содержание работы - страница
advertisement

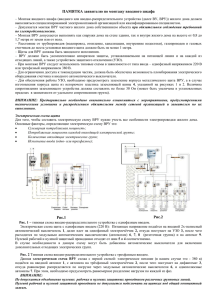
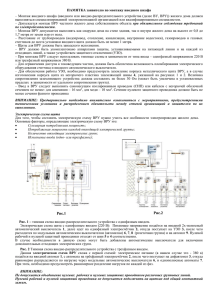
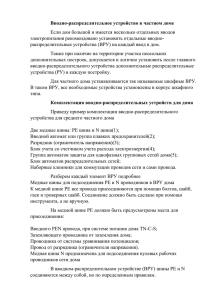
На правах рукописи Болдорев Андрей Григорьевич МЕТОД ОЦЕНКИ ЭНЕРГЕТИЧЕСКИХ ЗАТРАТ ПРИ ФУНКЦИОНИРОВАНИИ ВСЕКОЛЕСНОГО РУЛЕВОГО УПРАВЛЕНИЯ МНОГООСНЫХ КОЛЕСНЫХ МАШИН НА СТАДИИ ПРОЕКТИРОВАНИЯ Специальность 05.05.03 – Колесные и гусеничные машины АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Москва 2006 г Работа выполнена в Московском Государственном Техническом Университете им. Н.Э. Баумана. Научный руководитель: доктор технических наук, профессор Белоусов Б.Н. Официальные оппоненты: доктор технических наук, профессор Шухман С.Б. кандидат технических наук, Корнилов В.Г. Ведущая организация: ФГУП ГНЦ «НАМИ» Защита диссертации состоится «5» марта 2007 г. в 1430 на заседании специализированного совета Д 212.141.07 в МГТУ им. Н.Э. Баумана по адресу: 105005, Москва, 2-я Бауманская ул., д.5. Ваши отзывы в 2-х экземплярах, заверенные печатью, просьба высылать по указанному адресу. С диссертацией можно ознакомиться в библиотеке МГТУ им. Н.Э. Баумана. Автореферат разослан «__» ________ 2007 г. Ученый секретарь диссертационного совета доктор технических наук, профессор 2 Котиев Г.О. ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы. В любой отрасли хозяйственной деятельности государства главным является экономическая целесообразность используемых технических средств, и законы экономики побуждают к их совершенству. По расчетам отечественных и зарубежных специалистов, увеличение полной массы автомобиля снижает издержки на перевозки грузов и число обслуживающего персонала. Однако рост полной массы автомобиля ограничивается существующим дорожным законодательством, которое регламентирует осевую массу и габаритные размеры. Таким образом, по существующему дорожному законодательству практически все автомобили большой и особо большой грузоподъемности являются внедорожными и в обычных условиях им разрешаются только разовые проходы по дорогам общего пользования. Поэтому повышение грузоподъемности сопровождается очень часто увеличением числа осей – как ведущих, так и не ведущих. В России и за рубежом появляется все больше многоприводных автомобилей с четырьмя и более осями. Эти автомобили принято называть многоосными колесными машинами (МКМ). Важную роль МКМ играют и в Вооруженных силах России. Удельный вес МКМ в парке автомобилей Вооруженных Сил РФ небольшой, но на них монтируется вооружение, способное решить судьбу операции и войны в целом. Например, на МКМ монтируется вооружение широко известного ракетного комплекса «Тополь» и оборудование боевого обеспечения его работы. Габаритные размеры и число осей МКМ, особенно предназначенных для перевозки длинномерных неделимых грузов, в наибольшей степени отражаются на потребительских свойствах машин, которые определяются показателями поворотливости и поворачиваемости транспортных средств. Основной причиной снижения значений этих показателей является традиционность подхода к выбору схемы рулевого управления (РУ). Наиболее перспективной схемой РУ для МКМ общепризнанна схема всеколесного рулевого управления (ВРУ). Механический привод поворотом колес делает ВРУ практически неприемлемым для шасси с числом осей более трех. Тем более практически невозможно при механическом приводе в системе управления изменять в зависимости от условий движения соотношение углов поворота различных колес. В настоящее время в теории автомобиля достаточно подробно обоснованы различные алгоритмы функционирования ВРУ, которые определяют соотношения углов поворота колес МКМ в той или иной дорожной ситуации или в тех или иных условиях маневрирования машины. 1 Однако научно-обоснованных принципов и рекомендаций по построению электрогидравлических приводов колес МКМ и основных требований к ним в научно-технической литературе не опубликовано. Это сдерживает развитие МКМ в целом. Таким образом существует и требует своего решения актуальная научная проблема выявления научно-обоснованных закономерностей функционирования всеколесного рулевого управления с электрогидравлическим приводом поворота колес в сложной системе «МКМдорога» и разработки на их основе стройной системы технических требований и основных принципов построения подобных приводов. Важнейшей научной задачей в этой проблеме является оценка и рационализация энергетических затрат, необходимых для реализации заданных кинематических параметров при криволинейном движении МКМ с ВРУ. Цели и задачи. Целью диссертационной работы является установление закономерностей формирования энергетических затрат при функционировании всеколесного рулевого управления многоосных колесных машин и совершенствование на их основе методов расчета для различных типов приводов и схем РУ. Для достижения намеченной цели в работе были поставлены и решены следующие задачи: 1. Анализ условий функционирования рулевого управления в системе «водитель – автомобиль – дорога» и ранее выполненных работ по развитию теории криволинейного движения. 2. Разработка математического описания функционирования рулевого управления различных схем с гидравлическим исполнительным механизмом и различными типами его привода. 3. Выбор и обоснование конструктивных факторов и критериев оценки, необходимых для установления закономерностей функционирования всеколесного рулевого управления. 4. Теоретическое исследование функционирования всеколесного рулевого управления с различными типами привода гидравлического исполнительного механизма. 5. Экспериментальное исследование с целью проверки адекватности и точности математической модели колесной машины с всеколесным рулевым управлением. 6. Разработка программной реализации математической модели и методики расчета энергетических параметров при проектировании колесных машин с ВРУ. Методы исследования. Исследования проводились с использованием численных методов моделирования движения автомобиля по криволинейной 2 траектории на ЭВМ. Экспериментальные исследования основывались на использовании натурных опытных образцов МКМ и современных методов испытаний автомобильной техники на устойчивость и управляемость при установившемся криволинейном движении и при движении по переходным траекториям. Объектом исследования является система ВРУ с дистанционным электрогидравлическим приводом МКМ с числом осей от 4-х до 12-ти. Научная новизна. Новизна полученных результатов работы при решении вышеуказанной научной задачи заключается в том, что в ней: разработана новая математическая модель функционирования рулевого управления различных схем с гидравлическим исполнительным механизмом и различными типами его привода; впервые установлены закономерности работы ВРУ с электрогидравлическим приводом поворота колес в сложной системе МКМдорога; создана система технических требований и разработаны основные принципы построения ВРУ с дистанционным электрогидравлическим приводом с учетом кинематических и энергетических параметров МКМ. создан метод расчета энергетических параметров при проектировании колесных машин с всеколесным рулевым управлением. Эти результаты и выносятся на защиту. Практическая ценность. Разработанный метод и програмно-методический аппарат, реализованный на ЭВМ, может быть использован в КБ автомобильных заводов для оценки и выбора схем и гидравлических элементов РУ перспективных МКМ на стадии их проектирования, в НИУ для проведения исследований криволинейного движения автомобилей, а так же в учебных целях. Реализация результатов работы. Основные результаты исследований реализованы в следующих направлениях: система технических требований по энергетическим параметрам электрогидравлического привода ВРУ МКМ используется войсковой частью 93603-Н и 21 НИИИ Минобороны РФ при разработке ОТТТ к специальным колесным шасси и ТТЗ на ОКР по их разработке; метод расчета энергетических параметров при проектировании колесных машин с всеколесным рулевым управлением используется при выполнении плановой научной тематики НПЦ СМ МГТУ им. Н.Э. Баумана; создан макетный образец 12х12 с всеколесным рулевым управлением и электрической трансмиссией полной массой 90 т. основные положения диссертационной работы используются в учебном 3 процессе кафедры М10 МГТУ им. Н.Э. Баумана и Рязанского военного автомобильного института. Апробация работы. Основные положения работы обсуждались: на научных семинарах кафедры М10 «Колесные машины» МГТУ им. Н.Э. Баумана в 2003…2006 гг. (г. Москва); на научных семинарах кафедры «Тягачи и амфибийные машины» ГТУ МАДИ в 2003 и 2004 гг. (г. Москва); на 47 международной научно-технической конференции «Повышение конкурентоспособности автотранспортных средств» (г. Минск 2004 г.); на международной научно-технической конференции «Механика – машиностроению» (г. Минск 2005 г.); на научных семинарах в ОАО «Инновационная фирма «НАМИСервис»» в 2004 и 2005 гг; на международной научно-технической и научно-методической конференции «Гидрогазодинамика, гидравлические машины и гидропневмосистемы» (МЭИ (ТУ), г. Москва 2006 г.). Публикации. Основное содержание диссертационной работы отражено в 4 статьях. Структура и объем работы. Диссертация состоит из введения, четырех глав, выводов по работе, списка использованных источников (72 наименования) и приложения. Содержание работы изложено на 209 страницах машинописного текста, в том числе 72 рисунка, 10 таблиц и приложение. СОДЕРЖАНИЕ РАБОТЫ Во введении показана актуальность темы, определена цель работы, приведено краткое содержание выполненных исследований, отражены основные положения, которые выносятся на защиту. В первой главе изложены состояние вопроса, обоснование решаемой научной задачи. Проведен анализ результатов теоретических и экспериментальных исследований по созданию ВРУ многоосных машин. Особенно отмечены работы Д.А. Антонова, П.В. Аксенова, А.С. Литвинова, Я.Е. Фаробина, Г.А. Смирнова, Ю.А. Брянского, Б.Н. Белоусова, В.Г. Корнилова и труды научных школ МГТУ им. Н.Э. Баумана, академии БТВ, 21 НИИИ МО РФ и ФГУП ГНЦ «НАМИ». Проведенный в диссертации анализ схем рулевого управления автомобилей показывает, что на современных МКМ с числом осей от 4 до 7 применяются в основном схемы рулевого управления, в которых управляемыми являются колеса передних осей. Однако наиболее перспективной схемой РУ для МКМ общепризнанна схема всеколесного рулевого управления (ВРУ). 4 Из анализа следует также, что на сегодняшний день значительно возросло число вариантов схем РУ, которые потенциально могут быть использованы на одном и том же автомобиле, а это требует их всесторонней оценки. В настоящее время в теории автомобиля достаточно подробно обоснованы различные алгоритмы функционирования ВРУ, которые определяют соотношения углов поворота колес МКМ в той или иной дорожной ситуации или в тех или иных условиях маневрирования машины. Однако научно-обоснованных принципов и рекомендаций по построению электрогидравлических приводов колес МКМ и основных требований к ним в научно-технической литературе не опубликовано. Это сдерживает развитие МКМ в целом. В связи с вышеизложенным были поставлены цель и задачи, сформулированные выше. Во второй главе приводится описание математической модели криволинейного движения МКМ с моделью функционирования рулевого управления с различными приводами В модели, расчетная схема которой представлена на рис.1 приняты допущения и приняты допущения и ограничения, которые являются типичными для решения научных задач, подобных решаемой в данной работе. Рис.1. Расчетная схема криволинейного движения МКМ При разработке расчетной схемы гидравлического привода ВРУ, представленной на рис.2 приняты следующие допущения: привод (ДВС или электродвигатель) источника энергии системы ВРУ 5 и регулирующая аппаратура обеспечивает его номинальные характеристики во всем диапазоне работы; жидкость рассматривается как распределенная масса на n-участков; плотность рабочей жидкости, в пределах эксперимента, принимается постоянной; влиянием быстродействия электронных устройств на работу ВРУ пренебрегаем. pk 1п nп Xp1 БВК Ck P2.1 P1.1 mп Xpn Msp1 D P1.n mп Cu Xz1 MM Ck P2.n a knп Cu mкол ДОС ДОС mкол Pc Va Pa Mspn D a k1п Xzn MM Pc Lтр Pí Qí Pc Pc Msp1 Xz1 MM P2.2 mп P1.2 Cu Ck ДОС mкол D mп P1.n Xp1 1л a knл MM ДОС D Mspn Xzn a k1л P2.n Cu mкол Ck Xpn nл Рис.2. Расчетная схема электрогидравлического привода ВРУ Разработанная математическая модель позволяет проводить исследования различных свойств МКМ с числом осей от 4 до 12(ограниченно программно), различной их расстановкой по базе и различными схемами и алгоритмами функционирования этих схем РУ при криволинейном движении. Расчетная схема привода рулевого управления учитывает зазоры в приводе рулевого управления колеса, сжимаемость и утечки рабочей жидкости, длину трубопроводов, силы трения, жесткости и массы привода управляемых колес и распределителя, наличие нескольких потребителей. ММ имеет блочную структуру. Такая структура дает возможность вести расчет криволинейного движения МКМ как с учетом работы привода ВРУ, так и без него, что позволяет провести оценку влияния привода на мощностные затраты в ВРУ. Основные уравнения, входящие в ММ представлены ниже. Движение i-го колеса на j-м борту в системе координат, связанной с колесом, описывается следующей системой дифференциальных уравнений: 6 1 RZij Frij zCkij Mk 1 M Pij M СПij kij J kZ 1 Rxij rkci fij RZij rkci kij J kY (1) где zCkij - вертикальное ускорение центра масс колеса; Мк – масса колеса; RZij , Rxij - соответственно вертикальная и тангенциальная реакции в пятне контакта колеса с дорогой; Frij - сила, действующая со стороны подвески на колесо; kij , kij - угловые ускорения колеса в плоскости дороги; J k Z , J kY моменты инерции колеса; M Pij - момент создаваемый рулевым управлением; M СПij - момент сопротивления повороту колеса; rkci - свободный радиус колеса; fij – коэффициент сопротивления качению колеса; Переход между системами координат, связанными с колесами и корпусом осуществляется с помощью матриц направляющих косинусов. Система дифференциальных уравнений, описывающих движение корпуса МКМ: dY d Z d X 2 2 J X dt J XY dt J XZ dt J yz (Z Y ) Z Y ( J z J y ) X Y J XZ Z X J XY L(e)X J YX d X J Y d Y J YZ d Z J ZX ( X2 Z2 ) dt dt dt X Z ( J X J Z ) X Y J YZ Z Y J XY L(e)Y d X d Y d Z J YZ JZ J XY (Y2 X2 ) J ZX dt dt dt X Y ( J Y J X ) X Z J YZ Z Y J XZ L(e)Z 1 n (e) xc Fix M i 1 n y c 1 Fiy( e ) M i 1 n z c 1 Fiz( e ) M i 1 X sin sin cos sin cos sin Y Z cos (2) 7 где М масса автомобиля; xc , yc , zc - продольное, поперечное и вертикальное ускорение центра масс автомобиля соответственно; x , y ,z – угловая скорость автомобиля относительно продольной, поперечной и вертикальной осей соответственно; J x , J y , J z - осевые моменты инерции относительно продольной, поперечной и вертикальной осей соответственно; J xy , J yz , J zx - центробежные моменты инерции; L(xe) , L(ye) , L(ze) - крутящие моменты внешних сил относительно продольной, поперечной и вертикальной осей соответственно; N N N k 1 k 1 k 1 Fkx(e) , Fky(e) , Fkz(e) - суммы проекций внешних сил на продольную, поперечную и вертикальную оси соответственно; , , - углы Эйлера-Крылова; n - число осей автомобиля. Реакции в пятне контакта колеса с дорогой: (3) Rzi cшi шi +K ашi шi , где Сш -жесткость шины; шi , шi - соответственно деформация и скорость деформации шины; Kаш -коэффициент демпфирования шины; (4) Ryi q (- K yэ ) i , где Куэ экстремальное значение коэффициента сопротивления боковому уводу шин; δi – угол бокового увода колеса; q - произведение частных коэффициентов, учитывающих нелинейный увод шин в различных условиях работы эластичного колеса. M ki Rxi c , (5) rki p Rx' i Ryi i где Mki – крутящий момент подведенный к колесам; λр -коэффициент тангенциальной эластичности шины; Момент сопротивления повороту колеса с учетом его качения по криволинейной траектории определяется по зависимости: (6) М СПi М СКi М ССi М СГi М СДi , где МСКi - момент сопротивления от кинематического увода; МССi момент сопротивления от кинематического увода; МСГi -момент сопротивления от углового перемещения отпечатков колес относительно опорной поверхности; МСДi - момент сопротивления от блокировки дифференциалов. Момент, создаваемый исполнительным механизмом рулевого управления: (7) M руi FПi hПi Kk , где FП – сила на штоке гидроцилиндра, hП – плечо приложения силы на штоке гидроцилиндра; КК – коэффициент, учитывающий нелинейность кинематики рулевого управления 8 Мощность, затраченная в рулевом управлении определяется как мощность на валу гидронасоса рулевого управления: 9,8 105 QГС Р (8) N ГС , Н где QГС – расход рабочей жидкости в гидросистеме; ΔР – перепад давления в гидросистеме; ηН – полный КПД насоса. Расход на i-м участке трубопровода: t Pi 1 Pi 2 0,785 dt2 (9) Qi dt Lt 0 где Р – давление жидкости; d – диаметр участка; L – длина участка Перепад давления на кромке золотника: 12 (h xз ) QH2 (10) PН QH , 2 g l 2 l 3 где ξ – коэффициент местных потерь; γ – удельный вес жидкости; ν – кинематическая вязкость жидкости; ρ – плотность жидкости; l∑, - соответственно длина и ширина щели; h – перекрытие золотника; хз – ход золотника, QH – расход жидкости через кромку. Уравнение движения колеса: M M СПi M ТР кi K Дк кi РУi , (11) J кZ где MТР – приведенный момент трения в кинематике рулевого управления; кi - скорость поворота колеса; КДк – коэффициент демпфирования. Уравнение (7) является уравнением связи между моделью криволинейного движения МКМ и моделью ВРУ. Таким образом, представленные уравнения являются математическим описанием криволинейного движения МКМ с учетом работы системы ВРУ с централизованным и автономным электрогидравлическим приводом. Третья глава содержит полученные путем математического моделирования закономерности функционирования рулевого управления различных схем в сложной системе МКМ-дорога. Главной задачей теоретического исследования является определение закономерностей формирования затрат мощности на функционирование рулевого управления и криволинейное движение МКМ, а так же оценка параметров алгоритмов ВРУ, при которых эти затраты имеют минимум своего значения. Для оценки влияния числа осей на энергетические затраты ВРУ в качестве объектов исследования приняты МКМ с числом осей от 4 до 12. Для оценки энергетических затрат ВРУ использованы три вида испытаний: вход в круг; смена полосы движения («переставка»); рывок руля. 9 Данные виды криволинейного движения (далее «маневров») используются при приемочных испытаниях автомобилей и дают достаточно полное представление об основных преимуществах и недостатках исследуемых схем рулевого управления. На основании предложенных и обоснованных В.Г. Корниловым алгоритмов функционирования ВРУ, в данной работе рассматриваются схемы рулевого управления с регулируемым смещением полюса рулевого управления (рис.3) по: - углу поворота задающего колеса (РСП-У) для шасси с колесной формулой 8х8, выражение (12); - углу и скорости движения (РСП-УС) для всех типов МКМ, выражение (13). Xp max C P' -Xp P O'T OT Рис. 3. Схема ВРУ с переменным полюсом поворота Закон смешения полюса поворота РСП-У: Xp з X p max K K X pи 1 X pи X p max X pи , (12) где - угол поворота задающего колеса; Xp max – максимальное смещение полюса РУ; Xp и – исходное смещение полюса РУ; К – параметр, 10 характеризующий закон смещения полюса поворота в зависимости от угла поворота колеса; з – коэффициент исходного смещения полюса поворота. Закон смещения полюса поворота РСП-УС: K X p max Vxm X pи Xp K VXmmax з , (13) где m – параметр, характеризующий закон смещения полюса поворота в зависимости от скорости движения МКМ; VX, VXmax – текущая и максимальная соответственно скорости движения МКМ. В качестве варьируемых величин использовались параметры К, αз и m математического описания алгоритмов РСП-У и РСП-УС. Для сравнения, в качестве «базового» варианта использованы штатные схемы рулевого управления шасси. Схема с фиксированным полюсом поворота ВРУ не рассматривалась, т.к. она обладает наихудшим показателем устойчивости по сравнению с остальными схемами, включая не всеколесное РУ. По результатам проведенного исследования были получены зависимости затрат мощности в ВРУ и трансмиссии при криволинейном движении МКМ. На рис. 4 показаны затраты мощности в РУ и полная мощность (суммарные затраты в трансмиссии и в РУ) на криволинейное движение в зависимости от параметров закона управления РСП-УС для 6осной машины. Из данных рис.5 можно заключить, что несмотря на увеличение затрат мощности в ВРУ по сравнению с штатным РУ от 15 до Мощность, затрачиваемая в мощность ГС РУ шестиосной при различных законах 43%, полная затрачиваемая примашины использовании закона с m=2 управления. Маневр "Вход в круг" уменьшается на 2-6%, что подтверждает целесообразность использования ВРУ с точки зрения снижения мощностных затрат. 143,1 141,1 160 135,0 140 % 100,0 118,4 118,4 115,5 100,0 120 100 80 N 60 40 РСП-УС, m=0,1 20 РСП-УС, m=2 0 αз=0,3 αз=0,2 а) αз=0,1 Штатное РУ а) 11 Полная мощность, затрачиваемая шестиосной машиной при различных законах управления. Маневр "Вход в круг" 114,7 112,9 109,9 120 100,0 100 100,0 97,4 96,0 % 80 93,8 60 N 40 РСП-УС, m=0,1 20 РСП-УС, m=2 0 αз=0,3 αз=0,2 а) αз=0,1 Штатное РУ б) Рис. 4. Мощность, затрачиваемая 6-осной машины при гиперболическом законе управления (К=0,1). Маневр «Вход в круг»: а) Мощность в рулевом управлении; б) полная мощность Не маловажным является учет работы рулевого привода на мощностные затраты в ВРУ. Мощность в ВРУ МКМ типа МАЗ-7907 при выполнении "маневра" "переставка" На рис. 5 представлены результаты моделирования «маневра» «переставка». 35 кВ т 30 25 20 N 2 15 10 3 1 5 0 0 1 2 3 4 t 5 6 7 8 c Рис. 5. Мощность в ВРУ 12-осной машины при выполнении маневра «Переставка»: 1 – Мощность, необходимая для поворота колес; 2 – мощность, затрачиваемая в централизованной системе (дроссельное регулирование) ВРУ; 3 – мощность, затрачиваемая в автономном приводе (объемное регулирование) ВРУ 12 Анализ данных рис.5 показывает, что мощность, потребляемая ВРУ, зависит от типа привода. При использовании ЭГС с дроссельным приводом (кривая 2) затрачивается наибольшая мощность, причем ее максимум не совпадает с максимумом мощности, необходимой для поворота колес (кривая 1). Это объясняется тем, что КПД дроссельного привода зависит от соотношения усилия нагрузки и расхода рабочей жидкости (т.е. скорости поворота колес). При использовании ЭГС с объемным регулированием (кривая 3) затраченная мощность по характеру совпадает с мощностью на колесе, и значительно меньше мощности, затраченной в случае использования ЭГС с дроссельным приводом. В четвертой главе приводятся результаты экспериментальных исследований, полученных в ходе исследовательских испытаний макетных образцов 4-осного Э79085 и 6-осного шасси с ВРУ. Дается описание макетных образцов, контрольно-измерительного комплекса, оценка точности и адекватности математической модели. Сформулирована система технических требований к приводу поворота колес ВРУ для МКМ. Сходимость результатов теоретических и экспериментальных исследований проводилась по критериям затрат мощности в трансмиссии при повороте автомобиля с различными радиусами поворотами (рис.6) и по боковому ускорению на задней оси (рис.7); Затрачиваемая мощность в трансмисии МКМ Э79085 120 кВт 100 80 N 1 2 60 40 3 20 0 1,0 1,5 2,0 2,5 t 3,0 3,5 4,0 с Рис. 6. Затрачиваемая мощность в трансмиссии МКМ Э79085: - по данным эксперимента; – – – – - по расчетным данным; 1 – RП=11,7 м; 2 – RП=22,5 м; 3 – RП=38,5 м 13 5 /c 2 4 3 1 2 y 1 0 -1 2 -2 -3 -4 -5 0 1 2 3 t 4 5 cek Рис. 7. Характер изменения величины бокового ускорения на задней оси y МКМ Э79085 при движении по «переставке»: 1 – по данным эксперимента; 2 – по расчетным данным. Расхождение результатов исследований по критерию бокового ускорения на задней оси составляет не более 16,6%, по затратам мощности на криволинейное движение - не более 17%, что подтверждает возможность рекомендации использования созданного инструмента расчета ВРУ при проектировании МКМ. В выводах по работе даются общие выводы по результатам проделанной работы. В приложении приведены основные технические требования на разработку технического задания системы ВРУ МКМ с переменным полюсом поворота с колесной формулой 12х12 по результатам проведенных теоретических и экспериментальных исследований. ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ ПО РАБОТЕ 1. Теоретически установлены и экспериментально подтверждены основные закономерности формирования энергетических затрат при функционировании всеколесного рулевого управления МКМ, представленные в виде расчетной схемы и математической модели работы системы ВРУ с дистанционным электрогидравлическим приводом (ЭГП) при криволинейном движении МКМ, на основе которых базируется метод оценки энергетических затрат ВРУ МКМ. 14 2. Получено, что: для МКМ 8х8 наибольшая полная затраченная мощность при схеме РСП-У с гиперболическим законом управления (К=0,1) и коэффициентом исходного смещения полюса αз=0,3 рад. Этот режим следует принимать в качестве расчетного при составлении мощностного баланса; для МКМ 8х8, с точки зрения кинематических параметров предпочтительно использовать схему РСП-У и параболический закон управления с коэффициентом исходного смещения полюса αз=0,2 рад. Однако минимальная мощность затрачивается при использовании схемы РСП-УС и гиперболического закона управления с коэффициентом исходного смещения полюса αз=0,1 рад. Разница полной затрачиваемой мощности между этими режимами при выполнении маневра вход в круг составляет 47,7%, при выполнении маневра переставка 4,2%; расчет мощностных затрат в системе ВРУ автомобилей, с числом осей больше 4-х необходимо вести со следующими параметрами: схема управления РСП-УС, гиперболический закон управления с коэффициентом исходного смещения полюса αз=0,3 рад., m=0,1; оптимальными с точки зрения кинематических параметров для автомобилей, с числом осей больше 4-х являются следующие режимы: схема управления РСП-УС, гиперболический закон управления (К≈0,8) и коэффициент исходного смещения полюса αз=0,1…0,2 рад. С точки зрения энергозатрат в рулевом управлении эти режимы так же являются предпочтительными. При изменении параметра m с 0,1 до 2, затрачиваемая мощность на этих режимах уменьшается не более чем на 17%; расчет мощностных затрат в приводе ВРУ необходимо вести в тесной взаимосвязи с алгоритмами работы, заложенными в систему управления ВРУ из-за значительной нелинейности этих алгоритмов. 3. Сформулированы основные технические требования на разработку ВРУ с ЭГП МКМ с переменным полюсом поворота. 4. Экспериментально подтверждены теоретические выводы о различных затратах мощности в трансмиссии в зависимости от схемы рулевого управления, и гидравлической системы. Расхождение результатов исследований по критерию бокового ускорения на задней оси составляет не более 16%, по затратам мощности на криволинейное движение - не более 17%. 5. Направлением дальнейших исследований является развитие теории создания ВРУ с индивидуальным (автономным) приводом объемного регулирования. 15 ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИССЕРТАЦИИ ОТРАЖЕНЫ В СЛЕДУЮЩИХ РАБОТАХ 1. Система всеколесного управления для АТС 12х12. / Б.Н. Белоусов, А.Г. Болдорев, С.В. Наумов, С.И. Кацан // Автомобильная промышленность. Машиностроение. -2004. - №12. С.13-16. 2. Белоусов Б.Н., Болдорев А.Г. Типы всеколесных рулевых управлений многоосных машин // Повышение конкурентоспособности автотранспортных средств: Сб. науч. тр./НИРУП «Белавтотракторостроение». – Минск, 2004. – С.249-256. 3. Белоусов Б.Н., Болдорев А.Г. Всеколесное рулевое управление с автономным приводом // Автомобильная промышленность. Машиностроение. -2005. - №11. С.16-17. 4. Болдорев А.Г., Наумов С.В. Метод расчета гидравлической системы многоосных машин с всеколесным рулевым управлением // Гидрогазодинамика, гидравлические машины и гидропневмосистемы: Тр. Междунар. науч.-техн. и науч.-метод. конф. – М.- 2006. – С 151-153. 5. Обоснование создания перспективных многоосных специальных колесных шасси с использованием электротрансмиссии. Этап 4. Отчет по теме «Бальзамин» / НПЦ СМ МГТУ им. Н.Э. Баумана. Руководитель темы С.Д. Попов. ГР № 4539802, Инв. №11/НПЦ СМ. – М., 2003.– 150с. 6. Поиск, разработка предложений и рекомендаций по использованию новых технических решений при создании и отработке основных узлов, агрегатов и систем. Отчет по теме «Полупар» / ЦТС. Руководитель темы С.Д. Попов. ГР №3438801, Инв№76/1-2. – М., 2001. – 84 с. 7. Системные исследования модернизационного потенциала В и ВТ РВСН в обоснование концепции поэтапной модернизации их основных систем и элементов. Отчет по теме «Претендент» этап 3.3. / НПЦ СМ МГТУ им. Н.Э. Баумана. Руководитель темы С.Д. Попов. ГР №6239905, Инв№35б/НПЦ СМ. – М., 2006. – 130 с. Подписано в печать ___________ Усл. печ. л. 1,0. Тираж 100 экз. Заказ №___. Типография МГТУ им. Н.Э. Баумана 16