На правах рукописи
БОБРОВСКИЙ Денис Ильич
НОРМИРОВАНИЕ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК СУДОВ
СМЕШАННОГО РЕКА­МОРЕ ПЛАВАНИЯ
Специальность ­ 05.22.19
«Эксплуатация водного транспорта, судовождение»
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Новосибирск 2009
Работа выполнена в ФГОУ ВПО «Новосибирская
академия водного транспорта»
государственная
кандидат технических наук,
доцент Саленек Валерий Владимирович
Научный руководитель:
Официальные оппоненты: доктор технических наук,
профессор Клементьев Александр Николаевич
кандидат технических наук,
доцент Лебедев Олег Юрьевич
Ведущая организация: ОАО «Томская судоходная компания»
Защита состоится
2009 г. в
часов в
ауд. 227 на заседании диссертационного совета Д 223.008.02 при ФГОУ ВПО
«Новосибирская государственная академия водного транспорта» по адресу:
630099, Новосибирск, ул. Щетинкина, 33., НГАВТ (тел/факс: (383) 222­49­76;
E­mail: ngavt@ngs.ru).
С диссертацией можно ознакомиться в библиотеке ФГОУ ВПО НГАВТ.
Автореферат разослан « t > o »
Ученый секретарь
диссертационного совета
fflfa
jLBJBu­Я.
2009 г.
J/C^JZ&UU^
Михайлова Т.Н.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Задача повышения безопасности плавания
вляется одной из важнейших при проектировании и эксплуатации судов. Все
ышесказанное в полной мере относится и к судам смешанного река­море
лавания, которые активно используются в морском судоходстве и на
нутренних водных путях нашей страны. Это особенно актуально в связи с
ем, что в последние годы финансирование дноуглубительных работ на
нутренних водных путях России сокращалось. В результате этого реки
остепенно возвращаются в свое естественное состояние, что делает их
іалопригодными для судоходства, так как значительно усложняет проводку
удов по затруднительным участкам. Особенно сильно это касается судов
мешанного плавания, имеющих довольно большие, по речным меркам,
абариты.
В этом случае перед судовладельцами встает задача улучшения
інерционных качеств принадлежащих им судов и строительство новых судов,
імеющих
такие
инерционные
характеристики,
которые
позволят
ксплуатировать данные суда в сложных условиях внутренних водных путей.
роме того, следует уделять внимание инерционности судов еще и потому, что
орошие характеристики, в первую очередь, активного торможения являются
дним из важнейших гарантов безаварийного плавания, что было
еоднократно отмечено в работах В.Г. Павленко, Н.Ф. Соларева, А.Д. Гофмана
других исследователей.
Исходя из вышесказанного, следует, что задача нормирования
нерционных качеств судов смешанного плавания является актуальной.
еобходимость выработки нормирующих критериев, которые бы учитывали
собенности, состояние и специфику района плавания данных судов, является
есьма целесообразной.
Цель исследования ­ повышение безопасности плавания судов
мешанного река­море плавания в стесненных условиях внутренних водных и
орских путей.
Поставленная главная цель предполагает достижения двух частных
елей: повышение безопасности плавания за счет выработки критериев
нерционных качеств судна и их последующего использования в практике
удоходства; улучшение инерционных качеств уже существующих судов с
четом специфики района плавания.
Задачи исследования. Достижение целей исследования реализуется
тем решения следующих частных задач:
­ провести анализ существующих способов расчета инерционных
ачеств судов. Выделить оптимальный способ расчета с точки зрения точности
олучаемых результатов и трудоемкости;
\Ѵ
­ провести анализ основных существующих способов и средст
улучшения инерционных качеств судов. Выделить оптимальный способ
точки зрения эффективности и простоты конструкции;
­ после выбора оптимального средства улучшения инерционных качест
судна выполнить экспериментальное исследование его гидродинамическ
характеристик и эффективности;
используя экспериментально полученные гидродинамически
характеристики тормозного средства, составить математическую моде
торможения судна, оборудованного указанным средством;
­ выработать нормирующий критерий допустимого пути активног
торможения судна, как экстренного маневра;
­ предложить способы практического применения полученного критері
в целях повышения безопасности плавания.
Объект исследования ­ инерционные качества судна и средства
улучшения.
Предмет исследования ­ безопасность плавания судов смешанног
плавания в стесненных речных и морских условиях.
Методы исследования. Методы геометрии, высшей математики
математического анализа, численные методы решения дифференциальны
уравнений и обработки экспериментальных данных. Методы проведени
модельных испытаний в прямых опытовых бассейнах.
Научная новизна заключается в следующем:
­ предложен новый критерий допустимого пути активного торможен
судна при следовании по криволинейному участку водных путей;
­ проведен анализ существующих способов расчета инерционны
качеств судов;
­ проведены несамоходные модельные испытания судна оборудованног
бортовыми тормозными щитами с варьированием места их установки по длин
корпуса, угла раскрытия и глубины фарватера, включая предельно
мелководье;
­ проведены самоходные модельные испытания судна, оборудованног
бортовыми тормозными щитами, по определению эффективности щитов ка
средства экстренного торможения;
­ получены расчетные выражения для коэффициентов продольной
поперечной сил на тормозных щитах в зависимости от угла раскрытия
относительной глубины фарватера;
­ составлены математические модели свободного и активног
торможения судна, оборудованного бортовыми тормозными щитами.
Положения, выносимые на защиту:
­ методика определения гидродинамических характеристик бортовь
раскрывающихся тормозных щитов;
4
­ математическая модель маневров торможения судна, оборудованного
ортовыми раскрывающимися тормозными щитами;
­ нормирующий критерий допустимого пути активного торможения
удна при движении по криволинейным участкам водных путей.
­ рекомендации судоводителям по выбору безопасной скорости при
шижении по криволинейным участкам водных путей.
Практическая значимость результатов работы состоит в том, что:
экспериментальным путем получена методика определения
идродинамических характеристик бортовых раскрывающихся тормозных
цитов, которая может быть использована при проектировании этих средств
кстренного торможения судна;
­ предложен новый нормирующий критерий допустимого пути
ктивного торможения судна при движении по криволинейным участкам
одных путей. Данный критерий может быть использован как рекомендация
удоводителям при управлении судном на затруднительных участках в
ачестве дополнительной меры повышения безопасности плавания;
­ разработаны рекомендации судоводителям по выбору безопасной
корости при движении по криволинейным участкам пути.
Обоснованность
и
достоверность
выполненной
работы
юдтверждается удовлетворительным совпадением результатов теоретических
ісследований с экспериментальными исследованиями в прямом опытовом
ассейне НГАВТ.
Реализация результатов исследования. Результаты работы внедрены в
чебный процесс на судоводительском факультете НГАВТ.
Апробация работы. Результаты работы обсуждались на заседаниях
афедры «Судовождения» и научно­технической конференции НГАВТ
(Водный транспорт России вчера, сегодня, завтра».
Публикации. По теме диссертации опубликовано 7 статей, одна из
оторых вошла в издание, рецензируемое ВАК.
Структура и объем диссертации. Диссертация состоит из введения, 4
лав и заключения, изложена на 153 страницах машинописного текста и
ключает 62 рисунка, 16 таблиц, список использованных источников из 85
аименований.
СОДЕРЖАНИЕ ДИССЕРТАЦИИ
Во введении содержатся общие сведения о работе, обоснована
ктуальность темы, поставлена научная задача, сформулированы цели
юследования и вытекающие из них частные задачи, оценены научная новизна
аботы и практическая значимость полученных результатов, выделены
оложения, выносимые на защиту.
5
В первой главе проведен анализ существующих способов расчет
инерционных качеств судна (маневры свободного и активного торможения)
Были рассмотрены методы, предложенные следующими авторами: метод Н.Ф
Соларева, метод А.Д. Гофмана, уточненный метод В.Г. Павленко, упрощенны
метод В.Г. Павленко. Данные методы анализировались с точки зрения дв
критериев, точности получаемых результатов и наименьшей трудоемкости,
целью выбора оптимального варианта, предполагаемого к использованию
данной работе. Результаты анализа проиллюстрированы в таблице 1.
4706
5,7
507
513
512
532
540
5402
5807
6984
3685
4642
3565
4113
6293
4316
3914
5,5
5,2
5,3
5,3
5,8
6,4
5,5
5,6
5,6
5,2
465
530
562
410
496
477
488
539
490
479
473
540
571
420
504
485
499
545
500
488
476
537
572
424
502
483
499
546
504
489
495
555
588
444
525
513
520
565
525
509
502
569
597
453
532
520
527
575
534
518
Натурный
Метод А.,
Гофмане
791
Метод Н.Ф.
Соларева
613
1557
1577
1553
Упрощенн
ый
488/А
Уточненн
ый
292
630
621
Скорость полного
хода судна, м/с
488­
АМ/2
0225
Водоизмещение, т
№ проеі
Таблица 1 ­ Сравнение результатов расчетов пути активного торможени
судов смешанного плавания, полученных различными методами, с данным
натурных испытаний.
Путь активного торможения, м
Метод
В.Г. Павленко
Из таблицы видно, что все методы расчета обладают достаточной дл
практических расчетов точностью. Однако методы В.Г. Павленко обладаю
более высокой точностью, чем остальные. С точки зрения трудоемкост
вычислений выгодно отличается от всех остальных упрощенный метод В.Г.
Павленко. Таким образом, данный метод был признан оптимальным дл
дальнейшего использования.
Также в первой главе был проведен анализ основных существующих
способов улучшения инерционных качеств судов, среди которых применение
б
одяных
парашютов,
горизонтальных
профилированных
рулей,
станавливаемых в кормовой оконечности судна, раздельной перекладки
удовых рулей и бортовых тормозных щитов. Анализ имел своей целью выбор
птимального средства улучшения инерционных качеств судов с точки зрения
ффективности и простоты конструкции. В качестве такого средства были
ыбраны бортовые раскрывающиеся тормозные щиты, так как они обладают
ысокой эффективностью, имеют простую конструкцию, обеспечивающую,
роме того, почти мгновенное приведение в действие. Преимущество бортовых
аскрывающихся щитов заключается еще и в том, что на их проектирование и
становку не оказывают влияния конструктивные особенности корпуса судна и
го движительно­рулевого комплекса. Такие щиты отличаются тем, что они
значально предназначены для торможения, в то время как многие другие
редства используются, главным образом, по другому назначению, т.е.
орможение является для этих средств дополнительной полезной функцией.
Во второй главе рассматривается экспериментальное исследование
идродинамических характеристик бортовых раскрывающихся тормозных
итов. Приведены программы и методики экспериментальных модельных
сследований в прямом опытовом бассейне, описаны экспериментальные
становки. Модельные испытания проводились в прямом опытовом бассейне
ГАВТ.
Для проведения экспериментов использовалась модель грузового судна
мешанного река­море плавания проекта № 292, имеющая следующие
сновные размерения: масштаб 1 : 35; длина конструктивная 1=3,54 м; ширина
=0,45 м; осадка 7=0,10 м; коэффициент полноты водоизмещения 5=0,848.
іакже были изготовлены модели бортовых раскрывающихся щитов трех
азличных суммарных площадей: большие ­ 50% от площади погруженной
асти мидельшпангоута; средние ­ 40%; малые ­ 30%. Щиты жестко крепились
модели судна. Имелась возможность выставлять любые углы раскрытия
итов с шагом 10 градусов, а также устанавливать щиты в трех положениях по
лине корпуса: в носу, на миделе и в корме.
Эксперименты по исследованию продольной силы на тормозных щитах
роводились методом нулевого момента зарыскивания по следующей
рограмме:
1. Испытания модели без щитов на различных глубинах фарватера.
2. Испытания модели с большими щитами с варьированием места
становки по длине и угла раскрытия на различных глубинах фарватера.
3. Испытания модели со средними щитами с варьированием места
становки по длине и угла раскрытия на различных глубинах фарватера.
4. Испытания модели с малыми щитами с варьированием места
становки по длине и угла раскрытия на различных глубинах фарватера.
7
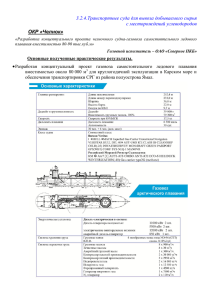
Испытания проходили при следующих значениях относительно!
глубины: /А=77Я=0,2; 0,5; 0,667; 0,769; 0,833 (здесь Я ­ глубина фарватера)
Выставлялись следующие углы раскрытия: 30, 60, 80, 90°. Некоторы
результаты испытаний приведены на рисунках 1,2.
/f
я*,н
•Л'
2г
— щиты на миделе
•— щиты в корме
щиты в носу
20
1В
1ft
14
1 ' /У
:
••
; ­ ••
­
­
12
>V^'
­­
6
;
4
•
: yv* " i
i
10
8
г
і /*
'.//
y y ' |
­г
'<
і
' :
i
•­ ­
­/*•
I
• ­ ­j
^ . . . . . . _.
"LCJ^
u, м/с
2
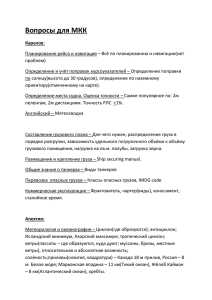
Рисунок 1 ­ Результаты экспериментов по определению сопротивлени
модели с большими щитами, раскрытыми на угол 90° (?/,=0,2), при различно
их установке по длине корпуса.
2.2
2.1
1)4=0,2
2)4=0,5
3) 4=0,667
4) 4=0,769
5) 4=0,833
1.8
1.7
1.6
1.5
/
и
іи
•
'
/
ш
А­/
.­­
і
.•••
"Jfl
4U
5i>
6(1
ѵ и
ж;
w
w
'
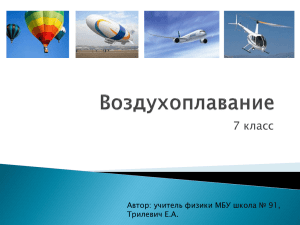
Рисунок 2 ­ Коэффищіент сопротивления тормозных щитов
зависимости от угла раскрытия при фиксированных значениях относительно"
глубины.
Результаты исследований позволили сделать следующие основны
выводы:
­ сопротивление щитов увеличивается при увеличении угла и
раскрытия и достигает наибольшего значения при 90°;
­ с уменьшением площади щитов их сопротивление уменьшается;
­ сопротивление щитов практически не зависит от места их установки п
длине корпуса. Сопротивление модели со щитами на миделе и в носу почти
8
динаково; в случаях установки в носу и на миделе среднеквадратическое
тклонение сопротивлений составляет 0,7 Н, что в процентах от сопротивления
одели со щитами на миделе на скоростях, близких к скорости полного хода,
е превышает 5%;
ограниченная глубина оказывает существенное влияние на
опротивление
щитов.
При
уменьшении
глубины
сопротивление
величивается;
­ при установке щитов на миделе и в корме наблюдалось улучшение
стойчивости модели на курсе.
Для определения поперечной силы, возникающей на тормозном щите, в
рямом опытовом бассейне НГАВТ были проведены экспериментальные
сследования методом нулевого момента. В ходе исследования использовалась
а же модель с установленным на миделе одним тормозным щитом. При этом
арьировался угол раскрытия щита в диапазоне: 10, 20, 30, 40°. Испытания
роходили при тех же значениях глубин, что и в случае определения
іродольной силы на щитах.
Эксперименты проводились по следующей программе:
1. Испытания модели с большим щитом при различных углах раскрытия
а различных глубинах;
2. Испытания модели со средним щитом при различных углах раскрытия
а различных глубинах;
3. Испытания модели с малым щитом при различных углах раскрытия на
азличных глубинах.
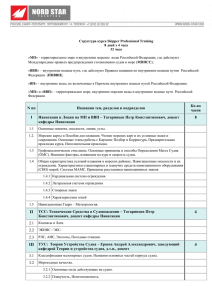
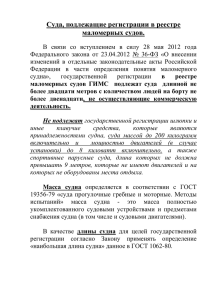
Некоторые результаты испытаний приведены на рисунках 3,4.
Яу,Н
и, м/с
"О
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Рисунок 3 ­ Результаты экспериментов по определению поперечной
илы на большом тормозном щите, установленном на миделе, при различных
глах раскрытия, th = 0,2.
9
A
a„,=40°
,*
<X'
. s'
.<y'
_
.
—
­
—
•
1
а и =30°
y*^
..... .. ^
;*
P­J^
^&~ "*"
=c
aw=20°
!^F"*
°
10
*—
0.2
0.4
0.6
0.8
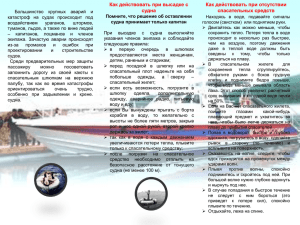
Рисунок 4 ­ График зависимости коэффициента поперечной силы н
тормозном щите от относительной глубины при фиксированных значения
угла раскрытия.
Результаты исследований позволили сделать следующие основны
выводы:
­ при изменении угла раскрытия щита от 0 до 40° поперечная сил
увеличивается;
­ с уменьшением глубины поперечная сила на щите возрастает;
­ уменьшение площади щита приводит к уменьшению поперечной силь
на нем.
С целью оценки эффективности бортовых раскрывающихся щитов ка
средства экстренного торможения судна в прямом опытовом бассейне НГАВ
были проведены самоходные модельные испытания. Для этого вышеописанна
модель грузового теплохода смешанного плавания была оборудована двум
электродвигателями и гребными винтами. Также на модели было установлен
рулевое устройство. Для дистанционного управления моделью использовалас
система радиоуправления, приводившая в действие двигатели и рулево
устройство. Программа испытаний предусматривала определение пут
активного торможения модели без щитов и с малыми тормозными щитами н
миделе, раскрытыми на угол 90° на глубокой воде. Определение координа
модели производилось по мерной линии, нанесенной на одной из стено
бассейна и электронному секундомеру. В результате испытаний установлено,
что модель, оборудованная малыми тормозными щитами на миделе,
раскрытыми на 90°, имеет путь активного торможения на 30% меньше, чем т
же модель без щитов. Таким образом, была еще раз подтверждена высокая
эффективность бортовых раскрывающихся щитов как средства экстренного
торможения судна.
10
В третьей главе приведены разработанные автором методики расчета
продольной и поперечной сил и моментов, возникающих на бортовых
тормозных щитах. С использованием этих методик составлена математическая
модель маневров свободного и активного торможения судна, оборудованного
бортовыми раскрывающимися тормозными щитами.
Математическая модель маневра активного торможения судна,
оборудованного бортовыми тормозными щитами, записывается в следующем
общем виде:
>dv.
{т + Кі)—г~ Кі (<?*Ч + с**о) ~ ™,о> ­ тС^І ­
dt
(і)
­(«+Лі)ад* = ­2>8­ги ­.rr ­ха ­ Ј * й ­ Ј * а ­RXm
(т + l
2 2
) ^
+
^ + ,„vxco ­mC\0C; + Л,,(их ­С^О?
+ q)­
(2)
і=1
;=1
(Л + Х^+К^~
1=1
*к (СХ
+С Ѵ
У У ­ С**ш)
+
+^(и,­с^)(с;­с;)­^(с;­с;)с;­Руис;(с;+с;) =
Mr­Ma+lR
(3)
I X ­ І > ; +1^\+Уо^„,+мщ
Расчет угла курса % и координат центра тяжести в неподвижной системе
координат Хо, уо производится одновременно с определением величин ѵ х, ѵ у и
со, неизвестных в общих уравнениях по следующим дифференциальным
кинематическим уравнениям:
<*Х
dx
dy„
(4)
­f­ =ffl,­­f­a = Dcos(x­P); ^f­ = vsm(x­P) •
dt
dt
dt
В данных формулах обозначено: т ­ масса судна, кг; СЛ<3, С^ ­
проекции скорости течения на неподвижные оси координат в точке,
соответствующей ЦМ судна в отсутствие последнего, м/с; С", Сух Сху, Суу ­
изменения продольной и поперечной составляющих скорости течения вдоль
подвижных осей координат, 1/с; /'•п>^22'^2бДбб ­ присоединенные массы,
присоединенный статический момент и присоединенный момент инерции
подводной части корпуса судна, кг, кг­м, кг­м2; их, ѵ ­ проекции скорости ЦМ
И
судна на подвижные оси координат, м/с; и ­ скорость движения ЦМ судна при
маневрировании, м/с; t ­ время, с; ш ­ угловая скорость судна, с'1; /3 ­ угол
дрейфа в ЦМ судна, рад.; х ' У1"011 курса, рад.; р = 1000 кг/м3 ­ массовая
плотность воды; J!CX,J2 ­ момент инерции погруженного объема относительно
плоскости yGz и момент инерции масс судна относительно оси Gz, кг­м2; х0, уо
­ координаты ЦМ судна в неподвижной системе координат, м; ZP,ZR ­
количество движителей и рулевых комплексов; X3,Y3
­ продольная и
поперечная силы засасывания на корпусе судна от действия I ­го ДРК, Н; Yp ­
стабилизирующая сила на движителе, Н; Тр ­ полный упор / ­ го винта, Н;
XRi, Y^ ­ продольная и поперечная силы на / ­ м рулевом органе, Н; yD ­
расстояние от оси гребного вала до ДП, м; Іц ­ расстояние от ДРК до центра
масс, м; /, ­ плечо силы засасывания, м; АТрі ­ разность между полезными
упорами движителей наружного и внутреннего бортов; Xr,Yr,Mr
­
гидродинамические усилия, действующие на подводную часть корпуса судна,
Н, Н­м; Xa,Ya,Ma ­ аэродинамические усилия, действующие на надводную
часть корпуса, Н, Н­м; RXm, Яущ, Мщ ­ усилия на тормозных щитах.
Гидродинамические усилия на тормозных щитах, входящие в общую
математическую модель определяются по следующим выражениям:
­ для продольных сил
(5)
R^cm^s,y,
где
­2.4<HO­"­4,03l­10 , ­a jWa „ r
(l + /А2Ѵ і.ЛН0'«^^+9,124.10'.**,,„,
(6)
0^ M „^90°;0,2<o,<0,833;
О7)
а
эфф.ш.Х=ащ­Р­
В этих формулах обозначено: Схщ ­ коэффициент продольной силы на
щитах; аЭффекпХ ­ эффективный угол атаки тормозного щита при движении
судна по криволинейной траектории; ащ ­ угол раскрытия тормозного щита;
^хщ ­ суммарная площадь тормозных щитов; /5 ­ угол дрейфа на криволинейной
траектории.
­ для поперечных сил
12
(8)
Rr« = C ^ s y ,
где
С (а
­Л
­6.90­10­ 4 ­«, M ^ + 6,8S­tO­ t ­a^ >mr­
a 3 «™r=90"­a„ ( + /3.
(10)
В этих формулах обозначено: Сущ ­ коэффициент поперечной силы на
ормозном щите; SUf ­ площадь тормозного щита, аЭффекту ­ эффективный угол
атаки тормозного щита при движении судна по криволинейной траектории.
­ для моментов
где Л/,ч = * , „ . , „ ;
(12)
Ущ=^1
л/ Гч = * „ , ­ * * •
(13)
В этих формулах обозначено: Мщ ­ суммарный момент на тормозном
щите; Мхщ ­ момент продольной силы на тормозном щите; Мущ — момент
поперечной силы на тормозном щите; хщ, ущ ­ координаты центра тяжести
іормозного щита по длине и ширине корпуса судна; В ­ ширина судна; Ьщ ­
ширина тормозного щита.
Математическая модель свободного торможения отличается от
риведенной выше модели активного торможения отсутствием в уравнении
продольных сил силы упора движителей, а также наличием силы
сопротивления движителей и их присоединенных масс.
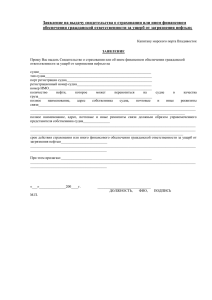
По составленной математической модели были проведены расчеты
азличных маневров теплохода смешанного река­море плавания. На рисунке 5
приведены результаты расчета маневра свободного торможения теплохода
проекта № 292 с одним раскрытым на 90° тормозным щитом площадью 15% от
площади погруженной части миделя, на глубокой воде, при отсутствии ветра и
іечения.
Четвертая глава посвящена разработке нормирующего критерия
опустимого пути активного торможения судов смешанного река­море
плавания.
В начале главы произведен обзор существующих в литературе и
нормативных документах подходов к нормированию инерционных качеств
судов. Во всех рассмотренных способах в качестве нормируемой величины
выступает путь активного торможения. Но в большинстве способов
рассматривается ситуация движения судна по прямолинейной траектории на
еограниченном водном пространстве.
13
О
100
200
300
400
500
600
700
800
900
1*10Э
Рисунок 5 ­ Траектория движения судна проекта № 292 при маневре
свободного торможения на глубокой воде, при отсутствии ветра и течения, с
одним раскрытым тормозным щитом.
Такой подход к нормированию далеко не полностью отражает
специфику работы судов смешанного плавания, совершающих длительные
переходы в стесненных условиях внутренних водных путей. Кроме того,
допустимые пути активного торможения, определяемые в соответствии с
существующими критериями и нормами, оказываются чрезмерно большими
применительно к условиям внутренних водных путей и стесненным морским
фарватерам.
Таким образом, автор считает целесообразным разработку критерия
допустимого пути активного торможения судов смешанного плавания
применительно к случаю движения судна по криволинейным участкам водных
путей с ограниченной шириной фарватера.
Актуальность такой постановки задачи подтверждается высоким числом
аварийных случаев, происшедших с судами именно на криволинейных
участках внутренних водных путей, а также результатами опроса
судоводителей, определивших прохождение поворотов как один из самых
сложных маневров.
Схематизация поставленной задачи приведена на рисунке 6.
При движении по криволинейному участку у судна выходит из строя
рулевое устройство (точка А, рисунок 6); наиболее вероятно, что руль в этот
момент будет находится переложенным на некоторый угол на тот борт, в
сторону которого осуществляется поворот; поэтому дальнейшая траектория
движения судна с большой вероятностью будет находится в пределах сектора,
ограниченного отрезками / ; и 12. Отрезки // и 12 являются предельно
возможными траекториями движения судна.
14
Рисунок 6 ­ К определению критерия допустимого пути активного
горможения.
Длины отрезков определяются следующим образом: /, = ^Rnb +
1? = лІК„Ь
,
. Отсюда видно, что длина отрезка /^ будет всегда меньше, чем
/. Таким образом, в качестве нормирующего критерия должен использоваться
трезок 12.
Исходя из этого, окончательно получаем выражение критерия пути
ктивного торможения судна при его движении по криволинейному фарватеру:
/=
(14)
S...
Использование данного критерия для повышения безопасности плавания
озможно при определении безопасной скорости вхождения судна в поворот.
ак известно, пренебрежение безопасной скоростью является причиной
громного числа аварийных случаев. При этом не существует количественных
'ритериев выбора безопасной скорости.
В данной работе получено следующее выражение для определения
езопаснои скорости вхождения в поворот с использованием полученного
ритерия допустимого пути активного торможения (14) и упрощенного метода
.Г. Павленко:
Сц&Е
+М
+
CU2G,E
+ М
,I^G2E
15
, Vh.G­iE
С1­1 +
C2GE­C2G,E
(15)
В данной формуле обозначено: Gh G2, fr — эмпирически
коэффициенты; tj ­ период реверса движителей, с; Е ­ модуль инерционности
м; и0„ ­ скорость полного переднего хода судна на глубокой воде, м/с; С
скорость течения, м/с.
Как видно, расчеты по данной формуле не сложны, но требую
некоторых затрат времени. Чтобы дать возможность быстрого определени
безопасной скорости в условиях ходового мостика необходимо предоставит
судоводителю диаграмму, построенную с использованием данной формулы.
Пример такой диаграммы приведен на рисунке 7.
ѵ
v..­­
f. =400 л
^
' ><*,•^A
0
' 's • A
A As'
•
/у
ш
S
_„­'
Г'/
/
^s
у'
,
•
, s
~s­
J*~
._•'•
^. ­ ­ "
.­­•
•
A .­­' ,
%А,'
$tf,V­',
.
s~
••­по
­^ГА;
AA­
/.А
ѵ , м/с
** ­­AA *^\^'^.
A^­J. ­­"Т.­ ­
S
= 100 M
v /
11/
•'
А
4=75
\=5(
n, об/мин
^
M
­
M
­
­
R„,M
Рисунок 7 ­ Диаграмма для определения безопасной скорости вхождени
в поворот для теплохода проекта № 292.
Таким образом, зная радиус поворота R„ и ширину фарватера Ъ, можн
определить безопасную скорость вхождения судна в поворот или обороть
движителей, обеспечивающие эту скорость. Такая диаграмма может быт
построена для любого судна и размещена на ходовом мостике.
Другим аспектом повышения безопасности плавания являете
улучшение инерционных характеристик уже существующих судов. Одним и
самых эффективных средств экстренного торможения, как было показано
главах 1 и 2, являются бортовые раскрывающиеся щиты. С использование
16
ритерия допустимого пути активного торможения / (14) и упрощенного
етода В.Г. Павленко было получено выражение для определения
ишшальной необходимой площади тормозных щитов такой, чтобы судно
югло быть остановлено в пределах допустимого расстояния / при следовании
іо криволинейному участку со скорости полного хода при помощи маневра
ктивного торможения. Выражение имеет следующий вид:
2D
s
<[CG> (W*,+C) + G2(t4»l, ­С1)]
Cxu<pgul{l­Ctl­^v^)
& ­ьС^
СІЩ
В данной формуле обозначено: Д. ­ весовое водоизмещение судна, Н; Q
площадь смоченной поверхности судна, м2; g ­ ускорение свободного
адения, м/с2; Q, Qw— коэффициенты вязкостного и волнового сопротивления;
\щ ~ коэффициент сопротивления тормозных щитов.
Результаты расчетов, выполненных по данному выражению для ряда
удов смешанного плавания и одного из затруднительных поворотов реки
ртыш, показали адекватность применения формулы (16) к судам данного
ипа.
Заключение. Основные результаты выполненной работы:
1. Проведен анализ предложенных ранее способов улучшения
шерционных характеристик судов, и, на его основе, выполнена
кспериментальная проверка эффективности бортовых раскрывающихся щитов
ак средства экстренного торможения.
2. Проведены систематические экспериментальные исследования в
пытовом бассейне НГАВТ по определению продольной и поперечной сил на
ормозных щитах.
3. Проведены экспериментальные исследования в опытовом бассейне
ГАВТ по определению инерционных характеристик модели судна
мешанного плавания, оборудованной бортовыми тормозными щитами,
азработан способ расчета минимальной потребной площади бортовых
ормозных щитов, необходимой для экстренной остановки судна в пределах
риволинейного фарватера.
4. Разработана методика определения коэффициентов продольной и
•оперечной сил и их моментов на тормозных щитах;
5. Составлена математическая модель торможения судна с одним и
вумя раскрытыми тормозными щитами.
6. Выработан критерий нормирования пути активного торможения судна
іри движении по криволинейному фарватеру, проведены расчеты,
•оказывающие адекватность предложенного критерия применительно к судам
мешанного плавания.
7. Разработан способ расчета безопасной скорости вхождения судна в
оворот и построена диаграмма для оперативного определения безопасной
17
скорости судна при вхождении и следовании по криволинейным участкаіѵ
водных путей.
Основные положения диссертации отражены в следующі
публикациях:
1. Бобровский, Д.И. К вопросу о нормировании пути активног
торможения судов смешанного плавания / Бобровский Д.И. // Судовождение
2006 / Сб. науч. тр. НГАВТ. ­ Новосибирск, 2006. ­ С. 134­137.
2. Бобровский, Д.И. О нормировании пути активного торможения судо
смешанного река­море плавания при следовании по изгибу фарватера
Бобровский Д.И. // Судовождение­2006 / Сб. науч. тр. НГАВТ. ­ Новосибирск
2006.­С. 138­144.
3. Бобровский, Д.И. Определение площади тормозных щитов с учетом
характеристик поворота реки при использовании маневра активног
торможения судна / Бобровский Д.И. // Научные проблемы транспорта Сибир
и Дальнего Востока. ­ Новосибирск, 2007. ­ №1. ­ С. 74­ 76.
4. Бобровский, Д.И. О выборе безопасной скорости судна при вхождении
в поворот / Бобровский Д.И. // Научные проблемы транспорта Сибири
Дальнего Востока. ­ Новосибирск, 2007. ­ №1. ­ С. 77­ 79.
5. Бобровский, Д.И. Экспериментальное исследование зависимости
коэффициента сопротивления бортовых тормозных щитов от угла і
раскрытия на различных глубинах / Бобровский Д.И. // Научные проблемь
транспорта Сибири и Дальнего Востока. ­ Новосибирск, 2008. ­ №1. ­ С. 137
139.
6. Бобровский, Д.И. О нормировании пути активного торможения судо
смешанного река­море плавания при следовании по изгибу фарватера / Салене
В.В., Вьюгов В.В., Бобровский Д.И. // Судовождение­2008 / Сб. науч. тр
НГАВТ. ­ Новосибирск, 2008. ­ С. 55­58.
7. Бобровский, Д.И. Выбор безопасной скорости судна при движении п
криволинейным участкам водных путей / Бобровский Д.И. // Материаль
науч.­техн. конф. профессорско­преподавательского состава НГАВТ «Водны"
транспорт России вчера, сегодня, завтра» ­ Новосибирск, 2009.
18
Подписано в печать 20.05.2009,
Бумага офсетная №1, формат 60x84 1/16, печать трафаретная ­Riso.
Усл. печ . л. 1,0. Тираж 100 экз. Заказ № 47.
Издательство ФГОУ ВПО «Новосибирская государственная
академия водного транспорта (НГАВТ)»
630099, Новосибирск, ул. Щетинкина, 33