерные материалы,
в частности клеи и изоляцmo, также вызывает необратимые из­
менениям их свойств. Наблюдаются процессы сшивки молекул,
возрастание молекулярного веса и образование пространствен­
ной сетки или процессы деструкции,
Исследования
радиациоююй
стойкости
некоторых
конс­
трукционных клеев отечественного производства показали, что
прочность клеевых соединений с их использованием практи­
чески не изменяется до ЭКСПОЗlЩионной дозы гамма-излучения
2,6·10"
Кл'кr l , Доза на порядок вьппе уже приводит к заметно­
~IY сниженmo прочности некоторых клеев. Наиболее стойкими
ll5
Пава
4.
Внeшxuе факторы. lШWUощrJe на работу ЛЬе3оэлекmpuческnгo акеелера'М!fТIра
к воздействlПQ гамма-квантов являются клеи К-600, ПУ-2, К-З00
и ВС-350, При дозе
2,6'105 Кл·к:г- I
прочность клея К-600 не изме­
няется, а остальных -снижается не более чем на 25
%,
Аналогич­
ное воздействие на IПIX оказывает доза нейтронного облучения
до
3,4'1016 см-1 , При дозе 1017 см-1 наиболеерабoroспособны клеи
К-600, ПУ -2 и ВС-350, прочность которых СlПlжается не более
чем на 16 %, Более высокие дозы (до 3,4-1016 с]"г1 ) вызывают зна­
чительное СlПlжение прочности клеевых соеДШIений или их раз­
рушение
(125]. Воздействие нейтронных потоков с JПlТенсивнос­
1011 см-1 ·с- 1 на кабeJШ с фторопластовой изоляцией уже
[116],
тью более
приводит к ее разрушенIПQ в процессе эксплуатации
За счет поглощаемой энергии излучения элементами конструк­
ции датчика происходит их саморазогрев, При высокой интенсив­
ности потока поглощаемая мощность может достигать
1О BT'rl ,
что способно вывести датчик из строя только за счет собствен­
ного перегрева. Например, при воздействии гамма-и.злучеlПlЯ
с интенсивностью потока 2'1<У Р'с-l, температура пьезоэлемента
составляет
70-75
ос
[65]. При интенсивности потока (по быстрым
1014 см-1·с- I , температура может пре­
и тепловым нейтронам) до
вышать
150
ос
[123].
Для акселерометров, работающих в усло­
виях воздействия повышенных температур окружающей среды
и IПIтенсивной проникающей радиации, часто требуется прину­
дительное охлаждение
[65],
Пршщипы конструирования пьезоэлектрических акселеромет­
ров для работы в IПIтенсивных потоках излучения и при высокой
температуре аналогичны, Прежде всего, это отказ от использова­
IПIЯ клеевых соеДlПlений и полимерных материалов, применеlПlе
в качестве конструкционных материалов специальных нержаве­
ющих сталей и кабелей со сплоппюй металлической оболочкой
и ШIнеральной изоляцией.
116
ГЛАВА
5
КОНСТРУКТИВНЫЕ СХЕМЫ И ОСОБЕННОСТИ
ВЫПОЛНЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИХ
АКСЕЛЕРОМЕТРОВ
5.1. Классификация
пьезоэлектрических акселерометров
в основе классификации пьезоэлектрических акселерометров
лежит ПОДХОД, IIpIПlЯТЫЙ для виброизмерительных приборов И ап­
паратуры в целом, а также по конструктивным и эксплуатацион­
ным особеюlOСТЯМ
[35, 71, 126].
Приведенная ниже развернутая классификация, безусловно,
не претендующая на абсолютную строгость и полноту, пред­
ложена ДЛЯ обеспечения некоторой систематизации излагаемо­
го материала. Она может содействовать праВИЛЬНQМУ выбору
типа акселерометра, наиболее соответствующего конкретной
задаче проводимого измерения, использоваться при описании
разнообразных
конструкций,
конкретизации
терминологии
и выработке технических требований к датчико-преобразую­
щей аппаратуре,
Констр)'Ю'ивные признаки пьезоэлектрических акселеромет·
ров условно делятся на две основные группы (рис,
1) особенности ВЬПIQШlения
2) особеIПIОСТИ выполнеЮIЯ
5.1);
акселерометра в целом;
электромеханического преобразо·
вателя акселерометра,
В рамках конструктивных признаков первой группы акселеро·
метры разделяются следующим образом;
-
по числу измеряемых компонентов ускорения;
по наличшо встроенных ДОПОЛIПlтельных устройств;
по способу мехаЮlческого соеДШIения основных элементов
или узлов КOHCТPyкцmt:;
117
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
-
по ВЬПIOJПIению вывода сигнала электромеханического пре­
образователя;
-
по способу крепления на контролируемом объекте,
Рис.
5.1. Классификация акселерометров
по :конструктивным признакам
118
5.1. Классuфюшцuя nЫЗQЭJIекmpuческux ахЕe:JIераW!lJlJЮ8
ПО числу измеряемых компонентов ускорения существуют
однокомпонентные и многокомпонентные (двух- и трехкомпо­
нентные) акселерометры, одновремешю измеряющие ускорение
в нескольких ортогональных направлеЮlЯX.
Многокомпонентные акселерометры делятся на конструкции,
содержащие:
-
отдельные независимые электромехаffilческие преобразова­
тели, размещенные в общем корпусе и ориентированные по :каж­
дому из измеряемых направлеlПlЙ ускорения;
-
один общий инерциOlПlЫЙ элемент, механически связанный
с отдельными пьезоэлементaшl, ориентированными по направле­
ЮIЯм составляющих силы, действующей со стороны инерцион­
ного элемента;
-
единый электромеханический преобразователь, одновремен­
но воспринимающий ускорения в заданных направлениях и гене­
рирующий соответствующие им электрические сигналы.
Акселерометры,
помимо
измерительного
электромехаffilче­
ского преобразователя, могут содержать также встроенные меха­
IПIческие,
элек.грические,
элек.гРOlПlые
и
электромеханические
дополнительные устройства,
К числу механических дополнительных устройств можно от­
нести, например, механический частотный фильтр, систему огра­
ffilчения перегрузки, системы газового IШИ жидкостного охлаж­
дения, компенсатор температурного расширения, К элеh.-ТРОННЫМ
устройствам относятся встроенные СУ и иные схемы первич­
ной обработки и преобразования электрического сигнала, Ха­
рактерными
примерaшl
электромеханических
дополнительных
устройств могут служить встроеlПlые пьезоэлектрические IШИ
электромагнитные калибраторы,
Способы механических соединений основных узлов и элемен­
тов пьезоэлектрического акселерометра имеют важное техноло­
гическое значение и определяют эксплуатационные свойства дат­
чика. Наиболее часто используются склеенные или упругоподжа­
тые соединения элементов преобразователя, Иногда встречаются
119
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
склеенные
с
одновременным
упругим
поджатием
соеДl-шения,
а также выполнеlПlые посредством пайки или сварки. При соеди­
неmш: элементов корпуса используется сварка или резьба, герме­
тизироваlПlая компаундом.
Вывод сигнала акселерометра электрически может быть вы­
полнен ДВ}'!-IЯ способами: когда один из элекrpодов (или группа
электродов одной полярности) пьезоэлемента соединен с корпу­
сом с использоваffilем коаксиального кабеля (неИЗОЛИРОВaIПlЫЙ
выход) или когда все электроды изолированы от корпуса, для чего
используется двух- или трехпроводный экранироваlПlЫЙ кабель
(изолированный выход),
Конструктивно вывод СИПIaла осуществляется посредством
разъема, установлешюго на основании или КРЬШIКе корпуса, либо
кабелем, неразъемно вмонтироваlПlым в корпус,
ПО способу креплеlПlЯ на контролируемом объекте больППlН­
ство конструкций акселерометров разделяется на две основные
группы: резьбового и клеевого креплеlПlЯ. Некоторые варианты
исполнения предназначены для иных способов креплеlПlЯ, напри­
мер через специальный переходной элемент с пазами, или имеют
постоянный мапшт, ВМОНТИРОВaIПlЫЙ в основание корпуса, Эти
и lПIые нетшrnчные способы креплеЮIЯ для упрощеlПlЯ класси­
фикации отнесены к специальным,
ПО конструктивным признакам второй группы акселерометры
разделяются следующим образом:
-
по классу ПfvI, из которого выполнен пьезоэлемент;
по типу преобразователя;
по виду деформации пьезоэлемента и рабочего пьезомоду-
ля;
-
по особенностям выполнеlПlЯ пьезоэлемента;
по особенностям выполнеlПlЯ lПIерционного элемента.
ПО классу ПfvI разделяются на МОНОII..1шсталлические и поли­
кристаллические (керамические) материалы,
Под термином ((электромеханический преобразователы) здесь
подразумевается узел датчика, состоящий из одного или несколь-
120
5.1. Классuфюшцuя nЫЗQЭJIекmpuческux ахЕe:JIераW!lJlJЮ8
ких
пьезоэлементов,
инерциоlПЮГО элемента,
вспомогательных
деталей (токосъеhiIНИКОВ, изоляторов и др.), осуществляющий
преобразование воздействующего ускорения в электрический
сигнал. Разделение типов электромеханических преобразовате­
лей проводится по особешюстям их конструкции И электричес­
кой схемы.
Конструктивно преобразоватeшI можно разделить на;
-
составные, отдельные элементы которых выполнены из раз­
нородных материалов, например IIJV[, электроизоляционной кера­
мики и металлов;
-
монокерам:ические,
все
элементы
которых
выполнены
из
ПКJv1 и соеДlПlены посредством сварки;
-
монолитные - выполненные в виде едlПlОГО блока из ПКМ,
Монокерамические и монолитные преобразоватeшI и акселе­
рометры на их основе подробно рассмотрены в главах
8 и 9,
Преобразователи акселерометров могут иметь симметричный
или несимметричный электрический выход относительно корпу­
са датчика, а также дифференциальную схему, пъезоэлемент кото­
рой состоит из двух электрически последовательно вкmoчеlПlЫХ
секций со средним: выводом.
ПО виду деформации пьезоэлемента и рабочего пьезомодуля
различаются конструкции преобразователей с деформациями
растяжения---сжатия (компреССИOlПlые), изгиба и сдвига, Преиму­
щественно в качестве рабочих пьезомодулей в них используются
dзз , dл и
d l5
соответствешю. В некоторых акселерометрах может
быть реализована смешанная деформация, например растяже­
ния---сжатия и сдвига одновременно.
ПО особенности ВЫПQЛнеЮIЯ пьезоэлементы делятся на од­
нослойные и многослойные. Многослойные пьезоэлементы, как
правило,
имеют параллельное электрическое
включеlПlе
слоев,
Независимо от количества слоев, пьезоэлемент может быть раз­
делен на секции, имеющие параллельное, последовательное или
смешаlПlое электрическое включение, При этом сеКЦИОIПlJювание
пьезоэлемента осуществляется путем разделения на отдельные
121
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
секции только его электродов или выполнением в виде совокуп­
ности отдельно расположенных его частей.
Сосредоточенный инерциоIПIЫЙ элемент выполняется в виде
отдельного функционального элемента конструкции электроме­
ханического преобразователя. У центрированного :инерционно­
го элемента, в отличие от нецентрированного, центр массы сов­
падает с центром массы пьезоэлемента, Роль распределеlПlОГО
инерционного элемента играет собствеШIaЯ масса пьезоэлемен­
та.
К особым конструктивным признакам акселерометров отнесен
ряд специфических особенностей выполнения, рассмотрение ко­
торых в общей :классификации сделало бы ее неоправданно гро­
моздкой,
Проводя классификацию акселерометров по теХЮlческим ха­
рактеристикам, следует отметить, что последние в значительной
степени определяются как конструктивньn.ш особенностями, так
и параметрами используемых конструкционных и пьезоактивных
материалов.
ТеХЮlческие
характеристики
акселерометров
укрупненно
можно разделить на метрологические (включая точностные)
и эксплуатаЦИOlПlые (рис,
5.2).
ПО метрологическим характеристикам акселерометры разделяются;
-
по степеЮl точности;
по рабочему диапазону частот;
по диапазону измеряемых ускореЮlЙ (динамическому диа-
пазону).
ПО степени точности акселерометры делятся на эталонные
и рабочие средства измереlПlЯ
[127],
Эталонные акселерометры
соответствующего разряда используются ДЛЯ калибровки вибро­
измерительной аппаратуры методом непосредственного CШlчения
[128, 129], Акселерометры,
относящиеся к рабочим средствам из­
мереIШЯ, используются в составе виброизмерительной аппарату­
ры различного назначения.
122
5.1. Классuфюшцuя nЫЗQЭJIекmpuческux ахЕe:JIераW!lJlJЮ8
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРОВ
Метрологичес~~ехарактеристики
1]
3ксплуатационныехараитеристиии
Степень точности
ЭталОННblе
Рабочие
Частотныйдивпвэон
НИJиочаСТОТliые
Ш~Jро,"Ополосные
ДиапэзонизмеряеМblхускорений
ВblСОКO'iУ8ствюельные
Рад~JационfЮ стойкие
'i
ПомеХОJаЩ~Jщенность
~
Обblчная
УСЛОВIIЯ применеН~JЯ
Лаfюраторные
п
мышленные
В,РЫ800пасные
Рис.
5.2. Классификация акселерометров
по технически:м
характеристикам
Разделение акселерометров по частотному и ДИНaJ\Шческому,
впрочем,
как и температурному диапазонам, не
имеет строгих
общепринятых понятий. Если исходить из совокупности техни-
123
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
ческих характеристик серийно Bьrnycкaeмыx изделий и задач из­
мереIШЯ параметров вибрации в различных областях техники, то
можно примеlПlТЬ используемые ниже критерии условного деле­
IПIЯ частотного, динамического и температурного диапазонов.
При определении рабочего диапазона частот следует руковод­
ствоваться верхней граlПlцей этого диапазона, поскольку ниж­
няя граlШца в основном зависит от свойств используемого СУ,
и не является объективной характеристикой конкретного типа
акселерометра, Кроме того, необходимо прmlИмать во внимание,
что верхняя граница рабочего диапазона частот, зависящая от зна­
чения частоты установочного резонанса
Ir"
определяется также
с учетом заданной частотной погреппlOСТИ и, обычно, лежит
в 1::::O~~~~~~' рабоче:му диапазону частот акселерометры
могут быть разделены на:
-
низкочастотные, работающие в диапазоне от долей герц до
нескольких десятков или сотен герц;
-
широкополосные
-
от нескольких герц до
5-1 О
кГц;
высокочастотные, с верхней грающей рабочего диапазона
частот более
10-15 кГЦ,
Динамический диапазон акселерометра зависит от его коэффи­
циента преобразования, определяющего шrnимальное значение
ускорения, и предельного уровня измеряемого вибрационного или
ударного ускореlПlЯ, В этой связи акселерометры, не имеющие
встроенных усилителей сигнала, с коэффщиентю.ш преобразова­
ния по напряжешпо илизаряду более 50-100],rВ·м- 1 ,с 1 илипЮаг 1 ,с 1
соответственно, MOгyr считаться высокочувствительными и пред­
назначенньn.ш для измереlПlЯ малых уровней виброускореIIИЯ,
Акселерометры, позволяющие IiThIерять виброускорения более
(1-5)104 M'C-1
или ударные ускорения более НУ
M·C-1 ,
относятся
к группе, предназначенной для измерения ускорений высокого
уровня. Остальные, наиболее широко распространенные ТИПЫ ак­
селерометров, по своим динамическим характеристикам занимаю­
щие промежуточное положеЮlе, являются широкодиапазонными,
124
5.1. Классuфюшцuя nЫЗQЭJIекmpuческux ахЕe:JIераW!lJlJЮ8
Существует естественная связь между частотным и динами­
ческим диапазонами. Согласно физическим закономерностям, ле­
жащим в основе работы акселерометров, высокочувствительные
акселерометры по своим предельным значениям рабочих частот
и ускорений уступают акселерометрам, предназначенным для ра­
боты в условиях высоких частот и амплитуд. ПО этим же при­
чинам последние имеют более низкие значеIПIЯ коэффициентов
преобразования
[130].
ПО эксплуатационным характеристикам акселерометры разделяются:
-
по рабочему диапазону температур;
по массогабаритным характеристикам;
по степеЮl защищенности от воздействия окружающей сре-
ды;
-
по общей помехозащищенности;
по условиям при:менеЮIЯ,
Рабочий диапазон температур акселерометров зависит, прежде
всего, от свойств ПМ, конструкционных материалов и конструк­
тивных особенностей. Исходя из предельной рабочей темпера­
туры, различаются акселерометры, предназначенные для работы
в диапазонах cpeДIlliX (обычно от минус
вышенных (до
250-400
70-40 до 80-140 ОС), по­
400-450 ОС) темпе­
ОС) и высоких (выше
ратур.
В ряде случаев необходима работа акселерометров в условиях
крайне Юlзких: температур вплоть дО минус
196
ос, Такие Юlзко­
температурные акселерометры ВЬПIOJПIЯются на основе специаль­
ных ПЮvl, обладающих относительно высокой стабильностью
характеристик при данных температурах,
ПО массогабаритным характеристикам акселерометры можно
разделить на:
до
МИЮlатюрные конструкции объемом не более
1-3
-
1 смЗ ,
массой
г;
малогабаритные
-
размером до
15-20
мм,
массой
до
15-25 г;
125
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
- среднегабаритные - размером до 30-50 мм, массой до
15<1-250 г;
- круmюгабаритные - размером более 50-70 мм, массой более
20<1-250 г.
ПО вполне понятным причинам, МИIПlатюрные акселерометры
характеризуются малыми значеIПIЯМИ КОЭффlЩиентов преобразо­
вания, а крупногабаритные
-
ffilЗКИМ значением частоты устано­
вочного резонанса.
Условия эксплуатации часто налагают определенные требо­
вания к защищенности акселерометров от воздействия окружа­
ющей среды. Наиболее общим требованием является защищен­
ность от проникновения пыли и влаги внутрь датчика, его разъем
и соединительный кабель. Для обычных условий эксплуатации,
например, в лабораторных или близких к ним производственных
условиях,
могут использоваться датчики в
пьшевлагозащищен­
ном исполнении, при котором герметизация корпуса осуществля­
ется резlПЮВЫМИ прокладками, компаундной заливкой или :кле­
евым соединением, Акселерометры, используемые длительное
время вне помещеЮlЙ, в условиях ПОСТОЯlПlого воздействия осад­
ков ИЛИ морской воды, должны иметь герметичный сварной кор­
пус и кабель с двойной резиновой оболочкой. Для эксплуатации
в химически активных средах допomштeльно предъявляются тре­
боваIПIЯ к химической стойкости КОНСТРУКЦИOlПlых материалов,
подвергающихся воздействию,
Особые требования предъявляются к датчикю,..I, работаюrцm.I
в условиях воздействия проникающих излучений, для достиже­
IПIЯ высокой радиационной стойкости в IПIХ могут применяться
только устойчивые к данному воздействию материалы.
При конструировании акселерометров всегда уделяется ВffiI­
мание СlllIЖению влияния на выходной сигнал помех различ­
ного характера, способных существеlПlО повлиять на точность
и достоверность результатов измерений. Как уже отмечалось,
наиболее часто источниками помех могут быть переменные
электрические и магнитные поля, токи в контурах заземления,
126
5.2.
Конcmpyкmивньщ цемы элeкmра\lехш/Uчet:ких npe06разовllТllEЛeU
пьезоэлектрических ахселераvempoв
деформации контролируемого объекта в месте крепления aKce~
лерометра и акустические поля. Повышенная помехозащищен~
ность датчика обеспечивается особенностями его конструктив­
ной и электрической схем, в частности ВЬПIолнеIПIем изолиро~
вашlOГО симметричного выхода ИmI дифференциальной схемой
пьезоэлемента.
ПО условиям применеЮIЯ акселерометры делятся на следую~
щие основные группы;
-
для лабораторного использования;
-
для промышленного применеЮIЯ;
-
для применения во взрывоопасных помещениях.
В БОЛЬППlнстве случаев эксплуатации в лабораторных услови~
ях пригодны акселерометры общего назначеЮIЯ,
Акселерометры для промышленного применения ОТШlЧaIQТCя
повьппенной механической и антикоррозийной прочностью кop~
пуса, надежностью крепления, ДОПOJПlительной защитой кабеля
и помехозащищенностью,
Во взрывоопасных условиях эксплуатации допускается при­
менение только датчико~преобразующей аппаратуры, прошед~
шей специальную аттестацmo на взрывобезопасность. Последняя
обеспечивается применеffilем внепrnих конструкционных матери~
алов, не вызывающих искрения при механическом воздействии,
и искробезопасных электрических цепей,
5.2. КОНСТРУII.."'Тивные
схемы электромехаиических
преобразователей пьезоэлектрических акселерометров
Рассматриваемые ниже наиболее распространеlПlые КOHCТPYК~
тивные cxehiIЫ пьезоэлектрических электромеХaJПIческих преоб~
разователей
[35, 62, 13 1] и их модификации используются в одно­
компонентных и некоторых многокомпонентных акселерометрах,
Естественно, что приведеlПlые здесь примеры не охватывают Bce~
го многообразия известных конструкций.
127
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
На рис.
5.3 изображены варианты схем с рабочей деформацией
растяжеIПIЯ--сжатия и клеевым соединением элементов.
о
Ц1lliтрuнврцuuлрвОDрэза8эmвля
~ - ~дПРiЮленuе nОЛЯРШc;Jен.чGсmu n,еЗOJпеменmэ
Рис.
5.3.
Конструктивные схемы компрессионных
прео6разователей с :клеевым соединением элементов:
1-
основание;
3-
2-
пьезоэлемент;
:инерционный элемент
Каноническая схема преобразователя (рис, 5.3а), работа ко­
торого уже анализировалась в главе
кового пьезоэлемента
1,
2,
состоит ИЗ одного дис­
расположенного между основаIПIем
и инерционным элементом
3,
2
Эти элементы имеют непосредс­
твенный электрический контакт с электродами пьезоэлемента,
в результате чего возможен только неизолированный от корпуса
и несимметричный выход сигнала, Так как центры масс пьезо­
электрического и инерционного элементов разнесены на неко­
торое расстояние и не совпадают с центром инерции преобра-
128
5.2.
Конcmpyкmивньщ цемы элeкmра\lехш/Uчet:ких npe06разовllТllEЛeU
пьезоэлектрических ахселераvempoв
зователя, такая конструкция является нецентрированной, что
способствует возникновению чувствительности к поперечным
и ротациоlПlЫМ колебаниям
[35].
К основным достоинствам
данной конструкции следует отнести сраШПlтельную простоту
изготовления и возможность достижения высокой резонансной
частоты акселерометра.
В преобразователе, изображенном на рис.
цишrnдрический пьезоэлемент
5.36, используется
1 с радиальным направлеlПlем по­
ляризованности (рабочий пьезо]"юдуль dЗI ).
РасположеlПlе электродов на образующих поверхностях пьезо­
элемента позволяет без использования ДОПOJПlительных изолято­
ров ВЫПОЛIПlть изолироваlПlЫЙ симметричный выход, что благо­
приятно сказывается на помехозащищенности датчика
[56, 111].
Выбор высоты, внешнего и внутреIПIего диш..Iетров пьезоэлемен­
та позволяет оптимизировать значения коэффициента преобразо­
вания и резонансной частоты. Такая конструкция также является
нецентрироваIПIОЙ.
В центрированных преобразователях с внепrnим (рис.
5.38)
и внутреннш..I (рис. 5.3г) расположением инерЦИОlПlого элемен­
та, приведеIПIые центры масс пьезоэлемента
элемента
3
1
и lПIерционного
совмещены с центром инерции преобразователя, что
способствует снижеmпo чувствительности к поперечным и ро­
тационным колебаниям. Обе изображенные конструкции имеют
неизолироваlПlЫЙ и несимметричный выход.
К общим недостаткам всех :клееных преобразователей следу­
ет отнести их невысокие прочность и надежность. Кроме того,
клеевые соединения отрицательно влияют на временную и тем­
пературную стабильность метрологических характеристик
[132].
Основными ДОСТОlПIствами являются простота их конструкции
и возможность выполнения акселерометров с МИlПIмальными га­
баритными размерами, благодаря чему они используются в лабо­
раторной практике.
Преобразователи с соединением элементов пайкой ИШI свар­
кой по конструкции аналогичны клееным.
129
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
На рис,
5.4 показаны
схемы наиболее характерных компресси­
онных преобразователей с упругим поджатием элементов,
,~
-
напрatJленuе раБО4ей оси а~Gелеромеmра,
0- ченmр vне!Щvv пре06Рa:JQ6~mепя
• + - Ц-"нmрышк:,; льезоомкmрuчeскосо и uН~t\LIOI'lЮзо~ем~mоо
~
Рис.
5.4.
-
напрооленvе поляршооанносmu льезоэлеменmа
Конструктивные схемы компрессионных
преобразователей с УПР}'ПIМ поджатием элементов:
1-
пьезоэлемепr;
элемент;
4-
2-
IШ1илька;
прокладка;
7-
основание;
3 - инерционный
5 - пружина; 6 - токосъемная
8 - изолятор; 9 - :корпус
винт;
Преобразователь с центральным упругим поджатием (рис.
5.4а) содержит два дисковых пьезоэлемента
тием; расположенных между основанием
ментом З; стянутых резьбовой ШIПШЬКОЙ
1 с осевым отверс­
2 и инерционным эле­
4 через пружину 5, На­
личие пружины стабилизирует УСIШие поджатия за счет компен­
сации разности теШIQВОГО распrnрения элементов конструкции;
а также необратимых деформаций резьбовых соединений, Съем
эле:rcrpического сигнала осуществляется через тонкую металли-
130
5.2.
Конcmpyкmивньщ цемы элeкmра\lехш/Uчet:ких npe06разовllТllEЛeU
пьезоэлектрических ахселераvempoв
ческую прокладку
6 между пьезоэлементам:и,
Наличие пары пье~
зоэлементов обеспечивает повьппение емкости и :коэффициента
преобразования по заряду в два раза, не требует применения изо~
лятора между пьезоэлементом и основанием или ннерционным
элементом при неИЗОЛИРОRaШIOМ несимметричном выходе. Рас­
смотренная конструкция преобразователя является нецентриро­
ванной,
В преобразователе, изображенном на рис.
поджатие осуществляется винтом
7
5.46,
центральное
без использования отдельно­
го упруго элемента, Конструкция дополнительно содержит два
изолятора
8,
обеспечивающих выполнение изолированного сим­
метричного выхода. как и в предыдущем случае, конструкция не­
центрированная.
Отсутствие пружины позволяет уменьшить высоту преобразо­
вателя и увеличить усилие поджатия его элементов, что способс­
твует повьппению предельного уровня измеряемого ускорения.
Однако возрастание жесткости стяжки, механически шунтирую­
щей пьезоэлементы, может привести к снижеШlЮ :коэффициента
преобразования до
Рассмотренные
20-30 % [133].
преобразователи
с
центральным
упругим
поджатием характеризуются достаточно высокой стабильнос~
тью метрологических характеристик, прочностью, надежностью
и технологичностью, что обеспечивает их пшрокое распростра­
нение,
К другой разновидности преобразователей с упругим поджа­
тием относятся конструкции, выполненные по так называемой
схеме тандем-датчика. Особенность работы данной схемы заклЮ­
чается в одновременной, но противоположной ПО знаку дефор­
мации пьезоэлементов, При этом нелннейности генерируемых
сиrnалов, возникающие при сжатии и растяжении пьезоэлемен­
тов, взаимно компенсируются, РасположеШlе элементов и осевая
симметрия конструкции также способствуют взаимной компен­
сации зарядов, возникающих в пьезоэлементах при воздействии
поперечных и угловых компонентов вибрации.
131
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
Вариант такого преобразователя с периферийным поджатием
(рис.
5.46)
содержит два пьезоэлемента
ffilМИ lПIерционный элемент
выми частями корпуса
9.
3,
1и
размещеlПlЫЙ между
сжатые через изоляторы
8
торце­
ИзображеlПlЫЙ преобразователь имеет
центрированную конструкцию и изолированный от корпуса диф­
фереIЩИальный выход сигнала, обеспечивающий эффективную
защиту от синфазных электромагнитных помех при использо­
вании соответствующего дифференциального СУ
[56, 110],
Воз­
можно также выполнение двухпроводного симметричного выхода
при последовательном электрическом соединеffilИ пьезоэлемен­
тов ИШI неизолированного от корпуса выхода при их параллель­
ном соединеffilИ. В последнем случае не требуется применения
изоляторов, а направление
BeIcrOpa
поляризованности одного из
пьезоэлементов должно быть изменено на противоположное.
В реальных условиях, особеlПlО при серийном производстве,
не всегда возможно подобрать пары пьезоэлементов с одинако­
выми характеристиками. Кроме того, механические напряжения
в пьезоэлементах несколько отличаются, так как послеДIШе опи­
раются на разные участки корпуса, имеющие не равные жесткос­
ти механических цепей относительно установочной поверхности
датчика и асимметрию по отношеffilЮ к внеШffilМ воздействиям
[134],
ОтмечеlПlые обстоятельства не позволяют в полной мере
осуществить компенсацию зарядов, вызванных неизмеряемыми
воздействиями, что, наряду СО сложностью конструкции, ограни­
чило широкое применение данной схемы,
РазработаlПlЫЙ в НКТБ «Пьезоприбор)) центрированный тан­
дем-преобразователь (рис, 5.4г) имеет одну общую опору для
пары пьезоэлементов
элементами
3,
1,
расположенных между lПIерционными
стянутыми шшшькой
4.
В данном случае, иден­
тичность опорных жесткостей пьезоэлементов и их центральное
поджатие благоприятно сказываются на взаимной компенсации
зарядов от неизмеряе:мых воздействий, в том числе и деформаций
06ъе:rcrа, Шшшькз не оказывает механического шунтирующего
воздействия на пьезоэлементы, так как при их рабочей деформа-
132
5.2.
Конcmpyкmивньщ цемы элeкmра\lехш/Uчet:ких npe06разовllТllEЛeU
пьезоэлектрических ахселераvempoв
ции отсутствует перемещеIШе
инерционных элементов относи­
тельно друг друга. как и в предыдущей конструкции, возможно
применение дополнительных изоляторов и реализация всех вари­
антов выхода сигнала и коммутации пьезоэлементов,
Использоваffilе пьезоэле:rcrpических преобразователей с де­
формацией изгиба (рис,
5,5)
позволяет значительно повысить ко­
эффициент преобразования, преимуществеmlO по заряду, при ма­
лых массах и габаритных размерах акселерометров в диапазонах
IПIзких и среДIШХ частот. для этой цели применяются биморфные
ИШI униморфные элементы (см. главу
1)
с консольным, перифе­
рийным или центральным закреплением,
- наllравланuе рабочей оси амсеп&ромаmра; о - ~eHmp иHep~ии прообразоваmвля
• + - ~eнтpы масс nЬеЗOOJlекmРI1ЧiJCJ(ООD и иHepциDНHOOO элементов coomsemClJl8eHHQ.
.~
~-наnравлеНU&ПDПярuзованносmUЛЬезоэпеменmа
Рис.
5.5. Конструктивные cxeIl.[ы изгибных прео6разователей:
1 - пъезоэлемеIП; 2 - основmше; 3 - инерционный элемент;
4 - балка; 5 - стойка; 6 - пластина; 7 - винт; 8, 9 - опора;
10- ШIастина с инерционными элементами
Простейший нецентрированный преобразователь (рис, 5.5а)
состоит из балочного бш.юрфного или униморфного пьезоэлемен­
та
1, консольно
закрепленного на основании
2,
С целью повьnпе-
133
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
ния КОЭффlЩиента преобразования за счет СlПlжения резонансной
частоты и прочности, на свободном КОIЩе пьезоэлемента может
быть ДОПОЛlПIтельно помещен инерЦИ:oIПlый элемент
3,
Выбор
отношения ДШПlЫ к толщине изгибного и массы инерционного
элементов позволяет в широких пределах реГУШIpовать эти харак­
теристики
[137],
В близком по устройству и принципу работы преобразователе
(рис,
5.56)
для повышеffiIЯ прочности к воздействшо перегрузок
используется металлическая балка 4 с приклеенным пьезоэлемен­
том
1в
зоне ее максимальных мехаlПlческих напряжений, возни­
кающих при изгибе,
Преобразователи с балочными консольно закрепленными из­
гибными
элементами находят применение
преимущественно
в акселерометрах, предназначенных для измерения виброускоре­
lПIй малого уровня в низкочастотном диапазоне. их характерным
недостатком является высокая чувствительность к ротационным
колебаниям, ВОЗIШкающая из-за нескомпенсированности вызван­
ных ими деформаций.
В центрированной конструкции преобразователя (рис,
5.58)
периферийное закрепление балочного или дискового изгибного
элемента
1 осуществляется посредством упругих стоек 5, обеспе­
чивающих возможность свободного изгиба пьезоэлемента в осе­
вом направлении. При использовании дискового элемента стойки
равномерно распределены по его контуру.
С точки зрения эффекrnвной реaшIЗaцmt: пьезоэффеrcrа, приме­
нение дискового изгибного элемента более рационально по сравне­
mпo с балОЧIllillvl, так как позволяет получить двуосное напряжен­
ное состояние в пьезоэлементе (см. рис,
1,8). При этом, суммарный
заряд сщдается за счет механических напряжеIШЙ, действующих
как в радиальных, так и в кольцевых сечеlПlЯX
[136].
Иной вид периферийного закрепления изгибного элемента
(рис, 5.5г) реализован в преобразователе с тонкой армирующей
металлической пластиной
6,
вклеенной между двумя дисковыми
пьезокерамическими плаСТШIaМИ
134
1,
Выступающий край пласти-
5.2.
Конcmpyкmивньщ цемы элeкmра\lехш/Uчet:ких npe06разовllТllEЛeU
пьезоэлектрических ахселераvempoв
ны защемлен по контуру в основании
2
:корпуса акселерометра,
Наличие армирующей пластlПIЫ повьппает вибропрочность пье­
зоэлемента, В рассматриваемом примере преобразователя, имею­
щего центрированную конструкцию и неизошqJOВанный от кор­
пуса выход, отсутствует отдельный (сосредоточеIПlЫЙ) lПIерци­
ОIПlЫЙ элемент. Как и в других подобных случаях, его функцию
выполняет распределенная масса изгибного элемента,
Система периферийного закрепления изгибного элемента ока­
зывает определеlПlое ВШlЯние на характер его деформации, в той
или иной степеffil преnятcтвуя свободному изгибу под воздей­
ствием ускорения, С одной стороны, это отрицательно сказыва­
ется на эффеIcrИВНОСТИ работы преобразователя, а с другой
-
на
стабильности его метрологических характеристик. ПраIcrическая
реализация качественного периферийного закрепления сопря­
жена с рядом сложностей технологического характера, В связи с
этим. наиболее широкое распространение среди преобразовате­
лей с деформацией изгиба получили конструкции с центральным
закреплением пьезоэлемента.
Преобразователь (рис, 5.5д) состоит из биморфного пьезоэле­
мента
рами
1, закреплеlПlОГО в центральной части винтом 7 между опо­
8 и 9, ИзменеЮlе диаметра опор позволяет, в определенных
пределах, регулировать коэффициент преобразовaJПiЯ. Конструк­
ция центрирована, обладает малой чувствительностью к неизмеря­
е:мым воздействиям, проста и технологична. Использование допол­
IПIТeльных изоляторов между пьезоэлементом и опорами дает воз­
можность выполнения изошqJOВанного от корпуса симметричного
выхода, В данном случае, для нор:мирования коэффициента преоб­
разования осуществляют подбор только диаметра изоляторов.
у преобразователя, выполненного по, так называемой, грибо­
образной схеме, (рис, 5.5е) дисковый пьезоэлемент
к металлической пластине
1О
1
приклеен
с расположенной по ее периферии
группой инерЦИОlПlых элементов. ПлаСТlПlа жестко связана с ос­
НОВaIшем
2
посредством центрального цилиндрического высту­
па, который препятствует передаче пьезоэлементу деформаций
lЗ5
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
со стороны основaJШЯ. Существенный недостаток данной конс­
трукщш:, характерный для всех преобразователей с унmюрфными
элементю,ш, связан с различием КЛТР используемых в них разно­
родных :материалов. это вызывает ДОПОJПIительные меxaIOlЧеские
напряжеlШЯ при изменеШlИ те:шrерarypы
[120] и отрщательно ска­
зывается на стабюrьности метрологических харaI\.."Тe]JИСТИК,
Вследствие аСи:м1vIетрии изгибного и JПlерционного элементов,
рассмотренная :конструкция является нецентрированной, Однако
центрирование может быть получено при использоваIШИ бимор­
фного элемента с армирующей пластиной и симметричного инер­
ЩlOнного элемента,
Преобразователи с деформацией изгиба характеризуются не­
высокими значенит.rn резонансной частоты и прочностью к воз­
действmo ус:корения, что ограничивает области их применения.
К положительным качествам некоторых :конструкций, кроме уже
упомянyroй возможности достижеlШЯ высоких значений коэффи­
циента преобразоваЮIЯ, можно отнести их простоту, технологич­
ность, малую чувствительность к неизмеряемым воздействиям,
а также относительно простой способ регу1ШрОваЮIЯ :коэффщи­
ента преобразования или частоты резонанса.
Еще один вариант, который условно может быть отнесен
к преобразователям с деформацией изгиба (рис,
5.6), представлен
:конструкцией, выполненной по схеме, названной авторами разра­
ботки «поворотною}
[116, 137],
Преобразователь содержит пьезоэлемент
1
в виде диска
с разнонаправленной поляризованностью двух его половин, рас­
положеlПIЫЙ между основанием
стянутыми шпилькой
4.
2
и инерционным элементом З,
для получения симметричного изоли­
рованного выхода используются изоляторы
прокладки
6.
5
и то:косъемные
Преобразователь имеет нецентрированную :конс­
трукцию, За счет образования рычага второго рода может быть
увеличено результирующее механическое напряжение в пьезо­
элементе и, следовательно, повышен коэффициент преобразова­
ния пропорционально отношению
lЗ6
l/r, где 1- расстояние от осно­
ваlШЯ пьеЗОЗЛе:\fента до центра массы ин:ерпионного З.:Iе~iента;
r - радиус пьезоэле~tента. Как и все близкие по пршщипу рабо­
ты конструкции с консольным изrnбным элементом, рассмот­
ренный преобразователь должен И},rеть ВЫСОКУЮ чувствитель­
ность IC ротациошlыIvf колебаниm.r.
:;
А.
6
5
- НоПРdеПЩlllе рМ50ч",u l)GI! fI,"у:пер(!м",mр~:
<:) - ц<Онmр lIH~PljUU nр&обраJоваmсп~
Рис.
5.6.
Конструктивная схема «поворотного»
преобразователя: а
6-
-
I(ОНСТРУКЦИЯ;
распреДелею[е меХЗЮJЧеСКИХ напряжеmri'i
по сечеюпо ПЬезоэлемента;
2-
основаНИе;
3-
1-
ПЬеЗОЭЛемент;
IШерЦИОННЫЙ элемент;
4-
шrnшька;
6-
ТОКОСЪеМНая прокладка
5-
изолятор;
Преобразователи С деформацией CДВlIГa (рабоЧJri'i пьезоJ\..Ю­
дуль
d1S )
ЯВЛЯЮТСЯ наиболее совершенными и по сравнению
с компрессионными IФНСТРУКЦЮThШ имеют ряд преимуществ
[116,
138 140];
- Rblcoкoe
собс­
отношеfше коэффrщиента преобразования
ТRСННОЙ массе преобразоватеrur за счет большего (в
/l,J/Я ПКN.I системы ЦТС значешlЯ пьезомодуля
dlS
f(
1,3-1,6
раза)
по сравнеIШЮ
сdзз ;
[37
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
-
меньшую чувствительность к неизмеряемым воздействиям,
включая поперечные колебаIПIЯ, деформации обье:rcrа, акустичес­
кие поля, резкие перепады температуры и ДР.;
-
меньший эффе:rcr нешrnейности при высоких уровнях уско­
реlПlЯ;
-
более высокую временную стабильность метрологических
характеристик,
Типичные схемы сдвиroвых преобразователей показаны на
рис,
5.7,
Все изображеIПIые конструкции
-
центрироваIПIые
и имеют неизолированный несимметричный выход, хотя пршщи­
mшльно возможно ВЬПIолнение и изолированного симметричного
выхода при использовании дополнительных изоляторов
- направление рабочей оси акселерометра;
•+-
А
[116],
0- Цel-lтр Ul-lарцuu преобразоеэтещ
цеl-lтры масс пьазоэлектpiJЧ{Jского и u!!еP4J.Юl-I!!ого ЭЛ&!eI-Iтое сооmeаmcmвel-l!Ю:
,.. -
Рис.
щmРООЛelше IЮЛЯРUЗООiJ/IНОcmu пьезоэлемВШflд
5.7. Конструктивные схемы СДВИГQвых
1 - пьезоэлемент; 2 - основание;
преобразователей:
3-
:инерционный элемент
Преобразователь (рис,
зоэлемента
1с
направлением
5,7а)
содержит два прямоугольных пье­
продольным, относительно IШоскости электродов,
поляризованности, расположеIПIЫХ
с
противопо­
ложных сторон выступа основаlПlЯ
2,
элементы
ПО такой схеме выполнены
3,
стянутые ШШlЛькой
акселерометры типа
138
((Isoshear»
4.
и внешние инерционные
фирмы (вндевко)),
5.3. Конструктивные и ЗNEnлyamaцuо//Ные особeюшcmи mРexlШ}lIIОНJ!mnных
nЬe:юзJlexтpuчecкux UNEелеро,}/emров
Примером
преобразователя
инерционного элемента (рис,
с
внутренIШМ
5,76)
с основаЮlем корпуса
ный элемент
3,
расположением
может служить :конструкция
с двумя прямоyroльны:ми пьезоэлементами
1, жестко
связанными
2, между которыми расположен
инерцион­
Подобная схема лежит в основе акселерометров
конструкцШI (Тheta
Shear»
фирмы <d)рюль и Къер)), Известны
аналогичные :конструкцШI преобразователей с ЦИШlНдрическими
пьезоэлектрическим и инерционным элементами
[141],
Элементы преобразователя, изображеююго на рис,
ют цишrnдрические
[138]
ИШI конические
[142]
5.76,
име­
сопрягаемые по­
верхности. Небольшая :конусность за счет фИЮlIШIой обработки
элементов позволяет обеспечить их более плотное прилегание
при менее жестких допусках к посадочным размерам, Подобная
схема
используется, например, в
«Annular Shear»
конструкциях акселерометров
фирмы ((Брюль и Къер)).
Для реa.JШзации основных преимуществ
преобразователей
с дефор:мацией сдвига требуется предельно точная обработка эле­
ментов конструкции и применеIШе высококачественных по меха­
Юlчески:м и электрофизичес:ким параметрам пьезоэлементов.
5.3. Конструктивные
и Эh."'Сплуатационные особенностн
трехкомпонентных пьезоэлектрических акселерометров
Для определения значения и направления в пространстве век­
тора виброускореIШЯ необходимо одновременное измерение трех
его составляющих ИШI их проекций на три ортогональные оси
заданной системы координат, что особенно важно в условиях
нестационарной пространствеююй вибрации
[143].
Для этой цели используются либо три OднoКOМIIoHeнтныx
акселерометра,
установленные
на
одном
переходном
элементе
и ориентированные рабочими осями в ортогональных направле­
ниях, либо специальные трехкомпонентные (треХКООРДIПIaтные
или трехосевые) акселерометры (рис,
трукции
таких
акселерометров
5.8),
ТрадИЦИOlПlые конс­
содержат три
независи:мых
од-
139
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
нокомпонентных преобразователя с ортогональной ориентацией
рабочих осей, размещеlПIЫХ в общем корпусе.
При использовании трех
отдельных акселерометров (рис,
5.8а), на КОНТРО1Шруемом объе:rcre
1в
точке, условно принимае­
мой за измерительную, закрепляют переходной элемент
2
в фор­
ме :куба с установленными на трех его гранях однокомпонентны­
ми акселерометрами З, оси чувствительности которых ориенти­
рованы ортогонально в соответствии с выбранны:м::и осями Х, У,
z
системы координат,
,~ -наЛР8iJленuе рабочей оои акселерометра,
О - центр инерции преQбp<JЗQlJателя;
центры
Mi1<-""C пьеэоолектриче.жООiJ u uнepциOHHOOO
~ -наПР8iJМНU8ЛQлярuэоедННQстUПЪ8J()JJJеI.l8нта
Рис.
5.8, Расположеmте цeнrpOB чувствительности
и направления осей измерения преобразователей
треХКОМПQнентных измерительных систем
Если акселерометры установлены в центре граней куба, то,
:как видно из рис,
5.8,
направление осей чувствительности трех
акселерометров имеют общую точку пересечения, лежащую
в геометрическом центре .куба и не совпадающую с измеритель­
ной точкой контролируемого объекта, Эта точка пересечения осей
чувствительности является мнимым центром чувствительности
треХКОl\Шонентной измерительной системы или трехкомпонент­
ного акселерометра, есШl его преобразоватeJПI расположены ана-
1'"
5.3. Конструктивные и ЗNEnлyamaцuо//Ные особeюшcmи mРexlШ}lIIОНJ!mnных
nЬe:юзJlexтpuчecкux UNEелеро,}/emров
логичным образом. Примерами таких акселерометров являются
датчики АНС
258 [39]
и АПЭ-3
[144],
состоящие из трех незави­
симых пьезоэлектрических преобразователей, установленных на
общем основаЮlИ внутри корпуса.
Некоторые трехкомпонентные акселерометры с целью МlПIи­
мизации массогабаритных характеристик выполнены так, что
оси чувствительности их преобразователей не имеют общей точ­
ки пересечения (рис.
4326
5.86).
например акселерометры ТШlОв
ИШl4504 фирмы «Брюль и Къер}}
4321,
[145],
При обработке сигналов считается, что значение И фаза сигнала
каждого акселерометра соответствует составляющей результиру­
ющего
Be:rcropa виброускореIПIЯ в направлеШlИ соответствующей
рабочей оси, Векторным суммированием сигналов определяется
модуль результирующего
Be:rcropa
ускорения и
его
направлеЮlе
в системе координат,
как в случае применения трех отдельных акселерометров, так
И при использовании традиционных трехкомпонентных, центры
чувствительности преобразователей обязательно располагают­
ся в трех Рaз.mIчных точках пространства. то есть имеются три
измерительные точки с несовпадающими координатами.
При
сложном характере вибраций это может привести к ДОПOJПlи­
тельным опrnбкам измереIПIЯ за счет фазовых рассогласоваШlЙ
И чувствительности к поперечным колебаниям каждого из отде­
льных преобразователей
[5, 36],
Трехкомпонентные акселеромет­
ры, имеющие действительный общий центр чувствительности,
внекоторой степеЮl свободны от названного недостатка. Однако
несовпадеШlе общего центра чувствительности с выбранной точ­
кой измерения на поверхности контролируемого объекта может
явиться еще ОДЮlм фактором, отрицательно влияющим на точ­
ность измереIПIЯ ускорений пространственной вибрации
[146],
Существуют способы приведения центров чувствительности
по трем
OCfil
измереIПIЯ к одной общей точке, которую можно
с той или иной степенью точности считать действительным об­
щим центром чувствительности. Наиболее эффективно исполь-
141
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
зование трех отдельных пьезоэлементов (или групп пьезоэлемен­
тов ), связанных с одним общим lПIерционным элементом, или
применение единого преобразователя с тремя выходами сипш­
лов, пропорциональных действующим в заданных направлеIШЯX
составляющим ускорения. Ниже рассмотрены прш.Iеры выполне­
ния акселерометров с общим центром чувствительности.
Трехкомпонентный акселерометр (рис.
5.9) [5, 147]
содержит
симметрично расположеlПlые на кубическом основamш
1
три
пары независимых однокомпонентных преобразователей с рабо­
чей деформацией растяжения---сжатия, состоящих из пьезоэлемен­
тов
2,
на кoropыe для повышеЮIЯ коэффициента преобразования
допomштельно может быть установлен lПIерционный элемент
3,
Противоположные пьезоэлементы :каждой пары соеДlПlены меж­
ду собой параллельно,
Рис.
5.9. Схема трехкомпонеlПНОГО
акселерометра с тремя парm.rn
преобразователей
Таким образом, каждая пара преобразователей имеет общий
действительный центр чувствительности, практически лежа­
щий в геометрическом центре основания. для достижения этого
необходимо выполнение следующих условий: коэффициенты
преобразования :каждого из преобразователей в паре должны
быть одинаковыми и иметь малые значения ОКПП; верхняя гра­
ница рабочего диапазона частот не должна превышать частоту,
142
5.3. Конструктивные и ЗNEnлyamaцuо//Ные особeюшcmи mРexlШ}lIIОНJ!mnных
nЬe:юзJlexтpuчecкux UNEелеро,}/emров
при которой будут возникать заметные ю.ШШlтудные и фазовые
рассогласования ускорений. действующих на инерционные элементы,
в таких акселерометрах. кроме компрессиOlПlЫХ, используют­
ся преобразователи с деформацией сдвига или изmба, имеющие
более высокие точностные показатели
[146],
5.10) [148]
Трехкомпонентный акселерометр (рис,
общего инерционного элемента
1,
состоит из
жестко соеДlПlенного через
изоляторы
2 с шестью попарно ВКЛIOченны:м:и пьезоэлементами 3,
установлеIПIЫМИ внутри корпуса 4,
Рис.
5.10. Схема компрессионного
треХКОМIIоненпюго акселерометра
с 06щи:м :инерционным элементом
Существенным недостатком такого акселерометра является
закрепление его пьезоэлементов на участках корпуса. имеющих
разное
пространственное расположение и
неодинаковую
жест­
кость относительно установочной поверхности, Следовательно,
имеет
место
неПОJПlOе
совпадеIШе
центров
чувствительности
по каждой оси измереlШЯ с точкой пересечения осей симметрии
пьезоэлементов, Кроме того. неизбежно взаимное мехаЮlческое
шунтирование со стороны каждой из пар пьезоэлементов, отри­
цательно ВШlЯющее на коэффициент преобразоваЮlЯ,
Близкой по ПРИIЩИПУ действия является конструкция сейсмо­
метрического акселерометра (рис,
5,11)
с одним общим инерци-
143
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
онным элементом
1,
связанным с тремя парами прямоугольных
биморфных пьезоэлементов
2,
закрепленных в корпусе (на ри­
сунке не показан) струнными подвесами
Рис.
3 [149],
5.11. Схема изгибного
трехко:мпоненпюго акселерометра
с общим инерционным элеменroм
Значительная гибкость струнных подвесов и биморфных эле­
ментов, с одной стороны, снижает их взаимное мехаЮlческое
шунтирование и ВЛИЯЮlе различий жесткостей корпуса в местах
крепления струнных подвесов, а с другой - приводит К СlПIЖенИIO
собственной частоты и вибропрочности, как и в предыдущем
случае,
разное
пространствешюе
расположеlПlе
точек
закреп­
леlПlЯ подвесов, по-видимому, не позволяет реализовать полное
совмещеffilе центров чувствительности,
Конструкция акселерометра с общим инерционным элемен­
том, изображенная на рис,
5.12 [137, 150],
треХКОl\Шонентным аналогом датчика,
ротною) схеме (см. рис,
по существу является
выполненного
по ((пово­
5,6).
Акселерометр имеет нецентрированную конструкцmo и со­
держит три пьезоэлемента
1, 2,
З, генерирующих СIП'НaJIЫ при
воздействии ускорения по осям х; У и
элементы и изоляторы
4,
и инерционным элементом
зоэлементы
144
1 и 2,
Z соответственно. Пьезо­
5
6, стянуты шrшлькой 7, Дисковые пье­
расположенные между основаЮlем
с разнонаправленной поляризованностью двух
5.3. Конструктивные и ЗNEnлyamaцuо//Ные особeюшcmи mРexlШ}lIIОНJ!mnных
nЬe:юзJlexтpuчecкux UNEелеро,}/emров
половин, ориентированы с поворотом по оси на угол
элемент
3
Пьезо­
900.
имеет однонаправленную поляризованность по всему
объему и работает как обычный компрессионный элемент.
h
у
Рис.
5.12. Схема трехко],шоненrnого акселерометра
с тремя пьезоэлементЩl.Ш и общим инерционнЬTh[
Очевидно, что из-за расположения пьезоэлементов на разных
расстояниях от основания и инерционного элемента, центры чувс­
твительности ПО каждому направлеlПlЮ измереЮIЯ не совпадают
и разнесены по оси
Z примерно
на такие же расстояЮlЯ,
КОНСТР)'R"I'ИВная схема акселерометра модели
«Брюлъ и Къер))
[151, 152]
4506
фирмы
содержит единый треХКОМIIонентный
пьезоэлектрический преобразователь с общим центром чувстви­
тельности (рис,
5,13),
Преобразователь (рис, 5,13а) с рабочими деформациями сдви­
га по трем направлениям измерений содержит инерционный
элемент
1,
распложенный внутри кольцевого пьезоэлемента
2
с электродами на образующих поверхностях, Внешний электрод
разделен на четыре продольные секции, к каждой из которых
стяжным кольцом
3
прижаты сегментные пластины
ленные на контактах опорах
5и
4,
установ­
создающие в секциях пьезоэле­
мента деформации сдвига по соответствующим осям измереlПlЯ
(рис.
5.13, 6).
145
Пава
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu вЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
L.
у
б
Рис.
5.13. Схема трехкомпоненrnого акселерометра модели
4506: а - конструкция преобразователя; 6 - xapllli.Tep
деформации пьезоэлеменrа
Составляющие ускорения по каждой из осей измереIШЯ вы­
числяются соответствующей обработкой СIШмаемых с электро­
дов сигналов электронной схемой, размещенной в основаIШИ
Аналогичную
4524
cxeI\.ry построеIПIЯ имеет
[153, 154] с внешЮlМ
этой же фирмы
6.
акселерометр модели
электродом пьезоэле­
мента, разделенным на три сеКЦJПI.
На рис,
5,14
приведена конструктивная схема трехкомпонент­
ного акселерометра с единым трехкомпонентным преобразовате­
лем, имеющим общий центр чувствительности
[155, 156],
Преобразователь акселерометра состоит из пьезоэлемента
1
(рис.
5.14)
в форме прямоугольного параллелепипеда с :квад­
ратным основанием, на противоположные граIПI которого нане­
сены три пары электродов
146
2, 3
и
4
с присоединенными к ним
5.3. Конструктивные и ЗNEnлyamaцuо//Ные особeюшcmи mРexlШ}lIIОНJ!mnных
nЬe:юзJlexтpuчecкux UNEелеро,}/emров
выводами
ложку
6
5.
Пъезоэлемент приклеен через изолирующую под­
к основанию
7.
Вектор поляризованности РО пьезоэле­
мента ориентирован перпендикулярно его плоскости крепления.
Схемы, поясняющие работу такого акселерометра, приведены
на рис.
5.146.
?~li::2
f3
+
y ..
/.~
<,
lа.
Рис.
5.14. Схема треХКО:ЮIQненrnого акселерометра
с преобразователем в форме прямоугольного
параллелеrnmеда: а
-
конструкция преобразователя;
б - характер деформаций пьезоэлемента
С целью повьппения коэффициентов преобразования к свобод­
ной грани параллелешшеда, параллельной плоскости креШIения
пьезоэлемента, может быть дополнительно приклеен инерцион­
ный элемент (на рис.
снижается
частота
5.14 не показан).
установочного
Естественно, что при этом
резонанса
и,
следовательно,
верхняя граница рабочего диапазона частот.
При теоретическом рассмотрении работы акселерометра из
матрщы пьезомодулей ПЮv1
вектора виброускореlПlЯ
(1.2)
следует, что при направлении
az вдоль оси Z (рис. 5.146) возникает де147
nа8а
5.
КnНйllpyкmutmыe схЕ,\/ы и особеююстu 8ЫnOllJjef/UЯ nьезоэлexmpuческ1/Х
mocелеро,\/еmРО8
формация растяжения--сжатия в продольном направлеюlИ, заряды
генерируются за счет пьезо],юдуля dзз только на элеюродах пьезо­
элемент:!, перпендикулярных этой оси, При направлеlПlИ вектора
виброускореlПlЯ а по оси Х сдвИГQВая составляющая деформации
приводит к ВОЗIПI~овению зарядов за счет пьезомодуля dl5 только
на элеюродах, перпендикулярных оси Х Аналогичный результат
имеет место при воздействии ускорения а
в направлеlПlИ оси У,
ОсобеlПlОСТЬЮ рассматриваемой конс.;рукции акселерометра
является необходимость применеlПlЯ трех отдельных СУ с изоли­
рованными и не связанными между собой симметричн:ьn.rn: вхо­
дами
[157],
Использование общей точки для пар электродов не­
допустимо, так как приводит к перere:каншо зарядов со стороны
соседlПlХ каналов через межэлеюродную емкость пьезоэлемента,
Для исключения взаимного ВЛИЯIПIЯ сигналов каждого :канала че­
рез межэлеюродные емкости и снижеlПlЯ О:КПП необходимо соб­
людеlПlЯ равенства емкостей между соседними электродами.
Кроме того, различие типов рабочих деформаций пьезоэле­
мента в продольном и поперечных направлеlПlЯX, а также ВОЗlПIк­
новеlПlе дополнительной деформации изгиба при воздействии
ускореlПlЙ по осям должно приводить К Heкoropoмy несовмеще­
ншо центра чувствительности по оси
Z
относительно совпадаю­
щих центров чувствительности по осям Х и У, это несовмещеlПlе
может возрастать с увeшrчением отношения высоты к поперечно­
му размеру пьезоэлемента или массы инерционного элемента,
Общими недостатками рассмотренных трехкомпонентных ак­
селерометров с единым преобразователем является существешюе
разШlчие
эксплуатациоlПlЫХ
и
метрологических
характеристик
по направлеlПlЯМ осей измерения, а также сложность изготовле­
ния. Основное преимущество по сравнеlПlЮ с другими типами
акселерометров с общим центром чувствительности
массогабаритные характеристики,
148
-
меньпrnе
ГЛАВА
6
СПОСОБЫ КРЕПЛЕНИЯ АКСЕЛЕРОМЕТРОВ
для измерения параметров вибрации с МШlимальной погреш­
ностью установка акселерометра не должна влиять на динами­
ческие характеристики контролируемого объе:rcrз, а движения
объекта и акселерометра, в месте его крепления, ДОЛЖНЫ быть
полностью идентичными, Также не ДОЛЖНО иметь место допQЛ­
Юlтельное ограничение дmшмического и частотного диапазонов
акселерометра,
Заметные изменения меХ3Ю1ческих параметров колеблюще­
ГQСЯ тела наблюдаются в случаях, когда меХ3Ю1ческий импеданс
акселерометра соизмерим с собственным импедансом этого тела.
Частота резонанса элемента конструкции объекта
f. • на кото­
ром установлен акселерометр массой т , может быть ~цeHeHa ПО
формуле [62]
•
f. =
rдe
1, -
f,~ т,:'m.'
(6.1)
частота резонанса элемента КQНСТРУКЦШl без акселеро­
метра;
~~;=к~Л::Я~еК:~:;=:~а МОЖНО не учитывать, если
его масса вместе с крепежным приспособлеlПlем в
10-20
раз
меньше массы детали, на которую он установлен. Аналогичные
требоваIПIЯ предъявляются при установке акселерометров на тон­
кие стенки оболочечных конструкций, Например, при установ­
ке на металлический лист ТОЛЩlПюй
1
мм, согласно расчетным
данным, допустимая масса акселерометра не должна превышать
1,3-1,5 г.
Динамический диапазон ОГРaJПIчивается пределом прочности
соединения акселерометра с объе:rcroм и стабильностью механи-
149
Лlава
6.
спосоБы креТUll!llUЯ ата:елеJЮМemров
ческих свойств этого соединения под воздействием механиче­
ских нагрузок, Ограffilчение частотного диапазона проявляется
в
тех
случаях,
:когда
продольная
или
поперечная
резонансная
частота установлеlПlОГО акселерометра СIПIЖaется по сравнеlШЮ
с паспортным значением, что вызывается недостаточной жест­
костью соединения,
РасположеlШе мест креплеlПlЯ акселерометров определяется
исходя из целей и задач измереlПlЯ и конструктивных особеннос­
тей КОНТРОШIpуемого объеIcrа, влияющих на характер распростра­
неlПlЯ меХaJПIчес:ких колебаний. Следует избегать размещения
датчиков в местах, совпадающих с узловыми точками колебаЮlЙ,
характеризующим:ися максимальными механическими напряже­
IПIЯми и способными вследствие чувствительности акселеромет­
ра к деформации вызвать искажения выходного сигнала, Кроме
того, промежуточные элементы, расположенные между объектом
и датчиком, приводят к СlПlжению частоты его установочного ре­
зонанса или могут иметь свой собственный резонанс, лежащий
в диапазоне частот измеряемых колебаний.
При установке следует ориентировать корпус акселеромет­
ра так, чтобы его ось максимальной чувствительности (рабочая
ось) совпадала с направлеlПlем измеряемого виброускорения,
а направление минимальной чувствительности к колебаниям в
поперечном направлеIШИ совпадало с их направлением,
При выборе способа креШIения необходимо предварительное
сопоставление требуемых метрологических характеристик акселе­
рометра с реально достижимыми для каждого :конкретного случая
применения, с учетом рекомендаций изготовителя, Подробные ис­
следования различных способов крепления акселерометров прове­
дены фирмой <<Брюль и Къер))
[62,94,158],
а полученные выводы
и рекомендации широко используются на практике
[159, 160],
Наиболее распространены способы креплеlПlЯ акселерометров
с использованием резьбового соединеlПlЯ, приклеИВaIШЯ и магни­
та. Иногда прш.Iеняется мехаIШческое поджатие и редко вакуум­
ное креШIение. При любом из названных способов, :кроме при-
150
Пава
6. CJtDCQi)bl крепления акселерометров
клеивания, для повышеЮIЯ контаll.."I'НОЙ жесткости рекомендуется
покрывать сопрягаемые поверхности тонким слоем :консистент­
ной смазки,
Основные варианты резьбового креШIеЮIЯ акселерометров по­
казаны на рис,
6,1,
'&!1
2
'3
"""
6,
2
'&.'i:'
'tfr':
2
2,
-5
W
7~,
:,:1
,
:
,'"
Рис.
,
, _4
2
~
'
6.1. Варианты резьбового креШIения акселерометров:
1 - акселерометр; 2 - :кошролируемый объект;
4, 6, 7 - винт; 5 - резьбовой выступ
резьбовая шmшька;
3-
Участок поверхности объекта в
месте установки акселе­
рометра должен быть тщательно подготовлен и иметь размер
в
1,5-2
раза больше его основaJПlЯ, для достижения качествен­
ных результатов измерения необходимо соблюдать следующие
требования:
-
среднее арифметическое отклонение профиля от
0,16
до
1,6мкм;
- допуск к ШIоскостности O,OlI\iThI;
- допуск к перпендикулярности оси
0,02 мм на ДJПше резьбовой части.
крепежного
отверстия
151
Лlава
6.
спосоБы креТUll!llUЯ ата:елеJЮМemров
Требования, предъявляемые к качеству обработки установоч­
ной поверхности, возрастают с ростом верхней грашщы диапазо­
на измеряемых частот,
Если невозможно обработать установочную поверхность объ­
екта с необходимым качеством, можно использовать тонкую про­
кладку под акселерометр, выполненную из пластичного материа­
ла (алюМlПlИя или меди), которая, заполняя при деформации ~rnк­
ронеровности, способствует повышенlПQ жесткости :КОНТЗIcrного
соединения.
При монтаже важно соблюдать момент затяжки резьбового
соединения, обеспечивая достаточное усилие поджатия в преде­
лах упругой деформации крепежного элемента, При испытани­
ях акселерометров рекомендуются моменты затяжки для резьб:
МЗ -0,бН.м;М5, 10-З2
от
7 до 9 Н'М,
UNF -1,8Н-м; Мб,
1I4-24-З,БН,м;М8-
Чрезмерная затяжка может создать в основашш ак­
селерометра механические напряжения, отрицательно влияющие
на его работу, или вывести из строя резьбовое соеДШIение,
Крепежные шшшьки и винты обычно выполняют из стали, од­
нако при работе в сIlльных перемеlПlЫХ магнитных полях целесо­
образно использовать немагШIТные материалы.
Наиболее предпочтительно крепление акселерометра резь­
бовой шпилькой (рис. 6,lа), которое позволяет при качественно
обработанной установочной поверхности объекта получить ма­
ксимальное значение частоты установочного резонанса. Глубина
резьбового отверстия объекта должна быть такой, чтобы шшшька
не упиралась в дно резьбовых отверстий, и не образовывался за­
зор между прIlЛегающими поверхностями.
Двойной резьбовой люфт и возможность изrnба ПППIЛЬки поз­
воляют, В определенных пределах, скомпенсировать неперпенди­
кулярность резьбового отверстия к установочной плоскости объ­
екта. Акселерометры с резьбовым отверстием, благодаря плоской
поверхности основания, наиболее универсальны в креплении
и при необходимости могут устанавливаться посредством сквоз­
ного ВlПIта (рис,
152
6.16) или
приклеивания.
Пава
6. CJtDCQi)bl крепления акселерометров
Широко распространены акселерометры с цилиндрическим
резьбовым крепежным выступом на основании (рис, 6,lв). Как
и при креплении шпилькой, связь акселерометра с объектом
осуществляется, главным образом, за счет поджатия к нему
плоской части основанИЯ. Известны акселерометры с коничес­
ким резьбовым выступом
[161],
выполняемым для повышеIПIЯ
контактной жесткости с объектом без дополнительной опоры
основаШlем, ПО :качеству креплеШlе резьбовым выступом осно­
ванИЯ акселерометра максимально приБШlжается к креплению
резьбовой шпилькой,
Общие недостатки названных способов :крепления - это слож­
ность ориентирования акселерометра на установочной плоскос­
ти, в случае необходимости задаffiIЯ направления выхода кабеля,
и вероятность самоотвинчивания без дополюпельной фиксации
при длительной эксплуатации.
Широкое распространение получили акселерометры с флан­
цевым
креплением
(рис,
6.1г),
обеспечиваюrцm.I
высокую
надежность и допускающим установку с фиксированным на­
правлением :кабеля, Следует ПРИIПIмать во внимаlПlе, что увели­
чеШlе массы и габаритов таких акселерометров за счет фЛaIща,
а также неравномерное усилие поджатия по контактной повер­
хности способствует сниженlПO частоты установочного резо­
нанса,
В
некоторых конструкциях акселерометров
крепление
одним
или
несколькими
ВlПIТами
периферийные отверстия в корпусе (рис, 6.1д,
предусмотрено
через
6.le),
осевое
или
что иногда
удобно при монтаже. Такое креплеffilе приводит к статической
деформации всего корпуса и может отрицательно повлиять на ра­
боту пьезоэлемента, еCШI конструкция акселерометра выполнена
без учета этого фактора.
При резьбовом креплеffilИ акселерометров, если не предусмот­
рен их последующий демонтаж, вместо консистентной смазки
иногда прш.Iеняются клеи или компаунды, повышающие надеж­
ность соеДl-шения,
153
Лlава
6.
спосоБы креТUll!llUЯ ата:елеJЮМemров
Клеевой способ крепления (рис.
можности
выполнения
в
6.2)
используется при невоз­
месте установки
акселерометров кре­
пежных отверстий.
6.2. Варианты клеевого креШIения акселерометров:
1 - акселерометр; 2 - контролируемый объект; 3 - клей;
4 - двусторонняя липкая лента; 5 - npиклеивае:мый
Рис.
переходной резьбовой элемент
Необходимо применять твердые клеи с анаэробной полимери­
зацией, например цианакриловые и эпоксидные, Для повьппения
рабочей частоты акселерометра следует стремиться к максималь­
ной жесткости клеевого контакта, что ДОCТIП'ается при тонком
слое клея и его высокой твердости. Цианакриловый клей исполь­
зуется только при плоских и гладких склеиваемых поверхностях,
так как он не заполняет углубления и зазоры, Клеи, содержащие
растворитель, не обеспечивают высокую жесткость соединения
по всей установочной поверхности.
Перед
приклеиванием
сопрягаемые
поверхности
объекта
и датчика очищают от загрязнеlПlЙ и обезжиривают, После нане­
сения клея и поджатия вокруг основания акселерометра должен
образоваться замкнутый поясок выдавлешюго клея (рис, 6,2а),
что свидетельствует об отсутствии непроклеенных участков.
При кратковременной установке акселерометров в условиях
нормальной температуры иногда в :качестве клеящего материала
используется пчелиный воск, а также тонкая двухсторонняя лип­
кая пласТJПI:ка или лента (рис.
154
6.26).
Максимальная рабочая тем-
Пава
6. CJtDCQi)bl крепления акселерометров
пература при креШIении воском ограЮlчена
ускорение
40
ос, а предельное
-100 м,с-1 ,
для многократной установки акселерометра может использо­
ваться приклеиваемый переходной резьбовой элемент (рис,
6.28),
представляющий собой плоский диск с резьбовым выступом или
отверстием в центре,
Применение клея, благодаря заполнеffilЮ сравнительно жест­
ким материалом микропустот между соединяем:ьп.ш: поверхнос­
тями, допускает некоторое Сffilжение качества обработки поверх­
ности объекта. Клеевое крепление акселерометров, выполненное
с соблюдением соответствующих требовnЮIЙ к обработке повер­
хности объекта, выбору клея и технолоГJШ склеивания, позволяет
реализовать достаточно высокие метрологические характеристи­
ки, Основными недостатками такого креrшения считаются мень­
шая надежность и прочность клеевого соединения по сравнению
с резьбовым, ограЮlЧение рабочего диапазона температур (для
большинства клеев до
80
ОС), а также сложность демонтажа дат­
чика без его повреждения.
При обзорных исследованиях колебаний, связанных с необхо­
димостью быстрого перемещения акселерометра по поверхности
контролируемого объекта, используется установка на магЮIте или
применение ручного щупа. В некоторых случаях, когда не пред­
ставляется
возможным
осуществить
креrшение
акселерометра
ОIШсанными выше способами, применяют поджатие с внепrnей
опорой, Такие способы креплеlПlЯ показаны на рис,
6.3,
Установка на малште возможна только на хорошо обработан­
ную поверхность, выполненную из ферромaгmrrного материала.
для крепления используется специальный держатель (рис. 6.за),
состоящий из постоянного магlШта и стального магнитопровода.
На поверхности держателя для креплеlПlЯ акселерометра имеется
резьбовой выступ.
Если для сохранения необходимой частоты установочного
резонанса в процессе вибрации минимальная сила сцепления
магнитного держателя с объектом должна составлять не менее
155
Лlава
спосоБы креТUll!llUЯ ата:елеJЮМemров
6.
половины статической сШIЫ сцепления магнита РОт' то верхний
предел измеряемого ускорения
a
может быть оценен по фор­
IllilX
муле
(6.2)
где т д -
масса магнитного держателя,
11'
",1';'""
6--_.,
,
.
Рис.
9. ___ ,.
.~
i
'
2-·,
~
6.3. КреШIение акселерометров:
а - на магните; б - с использованием ручного щупа; в - с внепrnей
- с имитатором щупа; 1 - акселерометр; 2 - :конrpолируе­
3 - магнитный держатель; 4 - постоянный магнит;
5 - :магнитопровод; 6 - щуп; 7 - упругий элемент;
8 - виброизOJrnpующая прокладка; 9 - имитатор щупа
опорой; г
:м:ый объект;
При
использоваюш
мапПlТНОГО
креплеIПIЯ
следует
иметь
в виду, что держатель своей массой дополнительно нагружает
контролируемый объект, а максимальная рабочая температура ог­
раничена предельной рабочей температурой магнита.
ПрименеlПlе ручного щупа (рис,
6.36)
позволяет осуществить
самый быстрый способ механической связи акселерометра с объ­
ектом. Однако, в связи с ffilЗКОЙ частотой установочного резонан­
са
156
(1-2
кГц), отклонением оси датчика от нормали и непостоян-
Пава
6. CJtDCQi)bl крепления акселерометров
ным усилием поджатия, набmoдается ffilЗКая воспроизводимость
результатов измерений.
Проведенное автором экспериментальное исслеДОВaIШе работы
ручных щупов различных конструкций с ИСПОЛЬЗОВaIШем акселе­
рометра массой
ного резонанса
чивающим
20 г и паспортным: значеlШем частоты установоч­
15 кГц показали, что главным фактором, ОГРaIШ­
частоту установочного резонанса
системы акселеро­
метр--щуп, является малая жесткость контакта в месте соеДШlеЮIЯ
щупа с обьеll..'ТОМ. Изменеffilе дmrnы и .диаметра щупа до
1,5-2 раз,
а также формы и магериала его наконечника сказываются в гораздо
меньшей степеffil, При этом несколько лучший результат достига­
ется при использовании дюралюминиевого щупа с закругленным
концом, что соответствует данным работы
[62],
Преи:мущественное влияние контактной жесткости наглядно
подтверждается :креплением акселерометра на имитаторе щупа
(рис, 6.3в), обеспечивающего достаточно высокую жесткость
контакта с обье:rcroм за счет резьбового соеДШlения. В данном
случае, частота установочного резонанса возрастает в несколько
раз и уже существенно зависит от геометрических параметров
и механических свойств материала имитатора.
При установке с внепrnей опорой, которой могут служить фун­
дамент, стена, пол или иной стационарный объект, следует ис­
пользовать упругий элемент (пружину), создающий необходимое
статическое усилие поджатия акселерометра к обьекту. Между
ПРУЖШlой и акселерометром целесообразно поместить вибро­
изолирующую прокладку, например из резШlЫ, препятствующую
появлеffilЮ дребезга и передаче иных колебаний со стороны сис­
темы :крепления.
В ряде случаев (СМ. подглаву
4,3)
необходима электрическая
изоляция корпуса акселерометра от объекта. При :измерении виб­
рации в диапазоне низких частот акселерометр устанавливают на
переходном элементе, выполненном из диэлектрического матери­
ала, Для достижения высоких значеffilЙ частоты установочного
резонанса используют тонкую слюдяную про:кладку (O,05--Q, 1 мм)
157
Лlава
6.
спосоБы креТUll!llUЯ ата:елеJЮМemров
и специальную изолирующую резьбовую шшшьку
[62];
выпол­
ненную из диэле:rcrpика или металла с изолирующим покрытием.
Тонкая изолирующая прокладка может быть установлена также
между магнитным держателем и объектом.
Экспериментальные результаты, полученные при разных спо­
собах крепления од;ного и того же акселерометра, приведены
в табл,
6.1 [62].
Указанные в ней значения резонансных частот,
касающихся крепления акселерометров на магlПlте; представля­
ются несколько завышенными, Согласно другим источникам
158, 160], частота установочного
не превышает
[94,
резонанса при таком креIШеmш
7-1 О кГц, что подтверждается практикоЙ.
Таблица
6.1
Влияние способа креплеиия иа частоту установочного
резоианса акселерометра
Частота уста­
Способ креШIения
новочного ре­
зонанса, кГц
23-25
Резьбовой,
на стальной f-с_'_шлы_'_'_МО_'_<е_ню_М_'"_Тяжки
_ _ _ _+_-,-II:---,-12,------1
через тонкую сшодяную про:кладку
23-24
смазкой
через толстую слюдяную прокладку
с резьбовым переходным элементом
с резьбовым переходным элементом
и мягким :клеем
Клеевой
тонкой двусторонней шшкой лентой
толстой
(0,8
:кой лентой
158
ММ) двусторонней шш­
16--18
24-25
20-22
13-15
23-24
17 18
17-19
1,6--1,7
Пава
6. CJtDCQi)bl крепления акселерометров
Омнчанuе та6л
со смазкой
ПОСТОЯН-
61
19-20
12-13
без смазки
с тонкой cmoдяной прокладкой
и смазкой
стандартным с острым наконечни-
15-16
1,4-1,6
Поджаru:е
ручным
стандартным с закруглеlПlЫМ HaкQ-
щупом со
смазкой
вместо щупа использована стандар­
тная резьбовая шrnшь:ка
5 :м:м
2,6-2,7
Кроме правильного механического соединеlПlЯ :корпуса аксе­
лерометра с объе:rcroм, следует уделять ВlПlмание размещению
и фиксации соединительного кабеля. Его влияние на работу ак­
селерометра может быть значительным за счет передачи пьезо­
элементу через элементы :конструкции механических напряжений,
возникающих при вибрации кабеля в непосредственной близости
от датчика. Деформации кабеля, вызваIПIые его вибрацией, спо­
собствуют возникновеmпo дополнительных электрических сигна­
лов за счет проявления трибоэлектричес:кого эффекта. Особенно
неблaroприятными в этом отношении являются акселерометры
с осевым выводом жесткого кабеля и мшшатюрные :конструкции,
имеющие малое расстояние между пьезоэлементом и местом при­
соединения кабеля к :корпусу
[62],
При проведеlШИ ответственных измерений в IШIpокой полосе
частот, для оценки верхней гранlЩЫ рабочего диапазона, жела­
тельно экспериментальное определеlШе значения частоты уста­
новочного резонанса акселерометра, смонтированного на :контро­
Шlруемом объекте.
159
ГЛАВА
7
конструкции АКСЕЛЕРОМЕТРОВ С СОСТАВНЫМИ
ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ
Известны сотни конструктивных вариантов пьезоэлектриче­
ских акселерометров с разнообразными техническими xapaк.re­
ристиками, В настоящей главе приведены характерные примеры
реализации основных конструктивных схем пьезоэлеh.'Трических
акселерометров
с
электромеханическими
преобразователями
составной конструкции, предназначенных для различных задач
и условий практическоro применеIПIЯ, Выбор рассматриваемых
датчиков
проведен
с
учетом
возможности
широкого
представ­
ления всех типов рабочей деформации пьезоэлеменТQВ, наибо­
лее распространенных способов крепления на контролируемом
объекте, особенностей выполнеIПIЯ пъезоэлеменТQВ и корпусов,
а также и других конструктивных особенностей,
7.1. Акселерометры с рабочей деформацией
растяжеНИЯ-1,:жатпя
Малогабаритный акселерометр ДВ-ОIС (рис.
7,1),
разработан­
ный НКТБ «Пьезоприбор)) совместно с JППI им, М. М, Громова,
имеет сравнительно простую конструкцию с упругим поджатием
элементов,
Пьезоэлемент, с целью повышеlПlЯ коэффициента преобра­
зования по заряду, содержит пять слоев с параллельным соеди­
неlПlем
электродов и изготовлен
с
использованием
технологии
термодиффузионной сварки, ИзОЛИРОВ3IПlый симметричный вы­
ход обеспечивается ИСПОЛЬЗОВ3Iшем керамических изоляторов из
КерaI01ки на основе АI1О з и двухпроводного антивибрационного
кабеля АВКТМ-2. Инерционный элемент выполнен из сплава
ВНМЗ-2, Элементы корпуса из титанового сплава
160
BT3-1
герме-
7.1. AКEeдepallempы с рабочей дефоJ1МllЧllей расmя:нce:нuя-c:нcаmuя
тично соединены лазерной сваркой, Крепление акселерометра
осуществляется резьбовой шпилькой М5,
Система упруго поджатия акселерометра ВДВ-19 (разработ­
ка ЛИИ им, М. М, Громова) имеет более сложную конструкцию
(рис,
7.2),
Рис.
дополнительно содержащую тарельчатую пружину
7.1. Конструкция
акселерометра дв-о 1С:
1 - ОСНОВll1Ше; 2 - изолятор;
3 - ШIерционный элеменr;
4 - гайка; 5 - шmшъка;
6-
7-
изолирующая втулка;
ПЬe3Qэлемеш;
9-
трубка;
1О -
8-
кръшrкa;
Рис.
5,
7.2. Конструкция
акселерометра Вдв-l9:
основание;
1-
3-
2-
корпус;
пъезоэлемент;
4 - кръшrкa; 5 - npужина;
6 - инерционный элемеш;
7-
то:косъе:мная прокладка;
шryцер;
8-разъем
ll-кабель
Стяжная шпилька выполнена совместно с основанием, особая
конфигурация которого способствует снижеffilЮ чувствительнос­
ти к деформациям объекта. а максmшльно возможное разнесение
мест соединения корпуса и пьезоэлемента с основанием умень­
шают влияние внеШIПlХ акустических помех. Акселерометр имеет
несимметричный выход и снабжен коаксиальным ШIНиатюрным
герметизированным разъемом. Элементы корпуса, изготовленные
из титанового сплава
BT3-1, соеДШIeНЫ
лазерной сваркой,
161
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Изображенный
на
рис,
МИIшатюрный
7.3
акселерометр
ДВ6-022 (совместная разработка НКТБ «Пьезоприбор)) и JПiIИ
им, М. М. Громова), содержащий два дисковых изолированных пье­
зоэлемента, имеет симметричный выход, Конструкция основаIШЯ
аналогична модели ВДВ-19 со свареннЬThПI элементами корпуса из
титанового сшmва
BT3-1
и креплеЮlем резьбовой ШIШ.JIЬКOЙ М3.
Рис.
7.3. Конструкция акселерометра ДВ6-022:
1 - основание; 2 - корпус; 3 - изолятор;
46-
крышка;
5-
:инерционный элемеIП;
ПЪе30элемеIП;
7-
rшyцер;
8-
кабель
Основные характеристики рассмотренных акселерометров об­
щего назначения приведены в табл.
7,1,
Таблица
7.1
Техническне характернстикн акселерометров
общего назначения
ХарактеРИСПlка
ТJШ акселерометра
ДВС-ОlС
ВДВ-19
двб-022
10,0
1,0
5,0
3,0
0,35
0,31
35
25
70
Коэффициент преобразования:
по заряду, пКл·м- 1 ·с 2
по напряженmo, MB·M·1 ·c 2
Частота установочного
резонанса, кГц
162
7,1, А!iCе7еРИU'n!РЫ с рaf50Ч~Й д"фОJl·,!<IЦ!U_ii. Р<lсmЯ:Ж:fflш/-С-'-iNJmШl.
{flфнчm-ше таБJ
Э:тектрическая б[КОСТЬ, нФ
9,0
1,5
1,2
10
25
30
20
30
71
~!K~~e;~:e~el b~.~~~~~ _
СИНУСОи.::1а..ThШlЯ виорация
У'ЩР
ОКПП.
%, не
бо:тее
Рабочий диапазон те~шератур,
ОТ ~rnНУС
ос
Масса, т, не БОIIее
60
дО 2()О
15,()
17,5
Акселерометр НКТБ «Пьезоприбор)) AК21-S0
[162]
3,5
(рис.
7.4),
предназначенный для измерения интенсивных вибрационных
и ударных ускорений, содержит два изолированных от :корпуса
дисковых пьезоэлемента.
------c'~
Рис.
1-
7.4.
Конструкция акселерометра АК2]-50:
основание;
4-
2-
шшшька;
6-
5-
ИЗОЛЯТОР;
пьезоэлемент;
3-
крышка;
инерционный элемент;
7-
штуцер;
8-
кабель
J63
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Для сокращения размеров корпуса и повышения прочности
закрепления кабеля, жилы последнего проходят через залитое
ко~шаундом Г -образное сверление в основаЮlИ. Акселерометр
имеет изолироваIПIЫЙ симметричный выход, элементы корпуса
из титанового сплава ВТ3-1 и крепление посредством резьбового
выступа.
В предназначенном для измерения вибрационного и ударного
ускорений высокого уровня акселерометре НКТБ ((Пьезоприбор}}
ABy-ооз
[163]
(рис.
7.5)
электромеханический преобразователъ
содержит дисковый пьезоэлемент, изолятор и инерционный эле­
мент, установленные на резьбовой шпильке, смещенной относи­
тельно продольной оси корпуса.
Рис.
7.5. Конструкция акселерометра ABy-ооз:
основание; 2 - крышка; 3 - токосъемная
4 - инерционный элемент;
5 - пьезоэлемент; 6 - изолятор; 7 - ппшлька;
8 - накладка; 9 - втулка; 1О - кабель
1-
прокладка;
Такой прием позволяет при м:инш.щльном внутреннем диамет­
ре крышки освободить место, необходимое для выхода провод-
164
7.1. AКEeдepallempы с рабочей дефоJ1МllЧllей расmя:нce:нuя-c:нcаmuя
IПlка кабеля, присоединяемого к токосъемной прокладке пьезоэ­
лемента.
Изолятор ВЬПIолнен из прочного твердого материала" например
нефритаили монокристаллического ~Оз с полированными плос­
кими поверхностяJI.ПI, благодаря че:му, за счет уменьшения трения.
снижаются тангеIЩИaJIЫlЫе остаточные механические напряжения
в пьезоэлементе после затяжки npеобразователя. для уменьшения
продольных мехаlПlческих нагрузок на пъезоэлемент, возникаю­
щих при работе акселерометра. Шlерционный элемент изготовлен
из титанового сплава. Материал корпуса
-
нержавеющая сталь,
Лишенный внепrnей оболочки участок коаксиального антивибра­
ционного кабеля внутри основания зажат шпилькой через полу­
сферическую накладку, что обеспечивает его фиксацию и элек­
трический контакт экрана с основанием, Акселерометр имеет
несимметричный выход и крепление резьбовым выступом М5,
Основные характеристики рассмотренных акселерометров для
измерения ускорений высокого уровня приведены в табл.
7,2,
Таблица
7.2
Технические хараll.."'Теристики акселерометров
для измерения ускорений высокого уровня
ХарактеРИСПlка
Коэффициент преобразования:
по заряду, пКл·м- 1 ·с 2
по НШ1ряженmo, мВ·м .1·c 2
Частота установочного резонанса, кГц
Электрическая емкость, ПФ
Предельное рабочее ус:кореIШе, IОЗ·м,с-2 :
синусоидальная вибрация
удар
О:КПП,
Тип акселерометра
АК2[-50
АВУ-003
0,2
0,2
80
[,0
0,02
[[5
Масса, г, не более
0,4
[50
[000
50
[20
%, не более
Рабочий диапазон теI\.шератур, ос
О,О[
5
от минус
8
I
60 до 200
5
165
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Примером датчика, предназначенного для клеевого h."Репле­
IПIЯ на контролируемом объекте (рис,
7.6), является
акселерометр
АПП2-1 (совместная разработка НКТБ ((Пьезоприбор)) и :нии
физических измерений).
Акселерометр с изолированным симметричным выходом со­
держит пьезоэлемент, сваренный из се~rn параллельно соединен­
ных слоев, и изоляторы с металлическим покрытием со стороны
пьезоэлемента для подключения выводов, Крышка корпуса и ос­
нование из титанового сплава ВТЗ-l, с тангенциальной заделкой
кабеля, соединены лазерной сваркой, В дно крышки вмонтирова­
на накладка из IШЗкодобротного материала для демпфирования
его резонансных колебaIШЙ. Коэффициент преобразования аксе­
75 пКл,м-1,с1 , частота установочного
22 кГц, eмкoCIЪ - 15 нФ, масса - 60 г.
лерометра АПП2-1 составляет
резонанса -
Рис.
4-
7.6. Конструкция акселерометра AIПI2-1:
1 - изолятор; 2 - накладка; 3 - ВШIт;
5 - пьезоэлемент;
6 - крышка; 7 - кабель; 8 - основание
инерционный элемент;
Высокочувствительные акселерометры,
JПюгда называемые
сейсмоприемни:ками, предназначены для измереlПlЙ виброуско­
реlПlЙ малого уровня и отличаются высо:кю.I значениями коэф­
фициентов преобразоваЮIЯ по заряду или напряжеlПlЮ, В ком-
166
7.1. AКEeдepallempы с рабочей дефоJ1МllЧllей расmя:нce:нuя-c:нcаmuя
прессиOIПlЫХ конструкциях это может достигаться увеличеlПlем
массы инерционного элемента, выбором П:КМ с высокими значе­
ниями соответствующих пьезоконстант, а для коэффициента пре­
образования по заряду
-
увеличением параллельно включенных
слоев пьезоэлемента, Наглядным примером такого подхода могут
служить сейсмоприемlПlКИ серии СПП
[164, 165], разработанные
в НКТБ «Пьезоприбор)).
Преобразователь сейсмоприемника СПП-15 (рис,
7,7) с
изоли­
рованным симметричным выходом содержит l1-слойный пьезо­
элемент, два метamшзированных изолятора и инерционный эле­
мент массой
200 г из
сплава ВНМЗ-2. Элементы преобразователя
стянуты резьбовой шшшькой с гайкой. Корпус выполнен из алю­
миниевого сплава с износостойкой резьбовой вставкой из нержа­
веющей стали в основании для крепления шпилькой М8,
Рис.
7.7. Конструкция сейсмоnpиемника
1 -шпилька; 2 -гайка; 3 -:крышка;
5 - изолятор;
6 - пьезоэлемент; 7 - основание;
8 - кабель; 9 - штуцер; 1О - вставка
СПП-15:
4-
инерционный элемент;
167
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Сейсмоприемюп(И СПП-16 и СПП-17 имеют аналогичную
:конструкцию. отличаются материалом и массой JПlерционного
элемента, а также количеством слоев пьезоэлемента, Номшшль­
ные значеIШЯ основных характеристик сейсмоприемников приве­
дены в табл,
7.3,
Таблица
7.3
Техиические характеристики сейсмоприемников серии СПП
Тип акселерометра
Характеристика
Коэффициент преобразования
по заряду, пКл'М 1· с 2
Частота установочного
резонанса, кГц
Электрическая емкость, нФ
ОЮШ,
СПП-15
СПП-16
СПП-17
700
300
100
8
10
13
40
40
20
%, не более
5
Рабочий диапазон температур,
от :минус
ос
40 до 90
12134 х 74
Габаритные размеры, мм
Масса, г, не более
350
I
250
034
х
55
230
в BЫCOКOl'e"МIIepaтypныx пьезоэлектрических акселерометрах,
с рабочей температурой до
400
ос и выше, также используется
деформация растяжения---сжатия. При конструировании таких ак­
селерометров ПРШlимается во внимание, что применяемые в них
пкм с высокой температурой фазового перехода имеют сравни­
тельно невысокую пьезоактивность, а их удельная проводи::~юсть
заметно возрастает с ростом температуры,
Так как :коэффициент преобразования акселерометра по за­
ряду может быть повышен за счет увеличеIШЯ количества слоев
пьезоэлемента, то при регистрации сигнала целесообразно ис­
пользование СЗУ. удовлетворительно работающих при сниже­
ffiШ сопротивления датчика до
168
1О
кОм. Еще одна из теХffilческих
7.1. AКEeдepallempы с рабочей дефоJ1МllЧllей расmя:нce:нuя-c:нcаmuя
сложностей связана с усилением влияния разШlчий КЛТР пьезоэ­
лектрического и КОНСТРУКЦИOlПlых материалов, в результате чего
возникают значительные механические напряжения, и изменяет­
ся усилие упругого поджатия в широком диапазоне температур,
ТрадИЦИОIПIaЯ конструкция высокотемпературного акселеро­
метра БОЛЬШlПIства производителей содержит пакет, набршПlЫЙ
из нескольких дисковых пьезоэлементов с токосъемными метал­
лическими прокладками между ними. Упругое поджатие осущест­
вляется резьбовой шпилькой, проходящей через осевые отверстия
элементов преобразователя и тарельчатой ПРУЖIПIЫ, способству­
ющей компенсации разности температурного расширеlШЯ
[166],
При этом центры масс инерЦИОlПюго элемента и пакета пьезоэле­
ментов лежат в разных точках оси симметрии преобразователя.
Возможны также lПIые конструктивные решеlШЯ. Например,
в высокотемпературном акселерометре ATB-ООl
тная разработка НКТБ ((Пьезоприбор»
техники), изображенном на рис,
[118]
(совмес­
и НПО измерительной
7,8, используется
многослойный
пьезоэлемент, выполненный вместе с изолирующими накладка­
ми на торцах по технологии термодиффузионной сварки из ПЮvf
ТВ-2 и снабженный двумя проволочными выводами.
Рис.
7.8. Конструкция акселерометра ATB-ООl:
основание; 2 - кабель; 3 - пьезоэлемеш
с изоляторами; 4 - опора; 5 - гайка; 6 - крышка
1-
169
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Такая конструкция пьезоэлемента позволяет исключить токо­
съемные
прокладки
и
устраЮlТЬ
контактные
межэлементные
соединения, что повышеffilЮ стабильности и повторяемости его
характеристик.
Другой особеlПlОСТЬЮ рассматриваемой КOHCТPyкцmI является
система поджатия пьезоэлемента к основанию Шlерционным эле­
ментом, состоящим из опоры и фасоlПlОЙ гайки, выполнеlПlЫХ из
материалов с различными КЛТР. Размеры элементов и свойства
конструкционных материалов выбраны такими, чтобы суммар­
ное температурное расширеЮlе преобразователя и системы уп­
руго поджатия взаимно компенсировались, а общий центр массы
Шlерционного элемента был максимально приближен к центру
пьезоэлемента.
Акселерометр имеет симметричный изошqюванный от корпу­
са выход, Двухпроводный кабель типа КТМС впаян высокотемпе­
ратурным пршюем в отверстие бокового выступа основания. Эле­
менты корпуса, выполненные из нержавеющей стали, герметично
соединены :контактной конденсаторной сваркой,
Коэффициент преобразования акселерометра АТВ-ОО 1 состав­
ляет
0,8
емкость
пКл·м-1,с 1 , частота установочного резонанса
- 0,7
нФ, максимальная рабочая температура
- 20 кГц,
- 450 ос,
масса-60г.
7.2. Акселерометры
с рабочей деформацией изгиба
Малогабаритные акселерометры группы АБ
зоприбор» (рис.
7,9)
[167]
НКТБ ((Пье­
содержат закрепленный в центре дисковый
биморфный элемент, склеенный из двух пластШI п:км ЦТС-19,
эле:rcrpически соеДШlенных последовательно,
Центральная часть внешlШX электродов биморфного элемента
для повьппеlШЯ прочности лайки соедШlительных проводников
ВЬПIолнена ВЖlП'aIПlем серебросодержащей пасты, Остальные час­
ти электродов пластин напылены тонким слоем серебра, Корпус
акселерометров, имеющий внутреmnoю кольцевую полость, цели-
170
КO~f отmп из ;::r;ИЭ:Iектричес;кого КQ:'\ШОЗИЦИQННОГО материала. Вне­
шняя поверхность корпуса ~fеТ<L'LlИзирована д..'IЯ защиты от элек­
трических по~ех. Aкce.1epU:\leтphI Irnеют неси\-[иетричный выход
и пре;1НаЗ1:lачены ;щя
K:IeeBoro
I<.."Реrшения. Отсутствие ~tассивных:
метаЛ.:Iических дета.."']еЙ, ДИэлектрическml корпус и тоmrnе :'\.feтa.:~­
лические поI<..-рытия обеспечивают ~ППlима..ThНУЮ чувствительность
ь: переменным: магнитным пошrм. НО"illfнапьные значения основ­
ных характеристик акселерометров приведены в табл.
7.4.
Рис.
7_9. Конструктивная схема акселеромегра
] - пьезоэлемент; 2 - корпус; 3 - центральная
4 - электростатичесюIЙ экран;
5 - соедиmneльный проводник; 6 - кабель
группы АБ:
часп. электрода;
Таблица
7.4
Технические характеРПCnIJШ аRселерометроВ группы АБ
ХарюcrеРИСПJКа
Тип акселерометра
АБ-2
АБ-3
3,0
]4,0
Коэффициент преобразования:
по заряду, пКл,м l· с 2
по напряженшо, мВ,м l· с 2
Частота установочного резонанса, кГц
Электрическая е:tillФсть, нФ
ОКIШ,
%, не
более
Рабочий диапазон температур, ос
Габаршные размеры, :мм
Масса, г, не более
],0
2,0
7,0
3,0
3,5
7,0
2,5
от мпнус 60 до 80
3,2x144x18
2,0
3,5
171
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
в приведеlПlЫХ ниже конструкциях акселерометров использо­
ваны биморфные пьезоэлементы в форме диска с централЬн::ы1vI
отверстием, ВЫПОJПIelПlые по технолоГЮI термодиффузионной
сварки. Слои пьезоэлемента имеют однонаправленную поляри­
зованность и параллельное электрическое соединение, Вывод от
среднего электрода осуществлен вмонтированным проволочным
ПРОВОДlПlком,
Акселерометры Н:КТБ
представляют
«Пьезоприбор)) серии АК317
унифицированный
ряд,
состоящий
из
[164]
четы­
рех типов датчиков, имеющих стандартный корпус из нержа­
веющей стали с флшщем для h.']Jепления тремя винтами М4
(рис.
7.1 О). ДЛЯ удобства :крепления при проведеlПlИ промежуточ­
ных испытаний в центре основзffiIЯ выполнено резьбовое отвер­
стиеМ5,
Рис.
1-
5-
опора;
7.10. Акселерометр АК317-25:
2 - изолятор; 3 - шпилька; 4 -гайка;
пьезоэлеменr;
8ш
6-
кръшr:кa;
металлорукав;
9-
7-
основание;
кабель
7.1.
Акrелqюшmры с рабочей дефоpмnцuеи изгиба
Диаметр и I\OJШчество параллельно в:ключеlПlЫХ пьезоэлемен­
тов зависит от типа акселерометра: АКЗ17-2 и АКЗ
жат по одному пьезоэлементу, АК317-25
-
17-10
два, а АК317
содер­
-
три.
Пьезоэлементы установлены на резьбовой шпильке через опоры
и керамические изоляторы со стороны основаffiIЯ и гайки. Нор­
мирование коэффициента преобразования по заряду в процессе
сборки осуществляется подбором пьезоэлементов по требуемому
CyY\'IMapHO:MY заряду
(при использовании двух или трех пьезоэле­
ментов), а также выбором необходимого диаметра изоляторов.
Все акселерометры данной серии имеют изолированный сим­
метричный выход, выполненный прочным двухпроводным анти­
вибраци:oIПlЫМ кабелем АВКТД(Л) в защитном металлорукаве.
для СЮlжения помех от токов в контурах заземления, экран :кабе­
ля не имеет гальванического контакта с корпусом акселерометра,
Акселерометры серии АКЗ 17 по своим теХЮlческим характе­
ристикам удовлетворяют требования:м БОЛЬШlПIства задач вибро­
контроля различных видов промышленного оборудоваIПIЯ,
НОh.шнальные значения основных характеристик акселеромет­
ров приведены в табл,
7,5,
Таблица
7.5
Технические характеристики акселерометров серии АК317
ТШ1 акселерометра
Характеристика
КоэффициеIП преобразования по заряду, пКл,м .1· с 2
Электрическая емкость,
ПФ
Частота установочного
резонанса, кГц
АК
АК
АК
АК
317-2
317-10
317-25
317-50
2
10
25
50
5
8
18
30
30
13
13
11
10000
5000
5000
2500
Предельное рабочее вибрационное ускорение,
м,с-2
173
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
01Wнчанuе табл
ОКIШ,
%, не
более
OrМИ-
Рабочий диапазон
ОТ :минус
температур, '>С
60 до 160
нус60
до
Предельно допустимая
температура ос
КВДО, (м·(;'"2)/(ыкм,м- 1 ),
КВМП, (м.(;'"2)/(А,м
75
2,5
.1),
КВАП, (m·c-2 )/дБ
Масса без кабеля, г
125
[60
200
3.10
З
5·[0'
1.10 з
[00
Акселерометры серии АПЭ (совместная разработка НКТБ
«Пьезоприбор)) и НПП «Электрою) ) также предназначены для
эксплуатации в производствеlПlЫХ условиях. Серия включает
в себя три унифицированные конструкции: АПЭ-l
-
однокомпо­
нентный акселерометр, АПЭ-2 - двухкомпонентный (две модифи­
кации с различно ориентированными направлеlПlЯМИ измерения)
и АПЭ-3 -трехкомпонентный (рис.
7.11) [144].
Акселерометры имеют дюралЮМИЮlевый прямоyroльный кор­
пус С ортогонально ориентированными ИЗOШl]Jованными бимор­
фНЬThШ дисковыми пьезоэлементами. Количество пьезоэлементов
(от одного до трех) соответствует количеству измеряемых компо­
нентов.
Для повьппения стабильности поджатие пьезоэлементов осу­
ществляется через ПРУЖИlПlые самоустанавливающиеся элемен­
ты. Перед сборкой все сопрягаемые поверхности преобразователя
покрываются термостойкой кремнийорганической композицией,
:которая,
заполняя
микропустоты,
повьппает
контактную
жест­
кость соединений и защищает электрические контакты от окислеlПlЯ.
Для вывода сигналов от :каждого пьезоэлемента используется
фторопластовый антивибрационным :коаксиальным кабель. ПО-
174
7.1.
Акrелqюшmры с рабочей дефоpмnцuеи изгиба
лость корпуса с пьезоэлементом, ориентированным вдоль оси
Z,
закрыта плоской крышкой, Остальные элементы двух- и трех­
компонентных акселерометров помещены под крышки, выступа­
ющие за боковые грани корпуса. Крепление акселерометров осу­
ществляется двумя винтами М6 х
в
диагональных
углах корпуса,
50
через сквозные отверстия
Предусмотрена возможность
крепления с электрической изоляцией корпуса от обье:rcrа, для
чего используется комплеll.."I' винтов в ИЗOШl]Jующей оболочке,
диэле:rcrpические шайбы и изолирующая прокладка под корпус,
Номинальные значения основных характеристик акселерометров
приведены в табл,
7,6.
Рис.
7.11. ТреХКО:МIIонентиый акселерометр АПЭ-3:
1 - пружина; 2 - пьезоэлемент; 3, 4 - крьшrкa;
5-
корпус;
6-
кабель
175
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Таблица
7.6
Технические характеристики акселерометров серии АПЭ
Тип акселерометра
Характеристика
АПЭ-I
АПЭ-2А
АПЭ-2Б
z
x,z
х,у
Измеряемые компоненты
ускорения
АПЭ-3
х;
Коэффициент
преобразовaшIЯ по заряду,
пКл_м- 1 ·с 2
25
Электрическая емкость,
пФ
1J
Частота установочного
резонанса, кгц
7,5
Предельное рабочее
вибрационное ускорение,
м·с-2
окпп,
%, не
1000
более
2,5
Рабочий диапазон
ОТ минус
температур, ос
40
до
140
Предельно доuyстимая
тeJ.Шература, ос
160
квдо, (м-с 2)/(мкм.м 1)
ИО 3
КВМП, (м-с 2)/(A'M 1)
5_105
КВАП, (М'С l/дБ
Габаритные размеры, мм
Масса без кабеля, г
176
1·103
41
х
41
37
х
150
41
х
55
37
х
175
55
х
55
200
х
37
y,z
7.1.
Акrелqюшmры с рабочей дефоpмnцuеи изгиба
ТреХКОhШонентный акселерометр АК62
[146]
совместной раз­
работки НКТБ (illьезоприбор}} и НIIIJ; «Динm.IИКЮ}
содержит
шесть изолированных от корпуса б:иморфных пьезоэлементов, за­
крепленных в центре граней куба, установлеmюго на основamш
внутри корпуса (рис.
7.12). Каждая пара противоположно располо­
женных пьезоэлеме:нтов ориентирована и электрически включена
параллельно так, что генерируемые ШvIИ заряды суммируются, Ак­
селерометр имеет три изолированных симметричных выхода, со­
ответствующих направлеЮIЯМ осей измереmrя, общий центр чув­
ствительности которых лежит в геометрическом центре куба.
Рис.
7.12. ТрехкшшонеН"IНЫЙ акселерометр АК62
Коэффициент преобразоваIШЯ акселерометра АК62 составляет
10
пКл·м-1·с 1 , частота установочного резонанса
рическая емкость
14 -
нФ, О:КПП
50 х 50 х 50 ММ, ~шсса-
- 2 %,
- 21
кГц, элект­
габаритные размеры-
180г, Благодаря симметричной конструк­
цни и идентичности электромеханических преобразователей,
значения коэффициентов преобразования и частот установочного
резонанса для каждой оси измерения совпадают,
Сейсмоприе~mик АК5000 НКТБ ((Пьезоприбор}} (рис,
7.13)
с изгибной деформацией пьезоэлемента, обладающий очень вы­
соким значеи:ием коэффщиента преобразования по заряду, пред­
назначен для измереmrя малых виброускорений в области инфра­
низких и низких частот
[165],
Дюралюминиевый корпус сейсмоприемника состоит из осно­
вания и крышки, Преобразователь содержит дисковый биморф-
177
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
ный пьезоэлемент, закрепленный по периферии на стойке, жест­
ко связаmюй с основанием, и двухсекционный инерционный
элемент из сплава BН1vI3-2, установленный на пьезоэлементе
через промежуточные опоры посредством резьбовой ППIильки
с гайками, проходящей через центральные отверстия сопряга­
емых элементов, Общий центр массы инерционного элемента
совмещен с геометрическим центром пьезоэлемента, что
спо­
собствует снижению чувствительности к неизмеряемым воз­
действиям ускореIПIЯ и повышению прочности к перегруз:кам
в поперечном направлении, Датчик имеет несимметричный вы­
ход, выполненный коаксиальным антивибрационным кабелем,
Крепление осуществляется четырьмя винтами М4 через отверс­
тия фланца основаIПIЯ.
Рис. 7.13. Конструкция сейсмоприе:мника АК5000:
1 - инерционный элемент; 2 - стойка; 3 - кръшr:кa;
4 - пьезоэлеменr; 5 - опора; 6 - гайка; 7 - ппшлька;
8 - основание; 9 - кабель
Коэффициент
не менее
500 Гц,
178
4500
емкость
преобразования
сейсмоприеМIПlка
АК5000
пКл·м-1,с 1 , частота установочного резонанса
- 20 пФ, масса - 250 г.
-
7.3.
AкEeдqmllempы с рабочей дефоJ1МllЧllей сдвига
7.3. Акселерометры
как
уже
отмечалось,
с рабочей деформацией сдвига
использование
деформации
сдвига
в электромеханических преобразователях акселерометров позво­
ляет получить высокие метрологические харmcreристики,
одна­
ко связано с дополнительныl\.ш технологичесКИI\.Ш трудностями,
К числу известных производителей таких акселерометров отно­
сятся фирмы ((Брюль и Къер)), (Эндевко)) и
000
«ГлобалТест))
(Россия), Ниже, в качестве примера, рассмотрены три наиболее
распространенные конструктивные
схемы СДВИГQвых акселеро­
метров «Брюль и Къер))
[145, 168, 169].
4374 с преобразователем
«PlanarSheart:)) (рис, 7.14) содержит два прямоуголь­
Миюштюрный акселерометр модели
конструкции
ных пьезоэлемента с направлением поляризованности вдоль рабо­
чей оси, Пьезоэлементы, через прилегающие к IПIм инерционные
элементы в виде цишшдрических сегментов, упруго поджаты ме­
таллическим стяжным кольцом к IШоскостям внутренней опоры,
выполненной совместно с основанием.
05
Рис.
4-
7.14, Конструктивная схема акселерометра 4374:
1 - Е.."Рышка; 2 - основание; 3 - кабель;
5 - опора; 6 - пьезоэлемепr;
7 - :инерЦИОННЫЙ элемепr
стяжное :кольцо;
179
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Преобразователь
(рис,
7,15)
модeШI
4381
конструкции
((DeltaSheatE»
по пртщипу работы аналогичен предыдущему, но
имеет более высокий порядок осевой симметрии, содержит три
пьезоэлемента, закрепленных между расположенной в центре
опорой треугольного сечеlПlЯ и тре],,1Я инерЦИOlПlыми элемента­
ми, прижатыми стяжным кольцом,
021
Рис.
7.15. Конструктивная схема акселерометра 4381:
1 - крышка; 2 - разъем; 3 - основание;
4 - пъезоэлемент; 5 - стяжное :кольцо;
6 - инерционный элемент; 7 - опора
Преобразователь конструкции ((ТhetaSheatE» (рис.
пользуемый, например, в акселерометрах моделей
7,16), ис­
4500 и 4501,
содержит инерционный элемент, расположенный между ДВj'],,1Я
пьезоэлементами, установленными в прорези опоры. окруженной
стяжным кольцом и помещенной в кубический корпус, Направле­
ние рабочей оси варианта исполнения акселерометра определяет­
ся направлением
Be:rcropa поляризованности
пьезоэлемента.
Приведенные схемы преобразователей с деформацией сдвига
используются и в ряде других моделей акселерометров фирмы,
включая тpexКOМIIoHeнтныe, Основные технические характерис­
тики рассмотреlПlЫХ акселерометров приведены в табл,
180
7.7,
7.3.
Рис.
1-
AкEeдqmllempы с рабочей дефоJ1МllЧllей сдвига
7.16. Конструктивная схема акселерометров 4500 и 4501:
2 - опора; 3 - :корпус; 4 - инерционный элемент;
5 - пьезоэлемеIП; 6 - стяжное :кольцо
разъем;
Таблица
7.7
Технические хараь."ТернCllIКИ акселерометров с рабочей
деформацией сдвига (по данным фирмы (d)рюль
Хараюеристика
11 Къер»)
тип акселерометра
4374
4381
4500,4501
0,11
0,18
10,0
8,0
0,3
1,0
85
16
50
0,6
5
1,2
4
1,0
Коэффициент преобразования:
по заряду,
пКл·r.г I ·с 2
по напряжеlПlЮ, mB·m- 1 ·с2
Частота установочного резонансо, кгц
Электричесхая ем:кость, пФ
окпп,
%, не более
Рабочий диапазон температур,
ос
от минус
74 до 250
5
ОТ минус
дО
54
175
Предельное рабочее ус:кореlПlе,
10 З ,м·с-2 :
синусоидальная вибрация
удар
Материал :корпуса
Масса,г
-
50
250
20
20
30
БерИlIЛИЙ
ТИт,",
Алюt.mпиЙ
0,65
43
3,5
181
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Экспериментальный образец трехкомпонентного акселеромет­
раАК631
[146]
(разработка НКТБ «Пьезоприбор)) и НIIIJ; «Дина­
мика))) с общим центром чувствительности по осям измерения
ВЫПOJПlен по схеме тандем-датчика (рис.
1
Рис.
1-
7.17.
Трехкомпонентный акселерометр АК631:
пьезоэлемент;
4-
7.17).
з4
2 - инерционный элемент; 3 - изолятор;
5 - опора; 6 - корпус; 7 - кабель
прокладка;
Трехко:ШIOнентный электромеханический преобразователь ак­
селерометра с комбшlИРОВанной рабочей деформацией пьезоэле­
ментов, выполненный по схеме тандема, состоит из двух пьезо­
элементов с расположенным между ними общим инерЦИOlПlым
элементом. каждый пьезоэлемент с осевым направлением вектора
поляризованности в виде полого циmrnдpа имеет пару электродов
на торцевых и две пары на внешней образующей поверхностях.
Элементы преобразователя сжаты через керамические изоляторы
и металлические прокладки опорами, обеспечивающими равные
по механическим свойствам условия закрепления пьезоэлементов.
При воздействии ускорения в направлении осейХ и
Z происхо­
дит деформация сдвига в соответствующих поперечных направ­
леЮIЯX, а при воздействии в направлении оси У - в продольном.
Направления поляризоваюlOСТИ пьезоэлементов и параллельное
синфазное включение их электродов позволяют получить сигна­
лы, соответствующие трем ортогональным компонентам вектора
ускорения. Выводы выполнены экранированными антивибраци-
182
7.4. AкEeдqmllempы со вcmроеннъпш доnOJmUJШ!Лънымu ycmроШ:mва,lIU
ОIПIЫМИ кабелями, помещенными в общий экран, для крепления
на объекте используются четыре винта, проходящие через сквоз­
ные отверстия в уг.лах корпуса, Основные технические характе­
ристики акселерометра приведены в табл.
7,8.
Таблица
7.8
Технические хараь.."'Теристики акселерометра АК631
Характерисru:ка
Коэффициент преобразования:
по заряду, пКл,м 1· с 2
по НШ1ряженmo, мв,м· 1 ·с 2
Частота установочного резонанса, кГц
Электрическая е:м::кость, пФ
ОКIШ,%
ГабаРИ"IНые размеры, мм
Ось измерения
у
x,z
5,5
6,0
20,0
0,9
5,0
2,0
30
13,0
0,5
5,0
35х35х35
Масса без :кабеля, г
120
7.4. Акселерометры со встроеиными дополнительными
устройствами
из возможных дополнительных устройств, встраиваемых в пье­
зоэлектрические акселерометры, наиболее часто применяются СУ
заряда :или напряжеIШЯ, преобразующие высокий импеданс пьезо­
элемента для последующей передачи на регистрирующее устрой­
ство. Размещение СУ внутри датчика позволяет значительно повы­
сить его помехозащи:щеIПIОСТЪ благодаря отсутствmo:кабеля меж­
ду пьезоэлементом и усилителем. Успеппюе развитие МИII..]Jоэлект­
рОIПIой теXIПIКИ способствовало серийно:му выпуску таких акселе­
рометров болышпIтвомM известных производителей. В последние
годы в :шqювой практике распространяется использование акселе­
рометров с СУ, так называемого стандарта
Piezoelectric).
фирмой (РСВ
ICP (Integrated Circuit
ICP предложен для датчиков вибрации
Piezotronics» (США) и позволяет по двухпроводной
Тип выхода
18З
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
тиши одновременно осущесТШIЯТЬ питание усилителя, используя
специализированный
В
ICP источника то:ка.,
и съем сигнала.
качестве примера датчика со встроенным электронным
устройством ниже приведена конструкция малогабаритного ак­
селерометра ДВ6-301 (совместная разработка НКТБ ((Пьезопри­
бор)) и лии им. М. М. Громова), изображенного на рис.
7.18.
Акселерометр содержит встроенный СЗУ типа УВ58 отече­
ственного производства, закреШIенный в верхней части корпуса.
Преобразователъ выполнен на основе пакета из четырех диско­
вых
пьезоэлементов
с
керамическими
изоляторами
на
торцах.
Рабочий диапазон температур акселерометра ограШlчен предель­
ными температурами встроенного СЗУ. Питание и съем сигнала
осуществляются по двухпроводному экранированному кабелю.
Благодаря Шlзкому выходному сопротивлеffilЮ СЗУ отпадает не­
обходимость использования антивибрационного кабеля. для по­
вышения
помехозащищенности все электрические
цепи, кроме
экрана кабеля, не имеют гальванического контакта с корпусом.
Рис.
7.18. Конструкция акселерометра ДВ6-301:
1 - :корпус; 2 - основание; 3 - пьезоэлемент;
4 - кръшr:кa; 5 - дно; 6 - усилитель; 7 - гайка;
8 - инерционный элемент; 9 - изолятор;
1О - шryцер; 11 - кабель
184
7.4. AкEeдqmllempы со вcmроеннъпш доnOJmUJШ!Лънымu ycmроШ:mва,lIU
Еще ОДIШМ видом встроенного дополнительного устройства мо­
жет быть средство для контроля исправности дагчика :или его ка­
либровки, Применение такого устройства позволяет без демонтажа
акселерометра на контролируемом 06ьеll.."Те проверить исправность
всех цепей, включая регистрирующую arшаратуру, определить
частоту установочного резонанса и, при определенных условиях,
осуществить калибровку. для реализации последней задачи необ­
ходимо соблюдеШIе условия точного соответствия сигнала, полу­
чеmюго при калибровке, фактическо:му значеmпo коэффициента
преобразования акселерометра, который может изменяться в ре­
зультате воздействия различных факторов, например температуры
окружающей среды, стареЮlЯ, меxamrческого повреждеЮIЯ и др.
Перспективный метод контроля работоспособности или ка­
либровки акселерометра заключается в измереШIИ его выходного
сигнала при подаче эталонного напряжения от внешнего генера­
тора на встроеIПIЫЙ кamIбровочный пьезоэлемент, Этот метод
может быть реализован ДВУ1-lЯ способами: использованием виб­
рациОIПIого перемещения пьезоэлемента вместе с инерционным
элементом :или путем передачи деформации рабоче:му пьезоэле­
менту со стороны контрольного
[110].
Вместе с тем, оба названных способа не свободны от опреде­
ленных недостатков. Так, при первом способе, создаваемое ви6роускореШlе в диапазоне рабочих частот акселерометра мало для
получеlШЯ достаточного выходного сигнала. По этой причине он
npименяется только для npoверки работоспособности вблизи ре­
зонансной частоты
[170],
При втором способе выходной сmнал
может быть неоднозначно связан с коэффициентом преобразовaJШЯ
акселерометра, если не реализуется истинный меxaIlИ.Зl\.l его работы,
то есть не создается адекватная рабочая деформация, это в первую
очередь, относится к преобразователям ко~mpессиоmlOГО и сдви­
гового ТIШа. Кроме того, функция передачи деформaцmI рабочему
пьезоэлемеmy зависит от дополнительных факторов (межэлемент­
ной контактной жесткости и ее те]"шерщурной стабильности), что
может привести к значительным опrnбкам при калибровке
[132],
185
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
Экспериментальные исследоваЮIЯ показали, что в акселеро­
метрах с двумя или тремя изгибными биморфными пьезоэлемен­
тами в качестве кaJПIбровочного может использоваться как один
из рабочих элементов, так и введенный в конструкцию допол­
ЮIТельный биморфный элемент
[171],
Обеспечение необходи­
мой мехаlПlческой связи между калибровочным и рабочим эле­
ментами осуществляется путем заполнения зазора между ними
npослойкой из эластичного термостойкого материала, например
силиконового каучука, В данном случае, создаваемые при калиб­
ровке деформации аналогичны рабочим, и :калибровочная кривая,
в пределах точности измерений, соответствует АЧХ, полученной
традиционным способом (рис, 7.19а). При кaJПIбровке биморф­
ного пьезоэлемента путем подачи сигнала на одну из его пластин,
характер частотной зависимости выходного сигнала (кривая
рис.
7.196) существенно
2 на рис. 7.196).
1 на
отличается от АЧХ такого акселерометра
(кривая
>"'ЮШ
-
I
1000
I
500
200 I
"/1
100
_2
-
-
-
\
.~
0,1
Рис.
7.19. АЧХ выходного сШ'Нала акселерометров при
0,5 В: а - для акселерометра
калибровочном напряжении
с парой биморфных элемеlПQВ с эласru:чной прослойкой;
б - для акселерометра с одним биморфным пьезоэлементом
при подаче напряжения на одну:из его пласru:н
186
7.4. AкEeдqmllempы со вcmроеннъпш доnOJmUJШ!Лънымu ycmроШ:mва,lIU
Мшшмум сигнала слева от резонанса обусловлен различиями
значений и знаков возникающих деформаций на разных участках
частотного диапазона, вызывающих полную взаимную компенса­
цию генерируемых зарядов на определенной частоте. Вследствие
чего, для проверки :коэффициента преобразоваЮIЯ может исполь­
зоваться выходной сигнал только в ограIlИЧенном диапазоне час­
тот, соответствующих горизонтальному участку калибровочной
кривой (В данном случае, примерно до
1 кГц).
Максимум выход­
ного сигнала практически совпадает с частотой установочного
резонанса акселерометра.
Известны также способы калибровки акселерометра, основан­
ные на ПРIШожении с:ил::ы: непосредствеюю к его
Шlерционному
элементу, что эквивалентно вщдействию определенного ус:коре­
IШЯ, Это достигается использованием встроенного в датчик элек­
тромапшта
[172]
или определенным расположением калибровоч­
ного пьезоэлемента, например, как в изображенном на рис,
7.20
сейсмоприемн:ике АК402, разработанном в Н:КТБ «Пьезоприбор»,
Рис. 7.20. Конструкция сейсмоприемника АК402;
1 - рабочий пъезоэлемет; 2 - калибровочный пъезоэлемет;
3 - вит; 4 - инерционный элемет; 5 - ШIата усилителей;
6 - магнитный блок; 7 - изолятор; 8 - :корпус; 9 - :кабель
Сейсмоприемник содержит стянутые винтом эле:rcrpически
изолированные четырехслойный рабочий и двухслойный калиб­
ровочный пьезоэлементы, между l\OТорыми расположен инерци-
187
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
онный элемент. В отдельном, залитом компаундом, отсеке кор­
пуса расположены СЗУ с фильтром верХЮlХ частот и оконечный
усилитель напряжения. ПитаЮlе усилителей, подача калибровоч­
ного напряжения и съем сигнала с рабочего пьезоэлемента осу­
ществляются по четыреxnpоводному экранированному кабелю,
помещеююму в металлорукав с внешней герметизирующей обо­
лочкой. Все эле:rcrpические цепи, кроме экрана кабеля, не имеют
гальванического контакта с корпусом. Корпус сейсмоприемЮlКЗ
выполнен из нержавеющей стали. Крепление на объекте произво­
дится четырьмя винтами М3 или посредством отъемного магнит­
ного блока, содержащего два постоянных магЮlта со встречной
ориентацией пomoсов.
При подаче переменного напряжения от внешнего ИСТОЧIПlКЗ
на калибровочный пьезоэлемент происходит его знакоперемен­
ная деформация и ВОЗЮlкзет сила, передающаяся рабоче:му пъе­
зоэлементу через инерЦИOlПlый элемент. При фиксированном
калибровочном напряжеЮlИ выходной СIП'НaJI сейсмоприемЮlКЗ
пропорционален его общему (с учетом усилительного тракта) ко­
эффициенту преобразоваIШЯ в рабочем диапазоне частот. Макси­
мальное значение выходной сигнал имеет на частоте установоч­
ного резонанса, что позволяет контролировать качество креIШе­
ния сейсмоприемникз на объекте.
Основные технические характеристики рассмотренных датчи­
ков с дополнительными устройствами приведены в табл.
7.9.
Таблица
7.9
Технические характеристики акселерометров
со встроениыми дополнительными устройствами
ХарактеРИСПlка
ТИП акселерометра
ДВб-301
АК402
Коэффициеш преобразоваЮlЯ;
преобразователя, пКл·м- 1 ·с 2
дlJГ1ШКa со встроенным усилителем, мВ'М ·J· c2
188
5
40
I
120
300
7.4. AкEeдqmllempы со вcmроеннъпш доnOJmUJШ!Лънымu ycmроШ:mва,lIU
Омнчанuе табл
Частаra установочного резонанса, кГц
79
28
20
2~8000
5-БООО
[25
4,5
Диапазон рабочих частот
(при неравномерности
6 %),
Гц
МаксИМaJIЬНое измеряемое виброускореIШе
(екз), М'О-'
Выходное напряжение (СКЗ) при подаче
кaJПIбровочного напряжеЮlЯ
5В
на частоте
l:кГц,мВ
-
ОКIШ,
4
%, не более
200
5
ОТ
Рабочий диапазон температур, ос
минус
от минус
50до
40 до 80
[20
Напряжение питания, В
[8~З6
Пarpебляемый ток, МА
2,5
5
0,[
Масса (с магнитным блоком), г
[5
250 (280)
Характерно; что серийно BьrnyCKaeMыe для широкого примене­
IПIЯ пьезоэлектрические акселерометры не содержат встроенных
калибровочных устройств. По-видимо:му, это связано с необходи­
мостью дополнительного усложнеЮIЯ виброизмерительных сис­
тем и еще не достаточным совершенством калибраторов,
Упоминая
но
отметить,
о
встроенных электронных устройствах, умест­
что
в
послеДЮIе
годы
появились
интелле:rcryаль­
ные датчики, в том числе и пьезоэлектрические акселерометры
[164,173,174],
ОЮI содержат встроеIПIые или внеIШIие электрон­
ные схемы, не только осуществляющие согласование импедансов
и преобразование аналогового сигнала в цифровую форму, но
и <<Интелле:rcryализирующие)) работу датчика путем цифровой об­
работки сигналов с использоваЮlем микропроцессора, Основная
цель «интеллекгуализацШf)) датчика
-
создаЮlе средства измере-
189
Пава
7.
КnНйllpyкцUU =елераuempoв с СQСnЩВНЬL'otU ЭJ/eкmраUamlUЧесЮLUU
nptюбразQваmeJm1lU
IПIЯ физической величины, максимально просто интегрируемого
в современные автоматические системы управления технологи­
ческm.ш: процессам:и (АСУТП) ИШI автоматические системы на­
учных измереlПlЙ (АСНИ), Задачи, которые решает резидентное
программное обеспечение интеллектуального датч:ика, в частнос­
ти пьезоэлектрического акселерометра, в основном представлены
следующm.ш: группами;
-
коррекция метрологических характеристик пьезоэлектричес­
кого электромехаlПlческого преобразователя;
-
вычисление вторичных параметров сигнала (виброскорости,
виброперемещеlПlЯ и др') и перевод их в другое представлеlПlе
(обычно, в частотное);
-
диarnостика преобразователя и системы электроники;
оргаffilзация ДВУХСТОРOlПlего обмена информацией с АСУШ
ИШI АСН:И при настройке и эксшryатации,
Несмотря на все положительные качества, достигаеhiIЫе с по­
мощью встраиваемых электрOlПlЫХ устройств, общим недостат­
ком таких датчиков является ограничеlПlе по температуре, В на­
стоящее время, в зависимости от исполнеlПlЯ применяемых в ак­
селерометрах электрOlПlЫХ устройств, их максимальная рабочая
температура, как правило, лежит в пределах
190
85-125
ос,
ГЛАВА
8
АКСЕЛЕРОМЕТРЫ С МОНОКЕРАМИЧЕСКИМ:И
И МОНQЛИТНЫМИ ПЬЕЗОЭЛЕКТРИЧЕСКИМИ
ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ
8.1. Пьезоэлектрические монокерампческие
преобразователи
из рассмотреlПlЯ факторов, ВЛИЯЮЩИХ на характеристики aк~
селерометров, логически вытекает один из путей их совершенс­
твования в части повышения стабильности метрологических:ха­
рактеристик и технологичности, В его основе лежит исключение
общего недостатка. характерного для всех пьезоэлектрических
элеIcrpомехаffilческих преобразователей составной :конструкции­
наличия межэлементных механических :контактных соединений
и разнородных по своим физическим свойствам материалов, Ре­
ализация такой конструкции может основываться на выполнении
преобразователя в виде блока из ПКМ,
Самым простым примером преобразователя ускореюIЯ, це­
ликом ВЫПQлнешюго из ПКМ, является простой пьезоэлемент
с присоединенньnш к его электродам выводами, установленный
непосредственно на КОНТРOШlpуеМQМ объеll....ге
[175],
Даже если
рассматриваемый пьезоэлемент установить внутри корпуса для
защиты от внешних воздействий, такая конструкция будет обла­
дать многими недостатками, преnятствующими ее практическому
применению для целей виброметрии, Прежде всего, это наличие
непосредственного
механического контакта поверхности пьезо­
элемента с объектом, повышенная чувствительность к деформа­
циям в месте его npисоединения и низкая эффективность npеоб­
разования. Названные недостатки в значительной мере можно
устранить, если пьезоактивную часть блока локализовать по вы­
соте и удалить от установочной поверхности для МИЮlмизации
отрицательного влияния свойств механического кoнтaкra.
191
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Модель такого преобразователя с продольной деформаци­
ей растяжения--<:жатия представлена в виде стержня из пкм
(рис.
8,1) высотой h, с электродами наполяризованной части, распо­
h! и h1 от установочной поверхности [93].
ложеннЬThПI на высотах
Рис.
8.1. Модель преобразователя
ускорения в виде стержня из IIКМ:
13-
основание;
2-
пьезоактивный слой;
:инерционный элемент;
4-
электрод
Если для упрощения рассматривать колебания такого стерж­
ня в одномерном приближении, не учитывая влияние эле:rcrpодов
и пьезоэффек.га на характер деформаций, то коэффициент преоб­
разования по напряжению в общем случае представляется в виде
двух сомножителей аналогично
(3,13) [95]:
sin[t-(2h-h2 -hj)]sm[ 2: (h 2 -h!)]
К"=2g зз Е,,
п
D
Х
ro2cos~
2ro,
х
roR"Сп
~1+ro'R;(C,+C,) ,
(8.1)
- скорость звука в ПКМ.
в 'Диапазоне рабочих частот, при достаточно малых значениях
где с
относительного изменения коэффициентов преобразования с час-
192
8.1. ПЬе3оэлеЮnJЩчеекuе ,UОНОКEp(L'IUческuе npeoбразоваmелu
тотой, последние представляются преобразоваIПIЫМИ выражени­
ями
(2.19), (2.20) [176]:
(8.2)
(8.3)
при электрической емкости пьезоэлемента
(8.4)
где р n
-
s -
плотность ПКМ;
площадь поперечного сечения пьезоактивного слоя;
h: фф = h - 0,5(h 1 + h) - эффективная высота инерЦИОIПюго эле­
мента,
В случае
h1 = h
(инерциOlПlЫЙ элемент отсугствует) будут
иметь место следующие выражения;
к: =1р"gззеззs,,(h-~),
(8.5)
К:. п =±Mn(h-h,)'.
(8.6)
(8.7)
Если зафиксировать высоту основания
h 1•
достаточную для
нормального функционирования преобразователя (в пределах от
0,2
до
0,4
диаметра), изменение относительной высоты пьезоа­
ктивной части h wи =
(h 1
-
h)/(h - h 1)
приводит к заметНОА-ry из­
менешпо некоторых характеристик преобразователя (рис, 8.2а),
ЕстествеIПIО, что его резонансная частота и верхняя грающа диа­
пазона рабочих частот при этом остаются без изменеIШЯ, Рост
емкости с уменьшением значения h
способствует расширенШQ
рабочего диапазона в сторону боле"; IПIЗКИХ: частот, Коэффици­
ент преобразования по заряду также существешю возрастает,
193
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Несмотря на снижение при этом КОЭффlЩиента преобразования
по напряженmo в режиме холостого хода, в условиях емкостной
нагрузки КD~к;,еCШI св~со(f--l),тоестьеCШl Сп~Со-С;,
(рис, 8,26). Следовательно, влияние емкостной нагрузки на изме­
нение КОЭффlЩиента преобразования по напряженmo снижается,
Таким образом, локализация в блоке из ПЮvl основных эле­
ментов преобразователя способствует повыmенШQ эффс:rcrивнос­
ти его работы, улучшенmo основных хаРЗlI..теристик и позволяет
варьировать их в достаточно пrnpоки:х пределах.
,
{)ШОСIП.СЦ.
10.1
5,0
2,0
1
-/
,/
2
l.!
э
;
4
-
,
02
1
Рис.
8.2. Влияние
относительной высоты пьезоактивноro
слоя на характеристики монокерамического преобразователя
ускорения: а
-
зависm.юсть характеристик от относиreльной
высоты пъезоактивного слоя;
l-ЦС;; 2 -К,/К;; 3 - /./ /.'; 4-К.!К;; 5 - /./f:;
б - влияние относительной емкостной нагрузки
на коэффициент преобразования по напряжению
Монокерамические преобразователи изготавJПlВают по приве­
денным в подглаве
194
1,3
технологиям сварки элементов из ПКМ.
8.1. ПЬе3оэлеЮnJЩчеекuе ,UОНОКEp(L'IUческuе npeoбразоваmелu
На рис,
8,3
по:казаны некоторые из монокерю.rn:ческих преоб­
разователей, серийно выпускаемых в НКТБ «Пьезоприбор»,
Для повышения эффективности преобразования, вместо пас­
сивного (неполяризованного) объема инерционного элемента,
можно
создать допomштельно один или несколько наполяризо­
ванных слоев,
Рис.
8.3. Образцы монокерамических npеобразователей
в этом случае, при оптимальном соотношении размеров, воз­
можно повышеffilе коэффициентов преобразоваЮIЯ по заряду IШИ
напряженШQ (при определеююй емкостной нагрузке), а также
собственной емкости по сравнеffilЮ с преобразователем тех же
габаритных размеров, содержащим однослойный пьезоэлемент,
Такой преобразователь ВЫПOJПlЯется в виде пакета из
n
пьезо­
активных слоев различной высоты с параллельно включенными
электродами, расположенными между ними
Рпс.
[177, 178]
(рис,
8.4).
8.4. Схема преобразователя
ускорения с дополюпe.JIЬJIЬThШ
пъезоактивными слоями
в объеме инерционного
элемента:
2-
1-
основание;
пъезоактивный слой;
3 -электрод
195
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Для достижения максимального коэффициента преобразова­
IПIЯ по напряжеffilЮ разности потенциалов каждого из отдельно
взятых слоев должны иметь равные значеlПlЯ, С этой целью высо-
:~:~~:Ь:~:::~~:~П;~:~=~:~h=~:~НО(8.8)
где
k- номер слоя со стороны свободного торца; k= 1,2, З, "" n.
В случае двух реализуемых пьезоаIcrИВНЫХ слоев (основного
:ад:==н:~П::а~;~~ О,61h л ; h"'2 = О,З9h л • где h л - общая высоТак как заряды параллельно соеДШlенных электрических ем­
костей суммируются, то, как следует из
(1.6),
коэффициент пре­
образования по заряду при неизменной общей высоте пьезоак­
тивной части будет пропорционален КОШlчеству ее параллельно
соеДШlенных слоев независи:мо от высоты каждого слоя.
Результаты экспериментальных исследований
[86]
показали,
что благодаря отсутствшо разнородных материалов, монокера­
мические преобразователи обладают более высокой темпера­
турной стабильностью основных метрологических характерис­
тик по сравненшо с аналогичными составными конструкциями
(табл.
8.1).
Монокерамические преобразователи более технологичны по
сравнеmпo с традИЦИOlПlыми составными конструкциями, так как
при их производстве допускается более ffilЗКИЙ класс обработки
сопрягае:мых поверхностей элементов, Кроме того, керамическое
основаЮlе обеспечивает электрическую изоляцию прилегающего
электрода от корпуса.
196
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
Таблица
8.1
Средние значения относительиого изменения характеристик
преобразователей с пьезоэлементами из пк'м ЦТС-8ЗГ
в диапазоне температур от
Материал
25 до 175 ос
Относительное
изменение, %
Соединение
инерционного
Дюрашо­
миний
Клеевое
Сrшав ВlПv1
Упругое
поджатие
ЦТС-83Г
T:~~t~:-
f,
К.
К,
-9,5
8,0
19,0
-11,0
10,5
14,0
-3,5
-7,0
10,5
8.2. Пьезоэлектрические монолитные преобразователи
8.2.1.
Особенности построения пьезоэлектрических
монолuтных nреобразователей
Выполнение преобразователя в виде едlПЮГО монолитного бло­
ка из ПКМ с локализованными в нем необходимыми пассивн:ьп.ш:
(неполяризованн:ыми) и пьезочувствительными (наполяризован­
ными) зонами с элеR"I']JОДами, не нарушающими целостность бло­
ка, позволяет полностью искmoчить в нем наличие механических
контактных соединеIПIЙ и их отрицательное влияние на стабиль­
ность метрологических характеристик, для этой Цe.JШ элеR"I']JОДЫ
ВЬП10ЛНЯЮТСЯ в виде токопроводящего покрытия внутри полос­
тей, расположенных в теле блока
[179],
Конфигурация и распо­
ложеIПIе полостей позволяют создать в блоке заданный характер
распределения электрических полей при поляризации и механи­
ческих напряжеffilЙ, возникающих под действием инерционных
сил, вызванных ускорением, Кроме того, полости могут служить
197
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
для коммутации эле:rcrpодов, присоединения и фиксации выводов
[18(1-183].
На рис,
8.5
приведены схемы основных вариантов образова­
IПIЯ пьезоаIcrИВНЫХ зон в монолитных блоках-преобразователях
(МБП) и характер распределеlПlЯ эле:rcrpического поля при поля­
ризации,
Используются следующие комбинации при образовании пье­
зоактивных зон;
-
посредством пар (рис, 8.5а) или групп (рис,
8,56) разнополяр­
НЫХ электродов, расположеlПlЫХ во внутренних полостях блока;
-
комбинацией разнополярных внугреlПlИХ и внешних электро­
дов, нанесенных на внепrnюю поверхность блока (рис. 8.5в, 8.5г),
Наличие ТОКОПРОВОДЯIЦего покрытия внутри полостей, благо­
даря его малой толщине (несколько нанометров) и незначитель­
ной жесткости, не создает в блоке дополнительных механических
напряжений, влияющих на его работу,
Рис.
8.5. Варианты образования пьезоактивных
1 - тело блока; 2, 3 - полость;
4 - внутренний электрод; 5, 6 - внешний электрод
зон 1vIБП:
198
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
ПРИНЦШIИально возможно реализовать МБП с тремя видами
деформации nьезоактивной зоны
ба и сдвига (рис.
[86]:
растяжения--<:жатия, изги­
8,6),
В варианте схемы :м::БП с продольной деформацией растяже­
IПIЯ--<:жатия (рабочий пьезомодуль dзз ) пьезоактивная зона, лежа­
щая между основанием и инерЦИOlПlым элементом, ограIШЧена
двумя разнополярны:ми группами внугреmшх эле:ктродов, парал­
лельных (рис. 8.6а).
При поперечной деформации растяжения--<:жатия (рабочий
пьезомодуль dл ) пьезоактивная зона расположена между внут­
решlИМ и внешними эле:ктродами, перпендикулярными устано­
вочной поверхности (рис,
Рис.
8.66),
8.6. Варианты базовых схем МБП:
а, б - с деформацией растяжеНИЯ--i;жатия;
8, г - с деформацией изгиба; д - с деформацией сдвига;
1-
пьезоактивная зона;
элемент;
4-
2-
основание;
внутренний электрод;
5-
3-
:инерционный
внешний элеI<.."'I"pОД
(стрелками обозначено направление Beкropa поляризованности)
Пьезоактивная зона :м::БП с деформацией изгиба (рабочий
nьезо]"юдуль dл), расположенная между внешними электрода-
199
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
ми, разделена пополам внутрешшм электродом, Инерционный
элемент может быть ВЬПIолнен в виде прилива, а основание
-
в виде центрального высryпа, Слои пьеЗОaIcrивной зоны, в зави­
симости от способа их вкmoчения, имеют встречную (рис,
8.68)
или однонаправленную поляризованность, При последователь­
ном соеДlшешш слоев, как изображено на рисунке, внутрешшй
электрод является технологическим и
используется только для
поляризации. Возможно ВЬПIолнение МБП с деформацией изгиба,
содержащего только
внеIШIие элеIcrpОДЫ в виде системы полос
(рис, 8.6г), позволяющих получить тангенциальную поляризован­
ность в поверхностных слоях пьезоактивной зоны, Деформации,
создающиеся при изгибе, направлены вдоль результирующего
вектора поляризованности (рабочий пьезомодуль dз),
В варианте Iv1БП с деформацией сдвига (рабочий пьезомодуль
пьезоактивная зона огршшчена использующи:м:ися только для
d 15 )
съема элеIcrpического сигнала группами внутрешшх разнополяр­
ных электродов, вдоль которых направлен вектор поляризован­
ности (рис, 8.6д). Центральная часть блока является основанием,
а периферийная
-
Шlерционным элементом.
Классификация конструктивных схем Iv1БП
рис.
[86]
приведена на
8,7,
При конструировании Iv1БП могут использоваться различные
комбинации элементов рассмотренных базовых схем и их моди­
фикации, Возможные КОНСТРj'ICI'ивные схемы Iv1БП укрупнено
разделяются по следующим четырем основным признакам:
- типу рабочей деформации пьезоактивной зоны;
- типу электродов;
-
200
количеству пьезоактивных зон;
способу крепления.
8.2.
Рис.
8.2.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
8.7. Классификация :конструктивных схем МБП
А"'онструкцuu монолитных блокnв-nреобразователей
для получеIПIЯ высоких метрологических и эксплуатационных
характеристик акселерометров конструкции :м:БП ДОЛЖНЫ обеспечивать:
-
надежный постоянный механический контакт с сопрягаемым
201
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
телом (контролируемым объектом, переходным элементом или
основанием корпуса), предназначеlПlЫМ для их крепления;
-
минимальное влияние на nьезоактивную зону со стороны со­
прягаемого тела и механического контакта с ним;
-
надежный электрический контакт между электродами блока
и проводниками соеДlПlIfТeJIЬНОГО кабеля;
-
качественную
электрическую
ИЗОЛЯЦИЮ
от
сопрягаемого
тела всех электродов при CI-JJ\П.IIетричном выходе или по крайней
мере Од;Ilой группы эквипотенциальных электродов (при неизоли­
роваlПlом несимметричном выходе);
-
технологичность изготовления и монтажа.
При II..-реплении JvIБП используется установочная поверхность
его основания. Непосредственный механический контакт сопря­
гаемого тела с пьезоактивной зоной и lПIерционным элементом
не допускается, Механическое соединение может быть :клеевым,
паяным, сварным или упруго поджатым через центральную или
периферийнyIO части основания блока,
Электрическое соеДlПlение электродов в группах осуществля­
ется токопроводящим металлическим покрытием, нанесенным на
внеIШIЮЮ поверхность блока или в специальных коммутацион­
ных полостях.
Для съема сиrnaла используются проволочные проводники,
впаянные в электродные, ком:мутационные или специально вы­
полнеlПlые ДЛЯ этого метaшrnзированные полости, Возможно
применение промежуточной контактной площадки с переход­
ны::ми контактами, расположенной между сопрягаемым телом
и установочной поверХНОСТЬЮ блока.
На основе рассмотреlПlЫХ ПРИlЩипов построения МОНОШlтных
преобразователей, в Н:КТБ (Пьезоприбор)) совместно с НПО из­
мерительной техники разработаны различные конструкции МБП
и акселерометры на их основе. Некоторые из них приведены
в настоящей главе,
На рис,
[179].
202
8.8
и
8,9
изображены варианты JvIБП группы м-о?
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
Рис.
а
6-
-
8.8.
МЕП грyш:rы М-О7:
:конструктивная схема;
внешний вид МЕП ТШIa
M-0701
Рис. 8.9.:rvtБп тшюв М-О704 (а) и М-О705
(6)
МЕП содержат систему радиальных эле:rcrpодных
КОhiThryтационных полостей
2, 3,
1
и осевых
на внутренние поверхности ко­
торых нанесено токопроводящее по:крытие
4.
Участки блока
5, 6
203
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
и
7
выполняют функции пьезоактивной зоны с продольной де­
фор:мацией растяжения--сжатия, основания и lПIерционного эле­
мента соответственно. Съем сигнала осуществляется проволоч­
ными выводами
8,
Крепление М-О701 и М-О704 осуществляется приклеиванием,
ВЬШOJПlение М-О704 и М-О706 в форме усеченного конуса спо­
собствует повышению резонансной частоты и уровня предельно­
го ускорения
[184],
ОсноваIШе М-О705 имеет фланец для креп­
ления посредством периферийного поджатия. rvIБП группы М-О7
предназначены для измерения вибрациоlПlЫХ и ударных ускоре­
IШй в диапазонах средIШХ и высоких частот (табл,
8.2),
Таблица
8.2
Характеристики l\tIБП с продольной деформацией
растяжения-сжатия
Характеристика
ТипJ\IJБП
М-0701
М-0704
М-0705
0,30
0,85
0,15
0,50
0,20
0,75
Коэффициент преобразования:
по заряду, пКл·м- 1 ·с 2
по напряженmo, MB·M·1·c2
Частота установочного
резонанса, кГц
Эле:r...1рическая емкость, нФ
ОКIШ,
%,
70
90
80
0,35
0,25
5
0,25
ие более
Максимальная рабочая
температура, ос
120
250
Предельное измеряемое
ускорение,
103 м·с-2 ;
вибрационное
ударное
пкм
Габаритные размеры, мм
Масса,г
204
20
80
40
150
ЦТС-19
ено х
5,5
10
40
150
ЦТС-83г
!2:I8x6
08
2,7
х
8,5
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
Примерами МБП с рабочей деформацией поперечного рас­
тяжеlПlЯ--сжатия являются устройства типов М-08, М-О9, М-I0
иМ-14.
МБП группы М-08
[183, 185]
ВЫПOJПlен в виде цилиндричес­
кого блока с симметрично расположенными относительно про­
дольной оси шестью клшювидными полостями, внутри которых
нанесены электроды
1 (рис, 8.10),
Рис.
8.10, МБП rpyrшы М-О8:
а - :конструктивная схема; б - электрическая
схема m:м:мутации эле:r...1рОДОВ; в
-
внешний вид
МБП ТJПIа М-О803
Полости разделяют пьезоактивные зоны
2
прямоугольного се­
чеlПlЯ и через одну сообщаются между собой коммутационными
каналами
3,
обеспечивающm.ш: параллельное электрическое со­
ещrnение эквипотенциальных электродов, Участки
4
и
5
блока
являются, соответственно, инерционным элементом и основани-
205
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
ем, в котором выполнены продольные каналы
выводов
7.
6 для проволочных
Возможно :крепление приклеиванием или поджатием
флaIща основания.
В МБП гpyrnrы М-I0
ных зон
1 (рис. 8,11)
коммутация элек.гродов пьезоактив­
[186]
осуществляется токопроводящm.m дорожка­
ми 2,3, расположенными на образующих поверхностях инерцион­
ного элемента
и основaIOiЯ
4
5,
Помимо приклеивания, возможно
поджатие МБП винтом, ПРОХОДЯЩИМ через центр основания, С этой
целью в блоке выполнена осевая полость
rи
6 ..
2,
.
6 ступенчатого сечения.
4
_. '.t-'i ч
~~:.!!I
~
3
'--1
'
,:,7:0,
-.--6)
~
"
~I: ,О
Рис.
1
0>-'
,
\'
5
,
"3
8.11. МБП группы М-l О:
а
-
:конструктивная схема;
6 -внешний вид МБП TmIaM-I001
МБП групп М-О8 и М-l О предназначены для измерения вибра­
ционного ускорения среднего уровня в диапазонах низких и сред­
ШlХ частот (там,
8.3).
МБП группы М-О9
[179]
имеет форму прямоyroльного парал­
лелепипеда с двумя цилиндрическими коаксиальными элек.гро­
дными полостями
nьезоактивная
206
1,2 (рис. 8.12), между КОТОРЬDШ расположена
зона 3 с радиальным направлеIШем поляризован-
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
ности. Центры масс инерционного элемента
4
и пьезоактивной
зоны совмещены, что способствует снижеlПlЮ влияния попереч­
ного и углового ускореlПlЙ.
Таблица
8.3
Характеристики I.\fБП с поперечной деформацией
растяжения-сжатия (с КЛИНОВlIДНЫМИ элеk.'ТрОДНЫМП
полостями)
ТипМЕП
Характеристика
М-0803
М-0805
М-[ОО[
0,60
0,75
[,40
[,50
0,60
0,75
КоЭффlЩИенг пре06разования;
по заряду, пКл·м· 1 ·с 2
по НШ1ряженmo,
MB·M·1·c2
Частота установочного
I резонанса,
кГц
Элекгрическая емкость, нФ
ОКIП1,
%,
не более
Максимальная рабочая
те],шература, ос
60
30
55
0,80
5
0,90
6
0,85
7
250
[20
250
Предельное измеряемое
ускорение,
103
м·с- 2 ;
вибрационное
ударное
IIКМ
Габаритные размеры, МIl.I
Масса, г
[5
25
[О
[5
25
ЦТС-8ЗГ
ЦТС-[9
ЦТС-83Г
012х9
7
012
Используя различные ГРaIШ основания
х
8,[
5,7
5,
13,5
013
х
9,5
6,9
возможно крепле­
lПIе МЕП с направлением его оси чувствительности перпенди­
кулярно или параллельно поверхности контролируемого объекта
(рис.
8.[26).
МЕП группы М-14
[187]
представляют собой пьезокерами­
ческий блок цилиндрической формы с внутренней полостью
1
207
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
(рис,
8.13) в виде усеченного
конуса. На внешmoю и внутреннюю
поверхности нанесены эле:rcrpоды
2, 3 пьезоактивной зоны 4, пе­
5, 6 на внешнем торце
реходящие в концентрические кomaIcrbl
основания
предназначенные для съема сигнала, КреШIеЮlе
7,
МБП осуществляется через двухконтактный токосъемЮlК вин­
том, проходящим через осевое отверстие ОСНОБаIПlЯ,
Рис.
8.12, МЕП гpyrmы М-О9:
схема;
в
6-
а
-
конструктивная
вариaIПЫ креШIения на объекте;
внешний вид МЕП пmа М-О901
-
l
~ б~
!
\"("4
.2
':---i.!.,/
,
!,
: \
:
--Г-, '~"
,
,
:
Рис.
схема;
~
-
'/
208
,'р,:
"
i ',;:
'_
7
5
8.13. МЕП гpyrmы M-14: а-конструктивная
6 -внешний вид:м:БП типов M-1404 и M-1405
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
Использование в качестве инерциоIПЮГО элемента массы, рас­
пределешюй в объеме пьезоаrcrивной зоны, И перемешюе сечение
стенок способствуют повышению частот продольного И попереч­
ного резонансов, а также вибрационной и ударной прочности.
МБП группы М-14 предназначены для измерения вибрацион­
ных и ударных ускорений высокого уровня в диапазонах средних
и высоких частот,
Основные теХlПlческие характеристики МБП с ЦИJПlНдриче­
ской nьезоактивной зоной представлены в табл.
8.4.
Таблица
8.4
ХарактеРПClllКII МБП е поперечной деформацией
растяжеПИЯ--i,:жатия (е щшпндричеекой пъезоактпвной зоной)
Харaкreристика
ТипМБП
M-0901
М-0902
M-1404
M-1405
1,20
0,70
0,60
0,50
0,20
0,15
0,10
0,10
Коэффициент
преобразования,
не менее;
по заряду, пJ(л.м-I ·с 2
ПО напряжеmпo, :mB.m-I.~
Частота установочного
резонанса, кГц
Электрическая емкость,
нФ, не менее
ОКПП,
40
45
70
80
1,8
1,1
1,4
1,1
%, не более
Максимальная рабочая
120
те!Шература, ос
250
Пред!Шыюе :измерJlемое
ускорение, IОЗм·с-2:
ви6рацИОlПюе
50
200
ударное
пкм
Габаритные размеры, :мм
Масса, г
ЦТС-19
14 х 14 х 14
19,2
11
70
300
ЦТС-83Г
х
11
8,8
х
11
08
х
1,8
8
08
х6
1,3
209
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
МБП грyrш М-12 (рис.
цией изгиба
[184, 188], по
8.14, 8.15)
и М-В с рабочей деформа­
сравнеЮlЮ с компрессионными, харак­
теризуются более высокими значениями коэффициента преобра­
зования по заряду и малым ОКПП.
Пьезоактивная зона
1, расположеlПlая между кольцевым lПIер­
2 и основаЮlем З, образована системой вне­
5. ПослеДIШе, являясь техноло­
нанесены в радиальных цилиндрических полостях 6
ЦИОlПIым элементом
ШЮlХ
4
и внутреmшх электродов
гичес:кmш:,
малого диаметра и служат для поляризации участков пьезоактив­
ной зоны во встречных направлениях, Радиальные разрезы в зоне
lПIерционного элемента обеспечивают более свободный изгиб
пьезоактивной области при работе преобразователя.
А-А
2~.4.\.
__ "
n'=са
Рис.
8.14. Конструктивная схема JvfБП группы M-12
Рис. 8.15.:tvIБп тшюв
210
M-1204 И M-1206
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
8.2.
МБП типа М-В имеют аналогичную конструкцmo и отли­
чаются
(рис.
отсутствием
допomштeлъного
инерЦИОIПюго
элемента
8.16).
Рис.
8.16. МБП ТJШОВ М-130З, М-1301
и М-1305
РассмотреIПIые МБП с деформацией изmба предназначены
для измерения ви6рациоlПIЫX ускорений малого и среднего уров­
ней в диапазонах ЮIЗКИХ и среДIШX частот, их основные теXJШЧес­
кие характеристики представлены в та6л,
85 и 8.6,
Таблица
8.5
ХарактеРИCnIКИ ]ИБП с деформацией изгиба (группа М-12)
Характеристика
ТШIМБП
М·1202
М-1204
М-1206
M-1202T
3,9
3,2
12,0
6,5
1,6
2,0
0,3
0,9
Коэффициент прео6разования:;
по заряду, пКл·м-I ·с 2
по напряжешпо, mB·m-I ·с2
Частота установочного
резонанса, кГц
Электрическая емкость,
нФ
14
12
25
14
1,2
1,9
0,8
0,3
ОКПП,%
0,5-1,5
1,5-2,5
250
400
Макс:имапьная рабочая
те:r.шература, ос
Предельное измеряемое
вибрацИOlшое ускореlШе,
IОз м · с....2
пкм
Габаритные размеры, мм
Масса, г
те·83Г
019 х 7,5
7,0
022
х
88
7,5
ТВ-2
014х
3,5
6
019х7,5
6,5
2ll
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Повышение эффеR"I'ИВНОСТИ преобразования и расширение
функциональных возможностей МБП может осуществляться пу­
тем создания в объеме инерЦИОlПюго элемента ДОПОJПIительных
поляризованных участков (рис,
В
качестве
МБП
с
примера
(рис.
ДОПОJПштельной
8.17),
8.17а)
приведена
пьезоактивной
ент преобразования по заряду и
конструкция
зоной.
Коэффици­
эле:rcrpическая емкость та­
кого преобразователя, ВЬПIOJПIенного
в габаритах МБП типа
М-О701, при параллельном в:ключеlПlИ пьезозrcrивных зон воз­
растают в
1,6
раза. В другой модификации МБП (рис.
8.176)
8,
ПOJПlительная пьезоаrcrивная зона с внеШIПlМ электродом
до­
об­
разованная поляризацией всего объема инерционного элемента,
предназначена для использования в качестве калибровочного элемента,
Таблица
8.6
ХарактеРИСПIКИ JИБП с деформацией изгиба (группа М-В)
ХарактеРИСПlка
КоЭффlЩиент преобразования:
по заряду, пЮн.г 1 ·с 2
по напряженюо, мВ,м· 1 ·с 2
ТипМБП
М-1З01
М-ВОЗ
М-1З05
2,6
1,6
1,7
1,4
4,9
2,5
0,5
0,7
20
1,6
1,2
19
1,9
1,0-2,0
37
0,8
Частота установочного
резонанса, кГц
Элекгрическая емкость, нФ
оюm,%
Максимальная рабочая
те],шература, ос
120
250
Предельное измеряемое
вибрационное ускорение,
8
6
9
I03 m·c-2
пкм
Габариrные размеры, мм
Масса, г
212
ЦТС-19
019 х4
4,5
ЦТС-8ЗГ
022х5
I
5,9
014x4
1,9
8.2.
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
8.17. Конструктивные схемы NIБП
1 - основание;
3 - дополнительная
пьезоllЮ"ИВная зона; 4 - неполяризованный участок
инерционного элемента; 5 - электродная полость;
6, 7 - коммутационная полость; 8 - внешний электрод
Рис.
с дополmrrельной пъезоактивной зоной;
2-
основная пъезоактивная зона;
ПО стабильности метрологических характеристик к внешним
воздействиям,
включая
температуру,
динамические
нагрузки
и проникающее излучение, МБП от двух до десяти раз превос­
ходят составные и монокерамические электромеханические пре­
образователи, пьезоэлементы которых вьшолнены из тех же со­
ставов пкм
[66, 86, 113],
Вместе с тем, в зависимости от конс­
трукции, МБП могут уступать им по значениям коэффициентов
преобразования и электрической емкости,
8.2.3.
Особенности технологии изготовления монолитных
блокnв-nреобразователей
Использование для изroroвлеIШЯ заготовок JvlБП технологии
прессования с последующим обжигом
[3],
широко при:меняемой
при ПРОИЗВОДстве пьезоэлементов простой конфигурации, сопря­
жено с чрезвычайной трудоемкостью последующей мехаЮlче­
ской обработки, Свободной от этого недостатка является техно­
логия IШIикерного горячего литья под давлеЮlем
[30, 189, 190],
213
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Этот метод отличается высокой производитеЛЬНОСТЬЮ, позволяет
получать ИЗДeшIЯ из П:К практически любой формы при высокой
точности изготовления керамической заготовки. Технологиче­
ский процесс состоит из следующих основных операций:
-
приготовление шликера путем смешивания, предварительно
синтезированного и размолотого порошка ПКМ, со связкой на ос­
нове парафина;
-
литье шли:кера в литейную форму при температуре
под давлением
0,4--0,7
75-90
ос
Па, где он остывает до твердого состоя-
пия;
-
удалеЮlе связки из извлечешюй заготовки путем медленного
нагрева до температуры
700-900 ос,
при которой происходит час­
тичное спекание порошка;
-
обжиг в печи для полного спекания порошка;
механическая обработка (обрабатывается только установоч-
ная поверхность блока или все его внешние поверхности);
-
нанесение эле:rcrpодов;
поляризация.
ПьезоактИВНОСТЬ ПЮvl и ее устойчивость определяются многи­
ми факторm.ш, к числу которых, кроме индивидуальных свойств
составов, можно отнести режим поляризации, характеризующий­
ся прежде всего температурой и напряжеlПlОСТЬЮ электрического
поля. Цель оптимизации режима поляризации пьезоактивной зоны
заключается в том, чтобы, наряду с достижеlПlем максимального
КОЭффlЩиента преобразования и его стабильности, МШlИмизиро­
вать значения ОКПП, КВДО и влияние процессов, происходящих
на границе креплеlПlЯ Iv1БП. для этого необходимо выполнеlПlе
следующих условий:
-
напряжеlПlОСТЬ поляризующего поля в местах его наиболь­
шей концентрации, вызванной расположением и формой элект­
родов МБП, не должна превьппать предела электрической про­
чностиПКМ;
-
поляризованность пьезоактивной зоны должна быть близка
к предельной при максимальной од;нородности во всем ее объеме;
214
8.2.
-
ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwрuэoвшneлu
поляризованность пассивных участков блока (прежде всего
основания), ВОЗЮПffiЮЩая за счет краевого эффекта электродов,
должна максимально убывать по мере удаления от границы пье~
зоактивной зоны, быть :ШППlмальной в местах значительных Me~
ХaIшческих: напряжений и особеmю в6.rnIзи установочной поверх­
ности,
Для поляризации пьезоmcrивной зоны целесообразно исполь·
зование процесса так называемой «горячей)) поляризации при
температуре вьппе
100
"С, обеспечивающего максимальные зна·
чения пьезомодулей и их высокую стабильность, Время закреп·
ления доменной структуры керамики после такой поляризации
в несколько раз меньше, чем у поляризованной при более ffilЗКИХ:
температурах
[6].
Значение пьеЗОА-ЮДУЛЯ в любом макрообьеме МБП может быть
определено, исходя из зависимости пьезомодуля от поляризую·
щего электрического поля и
xapmcrepa
его распределения, об~
условленного конфигурацией системы электродов, На рис,
8.18
приведены экспериментально полученные зависимости пьезомо~
дулей dзз и dл от напряженности поляризующего поля ЕШJЛ искус·
d;/d",
Рис.
8.18. Зависmюсти пьезоМОДУ­
лей от напряженности поляризую­
0,6
t-t-+-l--!-t---i-'-1
щего поля:
3, 4 -
1,2 -dзз иd31 ЦТС·19;
d 31 ЦТС·83Г
dзз И
0,2 t-I'-'cт'-+-j-:---+-+
215
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
ственно состаренных образцов ЦТС-19 и ЦТС-8ЗГ, поляризован­
ных при
140
"С в течение
15 минут,
Значения dз. нормированы на
конечные значения dзз ' соответствующего cocfaBa, полученные
приЕ
~
10kB·cm-' [86].
Пр';' указанном режиме поляризации, критические поля Екр, I
=о:~~I~л:~~ ~K~~~~~::~o=~Ь:T з:=:нопы1оo
и
12 kE·Cm- 1 соответственно.
В JvIБП с продольной деформацией растяжения--сжатия (груп­
па М-07), :как показало физическое моделирование, поляризу­
ющее поле за пределами экраmqJOВано электродами, В данном
случае, увеличение напряженности поля выше критического со­
провождается возрастанием пьезО~IOДУЛЯ участков пьезоактивной
зоны, удаленных от электродов, что повышает однородность ее
поляризованности. Учитывая концентрацию напряжеlПlОСТИ поля
вблизи цилиндрических электродов, максимальное напряжеIПIе,
прrшоженное к электродам, не должно превышать
Umn
где
(8.9)
=O,5(h,,-2r)Е~,
hn - расСТОЯIПIе между разнополярными электродами;
r - радиус электрода;
Еор - предельное электрическое поле для П:КМ при соответ­
ствующих температуре и времени поляризации,
В JvIБП с поперечной дефОР~IaЦией (группы М-08, М-I0
и М-14) электрическое поле распространяется за пределы пье­
зоактивной зоны и, в зависимости от приложеIПIОГО к электро­
дам напряжения, наблюдается разШlЧНЫЙ характер поляризован­
НОСТИ функциональных участков блока, Для таких конструкций
существует
Eonт =
оптимальная
(0,7 -
напряжеlПlОСТЬ
поляризующего
поля
0,9)Екр' при которой поляризоваIПIОСТЬ керaшl­
ки во всем объеме пьезоактивной зоны близка к предельной,
а в объемах инерционного элемента и основания
(рис.
216
8.19).
-
МlПIимальна
8.2. ПЬeзQЭJlекmРUЧlXкuе ,uощmumllые nрwраэо/шmeлu
1
2
г--~
г--'_
~I
i" ..
I
,
Относительные значения dЗ1
m -оmО.9до1,О
[11
-оmО,75доО,9
О -оmО,5доО,75
'_..
_.
Рис.
,
D
,--'
_.
-менееО.5
8.19. Характер распределения относительного значения
пьезоМОдуля dз ! в объеме МБП гpyтrn М-О8 и М-I О
при различной напряженности поляризующего поля:
a-дляЦТС-19; б-для ЦТС-83Г;
l-ЕпOll = зо
kB.cm-1;
в качестве примера на рис,
8.20
2-ЕПilll = Еопт
приведены эксперименталь·
НО полученные зависимости ряда характеристик МЕП типа
М-О803 от напряженности поляризующего поля. Поляризация
оптимальным полем напряженностью
9,2
кВ'с],г! (около О.8Екр)
при незначительном снижении коэффициентов преобразова­
НИЯ, позволяет существенно снизить значения О:КПП и КВДО
(табл.
8.7).
Аналогичный эффект проявляется при поляризации с опти­
мальной напряженностью поля других ТШIОВ JvlБП С поперечной
деформацией растяжения---(:жатия,
217
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
ОlLlUСИ"l.ед.
I,'/',
Рис.
8.20. Зависимость характерисПlК МЕП
Пlпа М-О803 от напряженносПl поляризующего
поля:
1 - коэффициент преобразования
2 - коэффициент npеобразования
3 - ОКПП; 4 - КВДО;
5 - электрическая емкость
по заряду;
по напряженmo;
Таблица
8.7
Относительные значения характеристик 1\fБП
типа М-О80З из ЦТС-8ЗГ при различной напряжеННОCnI
поляризующего поля
Напряженность поля,
Харaкreристика
kB·c:m-1
8,0
9,2 (Е,,")
12,0 (Екр)
30,0 (0,8Е"р)
0,78
0,80
0,48
0,73
0,98
0,90
0,92
0,58
0,77
0,99
1,0
1,0
0,95
0,97
1,0
1,0
0,98
1,21
1,25
1,20
Коэфф!щиеlfГ
прео6разования:
по заряду
по напряжению
ОКПП
КВДО
ЭлеIcrJ'ическая: емкость
218
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
8.3. Акселерометры
на основе монолитных
и монокерамнческнх 6локов-преобразователей
8.3.1.
Конструктивные особенности блочных акселерометров
Непосредственное применеlПlе МБП в качестве акселерометра
напрaкrи:ке ограничено недостаточной их защищенностью от BHe~
ШlПlх воздействий, Однако в ряде случаев возможно встраивание
МБП в различные конструкции, если при этом обеспечивается не­
обходимая защита и возможность подключения соедиlПlтельной
линии, для широкого практического применения целесообразно
использоваlПlе МБП в качестве преобразующих элементов 6лоч­
ных:конструкций акселерометров, которыевзависимости отназна~
чения и условий эксплуатации можно разделить на три :КOHCТPYК~
тивные группы
(рис.
[86]:
бес:корпусные, полукорпусные и :корпусные
8.21).
Рис.
8_21. Схемы
основных конструктивных гpyтrn блочных
акселерометров: а
в
3-
-
корпусной;
1-
-
бескорпусной; б - полукорпусной;
МБП;
2-
диэлектрический поделой;
металлическое покрытие;
5-
защитный кожух;
7-
4 - соединительный кабель;
6 - основание корпуса;
кръшrкa корпуса
ВО всех блочных :конструкциях акселерометров, независимо от
их исполнеlПlЯ, обеспечиваются электростатическое э:кранирова~
lПIе пьезоаll..""ТИВНОЙ зоны и защита от проникновения влаги.
219
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
8.3.2.
Бескорпусные блочные а«селеромеmры
Основные отличительные признаки бескорпусных блочных
акселерометров;
-
герметизация внутренЮlХ полостей МБП посредством час­
тичного или полного (если это не вызывает механического шун­
тирования пьезоактивной зоны) их заполнения диэлектрическим
материалом;
-
экршшроваЮlе rvrБП металлическим по:крытием, нанесен­
ным на его внешlПOЮ поверхность непосредствеюю IШИ на ди­
электрический подслой;
-
использование для :креплеЮIЯ на контролируемом объекте
установочной поверхности основаЮIЯ МБП.
КреплеЮlе
бес корпусных
приклеиванием,
но
акселерометров
пршщипиально
возможны
осуществляется
варианты
с
ис­
пользоваЮlем накидного фланца, сквозного винта или иных при­
способлений,
Примерами бескорпусного исполнения могут служить блоч­
ные акселерометры АВ-О702Б и АС-О902Б (табл,
8.8), выполнен­
[86],
8.22) с изолироваIПIЫМ выхо­
дом, МБП 1 с присоединенным кабелем 2 опрессован стеклоплас­
тическим материалом 3 типа АГ -4С, имеющим высокие прочност­
ные на основе МБП тшюв М-О703 и М-О902
В акселерометре АВ-О702Б (рис,
ные, диэлектрические и температурные характеристики, Этот
материал хорошо соединяется с блоком, полностью заполняя все
полости, одновременно с герметизацией обеспечивает надежное
закрепление кабеля и ИЗО1Шрует электроды от экранирующего ме­
таллического покрытия
4, нанесенного на внешmoю
поверхность
акселерометра,
Акселерометр АС-О902Б (рис,
8,23) с экранирующим металли­
ческим покрытием, нанесеIПIЫМ на внешние поверхности блока
и стеклопластика, имеет несимметричный выход,
220
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
Рис_
8_22. Конструкция блочного
бескорпусного акселерометра АВ-О702Б:
1-
МЕП;
4-
Рис.
8_23.
23-
соединительный кабель;
стеКЛОШIaСТИК;
металлическое покрытие
Конструкция блочного бескорпусного
акселерометра АС-О902Б:
13-
МЕП;
2-
соединительный кабель;
стеКЛOIшастик;
4-
металлическое покрьпие
221
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Таблица
8.8
Основиые техиические характеристики рассмотреиных
блочиых бескорпусиых акселерометров
Тип акселерометра
Характеристика
АВ-0702Б
АС-0902Б
0,5
0,6
0,60
0,45
Коэффициеm npеобразования:
по заряду, пКл·~гl·с2
по напряженmo, мВ·м· 1 ·с 2
Частота установочного резонанса, кГц
ОКIПI,
%
Электрическая емкость, ПФ
Предельное ускорение,
80
38
5-7
0,38
5-7
1,2
3,5
12,0
1,5
2,0
1()4 м·с-2 ;
вибрационное
ударное
Предельная температура, ос
Масса без кабеля, г
Основными
ДОСТQlПlСТВами
150
4,2
бескорпусных
9,5
акселерометров
следует считать их небольшие габариты и массу, высокую резо­
нансную частоту, которые 6mIзки к соответствующим собствен­
ным характеристикам МЕП, Благодаря отсутствmo в конструкции
массивных металлических деталей обеспечивается минимальная
чувствительность к переменному магнитному полю. Еескорпус­
ные акселерометры просты в изготовлении, так как содержат ми­
ffilмальное КQШIчество деталей,
К недостаткам относятся слабая защищешlOСТЬ от внешних
меХЗЮlческих воздействий и деформаций со стороны контроли­
руемого объе:rcrа, ограничешlOСТЬ способов крепления.
Для условий эксплуатации, требованиям которых не удовлет­
воряют бескорпусные конструкции, целесообразно использовать
полукорпусные или корпусные акселерометры,
222
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
8.3.3. Полукорпусные блочные акселерометры
Полукорпусные акселерометры (табл.
8.9) являются
промежу~
точным вариантом между бескорпусн:ы::ми и корпусными конс­
трукциями
[86].
Полукорпусной акселерометр АС-О802П (рис.
МБП
1
8.24)
содержит
типа М-О80З с присоединенным к нему двухпроводным
кабелем
2,
Защитный тонкостенный металлический кожух З гер­
метично укреплен на фланце основания МБП.
Рис.
8.24. Конструкция блочного
полукорпусного акселерометра
АС-О802П:
3-
1-
:мЕП;
2-
:кабель;
защитный кожух
ПрименеlПlе защитного кожуха позволяет исключить заливку
полостей в блоке и нанесеlПlе экранирующего покрытия, что спо­
собствует упрощенlПQ технологии изготовлеЮIЯ, Одновременно
улучшается защищешюсть от акустических полей и внешних ме­
ХaIшческих воздействий. ЗакреплеlПlе на кожухе соедmlИтельно~
го :кабеля СlПlжает помехи, вызываемые его вибрацией, Однако
могут иметь место искажеlПlЯ АЧХ, обусловлеIПIые непосред­
ствешюй механической связью МБП с кожухом, если частоты
его резонансных колебаний лежат в пределах рабочего диапазона
частот. В таких случаях целесообразно выполнять кожух из лег~
223
Ю1х ШIЗкодобротных материалов и использовать вместо IL"'IОСКИХ
поверхностей сферические или конические.
В по.лухорпусном акселерометре АВ-О703П (рис.
8.25)
2,
тина М-О704 приклеен к металлическому основанию
:мБП
]
выпол­
ненному из титанового сплава с резьбовым выступом для крепле­
ния на объекте и опрессован стеклопластическим материалом
с МСТaлJПfчес:ким экранирующим покрытием
Рис.
8.25.
3
4.
Конструкцпя блочного
"OJIYROрпусного акселерометра
АВ-О703П:
3-
1-
:мЕП;
2-
основаЮIе;
стеклопластик;
4-
металшrчес:кое
покрытие;
5-
кабель
Соедшштельный кабель
5 вмонтирован в
основание акселеро­
метра. В другой МОДИфИlffiЦии акселерометра, с целью снижения
КВЛП, межу внешней поверхностью МБП и стеклоплаСТIIКОВЫМ
колпачком имеется воздушный зазор
224
[185].
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
Таблица
8.9
Основиые техиические характеристики рассмотреиных
блочиых полукорпусных акселерометров
Тип акселерометра
Характеристика
Коэффициеm преобразования:
по заряду, пКл·м 1·c2
по напряжеиmo, MB·M·1·c2
Частота установочного резонанса, кГц
оюm,%
Электрическая емкость, нФ
АС-0802П
АВ-0703П
0,6
0,7
0,15
0,5
50
65
5-7
4-;;
1,1
0,38
1,5
2,0
3,5
12,0
Предельная температура, ос
160
200
Масса без :кабеля, г
8,0
6,0
Предельиое ускорение,
вибрационное
1()4 м·с-2 :
ударное
8.3.4.
Корпусные Qкселеро.меmры
в корпусных конструкциях акселерометров МЕП расположен
внутри
жесткого
герметичного
корпуса,
имеющего
металличе­
ские основание и крьшrкy. благодаря чему обеспечиваются луч­
шая защищеюlOСТЬ от внешних воздействий, универсальность
и надежность креплеlПlЯ, Наличие корпуса неизбежно приводит
к возрастанmo массогабаритных харак.геристи:к и сниженmo час­
ТОТЫ установочного резонанса по сравнеlПlЮ с бескорпусн:ы:ми
вариантами исполнеlПlЯ,
Рассмотрим вначале два компресиионных блочных корпусных
акселерометра (табл,
8.1 О).
225
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Корпусной акселерометр АС-О703 (рис,
8.26)
содержит МБП
типа М-О705, поджатый дюрamoмmшевой крышкой
ffilю
3 из титанового
сплава через прокладку
4,
1
к основа­
2
обеспечивающую
равномерное распределеIШе усилия поджатия фланца и компен­
сацию разности температурных расширений материалов блока
и корпуса.
Рис.
8.26. Конструкция блочного
корпусного акселерометра
АС-О703:
3-
1-
МЕП;
кръппка;
4-
2-
основание;
npокладка
КреплеIШе акселерометра производится резьбовой шпилькой
(если рабочая ось должна быть перпеНДИh."),лярна монтажной
поверхности объекта) или в поперечном направлеffilИ СКВОЗн::ы1vI
ВlПlтом через специальное отверстие В основании.
Корпусной акселерометр ДЛЯ измерения высоких
вибрациошюго и ударного ускорений АВУ-1403
ВЫПOJПlен на основе :м:БП
ральным ВlПlтом
2
1
на основании
зованием керамического
металлическое ПОh.""рытие.
уровней
(рис,
8.27)
3 из титанового сплава с исполь­
изолятора 4, имеющего токосъемное
Для облегчеlПlЯ конструкции h.""рышка 5
ВЫПOJПlена из алЮМИЮlевого сплава,
226
[187]
типа М-1404, закреплешюго цент­
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
__ 5
'!!.I
Рис.
8.27. Конструкция блочного
корпусного акселерометра
---]
АВУ-1403: 1-:rvtБП;2-винт;
3-
основание;
4-
изолятор;
5 -крышка
Таблица
8.10
Основные техническне хараh."'ТеРИCnIКН рассмотренных
компрессионных блочных корпусных акселерометров
Хараь..-rеРИСППffi
ТJШ акселерометра
АС-0703
АВУ-1403
0,2
0,5
0,2
0,13
35
4,0-7,0
55
4-7
0,37
1,5
4,0
15,0
3,5
12,0
Предельная температура, ос
250
250
Масса без :кабеля, г
17,0
8,5
Коэффициент npеобразования:
по заряду, пКл·м· 1 ·с 2
по напряженmo, MB·M-1·c2
Частота установочного резонанса, кГц
ОКПП,%
Электрическая е:м::кость, нФ
Предельное ускорение, lQ4 м·с-2 :
вибрационное
ударное
Примерами корпусной конструкции с деформацией изгиба
является акселерометры АН-120З и ПВП-О2 (табл.
8,11),
В аксе-
227
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
лерометре АН-120З
к основанmo
2
[185]
(рис.
8.28)
МБП
1 типа М-1202 поджат
3 через изо­
корпуса из титанового сплава винтом
лятор 4 с токосъемником для подключения соединительного кабе­
ля. Дюрamoминиевая крьшrкa
5
соединена с основаIШем кольце­
вой защелкой с клеевым уплотнением,
_._1
Рис.
8.28. Конструкция блочного корпусного
акселерометра АН-1203:
14-
NIБП;
2-
основание;
3 - винт;
5 - крышка
изолятор с токосъемником;
Акселерометр ПВП-О2 (рис,
8.29) на основе МБП типа М-1204
предназначен для использования в качестве рабочего эталона при
кa.JШбровке акселерометров и виброизмерительных трактов с ис­
пользованием вибростендов
МБП
1
[191],
поджат через керm.rnчесКИЙ изолятор
шестигранного корпуса
3
2
к основанию
с внешним резьбовым отверстием для
крепления испытуемого акселерометра, Жесткая крышка
4
имеет
резьбовой выступ, предназначенный для креШIения зталонного
акселерометра на столе вибростенда, Вывод сиrnaла осуществля­
ется через коаксиальный разъем
5,
Элементы корпуса акселеро­
метра выполнены из титанового сплава,
228
Рис.
8.29. Конструкция блочного
корпусного акселерометра ПВП-02:
1-
МБП;
2 - изолятор; 3 - основание;
4 - кръшr:кa; 5 - разъем
Соосное расположение МБП и испытуемого акселерометра на
одном и том же элементе конструкции (основании) обеспечивает
минимально возможное раССТОЯIПIе между ними. что способству­
ет повьппенШQ точности калибровки. Проведенное искусствен­
ное старение Iv1БП и акселерометра в сборе. путем термоцикли­
рования
с
коротко
замкнутыми
выводю.rn
при
одновремеШIQМ
воздействии вибрации, повьппает стабильность его метрологи­
ческих характеристик.
В блочных корпусных акселерометрах, предназначенных для
эксплуатации в условиях воздействия высоких температур и про­
mПffiЮЩИ:Х излучений. элементы корпуса выполнены из нержа­
веющей стали. для вывода сигнала применен работоспособный
до
800
"С термопарный кабель типа КТМС с магнезиальной изо­
ляцией, оболочкой из нержавеющей стали и парой ПРОВОДЮlков
хромель-алюмель, Кабель соединен с основаЮlем посредством
пайки высокотемпературным припоем в Шlертной среде
[118].
229
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
Таблица
8.11
Основные технические характеристики рассмотренных
блочных корпусных акселерометров с деформацией изrnба
Тип акселерометра
Характеристика
КОЭффJЩиенr преобразованИJI:
по заряду, пКл·м- 1 ·с 2
по напряженmo, MB·M·1·c2
Частота установочного резонанса, кГц
ОКIШ,%
Электрическая емкость, ПФ
Предельное ускорение,
АН-1203
ПВП-02
3,8
3,0
14
1,0-1,5
1,3
10,0
4,5
12
0,6-1,0
1,9
1()4 м·с-2 ;
вибрационное
1,2
0,5
200
14,0
100
75,0
ударное
Предельная температура, ос
Масса без кабеля, г
Акселерометр АТН·1203 (рис,
температурных (табл.
8,12),
8.30)
относится к типу высоко­
Он содержит МБП
1
ТlПIа М·1202Т
из п:км ТВ·2, размещенный на керамической монтажной плате
2
с вмонтированным проволочным выводом, Поджатие к OCHOBa~
ffilЮ
3 осуществляется гайкой 4, наВJПlченной на резьбовой хвос·
5, выполненной вместе с основанием, Материал и
товик шпильки
высота гайки обеспечивают стабильность усилия поджатия МБП
за счет скомпенсированной разности температурных распrnpений
элементов конструкции, Кабель
6
типа КТМС впаян в отверстие
бокового выступа основания. ПРОВОДlПlки кабеля и вывода мон·
тажной платы сварены, образуя спай термопары 8, и используются
для передачи сигнала и измерения температуры датчика, Крьппка
8 после
сборки и предварительных испытаний акселерометра со·
едШlЯется с основанием :контактной конденсаторной сваркой.
230
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
_.. 8
Рис.
8.30. Конструкция блочного :корпусного
акселерометра АПI-1203:
1-
МБП;
2 - монтажная ШIIJra; 3 - основание;
4 - гайка; 5 - IШПШька; 6 - кабель;
7 - спай термопары; 8 - кръшrкa
Высокоте:мпературный акселерометр АВТ -009 (рис,
8.31) содер­
жит монокерамический элекгромеxaJПfЧеский преобразователь
1
из пкм ТНВ-l, состоящий из :многослойного пьезоэлемента с пас­
сивн:ьn.m наклaдкm.m на торцах, Накладка, обращенная в сторону
основamIЯ
Рис.
2, имеет вмонтированные проволочные выводы, сварен-
8.31. Конструкция блочного :корпусного акселерометра
1 - монокерамический преобразователь;
основание; 3 - кабель; 4 - шайба; 5 - npужина;
6 - гайка; 7 - винт; 8 - лунка; 9 - кръшrкa
АВТ -009:
2-
231
Пава
8. Акселераvempы с МlJ1щкераМl/чеС/(l/Мl/ u ,)lОJЮЛIUJIНЫМl/ JJЬе3OЭJJeюnрuчexJl.UМU
электромеханuческими npeобразоват~ШI
ные с провоДНИIGlШf кабеля
3. Вторая
накладка с увеличенной вы­
сотой является инерционным элементом, Акселерометр выполнен
с симметричным :изолированным от корпуса выходом,
Система упругого поджатия преобразователя содержит опор­
ную прокладку
винт
7,
4,
тарельчатую пружину
5,
гайку
6
и сквозной
сваренный с основанием в зоне контакта головки. Все
элементы
системы
упругого
поджатия
выполнены
:из
68НХВКТЮ-ВН-О,5 с рабочей температурой не менее
сплава
600
ос
и подвергнуты специальному режш.I)' термообработки, Оболочка
кабеля ТlШа КТМС для мехаIШЧескоro креплеЮIЯ и герметичности
ввода залита ВЫСОКOIeмпературн:ьn.I припоем в лунке
9
8,
Крышка
соединена с основаЮlем контактной конденсаторной сваркой.
Акселерометр имеет симметричный :изолированный выход.
Таблица
8.12
Основные технические характеристики рассмотренных
высокотемпературных акселерометров
Тип акселерометра
Характеристика
АТН-1203
АВТ-009
Коэффициент преобразования, пI(л.м- 1 ·с 2
0,3
0,2
Частота установочного резонанса, кГц,
14
ОКIШ,%
2-4
30
5-10
Электрическая eI\.fКOCTh, нФ
0,40
0,55
Предельное вибрационное ускореIШе,
Н)4м·с-2
0,6
1,2
Предельная температура, ос
450
650
33
36
Масса без :кабеля, г
ПрименеЮlе унифицированных корпусов и :м:БП, допуска­
ющих взаимные :комбинации, позволяет выпускать расширенный
ассортимент блочных :корпусных акселерометров при :минималь­
ном количестве :комплектующих.
232
8.3.
АкЕелqю.}jempы на OC/Iове ,}jОНшшmных u J,uJf/ОКЕрамuЧECК1.lX
блоков-npeoбразоваmелеи
КВАП и квда, при установке JvlБП в жестком корпусе, умень­
шаются в среднем на два порядка, а КВ:МП по крайней мере на
порядок ниже, чем у акселерометров с преобразователями состав­
ной конструкции, содержащих металлические элементы,
При расчете основных технических характеристик JvlБП и ак­
селерометров на их основе могут использоваться аналитические
методы, доработанные применительно к специфике монолитных
конструкций
[86, 192].
В настоящее время для анализа и расчета
пьезоэлектрических устройств широкое распространение полу­
чают прямые ч:ислеlПlые методы, среди которых лидирующее по­
ложение занимает метод конечных элементов
программного пакета
ANSYS
[193],
Применение
для исследования конечно-элемен­
тных математических моделей пьезоэлеIcrpических преобразова­
телей монолитной и составной конструкций, а также датчиков,
включая
акселерометры,
открывает
дальнейшего совершенствоваffiIЯ
широкие
перспеIcrИВЫ
их
[194-196],
233
ГЛАВА
9
ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК АКСЕЛЕРОМЕТРОВ
ИзмереlПlе характеристик акселерометров ПРОВОДИТСЯ в про­
цессе их изготовления, при приемо-сдаточных и периодических
испытаниях, первичной и периодической поверках, В случаях
проведеffiIЯ ответственных измерений, особенно связанных с экс­
тремальными условиями эксшryатации акселерометров, рекомен­
дуется провести их калибровку до и после завершеffiIЯ работы,
ЭТО позволит убедиться в достоверности полученных результатов
или выявить возможные отказы,
Основная цель калибровки
-
обеспечение прослеживаемой
СВЯЗИ результатов измерений, осуществляемых конкретным аксе­
лерометром, с абсолютными эталонами еДШIIЩ соответсТВУЮЩИХ
физических величин,
Главной задачей калибровки является определеЮlе точного зна­
чения коэффициента преобразоваIШЯ, с погрешностью, не превы­
шающей точностные требоваmIЯ согласно назначенШQ акселеро­
метра или задачи измереIШЯ. При этом целесообразно проводить
исследование АЧХ и определять ее соответствие паспортным
данным.
При проведении испытаний акселерометра на соответствие
требоваlПlЯМ технической документации измеряются все огово­
ренные в ней теХffilческие характеристики. в том числе: частоты
резонансов, О:КПП, электрическая емкость, ЛlПlейность АХ, ха­
рактеристики ВШlЯlПlй внешних воздействий и другие.
9.1. Измерение
коэффициента преобразования
При калибровке акселерометров используются следующие ме­
тоды измерения КОЭффlЩиента преобразования:
234
абсолютные методы, предполагающие определеlПlе коэффи-
9.1.
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
циента преобразования с использованием основных и производ­
ных еДШIIЩ физических ВeJШЧIПI; к Юlм относятся метод с ис­
пользованием лазерной интерферометрии
имности
Земли
-
[199]
[200];
[197, 198],
метод вза­
и метод с ИСПОЛЬЗОRaЮlем гравитационного ПОЛЯ
методы непосредственного сличения, к которым относится
метод сравнения с известным коэффициентом преобразования
эталОlПlOго акселерометра, мехamrчески соединеlПlОГО с испыту­
емым;
-
методы, ОСНОВaIПlые на применеЮlИ калибраторов, в част­
ности вибраторов с точно определенными параметрами колеба­
Юlй вибростола
-
косвенные
[62, 201];
методы,
основанные
на анализе
электрических
характеристик акселерометра (импеданса, электрической емкос­
ти)
[202]
или отклика на механическое или электрическое удар­
ное возбуждеЮlе; к таким методам можно отнести использоваЮlе
электромеХaJПIческого калибратора, встроенного в испытуемый
акселерометр
[203],
из названных методов кмибровки наиболее широкое распро­
странение получили абсолютный метод с применеffilем лазерного
IПIтерферометра и метод непосредственного сличения. Для про­
ведения калибровки этими методами необходимо применеЮlе
поверочных или :калибровочных вибростендов. Калибраторы ис­
пользуются в основном для проведения оперативной кмибровки
виброизмерительных систем в местах их непосредствеlПlОЙ экс­
плуатации,
Дрymе абсолютные методы измерения коэффициента преоб­
разования имеют очень огрamrчеШlOе применение, При кмиб­
ровке методом взаимности, несмотря на то, что к используемой
аппаратуре не предъявляется особых треБОВaIШЙ, процесс явля­
ется довольно сложным и не всегда дает точные и достоверные
результаты. Метод с использованием гравитациОIПlОГО поля, ос­
нованный на повороте испытуемого акселерометра в вертикаль­
ной шюскости, пригоден только в области самых низких частот
235
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
и применяется преимуществеюю для калибровки акселеромет­
ров, измеряющих статические ускореIШЯ,
Косвенные методы, несмотря на перспе:rcrивную возможность
бездемонтажной калибровки и проверки акселерометров или из­
мерительных трактов непосредственно на контролируемом объ­
екте
практически не получили применеIШЯ, вероятно
[201,204],
из-за недостаточной завершенности и необходимости дополни­
тельного усложнеmrя виброизмерительной аппаратуры,
9.1.1. Вибростенды
для uзмерения коэффициента
nреобразования
Вибростенд
-
это система, предназначеЮIaЯ для создаIШЯ кон­
тролируемых вибрационных колебаний в заданных диапазонах
частот и амплитуд, Вибростенд содержит следующий МШlИмаль­
ный набор функциональных устройств:
-
вибратор (вибровозбудитель), преобразующий подаваемый
на него эле:rcrpический сигнал переменного тока в механические
колебания;
-
систему питаIШЯ вибратора, состоящую из генератора сипш­
лов и усrшителя мощности;
-
систему измереIШЯ уровня виброколебаmIЙ (перемещения,
скорости или ускорения).
Дополнительно, вибростенд может содержать систе:му под­
держания заданного уровня колебаний в рабочем диапазоне час­
тот (компрессор) и некоторые другие устройства,
При калибровке акселерометров используются преимущест­
венно вибраторы с эле:rcrpОДШIaмическим возбуждеmIем (эле:rcr­
РОДШIaмические вибраторы). Основн:ьn.ш: частями эле:rcrpОДШIa­
мического вибратора являются магнитная система, подвижная
система и система упругого подвеса
На рис,
9.1
[205],
по:казаны примеры наиболее распространенных
конструктивных схем элеКТРОДШIaмических вибраторов.
236
9.1.
Рис.
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
9.1. Схемы электродинамических вибраторов
(6) подвесами
с одностороНIПIМ (а) и двухсторонним
Магнитная система состоит из постоянного магнита
него
2, 9, 10
и внутреlПlего
3, 11
1, 8,
внеш­
магнитопроводов, между полю­
сами которых образован кольцевой рабочий зазор. В вибраторах
большой мощности вместо ПОСТОЯlПlого магнита использует­
ся катушка возбуждения магнитного поля, расположенная вок­
руг внутреlПlего магнитопровода. Подвижная система включает
в себя силовую катушку 4, расположенную в рабочем зазоре, Кар­
кас
5
катушки жестко связан со столом
6,
предназначеlПlЫМ для
крепления испытуемого изделия. для работы при повьппенных
режимах мощности для охлаждеIПIЯ силовой и возбуждающей ка­
тушек используется воздуппюе охлаждеlШе.
Система упругого подвеса образована упругими элементами
12,
7,
необходимыми для возвращения подвижной системы в поло­
жение равновесия и ее центровки, В качестве упругих элементов
обычно используются плоские пружины или мембраны.
Основными особенносттш вибратора с двухсторонним под­
весом (рис,
9,1 б)
являются расположенные по обе стороны маг­
Юlтной системы упругие элементы, что увеличивает поперечную
жесткость подвеса, а также наличие штока
13, позволяющего кон­
тролировать виброколебаmIЯ с противоположной от стола сторо-
237
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
ны. Однако из-за расстояния между рабочей поверХНОСТЬЮ стола
и свободным торцом штока, предельная частота, при которой вы­
полняется строгое соответствие параметров колебаний, как пра­
вило, не превышает
1 кГц.
В основе элеIcrpодинамического способа возбуждения колеба­
IПIЙ лежит явление возникновения переменной электродинами­
ческой силы при взаимодействии проводника силовой катушки,
по которому протекает переменный электрический ток, с посто­
ЯIПIым мапштным полем в рабочем зазоре.
При расположении провоДIШка перпендикулярно направлеlШЮ
магlПlТНЫХ силовых линий электродинамическая сила
F(t)~BlI(t),
где В
-
(9.1)
магнитная индукция в рабочем зазоре;
1- общая длина проводника силовой катушки;
1-
ток в ПРОВОДlПIке.
ИзменеlПlе тока и его частоты позволяет воспроизводить виб­
роколебания с различной амшIИТУДОЙ и частотой.
В зависимости от требуемого частотного и ДIПIамического диа­
пазонов, конструкции вибраторов могут иметь существенные от­
личия. Например, для работы в области Шlфранизких и низких час­
тот, когда требуются большие виброперемещеlПiЯ, используются
конструкции с удлиненны::ми магlПlТНЫМ зазором ИJШ силовой :ка­
ryшкoй, Благодаря этому в магlПlТНом поле находится неизменное
число витков во всем диапазоне перемещения:катушки
[206].
3начительНОА-ry улучшеlПlЮ эксплуатационных и метрологи­
ческих характеристик электродинамических вибраторов (УВе­
личеlПlе возможного перемещеЮIЯ подвижной части и нагрузки
в радиальном направлешш, исключение ВЫСППlх гармоник коле­
баний и др.) способствует использование аэростатического под­
веса вместо упругого механического
[207],
К основным техническим характеристикам вибраторов отно­
сятся
238
[208]:
9.1.
-
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
выталкивающая сила, определяющая максимальную ампли­
туду ускорения в зависимости от массы испытуемого изделия;
-
грузоподъемность, то есть максимально допустимый вес ис­
пытуемого издemIЯ;
-
максимальные амплитуды виброперемещеIПIЯ (в lПiЖНем
диапазоне частот) и виброускореIПIЯ (во всем рабочем диапазоне
частот);
-
рабочий диапазон частот инеравномерность АЧХ;
неравномерность распределения ЗМПШIтуды колебаЮlЙ по
столу;
-
относительные поперечные колебания стола;
искажеЮlе формы колебаний,
ПослеДlПlе три параметра могут оказывать заметное влияние
на погрешность калибровки акселерометра,
Естественно, что названные характеристики зависят не только
от конструкции вибратора, но и от используемых материалов. ка­
чества изroтовлеIПIЯ деталей, сборки и регулировки,
Рабочий диапазон частот электродmшмического вибратора оп­
ределяется двумя его резонансными частотами, Нижний предел
ограничен резонансной частотой колебаний в продольном на­
правлении всей подвижной системы на упругом подвесе, которая
зависит от ее массы с нагрузкой и жесткости подвеса. На более
Юlзких частотах амплитуда колебаний резко снижается, и воз­
ЮlкaIOТ искажения формы колебаний, обусловленные упругими
свойствами подвеса, ВерхЮlЙ предел Юlже собственной часто­
ты продольных колебаний подвижной системы, зависящей от ее
размеров, конструкции и свойств материалов. Максимальная ра­
бочая частота электродmшмического вибратора может достигать
50 кГц
(модель
4290 фирмы
«Брюль и Къер»).
При работе вибратора на отдельных частотах возможно воз­
Юlкновение резонансных колебаний упругих элементов подвеса
и подвижной системы в поперечных направлеIШЯX. Именно 01Пl
приводят К заметному возрастаlПlЮ относительного коэффициен­
та поперечного движения стола, неравномерности распределения
239
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
колебаний по его рабочей поверхности и КОЭффlЩиента гармо­
IШК.
Колебания, воспроизводимые вибратором, измеряют различ­
ными способами. К их числу относятся оптические, интерферо­
метрические и с использованием датчиков вибрации.
В некоторых случаях, кроме электродинамических вибрато­
ров, при испытании акселерометров используются специальные
резонансные и пrnpокополосные вибраторы с пьезоэлектричес­
ким возбуждением
[209],
В зависимости от условий эксплуатации, вибростенды разде­
ляются
на
стационарные,
предназначенные
для
использования
в лабораторных условиях, и переносные (портативные), которые
можно применять для калибровки аппаратуры в местах эксплуа­
тации с частичным демонтажем акселерометра [204], Переносные
вибростенды с aвTOHo~тым питанием необходимы при работе во
взрывоопасных помещениях
[21 О],
Как правило, переносные виб­
ростенды содержат вмонтированный в стол вибратора эталОlПlый
акселерометр,
Вибростенды с компьютерным управлением, регистрацией
и обработкой результатов измереlПlЯ позволяют существенно со­
кратить время проведеlПlЯ испытаний и документирования по­
лучеlПlЫХ результатов
[211],
Такие измерительные системы уже
выпускаются ведущи::~ш производителями,
Калибраторы,
применяемые для проверки
акселерометров
и измерительных трактов, представляют собой мшшатюрный
вибростенд, в корпусе которого смонтированы электродинами­
ческий вибратор, батарея и система питания вибратора с авто­
матическим поддержаШlем фиксированных значений ю.mлитyды
и частоты колебаний, Характерным примером является калибра­
тор модe.rnI
4294 фирмы <<Брюль и Къер)), воспроизводящий коле­
159,2 Гц (1000 paд·c- 1 ) ± 1 % с виброускорением
соответствующим виброскорости 1О мм.с- 1 ± 4 %
и виброперемещенlПO 10 мкм ± 5 %, Максимальная грузоподъем­
ность составляет 70 г.
бания на частоте
1О
240
м,с-2
± 3 %,
9.1.
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
в последнее время ведутся работы по совершенствованию ка­
либраторов, направлеIПIые на возможность воспроизведения ко­
лебаний с различными частотами и амплитудами
9.1.2.
[129, 212],
Из.меренuе К1Jэффuцuенmа nреобразованuя абсолюmныtt
.методо.,и с npu.мeHeHиeм лазерного uнmерферо.,чеmра
в основе метода лежит измерение лазерным интерферометром
амплитуды колебаний стола или установлеIПIОГО на нем испы­
туемого акселерометра, одновременно с измерением выходного
СIП'Нала этого акселерометра. Соответствующий КОЭффlЩиент
преобразования акселерометра определяется как отношение его
выходного сигнала к виброперемещению (виброскорости или
виброускореШlЮ).
Источником виброколебаний служит электродинамический
вибратор, Для измерения виброперемещеIШЯ обычно применя­
ется ШIТерферометр М8Йкельсона в комплекте с фoroдетектором
для детектирования интерфереIЩИОННОЙ картины и калиброван­
ный по длине волны одночастотный стабилизированный лазер на
гemIй-неоновой смеси с постоянной ДJПIной волны
0,6328
мкм
и счетчиком импульсов,
Для измереlllIЯ амплитуды виброперемещения используют­
ся два метода
[213],
Метод
1
(метод счета интерференционных
полос) применяется в диапазоне частот
Метод
(рис.
2 (метод
9.3).
минимумов)
-
20-800
Гц (рис.
в диапазоне частот
9.2),
800-5000 Гц
Для исключения помех от вибрации при проведеmrи изме­
рений, вибратор и лазерный интерферометр должны быть ус­
тановлены на едином сейсмическом блоке, вывешенном на
пружинах, Масса сейс~rnческого блока должна не менее чем
в 2000 раз превышать суммарную массу подвижной части вибра­
тора и нагрузки, Резонансная частота блока с пружинами в вер­
тикальном и горизонтальном направлениях должна находиться
в пределах
1-2 Гц,
241
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
Рис.
9.2. Структурная
схема измерительной
систе],[bl для метода
счета полос (метод
1)
1 - вибратор; 2 - усишrreль мощности; 3 - генератор частоты и инди­
катор; 4 - стол вибратора; 5 - калибруемый акселерометр; 6 - ШIOс:кое
зеркало; 7 - :интерферометр; 8 - лазер; 9 - фотодетекroр; 10 - счетчик
m.шульсов;
11 -
усиmrrель напряжения;
12 -
вольтметр;
13 -
измери­
тель нешшейных искажений
Рис.
9.3.
Структурная
схема измерительной
системы для метода
минимумов (метод
6-
ШIOс:кое зер­
кало; 7 - :интерферометр; 8 - лазер; 9 - фотодетекroр;
вой фильтр, настроенный на частоту вибратора; 11, 14
1О - полосо­
- вольтметр;
4-
стол вибратора;
5-
к<urnбруем::ый акселерометр;
2)
12 -
часТO"ПIый анaJШЗатор (вместо
ния;
15 -
242
10 и 11); 13 -
измеритель нелинейных искажений
усилитель напряже­
9.1.
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
При соблюдеmш необходимых требований
[213]
пределы до­
пускаемой погрешности калибровки акселерометра совместно
с УСИШIтелем напряжения составляют; ±О,5
%
на опорной часто­
те (160 или 80 Гц), опорной амплитуде виброускорения (100 или
1О M·C-1) И опорной настройке усилителя; ±1 % в диапазоне частот
от
20 до 1000 Гц; ±2 %
в диапазоне частот от
1000 до 5000
Гц.
В некоторых случаях, если используется вибратор со штоком
(см, рис.
9.16),
при проведеЮlИ калибровки рабочих средств из­
мерения на ffilЗКИХ частотах, отражающее зеркало устанавливают
на его торце. Это позволяет иметь стационарное :крепление зерка­
ла и свободную поверхность стола. ВО всех случаях, если это воз­
можно, следует избегать размещеЮIЯ зеркала на столе отдельно
от акселерометра, Неравномерность распределения колебаний по
поверхности стола и отклонения его движения от поступательно­
го вызывают ДОПОЛffilТельную погрешность измереIПIЯ.
Абсолютный метод калибровки с лазерным интерферометром,
как правило, используется при первичной калибровке акселеро­
метров. Реализация данного метода достаточно трудоемка, требу­
ет применения сложного оборудования и использоваЮIЯ высоко­
квалифицироваIПIЫХ специалистов, что делает его малопригод­
ным для повсед;невной или текущей проверки акселерометров,
9.1.3. Из.мерение коэффициента nреобраэованuл методом
неnосредственного сличения
Вибрационная калибровка методом сличеIПIЯ основана на
сравнении
сигналов
мехаffilчески
соединеlПlЫХ
испытуемого
и эталОlПlого акселерометров, установлеIПIЫХ на столе вибратора
[214]
(рис.
9.4).
ИСКОМЫЙ КОЭффlЩиент преобразования рассчитывают по фор-
-
для акселерометра в КОМIШек.ге с УСИШIтелем;
K 2 = Kj !!..L,
Х,
(9.2)
243
Пава
где
K1
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
коэффициент преобразоваmIЯ калибруемого акселеро­
-
метра с усилителем;
К!
коэффициент преобразования эталонного акселерометра
-
с усилителем;
Х!
-
выходной сигнал эталонного акселерометра с УСИШlтелем;
X1
-
выходной сигнал калибруемого акселерометра с УСIШИТе­
лем;
- для акселерометра без усилителя:
(9.3)
где к;
- коэффициент преобразования калибруемого акселеро­
метра без усилителя;
ky, 2
-
коэффициент передачи усилителя :калибруемого акселе­
рометра.
Рис.
9.4. Структурная схема нroричной юurnбровки
1 - вибратор;
акселерометра методом сличения:
2-
усилитель мощности;
и индикатор;
7, 1О -
генератор частоты
9,11
5-
эталонный
:калибруемый акселерометр;
6-
усиmrreль;
искажений;
8-
измеритель нешшейных
-вольтметр;
(вместо
244
3-
стол вибратора;
4-
акселерометр;
12 -компаратор
9 и 11)
9.1.
Jhllepeнue /Шэффuцшщmа 1JРеобразо8lШWI
Эта же методика используется для измереlПlЯ коэффициента
преобразования акселерометров в необхо.дт.'IЫХ частотном и ам­
плитудном диапазонах для определения неравномерности АЧХ
и нелинейности АХ соответственно.
При соблюдении необходимых требований
[214],
пределы до­
пускаемой погрешности калибровки акселерометра совместно
с усилителем напряжения составляют;
от
20
до
1000
Гц; ±З
в диапазоне частот
±2 %
в диапазоне частот
% в диапазоне частот 20-2000 Гц; ±5 %
20-5000 Гц; ±10 % в диапазоне частот
1-10000 Гц.
При проведении калибровки рабочих средств измерения на
ffilЗКИХ частотах, JПIQГДа" при использовании вибратора со што­
ком (см, рис,
9.16), эталонный акселерометр устанавливают на его
торце. Это позволяет поверхность стола вибратора использовать
для креплеlПlЯ испытуемых акселерометров, еCШI их соеДl-шение
с эталонным датчиком затруднительно или невозможно, ПО при­
чинам, указанным вьппе, не следует отдельно размещать на столе
испытуемый и эталонный акселерометры.
Эталонные акселерометры должны обладать высокой стабиль­
ностью метрологических характеристик, С этой целью их пьезо­
элементы
изготавливают
из
монокристаллического
высокоста­
бильного nьезо:материала, преимущественно кварца, для одновре­
менного креплеlПlЯ на вибростенде и механического соединеlПlЯ
с калибруемым акселерометром эталонные акселерометры часто
выполняют с двумя установочными поверхностями, расположен­
ными на противоположных торцах корпуса (рис.
9.5).
С целью уменьшения погрешности на высоких частотах, креп­
леЮlе калибруемого акселерометра должно производиться на
установочную поверхность эталонного акселерометра. с проти­
воположной стороны которой расположен его электромехаШlче­
ский преобразователь. При этом снижается ВЛИЯЮlе эффекта «от­
носительного движения», обусловленного упругостью элементов
конструкций, расположенных между преобразователя:ми двух ак­
селерометров
[215],
245
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
В :качестве примеров можно назвать следующие модели эта­
лонных пьезоэлектрических акселерометров:
и Къер}},
2270
(США), АР10
8305 фирмы «Брюлъ
фирмы «Ендевко}}, 301Аll и 301А12 фирмы «РеВ}}
000 «ГлобалТест»
(Россия)
Рис.
[129].
9.5. Конструктивная схема
эталонного пьезоэлектрического
акселерометра типа
3.
8305:
А - установочная поверхность
для креШIения калибруемого
акселерометра; Б
-
установочная
поверхность ДJIЯ креШIения
---··2
на вибростоле;
2-
1-
:корпус;
электромеханический
преобразователь;
3-
:кабельный разъем
9.2. Измерение отиосительного коэффициента
поперечного преобразования
При определении ОКПП необходимо воздействие ускорения
на акселерометр только в поперечном направлеffilИ (допустимое
движеЮlе вдоль рабочей оси акселерометра не более
0,1 от зна­
чения измеряемого ОКПП). Такие требования реально не могут
быть обеспечены при использованиях обычных вибраторов, кото­
рые применяются для измерения КОЭффlЩиента преобразования
и имеют относительный КОЭффlЩиент поперечных колебаЮlЙ до
5-1 О % и более, В этой связи целесообразно использовать спе­
циальные вибраторы с мехаЮlчес:ким приводом, работающие
в диапазоне низких частот, как правило, до нескольких десятков
Гц (рис.
246
9.6).
9.2.
Из,lIеренuе оmщ>cumелыwго JWЗффuцuенmа nоnеречного nреобразовmщя
Рис.
9.6. Схема вибратора с механическим
1 - каретка; 2 - нryлкa;
приводом:
з
5-
- направляющая; 4 -
вращающий стол;
испьnyеl\.fЫЙ акселерометр (положеIШе
при снятии диаграммы);
6-
шток механического привода
Вибратор содержит каретку
ступающее движеЮlе, втулки
2
1,
совершающую возвратно-по­
из материала с малым треЮlем,
скользящие по неподвижным направляющим З. на каретке уста­
новлен вращающийся стол
Шток
6
4
с ИСIIЫТYемым акселерометром
5.
соединяет каретку с механическим приводом, преобра­
зующим вращение синхронного электродвигателя в поступатель­
ное движеЮlе, близкое к синусоидальному.
Для устранения помех от дополнительных вибраций, сопро­
вождающих работу стенда, испытуемый акселерометр ПОДКJПOча­
ется к усилителю с полосовым фильтром, настроеlПlЫМ на часто­
ту движения каретки.
В начале испытуемый акселерометр устанавливают на кре­
пежном приспособлении так, чтобы направление его рабочей ОСИ
совпадало с направлением движения каретки, и измеряют выход­
ной сигнал усилителя и! при работающем вибраторе. Затем аксе­
лерометр устанавливают непосредственно на вращающемся сто­
ле рабочей осью перпенДИКУЛЯРНО направлеlПlЮ движеЮIЯ И, при
работающем вибраторе вращая столик, измеряют максимальное
247
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
U1. тах'
[216]
значеЮlе выходного напряжеlПlЯ
центах определяют по формуле
к
оп
=
Регистрация напряжения
И2 ,,",,,,
И!
U1
.100
Значение ОКПП в про­
(9.4)
.
при непрерывном или дискрет­
ном вращении стола позволяет определить направление мини­
мальной поперечной чувствительности или получить диаграм­
муокпп.
Несимметричная диаграмма направленности О:КПП и замет­
ное отклонение от нулевого значения в направлеlПlИ :минимума
свидетельствуют о значительных поперечных или сложногармо­
нических колебаЮIЯX подвижной системы вибратора в попереч­
ном направлении. Искажения результатов измереlПlЯ могут вызы­
ваться также резонансными колебаниями кабеля акселерометра
[217,218].
Перспеrcrивным усовершенствованием рассмотренной схемы
измерительного стенда является
использование
каретки с
при­
водом от ДЛИIПIQХОДОВОГО вибратора, :имеющего аэростатиче­
ский подвес, например, как в стенде модели
«Спектр"'} (SPEKТRA, Германия)
CS18 TRANS
фирмы
[160].
9.3. Измеренне резонансных частот
в процессе испытаlПlЯ акселерометра могут измеряться следу­
ющие его резонансные частоты:
частота продольного резонанса в свободном (не закреплен­
-
ном) состояюш;
-
частота установочного резонанса в
продольном
направле­
частота установочного резонанса в
поперечном
направле­
нии;
нии.
Существует несколько способов измерения этих характерис­
тик
248
[62, 216, 218].
9.3. Yhllepeнue реэоШШС1/ЫХ чш:mоm
Первый способ определения частоты продольного резонанса
в свободном или закрепленном состоянии основан на совпаде­
ffiШ фаз напряжения сигнала возбуждения и тока, протекающего
через акселерометр на собствеююй частоте незатухающих коле­
баний, Схема реализации такого метода приведена на рис,
9,7,
Емкость конденсатора Сl по своему значенШQ близка к емкости
испытуемого акселерометра. При резонансной частоте на экра­
не осциллографа должна наблюдаться фигура Лиссажу в виде
окружности,
Рис.
9.7. Схема измерения резонансной частоты
1 - испытуемый акселерометр;
3 - генератор синусоидального
сигнала; 4 - масса
акселерометра:
2-
ОСЦИJШограф;
Для определения установочного резонанса к акселерометру
присоединяют массу, собственная частота которой должна быть
не менее чем в
1,2
раза вьппе частоты установочного резонанса
испытуемого акселерометра. Для испытания малогабаритных ак­
селерометров часто используются массы в виде стального куба со
стороной
2,54 мм
или бруска (ЦИШlНдра) массой
180 г,
Второй способ предназначен для измерения частот продоль­
ного
и
поперечного
установочных резонансов,
Испытуемый
и образцовый акселерометры устанавливают на столе вибростен­
да. Для измерения частоты продольного резонанса рабочая ось
испытуемого
акселерометра должна
совпадать
с
направлением
249
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
движения стола. При измереЮlИ частоты поперечного резонанса
направлеffilе рабочей оси должно быть нормальным к направле­
ffilю :колебаний, для чего может использоваться соответствующий
переходной элемент, Изменяя частоту :колебаний при постояlПЮЙ
ro.mлитyде ускорения, определяют частоту, при которой выход­
ной сигнал испытуемого акселерометра имеет максимальное зна­
чение (первый резонанс), При этом фаза сигнала с испытуемого
акселерометра изменяется на
900
по сравненШQ с фазой сигнала
с эталонного акселерометра.
Для получения достоверных результатов необходимо соблюде­
ffilе следующих требований:
верхний предел рабочих диапазонов частот вибростенда
-
и эталОlПюго акселерометра должны превьппать частоту устано­
вочного резонанса испытуемого акселерометра;
-
масса системы (стол вибратора вместе с переходным устрой­
ством) должны значительно превосходить массу преобразователя
испытуемого акселерометра;
в
- резонансная частота этой систе~IЫ должна быть не менее чем
1,2 раза больше частоты установочного резонанса испытуемого
акселерометра,
Третий способ измерения частот установочных резонансов
в продольном и поперечном направлеlШЯX заключается в исполь­
зовании массы, колебаffiIЯ которой возбуждаются пьезоэле:rcrpи­
ческим преобразователем. В качестве такого преобразователя мо­
жет использоваться стальной куб с присоединенным к одной из
его граней пьезоэлементом, высокочастотным пьезоэлектричес­
ким акселерометром или пьезоэлектрическим преобразователем
mюй конструкции (рис.
9.8),
Масса с пьезоэлектрическим возбуждением должна превосхо­
дить массу преобразователя испытуемого акселерометра не менее
чем в
в
1,2
1О
раз, а ее резонансная частота должна по крайней мере
раза превьппать частоту установочного резонанса испытуе­
мого акселерометра, В зависимости от необходимого направления
возбуждения колебаЮlЙ в испытуемом акселерометре, последЮlЙ
250
9.4.
ОnределенUE кnэффЩjuенmО8 tшШlJjWl
устанавливается на соответствующую грань куба, На пьезоэлек­
трический преобразователь-возбудитель подается изменяющееся
по частоте переменное напряжение и по максимуму сигнала с ис­
пытуемого акселерометра и сдвшу его фазы на
питающего
напряжения
900 относительно
определяют частоту соответствующего
резонанса.
Рис.
9.8. Массы
с возбуждающими
пьезоэлектрическими преобразователями
(разработка НКТБ «Пьезоприбор» )
Четвертый способ основан на ударном возбуждеЮlИ продоль­
ных механических колебamIЙ испытуемого акселерометра и ре­
гистрации выходного сигнала запошшающим осциллографом
или анализатором спектра с верхним пределом рабочих частот
не менее
100 кГц. Частота резонанса определяется по
измеренно­
му периоду колебаний сигнала с акселерометра.
9.4.
9.4.1.
Определение коэффициентов влияиия
Определение КDэффuцuенmа влияния mе..чnераmуры
Для определения :КВТ используется вибрационная установка
с закрепленным на столе вибратора стержнем. Испытуемый аксе-
251
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
лерометр устанавшlВaIOТ на свободный торец стержня и помеща­
ют в термокамеру
[62, 218]
(рис,
9.9),
Рис.
9.9. Схема установки для измерения :КВТ:
1 - вибратор; 2 - стол вибратора; 3 - стержень;
4 - термокамера; 5 - измеритель температуры
втермокамере; 6 - испытуемый акселерометр;
7 - термопара; 8 - эталонный акселерометр;
9 - пrroк вибратора
Стержень должен обладать достаточной для передачи неис­
:кажеlПlЫХ колебаний жесткостью и малой теплопроводностью.
Обычно его выполняют в виде трубы из титанового сплава или
прочной керамики с жестко присоединенны:ми накладка1.Ш для
резьбового соеДlПlения со столом вибратора и испытуемым аксе­
лерометром, для размещения эталонного акселерометра удобно
использовать элеКТРОДИНЮvшческий вибратор со сквозным што­
ком.
Для измерения температуры испытуемого акселерометра ис­
пользуется термопара, присоединеlПl8Я
[(
основаIШЮ испытуемо­
го акселерометра, или измеритель температуры в термокамере.
В процессе работы рекомендуется также контролировать темпера­
туру эталОIПюго акселерометра, Чтобы обеспечить идентичность
параметров колебаний эталОlПlого и испытуемого акселеромет­
ров, измерения следует проводить на фИКСИРОВ81П10Й частоте,
не превьппающей
252
200
Гц.
9.4.
ОnределенUE кnэффЩjuенmО8 tшШlJjWl
Температуру в камере плавно (со скоростью
1 градус в минуту)
изменяют до необходимого значения и поддерживают в течение
времени установления температуры акселерометра, но не менее
20 минут.
При постоянном ускорении измеряют выходной сигнал
и устанавливают следующее значение температуры, После нагре­
ва до максимальной температуры, аналогичным способом прово­
дятся измереlШЯ в процессе плавного охлаждения,
9.4.2.
Определение коэффициента влияния дефор.иацuи
основания
Для определеЮIЯ КВДО используется консольно закреплен­
ная стальная балка с местом крепления испытуемого акселеро­
метра" расположенным вблизи гранщы защемл:еЮIЯ
(рис.
[218, 219]
9.10).
Рис.
9.10. Схема устройства ДJIЯ измерения КВДО:
1 - балка; 2 - испытуемый акселерометр;
3-
основание
Рекомендуемые размеры балки
12,5 х 76 х 1500:мм и дефор­
2,5'10-4
25 мм, Испытуемый акселерометр уста­
на расстоянии 40 мм от граЮlЦЫ защемл:еЮlЯ. Дефор­
мации ее поверхности в месте креплеЮIЯ акселерометра
при радиусе кривизны
навливают
мацию при изгибе балки под действием приложенной к ее концу
силы измеряют тензометричес:кими датчиками или определяют
253
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
по формуле
•
6Fl
е = E IObh 2 '
где F
сила, приложенная к свободному концу балки, Н;
-
Е
(9.5)
-
модуль упругости материала балки, Па;
1 : расстояние от центра крепления акселерометра до точки
приложеЮIЯ сIШЫ, м;
Ьh-
ширина балки, м;
толщина балки, м,
В процессе работы создаются колебания балки и измеряются
значения выходного сигнала акселерометра и деформации, Изме­
реЮIЯ проводятся при повороте акселерометра вокруг его рабо­
чей оси через
30"
или при двух положениях; когда вывод кабеля
направлен вдоль и поперек балки.
Получить непрерывные диаграммы КВДО без переустановки
испытуемого акселерометра позволяет разработанная в НКТБ
«Пьезоприбор)) установка
[220, 221],
в которой используются из­
гибные колебаЮIЯ стального диска, с установленным центре ис­
пытуемым акселерометром (рис,
Рис.
9.11. Схема устройства для полученИJI непрерывной
1 - диск; 2 - испьnyе:м:ый акселерометр;
3 - опорная шейка диска; 4 - основание;
А-А - диаметрauьная узловая ШlНИЯ
диаграм:мы КВДО:
254
9,11),
9.4.
ОnределенUE кnэффЩjuенmО8 tшШlJjWl
Эле:rcrpомагниты системы возбуждеЮIЯ и опорные рOJШКИ (на
рисунке не по:казаны) при вращении относительно оси неподвиж·
ного диска создают изгибную моду колебаЮlЙ с вращающейся
диаметральной узловой шишей, При этом направлеЮlе деформа.
ции также изменяется,
9.4.3.
Определение К1Jэффицuента влияния магнитного поля
Для определения :КВМП акселерометров используется катуш·
ка (или кольца) Гельмгольца, которая состоит из двух соосных
соленоидов, удаленных на раССТОЯIlИе радиуса, и служит для со·
здания открытого однородного МaгIlИтного поля, Напряженность
магнитного поляН (в А·м- 1 ) внутри катушки может быть измерена
индукционным датчиком
[222]
или определена по формуле
H=Ili
l'
[218]
(9.6)
где 1 - ток, протекающий через катушку (А);
N-
число витков;
1- длина катушки, м.
Рекомендуется использовать катушки, создающие магнитное
поле напряжешlOСТЬЮ
не менее чем в
2,5
80
и
400
А·м-l, со средЮlМ диаметром,
раза превышающим максимальный габарит.
ный размер испытуемого акселерометра,
Акселерометр устанавшlВaIOТ в центре катушки на основании
из немагнитного материала массой
4--5 кг в трех взаимно перпен·
дикулярных положениях и регистрируют максимальный выход·
ной сигнал, используемый при определении значеIПIЯ КВМП.
9.4.4.
Определение КО'Jффицuента влияния
акустuчесК1JZО поля
При определеЮlИ КВQП испытуемый акселерометр поме­
щают в акустическую камеру с излучателем звука, обеспеч:и255
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
вающим звуковое давление не менее
130
ДБ
[218],
Для исклю­
чеlПlЯ механических колебаний испытуемого акселерометра,
вызваIПIЫХ воздействием звука или другими источниками, его
закрепляют на массивном жестком рабочем теле, вывешенном
на резиновых амортизаторах, Для контроля уровня вибрации
с противоположной стороны рабочего тела устанавливают до­
полнительный акселерометр, помещенный в акустический эк­
ран. Расстояние от ИСIIЫТYемого акселерометра до излучателя
должно быть не менее
1 м,
Уровень звукового давлеЮIЯ контролируют измерительным
микрофоном, установленным на рабочем теле так, чтобы он на­
ходился на одном уровне рядом с испытуемым акселерометром,
а их рабочие оси были направлены по оси излучателя. Испытания
проводят в заданном диапазоне частот, верхняя грamща которого
не превышает половины значения частоты установочного резо­
нанса испытуемого акселерометра. Некоторые производители,
например фирма ((Брюль и Къер)), проводят испытания при уров­
не звукового давления
154 ДБ
в диапазоне частот от
2
до
100
ГЦ,
полагая, что получаемые результаты можно считать действитель­
н:ы::ми до частот в несколько кГц, выше которых длина звуковой
волны становится соизмеримой с физическими размерами испы­
туемого акселерометра
9.4.5.
[62],
Определение коэффициента влияния перепада
температур
При
измереlПlИ
КВПТ
испытуемый
акселерометр
штат­
но крепят к алюмшшевому бруску, масса которого примерно
в
10
раз больше массы акселерометра
[62, 218],
Исключая ме­
ханические колебания акселерометра, брусок примерно в тече­
llИе 1 с погружают В резервуар с водой, температура которой на
20-25 ос вьпnе нормальной. ПО осциллогрю.Thlе измеряют пико­
вое значение выходного сипшла с акселерометра, используемое
для определения КВПТ, При измерениях рекомендуется при:ме-
256
9 ..5. ИCIJыmQНUЯ IШ ударную и 6UБРQЦUDННУЮ nРDЧJШCmЬ
нение фильтра верХЮlХ частот с частотой среза
спада
6 ДБ
3 Гц и
крутизной
на октаву,
9.5. Испытания на ударную и вибрациониую прочность
Испытания на ударную и вибрационную прочность проводятся
с целью определеffiIЯ верхнего предела рабочего диапазона удар­
ных и вибрациOlПlЫХ ускорений, а также предельно допустимых
значеЮlЙ ЭТИХ воздействий,
В
качестве
источников ударных ускорений используются
ударные стенды различных типов, Наиболее распространены
стенды, работа которых основана на соударении твердых тел,
позволяющих получать импульсы ударного ускорения, форма
которых близка к полусинусоидальной
В зависимости
[223J.
от условий соударения тел, длительность и амплитуда ударно­
го импульса может изменяться в широких пределах
[60, 224],
Для испытаЮlЙ акселерометров при высоких уровнях ударного
ускорения используются стенды с волноводом в виде стержня,
в котором формируется плоский фронт ударной волны, Такие
системы
позволяют
воспроизводить
плитудой ускорения до
до
106
ударные
импульсы
с
ам­
м·с- 2 при длительности импульса
50 мкс [160].
Высокие УРОВЮI вибрациOlПlЫХ ускореЮlЙ можно получить на
вибрационных установках с резонансн::ыJ\Ш вибраторами, в том
числе с элеКТРОДШlамическим или пьезоэлектрическим возбуж­
дением (рис,
9.12),
Использование
КOIщентратора
в
стержневых
вибраторах
с пьезоэлектрическим возбуждеЮlем, в зависимости от конс­
труктивных особешюстей и массы испытуемого акселерометра,
позволяет повысить уровень виброускореlПlЯ до
10--15
раз, При
измерении ВЫСОКИХ уровней ускорений, для предотвращения
разрушеlПlЯ, эталонный акселерометр крепится к торцу тыльной
накладки, для определения ускорения на рабочем торце стержня
или
КОlЩентратора используются
соответствующие
массам
на-
257
Пава
9.
И:нreреmш харaxmepuсm1Л( llXCeJlepavempoв
грузки значения отношений ускорений на торцах, определяемые
при калибровке вибратора,
Рис.
9.12, Схемы резонансных вибраторов:
а - балочный
с электродинамическим возбуждением; б - стержневой
пьезоэлектрический; в
-
пьезоэлектрический
с КOHцeнrpaтopOM;
2-
1 - испьrryемый акселерометр;
3 - эталонный акселерометр;
4 - стол электродинамического вибратора;
5 - стержень; 6 - пакет пьезоэлеменroв;
резонансная балка;
7-
тьшьная накладка
Примером устройства для испытания акселерометров на воз­
действие виброускорений высоких уровней может служить уста­
новка РВУ -009
[225]
(разработка Н:КТБ (Пьезоприбор}}), содер­
жащая пьезоэлектрический резонансный вибратор с концентра­
тором особой формы (рис.
Рис.
9,13).
9.13. IIьезоэлектрический резонансный вибрlПOР
с кoнцeнrpaТOPOM для установки РВУ-ОО9
258
9 ..5. ИCIJыmQНUЯ IШ ударную и 6UБРQЦUDННУЮ nРDЧJШCmЬ
Установка воспроизводит ускорение с амплитудным значением
до
1,5'105
м·с-1 на частоте
3800 ГЦ,
Грузоподъемность до
100 г.
Испытания акселерометров на воздействие удара ИШI вибра­
ции проводятся в трех взаимно перпендикулярных положениях,
в одном из которых ускорение действует вдоль его рабочей оси
[218], ЗначеЮIЯ ускорений и продолжительность воздействия ого­
вариваются программой испытаний. После испытаЮlЙ и визуаль­
ного осмотра определяют коэффщиент преобразования и резо­
нансную частоту в продольном и поперечном направлениях,
259
ГЛАВА
10
ОЦЕНКА КАЧЕСТВА И ИНФОРМАТИВНОСТИ
ПЬЕЗОЭЛЕКТРИЧЕСКИХ АКСЕЛЕРОМЕТРОВ
Широкий ассортимент выпускаемых пьезоэлектрических дат­
чиков, в том числе акселерометров, ставит задачу сравнения их
по некоторым обобщеIПIЫМ показателям качества (ОПК). Не­
обходимые оценочные ВemIЧIПIЫ (критерии), :как частные, так
и обобщенные, представляют собой модели качества существу­
ющих датчиков, Несмотря на то, ЧТО вопросу выработки крите­
риев объе:rcrивной оценки датчиков было посвящено значитель­
ное количество пуБШlIffiЦИЙ различных авторов, даЮIaЯ проблема
до настоящего времени не может считаться решешюй в полной
мере. Отчасти это связано с тем, что невозможно выработать уни­
версальный критерий в виде численной системы показателеЙ.
позволяющий производить СРЗВЮlтельный анализ с учетом пол­
ной оценки совокупности всех свойств. Кроме того, существуют
и прmщlПIИально разные ПОДХОДЫ к выбору критерия оценки, На­
пример, для разработчика наиболее важными могут быть оценка
достигнутых результатов и сопоставлеЮIе технического уровня
продукции с известными аналогами. а для потребителя
-
выбор
датчика для проведения конкретных измереIШЙ в реальных уело­
виях эксплуатации, В последнем случае. несоответствие датчика
заданным условиям применения только лишь по одному парамет­
ру свидетельствует о его неприroдности. несмотря на значение
ОП:К, полученное без учета всех теХIШческих характеристик,
необходимых для данной задачи измереIШЯ, Тем не менее, ОП:К
различных датчиков позволяет анализировать возможные пути их
совершенствования, оценивать технический уровень разработок,
выявлять наиболее эффеIcrИвные конструкции
[10, 226, 227],
Для большей определенности и достоверности оценку и срав­
неЮlе целесообразно производить внутри групп датчиков (под-
260
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
классов), исходя из их назначения, области применения и ряда
оговоренных специфических свойств, связанных с условиями
эксплуатации, ВКJПOчая конструктивные особенности.
Существуют различные подходы к определению lI.."]Jитериев
оценки,
некоторые
из
которых,
преимуществеюю
для
пьезоэ­
лектрических акселерометров без встроенных СУ, рассмотрены
IПIже,
Исходя
из
взаимосвязи
частоты
установочного
резонанса
и коэффициентов преобразования акселерометра, согласно фор­
мулам
(2,18)--{2.20), в работе [228] простеЙIШIм критерием
качес­
тва предлагается считать значеlПlе приведенного по частоте коэф­
фициента преобразования K~:
(10.1)
где Кор
-
коэффициент преобразования сравниваемых акселеро­
метров по заряду или напряженШQ,
При сравнении акселерометров, независимо от содержания
в них встроенного СУ, коэффициент преобразования целесооб­
разно заменить пропорциональной величиной, не связанной с
коэффициентом усиления. В качестве такой ВeJПIчины выбрана
разрешающая способность акселерометра
R, определяемая как
ПОJПюе число ступеней (квантов), вписывающихся в полосу пог­
решности во всем рабочем динамическом диапазоне
дельное разрешение,
в
основном,
определяется
[229],
Пре­
уровнем шума
измерения, ВКJПOчающего внешний фоновый шум и собственный
шум датчика, непосредственно связанный с шириной его рабоче­
го диапазона частот, С учетом сказанного, формула
ВИД
(10.1)
примет
[228]
(10.2)
Естественно, что такой критерий оценки не учитывает многие
другие характеристики и в основном пригоден для приблизитель­
ной оценки и сравнения однотипных изделий.
261
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
в работе
[130] предложено проводить оценку уровня разработ­
ки акселерометров, используя связь между коэффициентом пре­
образования по напряжеIШЮ, частотой установочного резонанса
и массой акселерометра в виде
K"=Y.~,
(10.3)
где у - коэффициент пропорциональности, среднее значеIШе ко­
торого у
= 5,016, и доверительный IПIтервал для у
тью 0,9S'1'составляет 3,879 ~ у'1' ~ 6,489,
'1'
Данная
зависимость,
отражающая
связь основных параметров (рис,
с вероятнос-
среднестатистическую
10,1),
характеризует средне­
мировой уровень выпускаемых акселерометров, Например, если
точка, соответствующая параметрам акселерометра, лежит выше
верхней кривой, то уровень его разработки можно считать выше
среднемирового,
К.
v;;;з
50
0,5
0.1
Рис.
1
5
10
50 60
коэффициентом прео6разования,
частотой установочного резонанса
и массой в интервале значений у ер
262
fp,
10.1. Статистическая связь между
кГц
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
Для оценки технического уровня пьезоэле:rcrpического акселе~
рометра в работе
[126]
предлагается для :каждого из подклассов
датчиков создавать идеальную модель, с :которой должны сопо~
ставляться реальные датчики даююго подкласса. Идеальная MO~
дель создается на основании отбора ЛУЧIШIХ динамических, мет­
рологических, конструктивных и других важных характеристик
известных датчиков соответствующего подкласса. Необходимые
характеристики, не имеющие ч:ислеlПlОГО значения (наличие сим­
метричного Bыхоа, тип креШIения и другие), учитываются весо­
выми коэффициентами, определяемыми экспертной оценкой для
каждого конкретного назначения датчика. В даlПlОМ случае кри­
терий оценки представляется в виде
i
G1
k,,~ + ;: kj,щ
j~] k;,пд
n+m
где kj , "Р'
k
j,
ид
f
k,,~
j~1 kj.ep • 1~1 k~ПД
(10,4)
р
численные значеIПIЯ i-гo параметра соответствешю
-
сравниваемого и идеального акселерометров, УВeJШчение ко­
торых повышает теХЮlческий уровень датчика (например,
верхняя граничная частота, коэффициент преобразоваIПIЯ);
~,cp' /S'ИД
но
-
численные значенияj-го параметра соответствен­
сраВIшваемого
и
идеального
акселерометров,
СЮlжеffilе
которых повышает технический уровень датчика (например,
О:КПП, масса, нижняя граничная частота);
k/, ер' k,. uд -
коэффициенты весомости l-й конструктивной осо­
бенности соответствеlПlО сравЮlваемого и идеального акселерометров;
nт
-
количество '-ых параметров;
КQШIчество j-ыx параметров;
р
- КOJШчество весовых коэффициентов,
Численное значеffilе критерия G 1 для идеальной модели дат­
чика равно 1, для реальныхдатчИКQВ G 1 < 1, СравнеЮlе акселеро263
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
метров между собой осуществляется путем сравнения соответ­
ствующих численных значеlПlЙ
G 1,
СраВlПIтельная оценка акселерометров, особенно разных про­
изводителей, затруднена еще и тем обстоятельством, что изгото­
вители не всегда достаточно полно и единообразно описывают
их характеристики, для обобщенного анализа акселерометров
(без встроеlПIЫХ дополнительных устройств) и определения их
примеlПlМОСТИ для конкретных условий эксплуатации, по край­
ней мере, должны быть известны приведенные ниже характерис­
тики
[46].
Динамические:
коэффициенты
преобразоваIШЯ
по
заряду
и напряжеIШЮ; частота установочного резонанса; ОКПП; рабо­
чий диапазон частот при задаlПlОЙ частотной погреппlOСТИ с опре­
деленным входным сопротивлением СУН; виброустойчивость
и вибропрочность; удароустойчивость и ударопрочность,
Электрические: емкости без кабеля и с кабелем, сопротивле­
ние изоляции при нормальной и максимальной температурах;
наличие электрической связи между корпусом и пьезоэлементом,
а также симметричного выхода.
Физические: материал и ВИД деформации пьезоэлемента; коли­
чество компонентов; материал корпуса; размеры и масса; вид и ха­
рактеристики креплеIШЯ; герметичность; место вывода:кабеля :или
расположеIШЯ разъема; дmша кабеля; показатель надежности,
Точносmные: нелинейность АХ; неравномерность АЧХ; тем­
пературная погрепrnость; коэффициенты ВЛИЯIШЯ магнитного,
акустического полей, деформации основания и статического дав­
леIШЯ; влияние момента затяжки при резьбовом креплеIШИ,
ДоnустИJUые влuяющие факторы: значеIШЯ температур; влаж­
ности; мaпmтного и электрического поля; спrrического и акустического давления,
Немаловажн:ьп.ш: являются наличие серийного выпуска и стоимость,
в квалиметрии средств измереlПlЙ в качестве численной оцен­
ки объема, достигнутого в данном приборе эффек.га, ПРИlПIмают
264
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
значеffilе его объема возможностей
V, измеряемого в еДlПlИцах,
ПОЛУЧИВIШIх наимеНОВaIше ранга. Если считать, что объем воз­
можностей должен быть пропорционален средним общественно
необходимы:м затратам т на достижение объема возможностей,
то соотношеffilе G = V/m , где т - масса датчика, будет характе­
ризовать его эффективноhь кон~укции [10, 230, 231].
Тогда значение ОПК пьезоэлектрического датчика
быть представлено в следующем виде
V
G,
G1
может
[227, 232]:
К'
=~=~lJx,"
(10.5)
где К - коэффициент пропорциональности;
x~'
(i = 1, 2, .", n) - совокупность параметров, принятых
во Вlшмание при анализе;
а.
- весовой коэффициент каждого параметра.
В фор:муле (10,5) в зависимости отсферы применения возможен
учет любых важных для анализа характеристик акселерометра.
При этом характеристики, увеличеffilе которых улучшает качест­
во датчика, должны иметь положительную степень, а увеличение
которых ухудшает качество
-
отрицательную, Абсолютные зна­
чеЮIЯ степеней а. пока не могут быть определены теорerически,
но могут быть нlшдены путем статистического анализа сущес­
твующих датчиков, Коэффициент К вводится для перевода ре­
зультатов расчета в универсальную едиmщy измерения ранг для
сравнеЮIЯ технического уровня различных видов средств измере­
ffilЙ.
Исходя ИЗ формулы
(10.5) и :минимально доступных ДЛЯ любо­
[227] предложили ОП:К
го датчика характеристик, авторы работы
датчиков давлеЮIЯ, который применительно к акселерометрам
имеет вид
(10.6)
где а miЛ
-
максимальное рабочее ускореffilе.
265
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
Рассматривая работу пьезоэлектрических преобразователей
на основании анализа их информационно-энергетической эффек­
тивности, авторы работы
[233] в качестве
ОПК дЛЯ оценки пьезо­
эле:rcrpических акселерометров получИШI выражеlПlе
(10.7)
где
8
-
абсолютное значение максимального отклонеlПlе пре­
д~ной рабочей температуры от 20 ОС;
118/2уо - отношеlПlе температурного диапазона к относитель­
ной температурной погрешности;
Спр
а
емкость преобразователя акселерометра;
-
-
предел измереlПlЯ ускорения (нижнее граlПlчное значе­
~e);
у
-
коэффициент поперечного преобразования.
При определении по:казателя G4 , кроме таких характеристик,
:как коэффициент преобразоваlПlЯ, частота установочного резо­
нанса
и масса акселерометра, дополнительно
учитываются его
ОКПП, допустимый диапазон температур и относительная тем­
пературная погрешность, Отношение
(10.8)
где
W,. I
-
эле:rcrpическая энергия на выходе преобразователя при
единичном
(1
м·с-2 ) значении ускореlПlЯ,
Под значеЮIем СО ПОдРазумевается сумма емкости пьезоэле­
мента Сп и ДОПОJПlИтельной емкости Сд ' которая образована пара­
зитными емкостями в датчике, в том числе е:мкостями изоляторов
и внутренних проводников, В некоторых конструкциях акселеро­
метров, особенно при малых значеlПlЯX Сп' ВЛИЯlПlе Сд на коэффи­
циент преобразовaIOiЯ по напряжению и электрическую энергию
может быть довольно значительным, Естественно, что присое.ди-
266
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
нение к преобразователю кабеля емкостью Ск, как и любой дру­
гой емкостной нагрузки, также приводит к СlПlжеIШЮ электричес­
кой энерГШI, то есть с учетом формул
(2.25), (2.26)
и
(10.8)
имеет
место
(10.9)
w,.
где
2 -
электрическая энергия акселерометра с соедlПlИТель­
ным кабелем.
Без учета данного обстоятельства, значеЮIЯ показателя
определенные по формуле
(10,7)
G4 ,
для акселерометров с идентич­
ными npеобразователем и корпусами, будут зависеть от длины их
кабеля, К тo~IY же емкость преобразователя акселерометра, име­
ющего интегрированный с корпусом кабель, :как правило, извест­
на только производителю.
Следует также заметить, что при очень малых значениях коэф­
фициента поперечного преобразования "(п' значение
ное по формуле
(10,7),
G4 ,
найден­
может неоБОСНО8аЮIO возрасти.
на основании проведеlПlОГО анализа характеристик большого
количества акселерометров авторами работы
[234]
предложено
для определения их общего уровня возможности использовать
четыре показателя:
-
показатель удельной чувствительности, связанный с энерге­
тической эффективностью акселерометра через его массу:
(10.10)
-
показатель ДlПшмического диапазона, характеризующий из­
мерительные возможности акселерометра:
kd = /.0""""
где
f -
(10.11)
максимальная рабочая частота, определенная по формуле
(3.11);
267
Пава
-
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
показатель точности, характеризующий точностные xapaк.re­
ристики и устойчивость акселерометра к воздействию влияющих
факторов:
k=~
"
где 'У,
у,'
(10.12)
интервал максимальной погрешности при работе акселе­
-
рометра в реальных условиях эксплуатации;
-
показатель диапазона допустимых влияющих факторов, ха­
рактеризующий эксплуатационные возможности акселерометра:
(10.13)
где
Dj
-
максимально допустимое значение i-гo влияющего фак­
тора, превьппение которого может привести к разрушеlПlЮ аксе­
лерометра.
Считается, что качество акселерометра пропорционально зна­
ченШQ :каждого из введенных показателеЙ. Предлагаемый :крите­
рий основан на сравнении этих показателей со значениями сред­
нестатистических показателей, найденными по
n исследованным
акселерометрам:
Существующая связь между введенными показателями уста­
навл:ивалась путем корреляционного анализа методом наимень­
ших квадратов мультипликативной модели
(10.15)
где а.,
13, у, 3, С -
оцеlПlваемые величины, и в первом приближе­
нии въп'лядит следующим образом
(10.16)
268
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
Это выражение предложено в качестве кщшлексного критерия
оценки, окончательное значеffilе которого
G5
представлено в без­
размерной форме
G5
=-E-.~k~kdk:k; =3,84.10-2 .~k;'kdk:~,
где с' =~k~k)rT4k;
,::;$
26.
В основе критериев
лах
(10.9)
и
(10.17)
(10.17)
G4 и G5 ,
несмотря на имеющиеся в фор:му­
ОТШlЧИЯ, наблюдается во многом общий под­
ход к оценке качества акселерометров, позволяющий ПРИЮlмать
во внимание не только их основные характеристики, но и степень
устойчивости к воздействию влияющих факторов.
Рассмотренные критерии оценки не учитывают в полной мере
всех параметров, конструктивных и эксплуатациоlПlЫХ особен­
ностей акселерометров. Однако они, при условии со6людеIШЯ
ряда ограничений, могут использоваться в качестве основы для
сравнительной оценки технического уровня акселерометров, по
крайней мере в пределах одного подкласса.
Ранее отмечалось, что выбор параметров и КОЭффlЩиентов их
весомости, используемых для оценки, должен производиться ис­
ходя из конкретной цели проводимого анализа. При этом необхо­
дим рациональный подход к их определеншо.
Так, использование в разных случаях при оценке пьезоэлек­
трических акселерометров коэффициента преобразования по за­
ряду или напряжеmпo без учета связывающей их общей емкости
датчика, далеко не всегда однозначно харак.геризует его измери­
тельные возможности. Более уmlВерсальной характеристикой
может быть электрическая энергия на выходе датчика ИШI его
преобразователя. Например, как следует из формулы
(1.6), только
изменение КOJШчества слоев пьезоэлемента при сох:ранеЮlИ его
габаритных размеров, существенно ВJПIЯющее на емкость, напря­
жеffilе и заряд, не сказывается на генерируемой преобразователем
электрической энергии.
269
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
Не существует также однозначной оценки НИЖЮlх значений
рабочего диапазона частот и уровня измеряемых ускореЮlЙ аксе­
лерометров. Во всех случаях эти значеlПlЯ обусловлены совокуп­
ностью параметров датчика и СУ (см. подглавы
3.3
И
3.4), Кроме
того, отношеЮlе сигнал/шум системы акселерометр---СУН, оп­
ределяющее нижнее значение измеряемого ускорения, дополни­
тельно зависит от частоты и емкости датчика
[235].
При исполь­
зовании СУЗ входное напряжение шума появится на его выходе
с коэффициентом шумового усилеlПlЯ преобразователя заряда
в напряжение
k
•
=1+~
(10.18)
с.'
где С
- емкость цепи обратной связи.
CJ;~довательно, повышение коэффициента преобразоваlПlЯ по
напряжению
только путем уменьшения
емкости
пьезоэлемента
ИШI коэффициента преобразования по заряду путем ее увеличе­
IПIЯ далеко не всегда дают положительный эффект, особенно если
речь идет об измерении предельно малых ускорений на возможно
Юlзких частотах, Наилучший результат достигается при оптими­
зации параметров преобразователя с учетом свойств используе­
мого СУ
В
та
качестве
порога
примера
ниже
чувствительности
приведены
вариантов
рометров группы АПП2 (см, рис.
7.6),
результаты
ИСПОЛIIeIПlЯ
расче­
акселе­
отличающихся коли­
чеством слоев пьезоэлемента, в рабочем диапазоне частот от
100
Гц до
5
кГц при работе с СЗУ. Паспортное значение спект­
ральной плотности входного напряжеlПlЯ шумов операционного
усилителя без учета )!Q.ПOЛIПlтельных шумов остальных элемен­
тов схемы е n = 6нВJ...jГц, значеlПlЯ коэффициента преобразования
и электрической емкости акселерометра получены при математи­
ческом моделировании методом конечных элементов.
Порог чувствительности акселерометра с учетом только шумов
СЗУ определялся как 11 = U)U1, где
270
ИN = kneD~ - уровень
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
шума на выходе зарядового преобразователя, и! = К, /СОВ
на­
-
пряжение на выходе зарядового преобразователя при ускореmrn
1 M'C-1,
Результаты расчета для различных параметров пьезоэлемента
и значеЮlЙ емкости в цепи обрапюй связи приведены в табл,
1О, 1,
10.1
Таблица
Расчетные значения порога чувствитеЛЬНОСПI
акселерометра
Параметры п...::шэлем<ШТа
КоэффиппillП
прео6разоВllНИЯ.
пКл·м-1·с'
ПараметрыСЗУ
ЭлелричеСКaJ!
емкостъ, пФ
С"",нФ
1,0
И,,
мв
<.
134,8 50,9
И"
10-4·",·с-'
..в
"
30,4
2)6
6,6
2,"
0,5
134,8
49,9
5,0
27,0
11,0
1,0
68,0
12,5
1,0
68,0
13,5
8,1
1,19
1,5
45,4
5,9
1,0
45,4
6,9
4,1
0,90
2,0
33,8
З,6
1,0
33,8
4,6
2,7
0,80
4,0
17,0
0,9
1,0
17,0
1,9
1,1
0,65
0,5
34,0
2,8
1,7
0,50
Как следует из таблицы, акселерометр с пьезоэлементом мини­
мальной емкости имеет самое низкое расчепюе значение порога
чувствительности, несмотря на меньшее значение коэффициента
преобразования по заряду, Однако в реальных условиях эксплу­
атации данная закономерность, обусловленная только собствен­
ными шумами операционного усилителя, не всегда имеет место
в результате ВЛИЯIШЯ ДОПОЛlПlтельных шумов остальных элемен­
тов схемы и внепrnих помех. В этом случае целесообразен выбор
варианта с более высоким значением коэффициента преобразования,
Такой параметр, как масса акселерометра, учитывается прак­
тически во всех критериях оценки и СЮlжает их количественное
значение. Не вызывает сомнения, что, при прочих равных усло­
виях, акселерометр с меньшей массой всегда предпочтительнее.
Вместе с тем, увеличение массы инерЦИОlПюго элемента и, сле-
271
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
довательно, всего акселерометра необходимо для повышения его
КОЭффlЩиента преобразования, Кроме того, достижеlПlе ряда
необходимых эксплуатационных характеристик акселерометра
шюгда неизбежно связано с ростом его массы и габаритных раз­
меров, В качестве примера на рис,
10,2
схематично изображены
акселерометры, содержащие идентичный преобразователь, но от­
личающиеся конструкцией корпуса,
1,
'.
з
2,Пf,
I
.
l"'mз
"i"
j
"~l ___ "
Рис.
'/
4
10.2. Акселерометры с идентичными преобразователями
1 - преобразователь; 2 - основание;
в корпусах разного типа:
3-
крышка;
4-
:кабель;
5-
металлору:кав;
Акселерометр клеевого крепления (рис.
6-
шryцер
10.2a), за счет возмож­
ности ВЬПIолнения основания МШlимальной высоты, имеет мень­
шие массогабаритные характеристики по сравненШQ с акселеро­
метром резьбового крепления при помощи шпильки (рис,
10,26),
так как высота основаlПlЯ последнего должна превышать глубину
резьбового отверстия, Кроме того, в рассматриваемом случае уве­
личение высоты основаlПlЯ способствует СlПlженШQ КВДО, Конс­
трукция корпуса акселерометра (рис.
10.28) пшроко
применяется
в системах контроля промышленного оборудования, Увеличение
габаритных размеров и массы оправданы возможностью флаIЩе­
вого крепления, надежной фиксацией прочного двухпроводного
кабеля в защитном металлорукаве, применением более толстос­
тенной крышки, обеспечивающей повышенную механическую
прочность и снижеlПlе влияние акустических полей, Практика по­
казывает, что только в результате конструктивных особенностей
272
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
корпуса, оптимально соответствующих условиям эксплуатации,
акселерометры с однотипными преобразователями могут иметь
массы, ОТШlчающиеся до нескольких десятков раз, Наглядным
примером этого могут служить акселерометры ГРYJПI АБ и АК317
(см, подглаву
7.2),
В этой связи, может оказаться полезным сравнительный ана­
лиз электромехamrческих преобразователей акселерометров, Та­
кой подход, доступный разработчику, позволяет анализировать
эффективность работы только преобразователя, исключив влия­
IПIЯ на численное значеlПlе выбранного критерия оценки емкости
кабеля, массы корпуса и конструктивных особенностей его вы­
полнеlПlЯ,
Ниже приводятся результаты сравнения различных вариан­
тов выполнения преобразователя с продольной рабочей дефор­
мацией растяжения--сжатия (рис,
упрощенного
анализа
10.3),
взаимосвязи
выполненного на основе
основных
характеристик
с конструктивными параметрами.
Рис.
10.3. Схемы вариантов
выполнения npеобразователей
с деформацией растяжения--сжатия:
а - с ОДIШм пъезоэлементом; б - с секционированным
пьезоэлементом; в
1-
-
ВЪШQЛненного по схеме тандема;
инерционный элемент;
креIШения; hп • j и Sп. j
-
2-
пьезоэлемент;
3-
поверхность
высота и IШощадь поперечного
сечения пьезоэлемента
273
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
Рассмотрены три основные схемы преобразователя:
-
с ОДIШМ однослойным или многослойным (с параллельным
включением слоев) пьезоэлементом (рис. 10.3а);
-
с несколькими последовательно включеlПlЫМИ пьезоэлемен­
тами равной высоты И площади (с секционированным пьезоэле­
ментом) (рис.
-
10.36);
с двумя идентичными однослойными последовательно вклю­
чеlПlЫМИ ИЛИ многослойными параллельно включенными пьезоэ­
лементами (схема тандема) (рис.
10.38).
Варианты преобразователей, выполнеlПlые по этим схемам,
могут отличаться массой Шlерционного элемента тu,J~ высотой
пьезоэлемента hп,;' площадью его поперечного сечения 8п,;' коли­
чеством слоев в пьезоэлементе n. и общим числом пьезоэлемен­
тов N., для определения характер~стик преобразователей исполь­
зов~сь формулы (1.6), (2.11)-{2.13) и (10.8) с учетом принятых
в подглаве
2,2
рациональных допущеlПlЙ и условий. Пред;пола­
гается также, что пьезоэлементы преобразователей выполнены
из
IllVI
слоев
с ОДШIаковым:и параметрами, а толщина токопроводящих
(внутренних эле:rcrpоДов) многослойного пьезоэлемента
пренебрежи:мо мала и не влияет на его КОЭффlЩиент упругости,
В табл.
10.2
для удобства сравнения приведены конструк.гив­
ные параметры и относительные значения характеристик вариан­
тов преобразователей, выраженные через соответствующие зна­
чения (с индексом
1)
базового варианта. При этом используются
следующие обозначения:
м = тп .; Н = ~, s = ~ - КОЭффlЩиенты пропорциональнос,
m1
~
81
ти, связывающие соответствующие значения конструктивных па­
раметров i-гo и базового вариантов;
Кн..J~ Кз,;' Сп,J~ Wp • j' W,.j - коэффициенты преобразования по
напряженШQ и заряду, электрическая емкость преобразователя,
частота
установочного
резонанса,
электрическая
энергия
при
едlПIИЧНОМ значеlПlИ ускорения, соответственно, для различных
вариантов.
274
ТаБЛlща
10.2
OrНОСlПельные значения основных :характерис'ПIК
вариантов выполнения преобразователей
Вариант
I
Схема
КОНСТРУlmUШLlе Mp!IМeYpЫ
(""",ыО)1
f-:'-Чffi1а.
1---------1
,
~
НУ
ij
N,
Хзpaкrepнcrnки преобразовareля
Кы
h,
К"
Мт,
Hh,
т,
h,
Мт,
Hh,
g
.m
n,
К,"
т~
h",
т,
"
Мт,
Hh,
т,
h,
Мт,
Hh,
'"
•<;"
I
N
W~
[п.,
Ю~.I
К"
С,
Юр ••
~KH.1
nМК, .•
Sn'
не.
~'Шр"
---;s-w,.•
К"
~K,.l
~Cl
.fij'(iJp...
~w".
Aiif1r)
Иff,
м'н
fiijW-';
&,
N
TK~. *Кз.l ~С 1
К"
2С.
..fiWp..
S.Yl
2
~~KK.I
nМК>..
2~2CI
ш;
мн ШР • 1
К"
-'к
2 ,,\
iCI
..j2·(i)P.l
&,
2
~HKH" Т К ,.• !Не.
-'к
2 п .•
нл;
~p..l
w"
м'н
r
f
I
!!
"
~
.
~~
,~
~. !I
~
м'н
""'2S w-.;
-'w
2 ,.1
м'н
2.S'W.."
i
J
!
Пава
10. ОцеНlЩ IЩчееmва u uнфоJыImшmосmuu nьезоэлeкmрuчеекux
=елераШ!Л1рО8
Несмотря на ОТШlЧИЯ характеристик, значеЮIЯ показателя
G6.;
определенные по формуле
G6.,=w:·,oo;.J
(10.19)
mИ • J
одинаковы для каждого из рассмотренных вариантов преобразо­
вателя,тоестъ
G6• 1 = G6• 1
= ,,,= G6.;,
В свою очередь, параметры П:М: влияют на показатель
G6 через
~~:~:Иац~: иОО{ п~а~к:~~~т::~=э:~~~н:~~:с~~:~~с:,
измереШIaЯ на частоте, :много меньшей собственной частоты пре­
образователя
[236],
(10.20)
то, с учетом
(1.6)
и
(10.8),
W = m~\d;з = т;\ Q2
,
2s"n 2 е;з
2sпn2
33'
(10.21)
где Qзз = dзз / J;:[; =.,ra;;g;;, - параметр приема П:М:, связаlПlЫЙ
с удельной мощностью и используемый для оценки отношения
сигнал/шум пьезоэлементов
Принимая во ВНИМaJШе
[237-239].
(2.11) и (10.21),
можно найти теорети­
ческое значеЮlе
(10.22)
d'E
где А,. = ~ - коэффициент, харак.геризующиЙ энерго-частот-
'"
ные свойства используемого ПМ.
для преобразователей с пьезоэлементами, выполненных из
различных П:М:, с целью исключеlПlЯ ВЛИЯЮIЯ параметров ПМ,
276
ЛJава
10.
Оцеющ IЩЧeйll8а
u uнфоJыIтшmосmuu nьезоэлeкmрuчщ:кux
aкrелерUllел!рОВ
удобно
использовать показатель
G.,.
позволяющий проводить
сравнительную оценку эффективности работы непосредственно
сaIo1х конструкций;
(10.23)
где
G6'
(10.21)
-
и
фактическое значение
(10.22)
G6• определенное по формулам
на основе результатов измерений характеристик
реального преобразователя,
Если считать. что для идеальной конструкции преобразователя
G6·=G6• тогда, согласно (10.22), значение G7 дОЛЖНО быть равным
еДlПlИце, Для реального преобразователя, например, в результа­
те ВЛИЯIПIЯ межэлементных контактных жесткостей, упругости
конструкционных
материалов,
механического
шунтирования
элементами системы упругого поджатия, внутренЮlХ энергети­
ческих потерь и других фаIcrOРОВ значеЮIе
но, показатель
G7
G7 < 1,
Следователь­
может использоваться для объективной оценки
уровня конструирования совместно с технологическим качеством
выполнеlПlЯ преобразователя.
Возможно использование показателя
G7 и при оценке эф­
фе:rcrивности работы преобразователя в составе акселерометра.
для повьппеlПlЯ точности результатов целесообразно учитывать
ВШlЯllИе емкости кабеля на подводимую эле:rcrpическую энергию
по формуле
(10.9).
Приведенные в настоящей главе различные методы оценки
и сравнения пьезоэлектрических акселерометров могут явиться
необходимой основой для подхода к выбору ОПК в соответствии
с поставлеююй задачей.
277
ЗАКЛЮЧЕНИЕ
Рассмотренный материал дает общее представление о работе
и
ОСНОВНЫХ
конструкциях
пьезоэлектрических
акселерометров
и их электромехаЮlческих преобразователеЙ.
Вместе с тем. остался не затронутым или освещенным дале­
ко не в ПOШlОЙ мере ряд таких вопросов, как сведения о пьезоэ­
лектрических пленках, преобразователях и акселерометрах на их
основе; некоторых технологических особенностях производства
пьезоэлемеНТQВ и акселерометров; методах и результатах их мо­
делировзffiIЯ И др, Это связано или с незавершенностью иссле­
дований и разработок по некоторым направлениям, например
получеlПlЮ и ИСПQЛЬЗОВанmo ТОНКИХ пьезокерамических пленок,
или с нецелесообразностью чрезмерного увеличения объема из­
лагаемого материала. Учитывалась также доступность получения
сведений в специализированной литературе,
Несмотря на значительные успехи в разработке, производстве
и применеmш пьезоэлектрических акселерометров, задачи по их
дальнейшему совершенствованmo по-прежнему актуальны. В ка­
честве таких, наиболее перспективных задач, во :многом общих
для всей датчико-преобразующей аппаратуры, представляются
следующие:
-
повьппение точностных показателей;
расширение рабочих диапазонов частот, измеряемых ускоре-
ний и температур;
-
повьппение стабильности метрологических характеристик во
времени и к воздействию внепrnих дестаБИШIЗИРУЮЩИХ факторов;
-
повышеIШе надежности и ресурса работы в экстремальных
условиях эксплуатации;
-
повьппение помехозащищенности;
уменьшеIШе массогабаритных характеристик;
YJПIфикация конструктивных типов исходя из условий при-
менения;
-
снижение стоимости.
Успешное решение этих задач в значительной степени связа­
но с достижениями смежных научно-теXJПlческих направлений.
278
ЗаклЮЧЕ1ще
Прежде всего, материаловедеIПIЯ (высокоэффективные и высо­
костабильные пьезоэлектрические и КОНСТРУКЦИОlПlые ],штериа­
лы), МИI<pоэлектрOlПlКИ (миниатюрные малошумящие электрон­
ные компоненты, работоспособные в широких диапазонах тем­
ператур и механических нагрузок), кабельной промышленности
(стойкие к различным воздействиям и миниатюрные антивибра­
ЦИOlПlые кабели). Большое значение имеют также научные ис­
следования и разработки по созданmo пьезоэлектрических lШе­
ночных элементов, новых технологий неразъемных соединеIШЙ
пьезоэлектрических
и
конструкционных
материалов,
методов
и средств ИСIIЫТаний датчиков,
Автор надеется, что КIШга окажется полезной специалистам,
работающим по создаIШЮ и эксплуатации датчико-преобразую­
щей аппаратуры для виброметрии, студеНТЮvI и аспирантам, обу­
чающимся по направлениям ((Пьезоэлектрическое приборострое­
IШе» и «(Информационно-измерительная техника и технологии»,
279
ЛИТЕРАТУРА
1,
Кэдu у, Пьезоэлектричество и егопрактическоеприменение,­
2.
Мэзон У. Пьезоэлектрические кристаллы и их прaкrичесЮ)е
М.: ИЛ,
З.
с.
1949. -718
применеlПlе.
-
М.: ИЛ,
1952, - 450
ГлозмонИ А. ПЬезокерамика,
288
-
с,
Изд. 2-е.
-
М.: Энергия,
1972.-
с.
4.
Богуш М В, ПЬезоэлектрические датчики для экстремаль­
5.
Шарапов В. М., MycиeHКI) М. п., Шарапова Е. В. Пьезоэлек­
ных условий эксплуатации.
2006. - 346 с, -
трические датчики
сфера,
6.
2006. - 632
Фесенко Е.
-
Ростов н/Д: Изд-ВО скнц вт,
(Пьезоэлектрическое при60ростроеlШе. - Т.
/
под ред, В. М. Шарапова.
-
3).
М.: Техно­
с.
r., Бородин В. З., Крамаров О. П.
и др. Исследо­
вание режимов поляризации сегнетоэлектричесЮ)й керамики
системы ЦТС
лы.
-1969.
/!
Электронная техника. Серия
-Вып.
r.
Яффе Б., Кук У. Яффе
8.
Най Дж. Физические свойства кристаллов,
9.
Датчики
М.: Мир,
1974. - 289
ная литература,
14.
Материа­
1. -с. 174-181.
7.
Пьезоэлектрическая керамика.
-
М.: Иностран­
1967, - 386 с,
теплофизических
ров: справочник: в
3
т,
/
и
механических
парамет­
под общ. ред. Ю. Н. Коптева;
под ред. Е. Е. Багдатъева, А. В. Гориша, Я. В. Ма.лкова.
М.: ИПРЖР,
10.
-
1998. -Т. 1. Кн. 1.-485 с.
ПроеКТИРОВaJllIе датчиIФВ для измерения механических ве­
личин
/ под ред. Е,
1979. -с. 17&-194.
11.
-
с.
П. Осадчего.
-
М.: Машиностроение,
Сахаров С. А" Забелuн А. н., Медведев А. В, и др. Лангасит
и лангатат
-
новые материалы для ВЫСОIФтемпературных пье­
зоэлектрических сенсоров
// Труды VI Международной
науч.­
техн. конф. ((Инновационные процессы пьезоэлектричесIФГО
приборостроеlШЯ и нанотехнологиЙ».
Рост. гос, педагогического ун-та,
12,
- Ростов нJД:
2008, - С. 68-б9.
Изд-во
Панич А, Е., Вусевкер Ю. А., Филиппов Е. В. и др. Исследова­
ние электрофизических параметров пьезоэлементов из мате-
280
Литература
риалов ПКЛ-1, ПКЛ-2, ПКЛ-3, полученных методом улътра­
дисперсной технологии
//
Актуальные проблемы пьезоэлект­
рического при60ростроения и нанотехнологий.
Изд-во ЦВВР,
13.
2006. -
С.
-
Ростов Н/Д:
11-12.
Гориш А. В., Дудкевич В. П, Куприянов М. Ф. и др. ПЬезоэ­
лектрическое приборостроение
Т.
1,
/
под ред. А. В. Гориша.
Физика сегнетоэлектрической керамики.
-
М.: ИПРЖР,
-
1999. - 368 с.
14.
А. с, 734116 СССР, С04В35/О0. Пьезокерамическийматериал/
ю. А. Вусевкер, В. и. Ривкин, о. п. Крамаров (СССР).
N, 2921078/29-33;
Бюл . .N!! 18.
15,
заявл.
05.09.78;
-
14.06.80. -
олубл.
А. с. 975672 СССР, С04В35/О0. Пьезокерамическийматериал/
14.06.82. -
О. П. Крамаров, Ю. А. Вусевкер, Л. В. Джения и др. (СССР).
N, 3286871/29-33;
Бюл . .N!! 43.
16.
заявл.
23.11.82;
опубл.
Богуш М В., Гориш А. В., Кривцова С. П Тепловое расшире­
ние пьезокерамических материалов ЦТС-83Г и ТВ-2
зоэлектрические материалы и преобразователи.
Изд-во Рост. ун-та,
17,
1985. -
С,
-
//
ПЬе­
Ростов Н/Д:
24-29.
Крамарова Л П, Леnендина Л. Ф., Тарасова Г Б. Исследо­
вания старения некоторых составов пьезокерамики
электрические материалы и преобразователи.
Изд-во Рост. ун-та,
1971. -
С.
-
//
Пьезо­
Ростов н/д:
1611-165.
18.
Гориш А. В., Горбунов с. М, Вусевкер Ю. А. и др. Исследова­
19.
Бородин В. З., Кра.маров О. П, Кривцова с. П и др. О при­
ние процесса старения пьезокерамики в условиях длительно­
го хранения
// Радиотехника, -1995.
-х!!
10. -
С,
55-56.
роде внутреНlШХ полей в сегнетоэлектриках
СССР.
-
Серия физическая,
- 1969. -
Т,
// Известия АН
XXXIII. - .N!! 7. -
С.1101-1105.
20,
Желудев И с. Основы сегнетоэлектричества.
21,
ПЬезоэлектрическая керамика: принципы и применение
-
М,: Атомиздат,
1973. -472 с.
с анг.л. С, Н. Жукова.
-
Ми.:
/
пер.
000 ((ФУАинформ}}, 2003, -112 с.
281
ЛWIIEратура
22,
Дунаевский В. п., Субботин М. и., Вуколов А. Н. и др. О воз­
можности
совершенствования пьезоакселерометров
щью многослойных чувствительных элементов
ная техника,
-
1980. -
М.; МДНТП,
r. М.
С,
с
помо­
// Вибрацион­
23-26.
23,
Свердлин
24.
Римский-КорсаковА. В. Электороакустика. - М.: Связь,1973.-
Прикладная гидроакустика: уче6. пособие.
25,
Аронов Б. С. Электромеханические пре06разователи из пьезо­
2-е ИЗД., перераб, и доп. -Л.: Судостроение,
-
1990. - 320 с,
272 с.
электрической керамики,
ское од-ние,
26.
1990, - 272
-
Л.: Энергоатомиздат. Ленинград­
с.
Справочник по гидроакустике
ников, Е. А. Корепин и др.
Судостроение,
27,
-
/
А. П. EBТIOТOB, А. Е, Колес­
2-е ИЗД., перераб, и доп,
-
Л.;
1988. - 522 с.
Казаков В. К, Климашин В. М. Биморфные пьезокерамиче­
ские элементы
//
ПЬЕЗОТЕХНИКА-2002: материалы Меж­
дунар. науч.-практ. конф. «Фундаментальные проблемы пье­
зоэлектрического приборостроения».
-
М,; :миРЭА,
С.226-232.
r.
2002, -
28.
Дунаевский В. П, Веселова Е. Ю., Архиnеmшва
29.
Вусевкер В. Ю., ДОЛЯ В. К., Панuч А. Е. МодеРlllIЗированные
30.
Плужников В. М.,
31,
Лебедев Э. В., Мunяева О. В. Зависимость резонансной час­
Малогабаритный акселерометр
М.: МДНТП, 1990.-С.
//
н и др.
Вибрационная техника.
-
2(1-22.
пьезочувствителъные элементы в датчиках вибрации
// Датчи­
-2003, -N2 11, - С. 28-30,
Ce.jweHOB В. С. Пъезокерамические
Энергия, 1971. -168 с.
твердые
ки и системы.
схемы. -М.:
тоты электромеханического преобразователя на основе пье­
зокерамики от параметров стяжки
материалы Междунар.
ные
проблемы
М.: МИРЭА,
32,
//
ПЬЕЗОТЕХЮIКA-2002;
науч.-практ, конф.
пьезоэлектрического
2002. -
С.
«Фундаменталь­
приборостроеШ1Я}).
-
273-277.
Бутов В. и., Вусевкер В. Ю., Мокров Е. А. и др. Высокотем­
пературные пьезоэлектрические датчики быстропеременных
282
Литература
давлений малых и сверхмалых уровней
2002:
// ПЬЕЗОТЕХНИКА-
материалы Междунар. науч.-практ. конф. «Фундамен­
тальные проблемы пьезоэлектричесIФГО приборостроеШllD),
М.: МИРЭА,
33.
2002. -
С.
-
277-281.
Вусевкер В, Ю., Дунаевский В. П, Пани"Ч А. Е. Исследование
путей совершенствования пьезокерамических чувствитель­
ных элементов виброизмерительных датчиков
//
ПЪЕЗОТЕХ­
lПIКA-2002; материалы Междунар, науч.-практ, IФнф. «Фун­
даментальные проблемы пьезоэлектрического приборострое­
IШЯ}}.
- М.: МИРЭА, 2002. - С. 237-243.
NJ! 2150117 РФ, GOIP15J09. Пъезоэлектрический аксе­
/ Ю. А. Вусевкер, А. В. Горит, В. П, Дунаевский
и др. - Опубл. 05.08.2000. - Бюл. N2 22.
35. Нориш Ю. И Виброметрия. - 2-е изд" перераб. и доп, -
34.
Пат,
лерометр
М.:
Гос.
науч.-техн.
1963. -771
36.
изд-во машиностроительной лит-ры,
с.
Кобяков И Б., Сперанский А. А. Векторные вибропреобразо­
ватели для достоверного пространственного МОllllторинга
Актуальные
проблемы
ения и нанотехнологий.
пьезоэлектрического
-
//
приборостро­
Ростов нJД: Изд-во ЦВВР,
2006. -
С.134-140.
37,
Приборы и системы для измерения вибрации, шума и удара;
38.
Яворский В. М, Детлаф А. А, Справочник по физике.
39.
Датчики теплофизических и механических параметров: спра­
40,
Ерофеев Н К. Пьезоэлектрические измерительные преобра­
справОЧIlllК: в
2
кн.
/
под ред. В. В. Клюева.
М.; Машшю­
-
строение,1978.-Кн.l.-448с.
М.: Наука,
вочник: в
1999. -
Т.
3 т. / под общ.
2. - 688 с.
ред. Ю. Н, Коптева,
зователи ударных УСIФрений,
41,
-
1981. - 507 с.
-
Л,; ЛДНТП,
-
М,; ИПРЖР,
1970, - 28
с.
Бенедиктов С. М., Голиков А. П О IФнтроле собственной
частоты пьезоэлектрических преобразователей с предвари­
тельным поджатием
JJ
Виброметрия.
-
М,; мДНШ,
1982, -
С.142-143.
283
ЛWIIEратура
42,
Петш И. В., ПеРШUll Д. П, Ложкин Л В, Вmrяние спосо­
ба крепления датчика на измерение вибрационных и удар­
ных ускорений
Т,
2,
Электротехническая аппаратура: в
//
Электрические
мanrnHЫ.
М.:
-
2 т. 1971, -
Энергия,
С.178-184.
43,
Степанов В. И. Оценка различных методов крепления дат­
чиков вибрационных ускорений
М.: МДНТП,
44.
1968. -
с.
Вибрационная техника.
/!
-
73-80.
Ерофеев Н К, Рыбакова И. А. О расчете коэффициента пре­
образования образцового пьезоакселерометра
тельным поджатием
с
J/ Вибрационная техника, -
предвари­
М.: МДНТП,
1975. -с. 19&-200.
45,
Ерофеев Н. К, Пастернак А. М., Пеллuнец В, С. Образцо­
вый
пьезоэлектрический
измерительный
преобразователь
ударных ускорений
J/
Вибрационная техника.
М.: МДНТП,
с.
3-7.
1971. -
-
46,
Раков В. И. Об оценке качества пьезоакселерометров
47,
Рощuн Ю. А., Юршаев Ю.
мorpия.
-
М.: МДНТП,
1979. -
с.
48,
с.
и др. Особен­
// Проблемы прочности. -
82--1!4.
ГоришА. В., ПаничА. Е. Проблемы создания датчИlФВОЙ аппа­
ратуры на основе пьезоэлеменТQВ
//
Пьезоактивные материа­
ЛЫ. Физика. Технология. Применение в приборах. - Вып,
Ростов нJД: Изд-во Рост. ун-та,
49.
1. -
J/ Вибро­
69--71.
r., КлlШенко В. А.
ности работы виброакселерометров
1973. -N, 11. -
Сб.
1992, -
С,
10. -
25- 28,
Ерох Е. Т Применение измерительных систем фирмы «Брюль
1973. - 308 с.
G. MesswertverfaJ.schungen durch Ankорреl­
und Umweltfliisse an elektromechanischen Schwingungsaufnehmern/JMeas. undlnstrum.ActaIМEKO 1973.-V 3, -Amsterdam,
1974. - S. 339-348.
51. PiezoelectricAccelerometers and Vibration Preaтplifiers /! ТЬеО1'У
andApplication Handbook, - Naerum, Dешnark; Briiel and Kjrer,
1976. -102 р.
и Къер)) для измерения механических .колебаний и ударов.
Нерум, Дamrя: Брюль и Къер,
50.
284
Kleinтiche/
Литература
52,
Степанов В.
И.
Погрешности
измерения вибрационных
ускорений, вносимые поперечной чувствительностью дат­
чиков
//
Вибрационная техника.
-
М.: МДНТП,
1968. -
С.115-123.
53.
Бабер И С. ИсслеДОВamIе погрешности пьезоакселеромет­
ров от влияния поперечных ускореlll1Й: автореф. дис,
техн, наук.
-
Л.:
1975, - 23
, ,
канд,
с.
54. Knight А. L. А brief revive of the monitoring of vibration in
rotating machines // Noise Control Vibration and Insulation. 1977. - v. 8. -Р. 168-170.
55. Голубев В. С. К оценке измерительных свойств акселеромет­
ров линейных ускорений
// Виброакустические процессы в ма­
- М.: Наука, 1974.-
шинах и присоединенных конструкциях.
С.83-98.
56,
Дунаевский В. П, Субботин М, И, ВуК1)лов А. Н и др. ВЛИЯlПlе
механических, тепловых и электрических воздействий на по­
казание пьезоэлектрических акселерометров
техника.-м.:мДнm, 1976.-С.
57,
// Вибрационная
15-27.
Козлов В. В, О модели пьезоэлектрического виброизмери­
тельного преобразователя при действии вибрации и дефор­
мации объекта; Рост. ун-т,
в ВИНИТИ
-
Ростов нJД,
1983. - 15
с. Деп.
13.01.1984, N, 332-84.
58.
Цеханский К. Р., Войтенко В, Б. ВЛИЯlПlе переменного магнит­
59.
Лассан В, Л, Ерофеев Н К., Пеллинец В. С. и др. Опыт раз­
ного поля большой интенсивности на пьезоакселерометр
Вибрационная техника. -М,: МДНТП,1978. -с,
работки аппаратуры для измерения параметров движеlПlИ.
л.: ЛДНТП,
//
137-141.
-
1972. - 24 с.
60,
Пеллuнец В, С. Измерение ударных ускорений.
61,
Иванов В. И, Машарский Б. Н О факторах, влияющих на по­
стандартов,
1975, - 288
-
М,: Изд-во
с,
грешности измерения звуковых вибраций, и методах умень­
шения этих погрепrnостей
JJ Труды ЛенинградсIФГО IФраблес­
троительного института.
Вып,
-
109. -
IФГО IФраблестроительного института,
Л,: Изд-во Леюшградс­
1976. -
С.
84--88.
285
ЛWIIEратура
62,
Серрuдж М., Лихт Т. Р. Справочник по пьезоэлектрическим
63,
Цеханский К. Р
акселерометрам и предусилителям.
и Къер,
1987.-201
Нерум, Дания: Брюль
-
е.
Пьезоэлектрические акселерометры (пути
совершенствования)
//
Виброметрия,
-
М,; МДНТП,
1973, -
С.41-48.
64. Epstein В. Nuclear radiat:ion effects оп accelerometers J/ Endevco
TDRev. -1970.-N2 6. -Р. 1-10.
65, Дунаевский В. П, ВуКl)ЛО6 А. Н, Субботин М. Н и др. Пье­
зоэлектрический
преобразователь
ускорений
в потоках излучения большой интенсивности
рические материалы и преобразователи.
Рост. ун-та,
66,
Янчич В.
1976. -
В.
С.
-
67,
1982. -
работы
Пьезоэлект­
175-179.
Влияние
гамма-облучения на характеристи­
ки пьезоэлектрических акселерометров
М.: МДНТП,
для
//
Ростов нJД: Изд-во
С.
//
Виброметрия.
-
137-139.
Григоренко Н Н, Михайлов П к., Степанов В. И Устойчи­
вость пьезоэлектрических датчиков ускорения
//
Вибромет­
рия.-М.: мднт, 1982.-С.128-131.
68.
Пелых Н А., Макеев
r. н, Налетов Ю. Н Дрейф нуля пьезоэ­
лектрических измерительных преобразователей при больших
ускорениях и температурах
мерительная техника}}).
69.
// Метрология (прил. к журн.
-1975, - N2 4. - С, 44--48.
«Из­
Субботин М. И, Дунаевский В. П, Вуколов А. Н О работе пье­
зоэлектрических акселерометров при воздействии неIФТOРЫХ
ВЛИЯЮЩИХ факторов // Пьезоэлектрические материалы и преоб­
разователи, -Ростов нJД: Изд-во Рост, ун-та,
70.
1977, -с. 94--100.
Болдырева З. П, Экнодuосянц Е. И, Янчич В. В. Исследова­
lllIе микроструктуры пьезоэлектрических виброизмеритель­
ныx преобразователей в связи с проблемой их стаБIШЬНОСТИ
в условиях знакопеременных механических воздействий
Пьезоэлектрические материалы и преобразователи,
тов нJД: Изд-во Рост. ун-та,
71,
Дунаевский В. П
1977. -
С.
-
//
Рос­
3-7.
Работа акселерометра в условиях комп­
лексного воздействия ВЛИЯЮЩИХ факторов большой интен-
286
Литература
сивности
Вибрационная техника.
11
-
М.: МДНТП,
1977. -
С.44-50.
72,
ГОСТ ИСО
5347-0-95.
Вибрация. Методы калибровки дат­
чиIФВ вибрации и удара.
01.07.1997.
73,
-
Ч. О. Общие положения.
-М.: Изд-ВО стандартов,
-
Введ.
1996. - 32 с.
Степанов В. И. Погрешности измерения вибрациоlПlЫХ уско­
рений, зависимые от поперечной чувствительности датчиков 11
ВибрациоlПlая техника. -М,: МДНТП,
74.
ческих акселерометрических датчиков
1ШЮi.
75,
1966. -
С,
115-123.
Бараш В. Я. О поперечной чувствительности пьезоэлектри­
-1964. -N, 11. -
С.
11
Измерительная тех-
28-31.
Голубев В. С. О поперечной чувствительности вибродатчика 11
ВибрациоlПlая техника. -М.: МДНТП,
1981, - С, 103-107.
Piezoelektrische Bescbleuningsaufnehтer mit hoher
Richtungsselekt:ivitat 11 - Messen. - Steuem - Regeln. - 1970, N2 9. - S. 337-339.
76. Irrgang
77,
В.
Санин Е. Н, Козлов В. В., Санина Н. Д. Влияние наклона век­
тора поляризации на поперечную чувствительность вибро­
измерительного преобразователя
М.: МДНТП,
78.
1980. -
С.
11
Вибрационная техника.
-
38-42.
Козлов В. В. О взаимосвязи типа деформации чувствитель­
ного
элемента
пьезоэлектричесIФГО
виброизмерительно­
го преобразователя и относительного коэффициента попе­
речного преобразования
и преобразователи.
-
11
Пьезоэлектрические материалы
Ростов нJД: Изд-во Рост. ун-та,
1985, -
С.63--М.
79.
Пат.
80,
А. с,
N.!! 2159444
РФ,
GOIPI5/09.
Способ настройки виброиз­
мерительного преобразователя 1 А. А. Кирпичев, М. Ю. Ново­
- Опу6л, 17.06,2000. - Бюл. N.!! 18.
708234 СССР. Способ регулировки пьезоэлектричесIФГО
селов.
преобразователя
1 В.
В. Козлов, В. В. Янчич, В. И, Донсков
- N, 2568609/18-10; заявл. 04.01.78; опубл. 05.01.80. 1.
81, Каталог 1989/90 r:: Электронная аппаратура. - Нерум, Дания:
Брюль и Къер, 1989. -796 с,
И др.
Бюл.N.!!
287
ЛWIIEратура
82,
Кованина Н Н Оценка методической погрешности градуи­
ровки ударных акселерометров баллистическим методом
Виброметрия. -М.: мднтп,
83,
11
ханическом нагружении
М.: МДНТП,
84.
1971. -
с.
Вибрационная техника.
Таганрог: ТРШ,
-
Сб,
1, -
46-49.
Кра.марова Л п., Тарасова
r. в. Амплитудная зависимость па­
11 Прикладная
1973. -с б4-72.
раметров пьезокерамики
85,
11
1982. -с. 151-153.
Кованина Н. Н. ИсслеДОВaJllIе свойств пьезокерамики при ме­
акустика.
-
Вып.
5. -
Са.моЙЛенко Н. Т. Влияние различных факторов на стабиль­
ностьчувствительностипьезоэлектрическихакселерометровll
Датчики и вибрационная аппаратура,
-
Киев: КДНТП,
1969.-
С.3-8.
86,
Янчич В. В. Исследование и разработка МОНQШlТных пьезо­
электрических измерительных преобразователей ускорения;
дис.
87,
, ..
кaJIД. техн. наук.
-
М.: НПО «Фоною>,
1986. - 133
с.
Новицкий П. В. Расчет и проектирование пшрокополосных
пьезоэлектрических акселерометров
11
Приборостроение.
19БО. -N, б. -с. б-9.
88. Instructions and Applications. Accelerometer Sets
Туре
Accelerometer Packages Туре 4352/55, - Naerum,
ВЛiеl and Kjrer, 1969, - 86 р.
r. п.
-
4312/15.
Dешnark:
89.
Нуберт
90.
Раков В. И Эквивалентные схемы пьезоэлектрического аксе­
ских величин,
лерометра
11
Измерительные преобразоваТemI неэлектриче­
-
Л.: Энергия,
1970,
Вибрационная техника.
-
М.: МДНТП,
1975. -
С.192-197.
91, Giera Н. д, Rindelhardt и, Untere Grenzfrequenz und
Ansprechschwelle von piezoelektrischen Beschleunigungsaufnehmer. - Massen. - Steuem - Regeln. - 1979, - N!! 22, - S. 705-
709.
92,
ГиК Л Д Измерение вибраций.
291
93,
с.
Синдеев Ю,
-
Новосибирск,; Наука,
1972,-
r., ЯНЧUЧ В, В. К вопросу о чувствительности пье­
зоэлектрического акселерометра в широком диапазоне частот 11
288
Литература
ПЬезоэлектрические материалы и преобразователи.
- Рос­
тов нJД: Изд-во Рост. ун-та, 1971. - С. 41--45.
94. Accelerometers. Instructions and Applications. Accelerometers
Туре 4332, 4333.,. - Nаелun, Dешnark: Briiel and Kjrer, 1974.155 р.
95,
Мuгаль Ю. Ф., ЯНЧUЧ В. В., ДОНС1(l)В В. И. и др. Об определе­
нии рабочего диапазона частот пьезоэлектричесIФГО измери­
тельного вибропреобразователя
риалы и преобразователи.
-
Пьезоэлектрические мате­
/!
Ростов нJД: Изд-во Рост, ун-та,
1976. -с. 4-9.
96.
Цexaнcкuй К. Р., Васильева Р. В. ВЫСОIФтемпературные пье­
зоэлектрические
акселерометры
для
измерения
J/
современных энергетических установок
М.: МДНТП,
97,
1979. -
с.
вибрации
Виброметрия.
-
43-52.
Козлов В. В, Методы исследования и снижения погрешностей
пьезоэлектрических
виброизмерительных
преобразователей
при измерении параметров пространственной поcryпaтельной
вибрацlШ с учетом деформации объекта: дис,
наук. -Л,; ВlIИlllvI им. Д. И. Менделеева,
98,
.,. канд,
1985. -137 с.
техн.
Кuрnuчев А. А. Повышение эффективности диагностики с ис­
пользованием пьезоэлектрических и вихретоковых преобра­
зователей; дис.
- М.: Моск. гос. академия
2006. -143 с.
«Endevco», 1973-1979.
100. Каровецкий В. Н. О выборе пьезоакселерометров // Вибраци­
онная техника. - М.; МДНТП, 1980. - С, 47-51,
, ,
канд. техн, наук.
приборостроеlШЯ и информатики,
99.
Сводные каталоги фирмы
101.ЗасецкuЙ В.
r.,
Тихвинскиu А. Н. Обеспечение помехоустой­
чивости виброканалов штатных систем ви6роконтроля газо­
турбинных газоперекачивающих агрегатов магистральных
газопроводов
// Материалы ВсероссийсIФЙ науч.-техн. конф.
21-25 апреля 2008 г, -
«Механометрика-2008», Суздаль,
М.; Метрологическая ассоциация промышленников и пред­
принимателей,
102. Засецкuй
В.
r.,
2008. -
С,
71-73.
Тихвинский А. Н. Экспериментальные иссле­
дования причин возникновения и способов устранеlШЯ низ-
289
ЛWIIEратура
IФчастотных помех виброизмерителъных каналов IIIТaTHЫX
систем виброконтроля ГПА с авиа- и судовыми приводами
11
Материалы семинара «Диагностика оборудования и трубоп­
роводов КО,.
М.: ГАЗПРОМ,
-
103. Пат. N, 2370882 РФ,
пъезодатчика / И. И.
2004. - Т. 1. - с. 28-32.
03F 3170, 03F 3/45. Усиmrreль заряда
104.
для
Радчик, В. Н. Тараканов, О. Б, Скворцов
и дР. -Опубл. 20.10.2009.-Бюл.
N,29.
Скворцов О. Б, Измерение вибросIФРОСТИ пъезодатчиками
Труды
VI
11
междунар. науч.-техн. IФнф, «Инновационные про­
цессы пьезоэлектрического приборостроения и нанотехноло­
гий)),
-
2008.
-с. 14~152.
Ростов нJД: Изд-во Рост. гос. педагогического ун-та,
105.ДунаевскuЙ В. п., Вуколов Н. А., Мухин Н П.
u
др. Пьезоэлек­
11 Вибраци­
трический акселерометр повышенной прочности
онная техlПIка,
106.
-
Самойленко Н
вибродатчиков
М.: МДНТП,
Т.
для
1975. -
С,
О проектировании
141-145,
пьезоэлектрических
IФнтрольно-сигнальной
аппаратуры
Вибрационная техника. -М.: МДНТП,1975, -с.
107.
Субботин М И, Ce.MКUH
r.
11
156-158.
и. о погрешности вибродатчиIФВ
вследствие нелинейности и ее экспериментальном определе­
mш// Вибрационная техника. -М.: МДНТП,
108. Цеханскuй
1986, -с. 27-29.
К. Р., PaКl)в В, И Чувствительность пьезоакселе­
рометров к переменным магнитным полям
11
Вибрационная
техника.-М.:МДНТП,1971.-С.15-22.
109. Леонтьев
В. И Пассивная защита от помех на экранах кабе­
лей J/ Вибрационная техника. - М.: МДНТП, 1986, - с. 6-8.
110. ЦеханскuЙк. Р., ВасuльеваР. В. Датчики для контроля динами­
ческих параметров современных энергетических установок 11
Вибрационная техника. -М,: МДНТП,
111. Голубев В.
112. Богуш
1983, -
с.
3-9,
С. Пьезоакселерометры с симметричным выходом 11
Вибрационная техника.
-
М,: МДНТП,
1980, -
С,
27-32.
М В., Maдopcкuй В. В., Гоpuш А. В. Влияние упругого
взаимодействия пьезоэлемента с пуансонами на чувствитель­
ность преобразователя
образователи.
290
-
11 ПЬезоэлектрические
материалы и пре­
Ростов Н/Д: Изд-во Рост. ун-щ
1985. -
с.
67-70.
Литература
113,Дуднаков В, Ю" Санин Е, и., Майковская А, И. Исследование
температурной стабильности пьезоэлектрических виброизме­
рительных преобразователей различного типа
рические материалы и преобразователи,
Рост. ун-та,
114. Лившиц
та
1977. -
-
/!
Пьезоэлект­
Ростов Н/Д: Изд-во
С. ШI-116.
А, З., Ларионова В, П о повышешш коэффициен­
преобразовamIЯ клееных
пьезоэлектрических
мерительных преобразователей
М.: МДНТП,
115, Цеханскuй К
1975. -
С.
J/
виброиз­
Вибрационная TexНlIкa,
путей создания высокотемпературных датчиков вибрации
Вибрационная техника, -М,; МДНТП,
116. Цexaнcкuй
-
154-156.
Р., ВаСWlьева Р. В,, Войтенко В, Б. и др, Поиск
1986, -
С,
//
14--19,
К Р., ВаСWlьева Р. В. Высокотемпературные пье­
зоэлектрические
акселерометры
для
измерения
современных энергетических установок
М.: МДНТП,
117, Цexaнcкuй К.
1979. -
С.
J/
вибрации
Виброметрия,
-
43-52.
Р., Макеев В. П Пути построения высокотемпе­
ратурных пьезоэлектрических акселерометров
наятехника, -М.; МДИТП, 1977,-С,
J/
Вибрацион­
67-72,
118.ДOHCКJJ6 В, И, Ян-чuч В. В., ЛuмаревА, М. и др, Акселеромет­
ры для измерения вибрации при высоких температурах J/ Виб­
рационнаятехника,-М,; МДНТД197К -с,
119.Желудев И
М.: Наука,
С.
120. Дунаевский В, П,
-
Санин Е, И, Донсков В. И Чувствительность
акселерометров к переменным температурам
техника.-М.:мДнm, 1978.-С.
121,
145-151,
Физика кристаллических диэлектриков,
1968. - 464 с.
// Вибрационная
151-159.
Са.моUленко Н Т. ПЬезокерамика для вибропреобразователей;
тезисы докладов Всесоюзной науч,-техн, конф, «Современное
состояние и перспективы развития методов и средств виб­
рометрии и вибродиагностики}},
вилова, 1989, - С, 220--221,
122. Поздняков Н Н, Журавлева
-
М,; ВИТQП им. С, К Ва­
Н С. ВЛИЯНlIе внешних воздей­
ствий на микроструктуру и свойства пьезокерамики
//
Пьезо-
291
ЛWIIEратура
электрические материалы и преобразователи.
Изд-во Рост. ун-та,
1985. -
С,
Ростов нJД:
-
8-11,
123.Д)mаевскиЙ В. п., Ивановский
r. В., Лукашин Ю. В.
Исследо­
вание стабильности пъезосвойств составов ЦТС-19 и ЦТС-23
при реакторном облучении
и преобразователи,
-
/1 ПЬезоэлектрические
материалы
Ростов нJД: Изд-во Рост. ун-та,
1976,-
С.117-120.
124.ДvнаевскиЙ В. п., Вуколов А. Н, Асеев Н А. Исследование
электрических
СМ-2
характеристик
/1 ПЬезоэлектрические
пьезоэлементов
125. Ивакина
на
аппарате
материалы и преобразователи.
Ростов нJД: Изд-во Рост. ун-та,1977, -с,
-
82-89.
И. П, Лукошин Ю. В., Субботин М. И. и др. Иссле­
дование радиационной стойЮ)сти некоторых клеевых соеди­
нений
/1 ПЬезоэлектрические материалы и преобразователи, 1976. -С, 120--124.
Ростов нJД: Изд-во Рост. ун-та,
126. Ковальский
рометров //
В. Н Об оценке технического уровня акселе­
Вибрационная техника.
-
М.: мднтп,
1990. -
С.124-127.
127.Дuмoв Ю. В. Метрология, стандартизация и сертификация:
учебник для вузов. - 2-е изд. - СПб.: Питер, 2006, - 432 с,
128. гостр исо 16063-21-2009. Методы для калибровки датчиков
вибрации и удара - Ч. 21, Вибрационная калибровка методом
сравнения с эталонным преобразователем. - Введ. 01.01.2011,М.: Изд-во стандартов, 2010, - 28 с.
129. КирпичевА. А., РедюшевА. А., Сu.мчук А. А. и др. Новое калиб­
ровочное оборудование для поверки вибропреобразователей
в лабораторных условиях и на месте эксплуатации
// Матери­
алы Всероссийской науч.-техн, конф. (~еханические измере­
lllIЯ и испытания Механометрика-2008», Суздаль,
ля
2008
г.
-
М.: Метрологическая ассоциация ПРОМЫIIIЛенни­
ю)в и предприниметелей,
2008. -
С,
97-102,
130.ДОllсков В. и., Козлов В. В., Шершнев В. Н.
лизованные
ватели
//
292
по
частоте
u
виброизмерителъные
Вибрационная техlПfка.
С.113-116.
21-25 апре­
-
др, Норма­
преобразо­
М.: мДНШ,
1975, -
Литература
131. Нориш Ю.
И. Сдвиговые пьезоэлектрические датчики
рационная техника. -М.: МДНТп,
132. Цеханскuй К.
пературы
на
встроенную
систему
М.: МДНТП.
-
// Виб­
52-57.
контроля
пьезоэлектричесЮ)го датчика вибрации
ника.
С.
1988. -
Р., Воuтенко В. Б., КудиНО6 А. П. Влияние тем­
133. Харитонов В.
1988. -
С.
исправности
Вибрационная тех­
/!
101-104.
с., Сидоренко В. Н, Коваленко В. А. Определе­
lШе осевой и поперечной чувствительности конструктивных
модулей пьезоэлектрических вибродатчиЮ)в
техника.
-
М.: МДНШ,
1988. -
С.
//
Вибрационная
94-97.
134.ДyHaeвcкuu В. П. Конструкции дифференциальных пьезо­
электрических акселерометров
М.: МДНТП,
135. Цexaнcкuй
1977. -
С.
Вибрационная теХlll1ка,
/!
-
37-43.
К. Р., Войтенко В. Б., Кудинов А. П. ВысоЮ)чув­
ствительные вибропрочные пьезоакселерометры
онная техника.
136. Цexaнcкuй
-
М.: МДНТП,
1981. -
С,
/!
Вибраци­
95-98.
К. Р. Прmщипы конструирования пьезоакселеро­
метров с реГУmIpуемыми параметрами
ника.-М.:МДНТП, 1976.-С.
137. Цеханскuй К.
J/
Вибрационная тех­
11-15.
Р., Войтенко В. Б., Вусевкер В. Ю. Многокомпо­
нентные датчики для измерения пространственной вибрации
атомного энергетичесЮ)го оборудования
/!
Актуальные про­
блемы пьезоэлектрического приборостроения и нанотехноло­
rnЙ.
-
Ростов нJД: ИЗД-ВО ЦВВР.
138. Нориш
Ю.
И.
Конструктивные
электрических вибродатчиков
М.: МДНТП,
139. Нориш Ю.
2006. -
1990. -
С.
/!
С.
схемы
78--84.
сдвиговых
пьезо­
Вибрационная техlШка.
7-11.
и., Лоскутов В. С., Лазаренко
ческий вибродатчик «Тендемшир))
-
r. п. Пьезоэлектри­
/! Всесоюзная науч.-техн.
Ю)нф, «Современное состояние и перспективы развития ме­
тодов и средств виброметрии и вибродиarnостики: тезисы
докладов.
140. Ба6ер
-
М.,
С.
1989. -
202-204.
И с., Кустарев А. С. Сдвиговые пьезоэлектрические
виброизмерителъные
М.: МДНТП,
1982. -
преобразователи
С.
J/
Виброметрия,
-
153-155.
293
ЛWIIEратура
141. Кuрnuчев А.
А., СмиРНО6 В. В., Яровuков В. И. Миниатюрные
однокомпонентные
ры типа АП
//
и
трехкомпонентные
Вибрационная техника.
С.25-27.
142. Донсков В. Н, Бинеев Р.
Вибрационная техника.
143. Кобяков И,
-
пьезоакселеромет­
М,; МДНТП,
1990,-
.v. Новая конструкция акселерометра //
-
М,; МДНТП,
1990. -
С.
11-14.
Сперанский А., Хориков А. и др. Знание векторных
характеристик вибрации
- ключ к безопасности технических
устройств JJ Двигатель. -2005,-){!! 2 (38). -С, 8-11,
144.Янчич В. В., Кустов В. Н Пьезоэлектрические виброизмери­
тельные преобразователи для контрольно-диагностических
систем энергетического оборудования
//
Труды Междунар.
науч.-практ. конф. «Фундаментальные проблемы пьезоэлект­
рического приборостроеШlЯ)} (Пъезотехника-99). Ростов нJД;
сКlЩ ВЩ 1999. - Т. 2. - с. 221-226.
145. Acoustic and vibration transducers. Reliability and precision based
оп superior technology, - Naerum, Denтark; Bn1el and Kjrer,
1996.
146.Янчич В. В., Иванов А .А., Костюков В .Н. Трехкомпонент­
ные пьезоэлектрические акселерометры для векторной вибро­
метрШI промышленных объектов
// Труды VI Международной
конф, «Инновационные процессы пьезоэлектрического при­
боростроения и нанотехнологиЙ}}.
- Ростов нJД, Анапа: Изд­
во Рост. педагогического ун-та, 2008, - С. 157-162.
147. Пат. N!! 47575 Украины, GOIP15J09. ПЬезоэлектрический
акселерометр / В. М. Шарапов, И, Сарвар, М. П. Мусиенко
и др. - Опубл. 15.07.2002. -Бюл. N,7.
148. Аранович З. Н, Кирнос Д П, Ток.маков В. А. и др. Основные
типы сейсмометрических приборов // Аппаратура и методика
сейсмометрических измереlПlЙ в СССР. - М.; Наука, 1974. С.59-{;0.
149.Андрианов В. А., Мазuн В. Д Измерение малых ускорений
пьезоэлектрическими преобразователями
//
Измерения, конт­
роль, автоматизация (ЦНИИТЭИ приборостроения).
Вып.
294
5 (21). -
с.
3-12.
-1979,-
Литература
150, Макеев
В. П Новая конструктивная схема построения пье­
зоэлектричесRИХ акселерометров // Вибрационная техmrка, М.: МДНТП, 1976. - с. 8-11.
151,Accelerometers & Conditioning. Product Cata1ogue. - Naerum,
Denmark: Briiel and Kjrer, 2009. -76 р.
152. PRODUCT DATA Miniature Triaxia1 Delta Tron® Accelerometers-Types 4506, 4506 В ... - Denmark: Brtiel and Kjrer, 1996.6р.
153, Новые универсальные Delta Iron акселерометры с JEDS //
Brtiel & Kjrer МAGAZINE/ Тhe International Sound and Vibration
Magazine from Brtiel & Kjrer. -2006. - Х2 1. -Р. 31.
154. PRODUCT DATAPiezoelectricAccelerometer, Miniature Triaxia1
Delta Tron® Accelerometers - Турев 4524, 4524 В. - Denmark:
Briiel & Kjrer, 2005. - 6 р.
155, Пат. Х2 2229136 РФ, GOIPI5109. Трехкомпонентный пьезо­
электричесRИЙ виброакселерометр с одним чувствительным
элементом
156, lWбяков
И. Б. Кобяков.
/
-
Опубл.
22.11.2002, -
Бюл. Х2
9.
И Б., Малютuн Д. В., Сперанский А. А. Векторная
виброметрия
2006. -N21.
-
технология
-с.
157, lWбяков И Б.
XXI
века
//
ДатчиRИ и системы.
тем вибрациоlПlOЙ диагностики технических систем
роль. Диагностика.
158, Измереmrе
-
2-11.
Трехкомпонентный виброакселерометр для сис­
- 2001. -
Х2
//
Конт­
10. -С, 17-18.
и анализ механических колебаний.
-
Нерум, Да­
ния: Брюль и Къер,
1991. -40 с,
5348-2002 Вибрация и удар. Механическое креп­
- Введ. 01.04.2008. - М,; Пзд-во стан­
дартов, 2007, -12 с.
160, Соmреndiшn of Vibration Ca1ibration. Ca1ibration of Vibration
Sensors, Vibrometers and Vibration Ca1ibrators / concept and
professional advice Ьу U. Buehn. - Dresden: SPEKTRA, 2007, 159, ГОСТ
ПСО
ление акселерометров.
Р.53-55.
161,Пeллullец В. С. Разработка аппаратуры для измерения импуль­
сных ускорений
Ч.
11. -
С.
JJ
Виброизмерения.
-
Л.; ЛДНТП,
1960. -
22-27.
295
ЛWIIEратура
162.Янчuч В. В., Иванов А. А., Ковалев С. Н
u
др. ПЬезоэлектри­
ческие акселерометры для высоких уровней вибрационного
и ударного ускорений: труды
VI
Международной науч.-техн.
IФнф, «Инновационные процессы пъезоэлектричесIФГО при­
боростроения и нанотехнологий».
- Ростов нJД: Изд-во Рост.
2008. - С. 162-165.
1027625 СССР, GOIPI5109. Пьезоэлектрический акселе­
рометр / В. И, ДОНСIФв, В. В, Янчич, В. В. Козлов и др. (ссср). -N2 3357107/18-10; заянп. 19.11.81; опубл. 07.07.83.roс. педагогичесIФГО ун-та,
163. А.
с,
Бюл,N!!25.
164. ПанuчА. Е.,Янчuч В. В., ИвановА. А,
и др. ПЬезоэлектрические
материалы и датчики для измерения параметров вибрации
//
Сб. трудов Международной науч.-практ, IФнф. «Актуальные
проблемы пьезоэлектричесIФГО приборостроения и нанотех­
нологий»,
-
Ростов нJД: Изд-во ЦВВР,
2006. -
С,
20-26,
165.Янчuч В. В., Иванов А. А., Ковалев С. Н и др. Пьезоэлектри­
ческие сейсмоприемники
J/
Труды
VI
Международной науч.­
техн. IФнф. «ИнноваЦИОШlые процессы пьезоэлектрического
пр.иборостроения и нанотехнологий)),
Рост. гос. педагогичесIФГО ун-та,
166. Лоскутов В.
с.,
TO.MWIUJI Я. И,
- Ростов н/Д:
2008. - С, 166-171.
Изд-во
Кuшен/(ова Н А. Технологичес­
кие процессы производства пьезоэлектрических вибродатчи­
ков для экстремальных условий
М.: МДIПП,
J/
Вибрационная техника.
-
1988. -с. 72-76.
167.Донсков В. И, ЯнчuчВ. В., Дуднаков В. Ю.
u др.
Пъезоэлектри­
ческие виброизмерителъные преобразователи с изгибными эле­
ментами //Пъезоэлектрические материалы и преобразователи.­
Вып. 4. -Ростов нJД: Изд-во Рост. ун-та" 1977. - С, 105-109.
168. Миниатюрные акселерометры для модельных испытаний тон­
IФстенных IФнструкций /! Briiel & Kjrer MAGAZINE. Меж­
дународные новости о звуке и вибрации от фирмы «Брюль
и Къер)), -1998. -N!! 1, - С, 13.
169. Аппаратура для виброметрии J/ Краткий каталог 1989/90 фир­
мы «Брюль и Къер)), Аппаратура для акустики, электроакусти­
ки, виброметрии, фотометрии, исследований тепловых усло-
296
Литература
вий И газов, анализа сигналов и медицинской диагностики,
Нерум, Дamrя,
170, Терещук
1990. -
с.
-
22-40.
К. М Контроль работоспособности виброизмери­
тельной аппаратуры
// Вибрационная техника. -
М.: МДНТп,
1977. -с. 53-57.
171,Янчuч В. В., ИвановА. А., Орехов В, С. и др. Способы проверки
и калибровки пьезоэлектрических акселерометров с изгибны­
ми элементами
// Труды VI Международной
науч,-техн. конф.
((Инновационные процессы пьезоэлектрического приборос­
троения и нанотехнологиЙ».
педагогического ун-та,
172, Фремд
2008. -
Ростов нJД: Изд-во Рост. гос,
С,
176-179.
В. М Широкополосный трехкомпонентный акселеро­
метр для сейсмического мониторинга горных пород
ционная техника.
173. Пuявченко
-
М.: МДНТП,
1990. -
С.
// Вибра­
28-31,
О. Н, Панич А. Е. Перспективные интеллектуаль­
ные датчики
//
Сб, трудов Международной науч,-практ, конф,
(~альные проблемы пьезоэлектрического приборострое­
ния и нанотехнологий)).
-
Ростов нJД: Изд-во ЦВВР,
2006, -
С.50-56.
174.Янчич В, В., Синютuн С. А., Иванов А. А. и др. Пьезоэлект­
рические интеллектуальные датчики вибрации
//
Сб. трудов
Международной науч,-практ, конф. «Актуальные проблемы
пьезоэлектрического приборостроения и нанотехнологию),
Ростов нJД: Изд-во ЦВВР, 2006. - с. 75-77.
175.Pat. 3104335 US, G01p 15/08. Acce1erometer / G. J. Ames.РиЫ.20.02.1968.
176. Субботин М Н
Пакетный пьезоэлектрический акселерометр
ВибрацИОШIаятехника,-Сб,
177, А.
с.
526830
СССР,
1. -М.:
GOIPI5108.
МДНтп,1971,-С,
//
8-10,
Пьезоэлектрический преобра­
зователь ускорения
/ В. В, Козлов, В. В. Янчич, В. И, Дон­
СКОВ И др. - (СССР). - N, 209611/10; заявл. 31.12.74; опубл.
30.08.76. -Бюл. N, 32.
178. Санин
Е, Н, Козлов В. В., Янчuч В. В. и др. Улучшение ха­
рактеристик пакетного пьезоэлектричесЮ)го акселерометра
Виброметрия.
-
М.: МДНТП,
1979. -
с.
//
52-56.
297
ЛWIIEратура
179. ЯllЧUЧ
В. В., Кравцов Б. А., Кра.маров О. П. МОНОШIтные
пьезоэлектрические акселерометры / / Приборы и системы
управления. -1974. - Х!! 10. - С, 42--43.
180. Pat. 3805097 US, GOIP 15108. Piezoelectric accelerometer /
V. V. Yanchich, О, р, Кramarov, V. V. Zalessky et аl, - РиЫ.
16.04.1974.
181, А. с, 369827 ссср, GOIPI5108. Пьезоэлектрический аксе­
лерометр / В. В. Янчич, О, П, Крамаров, В, В. Залесский
и др. - (СССР). - N, 1422010/18-10; заявл. 04.01.1971; опубл.
09.10.78. - Бюл. N, 34.
182,А. с. 361723 СССР, ООIР151О8, Пьезоэлектрический акселе­
рометр J О, П, Крамаров, В, В, Янчич, Ю. М, Мартынен:ко
и др. - (СССР). - N, 1600358/18-10; заявл. 04.01.1971; опубл.
09.06.78. - Бюл. N, 29.
183. А. с, 472587 СССР, ООIР151О8. Пъезоэлектрический акселеро­
метр / В. В. Янчич, о. п. Крамаров. -(СССР). - N, 179627/1&-10; заявл. 12.06.72; опубл. 09.10.78. -Бюл. N, 34.
184.ЯllЧUЧ В. В.,
о. п., ДОllсков В. И ПЬезоэлектриче­
Kp(LUapoB
ские преобразоватеmI на базе монолитных блоков
//
ческие методы и средства исследования океана.
Владивос­
ток.: ДВПИ,
1974. -
ч.
2. -
С.
-
Акусти­
42-43.
185,ДОllсковВ. И, ЯllЧUЧВ, В., Козлов В. В.
u др. Конструкции пье­
J/
зоэлектрических акселерометров с монолитными модулями
Вибрационная техника.
1976. - С. 3-7,
472588 СССР, ООIР151О8. Пъезоэлектрический акселеро­
метр / Янчич В.Б., Крамаров о. п. - (СССР). - N, 1796270/1&-10; заявл. 12.06.72; опубл. 09.10.78. -Бюл. N, 34.
187, А. с, 922641 СССР, ООIР151О9. Пъезоэлектрический акселеро­
метр / В. П. Дунаевский, А. Н, Вуколов, В. П. Сумский И др.­
(СССР). -N, 2920380/18-10; заявл. 05.05.80; опубл. 23.04.82.Бюл. N!! 15,
188. А. с. 758858 СССР, GOIPI5108. Пъезоэлектрический акселеро­
метр / В. П. Дунаевский, А. Н. Вуколов, В. И. Донсков И др. (СССР). -N, 2532376/18-10; заявл. 10.10.77; опубл. 05.08.80.Бюл. N!!28.
186, А.
298
с,
-
М.: МДНТП,
Литература
189. Грuбовский П. О. Керамические твердые схемы. - М.: Энер­
rnя, 1971. - 448 с.
190. Никулин Н В., Корmнев В. В. Оборудовamrя и технология про­
изводства электротехнических IФнструкций, - М.: Энергия. 416 с.
191, Янчич В. В. Пъезоэлектрические акселерометры на основе мо­
нолитного блока с деформацией изгиба // Зарубежная радио­
электроника. -1996, -Х2 9. Успехи современной радиоэлект­
роники. Космическая радиофизика. - Вып. 2. - С. 63-64.
192. Янчич В. В., Санин Е. И Инженерный расчет монолитных пье­
зоэлектрических виброизмерителъных преобразователей //
Пъезоэлектрические материалы и преобразователи, - Ростов
нJД: Изд-во Рост. ун-та, 1985. -с. 52-59.
193, Акопов О. Н, Белоконъ А. В., Ере.;иеев В. А. и др. Об опыте
разработки IФнечно-элементного пакета ACELAN для расче­
та пьезоэлектрических устройств // Труды Международной
науч.-практ, IФнф. ((Фундаментальные проблемы пьезоэлек­
трического приборостроеНlliШ (Пъезотехника-99).
нJД: СКlЩВЩ
194. Богуш М.
-
Ростов
1999. -Т. 2. -с. 241-251.
В., Гориш А. В. Исследование технических характе­
ристик пьезоэлектрических датчиIФВ методом конечных эле­
ментов
// Информационная техника, ЭIФлогия и мониторинг:
- Вып. 6. - М.: РКА, МГУЛ, 2003. - С. 229-242.
науч. тр.
195. Богуш
М В. Проектирование пьезоэлектрических датчиков
с использованием IФнечно-элементных математических моде­
лей// Приборы.
196. Миmъко
-2007. -и, 12. -
с.
30-38.
В. Н, КРlLИаров Ю. А., Лани"Ч А. А. МатематичеСIФе
модemrpование физических процессов в пьезоэлектрическом
приборостроении. -Ростов н/Д: Изд-во ЮФУ,
(Пьезоэлектрическое приборостроение.
197, Боднер В. А.,
-
Т.
2009, - 240
6).
С,­
Засmрогuн Ю. Ф., 1Wролев А. М и др. Измерение
вибрацlШ лазерными интерферометрами // Вибрационная тех­
ника.-М.: МДНТП, 1976. -с. 70-31.
198. Licht Т. R., Andersen Н Trends in Accelerometer Calibration //
Technical Review, - 1987. - Х.2 2. Р.23--42.
299
ЛWIIEратура
199. Клюкuни.
и., Колесников А. Е. Акустические измереlШЯ в су­
достроении. - 3-е изд' - Л.: Судостроение, 1982. - С, 22-37.
200. Абра,иов О. К. Устройство для калибровки акселерометров в поле
земного тяroтеIШЯ // ВестникРГРТУ. - 2008. - Вып. 26. -N!! 4.
201. C-UUPHOB В. Я. Поверка пьезоэлектрических вибропреобра­
зователей в месте эксплуатации // Мир измереlПfЙ. - 2007, Вып. 26. - N, 7, - с. 39-42.
202. Доля В. К. Оперативная поверка пьезоэлектрических измери­
тельных преобразователей /! Тезисы докладов Всесоюзной
науч.-техн. конф «Современное СОСТОЯlПfе и перспективы раз­
вития методов и средств виброметрии и вибродиагнОСТИКlD),­
М.: ВИТОП им. С, И. Вавилова,
203. Лyкnшuн
Ю. В.,
1989. -
Терещук К. М.,
С,
138.
Скоков А. М
Оператив­
ная проверка работоспособности и калибровка тракта виб­
роизмерительной аппаратуры
М.: МДНТП,
204.
1975. -
с.
/!
185-189.
ВибрациоШIая техника.
-
C-UUPHOB В. Я. Об особеШIОСТЯХ поверки вибропреобразовате­
лей в месте эксплуатации
J/ Материалы Всероссийской науч.­
21-25 апреля
техн. конф. «Механометрика-2008)), Суздаль,
2008
г,
-
М.: Метрологическая ассоциация промышленников
и предпршшмателей, 2008. - С. 172-174.
205. Вибрации в технике: справОЧlПfк.В 6т. Jпод общ,ред. В.Н. Че­
ломея. -М.: Машиностроение, 1981. - Т. 4. - С, 269-277.
206. Чистяков В. А. Электродинамический вибровозбудитель для
инфранизкочастотных вибростендов /! Вибрационная техни­
Юl.-М.:МДНТП, 1986.-С. 117-119.
207. Васильев К. И. Электродинамические вибровозбудители
с аэростатическим подвесом // Вибрационная техlПfка, - М,:
МДНТП, 1988. - с. 7-10.
208. Степанов В. И. Измерение колебаний вибрационных испы­
тательных стендов J/ Вибрационная техника. - М,: МДНШ,
1973. -с. 31-34.
209. Янчuч В. В., ИвановА. А., Ковалев С. Н Вибраторы с пьезоэлек­
трическим возбуждеlПfем для испытания датчиков вибрации //
Сб. трудов Международной науч.-практ, конф. «Актуальные
300
Литература
проблемы пьезоэлектрического приборостроения и нанотех­
нологий». -Ростов н/Д: Изд-во ЦВВР,
210,
2006. -
С,
141-143,
Токаев С. С., Воробьев В. С., Немов А. Ю. Датчики механичес­
ких величин для мониторинга и диагностики состояния тур­
боагрегатов тепловых и ато:мных электростанций разработ­
ки нпп ((ВиКонт»
//
Материалы Всероссийской науч.-техн.
конф. (<Механометрика-2008», Суздаль,
21-25 апреля 2008 г.­
М.: Метрологическая ассоциация промышленников и пред­
принимателей,
211,
2008, -
С,
179-182.
Сunюmun С. А., Орехов В. С. Компьютеризированная систе­
ма для контроля виброизмерителъных датчиков
//
Сб. трудов
Международной науч.-пракг. конф. ((А,ктуальные проблемы
пьезоэлектрического приборостроения и нанотехнологий»,
Ростов нJД: Изд-во ЦВВР,
2006. -
С.
-
143-145.
212.ЯnЧUЧВ. В., ИвановА. А., Ковалев С. Н и др. Малогабаритный
поверочный вибростенд
//
Труды
VI
Международной науч,­
техн. конф. «ИнновацИOlшые процессы пьезоэлектрического
приборостроения и нанотехнологий»,
- Ростов н/Д: Изд-во
Рост. гос. педагогического ун-та, 2008. - С, 179-182.
213, ГОСТ ИСО 5347-1-96, Вибрация. Калибровка датчиков вибра­
ции и удара. - Ч. 1, Первичная вибрациOlШая калибровка ме­
тодами лазерной интерферометрии. - Введ. 01.07.1997, - М.:
Изд-востандартов,1997,-20с,
214. ГОСТ 30652-99
(ИСО
5347-3-93). Вибрация. Калибровка дат­
- Ч. 3. Первичная вибрационная .ка­
- Введ. 01,07.1997, - М.: Изд-во
чиков вибрации и удара,
либровка методом сличения.
стандартов, 1999. - 8 с,
215, Sil1R. D. Mass Loading inBack-То-ВасkRеfеrеnсеАссеlеrоmе­
ters, Technical paper ТР 310, Endevco.
216. МИ 1873-88. Виброметры с пьезоэлектрическими и индук­
ционными преобразователями. Методика поверки, - Введ.
01.07.1990. -М.: Изд-во стандартов, 1990. - 20 с,
217,Цеханскuй К. Р К вопросу определения КОЭффlЩиента попе­
речного преобразовamIЯ акселерометров
//
Виброметрия.
-
М.: мДНШ, 1973.-С.174-179.
ЗОl
ЛWIIEратура
218. ТИповая
программа государствеlПlЫХ приемочных испыта­
ний виброизмерительных преобразователей (вибродатчиков)
ТПр 147-92. - М.: ВНlП!МС, 1992. -100 с.
219.ISO 5347-13: 1993. Methods for the calibration ofvibration and
shock pick-ups, - Р, 13, Testing ofbasestrain sensitivity. - Geneva, Switzerland: Internationa1 Organization for Standartization,
1993. - 8 р.
220. А. с. 547697 СССР, GOIPI5108. Устройство для измереlШЯКОЭф­
фициента ВЛИЯIШЯ деформации объекта на виброизмеритель­
ный преобразователь
марев.
25.02.77.
221, Козлов
/ В. В, Козлов, В, В, Янчич, А. М, Ли­
- N, 2184577/1010; заявл. 20.10.75; опубл.
N, 7.
(СССР).
-Бюл.
В. В., Яnчuч В. В., Лu.марев А. М. Стенд для измере­
ния деформациоlПlОЙ чувствительности виброизмерительных
преобразователей
// Вибрационная техника, - М,; МДНТП,
1977. - С. 76-79.
222. ГОСТ Р 50648-94 (2004). Совместимость технических средств
электромагнитная. Устойчивость к магнитному полю про­
мышленной частоты. Технические требования и методы ис­
пытаний. (МЭК 1000-4-8-93).
223, KaмиncкuuM. А., ЛеоnтьевВ. И Маятниковыйударныйстенд//
ВибрациоlПlая техника. -М.: МДНШ, 1987. - С, 19-21.
224. Приборы и системы для измереlШЯ вибрации, шума и удара:
справочник. В 2 кн. / под ред. В. В. Клюева, - М.: Мanшно­
строение, 1978. -Кн. 2, - 439 с.
225. Краuненко Б. И, Лимарев А. М, ДОНCI<.ов В. И и др. Резонанс­
ные вибрационные установки типа РВУ 11 ВибрациоlПlая тех­
ника. -М.: МДНТП,1990. -С. 145-148.
226. Мокров Е, А. Метод построения датчиков акустического дав­
ления для ракетно-космической техники // Надежность и Ка­
чество 2001; труды Междунар. симпозиум:а, - Пенза, 2001,С.152-157.
227, Богуш М В., Мокров Е. А.,
Паnuч А, Е. Оценка информативнос­
ти пьезоэлектрических датчиков давления российских и зару­
бежных производителей 11 Приборы,
302
- 2008. -
Х!!
3. -
С.
13-16.
Литература
228. Белицкий
r. М. Критерий качества акселерометра // Вибраци­
онная техника.
229. Новицкий П
230. Новицкий П
-
М.: МДНТП,
1975. -
С,
201-202,
В. Основы информационной теорШI измеритель­
ных устройств.
-
Л.: Энергия,
1968. - 248
с.
В., Зегжда П Д Система основных понятий при
анализе качества измерительных средств
//
техника. -1971. - N!! 6. - С, 18-19.
231. Зегжда П д, Новицкий П В. Количественная
Измерительная
оценка качества
как научная основа технической политики в приборостроенШI //
Приборы и системы управления.
232. Король
-1972. -N!! 2. -
С,
31-33,
Е. И, Новицкий П В., ПLwаков Э. М Оценка качества
датчиков I/ТрудыЛIrn: ИМ. М. И. Калишша.
N2342.-C.17-19.
233. П1маков Э. М., Зегжда
-
Л,; ШI,
1975,-
П д, Сwолко л В. Оценка техниче­
ской эффективности акселерометров
ка.-М.:МДНТП, 1978.-С.
//
Вибрационная техни­
176-179.
234.ДyHaeвcкuu В. П, Субботин М. И, Юрьева Л А. и др. Опти­
мальныенаправлеНИЯКОНСТРУИРОВamIЯпьезоакселерометров//
Вибрационная техника. -М.: МДНТП. 1978, - С, 179-184.
235. Коган
С. Л Оценка помехоустойчивости низкочастотного пье­
зоприемника с согласующим усилителем
ские материалы и преобразователи.
236.
ческом приборостроении.
180 с, -
237.
-
//
ПЬезоэлектриче­
Ростов Н/Д: Изд-во Рост.
ун-та, 1985. - с. 70-76.
Зе.мл.яков В. Л Методы и средства измерений в пьезоэлектри­
-
Ростов н/Д: Изд-во ЮФV.
(Пъезоэлектрическое приборостроение. Т.
2009, -
5).
Тополов В. Ю., Турик А. В. Пористые пьезокомпозиты с экс­
тремально высокими параметрами приема // ЖТФ. - 2001, Т. 71. -Вып. 9. - с. 26-32.
238. Кага н., Ramesh R., Stevens R. et аl. Porous PZT ceramics for
receiving transducers // IEEE Trans. Ultrason. Ferroelec .• а. Freq.
Contr. - 2003. - V. 50. - N2 3. - Р. 28~296.
239. Panich А. Е., Topolov V. Уи., Gluschanin S. V. Нigh-perfonnance
1 - 3- Туре Relaxor-Ferroelectric-Based Composites // Proceedings
oftheIntemationa1 Conference VIВROENGINEER1NG. - Кaunas:
Lithuanian Асадеmу of Sciences, 2006. - Р. 28-32.
ЗОЗ
Научное издание
Янчич Владимир Владимирович
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ
ВИБРОИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
(АКСЕЛЕРОМЕТРЫ)
Редактор
Ж В. МШn8eE6l1
Кoppeкrop
Л. с. Шymько
компыQерная верстка
О. В. НllСКWЮВU
Дизайнер обложки
А. В. Кuреев
Иллюстрации
В. В. Я1/ЧUЧ
Сдано в мбор
Формar
22.11.2010. Подписано в печать 16.12.2010.
60x&4 1/,.. Бумага офсетная. Гарнитура Times.
12,05.
Тири:ж 65 жэ. З!Ша.З K~ 1458.
Печатьофсетиая. УСЛ. печ.л.17,67. Уч.-изд. л.
Издarельство ЮЖНОГО федерального университета
Отпечатано в типографии ЮФУ.
344090, г.
POcТOВ-M-дnНY, пр. Crачки,
Тел. (86З)
247-80-51.
20011.