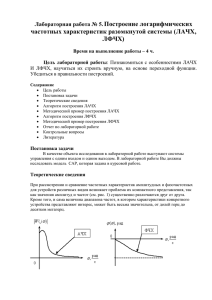
Задание на контрольную
advertisement

Задание на курсовую работу №1 по дисциплине
«Основы теории управления»
Рассчитать параметры системы автоматического управления (САУ),
осуществляющей автоматическое слежение за объектом перемещающимся в
пространстве и излучающим электромагнитные волны.
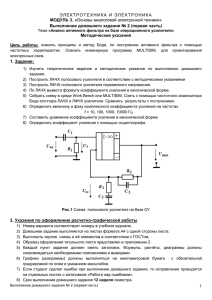
Структурная схема САУ представлена на рисунке 1, где:
- РПУ - радиоприёмное устройство,
- УР – угловой различитель,
- КЗ – корректирующее устройство,
- УМ – усилитель мощности,
- ЭД – электродвигатель,
- А – антенна с узкой диаграммой направленности,
- МОС – местная обратная связь,
- X=φц – азимут цели (объекта),
- Y=φа – азимут направления главного лепестка диаграммы направленности
антенны,
- е=x-y – ошибка слежения.
Рис.1 Структурная схема САУ
1) Необходимо определить тип и параметры корректирующего звена
(КЗ) и местной обратной связи (МОС), обеспечивающих качественные показатели САУ, численные значения которых определяются предпоследней N1 и
последней N0 цифрами зачетной книжки.
Исходные данные:
1) Полоса пропускания:
wn=75+0.6·N1 -1.2·N0 (c-1)
2) Показатель колебательности системы:
Wз(wр)= M=1.35+0.03·N1 при N0 – четной,
Wз(wр)= M=1.38+0.02·N1 при N0 – нечетной
3) Допустимые ошибки слежения:
а) по положению: e0=0
б) по скорости: e1=0.15°+0.01°·N1 - 0.01°·N0
в) по ускорению: e2=0.6°+0.01°·N1 - 0.01°·N0
при следующих значениях 1-й и 2-й производных изменения азимута объекта
во времени:
d ц
dt
10 °/с,
d 2 ц
dt 2
20 °/с2, где
d ц
dt
- скорость отклонения объекта,
d 2 ц
dt 2
-
ускорение отклонения объекта;
4) Параметры исходной части:
kРПУ
k
WРПУ
; WУМ УМ ;
1 pTРПУ
1 pTУМ
kЭДА
WЭДА
p (1 pTЭДА)
kРПУ k ур 5 103 В
kУМ 100
kЭДА 8 1
В с
TРПУ TФД TУМ 5 103с
W ур
k ур
;
1 pTур
Т ЭДА 12 мс 0.2 мс N1 0.2 мс N 0
kТГ 20 мкВ с (тахогенератор понадобится при разработке схемы МОС)
2) После расчёта параметров КЗ и МОС необходимо составить их функциональные схемы с указанием значений C , R и kус (сопротивлений, емкостей и коэффициентов усиления), а также проверить запас устойчивости системы по фазе, усилению и определить фактический показатель колебательности САУ Мф.
Методические указания по выполнению
задания №1 курсовой работы
1. Передаточная функция исходной части разомкнутой САУ без учёта КЗ
и МОС равна:
WРИ WРПУ WУР WУМ WЭДА
Т.к. в передаточную функцию WРИ входит четыре инерционных звена
первого порядка и интегратор (интегратор входит в передаточную функцию
WЭДА, т.к. выходным параметром электродвигателя является угол поворота
антенны), а гарантированно устойчивой является система только с двумя
инерционными звеньями, поэтому для обеспечения качественных показателей САУ понадобится включить как минимум два корректирующих звена.
Для упрощения расчётов возьмём два корректирующих звена с одинаковыми
параметрами. Общая передаточная функция последовательно соединенных
корректирующих звеньев имеет вид:
Wкз Wкз1 Wкз 2
1 pT2
kкз
1 pT1
2
(1)
Неизвестны параметры корректирующих звеньев: kкз , T1 , T2 . После их
нахождения расчет КЗ можно считать завершенным.
Общая передаточная функция разомкнутой системы равна:
2
di p i
k
1 pT2
k
i 0
p 1 pTРПУ 3 1 pT1 2 1 pTЭДА p 6
i
bp
2
WР WРИ WКЗ
i 0
i
,
(2)
k
1 2 p T2 p 2 T22
2
p 1 p (TЭДА 3TРПУ 2T1 ) p 2 (3TРПУ TЭДА 3TРПУ
4T1 TРПУ T12 )
где k k РПУ kУР kУМ kЭДА k КЗ
(3)
Коэффициенты ошибок по положению, скорости и ускорению по
определению равны:
С0
e0
ц
;
С1
е1
;
pц
С2
2 е2
, где р – символ дифференцироваp 2 ц
ния.
Т.к. в состав системы входит один интегратор, то порядок астатизма системы ν =1.
1
k
Для ν =1 имеем: С0 0, С1 , C2 2(
b1 d1 1
2).
k
k
Из выражения для С1 определим требуемый коэффициент усиления си1
стемы Ê , после чего из выражения (3) можно найти k КЗ :
Ñ1
kкз
k
k РПУ kУР kУМ kЭДА
Если k КЗ 1 , то в состав КЗ надо ввести неинвертирующий усилитель,
если kКЗ 1, то в состав КЗ надо ввести резистивный делитель (ослабитель).
Из выражения для С2 выразим разность b1 d1 T0 , где b1 и d1 коэффициенты при р1 в выражении (2).
T0 b1 d1
kC2 1
2
k
(4)
Коэффициенты b1 и d1 находятся из выражения (3):
b1 2 T1 TРПУ TУР TУМ TЭДА , d1 2 T2 . Подставим все известные значения
в формулу (4) и выразим искомые Т1 и Т2:
T1 T2 0,5 T0 3 TРПУ TЭДА Т 01 . Здесь учтено равенство: TÐÏ Ó TÓÐ TÓÌ
Если Т1 Т 2 0, то требуется корректирующее звено с отставанием по
фазе.
По условию задачи задана полоса пропускания системы Ï , поэтому
надо найти второе соотношение между Т1 и Т 2 из ЛАЧХ разомкнутой САУ,
т.к. Ï зависит от Т1 и Т2
Вначале определим частоту среза ср
Если ср с
n
2 cos( )
, где arcsin
1
.
M
1
( с – частота сопряжения самого инерционного
TЭДА
звена – электродвигателя, нагруженного антенной), то до частоты среза
ЛАЧХ разомкнутой системы определяется только интегратором и двумя КЗ.
Построим ЛАЧХ разомкнутой системы. Т.к. в состав системы включены
2 корректирующих звена с отставанием по фазе, то, кроме частоты среза,
требуется отметить по оси абсцисс частоты сопряжения корректирующих
звеньев:
1
1
1
; 2
T1
T2
1 2
ЛАЧХ интегратора, входящего в состав системы, представляет собой
прямую с наклоном -20 дБ/дек на всей частотной
области, одно корректирующее звено имеет наклон -20 дБ/дек на участке (ω1, ω2) ,при двух КЗ с
одинаковыми параметрами их ЛАЧХ суммируются (наклон - 40 дБ/дек). Результатирующая ЛАЧХ получается геометрическим сложением всех ЛАЧХ
устройств, входящих в САУ. На участке (ω1, ω2) наклон ЛАЧХ получается 60 дБ/дек.
Рис.2 ЛАЧХ разомкнутой системы автоматического управления
До частоты w1 ЛАЧХ системы определяется только интегратором:
1) p 1 20 lg
k
1
На участке 1 , 2 :
2) p 1 p 2 60(lg 2 lg 1 ) 60 lg
На участке ( 2 ; ср )
3) p ( 2 ) p ( cp ) 20 lg
2
1
cp
,
2
т.к. p (cp ) =0, то после подстановки первого и третьего выражения во второе
получим:
20 lg
k
1
20 lg
cp
60 lg 2 / 20
2
1
k
lg 2 3 lg 1
2
1 cp
2
2
cp 1
1
1
1 ; 2
T1
T2
k
T1
k
k
=> T1 T2
T2
cp
cp
Для нахождения Т1 и Т2 решим систему уравнений:
Т 1 Т 2 0.5(Т 0 3Т РПУ Т ЭДА )
к
Т
Т
1
2
ср
2. Первое корректирующее звено включим после УР. В его состав вклю-
чим усилитель с коэффициентом kкз . Схема корректирующего звена имеет
вид:
Рис.3 Схема корректирующего звена
Необходимо определить параметры схемы:
Коэффициент передачи усилителя: k кз 1
RОС
R
Зададимся R=1000 Ом, тогда
RОС R k КЗ 1 ,
Зададим С=10 мкФ и, решая систему уравнений (5), получим R1 и R2:
T2 R2 C
T1 R1 R2 C
(5)
Второе КЗ реализуем по схеме включения через местную обратную
связь (МОС), охватывающую звенья системы с нестабильными параметрами:
УС, ЭД и А. Такое включение повышает стабильность параметров охваченных обратной связью звеньев. Передаточная функция МОС определяется по
формуле:
1
1 , где
WКЗ 2
kУМ k ЭДА
W0
1
W2
W2
p 1 pTУМ 1 pTЭДА
- передаточная функция звеньев, охваченных
ОС,
1 pT2
- передаточная функция второго КЗ без усилителя.
1 pT1
1
Если ср СЭДА
, то до ср передаточную функцию W2 можно
TЭДА
WКЗ 2
определить по приближенной формуле W2
kУМ k ЭДА
p
.
Тогда W0
p
kУм k ЭДА
1 pT1
k p2
T T
, где k 0 1 2
1 0
kУМ k ЭДА
1 pT2
1 pT2
Передаточную функцию W0 реализуем последовательным соединением
тахогенератора, дифференцирующей цепи с постоянной времени T2 и усилителя с коэффициентом усиления kУС.
Передаточная функция МОС имеет вид:
k0 p 2
pT2
(6)
W0
kТГ p
kУС
1 pT2 1 pT2
WУС
WТГ
WДЦ
Схема дифференцирующей цепи имеет вид:
Рис.4 Схема дифференцирующей цепи
Из выражения (6) определим kУС:
kУС
k0
T2 kТГ
Общая функциональная схема местной обратной связи имеет вид:
Рис.5 Общая функциональная схема МОС
Зададимся R´=1000 Ом и из формулы kУС 1
/
RОС
определим Rос.´.
R/
T2 C2 R2
Фактические запасы устойчивости определяются по точным ЛАЧХ и
ЛФЧХ графо-аналитическим методом по следующим формулам:
ЛАЧХ:
p 20 lg k 20 lg 20 lg 1 T2 20 lg 1 T1 30 lg 1 TРПУ
2
интегратор
2
РПУ ,ФД ,УМ
10 lg 1 TЭДА
2
2
ЭД
ЛФЧХ:
p
2arctg T2 2arctg T1 3arctg TРПУ arctg TЭДА
2
КЗ
интегратор
РПУ ,ФД ,УМ
ЭД
Пример выполнения расчета и построения ЛАЧХ и ЛФЧХ в среде MathCad:
0 300
T2 5.41
2
3
T1 6.519
Trpu 5 10
3
Tda 11.6 10
2 atan T2 2 atan T1 3 atan Trpu atan Tda
K 76.923
2 20 log 1 T12 30 log 1 Trpu2 10 log 1 Td
20 log ( K) 20 log 20 log 1 T2
На рисунке 6 представлены графики ЛАЧХ и ЛФЧХ разомкнутой системы.
Рис.6 График ЛАЧХ и ЛФЧХ разомкнутой САУ
В процессе эксплуатации системы РА ее параметры (коэффициенты усиления, постоянные времени) из-за изменения внешних условий, колебаний
напряжений источников энергии и других причин отличаются от расчетных
значений. Если не принять определенных мер, то система РА может стать неустойчивой. Для исключения этого явления при проектировании следует
обеспечить определенные запасы устойчивости системы. Запасы устойчивости определяются на двух частотах: частоте среза ωср и на критической частоте ωкр. На частоте среза ЛАЧХ разомкнутой системы равна нулю, на критической частоте ЛФЧХ принимает значение, равное –π, т.е.:
р (ср ) 0
р ( кр )
На рис.6 А и В – вспомогательные прямые для определения частоты среза ωср и критической частоты ωкр, равные 0 и –π соответственно.
Различают запас устойчивости по фазе и усилению. Запас устойчивости
по фазе показывает, на какое значение ЛФЧХ разомкнутой системы на частоте среза отличается от –π:
ð (ñð ) .
Запас устойчивости по усилению определяет, во сколько раз нужно увеличить коэффициент усиления, чтобы система оказалась на границе устойчивости. Запас устойчивости по усилению определяется по формуле:
дБ р ( кр ) .
Для устойчивости системы в целом необходимо и достаточно, чтобы
выполнялось условие:
ср кр
Если ср кр , то система находится на границе устойчивости.
Согласно графикам ЛАЧХ и ЛФЧХ определили, что ñð меньше êð ,
что свидетельствует об устойчивости системы.
Фактический показатель колебательности Мф связан с запасом устойчивости по фазе выражением:
MФ
1
,
sin
M Ф - это значение АЧХ замкнутой системы на резонансной частоте.
3. Для перехода к цифровым прототипам КЗ и МОС воспользуемся фор-
мулой билинейного Z - преобразования
W ( z ) W ( p) |
p
2 1 z 1
TÄ 1 z 1
Построим цифровую реализацию корректирующего звена, передаточная
функция которого имеет вид:
WКЗ k КЗ
1 pT2
1 pT1
Найдем TД – период дискретизации:
TД
1
, где FД – частота дискретизации
FД
По теореме Котельникова-Найквиста:
FД>2Fmax Fmax=(1.5÷2)Fn ,где
Fn
n
, п - полоса пропускания замкнутой системы.
2
После подстановки в Wкз вместо р выражение
2 1 z 1
TÄ 1 z 1
получим
2
1
TД
W z k КЗ
2
1
TД
1 z 1
T2
1 z 1
1 z 1
T1
1 z 1
Умножим числитель и знаменатель на 1 z 1 , получим:
2T
1 z 1 2 (1 z 1 )
TД
W z k КЗ
2T
1 z 1 1 (1 z 1 )
TД
Обозначим
2T2
b1 ,
TД
W ( z ) k кз
2T1
а1 . Тогда выражение будет иметь вид:
TД
1 z 1 b1 (1 z 1 )
1 z 1 b1 b1 z 1
(1 b1 ) (1 b1 ) z 1
k
k
кз
кз
1 z 1 a1 (1 z 1 )
1 z 1 a1 a1 z 1
(1 a1 ) (1 a1 ) z 1
Чтобы получить A0 1, поделим числитель и знаменатель дроби на (1 a1 ) , и
получим:
1 b1 1 b1 1
z
Â0 Â1 z 1
1 a1 1 a1
W ( z ) kêç
Ê êç
,
1
1 a1 1
1
A
z
1
1
z
1 a1
1 b1
1 b1
1 a1
где B0
, B1
, A1
..
1 a1
1 a1
1 a1
, где
Выражению W ( z ) соответствует следующая схема рекурсивного цифрового звена первого порядка:
Рис.7 Схема цифрового прототипа КЗ
Далее аналогично построим цифровой прототип для МОС. Период дискретизации оставим тем же.
Передаточная функция МОС имеет вид:
WМОС ( р)
к0 р 2
1 р Т2
Вывод формулы системной функции и коэффициентов системной
функции для МОС выполнить самостоятельно.
Схема цифрового прототипа МОС имеет вид:
Рис.8 Схема цифрового прототипа МОС
Задание на курсовую работу №2
Разработать алгоритм и программу управления для токарного станка с
ЧПУ при изготовлении шахматных фигур. Исходные данные определяются
по последней N 0 и предпоследней N 1 цифре зачетной книжки:
№
Высота
Фигура
N 1- четн.
N0
0 ;1 Пешка
50
2;3 Ладья
60
4;5 Слон
70
6;7 Ферзь
80
8;9 Король
90
Диаметр
N 1- неч.
N 1- четн.
N 1- неч.
40
50
60
70
80
20
25
25
30
30
18
20
20
25
25
Заготовка цилиндрической формы из дерева липы длиной 1400мм,
диаметром 32 мм.
Методические указания для выполнения задания №2
1. Структурная схема токарного станка с ЧПУ и назначение блоков
На рисунке 1 приведена структурная схема токарного станка с ЧПУ
Рисунок 1 Структурная схема токарного станка с ЧПУ
На платформе 1 (Пл. 1) укреплены резцы Р1, Р2, Р3. Она может перемещаться в пространстве с заданной скоростью и поворачиваться вокруг оси по
часовой и против часовой стрелки на заданный угол. Платформы 2 и 3 служат для зажима заготовки с торцов и могут перемещаться влево и вправо
вдоль оси х от патрона до стопоров 2 и 3 соответственно. Патрон может зажимать и разжимать заготовку и вращать её вокруг оси x по часовой и против
часовой стрелки с заданной угловой скоростью. Платформы и патрон приводятся в движение исполнительными механизмами, состоящими из электродвигателей с редукторами в виде шестерёнчатых или червячных передач.
Шестерёнчатые передачи позволяют изменять скорость вращения, а червячные передачи преобразуют вращательное движение в поступательное.
Датчики совместно с измерительным контроллерами контролируют пространственные координаты платформ, направление и скорость вращения патрона, а также угол поворота Пл. 1, усилия при зажатии заготовки патроном
и Пл. 2 и Пл. 3 и передают эти данные в цифровых кодах в управляющую
ЭВМ.
2. Чертеж шахматной фигуры с указанием геометрических размеров
Необходимо выполнить чертеж шахматной фигуры, заданной по варианту.
Размеры фигуры выбираются самостоятельно, кроме тех, которые заданы в
задании (высота и диаметр фигуры). На рисунке 2 приведен пример такого
чертежа.
Рисунок 2 Чертеж шахматной фигуры с указанием геометрических размеров
3. Структурная схема алгоритма изготовления шахматных фигур
на токарном станке с ЧПУ
4. Алгоритмические языки программирования станков с числовым программным управлением (ЧПУ).
Для описания процессов обработки деталей на станках с ЧПУ, для программирования работы роботов - манипуляторов применяются алгоритмические языки специального назначения.
В качестве примера для СЧПУ иностранных разработок можно привести языки APT. MODAPT, FART TURN / MILL, а для СЧПУ отечественных
разработок языки ТАУ - Т, СПД - ЧПУ.
Эти языки обеспечивают формально - словесный способ описания процесса обработки.
Написанная на этих языках управляющая программа состоит из последовательности операторов и разрабатывается по следующим этапам:
1. На чертеже детали указывается система координат.
2. Каждому геометрическому объекту (точке, прямой, окружности, контуру, поверхности) ставится в соответствии номер.
3. С помощью макрокоманд рассчитываются координаты движения обра-
батывающих инструментов или других объектов.
4. На основе рассчитанных координат задается последовательность технологических команд обработки.
Последняя процедура обычно программируется совместно с технологами,
так как процесс обработки должен удовлетворять определенным требованиям технологического процесса.
4.1 Простые операторы
В алгоритмических языках имеется несколько простых операторов:
1) определение геометрических элементов;
2) присваивание;
3) безусловный переход;
4) условный переход;
5) кадр;
6) макрокоманда;
7) завершение макрокоманды;
8) ввод - вывод;
9) отображение объектов;
10) очистка экрана дисплея;
11) удаление объектов;
12) настройка параметров плоскости проекций.
Все операторы алгоритмических языков состоят из меток, имен, чисел,
служебных слов, имен функций, имен переменных, операций и разделителей.
Метки обозначаются символом N и целым числом: N1, N2, N3 и т.д.
Имена объектов обозначаются буквой и номером объекта или выражением. Наиболее частое обозначение следующее:
точка
p
прямая
l
окружность
c
контур
k
поверхность
s
множество точек (сетка)
q
4.2 Операторы определения геометрических объектов
Ниже перечислены основные операторы этой группы.
Операторы определения точки:
1) pm = pj - совпадает с точкой pj.
2) pm = x0, y0 - имеет декартовы координаты x0,y0.
3) pm = cj - находится в центре окружности j.
4) pm = lj , lk - находится на пересечение прямых j, k.
5) pm = pj , dx0, dy0 - смещена от точки j на dx0 и dy0.
6) pm = pj, ipk - расположена симметрично точке j относительно точки k.
7) pm = pj ,ilk - расположена симметрично точке j относительно прямой k.
8) pm = r0, u0 - в полярных координатах r0,u0 относительно центра коорди-
нат.
9) pm = pj , r0, u0 - в полярных координатах r0,u0 относительно точки j.
и т.д. всего 16 разновидностей операторов.
Операторы определения прямой:
1) lm = lj
- совпадает с прямой.
2) lm = x0, y0 - отсекает по осям координат отрезки x0, y0.
3) lm = pj , x0, y0 - то же с центром координат в точке j.
4) lm = pj , pk - проходит через точки j и k.
5) lm = y0 - параллельна оси x на расстоянии y0.
6) lm = x0 - параллельна оси y на расстоянии x0.
7) lm = pj , lk - параллельна прямой k, проходящую через точку j и т. д.
Всего 18 разновидностей операторов.
Операторы определения окружности :
1) cm = cj - совпадает с окружностью j.
2) cm = x0, y0, r0 - имеет центр с координатами x0, y0 , радиус r0.
3) cm = x0, y0, r0 - имеет центр в точке j, радиус r0.
4) cm = cj , dx0, dy0 - центр смещен на dx0, dy0.
5) cm = cj , r0 - центр совпадает с окружностью cj , радиус r0.
6) cm = pj , pk - центр в точке j, точка k на окружности.
7) cm = pj , lk - центр в точке j, касается с прямой k.
8) cm = pj , pk , pn - проходит по трем известным точкам и т.д.
Всего 18 разновидностей операторов.
Существует также несколько операторов определения множества (сетки) точек, пример: qm = pj, pk , n0, где точки расположены между точками j и k по
прямой на одинаковом расстоянии, число точек n0, включая точки j и k.
Существует несколько операторов определения контура, пример: km = cj ,pk ,
di - продолжение контура по окружности j до точки k при i = 1 по часовой
стрелке, при i =-1 против часовой стрелки.
Существует несколько операторов определения поверхности.
Пример: sm = ti , kj , kn - задается базовым контуром j, движущимся контуром
n, тип движения i.
4.3 Операторы движения инструмента вдоль линии
Операторы движения инструмента вдоль линии в общем виде можно
представить следующим образом:
mi = < спецификация движения >,
где i - индекс, характеризующий движение объекта (платформы, резца,
фрезы, механической руки и т.д.)
При i = 0 осуществляется быстрое перемещение объекта в заданную точку по
кратчайшему пути - по прямой. Это движение еще называется позиционированием.
При i = 1 осуществляется перемещение инструмента по прямой с заданной
скоростью.
При i = 2 осуществляется движение инструмента по заданной дуге окружности по часовой стрелке.
При i = 3 осуществляется движение инструмента по заданной дуге окружности против часовой стрелки.
Примеры:
m0 = p3 - позиционирование инструмента в точку p3.
m1 = p3 - линейное перемещение инструмента в точку p4 .
m2 = p4 c2 p5 - движение инструмента по окружности c2 по часовой стрелке от
точки p4 до точки p5.
4.4 Макрокоманды
Последовательность операторов, многократно используемая в управляющей программе, можно определить заранее, чтобы в дальнейшем вызывать
эту последовательность одной командой. Этот оператор называется макрокомандой. Она имеет следующий вид
% < имя > (< список выражений >) {< число >}
Наборы операторов тела макрокоманды хранятся в библиотеке макрокоманд и различаются по именам. В тексте общей программы макрокоманда
начинается символом %, затем следует буква и от 1 до 6 символов в виде
букв или цифр.
Пример: % MACRO (4, i42) - эта макрокоманда вначале делает присвоение
локальным переменным f1, f2 значения f1 = 4; f2 = i42. Здесь f1 - начальная переменная , f2 - число повторений данной макрокоманды во всей программе,
начинается с буквы i.
Для восстановления первоначальных значений локальных переменных после завершения макрокоманды пользуются оператором завершения макрокоманды вида M99 {< список >}.
Пример : M99 (f14 , f10 , f2)
При этом осуществляется следующие три оператора присваивания :
f14 = f1; f10 = f2 ; f2 = f3 .
По завершении оператора M99 переменные f1 и f3 восстанавливают первоначальные значения, а переменная f2 получает новое значение, равное старому значению переменной f3.
Новые значения получают также переменные f14 и f10.
В виде макрокоманд реализуется также операции по перемещению объектов в пространстве.
В теле макрокоманд может находится другая макрокоманда. Число уровней вложения макрокоманд друг в друга может достигать шести.
4.5 Вспомогательные операторы
К вспомогательным относятся операторы, которые задают параметры обрабатывающих инструментов, особенности генерации кодов движения инструментов, точку начала движения, а также параметры черновой и чистовой
обработки поверхности деталей.
Приведем некоторые примеры вспомогательных операторов:
% GENER (k) - этот оператор задает генерацию кодов движения инструмента
в абсолютных координатах при k = 0 или в приращениях координат при k =
1.
% CUTTER (d) - этот оператор задает диаметр фрезы d в мм для фрезерных
станков или расстояние от центра платформы до конца резца для токарного
СЧПУ.
% FROM (p, z) - этот оператор задает точку начала движения инструмента,
где p - номер точки, соответствующей центру платформы с координатами (x,
y), на которой крепится резец , z - исходная координата z (высота подъема)
резца или оси вращения фрезы. Для токарных станков обычно z = 0.
% THICK (t) - этот оператор задает припуск на чистовую обработку поверхности после черновой , где t - величина припуска в мм.
Вспомогательные операторы находятся обычно в начале программы или
макрокоманды.
5. Разработка программы обработки основания фигуры:
Обработка основания фигуры требуется для обеспечения устойчивости
шахматной фигуры. Для этого в основании фигуры вырезается полуокружность определенного радиуса. Первым этапом разработки программы является ввод исходных данных о геометрических объектах. Для этого на чертеже
проставляются точки, необходимые для обработки основания – начало коор-
динат, заданный диаметр фигуры, диаметр заготовки, точка центра окружности.
Программа обработки основания:
‘Ввод информации о геометрических объектах
%GENER(0) – информация о геометрических объектах записывается в абсолютных координатах
р 1 = x0, y0 – точка начала координат
р 2 = x2, y0 - точка отстоит от начала координат на 2 мм
р3 = x 0, y -12,5 - точка отстоит по оси ординат на величину радиуса фигуры
р4 = x 0, y -16 - точка отстоит по оси ординат на величину радиуса заготовки
р5 = x -13,0625, y 0
с1 = p 5, r 15,0625
р6 = х-200,у-300; исходная точка платформы 1
‘Обработка основания фигуры
% CUTTER(100)
% FROM(6, 0)
m0 = p1
m1 = p2
m 2 = p 2, c 1, p 3
m1=p4
M 99 – возврат платформы 1 в р5
6. Разработка программы предварительной обработки поверхности фигуры
Предварительная обработка поверхности фигуры требуется для исключения образования сколов древесины. Предварительная обработка заключается в срезе нескольких слоев древесины.
Программа предварительной обработки заготовки:
% GENER (0)
‘ Описание геометрических объектов
p1 = x0,y-16
p2 = x0,y-12,5
p3 = x60,y-12,5
p4 = x60,y-16
p5 = 10,y-12,5
p6 = x15,y-7,5
p7 = x60,y-7,5
p8 = x-200,y-300
‘Программа предварительной обработки заготовки
%CUTTER(100)
%FROM(8,0)
m0 = p1
m1 = p2
m1=p3
m1=p7
m1=p6
m1=p5
m 99 – возврат платформы 1 в р8
7. Разработка программы основной обработки поверхности заготовки и
обреза заготовки.
Чертеж продольного разреза фигуры:
Программа основной обработки заготовки:
% GENER (0)
‘ Геометрическое описание объекта
p1 = x10,y-12,5
p2 = x15,y-7,5
p3 = x15,y-12,5
c1 = p3,r5
p4 = x45,y-2,5
p5 = x45,y-7,5
p6 = x50,y-7,5
c2 = p5,r5
p7 = x60,y-2,5
p8 = x-200,y-300
‘ Программа обработки поверхности фигуры
%CUTTER(100)
%FROM(8,0)
m0 = p1
m2 = p1,c1,p2
m1 = p4
m2 = p4,c2,p6
m1=p7
m 99 – конец платформы и возвращение в исходную позицию.