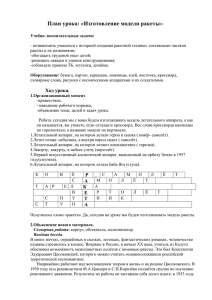
САНКТ-ПЕТЕРБУРГСКИЙ ГОРНЫЙ УНИВЕРСИТЕТ Военная кафедра Г.В. РУДИАНОВ Устройство и эксплуатация ПЗРК 9К38 Боевые средства ПЗРК 9К38 Учебные материалы Санкт-Петербург 2017 УДК 623.418.2:621.396.967 (075,8) БВК (6855):32.95 Радиолокационные станции Р 832 В учебных материалах «Устройство и эксплуатация ПЗРК 9К38. Часть I. Боевые средства ПЗРК 9К38» приведены назначение, состав, и боевые возможности ПЗРК 9К38. Изложены назначение, состав, технические характеристики и устройство ЗУР 9М39. Подробно рассмотрено устройство и принцип действия составных частей ЗУР 9М39: оптическая головка самонаведения 9Э410, устройство выработки команд, автопилот, рулевой отсек, боевая часть, двигательная установка. Изложено устройство и принцип действия пусковой трубы, пускового механизма, наземного блока питания, а также средств целеуказания и связи. Учебные материалы снабжены большим количеством рисунков, схем и иллюстраций, что повышает наглядность учебного материала. Учебные материалы предназначены для студентов военной кафедры, изучающих ПЗРК 9К38. Учебные материалы могут быть полезны студентам при изучении военнопрофессиональной учебной дисциплины «Стрельба и боевая работа на ПЗРК 9К38», а также преподавателям при подготовке к занятиям по данной дисциплине для лучшего понимания физического смысла операций, проводимых при боевой работе на ПЗРК 9К38. 2 Введение В соответствии с диалектическим законом единства и борьбы противоположностей развитие средств воздушного нападения обуславливает совершенствование зенитных средств, среди широкого спектра которых одним из перспективных направлений являются переносные зенитные ракетные комплексы (ПЗРК). Основным достоинством ПЗРК по сравнению с возимыми комплексами являются: малые габариты и масса, что позволяет стрелку-зенитчику переносить комплекс на себе, а также предопределяет высокую мобильность и незаметность. Немаловажными факторами являются простота эксплуатации боевых средств комплекса в войсках и относительно низкая стоимость изготовления. Существенное достоинство ПЗРК, особенно проявляющееся в условиях интенсивного радиоэлектронного противодействия, – это его радиоэлектронная скрытность, обусловленная пассивным принципом действия (ПЗРК излучает только при включении аппаратуры радиолокационного опознавания «свой-чужой» перед пуском на несколько секунд). В то же время ПЗРК обладает существенным недостатком – зависимостью боевого применения от метеоусловий, освещенности, запыленности и т.д. Относительная простота конструкции комплекса (по сравнению с радиолокационными комплексами) определяется оптическим (тепловым) принципом построением головки самонаведения, однако, этот же принцип обуславливает малую дальность действия ПЗРК (не превышающую 5-6 км). Дело в том, что на бо́льших дальностях уровень теплового излучения цели становится соизмеримым с уровнем фона, что не позволяет головке надежно захватить цель на сопровождение, причем, увеличение чувствительности фотоприемника увеличивает амплитуду как полезного сигнала, так и фона, поэтому отношение «сигнал/шум» не увеличивается. Вследствие особенностей принципа действия и конструкции ПЗРК нашли широкое применение для борьбы с низколетящими целями на малых дальностях. Для успешного выполнения боевой задачи командир взвода должен умело, уверенно и быстро ориентироваться в сложной быстроменяющейся тактической обстановке, принимать верные решения. Поэтому офицеру, эксплуатирующему современный ПЗРК, необходимо глубоко понимать принципы действия комплекса, процессы, происходящие в аппаратуре при выборе того или иного режима. Военно-профессиональная учебная дисциплина «Устройство и эксплуатация ПЗРК 9К38» базируется на знаниях, полученных при изучении военнопрофессиональной учебной дисциплины «Основы построения зенитных ракетных комплексов» и является основой для изучения военно-профессиональной учебной дисциплины «Стрельба и боевая работа на ПЗРК 9К38». Учебные материалы составлены в соответствии с учебной программой изучения военно-профессиональной учебной дисциплины «Устройство и эксплуа3 тация ПЗРК 9К38» и предназначены для изучения устройства ПЗРК 9К38 и порядка его эксплуатации. В учебных материалах приведены назначение, состав, и боевые возможности ПЗРК 9К38. Изложены назначение, состав, технические характеристики и устройство ЗУР 9М39. Подробно рассмотрено устройство и принцип действия составных частей ЗУР 9М39: оптическая головка самонаведения 9Э410, устройство выработки команд, автопилот, рулевой отсек, боевая часть, двигательная установка. Изложено устройство и принцип действия пусковой трубы, пускового механизма, наземного блока питания, а также средств целеуказания и связи. Настоящие учебные материалы содержат 3 главы. В первой главе изложены общие сведения о переносном зенитном ракетном комплексе 9К38. Приведены назначение, состав, и боевые возможности комплекса. Во второй главе приведено устройство и функционирование боевых средств ПЗРК 9К38. подробно рассмотрен принцип выделения сигнала ошибки из теплового сигнала цели, а также принцип формирования команды управления на основе сигнала ошибки. Показана возможность применения одноканальной системы управления для наведения ракеты в двух плоскостях. Рассмотрен принцип защиты головки от ложной тепловой цели. Изложен физический смысл и техническая реализация режима «Вдогон». Приведен принцип работы наземного радиолокационного запросчика. Третья глава посвящена устройству и функционированию средств целеуказания и связи. Приведено описание конструкции и принципа действия переносного электронного планшета 1Л15, а также носимых и возимых радиостанций. В конце каждой главы предлагаются контрольные вопросы для усвоения материала. Учебные материалы предназначены для студентов военных кафедр ВУЗов, изучающих дисциплину «Устройство и эксплуатация ПЗРК 9К38», а также для преподавателей, проводящих занятия по данной дисциплине. 4 Глава 1. ОБЩИЕ СВЕДЕНИЯ О ПЕРЕНОСНОМ ЗЕНИТНОМ РАКЕТНОМ КОМПЛЕКСЕ 9К38 «ИГЛА» 1.1. ОБЩИЕ СВЕДЕНИЯ О ПЕРЕНОСНОМ ЗЕНИТНОМ РАКЕТНОМ КОМПЛЕКСЕ 9К38 «ИГЛА» Назначение, состав, и боевые возможности ПЗРК 9К38 Переносной зенитный ракетный комплекс 9К38 «Игла» предназначен для поражения всех типов визуально видимых целей, являющихся источниками теплового излучения. Комплекс способен обстреливать воздушные цели, летящие навстречу со скоростями до 360 м/с, а также вдогон, летящих со скоростями до 320 м/с, в условиях естественных помех, а также в условиях организованных высокотемпературных помех типа ложная тепловая цель (ЛТЦ). ПЗРК являются эффективным средством непосредственного прикрытия общевойсковых и других подразделений и отдельных малоразмерных объектов (командных пунктов, стартовых и огневых позиций, аэродромов, мостов, переправ и т. п.) от ударов воздушного противника. ПЗРК просты в эксплуатации, обладают высокой мобильностью и возможностью применения во всех видах боя и боевой деятельности войск, когда применение других средств ПВО ограничено или практически исключено (при действиях в труднодоступной болотистой, лесистой и горной местностях). В бою ПЗРК обслуживается одним человеком − стрелком-зенитчиком. Стрельба комплексом производится с правого плеча стрелка-зенитчика из положения "стоя" или "с колена" с открытой, обеспечивающей обзор воздушного пространства, позиции. Комплекс позволяет производить пуск ракеты из окопа, с позиций, занимаемых на воде, болотистой местности, с объектов бронетанковой техники, движущихся по ровной местности со скоростью не более 20 км/ч, а также с автомашины с места или с короткой остановки. Комплекс позволяет производить пуск ракеты стрелком-зенитчиком в индивидуальных средствах защиты. Комплексы обеспечивают ведение стрельбы в ручном или автоматическом режимах пуска ракет. Автоматический режим является основным при пусках по всем видам целей как навстречу, так и вдогон. Ручной режим пуска используется, в основном, при обстреле малоскоростных и неподвижных (зависающих) целей. ПЗРК «Игла» включает в себя: боевые средства; средств приема целеуказания и связи средства технического обслуживания учебно-тренировочные средства. 5 1. Боевые средства в составе: зенитной управляемой ракеты ЗУР 9М39 в пусковой трубе (ПТ) 9П39, в которую она снаряжается на заводе и в войсках не извлекается; пускового механизма (ПМ) 9П516-1 (с НРЗ 1Л14); наземного источника питания (НИП) 9Б238. 2. Средств приема целеуказания и связи в составе: переносной электронный планшет 1Л15; переносные радиостанции Р-147, Р-162, Р-163 и радиоприемники Р147П. 3. Средства технического обслуживания в составе: подвижного контрольного пункта (ПКП) 9В866; контрольно-проверочной аппаратуры (КПА) 9Ф917; дополнительной КПА 9В912 (для проверки НРЗ 1Л14); дополнительной КПА 9В926 (для проверки ПЭП 1Л15). 4. Учебно-тренировочные средства в составе: унифицированного тренажера 9Ф624М; полевого тренажера 9Ф635; учебно-тренировочного комплекта 9Ф663; комплекта контроля пуска 9Ф636; тренировочно-практического комплекта 9Ф634; габаритно-весового макета 9К38 «Макет»; разрезного макета 9К38-Р; комплекта электрифицированных стендов 2У38. Боевые возможности комплекса 9К38 «Игла» характеризуются способностью комплекса поражать воздушную цель в различных условиях обстановки и определяются: разведывательными возможностями; огневыми возможностями; маневренными возможностями. Разведывательные возможности определяются способностью средств разведки ПЗРК по обнаружению и опознаванию целей с заданной вероятностью, а также возможностью по их сопровождению и выдаче целеуказания. 1. Дальность обнаружения воздушных целей: с использованием ПЭП, км 25,6; с использованием бинокля, км 6-12; с использованием ПНВ, км 2; невооруженным глазом, км 6-8. 2. Дальность опознавания с использованием НРЗ 1Л14, км 5. разрешающая способность опознавания по дальности, км 3,6. 3. Вероятность обнаружения целей на дальности до 10 км 0,7. 6 4. Количество одновременно выдаваемых ЦУ и сопровождаемых целей с помощью ПЭП 1Л15 4. Огневые возможности определяются способностью ПЗРК поражать цель в различных условиях обстановки. 1. Параметры зоны поражения: Максимальная высота поражаемых целей, м Минимальная высота, м Наклонная дальность, м Курсовой параметр, м на встречных курсах до 3000 на догонных курсах до 3500 10 500-4500 2000 10 800-5200 3000 Hmax = 3500 H, м Hmax = 3000 D ma x 200 =5 D m ax n D mi =8 = 450 На встречном курсе На догонном курсе 0 00 Hmin = 10 Dmin = 500 D, м Рис. 1. Сечение зоны поражения в вертикальной плоскости Z, м На догонном курсе На встречном курсе Р = 3000 Р = 2000 D, м Рис. 2. Сечение зоны поражения в горизонтальной плоскости 2. Скорости поражаемых целей, м/с на встречных курсах до 360; 7 на догонных курсах до 320. 4. Количество одновременно обстреливаемых целей 1. 5. Цикл стрельбы, с 40-45. 6. Время реакции комплекса, с 8-10. 7. Боекомплект (ЗУР/на один ПМ) 2. 8. Минимальный временной интервала между пусками ЗУР, с 0,5. 9. Обеспечивается возможность ведения огня с короткой остановки и в движении (со скоростью не более 20 км/ч). Маневренные возможности Маневренные возможности комплекса определяются: массой комплекса в походном и боевом положениях; возможностями транспортирования (виды транспорта, максимальная дальность перемещения, нормы погрузки и т.п.); временными параметрами комплекса (время перевода комплекса и его элементов из походного положения в боевое и обратно, время готовности к работе и т.п.). Маневренные возможности комплекса представлены в табл. 1. Таблица 1. Масса комплекса, кг: в походном положении в боевом положении Масса элементов комплекса, кг: ракеты в трубе пускового механизма наземного блока питания Масса штатной укупорки, кг: с ЗУР и НБП с пусковым механизмом и ЗИП Время перевода комплекса из походного положения в боевое, с Время выхода на режим НБП, с Время готовности ракеты к пуску после выхода на режим НБП, с Время предварительной подготовки стрельбы, с Время непосредственной подготовки стрельбы, с Способы транспортирования: воздушным транспортом водным транспортом железнодорожным транспортом автотранспортом и БТР-60ПБ, км парашютное десантирование 20,0 18,0 13,7 3,0 1,3 68 7,6 13 1,0-1,3 5 43-70 14-18 без ограничений без ограничений без ограничений с высоты 5000 м Все модификации отечественных ПЗРК разработаны конструкторским бюро машиностроения Российской Федерации (КБМ РФ), г. Коломна. Первый образец ПЗРК принят на вооружение в 1968 г. Зенитная управляемая ракета (ЗУР) 9М32 этого комплекса, как и ЗУР последующих модификаций, 8 построена по аэродинамической схеме "утка" с одноканальным рулевым приводом, работающем в релейном режиме. В комплексе реализована пассивная система самонаведения. По информации с тепловой головки самонаведения (ТГСН) ЗУР наводится на цель по методу пропорционального наведения, обеспечивающим формирование команд управления полетом ЗУР по величине и направлению вектора угловой скорости линии визирования ракета-цель. Задачи предстартовой подготовки ЗУР к пуску и безопасный пуск ракеты в этом комплексе решались пусковым механизмом 9П53 и пусковой трубой. В последующие годы проведены ряд усовершенствований, что позволило улучшить помехоустойчивость ОГСН, увеличить дальнюю и верхнюю и уменьшить нижнюю границы зоны поражения и увеличить среднюю скорость полета ЗУР, повысить эффективность обстрела целей в сложной фоновой обстановке и т.д. В результате проведенных модификаций разработан и принят на вооружение в 1983 г. ПЗРК 9К38. Данный комплекс имеет следующие конструктивные особенности, обуславливающие его ТТХ: 1). Наличие наземного радиолокационного запросчика (НРЗ) 1Л14-1 исключает возможность обстрела целей, отвечающих правильным кодом («свой»). 2). Установка перед обтекателем ТГСН аэродинамического насадка позволила уменьшить лобовое сопротивление ракеты, а применение отделяемого стартового (выбрасывающего) двигателя ракеты (который остается в пусковой трубе) позволило уменьшить полетную массу ракеты. Данные факторы позволили увеличить среднюю скорости полета ЗУР, расширить скоростной диапазон поражаемых целей и увеличить дальнюю границу зоны поражения. 3) Наличие порохового управляющего двигателя (ПУД), установленного в рулевом отсеке ракеты и управляемого схемой управления на начальном участке полета, позволило обеспечить газодинамический разворот ракеты после ее вылета из трубы на требуемые углы упреждения и возвышения. Это обеспечило уменьшение ближней границы зоны поражения. 4). Введение в состав УВК схемы ближней зоны и схемы смещения обеспечило необходимую точность наведения ЗУР на конечном участке полета и повышение эффективности поражения. Схема ближней зоны начинает работать за 500-600 м до цели и увеличивает крутизну модуляционной характеристики СКЦ ТГСН. Схема смещения, включаемая схемой ближней зоны, формирует сигналы управления, смещающие траекторию полета ЗУР от среза сопла в центр планера цели. 5). Наличие во взрывательном устройстве двух контактных датчиков цели (КДЦ) – магнитного вихревого и магнитного индукционного. Магнитный вихревой датчик является основным и срабатывает при преодолении боевым отсеком металлической преграды или рикошете от нее с выдачей сигнала на срабатывание детонатора боевой части без задержки. Магнитный индукционный генератор 9 является дублирующим и срабатывает при ударе ракеты о цель (с относительной скоростью сближения не менее 80 м/с) с выдачей сигнала на срабатывание детонатора боевой части с некоторой задержкой, необходимой для срабатывания основного КДЦ. Это повышает надежность срабатывания взрывательного устройства. 6). Наличие в боевой части взрывного генератора обеспечивает подрыв остатков топлива двигательной установки при срабатывании детонатора, что повышает эффективность поражения цели. 7) Автомат разарретирования и пуска (АРП), размещенный в пусковом механизме, разрешает пуск ракеты только в случае надежного сопровождения цели, что обеспечивает уменьшение расхода ЗУР. 9). В головке самонаведения приняты меры, обеспечивающие помехоустойчивость к организованным высокотемпературным помехам типа «ложная тепловая цель» (ЛТЦ). Повышение помехоустойчивости ОГСН достигнуто за счет использования двух фотоприемников – основного (ФП ОК) и вспомогательного (ФП ВК) каналов, максимумы спектральной чувствительности которых соответствуют различным длинам волн. ФП ВК имеет максимум спектральной чувствительности в диапазоне длин волн излучения 1,8-3 мкм, что соответствует спектральной плотности излучения помех типа ЛТЦ. Охлаждаемый до – 200°С (73°К) ФП ОК имеет максимум спектральной чувствительности в диапазоне длин волн излучения 3,5-5,0 мкм, что соответствует спектральной плотности излучения газовой струи реактивного двигателя. Разделение лучистого потока по каналам производится спектроразделительным фильтром. Общая характеристика элементов комплекса Боевые средства (рис. 1) комплекса являются главной составной частью ПЗРК 9К38 «Игла» и предназначены для поражения средств воздушного нападения. Боевые средства комплекса включают: ЗУР 9М39 в пусковой трубе 9П39; пусковой механизм 9П516 с НРЗ 1Л14-1; наземный блок питания 9Б238, включающий электробатарею и баллон с азотом. 10 Рис. 1. Боевые средства ПЗРК 9К38 «Игла» В процессе эксплуатации ракета находится в пусковой трубе и покидает ее только при пуске. Пусковая труба 9П39 является укупоркой при хранении и направляющей при пуске. Передний и задний торцы трубы закрыты легкосъемными резиновыми крышками. На трубе закреплены передняя и задняя стойки прицела, механизмы бортразъема, крепления НБП и ПМ, электрический разъем для подсоединения ПМ. Пусковой механизм предназначен для подготовки к пуску и осуществления пуска ракеты (нажатием пускового крючка). К нижней крышке ПМ крепится НРЗ 1Л14-1, выполненный в виде отдельного блока. На корпусе НРЗ имеется светодиод, сигнализирующий о неисправности НРЗ. Под крышкой НРЗ расположены переключатели кодов АМИ, ГИ, устанавливаемые в положения, соответствующие действующему расписанию. 11 Фотоприемник ВК Оптическая система с роторомгироскопом Рулевая машинка БЧ Фоториемник ОК ПИМ Система охлаждения Двигательная установка БИП ея тар Ба ПТ Пусковой крючок АРП АР РР РП НРЗ 1Л14 НАКОЛ Антенна НРЗ А 0,8 с ПУД ПМ з от ПАД Неиспр НАКОЛ ОДН ИСХ Рис. 2. Структурная схема боевых средств ПЗРК «Игла» При принятии решения на обстрел визуально наблюдаемой цели стрелокзенитчик путем поворота рычага накола НБП в положение НАКОЛ приводит в действие НБП 9Б238. Хладагент с баллона поступает в охлаждающее устройство ТГСН и в механизм накола батареи, которая выходит на режим и запитывает напряжением элементы трубы, электронный блок ПМ и ТГСН. Происходит разгон ротора гироскопа и его арретирование на 5°, которое заключается в наклоне оптической оси следящего координатора на 5° ниже оси трубы (или, что то же самое, на 5° выше линии прицеливания) – для запоминания уровня фона. Стрельба ПЗРК возможна в режимах «Автомат» и «Ручной». Тот или иной режим выбирается нажатием пускового крючка, который имеет три положения: исходное положение – арретированное (АР), среднее положение – разрешено разарретирование (РР), положение до упора – разрешен пуск (РП). После нажатия пускового крючка (до любого положения) происходит арретирование на 10° (на 10° ниже оси трубы), т.е. оптическая ось следящего координатора совмещается с линией прицеливания. В режиме «Автомат» после прицеливания пусковой крючок ПМ нажимается сразу до упора. Ротор гироскопа разарретируется и появляется световая (лампа на задней стойке прицела) и звуковая (телефон в ПМ) индикация. 12 Пуск ракеты в режиме «Автомат» возможен, если в течение 0,8 с после нажатия на пусковой крючок будут выполнены следующие условия: сигнал от цели и фона превышает сигнал от фона не менее чем в четыре раза; ТГСН надежно удерживает в поле зрения цель, имеющую угловую скорость не менее 4 град/с; угол между оптической осью гироскопа и линией прицеливания трубы не превышает 2°; угловая скорость линии визирования не превышает 12 град/с; цель не отвечает на запрос НРЗ. При выполнении этих условий АРП выдает сигнал на электровоспламенитель ПАД. Через 0,72 с (время выхода на режим бортовых источников энергии) напряжение подается на электровоспламенитель стартового двигателя, который срабатывает и выбрасывает ракету из трубы со скоростью 28 м/с, придавая ей вращение относительно продольной оси до 20 об/с. При движении ракеты по трубе происходит срезание трубки подвода хладагента к ТГСН, расстыковка ракеты с вилкой бортразъема трубы и обрыв проводов контактной сети двигательной установки. Стартовый двигатель заканчивает работу в трубе и останавливается в ней с помощью улавливающей втулки и разжимного кольца. Форсом пламени стартового двигателя поджигается лучевой воспламенитель замедленного действия, установленный в маршевом двигателе. При вылете ракеты из трубы происходит раскрытие рулей, пластин дестабилизаторов и крыльевого блока. Режим «Ручной» включается переводом пускового крючка в среднее положение. При этом ротор гироскопа разарретируется, при наличии сигнала от цели появляются световая и звуковая индикация. Автомат разарретирования и пуска (АРП) в течение 0,6 с производит анализ сигнала от цели: сигнал от цели и фона больше сигнала от фона не менее чем в четыре раза; СКЦ надежно удерживает цель, имеющую скорость не менее 4 град/с; угол между оптической осью гироскопа и линией прицеливания трубы должен быть не более 2°; угловая скорость линии визирования меньше 12 град/с. При положительных результатах анализа выдается сигнал на НРЗ, который производит опознавание цели. Если цель не отвечает на запрос НРЗ ("чужой"), через 0,2 с информация об этом поступает с НРЗ на АРП. При нажатии на пусковой крючок до упора АРП выдает напряжение поступает на электровоспламенитель ПАД и далее процесс протекает аналогично режиму «Автомат». В случае потери цели ротор гироскопа ТГСН автоматически арретируется в обоих режимах пуска. 13 Если по запросу НРЗ цель отвечает правильным кодом ("свой"), то в обоих режимах АРП выдает запрет на пуск, о чем свидетельствует прерывание сигналов звуковой и световой индикации с частотой 12,5 Гц, которое продолжается до возвращения пускового крючка в исходное положение. Через 0,33-0,5 с после срабатывания стартового двигателя (на удалении не менее 5,5 м от стрелки-зенитчика) срабатывает маршевый двигатель, ракета разгоняется до маршевой скорости, которая поддерживается в полете за счет второго режима (горение топлива по меньшей площади) работы двигателя. Поддержание скорости вращения ракеты относительно продольной оси обеспечивается за счет наклона пластин крыльев и дестабилизаторов относительно продольной оси ракеты. При вылете ракеты из трубы раскрываются рули, подается напряжение на электровоспламенители порохового управляющего двигателя и взрывательного устройства. При срабатывании электровоспламенителя взрывательного устройства вступает в работу предохранительно-исполнительный механизм (ПИМ), ступени которого последовательно снимаются в процессе полета и ПИМ взводится на удалении около 180 м от стрелки-зенитчика. При срабатывании ЭВ порохового управляющего двигателя (ПУД) воспламеняется заряд ПУД, пороховые газы которого осуществляют управление ракетой на начальном участке траектории полета и разворот ракеты для придания ей необходимых углов упреждения и возвышения. В процессе слежения за целью ТГСН вырабатывает сигнал управления, который поступает на рулевую машинку, обеспечивающую управление ракетой в полете. При встрече ракеты с целью срабатывают контактные датчики цели взрывательного устройства, от которых срабатывает боевая часть. Детонационный импульс через трубку взрывателя передается к заряду взрывного генератора, от которого происходит подрыв остатков топлива двигательной установки. При промахе ракеты (по истечении 14-17 с) происходит ее самоликвидация. Средства связи и целеуказания комплекса 9К38 предназначены для боевого обеспечения боевых средств ПЗРК. Средством целеуказания является переносной электронный планшет 1Л15 (рис. 2). Связь организуется при помощи радиостанций Р-147, Р-147П, Р-162-01, Р-163-0,5Р. 14 Рис. 3. Средства приема целеуказания и связи комплекса 9К38 В состав СОСН 9С520 входят: • приборы ночного видения (ПНВ) 1ПН72; • переносной электронный планшет (ПЭП) 1Л110–1; • индивидуальные средства целеуказания (ИСЦ) 9С520.01. Целераспределение стрелкам-зенитчикам производит командир отделения на основе анализа воздушной обстановки, наблюдая её на экране индикатора ПЭП и выдавая адресное целеуказание посредством набора данных (№ стрелказенитчика, № цели) на клавишной панели ПЭП 1Л110–1. Рис. 4. Средства обеспечения стрельбы ночью (СОСН) 9С520 15 Средства технического обслуживания комплекса 9К38 «Игла» предназначены для текущего обслуживания и регламентных работ с боевыми средствами ПЗРК. Средства технического обслуживания комплекса включают подвижный контрольный пункт (ПКП) 9В866 (рис. 5) и контрольно-проверочную аппаратуру 9Ф719. Рис. 5. Подвижный контрольный пункт (ПКП) 9В866 и контрольнопроверочная аппаратура (КПА) 9Ф719 Учебно-тренировочные средства (рис. 6) комплекса 9К38 «Игла» предназначены для обучения стрелков-зенитчиков правилам боевой работы на ПЗРК и приобретения практических навыков в обращении с ним. Они включают в себя: полевой тренажер 9Ф635, учебно-тренировочный комплект 9Ф663 и унифицированный тренажер 9Ф624. Рис. 6. Учебно-тренировочные средства В походном положении боевые средства комплекса переносятся на плечевом ремне за спиной. Пуск ракеты производится с плеча из положения стоя или с колена с открытой позиции, обеспечивающей обзор воздушного пространства. Комплекс также позволяет производить пуски из окопа, с позиции занимаемой на воде и болотистой местности, с бронетанковой техники и автомобилей, 16 движущихся по ровной местности со скоростью не более 20 км/ч, пуск ракеты может производиться стрелком-зенитчиком в индивидуальных средствах противохимической защиты. Обслуживание комплекса с помощью ПКП 9В866 осуществляется силами специализированного расчета. Глава 2. УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ БОЕВЫХ СРЕДСТВ ПЗРК 9К38 2.1. УСТРОЙСТВО ЗУР 9М39 1. НАЗНАЧЕНИЕ, СОСТАВ, ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЗУР 9М39 Зенитная управляемая ракета 9М39 предназначена для поражения воздушной цели. Функционально ЗУР состоит из: планера; реактивного двигателя; аппаратуры наведения; автопилота; бортового источника электропитания; взрывателя; боевой части. Планер зенитной управляемой ракеты 9М39 предназначен для создания управляющей аэродинамической силы, размещения бортовой аппаратуры управления, боевого снаряжения, а также двигательной установки ракеты. Планер ЗУР 9М39 (рис. 1) включает следующие элементы: аэродинамический насадок; рули; дестабилизаторы; корпус ракеты; крыльевой блок. 1 2 4 5 Рис. 1. Планер ЗУР 9М39: 1 – аэродинамический насадок; 2 – рули; 3 – дестабилизаторы; 4 – корпус ракеты; 5 – крыльевой блок 3 17 Корпус ракеты состоит из скрепленных между собой отсеков, является несущей конструкцией планера и принимает на себя всю силовую нагрузку в полете. Рули представляют собой две подвижные симметрично расположенные на корпусе ЗУР аэродинамические поверхности, обеспечивающие управление полетом ракеты. Дестабилизаторы состоят из двух неподвижных профильных металлических пластин, расположенных симметрично корпуса ракеты перпендикулярно рулям. Дестабилизаторы обеспечивают быстродействие и создание управляющего момента. Крыльевой блок предназначен для аэродинамической стабилизации ракеты в полете, создания подъемной силы при наличии углов атаки и поддержания требуемой скорости вращения ЗУР на траектории. Аэродинамический насадок предназначен для снижения сопротивления набегающего потока воздуха и представляет собой заостренный стержень с внешней винтовой канавкой, укрепленный на обтекателе в головной части ОГС. Конструкция планера выполнена по аэродинамической схеме «утка», в которой рули и дестабилизаторы расположены впереди центра тяжести, а крылья в хвостовой части ракеты. Подъемная сила рулей и крыльев добавляется к подъемной силе корпуса ракеты, создаваемой за счет угла атаки. Наряду с аэродинамическими силами на ракету в полете действует сила тяги двигателя, который перемещает ЗУР к цели и участвует в создании управляющих сил и моментов. Конструктивно зенитная ракета 9М39 состоит из скрепленных между собой отсеков (рис. 2). Рис. 2. Состав ЗУР: 1 – оптическая головка самонаведения; 2 – рулевой отсек; 3 – боевое снаряжение; 4 – маршевая двигательная установка с крыльевым блоком; 5 – стартовая двигательная установка ОГСН предназначена для захвата и автосопровождения целей, а также формирования сигналов управления ракетой. В ОГСН размещены: координатор со следящей системой; автопилот. Рулевой отсек обеспечивает газо-аэродинамическое управление ракетой и электропитанием бортовой аппаратуры, боевого снаряжения и других систем ЗУР в полете. 18 В корпусе рулевого отсека размещены: рулевая машинка с рулями (РМ); бортовой источник питания (БИП); датчик угловых скоростей (ДУС); усилитель (УДУС); пороховой аккумулятор давления (ПАД); пороховой управляющий двигатель (ПУД); розетка с блоком взведения (РБВз); дестабилизатор. Боевое снаряжение ракеты (БСН) предназначено для поражения воздушных целей. БСН включает: боевую часть (БЧ); взрыватель (ВЗ); взрывной генератор (ВГ). БСН конструктивно выполнена в виде неразъемного соединения. Боевая часть является несущим отсеком ракеты, в котором размещены все составные части боевого снаряжения. Двухрежимная однокамерная маршевая двигательная установка предназначена для разгона ракеты до маршевой скорости и поддержания этой скорости в полете. В отсеке МДУ размещены: маршевый заряд; воспламенитель маршевого заряда; лучевой воспламенитель. Крыльевой блок предназначен для аэродинамической стабилизации ракеты в полете, создания подъемной силы при наличии углов атаки и поддержания требуемой скорости вращения ракеты на траектории. Стартовая двигательная установка (СДУ) предназначена для выброса ракеты из пусковой трубы и придания ей необходимой угловой скорости вращения. В отсеке СДУ размещены: стартовый заряд; воспламенитель стартового заряда. На внешней поверхности соплового блока маршевого двигателя закреплен крыльевой блок с четырьмя складывающимися крыльями. В процессе эксплуатации ракета находится в пусковой трубе и "покидает" ее только при пуске. Пусковая труба 9П39 является укупоркой при хранении и направляющей при пуске. Передний и задний торцы трубы закрыты легкосъемными резиновыми крышками. На трубе закреплены передняя и задняя стойки прицела, механизмы бортразъема, крепления НБП и ПМ, электрический разъем для подсоединения ПМ. 19 Пусковой механизм предназначен для подготовки к пуску и осуществления пуска ракеты. В корпусе ПМ установлены: электронный блок, телефон, стопорное устройство, вилка разъема, пусковой крючок и контактная группа. К нижней крышке ПМ крепится НРЗ 1Л14-1, выполненный в виде отдельного блока. На корпусе НРЗ имеется светодиод, сигнализирующий о неисправности НРЗ. Под крышкой НРЗ расположены переключатели кодов АМИ (амплитудномодулированных импульсов) и ГИ (гладких импульсов), устанавливаемые в положения, соответствующие действующему расписанию. ЗУР 9М39 обладает следующими основными ТТХ: Дальность поражения, м Максимальная высота поражения, м Минимальная высота поражения, м Масса снаряженной ракеты, кг Масса боевой части, кг Калибр, мм Средняя скорость полета на марше, м/с Располагаемые перегрузки ракеты, ед. п. Обеспечивается управляемый полет при падении скорости, м/с Угол зрения ОГС, град Угол пеленга ОГС, град Скорость вращения относительно продольной оси, об/с 5200 3500 10 10,7 1,27 72 560 10,2 до 340 2 ±38 12-20 В качестве метода наведения ЗУР применен метод пропорционального сближения. Система управления ЗУР – одноканальная. Общее устройство бортовой аппаратуры ЗУР 9М39 Функционально элементы ОГСН и рулевого отсека объединены в бортовую аппаратуру ЗУР. Бортовая аппаратура (БА) ЗУР 9М39 представляет собой совокупность технических устройств, работа которых обеспечивает решение задач одноканальной системы управления полетом ракеты и боевого снаряжения. Состав бортовой аппаратуры управления полетом ЗУР: оптическая головка самонаведения 9Э410; автопилот ракеты (АП). ОГСН решает задачи измерения координат и параметров относительного движения ракеты, а также формирования команд управления ее полетом. АП исполняет команды управления для требуемого маневра, а также стабилизации динамических свойств движущейся ракеты в широком диапазоне изменения условий ее полета. ОГСН включает в себя: координатор цели (КЦ); 20 устройство выработки команд (УВК). АП включает в себя: одноканальный рулевой привод (ОРП); автоматический контур стабилизации ракеты по угловой скорости колебаний корпуса относительно центра масс (демпфирование ракеты). Структурная схема бортовой аппаратуры представлена на рис. 2. ОГСН Автопилот Устройство выработки команд Координатор цели Автоматический контур стабилизации Одноканальный рулевой привод Рис. 2. Структурная схема бортовой аппаратуры ЗУР 9М39 Координатор цели (КЦ) предназначен для непрерывного автоматического определения угла рассогласования между оптической осью координатора и линией ракета-цель, слежения за целью и выработки сигнала, пропорционального угловой скорости вращения линии визирования цели. КЦ является функциональной системой и представляет собой замкнутый контур с изменяющейся структурой в зависимости от работы ОГС в режимах арретирования («АРР») и слежения («Слеж»). Режим арретирования обеспечивает прицеливание КЦ. При отсутствии сигнала от цели автомат разарретирования и пуска (АРП) ПМ формирует команду «АРР». По этой команде формируется контур стабилизации оптической оси пеленгатора (рис. 3). Обмотка корекции N Продольная ось ЗУР ОГБ Усилитель коррекции ηз Ось ания елив S п ри ц Обмотка корекции Обмотка пеленга ПТ ПМ Обмотка заклона Тракт арретира Рис. 3. Структурная схема контура стабилизации (арретирования) оптической оси пеленгатора 21 Контур арретирования представляет собой следящую систему стабилизации, обеспечивающую постоянный угол между оптической осью оптикогироскопического блока (ОГБ) и продольной осью ракеты (10°), называемым углом заклона. Угол заклона обеспечивает угол возвышения в вертикальной плоскости и необходим для компенсации баллистического «провисания» ракеты при старте, возникающего за счет действия силы тяжести. Элементом, регистрирующим угловое рассогласование между оптической осью пеленгатора и продольной осью ракеты (угол пеленга η), является обмотка пеленга. При отклонении оси пеленгатора от продольной оси ракеты обмотка пеленга формирует переменное напряжение, амплитуда которого пропорциональна величине отклонения, а фаза – направлению отклонения оси пеленгатора от продольной оси ракеты. Это напряжение через тракт арретира подается на усилитель коррекции и далее − на обмотку коррекции. Переменное магнитное поле обмотки коррекции взаимодействует с магнитным полем гироскопа, в результате чего гироскоп прецессирует в сторону уменьшения сигнала ошибки. При этом ошибка установки оси пеленгатора не превышает половину величины угла поля зрения пеленгатора (1°). Для обеспечения угла возвышения в вертикальной плоскости в контур арретирования включена обмотка заклона, расположенная в ПТ. Ось обмотки заклона ориентирована вертикально. При вращении ротора гироскопа в обмотке заклона формируется напряжение постоянной амплитуды Uηз, которое подается на тракт арретира, где сравнивается с напряжением обмотки пеленга. Разностное напряжение подается на обмотку коррекции, при этом оптическая ось пеленгатора отклоняется от продольной оси ракеты на постоянный отрицательный угол возвышения в вертикальной плоскости, равный 10°. При срыве автоматического сопровождения цели автомат разарретирования и пуска (АРП) пускового механизма формирует команду арретирования. Режим слежения. В режиме слежения производится измерение угловой скорости линии визирования «ракета-цель». При наличии сигнала от цели АРП ПМ формирует команду «Слеж», при этом контур сопровождения цели приобретает следующую структуру (рис. 4). Обмотка корекции N Продольная ось ЗУР Ось п Цель ния ли в а ри ц е Пр ОГ Усилительнопреобразовательный тракт ηп Δε ол од Б яо ьн а О сь Усилитель коррекции S ГБ Обмотка корекции Рис. 4. Структурная схема контура сопровождения цели 22 Контур сопровождения цели реализуется замкнутой следящей системой, задача которой заключается в устранении углового рассогласования Δε между линией визирования «ракета-цель» и оптической осью пеленгатора. Контур сопровождения формируется в процессе предстартовой подготовки автоматически по команде от АРП ПМ по результату анализа энергетики сигнала от цели и динамики ее сопровождения. Устройство выработки команд (УВК) предназначено для формирования сигналов управления ракетой на основе сигнала, поступающего из ОГСН. УВК производит преобразование сигнала управления, действующего на частоте вращения ротора гироскопа, в сигнал управления рулями на частоте вращения ракеты. Структурная схема УВК приведена на рис. 5. Катушки ГОН Генератор линеаризации fг+fр uсо из ОГСН fг Фазовый детектор 2fр fр fр Фильтр uк в автопилот 2fг+fр Рис. 5. Структурная схема устройство выработки команд С выхода электронного блока КЦ на вход фазового детектора поступает синусоидальный сигнал управления на частоте вращения ротора гироскопа, содержащий информацию о величине (амплитуда сигнала) и направлении (фаза сигнала) угловой скорости линии визирования цели. На другой вход фазового детектора подключено напряжение, снимаемое с генератора опорного напряжения (ГОН) на суммарной частоте вращения ротора гироскопа и ракеты fг+fр, так как ротор гироскопа и ракета вращаются в разные стороны. Сигнал на выходе фазового детектора содержит две составляющие: одна на суммарной частоте (fр + 2fг), а другая − на разностной частоте (fр) вращения ракеты и ротора гироскопа. Первая составляющая отфильтровывается с помощью фильтра фазового детектора, а вторая, содержащая информацию о величине и направлении вектора угловой скорости линии визирования цели на частоте вращения ракеты, поступает на автопилот. Автопилот (АП) является частью бортовой аппаратуры управления полетом ракеты и предназначен для отработки сигнала наведения с выхода УВК (с помощью одноканального релейного рулевого привода) и демпфирования колебаний ракеты относительно оси управления. 23 АП представляет собой одноканальную систему автоматического управления, задающим воздействием для которой является сигнал ошибки слежения с выхода следящего координатора цели, а объектом управления – рули ракеты, работающие в релейном режиме. Задачей автопилота является вывод ракеты в упреждённую точку встречи с целью по траектории, обеспечивающей отсутствие угловой скорости линии визирования (реализация метода пропорционального сближения). В данном случае наличие угловой скорости линии визирования является ошибкой наведения (параметром управления), которую автопилот должен свести к нулю. Одноканальный рулевой привод предназначен для создания управляющей силы по сигналам, поступающим из УВК. Рулевой привод включает аэродинамический и газодинамический приводы. Источником энергии для рулевого привода является газ высокого давления. Рулевой привод работает в релейном режиме. Аэродинамический привод предназначен для аэродинамического управления ракетой в полете. При этом работа осуществляется в режиме переброса поводка и жестко связанных с ним рулей в крайнее положение на угол ±15°. Газодинамический привод предназначен для управления ЗУР на начальном участке траектории, когда аэродинамические рули мало эффективны. По сигналам управления поворачивается газораспределительная втулка, обеспечивая выход газа от ПУД в одно или другое сопло, расположенное перпендикулярно продольной оси ракеты. Возникающая при этом сила тяги разворачивает ракету относительно центра масс. 3. УКУПОРКА И МАРКИРОВКА БОЕВЫХ СРЕДСТВ ПЗРК9К38 Укупоркой для ракет 9М39 служит ящик 9Я694, в ложементы которого укладываются две ракеты в трубах с пристыкованными наземными источниками питания и двумя запасными в индивидуальных чехлах. Рис. 6. Укупорочный ящик 9Я694 24 На наружной поверхности крышки ящика имеется металлический указатель, на котором представлена схема укладки ракет и запасных НИП. Для крепления крышки замками на ней установлено восемь крючков. На боковой стороне ящика имеется специальный металлический карман для укладки сопроводительных документов (формуляров). Для переноски ящика у него на боковых сторонах имеются специальные обрезиненные ручки. Ящик переносится с помощью двух человек. Укупоркой для ПМ 9П516-1 служит специальный ящик (рис. 7), в который одновременно укладывается одиночный комплект ЗИП (пакет с тремя парами светофильтров, защитные очки и салфетки). Масса ящика составляет с ПМ и ЗИП составляет 7,6 кг. Рис. 7. Укупорка ПМ Укупоркой для групповых комплектов ЗИП ракеты 9М39 и ПМ 9П516-1 служат специально оборудованные ящики. Масса ящиков с ЗИП составляет соответственно 2,53 и 4,53 кг. Для определения типа, вида боевого средства по внешним признакам осуществляется маркировка и окраска боевых средств комплекса и укупорки по установленным правилам. Рассмотрим примеры маркирования боевых средств и укупорки ПЗРК 9К38. 1. Маркировка пусковой трубы с ракетой содержит данные, относящиеся к изготовлению и снаряжению ракеты, а также к изготовителю пусковой трубы. Маркировка на ПТ наносятся черной краской на сторону, противоположную бортразъему (рис. 8). 25 6 5 4 3 О-Ф ОК СНАР 9П39 01-81-2 01345 9М39 01-81-2 01345 01-81-2 9 8 7 2 1 Рис. 8. Маркировка боевой ракеты: 1 – «ОФ» − обозначение действия боевой части (осколочно-фугасная); 2 – «ОК СНАР» − окончательное снаряжение; 3 – «9П39» или «9П39-1» − индекс трубы; 4 − номер партии изготовления трубы, год изготовления трубы, индекс предприятия-изготовителя трубы; 5 − учетный номер трубы; 6 – «9М39» − индекс ракеты; 7, 9 − номер партии изготовления ракеты, год изготовления ракеты, индекс предприятия-изготовителя ракеты; 8 − учетный номер ракеты Маркировка наземного блока питания содержит данные, относящиеся к его изготовлению и характеристикам. На торцевую часть батареи НБП черной краской наносятся (рис. 9): индекс наземного блока питания (9Б238); индекс предприятия-изготовителя, порядковый номер партии и номер изделия (2-03-827); рабочее давление газа в баллоне (P = 350кг/см2); условное обозначение месяца и года зарядки азотом НБП (06-82); масса изделия без колпака (1,285 кг). Маркировка ПМ содержит данные, относящиеся к его изготовлению. На металлическом шильдике, размещенном на левой стороне ПМ, наносятся (рис. 6): индекс пускового механизма (9П516-1); условное обозначение предприятия-изготовителя (000); год изготовления, номер партии и номер изделия (89, 2, 1245). 5 4 а) б) 6 9Б238 2-03-827 Р=350 кг/см2 3 9П516-1 1245289000 06-82 1,285 кг 7 2 1 Рис. 9. Маркировка наземного блока питания и пускового механизма: а – вид на торец НБП 9Б238; б – вид на шильдик ПМ 9П516-1; 1 – масса НБП без колпака; 2 − условное обозначение месяца и года изготовления; 3 – рабочее дав26 ление; 4 – индекс предприятия изготовителя, порядковый номер изделия, номер партии; 5 – индекс изделия; 6 – индекс пускового механизма (9П516-1); 7 – номер изделия (1245), номер партии (2), год изготовления (89) условное обозначение предприятия-изготовителя (000) Маркировка укупорки содержит данные о двух ПТ с ракетами, массе и разряде груза и выполняется краской желтого цвета. На лицевую стенку укупорки наносятся (рис. 10): индекс ракеты (9М39); индекс укупорки (9Я694); номер партии изготовления ракет (10); год изготовления ракет (85); шифр предприятия-изготовителя (2); заводские номера ракеты (10579, 10580); номер партии сборки ракет (10); год сборки ракет (85); шифр базы, производящей сборку ракет (2); количество ракет (2 шт.); надпись ОК. СНАР. (окончательно снаряженные); масса брутто (68 кг); предупредительные знаки ( , , ), обозначающие соответственно: положение верха укупорки, беречь от ударов, беречь от прямого воздействия солнечных лучей. На пенале для формуляра ракет наносятся: индекс ракеты (9М39); обозначение вида действия боевой части ОФ; заводские номера ракет (10579, 10580); номер партии сборки ракет (10); год сборки ракет (85); шифр базы, производящей сборку ракет (2). На крышке укупорочного ящика наносятся: разряд груза 17(степень опасности груза); знак авиатранспортабельности . АТ 27 2 4 3 1 5 10 85 10579 10579 85 10 ОФ 9М39 О-Ф 9М39 9Я694 8 2 10579 10580 2 ОК СНАР 2 ШТ. БРУТТО 68 КГ 6 7 8 9 6 85 2 7 9 А Т 17 10 10 11 Рис. 10. Маркировка укупорочного ящика 9Я694: 1 – положение верха укупорки; 2 – индекс укупорочного ящика; 3 – номер партии изготовления ракет; 4 – год изготовления ракет: 5 – номер (шифр) предприятия- изготовителя; 8 – заводские номера ракет; 6 – номер партии сборки ракет; 7 – год сборки ракет; 9 – номер (шифр) базы, производившей сборку ракет; 10 – знак опасности груза и разряд груза; 11 – знак авиатранспортабельности На учебно-тренировочные ракеты с ПТ и ПМ, габаритно-весовые макеты (ГВМ), укупорочные ящики из-под них наносятся соответствующие индексы. При этом надписи о НБП, номере партии, годе снаряжения и шифре предприятия, производившего снаряжение ракеты, на учебных средствах отсутствуют. На ПТ с учебно-тренировочными ракетами и укупорочных ящиках наносится надпись «УЧЕБН». На корпус учебно-разрезной ракеты, ПМ, торцы и боковую стенку укупорочного ящика наносится надпись «РАЗРЕЗНАЯ». На ПТ и ПМ габаритно-весового макета (ГВМ) наносится надпись «МАКЕТ». Тренировочно-практическая ракета в трубе 9Ф726 05.000 используется для психофизиологической подготовки стрелка-зенитчика по обращению с боевыми средствами комплекса. Учебно-тренировочная ракета в трубе 9Ф727 00.000 используется для обучения оператора правилам работы с комплексом. 2.2. ОПТИЧЕСКАЯ ГОЛОВКА САМОНАВЕДЕНИЯ 9Э410 Назначение, состав, технические характеристики ОГСН 9Э410 Оптическая головка самонаведения (ОГСН) предназначена для захвата и автоматического сопровождения цели по ее тепловому излучению, измерения угловой скорости линии визирования «ракета-цель» и формирования управляющего сигнала, пропорционального угловой скорости линии визирования «ракетацель». 28 Оптическая головка самонаведения формирует сигнал управления, обеспечивающий самонаведение ЗУР по методу пропорционального сближения. Технические характеристики ОГСН 9Э410 Тип головки Максимальный угол пеленга, град Частота вращения ротора, Гц Диапазон длин волн, мкм вспомогательного канала основного канала Охлаждение фотоприемника до температуры, °С 9Э410, пассивная, тепловая, следящая ±38 100 2,6-4,5 5-6,5 200 Оптическая головка самонаведения 9Э410 поддерживает непрерывный информационный контакт с целью вдоль линии визирования “ракета-цель” и обеспечивает: захват и автоматическое сопровождение цели по ее тепловому излучению в условиях воздействия ложной тепловой цели (ЛТЦ); выделение сигнала, пропорционального углу рассогласования между оптической осью ОГС и линией визирования «ракета-цель» (ошибки слежения), который необходим для нормальной работы следящей системы ОГС; выделение и формирование управляющего сигнала, пропорционального угловой скорости линии визирования «ракета-цель» (ошибки наведения). Структурно ОГСН 9Э410 включает в себя: координатор цели (КЦ); устройство выработки команд (УВК). Конструктивно ОГСН 9Э410 состоит из: оптической системы, собирающей поток лучистой энергии от цели и концентрирующей его в виде пятна малых размеров. В оптическую систему входит также спектроделительный фильтр, служащий для формирования рабочего диапазона длин волн ОГС из общего потока лучистой энергии; приемников лучистой энергии (фоторезисторов), преобразующих поток лучистой энергии в электрические сигналы; схемы переключения, обеспечивающей помехозащищенность ЗУР; следящего гироскопического координатора, осуществляющего непрерывное автоматическое слежение за целью; электронного блока СКЦ, предназначенного для формирования сигнала коррекции, пропорционального ошибке слежения р-ц; формирователя сигнала управления рулями (ФСУР), который формирует сигнал на разворот ракеты на начальном участке траектории, преобразует сигнал коррекции в сигнал управления на частоте управления ракеты, а также формирует команды управления для рулевого привода, пропорциональные ошибке наведения ракеты. 29 Спектроразделительный фильтр Главное зеркало магнит Контрзеркало Корригирующая линза ОК Схема переключения Uкор Электронный блок ВК Следящий гироскопический координатор ФСУР в УВК Фоторезистор ОК Обтекатель Фоторезистор ВК Рис. 1. Структурная схема ОГСН 9Э410 В состав ОГС входит также ряд автономных систем, а именно: система разгона ротора гироскопа; система стабилизации оборотов ротора гироскопа; система электрического арретирования ротора гироскопа. Устройство ОГСН 9Э410 Зеркально-линзовый объектив. Зеркально-линзовый объектив осуществляет прием лучистой энергии от цели и помехи, фокусировку ее в пятна небольших размеров в фокальных плоскостях основного и вспомогательного спектральных диапазонов объектива координатора. Зеркально-линзовый объектив состоит из следующих элементов (рис. 2): обтекателя; контрзеркала; главного зеркала-магнита; корригирующей линзы; спектроделительного фильтра. 30 Спектроразделительный фильтр Главное зеркало магнит Контрзеркало Корригирующая линза ЛТЦ Цель Фоторезистор ОК Обтекатель Фоторезистор ВК Рис. 2. Оптическая схема зеркально-линзового объектива Чтобы обтекатель пропускал лучистую энергию от цели с минимальными потерями, он изготавливается из прозрачного материала, обладающего высокой теплопроводностью, теплоемкостью и излучающей способностью. Для того чтобы при аэродинамическом обтекании воздуха нагрев был минимальным и равномерным, в центре крепится специальный аэродинамический насадок, который также снижает аэродинамическое сопротивление планера ракеты в полете. Главное зеркало-магнит представляет собой сферическую поверхность, выполненную на магните ротора гироскопа. В качестве отражательного слоя зеркала в инфракрасном диапазоне длин волн используется пленка из серебра. Главное зеркало фокусирует отраженную лучистую энергию на контрзеркало, между которыми расположена корригирующая линза. Корригирующая (исправляющая) линза исправляет искажения оптического потока лучистой энергии. После исправления оптический поток лучистой энергии попадает на контрзеркало (линзу “Монжена”), преломляется, фокусируется в виде пятна рассеяния малого диаметра (до 1 мм) и при помощи спектроделительного фильтра разделяется на основной и вспомогательный спектральные диапазоны. Спектроделительный фильтр является оптически прозрачным для потока лучистой энергии, излучаемой целями и зеркальным (отражающим) для излучения, поступающего от помех. В фокальных плоскостях основного и вспомогательного спектральных диапазонов объектива координатора находятся фотоприемники, представляющие собой диски с нанесенными на них в виде масок фоточувствительными слоями. Тип материала, из которого изготовлены фотоприемников лучистой энергии в ОГС определяется характером излучения воздушной цели, фона и искусственных помех. При этом для основного канала был выбран фотоприемник, наиболее 31 чувствительный к длине волны излучения цели (1,8-2,3 мкм). При охлаждении фоторезистора до t = 200С, его чувствительность смещается в сторону более длинных волн (до 3,5-5,1 мкм), что обеспечивает работу ОГСН по излучению газовой струи двигателя реактивной цели при стрельбе на встречных курсах, а также для ослабления излучения фона, помех, излучение которых находится в более короткой части ИК-диапазона волн. Фотоприемники. Фотоприемники основного и вспомогательного каналов предназначены для модуляции лучистой энергии, проходящей через зеркальнолинзовый объектив координатора цели и преобразования ее в электрические сигналы. В модулированном сигнале заложена информация о рассогласовании между оптической осью координатора и линии визирования «ракета-цель». В ОГСН 9Э410 применена широтно-импульсная модуляция лучистого потока. Фотоприемники основного и вспомогательного каналов выполнены в виде непрозрачных дисков-масок с радиально расположенными прямоугольными вырезами из фоточувствительного материала. Изображения удаленных источников излучения (цель, фон, помеха) расположены в фокальных плоскостях основного и вспомогательного каналов в виде пятен рассеяния. При совпадении направления на цель с оптической осью объектива, изображение удаленных источников излучения (цель, фон, помеха) фокусируется в центр соответствующего фотоприемника. При появлении углового рассогласования между осью объектива и направлением на цель, пятно рассеивания смещается. При вращении ротора гироскопа фотоприемники вращаются. При прохождении пятна рассеивания над прямоугольным вырезом фоточувствительный слой засвечивается. Такая импульсная засветка преобразуется фотоприемниками обеих каналов в электрические импульсы, частота следования которых равна частоте вращения ротора. Длительность импульсов зависит от величины углового рассогласования. Чем больше рассогласование, тем дальше пятно рассеивания находится от центра анализатора изображения и тем меньше длительность импульсов. Это объясняется тем, что с удалением точек вращения от центра вращения увеличивается их линейная скорость при неизменной ширине прозрачного участка. Микрохолодильник предназначен для охлаждение фотоприемника до температуры 200С. При этом обеспечивается максимальная чувствительность ОГСН. В качестве рабочего хладагента системы охлаждения используется азот. Выбор этого газа определяется простотой получения заданной температуры охлаждения фотоэлемента, относительнонай доступностью газа и возможностью получения достаточно чистого газа из жидкой фазы без применения дополнительных ступеней его очистки. Для получения температуры охлаждения, близкой к температуре кипения азота при атмосферном давлении, применен микрохолодильник «брызгающего» типа. Охлаждающее устройство (рис. 3) состоит из двух узлов: микрохолодильника и корпуса фотоприемника с накопителем жидкого азота. 32 Азот Р = 350 кгс/см2 1 4 2 3 Рис. 3. Схема охлаждающего устройства: 1 – фотоприемник; 2 – камера; 3 – жидкий азот; 4 – фильтр Охлаждающее устройство работает следующим образом. После подачи из баллона сжатого азота микрохолодильник выходит на режим, причем насыщенная парожидкостная струя попадает непосредственно на капсулу фоточувствительного элемента и охлаждает ее. Жидкий азот заполняет внутреннюю камеру, а избыток его перетекает через боковые отверстия в полость наружной камеры. Набивка из стекловолокна внутри накопителя пропитывается жидким азотом. После отключения микрохолодильника охлаждение фоточувствительного элемента осуществляется азотом, удержанным волокнистой набивкой камеры. Наружная камера выполняет роль изоляционной низкотемпературной рубашки и воспринимает основной теплоприток, идущий по стенкам корпуса фотоприемника. Конструкция охлаждающего приемника обеспечивает выход на режим фоточувствительного элемента (до температуры 200С) за время не более 4,5 с и сохранение его чувствительности после прекращения подачи хладагента в течение 14 с. Гироскопический блок предназначен для совмещения оси ОГСН с направлением на цель. Гироскопический блок конструктивно включает в себя: зеркало-магнит с размещенными на нем элементами зеркально-линзового объектива, предусилителями и фотоприемниками основного и вспомогательного каналов; вращающееся контактное устройство; карданно-гироскопический подвес. Гироскопический блок выполнен в виде постоянного магнита, вращающегося со скоростью 100 об/с. С помощью карданно-гироскопического подвеса ротор гироскопа смонтирован таким образом, что он может поворачиваться около своего центра тяжести и одновременно вращаться вокруг своей продольной оси, т.е. иметь три степени свободы. Гироскопы, имеющие три степени свободы, называются трехстепенными или свободными. 33 Имея величину и направления ошибки слежения , следящая система должна сформировать сигнал, который обеспечил бы прецессию ротора гироскопа координатора цели в требуемом направлении. Для создания угловой скорости прецессии ротора гироскопа к нему необходимо приложить внешний момент, вектор которого должен находиться в плоскости угла рассогласования. В оптических следящих координаторах цели с гироскопическим приводом для создания внешнего момента, приложенного к ротору гироскопа, используют взаимодействие двух магнитных полей. С этой целью ротор гироскопа, который имеет постоянный магнит с ярко выраженными полюсами, помещают в магнитное поле катушки коррекции. Как было изучено ранее, первая гармоника сигналы ошибки имеет частоту, равную частоте сканирования (fскан), амплитуду, определяемую величиной отклонения цели от РСН, а фазу – направлением отклонения цели от РСН. Сигналы с выходов основного и вспомогательного каналов координатора поступают на схему переключения (СП) следящей системы, которая обеспечивает защиту от ЛТЦ путём стробирования (временной селекции) сигнала цели. Сигнал цели с выхода СП поступает на избирательный усилитель, настроенный на частоту первой гармоники спектра. На выходе избирательного усилителя образуется гармонический сигнал ошибки. Далее сигнал ошибки поступает на усилитель коррекции, где происходит повышение качества и мощности сигнала ошибки. С выхода усилителя коррекции сигнал ошибки поступает на катушку коррекции. Ось симметрии катушки коррекции совпадает с осью симметрии ЗУР, поэтому вектор напряженности (hк) магнитного поля, создаваемого катушкой коррекции, совпадает с осью симметрии ЗУР, а его направление и величина изменяются по закону сигнала ошибки. В результате взаимодействия магнитных полей катушки коррекции и постоянного магнита ротора (характеризующегося вектором магнитного момента mр) возникает внешний электромагнитный момент (Mвн), приложенный к ротору гироскопа (рис. 4). Рис. 4. Моменты, действующие на ротор гироскопа: ωпр — вектор угловой скорости прецессии; 34 mр — вектор магнитного момента постоянного магнита (связан с линией раздела полюсов магнита и согласован с положением фотосопротивления, вращается с частотой ωр, имеет постоянную величину); Н — вектор кинетического момента ротора (имеет постоянную величину и направление; совпадает с осью вращения ротора); hк — вектор напряженности магнитного поля катушек коррекции (совпадает с продольной осью ракеты; изменяет величину и направление по сигналу ошибки слежения); Мвн — вектор внешнего момента, создаваемый взаимодействием магнитных полей катушек коррекции и постоянного магнита; ωр, ωпр — угловая скорость и направление вращения ротора и прецессии ротора. Направление момента Mвн можно определить по правилу правой руки: если указательный палец направить по mр, а согнутый на 90° средний палец − по hк, то большой палец укажет направление вектора Mвн. Учитывая, что магнит и его mp вращаются и что hк изменяется по синусоидальному закону ошибки слежения, можно представить эпюру изменения величины и направления Mвн за один оборот ротора (рис. 5). uсо t hк t Мвн t ωпр t Тск Рис. 5. Образование внешнего момента Mвн Видно, что равнодействующая внешнего момента Mвн имеет вполне определенную величину и пропорциональна ошибке слежения. Из теории гироскопа известно, что при наличии внешнего момента, приложенного к ротору, гироскоп будет прецессировать, т. е. стремиться совместить по кратчайшему пути вектор кинетического момента (H) с внешним моментом Mвн, причем с угловой скоростью ωпр, пропорциональной величине Mвн. Благодаря свойству прецессии гироскопический следящий координатор постоянно совмещает свою оптическую ось с линией визирования цели, т. е. автоматически сопровождает цель. 35 Как указывалось ранее, поскольку следящая система имеет астатизм первого порядка, при сопровождении цели сигнал ошибки не равен нулю, а пропорционален угловой скорости прецессии, а значит угловой скорости линии визирования «ракета–цель». Поэтому сигнал ошибки является сигналом управления для автопилота, реализующего метод пропорционального сближения. Принцип выделения сигнала ошибки Сигнал ошибки формируется путем модуляции сигнала, при этом в параметры сигнала закладывается информация об отклонении цели от РСН. Для осуществления модуляции на фоточувствительный слой фоторезистора нанесена непрозрачная маска с прямоугольным окном. При попадании луча на непрозрачную маску луч на фоторезистор не проходит, поэтому напряжение на выходе фоторезистора в этом случае равно нулю. При попадании луча на прямоугольное окно луч поступает на фоторезистор и на выходе последнего появляется напряжение. Таким образом, при вращении фоторезистора осуществляется модуляция светового потока и на выходе фоторезистора образуется последовательность импульсов напряжения с частотой сканирования (рис. 6). а) Uсо(t) τи t Тск б) Uсо(t) τи t Тск в) Uсо(t) τи t Тск а – цель вверху; б – цель справа; в – цель справа, ближе к РСН (угловое рассогласование уменьшилось) Рис. 6. Формирование сигнала ошибки в ОГСН На рис. 4 показано влияние положения теплового пятна в растре модулятора на длительность импульса (при фиксированном угловом положении цели). Как 36 видно из рисунка, при приближении цели к РСН длительность импульса увеличивается и при совмещении цели с РСН импульсы вырождаются в постоянной напряжение. Период следования импульсов равен 0,01 с. За начало отсчета периода принимается ось ОY связанной системы координат (направленная вертикально вверх). Временное положение импульсной последовательности определяется угловым положением цели относительно продольной оси ОГСН – равносигнального направления (РСН): ε t Т ск , 360 где – угол между вертикальной осью и направлением на цель. На рис. 3, б цель сместилась на 90°, поэтому импульсная последовательность также сместилась по фазе на 90°. Чем дальше тепловое пятно от центра диска, тем больше линейная скорость пересечения им окна, соответственно, длительность импульса уменьшается. Таким образом, длительность импульса определяется удалением теплового пятна от центра диска: S τ Т , и 2 πRп ск где S – ширина окна; Rп – расстояние от центра диска до пятна; Тск – период сканирования. Таким образом, сигнал ошибки слежения содержит информацию о положении цели относительно РСН, заключенную в фазе импульсной последовательности – направление смещения цели относительно РСН и в длительности импульсов – величина смещения цели относительно РСН. Данный способ реализует принцип широтно-фазовой модуляции сигнала. Спектр импульсной последовательности представляет собой бесконечную сумму гармоник. S(f) 0 Fск 2Fск 1/τи 2/τи 3/τи f Рис. 7. Амплитудный спектр периодической последовательности прямоугольных видеоимпульсов Расстояние между соседними гармониками спектра равно частоте повторения импульсов (частоте сканирования) Fск 1/ Т ск 100 Гц . Расстояние между «нуля37 ми» составляет 1/ τи . Таким образом, чем шире импульс, тем меньше ширина лепестка спектра. Для того чтобы из всей совокупности гармоник выделить напряжение сигнала ошибки (первую гармонику спектра), импульсная последовательность с выхода фоторезисторов поступает на избирательный усилитель, представляющий собой фильтр НЧ, настроенный на частоту сканирования 100 Гц. Избирательный усилитель подавляет высшие гармоники и выделяет гармоническое напряжение сигнала ошибки частотой 100 Гц. Амплитуда напряжения сигнала ошибки пропорциональна длительности импульсов, т.е. – величине смещения цели относительно РСН, а фаза определяется направлению смещения цели относительно РСН. В дальнейшем напряжение сигнала ошибки используется для обеспечения слежения ОГСН за целью, а также для выработки команд управления рулями. При автоматическом слежении за движущейся в пространстве воздушной целью, оптическая ось координатора всегда будет отставать от линии визирования “ракета-цель”. Задача следящей системы ОГС заключается в формировании такого управляющего сигнала от цели, который был бы направлен на уменьшение ошибки слежения. Необходимая для этого информация об ошибке слежения заложена в электрическом синусоидальном сигнале на выходе электронного блока координатора. 2.3. КООРДИНАТОР ЦЕЛИ Назначение и состав координатора цели Координатор цели (КЦ) предназначен для непрерывного автоматического определения угла рассогласования между оптической осью координатора и линией ракета-цель, слежения за целью и выработки сигнала, пропорционального угловой скорости вращения линии визирования цели. Координатор цели состоит из собственно координатора и электронного блока. Координатор включает в себя два основных узла: статор и ротор (гироскоп). Статор обеспечивает вращение ротора гироскопа, его электрическое арретирование и электромагнитную коррекцию. На статоре размещены катушки: коррекции; вращения; разгона; пеленга (арретира); ГОН. 38 3 4 2 5 1 6 Рис. 1. Устройство ОГСН: 1 – статор; 2 – катушка коррекции; 3 – блок катушек вращения; 4 – блок катушек разгона; 5 – катушка пеленга (арретира); 6 – катушка ГОН Ротор представляет собой вращающийся с частотой г постоянный магнит с явно выраженными полюсами, имеющий сферическую отражающую поверхность. Ротор установлен на кардановом подвесе, обеспечивающим возможность «прокачиваться» на углы пеленга. На роторе закреплены детали оптической системы, два фотоприемника (основного и вспомогательного каналов) и два предусилителя сигналов (рис. 2). 2 3 4 5 6 7 8 1 10 9 Рис. 2. Устройство координатора: 1 – аэродинамический насадок; 2 – обтекатель; 3 – контрзеркало; 4 – светоделительный (интерференционный) фильтр; 5 – корригирующая линза; 6 – ФП ОК; 7 – зеркало-магнит; 8 – предусилитель ОК; 9 – предусилитель ВК; 10 – ФП ВК 39 Электронный блок КЦ предназначен для преобразования модулированного лучистого потока в электрический сигнал управления синусоидальной формы на частоте вращения гироскопа, амплитуда которого пропорциональна углу рассогласования, а фаза определяет направление рассогласования. В состав электронного блока КЦ входят (рис. 3): фотоприемники ОК и ВК; предусилители основного (ПУ ОК) и вспомогательного (ПУ ВК) каналов; усилитель с АРУ; схема переключения; усилительно-преобразовательные элементы; усилитель коррекции; схема ближней зоны. Принцип действия координатора цели Работу электронного блока следящего координатора цели ОГСН 9Э410 рассмотрим по функциональной схеме (рис. 3). Лучистый поток от цели или помехи поступает на фотоприемники, которые преобразуют энергию модулированного лучистого потока в модулированный электрический импульс, длительность которого обратно пропорциональна углу рассогласования, а фаза определяется направлением рассогласования. В качестве ФП ОК используется охлаждаемый до температуры –200°С фоторезистор, выполненный на базе сурмянистого индия (InSb), диапазон спектральной чувствительности которого соответствует длинам волн излучения 3,5-5 мкм. В качестве ФП ВК используется неохлаждаемый фоторезистор, выполненный на базе сернистого свинца (PbS), диапазон спектральной чувствительности которого соответствует длинам волн 1,8-2,8 мкм. Предусилители обеспечивают предварительное усиление сигналов с ФП до уровня, достаточного для работы последующих схем. Каждый ПУ представляет собой операционный усилитель на микросхеме, коэффициент усиления которого изменяется в широких пределах сигналом АРУ. 40 ФП ОК Предусилитель ОК Усилитель с АРУ Схема переключения ФП ВК Схема управления Избирательный усилитель Усилитель коррекции К катушке коррекции Фазовращатель с ПМ («Увод», «Разаррет.», «Вдогон», «Откл. селектора») Предусилитель ВК в УВК к ПМ Схема ближней зоны Усилитель с АРУ Фазовращатель Избирательный усилитель Рис. 3. Функциональная схема электронного блока КЦ ОГСН 9Э410 Усилитель с АРУ производит нормирование импульсного сигнала с предусилителя основного канала и вырабатывает сигнал АРУ для регулировки коэффициентов усиления предусилителей (одинакового для основного и вспомогательного каналов) в широких пределах, в зависимости от мощности лучистого потока, падающего на ФП. Схема АРУ работает только по сигналу с ПУ ОК. Схема переключения (рис. 5) предназначена для селекции целей от организованных и фоновых помех на основе логической и временной селекции и включает в себя логические элементы, срабатывающие при выполнении определенных условий. Критерии, по которым координатор отличает цель от ЛТЦ, использованы следующие: u вк 0,2 0,3 цель; u ок u вк 0,9 1,1 фон; u ок u вк 7 8 ЛТЦ. u ок При отстреле ЛТЦ появляется мощный источник излучения, уходящий от цели. На выходе основного канала координатора появится электрический сигнал большой величины, соответствующий реальной цели и сигнал малой величины, соответствующий ЛТЦ. Наличие сигнала ЛТЦ в основном канале объясняется пересечением спектральных характеристик фоторезисторов ОК и ВК. В то же время на выходе вспомогательного канала появится электрический сигнал малой величины, соответствующий реальной цели и сигнал большой величины, соответствующий ЛТЦ. 41 u(t) Цель ЛТЦ а) t б) t в) г) t Строб t Тск Рис. 4. Сигналы цели и ЛТЦ: а – сигналы в ОК; б – сигналы в ВК; в – сигнал компаратора; г – импульс строба Защита ОГСН от собственного излучения протяженных фоновых образований обеспечивается самим видом модуляции лучистого потока (чем больше длительность импульса, тем меньше ошибка рассогласования). с ПУ ОК с ПУ ВК Схема формирования строба Схема сравнения (компаратор) с ПМ на схему управления к ПМ Рис. 5. Схема переключения КЦ Схема управления представляет собой схему «И», на один вход которой поступает импульсный сигнал с усилителя с АРУ, а на второй – пропускающий строб со схемы переключения. При наличии обоих сигналов импульс цели проходит на избирательный усилитель. Избирательный усилитель предназначен для выделения из последовательности импульсов напряжения первой гармоники сигнала, амплитуда которого обратно пропорциональна длительности импульса. Фазовращатель компенсирует запаздывание (фазовый сдвиг) сигнала в электронном блоке. С фазовращателя сдвинутый по фазе сигнал поступает на усилитель коррекции, где синусоидальный сигнал усиливается до величины, достаточной для подачи на катушку коррекции. Наводимое в катушке коррекции вращающееся магнитное поле взаимодействует с вращающимся с той же частотой магнитным полем постоянного ротор-магнита гироскопа, вынуждает его прецессировать в сторону уменьшения рассогласования, чем обеспечивается отработка сигнала 42 ошибки следящей системы. Одновременно сигнал с катушки коррекции поступает в УВК для формирования управляющего сигнала. Амплитуда управляющего сигнала пропорциональна величине угловой скорости линии визирования «ракета-цель», а фаза – положению плоскости ее измерения. Таким образом, в процессе автоматического сопровождения цели координатором цели осуществляется измерение угловой скорости линии визирования «ракета-цель», необходимой для формирования команд управления пропорционального сближения. Схема ближней зоны служит для компенсации падения крутизны модуляционной характеристики сигнала коррекции в районе встречи ракеты с целью и определения момента начала работы схемы смещения в УВК. При малых расстояниях до цели (400-600 м) увеличение угловых размеров цели приводит к увеличению размеров пятна, что, в свою очередь, приводит к увеличению длительности импульсов с ФП. Как было изучено ранее, увеличение длительности импульсов происходит при уменьшении углового рассогласования между линией визирования и целью. Следовательно, увеличение длительности импульсов эквивалентно уменьшению сигнала ошибки. При этом происходит уменьшение крутизны зависимости амплитуды сигнала коррекции от ошибки рассогласования (рис. 6), что приводит к увеличению ошибок слежения. Uсо Uсо1 Uсо2 α1 α2 δε Рис. 6. Модуляционная характеристика ОГСН Принцип работы схемы ближней зоны заключается в следующем. Сигнал с ФП ОК поступает на вход усилителя с АРУ и на вход избирательного усилителя схемы ближней зоны. Избирательный усилитель схемы ближней зоны, как и избирательный усилитель основного канала, настроен на частоту первой гармоники сигнала ошибки. Однако, чувствительность избирательного усилителя схемы ближней зоны намного меньше чувствительности избирательного усилителя ОК. Поэтому напряжение первой гармоники на его выходе будет наблюдаться только 43 при наличии широких импульсов, когда дальность до цели мала (как известно из теории спектров, амплитуда первой гармоники увеличивается при увеличении длительности импульсов). Выходной сигнал избирательного усилителя с помощью схемы АРУ стабилизирует величину сигнала усилителя с АРУ. Сигнал с усилителя с АРУ поступает на фазовращатель, который компенсирует фазовую задержку сигнала в электронном блоке СКЦ. С выхода фазовращателя сигнал поступает на вход усилителя коррекции, где складывается с сигналом ошибки основного канала, тем самым увеличивая крутизну модуляционной характеристики сигнала коррекции и повышая точность наведения. Одновременно сигнал с выхода фазовращателя поступает в УВК на схему смещения, обеспечивающую наведение ЗУР в наиболее уязвимую часть воздушной цели. Вспомогательные системы координатора цели В состав вспомогательных систем координатора цели ОГСН 9Э410 входят: система разгона ротора гироскопа; система стабилизации оборотов ротора гироскопа; система электрического арретирования ротора гироскопа. Функциональная схема вспомогательных систем координатора цели ОГСН 9Э410 приведена на рис. 7. ОГСН 9Э410 Катушка пеленга Катушки ГОН Катушки вращения Система стабилизации оборотов Ротор-магнит гироскопа Катушки разгона Катушка коррекции Ключевые каскады Датчики положения Обмотка заклона ПТ с предусилителя ОК Усилитель коррекции Электронный тракт СКЦ Частотное реле Блок разгона и синхронизации Тракт арретира 44 Блок логики ПМ Рис. 7. Функциональная схема вспомогательных систем координатора цели ОГСН 9Э410 Система разгона ротора гироскопа предназначена для быстрого (в течение 5 с) разгона ротора гироскопа до частоты вращения fвр = 85-109 Гц. Разгон ротора гироскопа обеспечивается поочередной коммутацией тока через катушки разгона по информационным сигналам с датчиков положения (ДП). В состав системы разгона входят четыре датчика положения ДП1-ДП4, блок разгона и синхронизации, а также ключевые каскады, нагрузкой которых являются катушки разгона. Датчики положения размещены в ПТ, блок разгона и синхронизации размещен в ПМ, ключевые каскады и катушки разгона размещен в ОГСН. Работу системы разгона ротора гироскопа рассмотрим по рис. 8. В исходном состоянии ротор гироскопа неподвижен. Блок разгона и синхронизации «0» ДП 1 L1 Детекторы Д1-Д4 Усилителиограничители + 20 В ‒ 20 В Схема переключения Частотное реле L2 L2 ДП 2 ДП 4 N S L1 VT4 VT5 ДП 3 VT7 VT6 Ключевые каскады Рис. 8. Схема соединений элементов системы разгона ротора гироскопа В блоке датчиков пусковой трубы 9П39 расположены четыре датчика положения ДП1 – ДП4. Каждый датчик состоит из дросселя, обмотка 3 которого намотана на ферромагнитном сердечнике 2, и обмотки подмагничивания 4, размещенной на каркасе 1. Для обеспечения требуемой чувствительности ДП помещается в постоянное магнитное поле величиной Ф с (см. рис. 2.23), создаваемое обмоткой подмагничивания. Величина этого поля устанавливается подбором резистора R (см. рис. 4.9), общего для всех ДП. 45 Величина падения высокочастотного напряжения на дросселе ДП зависит от индуктивности дросселя, которая меняется в зависимости от положения полюсов ротора-магнита относительно ДП. 1 2 3 4 1 2 3 4 Рис. 4.9. Датчик положения полюсов ротора-магнита: 1 – каркас; 2 – ферромагнитный сердечник; 3 – обмотка дросселя; 4 – обмотка подмагничивания При вращении ротора-магнита на выходе ДП возникают амплитудномодулированные сигналы. Огибающие этих сигналов сдвинуты друг относительно друга на 900, так как ДП1 – ДП4 расположены на поверхности пусковой трубы симметрично (рис. 4.10). В зависимости от положения полюсов роторамагнита относительно ДП на дроссель ДП будет воздействовать изменяющееся магнитное поле. Его величина изменяется от Фс – 0,5Фм до Фс + 0,5Фм При приведении в действие наземного блока питания и выдаче питания на блок датчиков ПТ один из двух датчиков положения (ДП) сформирует электрический сигнал управления и выдаст его в блок разгона пускового механизма. Сигналы с ДП подаются на схему разгона блока разгона и синхронизации ПМ, которая управляет электронными ключами на транзисторах VT4-VT7. Эти транзисторы подключают поочередно к источнику тока то первые (L1), то вторые (L2) пары обмоток катушек разгона в зависимости от текущего положения полюсов (N-S) ротор-магнита относительно ДП. Катушки разгона L1 и L2 предназначены для создания знакопеременного магнитного поля при протекании по ним тока с блока разгона и синхронизации ПМ. При этом через каждую пару обмоток катушек (и L1, и L2) за один оборот ротора гироскопа ток протекает дважды – один раз в одном направлении, второй раз – в противоположном. В результате взаимодействия магнитных полей катушек и постоянного магнита возникает вращающий момент и начинается раскрутка ротора гироскопа. В последующем через каждые 180° поворота ротора срабатывает другой датчик положения и ток протекает через соответствующую катушку. За время не более 5 с ротор раскручивается до 100 об/с, после чего система разгона отключается частотным реле. Дальнейшее поддержание требуемой ско46 рости вращения обеспечивается системой стабилизации оборотов, исполнительным элементом которой являются катушки вращения ОГСН. Частотное реле предназначено для отключения схемы разгона при достижении ротором гироскопа требуемой частоты вращения fг = 85-109 Гц. Доведение скорости вращения до частоты fг = 92-104 Гц и поддержание ее в этих пределах осуществляется системой стабилизации оборотов ротора гироскопа (ССО). В состав схемы частотного реле входят (рис. 9): формирователь импульсов; дифференцирующая цепочка; пороговое устройство; исполнительный каскад, нагрузкой которого является реле Р1. С системы разгона Uпит с НБП На систему разгона Формирователь импульсов Дифференцирующая цепочка Пороговое устройство Исполнительный каскад Р1 к АРП Рис. 9. Функциональная схема частотного реле Импульсы с выхода ключевого каскада системы разгона на частоте вращения ротора гироскопа поступают на формирователь импульсов, который преобразует импульсы неправильной формы в прямоугольную форму. Данные импульсы поступают на дифференцирующую цепочку, где преобразуются в короткие импульсы. По мере разгона ротора гироскопа частота данных импульсов увеличивается. 47 u(t) а) t б) t в) t г) t д) t Рис. 10. Сигналы, действующие на частотном реле: а – импульсы с выхода ключевого каскада системы разгона; б – импульсы с выхода формирователя импульсов; ; в – импульсы с выхода дифференцирующей цепочки; г – напряжение с выхода порогового устройства; д – напряжение с выхода исполнительного каскада С выхода дифференцирующей цепочки последовательность импульсов подается на пороговое устройство, где производится накопление импульсов и преобразование их в нарастающее постоянное напряжение. При достижении ротором гироскопа требуемой частоты вращения напряжение на пороговом устройстве достигает величины срабатывания, данное устройство выдает сигнал на исполнительный каскад, который выдает напряжение на реле Р1. Реле Р1 срабатывает и своими контактами отключает питание со схемы разгона и одновременно выдает в АРП сигнал об окончании разгона ротора гироскопа. В дальнейшем поддержание требуемой скорости вращения ротора гироскопа обеспечивается системой стабилизации оборотов ОГСН. Система стабилизации оборотов (ССО) ротора гироскопа построена по принципу замкнутой следящей системы и предназначена для поддержания постоянной скорости вращения ротора гироскопа (по отношению к земной системе координат) после его разгона. Причем, до пуска требуемая частота вращения равна fг = 100 Гц, а после пуска требуемая частота вращения равна fг + fр = 120 Гц. 48 Меандр в УВК Усилительограничитель Дифф. цепочка Счетчик импульсов Дифференциальный УПТ Усилитель ССО Модулятор Катушки вращения Uзад ГОН Рис. 11. Структурная схема системы стабилизации оборотов Датчиком частоты вращения ротора гироскопа является обмотка ГОН, намотанная на статоре гироскопа. Ось обмотки ГОН перпендикулярна оси ЗУР, поэтому до пуска при вращении ротор-магнита в обмотке ГОН наводится ЭДС с частотой вращения ротора fг, а после пуска, поскольку ракета и ротор вращаются в разные стороны, в обмотке ГОН наводится ЭДС с суммарной частотой: fг + fр. u(t) u t а) t t б) t в) t г) t д) t е) t Рис. 12. Сигналы, действующие в системе стабилизации оборотов: а – напряжение на выходе ГОН; б – напряжение на выходе усилителяограничителя; в – напряжение на выходе дифференцирующей цепочки; г – напряжение на выходе дифференциального УПТ; д – напряжение на выходе модулятора (частота вращения ротора меньше требуемой); е – напряжение на выходе модулятора (частота вращения ротора больше требуемой) Данное напряжение ограничивается на усилителе-ограничителе (преобразуется в меандр) и подается на дифференцирующую цепочку, где преобразуется в короткие импульсы. Одновременно с выхода усилителя-ограничителя меандр подается в УВК в качестве опорного сигнала. Далее эти импульсы подаются на счетчик импульсов, где преобразуются в постоянное напряжение, пропорциональное частоте следования импульсов. Это напряжение подается на дифференциальный УПТ, на второй вход которого подается напряжение uзад, соответствующее требуемой частоте вращения ротора гироскопа. Дифференциальный УПТ 49 формирует постоянное напряжение, равное разности входных напряжений. Если частота вращения ротора гироскопа равна требуемой, то сигнал на выходе модулятора отсутствует и ротор вращается по инерции. Если частота вращения ротора отличается от требуемой, то на выходе УПТ образуется постоянное напряжение, пропорциональное разности частот действительной и требуемой. Данное напряжение подается на модулятор, коммутируемый напряжением ГОН. В соответствии с этим на выходе модулятора появляются прямоугольные импульсы с частотой ГОН и с амплитудой, пропорциональной напряжению на выходе УПТ. Если частота вращения ротора меньше требуемой, то фаза напряжения на выходе модулятора равна фазе напряжения ГОН. Данное напряжение усиливается и поступает на катушки вращения, что приводит к увеличению скорости вращения ротора. Если частота вращения ротора больше требуемой, то фаза напряжений на выходе модулятора становится противоположной фазе напряжения ГОН, что приводит к торможению ротора. Система электрического арретирования. Система электрического арретирования обеспечивает: совмещение оптической оси гироскопа с продольной осью ракеты при разгоне ротора гироскопа; заклон оптической оси гироскопа на 5° вниз от продольной оси ракеты (для «запоминания» уровня фона в районе цели) после окончания разгона и при не нажатом пусковом крючке ПМ; совмещение оптической оси гироскопа с линией прицеливания (на 10° ниже продольной оси ракеты) при нажатом пусковом крючке. В качестве измерительных элементов ошибки арретирования (угла пеленга п) используются катушка пеленга и обмотка заклона. Катушка пеленга расположена в координаторе цели ОГСН, а обмотка заклона в блоке датчиков трубы. Ось катушки пеленга совпадает с продольной осью ракеты и если плоскость вращения ротора гироскопа совпадет с плоскостью катушки пеленга (п = 0), то сигнал с катушки пеленга равен нулю. В случае отклонения оптической оси гироскопа на некоторый угол от продольной оси ракеты (п 0) с катушки пеленга снимается сигнал на частоте вращения ротора гироскопа, амплитуда и фаза которого однозначно характеризуют величину и направление ошибки арретирования. б а u(t) ut ut t t t 50 Рис. 13. Сигнал ошибки арретирования при отклонении оси гироскопа от продольной оси ракеты: а – в вертикальной плоскости; б – в горизонтальной плоскости Встречно с катушкой пеленга включена обмотка заклона, расположенная в блоке датчиков ПТ. Ось обмотки заклона находится в вертикальной плоскости и перпендикулярна продольной оси ракеты. Формируемый в обмотке заклона сигнал «ЗАКЛОН 10°» по величине пропорционален заданному углу пеленга (10°) в вертикальной плоскости между линией прицеливания и продольной осью ракеты. При отсутствии с частотного реле ПМ сигнала об окончании разгона ротора гироскопа на усилитель коррекции КЦ через тракт арретира ПМ поступает сигнал с катушки пеленга. Если ось ГСН не совмещена с продольной осью ПТ, то в катушке коррекции возникает момент коррекции, под действием которого ротор гироскопа прецессирует в направлении уменьшения ошибки арретирования. После окончания разгона ротора гироскопа и не нажатом пусковом крючке ПМ усилитель тракта арретира ПМ усиливает разностный сигнал с катушки пеленга и обмотки заклона 5°. Сигнал заклона 5° снимается со средней точки обмотки заклона. uзакл = 10° uзакл = 5° Рис. 14. Схема обмотки заклона Этот сигнал после усиления по мощности в усилителе коррекции поступает на катушку коррекции, вызывая прецессию ротора гироскопа в вертикальной плоскости до тех пор, пока разностный сигнал не станет равным нулю. В этом случае оптическая ось гироскопа арретируется на 5° выше линии прицеливания (на 5° ниже продольной оси ракеты) для обеспечения «запоминания» автоматом разарретирования и пуска ПМ уровня излучения фона в районе цели. Закло н5 ° Ц Линия прицеливания Ось П Т Заклон 10° ПТ Рис. 15. Схема углов заклона 51 После окончания разгона ротора гироскопа и перевода пускового крючка ПМ в среднее положение или в положение «до упора» усилитель тракта арретира ПМ усиливает разностный сигнал с катушки пеленга и обмотки заклона 10°. Этот сигнал после усиления по мощности в усилителе коррекции поступает на катушку коррекции, вызывая прецессию ротора гироскопа в вертикальной плоскости до тех пор, пока разностный сигнал не станет равным нулю. В этом случае оптическая ось гироскопа будет совмещена с линией прицеливания (заклонена вниз на 10° относительно оси ракеты). При переводе СКЦ в режим автосопровождения цели к усилителю коррекции вместо усилителя тракта арретира ПМ подключается электронный тракт СКЦ, сигнал с которого пропорционален ошибке слежения. 2.4. УСТРОЙСТВО ВЫРАБОТКИ КОМАНД Назначение, состав устройства выработки команд Устройство выработки команд (УВК) предназначено для формирования сигналов управления ракетой по сигналу ошибки, формируемому ОГСН. УВК обеспечивает: фильтрацию сигнала с СКЦ в целях повышения качества сигнала управления ракетой; формирование сигнала смещения траектории полета ракеты со среза сопла в центр планера цели в целях повышения эффективности поражения цели; формирование сигнала на поворот ракеты на начальном участке траектории в целях автоматического задания начальных углов возвышения и упреждения; преобразование сигнала управления, действующего на частоте вращения ротора гироскопа, в сигнал управления рулями на частоте вращения ракеты. В состав УВК входят (рис. 1): синхронный фильтр, динамический ограничитель, схема смещения, схема управления полетом ракеты на начальном участке, формирователь команд управления рулями. 52 uсо со схемы ближней зоны uη с катушки пеленга uсо с усилителя коррекции uη с катушки пеленга Схема смещения Синхронный фильтр Динамический ограничитель Σ Формирователь команд управления рулями на автопилот Схема управления полетом на начальном участке φзад время задержки (τ) Рис. 1. Структурная схема УВК Входными сигналами УВК являются: сигнал с усилителя коррекции, пропорциональный угловой скорости линии визирования ракета-цель; сигнал со схемы ближней зоны с информацией о требуемом смещении траектории полета ракеты со среза сопла в центр планера цели; сигнал с катушки пеленга; сигнал с катушки ГОН. Сигнал с усилителя коррекции проходит последовательно через синхронный фильтр (СФ) и динамический ограничитель (ДО) и поступает на сумматор, где суммируется с сигналами схемы смещения и схемы управления полетом на начальном участке. С выхода сумматор сигнал на частоте вращения ротора гироскопа поступает на формирователь команд управления рулями, где преобразуется в сигнал на частоте вращения ракеты. Далее сигнал поступает на автопилот. Принцип работы устройства выработки команд Сигнал ошибки с усилителя коррекции на частоте вращения ротора гироскопа, заключающий информацию об угловой скорости вращения линии визирования, поступает в УВК на синхронный фильтр (рис. 2). 53 54 uсо с усилителя коррекции uη с катушки пеленга uсо со схемы ближней зоны Компаратор φзад & (кл. 1) Фазовый детектор uоп Фазовый детектор uоп & (кл. 2) & (кл. 3) & (кл. 4) Модулятор uоп Модулятор uоп Элемент с петлей гистерезиса Схема задержки (τ) с ПМ Σ Амплитудный детектор Динамический ограничитель Модулятор uоп Схема смещения Синхронный фильтр Управляемый ограничитель Схема управления полетом на начальном участке ФНЧ ФНЧ ФНЧ Фазовый детектор uоп ФНЧ Амплитудный детектор ФНЧ Усилительограничитель Σ fг fоп = fг + fр Фазовый детектор uоп с ГОН Фильтр Формирователь команд управления рулями fр Σ на АП Генератор линеаризации Рис. 2. Функциональная схема УВК ЗУР 9М39 Синхронный фильтр предназначен для преобразования сигнала ошибки из гармонического вида в импульсный (используемый при релейном способе управления рулями). Кроме того, в случае отклонения частоты сигнала ошибки (fсо) от частоты вращения ротора гироскопа (fг) СФ формирует напряжение сигнала ошибки с частотой, равной частоте вращения ротора гироскопа. СФ состоит из двух идентичных каналов, выходные сигналы которых суммируются. Каждый из каналов представляет собой последовательно соединенные: фазовый детектор (ФД), фильтр низких частот (ФНЧ) и модулятор. Опорными сигналами ФД и модуляторов являются сигналы типа меандр на частоте вращения ротора гироскопа (fг), которые поступают с выхода системы стабилизации оборотов ротора гироскопа (ССО) и отличаются сдвигом фаз на 90°. u(t) а) u i t б) i t в) 0.3 cos( 0.002i ) 0.5 0.3 sin( 0.002i ) 0.5 t г) t д) i 0.3 co s ( 0.002 i ) 0.5 0.3 sin ( 0.002 i ) 0.5 t е) i ж) t t Рис. 3. Сигналы, действующие на синхронном фильтре: а – сигнал ошибки с усилителя коррекции; б – опорный сигнал с ССО; в, г – сигналы на выходах ФНЧ; д, е – сигналы на выходах модуляторов; ж – сигналы на выходе сумматора Сигнал ошибки с усилителя коррекции на частоте гироскопа поступает на два квадратурные ФД. Если частота сигнала ошибки (fсо) равна частоте вращения ротора гироскопа (fг), то на выходах ФД образуются постоянные напряжения, определяемые амплитудой и разностью фаз входного и опорных напряжений. Если же частота сигнала ошибки отличается от частоты вращения ротора гироскопа, то на выходах ФД образуются гармонические напряжения с частотой биений, равной разности частот fг fсо. Причем, фазы этих 55 напряжений отличаются на 90°. Данные напряжения поступают на ФНЧ, где отфильтровываются высокочастотные выбросы, и, далее – на модуляторы, где преобразуются в прямоугольные импульсы, промодулированные частотой биений fг fсо. Эти импульсы суммируются на сумматоре, в результате чего образуется импульсная последовательность постоянной амплитуды на частоте fг . Динамический ограничитель служит для дополнительного ограничения резко изменяющегося сигнала с СФ и состоит из усилителя-ограничителя и цепи формирования уровня ограничения, включающей амплитудный детектор (АД) и ФНЧ. Сигнал ошибки в виде меандра с выхода СФ поступает на усилительограничитель с управляемым уровнем ограничения сигнала. Уровень ограничения устанавливаются цепью, состоящей из АД и ФНЧ. При постоянной величине входного сигнала уровень ограничения постоянен и пропорционален величине напряжения с выхода ФНЧ. Поскольку ФНЧ является инерционным элементом, то при резком изменении входного сигнала величина уровня ограничения из-за запаздывания сигнала в цепи управления (на ФНЧ) изменяется с запаздыванием. При этом возрастающий сигнал на выходе усилителя ограничивается, а убывающий проходит без ограничения. Тем самым достигается плавность возрастания управляющего сигнала. а) u(t) б t в) t Рис. 4. Сигналы, действующие на динамическом ограничителе: а – сигнал на входе усилителя-ограничителя; б – управляющее напряжение на выходе ФНЧ; в – сигнал на выходе усилителя-ограничителя 56 С выхода ДО сигнал управления поступает на сумматор, на второй и третий входы которого поступают сигналы со схем смещения и управления полетом ракеты на начальном участке. Схема смещения предназначена для формирования сигнала смещения траектории полета ракеты со среза сопла в центр планера цели в ближней зоне цели (400-600 м до цели). Величина сигнала смещения определяется углом пеленга. Угол пеленга это угол, отсчитываемый от оси ЗУР до направления на цель. При стрельбе навстречу угол пеленга положителен, при стрельбе вдогон – отрицателен. Для смещения траектории полета ракеты со среза сопла в центр планера при стрельбе навстречу угол пеленга необходимо уменьшать, а при стрельбе вдогон угол пеленга необходимо увеличивать. а) б) ТВ Н Н ГС ГС сь О ьО Ос Р Ось ЗУ О О сь ЗУ Р ТВ η η Рис. 5. Формирование угла пеленга при стрельбе навстречу (а) и вдогон (б) Сигнал с катушки пеленга, амплитуда которого пропорциональна углу пеленга, а фаза соответствует направлению смещения оси ОГСН относительно оси ЗУР, подается на фазовый детектор. Опорным сигналом для фазового детектора является сигнал с катушки ГОН. На выходе ФД образуется постоянное медленно меняющееся напряжение, знак которого определяется зна́ком угла пеленга. Данное напряжение отфильтровывается на ФНЧ (подавляются высокочастотные выбросы) и подается на управляемый ограничитель, уровень ограничения которого устанавливается цепью «амплитудный детектор – ФНЧ». На данную цепь поступает сигнал ошибки, формируемый схемой ближней зоны при приближении к цели на 400-600 м, когда тепловое пятно цели принимает достаточно большой размер. Этот сигнал преобразуется на АД в постоянное напряжение положительной полярности, фильтруется на ФНЧ и поступает на управляющий вход ограничителя. При малом значении напряжения (или при его отсутствии) на управляющем входе ограничитель закрыт и схем смещения не работает. При поступлении со схемы ближней зоны сигнала достаточного уровня управляющий ограничитель открывается и сигнал со схемы смещения поступает на сумматор. Схема управления полетом ракеты на начальном участке предназначена для ускоренного вывода ЗУР на кинематическую траекторию после вылета из ПТ. Поскольку при старте продольная ось ЗУР направлена на цель, то при 57 больших скоростях цели ЗУР вынуждена совершать маневр, что приводит к повышенным ошибкам наведения. Н ТВ V б а Ли ни я и пр цел ив ани Ц я в х Рис. 6. Траектория ЗУР: а – кинематическая траектория; б – траектория без включения схемы управления полетом ракеты на начальном участке; в – траектория с включением схемы управления полетом ракеты на начальном участке Для устранения данного недостатка введена специальная схема, формирующая сигнал управления ракетой по пеленгу для придания ей необходимых углов упреждения и возвышения. Схема работает в режиме автосопровождения цели и отключается после пуска ракеты через заданное время . Работа схемы заключается в следующем. Сигнал с катушки пеленга, представляющий собой гармоническое напряжение с частотой г, амплитуда которого пропорциональна углу пеленга, поступает на электронный ключ 1 (схема И), на второй вход которого поступает управляющий сигнал с ключа 4 (схема И). При отсутствии сигнала с ключа 4 ключ 1 закрыт и сигнал с катушки пеленга на выходе ключа 1 отсутствует. Управляющий сигнал на ключе 4 формируется при наличии сигналов на его входах: со схемы задержки, определяемой время с момента пуска, и сигнала с цепочки «компаратор, ключ 3, элемент с петлей гистерезиса». Данная цепочка вырабатывает сигнал, если угол пеленга принимает большое значение (более заданного φзад), характерное для стартового участка. Цепочка работает следующим образом. Напряжение с катушки пеленга детектируется на АД и сглаживается на ФНЧ, т.е. преобразуется в медленно меняющееся постоянное напряжение. Данное напряжение поступает на компаратор, на второй вход которого подается постоянное напряжение, соответствующее заданному углу пеленга φзад. Компаратор – это устройство, формирующее напряжение, знак которого зависит от результата сравнения входного напряжения и опорного. 58 u(t) a б в t t Рис. 7. Вид сигналов, действующих на компараторе: а – сигнал на входе компаратора; б – опорный сигнал; в – сигнал на выходе компаратора Если угол пеленга менее φзад, то сигнал на выходе компаратора имеет отрицательную полярность, в противном случае сигнал на выходе компаратора имеет положительную полярность. Сигнал с выхода компаратора через схему И (ключ 3) поступает на элемент с петлей гистерезиса. Ключ 3 открыт только при наличии сигнала со схемы задержки (), поступающего с ПМ. Элемент с петлей гистерезиса – это устройство, запоминающее знак поданного на него сигнала. uвых ‒ uнас а б +uнас uвх Рис. 8. Петля гистерезиса Элемент с петлей гистерезиса построен на ферромагнитном сердечнике, помещенном в постоянное магнитное поле, которое создается током, проходящем через обмотку. Направление вектора поля определяется направлением тока. При увеличении входного напряжения выходное напряжение увеличивается по ветви а. При достижении напряжения определенной величины, называемой напряжением насыщения, выходное напряжение не увеличивается. При уменьшении входного напряжения выходное напряжение остается постоянным и начинает уменьшаться лишь при напряжении отрицательного знака. Таким образом, при подаче на вход элемента напряжения отрицатель- 59 ной или положительной полярности элемент «запоминает» знак полярности до очередного изменения полярности напряжения. Напряжение с выхода элемента с петлей гистерезиса поступает на ключ 4 и при наличии сигнала со схемы задержки открывает ее. Одновременно сигнал схемы задержки открывает схему И (ключ 2), через которую сигнал с катушки пеленга поступает на сумматор, увеличивая величину управляющей команды. Если угол пеленга не превышает φ зад, либо интервал времени после старта превысил , то сигнал с катушки пеленга на сумматор не поступает. Формирователь команд управления рулями предназначен для преобразования сигнала ошибки с частоты вращения гироскопа на частоту вращения ЗУР. Сигнал с выхода сумматора, представляющий собой сумму сигналов динамического ограничителя, схемы смещения и схемы управления полетом на начальном участке, действующий на частоте вращения ротора гироскопа fг, поступает на ФД формирователя команд управления рулями. На второй вход ФД поступает опорной напряжение с катушки ГОН. Поскольку ось катушки ГОН перпендикулярна оси ракеты, то при вращении ротора гироскопа и встречного вращения ракеты сигнал, наводимый в катушке ГОН, действует на суммарной частоте fоп = fг + fр. В результате перемножения сигналов фазовым детектором на его выходе образуются два сигнала: один – на частоте вращения ракеты fр, второй – на частоте 2fг + fр. Для выделения сигнала на частоте вращения ракеты служит фильтр, который подавляет высокочастотную составляющую сигнала с ФД. Сигнал на частоте вращения ракеты fр поступает на сумматор, где суммируется с сигналом с генератора линеаризации. Сигнал линеаризации представляет собой синусоидальный сигнал, имеющий постоянную амплитуду, и частоту, равную удвоенной частоте вращения ракеты. б Fу а uк Рис. 9. Зависимость управляющей силы от команды управления: а – при использовании метода линеаризации; б – без использования метода линеаризации При использовании метода линеаризации зависимость управляющей силы от команды управления принимает линейный вид. 60 2.5. АВТОПИЛОТ 1. НАЗНАЧЕНИЕ, СОСТАВ И ОБЩЕЕ УСТРОЙСТВО АВТОПИЛОТА В одноканальных ЗУР при резких перебросах рулей из одного крайнего положения в другое могут возникать возмущения, приводящие к колебаниям корпуса ракеты относительно центра масс с недопустимо большими угловыми скоростями. Для демпфирования этих колебаний вводится система стабилизации с датчиком угловой скорости (ДУС). Автопилот (АП) является частью бортовой аппаратуры управления полетом ракеты и предназначен для отработки сигнала наведения с выхода УВК (с помощью одноканального релейного рулевого привода) и демпфирования колебаний ракеты относительно продольной оси. АП представляет собой одноканальную систему автоматического управления, задающим воздействием для которой является сигнал управления с выхода УВК, а объектом управления – рули ракеты, работающие в релейном режиме. Задачей автопилота является вывод ракеты в упреждённую точку встречи с целью по траектории, обеспечивающей отсутствие угловой скорости линии визирования (реализация метода пропорционального сближения). В данном случае наличие угловой скорости линии визирования является ошибкой наведения (параметром управления), которую автопилот должен свести к нулю. В состав автопилота входят: усилитель-ограничитель; усилитель мощности; рулевая машинка; датчик угловых скоростей (ДУС); усилитель сигналов ДУС; дестабилизаторы. 61 Сигнал команды из УВК Усилительограничитель Усилитель мощности ДУС с усилителем Рулевая машинка ракета Рис. 1. Структурная схема автопилота Рис. 2. Размещение АП в рулевом отсеке: 1 – датчик угловых скоростей; 2 – дестабилизатор; 3 – рули Сигнал управления с фильтра УВК подается на усилитель-ограничитель автопилота (АП). Ограничение необходимо для преобразование сигнала из гармонической форму в прямоугольную. На второй вход усилителяограничителя поступает сигнал отрицательной обратной связи с усилителя датчика угловой скорости (ДУС), действующий на частоте вращения ракеты fр. Датчик угловой скорости (ДУС) предназначен для формирования электрического сигнала, пропорционального угловой скорости ракеты относительно ее поперечных осей. Этот сигнал представляет собой сигнал переменного тока на частоте вращения ракеты, амплитуда которого пропорциональна модулю вектора угловой скорости колебаний ракеты, а фаза характеризует плоскость колебаний. В результате суммирования данных сигналов образуется сигнал управления, гасящий колебания корпуса ракеты. С выхода усилителя-ограничителя сигнал поступает на усилитель мощности, нагрузкой которого являются обмотки рулевой машинки (РМ). 62 Рулевая машинка предназначена для аэродинамического управления ракетой в полете. Одновременно РМ служит распределительным устройством для газодинамического управления ракетой на начальном участке ее полета, когда аэродинамические рули еще не эффективны. Дестабилизаторы предназначены для обеспечения требуемых устойчивости и располагаемых перегрузок и создания дополнительного крутящего момента относительно продольной оси ракеты. При нахождении ракеты в трубе пластины дестабилизаторов находятся в сложенном состоянии; после вылета ракеты из трубы они фиксируются в откинутом состоянии и имеют постоянный угол наклона относительно продольной оси ракеты около 1,5°. Датчик угловой скорости Ракета в полете вращается не только вокруг своей оси, но и совершает колебания относительно своего центра тяжести. Датчик угловой скорости (ДУС) предназначен для формирования электрического сигнала, пропорционального угловой скорости ракеты относительно ее поперечных осей. Этот сигнал представляет собой напряжение переменного тока на частоте вращения ракеты, амплитуда которого пропорциональна модулю вектора угловой скорости колебаний ракеты, а фаза характеризует плоскость колебаний. После усиления этот сигнал используется для демпфирования угловых колебаний ракеты. Датчик угловой скорости представляет собой рамку, состоящую из двух обмоток. Эта рамка может свободно качаться в магнитном поле, создаваемом постоянным магнитом. Y ЦМ Z Х Вектор угловой скорости колебаний ДУС 1 3 Х 2 4 Рис. 3. Датчик угловой скорости Датчик угловой скорости устанавливается в ракете таким образом, чтобы его ось Х-Х совпадала с продольной осью ракеты. При вращении ракеты только вокруг продольной оси и отсутствии продольных колебаний рамка под действием центробежных сил устанавливается в плоскости, перпендикулярной оси вращения ракеты. Перемещение рамки в магнитном поле в этом случае не происходит, и ЭДС в ее обмотках не наводится. 63 При наличии колебаний ракеты относительно ее поперечных осей происходит перемещение рамки в магнитном поле. Наводимая в обмотках рамки ЭДС пропорциональна угловой скорости колебаний ракеты. Частота сигнала равна частоте вращения ракеты относительно продольной оси, амплитуда сигнала соответствует амплитуде колебаний ракеты, а фаза – направлению вектора угловой скорости колебаний ракеты. Синусоидальный сигнал, снимаемый с контактов 1-2 сигнальной обмотки ДУС, подается на усилитель. Для успокоения колебаний рамки служит демпфирующая обмотка, на контакты 3-4 которой подается часть усиленного сигнала. При этом в демпфирующей обмотке образуется ток. Данный ток вызывает появление силы, противодействующей колебаниям рамки. а) u(t) 0° 90° 180° 270° 360° t б) Рис. 4. Формирование сигнала в зависимости от положения рамки: а – вид сигнала ДУС; б – положение рамки y 1 z х 2 3 4 5 Рис. 5. Датчик угловой скорости ЗУР 9М39: 1 – рамка; 2 – полуось; 3 – магнит; 4 – башмак; 5 – кожух 64 При появлении продольных колебаний в результате воздействия ускорений на маятник ДУС происходит отклонение маятника на углы, пропорциональные угловой скорости колебания ракеты на частоте вращения ракеты вокруг продольной оси. Эти колебания маятника вызывают появление напряжения на обмотке ДУС. Данное напряжение усиливается и подается на усилитель-ограничитель для суммирования с сигналом команды из УВК. Дестабилизаторы предназначены для создания дополнительного крутящего момента относительно продольной оси ракеты. При нахождении ракеты в трубе пластины дестабилизаторов находятся в сложенном состоянии; после вылета ракеты из трубы они фиксируются в откинутом состоянии и имеют постоянный угол наклона относительно продольной оси ракеты 1,5°. Принцип работы автопилота Выходной сигнал фильтра УВК подается на усилитель-ограничитель автопилота (АП), который имеет большой коэффициент усиления. На второй вход усилителя-ограничителя поступает сигнал отрицательной обратной связи с усилителя датчика угловой скорости (ДУС), действующий на частоте вращения ракеты. На усилителе-ограничителе производится ограничение сигнала по амплитуде (преобразование в прямоугольные импульсы) и вычитание из управляющего сигнала. При этом суммарный управляющий сигнал меняет знак, что приводит к появлению управляющей силы, противоположной направлению колебательного движения, и в результате − к уменьшению амплитуды колебаний ракеты. На рис. 5 показан пример формирования суммарного управляющего сигнала. УВК формирует сигнал, обеспечивающий возникновение управляющей силы. На рис. 5, а показан результирующий сигнал с выхода УВК. Он является суммой сигнала линеаризации и сигнала на частоте вращения ракеты. При отсутствии сигнала ДУС сигнал с выхода ограничителя показан на рис. 5, в. Как видно, длительность импульсов не одинакова, следовательно, за оборот ракеты возникает управляющая сила, заставляющая ракету изменить свое положение. При наличии сигнала ДУС и суммировании его с управляющим сигналом (рис. 5, б) ограничитель формирует сигнал, показанный на рис. 5, г. Как видно, длительность импульсов изменилась, что обеспечивает изменение величины управляющей силы. В приведенном примере фазы управляющего сигнала на частоте вращения ракеты и сигнала ДУС равны. Если фазы данных сигналов будут различны, то, очевидно, управляющая сила изменит направление. 65 u(t) а) 3 2 1 u1( x) u2( x) u ( x) π π/2 3π/2 б) x sin ( x) π/2 π uîãð ( x) π/2 π π/2 3π/2 π ωрt в) x uîãð ( x) 2π 3π/2 x ω рt 2π 2π ωрt г) 3π/2 2π ωрt x Рис. 6. Формирование суммарного управляющего сигнала: а – сигнал с выхода УВК (1 – сигнал линеаризации; 2 – сигнал на частоте вращения ракеты; 3 – результирующий сигнал); б − сигнал с выхода ДУС; в − управляющий сигнал при нулевом сигнале ДУС; г – сигнал при наличии сигнала ДУС С усилителя-ограничителя сигнал поступает на усилитель мощности, нагрузкой которого являются обмотки рулевой машинки (РМ). Рулевая машинка Рулевая машинка служит для аэродинамического управления ракетой в полете. РМ одновременно служит распределительным устройством для газодинамического управления ракетой на начальном участке ее полета, когда аэродинамические рули еще не эффективны. РМ является газовым усилителем управляющих электрических сигналов, вырабатываемых УВК. Рулевая машинка обеспечивает поворот рулей на угол 15° от среднего положения при перемещении поршня в цилиндре влево или вправо до упора (релейный режим). Рулевая машина (РМ) состоит из обоймы, в приливах которой расположены рабочий цилиндр с поршнем и фильтр тонкой очистки пороховых газов. В обойму запрессован корпус с золотниковым распределителем. В корпусе также размещены две катушки электромагнитов. Обойма имеет две 66 проушины, в которых на подшипниках расположена стойка с пружинами (рессорой) и с напрессованным на нее поводком. В пазах поводка и стойки расположены рули, которые в полёте удерживаются в раскрытом положении стопорами и пружинами. В приливе обоймы, между проушинами, размещается газораспределительная втулка, жёстко закрепленная с помощью фиксатора на стойке. На втулке имеется паз с отсечными кромками для подвода газа, поступающего от ПУД к каналам и соплам. Рис. 7. Рулевая машинка в разрезе: 1 − рабочий цилиндр; 2 − катушки электромагнитов; 3 − золотниковый распределитель; 4 − корпус; 5 — обойма; 6 — фильтр; 7 — сопла; 8 — рули; 9 — поводок; 10 — поршень РМ работает от газов ПАД, которые по трубе через фильтр тонкой очистки поступают к золотнику и от него по каналам в кольцах, корпусе и обойме под поршень. Управляющие сигналы с ОГСН поступают поочерёдно в катушки электромагнитов РМ. При прохождении тока через правую катушку электромагнита якорь с золотником притягивается в сторону этого электромагнита и открывает проход газа в левую полость рабочего цилиндра под поршень. Под давлением газа поршень перемещается в крайнее правое положение до упора в крышку. Перемещаясь, поршень увлекает за собой выступ поводка и поворачивает поводок и стойку, а вместе с ними и рули в крайнее положение. Одновременно поворачивается и газораспределительная втулка, при этом отсечённая кромка открывает доступ газа от ПУД через канал к соответствующему соплу. При прохождении тока через левую катушку электромагнита поршень перемещается в другое крайнее положение. В момент переключения тока в катушках, когда усилие, создаваемое пороховыми газами, превышает силу притяжения электромагнита, золотник под дей67 ствием силы от пороховых газов перемещается, причём перемещение золотника начинается раньше, чем происходит нарастание тока в другой катушке, что повышает быстродействие РМ. 1 Подвод газа Выход газа 4 Выход газа 3 uбр 6 2 uбр 7 5 Газы от П УД 8 9 Рис. 8. Устройство рулевой машинки: 1, 2 – левый и правый электромагниты; 3 – якорь; 4 – золотник; 5 – поршень; 6 – цилиндр; 7 – выточка поршня; 8 – руль; 9 – сопло В состав машинки входят также рули. Руль представляет пластину, изготовленную из стали. Когда ракета находится в пусковой трубе, рули сложены в соответствующие щели, при этом один из рулей размыкает размыкатель розетки. После выхода ракеты из трубы, рули под действием пружин через стопоры и центробежных сил раскрываются. Стопоры под действием пружин выходят наружу и надежно фиксируют рули в раскрытом положении в полете; форма рулей выбрана таким образом, чтобы избежать отрывов потока и обеспечить на руле такие шарнирные моменты, с которыми бы справилась РМ. Аналогично раскрываются дестабилизаторы. Конструктивно они похожи на рули. Но корпусная часть, в которой размещены пружины и стопоры, крепится на обойме РМ. В нераскрытом состоянии дестабилизаторы уложены в углубление на корпусе РО. Стопоры утоплены. После выхода ракеты из трубы дестабилизаторы также под действием пружин и центробежных сил раскрываются. Стопоры под действием пружин выходят из корпуса и фиксируют дестабилизаторы в раскрытом положении в течение всего полета ракеты. 68 3 3 2 Подвод газа от ПУД 1 Рис. 9. Распределитель газа: 1 – стойка рулей; 2 – распределительная втулка; 3 – выходные сопла Командные сигналы с усилителя мощности АП поступают поочередно на катушки электромагнитов РМ. Одновременно со стойкой рулей поворачивается и газораспределительная втулка, при этом отсечная кромка открывает доступ газа от ПУД к соответствующему соплу для газодинамического управления ракетой на начальном участке полета. 2.6. РУЛЕВОЙ ОТСЕК Назначение, состав рулевого отсека Рулевой отсек (РО) предназначен для создания управляющей силы по сигналам, поступающим из УВК. В корпусе рулевого отсека размещены: рулевая машинка с рулями; бортовой источник питания (БИП), состоящий из турбогенератора и стабилизатора-выпрямителя; датчик угловых скоростей (ДУС) с усилителем; пороховой аккумулятор давления (ПАД); пороховой управляющий двигатель (ПУД); розетка бортразъема; дестабилизатор. Чертеж рулевого отсека показан на рис. 1. 69 1 3 2 4 5 9 7 6 8 Рис. 1. Чертеж рулевого отсека: 1 − датчик угловых скоростей с усилителем; 2 — рулевая машинка; 3 − пороховой управляющий двигатель; 4 − пороховой аккумулятор давления; 5 − стабилизатор-выпрямитель; 6 — турбогенератор; 7 —розетка бортразъема; 8 — рули; 9 — дестабилизаторы Конструкция рулевого отсека показана на рис. 2. Рис. 2. Вид рулевого отсека: 1 – датчик угловых скоростей; 2 – дестабилизатор; 3 – рули; 4 – розетка бортразъема; 5 − стабилизатор-выпрямитель; 6 – пороховой аккумулятор давления; 7 – турбогенератор Рулевая машинка (РМ) обеспечивает аэродинамическое управление ракеты в полете и работает от газа, поступающего из ПАД. При этом работа осуществляется в режиме переброса поводка и жестко связанных с ним рулей в крайнее положение на угол ±15°. Одновременно РМ является распределительным устройством в системе газодинамического управления ракетой на начальном участке траектории, когда аэродинамические рули мало эффективны. 70 Бортовой источник питания (БИП) обеспечивает электропитание аппаратуры ракеты в полете. Источником энергии для него являются газы, образующие при сгорании заряда ПАД. Бортовой источник питания состоит из двух отдельных блоков: турбогенератора и стабилизатора-выпрямителя. Турбогенератор вырабатывает электроэнергию, а стабилизатор-выпрямитель преобразует ее в требуемые для работы элементов ракеты напряжения. Пороховой аккумулятор давления (ПАД) обеспечивает питанием пороховыми газами РМ и БИП. Образование пороховых газов происходит за счет торцевого горения заряда. Пороховой управляющий двигатель (ПУД) является пиротехническим изделием и обеспечивает газодинамическое управление ЗУР на начальном участке полета. Датчик угловых скоростей (ДУС) формирует электрический сигнал, пропорциональный угловой скорости колебаний ракеты относительно ее поперечных осей. Этот сигнал используется в контуре управления ракеты для компенсации данных колебаний. Розетка обеспечивает связь ракеты с пусковой трубой. В ее состав входит также размыкатель блока взведения, отключающий цепи питания взрывателя и ПУД до выхода ракеты из трубы (до раскрытия рулей). Блок взведения выдает напряжение для срабатывания пускового электровоспламенителя взрывателя и электровоспламенителя ПУД. В блоке с розеткой выполнен контрольный разъем ракеты, используемый при регламентных проверках ракеты с помощью КПА. Дестабилизаторы предназначены для оптимального расположения центра давления (точка приложения равнодействующих аэродинамических сил) относительно центра тяжести ракеты, а также для поддержания вращения ракеты в полете. Плата обеспечивает присоединение концов жгута от боевой части БЧ и электровоспламенителей ПУД и ПАД к блоку взведения и БИП. Колодка обеспечивает электрическую связь между рулевым отсеком и ОГСН. Корпус отсека представляет собой тонкостенную цилиндрическую деталь, изготовленную из алюминиевого сплава Д16Т толщиной 1 мм. Для складывания рулей и дестабилизаторов в походном положении в корпусе имеются специальные щели. 2. УСТРОЙСТВО И РАБОТА БОРТОВОГО ИСТОЧНИКА ПИТАНИЯ Бортовой источник питания (БИП) предназначен для питания аппаратуры ракеты в полете и представляет собой электростанцию мощностью 250 Вт, источником энергии для которой являются газы, образующиеся при выгорании ПАД. БИП состоит из турбогенератора и стабилизатора-выпрямителя. Турбогенератор предназначен для выработки переменного напряжения. Он представляет 71 собой однофазный генератор с возбуждением от постоянного магнита с приводом от турбины на его валу. Турбогенератор (рис. 3) состоит из статора и ротора, на оси которого крепится турбина, являющаяся его приводом. Статор представляет собой литой корпус, в котором установлены два постоянных магнита и две секции с обмотками. 3 7 А-А 5 4 2 4 N S N S 6 6 1 А↓ А↓ 5 8 Рис. 3. Турбогенератор: 1 − статор; 2 — сопло; 3 — турбина; 4 — ротор; 5 – постоянные магниты; 6 – обмотки статора Турбогенератор является синхронным однофазным генератором с возбуждением от постоянных магнитов и приводом от газовой турбинки. Турбогенератор состоит из статора и ротора, на оси которого установлена турбинка. Статор состоит из корпуса, двух постоянных магнитов и двух обмоток. Ротор представляет собой ось с набором штампованных звездочек из листовой электротехнической стали. Ось установлена на двух радиальных шарикоподшипниках. Турбинка крепится на оси ротора. Принцип действия ТГ основан на прерывании и коммутации магнитного потока пересекающего витки обмотки статора. Коммутатором магнитного потока является ротор ТГ, приводимый во вращение рабочим колесом турбинки при воздействии газов ПАД. Для выхода газа в корпусе рулевого отсека имеется прямоугольный паз, через который газ сбрасывается в атмосферу. Пороховые газы ПАД через сопло попадают на лопатки турбины и приводят ее во вращение вместе с ротором. При повороте ротора на половину полюсного деления, направление магнитного потока, проходя через обмотку генератора, изменяется на обратное, создавая в обмотке статора переменную ЭДС, которая снимается с клемм и подается на вход стабилизатора-выпрямителя. Поворот ротора на одно полюсное деление соответствует одному периоду переменного то72 ка. Следовательно, частота переменного тока зависит от количества полюсов и скорости вращения ротора: f Zn / 60 , где Z − число полюсов (в данном генераторе их число равно 10); n − число оборотов в минуту (9000-18000). Таким образом, частота переменного тока составляет 1500-3000 Гц. Стабилизатор-выпрямитель предназначен для преобразования напряжения переменного тока в постоянные напряжения + 40 В и ± 20 В и стабилизации данных напряжений с точностью ± 2 В. Для этого стабилизатор-выпрямитель решает следующие задачи: регулирует скорость вращения турбогенератора при изменении давления газа; поддерживает напряжение заданного номинала при изменении напряжения на обмотках генератора. Необходимость стабилизации напряжений обусловлена изменением частоты переменного тока при неизбежных колебаниях давления газа в ПАД, а также при изменении нагрузки. Способ стабилизации частоты магнитоэлектрического синхронного генератора основан на гашении избыточной мощности привода за счет превращения его в потерю в магнитопроводе генератора. Стабилизация частоты происходит следующим образом (рис. 4). Газы высокого давления, поступающие от ПАД, раскручивают турбинку и связанный с ней ротор. При этом на обмотках статора возникает переменное напряжение, которое с помощью трансформатора Тр1 преобразуется в напряжение двух номиналов. Данные напряжения преобразуются в постоянные и поступают в нагрузку. Напряжения, формируемые генератором, как правило, не соответствуют требуемым, т.к. частота оборотов турбогенератора не постоянна. + 40 В Тр 1 Турбогенератор + 20 В от ПАД Ротор Статор 20 В Схема сравнения Дроссель управления Обмотка ТГ Компенсационная емкость С1 Усилитель ОС Дроссель насыщения Рис. 4. Структурная схема стабилизатора-выпрямителя 73 Поэтому напряжение с выпрямителя + 40 В поступает на схему сравнения, где сравнивается с опорным напряжением + 40 В. Если напряжение меньше опорного, то схема сравнения формирует постоянное напряжение, которое усиливается и поступает на дроссель управления. В управляющей обмотке дросселя протекает постоянный ток, подмагничивающий железо дросселя. Обмотка дросселя и емкость С1 образуют колебательный контур. К колебательному контуру подключена обмотка тахогенератора (ТГ). При подмагничивании железа дросселя реактивное сопротивление обмотки меньше реактивного сопротивления емкости С1, поэтому условий для резонанса нет. В цепи обмотки тахогенератора протекает незначительный ток, который не препятствует увеличению скорости вращения ротора. Если напряжение превышает допустимое значение и превышает значение опорного напряжения, то схема сравнения закрывается, ток через управляющую обмотку дросселя прекращается. Реактивное сопротивление обмотки дросселя возрастает и становится соизмеримым с сопротивлением емкости С1, возникает резонанс и ток в цепи обмотки тахогенератора резко возрастает, что вызывает увеличение электрических потерь в генераторе и торможение ротора. Стабилизация напряжения происходит следующим образом. Если напряжение меньше опорного, то схема сравнения формирует постоянное напряжение, которое усиливается и поступает на управляющую обмотку дросселя насыщения. Обмотка насыщения дросселя включена последовательно с первичной обмоткой трансформатора Тр1. При наличии тока в управляющей обмотке реактивное сопротивление обмотки насыщения мало, поэтому трансформатор Тр1 формирует максимальное напряжение. Если напряжение на выходе генератора превышает допустимое значение и превышает значение опорного напряжения, то схема сравнения закрывается, ток через управляющую обмотку дросселя прекращается. Поэтому реактивное сопротивление обмотки насыщения возрастает, что препятствует повышению напряжения на трансформаторе Тр1. Таким образом, при изменении скорости вращения турбинки изменяется ток в цепи регулирования, а следовательно степень торможения ротора и, как следствие этого, поддерживается частота вращения ротора генератора и напряжение в цепи 40 В. Поскольку напряжение 20 В формируется с тех же витков трансформатора Тр1, то стабилизируется и это напряжение. Стабилизированные напряжения 20 В поступают со стабилизатора-выпрямителя в ОГСН, ДУС и боевое снаряжение. 3. ПОРОХОВОЙ АККУМУЛЯТОР ДАВЛЕНИЯ И ПОРОХОВОЙ УПРАВЛЯЮЩИЙ ДВИГАТЕЛЬ Пороховой аккумулятор давления (ПАД) предназначен для питания пороховыми газами рулевой машинки и бортового источника питания. Соответственно 74 к нему предъявляются требования по постоянному газообразованию в течение времени работы бортовой аппаратуры ракеты. Поэтому выбран заряд с торцевым горением, что обеспечивает достаточно длительное горение. В зависимости от требований к скорости газообразования и времени работы устройства, форма заряда может быть выбрана такой, что она обеспечит максимальную или минимальную поверхность горения. Максимальная поверхность горения достигается созданием различных щелей, срезов и внутренних профилей. Если же требуется уменьшить поверхность горения, то ее закрывают различными бронировками, обеспечивая, например, только торцевое горение заряда. ПАД состоит из стального корпуса, являющегося камерой сгорания. Внутри корпуса размещается пороховой заряд, покрытый бронировкой − защитным слоем, препятствующим горению с боковых сторон. В корпус ввернут воспламенитель, состоящий из электровоспламенителя, навески пороха и пиротехнической петарды. При срабатывании электровоспламенителя срабатывает пиротехническая петарда и затем воспламеняется навеска пороха. Раскаленные частицы пороха поджигают основной заряд. Происходит торцевое горение заряда со скоростью примерно 5 мм/с в течение не менее 11 с. Расход газа составляет 2,5 г/с. Газ из дросселя поступает в БИП и РМ. 3 1 2 4 5 6 Рис. 5. Пороховой аккумулятор давления: 1 − корпус; 2 − заряд; 3 − дроссель; 4 − навеска пороха; 5 − петарда; 6 − электровоспламенитель Пороховой управляющий двигатель (ПУД) предназначен для газодинамического управления ракетой на начальном участке полета. Он работает короткое время до набора ракетой скорости при которой начинают эффективно работать аэродинамические рули. Соответственно величина газообразования здесь должна быть значительно больше. Компоновка ПУД напоминает компоновку ПАД (работа аналогична). Скорость горения заряда выше, чем в ПАД (и составляет 7 мм/с), так как время работы ПУД менее 0,7 с и он должен как можно быстрее выходить на максимальное давление. Образующийся газ через ввернутый в кор- 75 пус переходник поступает в газораспределительную систему, расходуя 20 г/с газа. 1 2 3 4 5 6 Рис. 6. Пороховой управляющий двигатель: 1 — переходник; 2 — корпус; 3 — заряд; 4 — навеска пороха; 5 — петарда; 6 — электровоспламенитель 2.7. БОЕВОЕ СНАРЯЖЕНИЕ ЗУР 9М39 Назначение, технические характеристики и состав боевого снаряжения Боевое снаряжение предназначено для поражения воздушной цели или нанесения ей повреждений, приводящих к невозможности выполнения ею боевой задачи. Основные характеристики боевого снаряжения: масса боевого отсека, кг 1,27 масса взрывчатого вещества, кг 0,4 масса осколков, кг 0,4 масса одного осколка, г 0,5 общее число осколков около 860 угол разлета осколков, град 25 средняя скорость разлета осколков, м/с 2000 время взведения ВЗ после вылета ракеты из трубы, 1-1,9 время самоликвидации ЗУР после ее вылета из трубы, с 14-17 толщина корпуса БЧ, мм 3 В состав боевого снаряжения ЗУР 9М39 входят (рис. 1): боевая часть (БЧ) типа 9Н312Ф; взрыватель (ВЗ) типа 9Э249; взрывной генератор (ВГ); остатки топлива двигательной установки. 76 БЧ 1 2 3 4 5 ВЗ ВГ Рис. 1. Устройство боевого снаряжения: БЧ — собственно боевая часть; ВЗ — взрыватель; ВГ — взрывной генератор; 1 —корпус; 2 — взрывчатое вещество; 3 — трубка; 4 — детонатор; 5—манжета Боевая часть 9Н312Ф осколочно-фугасного действия предназначена для создания заданного поля поражения, воздействующего на цель, после получения от взрывателя инициирующего импульса. Боевая часть состоит из корпуса 1, боевого (разрывного) заряда 2, детонатора 4 и трубки 3, в которую уложены провода от рулевого отсека к взрывателю. Корпус БЧ, выполненный из высокопрочной стали, представляет собой цилиндрическую деталь с толщиной стенки 3 мм. На торцах корпуса имеются посадочные места, и места крепления с соседними отсеками (РО и ДУ). Внутри корпус имеет насечку специальной формы, позволяющей при подрыве боевого заряда образовывать дробление на осколки. Образующиеся при дроблении осколки имеют массу 0,4-0,5 г, что обеспечивает эффективное поражение целей. Боевой заряд представляет собой взрывчатое вещество (ВВ), запрессованное в корпус БЧ. ВВ изготовлено из вещества ОКФАЛ-20 (взрывчатая механическая смесь на основе октогена). Оно имеет достаточно высокие характеристики детонации ‒ 8000 м/с. В то же время боевой заряд обеспечивает требования по отсутствию детонации при случайных воздействиях (прострел, возгорание, удар и т. п.). Для подрыва боевого заряда необходимо обеспечить определенное энергетическое воздействие на него с высокой скоростью по всей торцевой поверхности. Для этих целей служит детонатор. Он представляет собой заряд ВВ, более чувствительного к инициирующему воздействию со стороны взрывателя. В БЧ детонатор размещен непосредственно рядом с боевым зарядом. Так как взрыватель расположен за боевым зарядом, то для подвода электропитания с РО в боевом заряде имеется отверстие, сформированное установленной в этом месте трубкой. Через трубку протянуты четыре провода. Взрывной генератор предназначен для подрыва не сгоревшей части топлива маршевой двигательной установки (МДУ), в результате чего создается дополнительное поле поражения. ВГ представляет собой расположенную в корпусе БЧ 77 шашку с запрессованным в ней зарядом ВВ. Подрыв БЧ инициирует срабатывание ВГ, который передает импульс на остатки топлива МДУ и его подрыв. Принцип действия боевого снаряжения Рассмотрим работу боевого снаряжения ЗУР 9М39 по структурной схеме (рис. 2). Боевая часть Разрывной заряд Детонатор БЧ Взрыватель 9Э249 Детонатор ВЗ Ускорение МДУ (9g) Капсюль-детонатор ПДУ Блокирующий (инерционный) стопор 1-я ст. пр. ЭВ3 ЭВ2 ГМД2 ГМД1 Механизм самоликвидации Пиротехнический замедлитель Трубка взрывателя Иницирующий заряд Поворотная втулка Пиротехнический предохранитель Конденсаторы С1, С2 ЭВ1 Напряжение с БИП ВГ Остаток топлива ДУ Размыкатель розетки РО Напряжение с конденсатора блока взведения Рис. 2. Структурная схема боевого снаряжения ЗУР 9М39 После вылета ракеты из трубы напряжение с блока взведения через размыкатель РО поступает на электровоспламенитель ЭВ1 (напомним, размыкатель РО замыкает цепь при раскрывании рулей). От форса пламени ЭВ1 одновременно зажигаются пиротехнический предохранитель предохранительнодетонирующего устройства (ПДУ) и пиротехническая запрессовка механизма самоликвидации. 78 Взрыватель (ВЗ) предназначен для выдачи детонационного импульса на подрыв БЧ при встрече ракеты с целью или по истечении времени самоликвидации, а также для передачи детонационного импульса (через трубку ВЗ) от заряда БЧ к заряду взрывного генератора. Расположение взрывателя за боевым зарядом обусловлено тем, что он должен сработать после проникновения боевой части внутрь цели. При ударе корпусные элементы ракеты разрушаются вследствие больших нагрузок и в таком виде проникают внутрь цели. Взрыватель же, находясь за основным зарядом, успевает выдать импульс на его подрыв до своего разрушения, но при проникновении заряда внутрь цели. Взрыватель относится к электромеханическому типу. Он имеет две ступени предохранения, которые снимаются в полете, чем обеспечивается безопасность комплекса при эксплуатации. Основу взрывателя составляют два генераторных магнитоэлектрических датчика (ГМД). Основной (ГДМ1) срабатывает при попадании ракеты в цель в момент прохождения взрывателя через металлическую преграду или вдоль нее (при рикошете). Дублирующий (ГМД2) срабатывает при столкновении ракеты с целью. Предохранительно-детонирующее устройство предназначено для обеспечения безопасности в обращении с ракетой до момента взведения взрывателя ВЗ после пуска ракеты. Работа ПДУ (рис. 3) заключается в следующем. В поворотной втулке установлен капсюль-детонатор 6, который в исходном состоянии не находится на одной линии с детонатором 3, т.е. огневая цепь срабатывания детонатора взрывателя разорвана. Поворотная втулка закреплена на оси 5 и находится под постоянным воздействием крутящего момента возвратной пружины 11, которая стремится повернуть втулку по часовой стрелке. В исходном состоянии поворотная втулка удерживается от разворота во взведенное состояние стопором пиротехнического предохранителя 10 и блокирующим стопором 1. 79 4 3 5 7 Направление полета 6 8 9 2 10 11 1 12 Рис. 3. Предохранительно-детонирующее устройство: 1 – блокирующий стопор; 2 – поворотная втулка; 3 – детонатор; 4, 12 – подпятники; 5 – ось втулки; 6 – капсюль-детонатор; 7 – контактная группа; 8 – пиротехническая запрессовка; 9 – электровоспламенитель ЭВ1; 10 – стопор пиротехнического предохранителя; 11 – возвратная пружина При старте ракеты под действием осевого ускорения, создаваемого маршевым двигателем, блокирующий (инерционный) стопор ПДУ проседает вниз и не препятствует развороту втулки в боевое положение под действием возвратной пружины. Этим снимается первая ступень предохранения. При старте ракеты срабатывает электровоспламенитель ЭВ1 и поджигает пиротехнический предохранитель. Через 1-1,9 с после пуска ракеты пиротехнический предохранитель прогорает и поворотная втулка под действием возвратной пружины разворачивается в боевое положение. При этом замыкаются огневая (ось капсюля-детонатора совмещается с осью детонатора ВЗ) и электрическая (контакты «В») цепи (рис. 4). Контактная группа В представляет собой разомкнутые контакты, которые находясь на поворотной втулке, замыкаются при ее повороте. Боевые электровоспламенители ЭВ2, ЭВ3 служат для инициирования капсюля детонатора при наличии электрического импульса соответственно от ГМД1 и ГМД2. Взрыватель находится во взведенном положении и готов к действию. Этим снимается вторая ступень предохранения. В это же время продолжает гореть пиротехническая запрессовка механизма самоликвидации. Рассмотрим работу взрывателя по электрической схеме (рис. 4). При пуске ракеты по команде «Взведение» из БИП подается напряжение + 40 В на электровоспламенитель ЭВ1. При этом запускаются ПДУ и механизм самоликвидации. 80 После прогорания пиротехнического предохранителя поворотная втулка поворачивается и замыкается контактная группа В. При этом на элементы взрывателя поступает напряжение + 40 В. Конденсаторы С1, С2 заряжаются от БИП. Поскольку базы транзисторов VT1, VT2 имеют нулевой потенциал относительно эмиттеров, транзисторы закрыты, ток через ЭВ2, ЭВ3 не течет. В случае прямого попадания ракеты в цель или рикошета срабатывают основной ГМД1 и дублирующий ГМД2 датчики цели. В обмотках датчиков формируется электрический импульс. Этот импульс открывает транзисторы VT1, VT2, через которые ток поступает на ЭВ2, ЭВ3 и воспламеняет их. + 40 В из БИП − 40 В из БИП − 40 В БИП Корпус ПУСКОВАЯ ЦЕПЬ 1 БОЕВАЯ ЦЕПЬ Др 1 ГМД1 + 3 Др 2 2 4 R1 R2 B VD1 ЭВ1 С1 R3 + С2 ЭВ2 Контактная группа поворотной втулки ГМД2 VT1 ЭВ3 VT2 VD2 Рис. 4. Электрическая схема взрывателя 9Э249 От воспламенителя ЭВ2 последовательно срабатывают: капсюль-детонатор, детонатор ВЗ, детонатор БЧ и разрывной заряд БЧ. Детонационный импульс детонатора БЧ, кроме того, через взрывчатое вещество трубки ВЗ передается к ВГ, происходит срабатывание ВГ и подрыв остатков маршевого заряда двигательной установки при их наличии. От воспламенителя ЭВ3 последовательно срабатывают: пиротехнический замедлитель, инициирующий заряд, капсюль-детонатор, детонатор ВЗ, детонатор БЧ и разрывной заряд БЧ. Пиротехнический замедлитель служит для обеспечения задержки срабатывания капсюля детонатора на время, достаточное для заглубления БЧ в преграду. Механизм самоликвидации (СЛ), предназначен для подрыва боевой части через 14-17 с после старта ракеты, что соответствует промаху ракеты. По истечении времени самоликвидации (14-17 с) при промахе ракеты механизм самоликвидации формирует форс пламени для срабатывания капсюлядетонатора, что приводит к подрыву боевой части. Механизм СЛ (рис. 5) представляет собой кольцо с установленной в него пиротехнической запрессовкой, обеспечивающей требуемое время горения. Выходное отверстие механизма СЛ находится на оси капсюль-детонатор – детонатор ВЗ при взведенном положении взрывателя. 81 1 2 4 3 Рис. 5. Механизм самоликвидации: 1 – кольцо; 2 – пиротехническая запрессовка; 3 – капсюль-детонатор; 4 – детонатор ВЗ Основной датчик цели ГМД1 (импульсный вихревой магнитоэлектрический генератор) предназначен для формирования импульса электрического тока при попадании ракеты в цель в момент прохождения взрывателя через металлическую преграду со скоростью не менее 80 м/с (при ее пробитии) или вдоль нее (при рикошете). Конструктивно ГМД1 представляет собой постоянный кольцеобразный магнит 2, вокруг которого расположена обмотка 1 (рис. 6). а б 3 1 2 Рис. 6. Импульсный магнитоэлектрический генератор ГМД1: а – вид ГМД1 при пробитии преграды; б – продольный разрез ГМД1; 1 – обмотка ГМД1; 2 – кольцевой магнит; 3 – металлическая преграда Работа датчика основана на возникновении ЭДС в обмотке катушки датчика под действием вихревых токов, возникающих в металлических материалах при движении через них или вдоль них постоянного магнита, входящего в конструкцию датчика. Тем самым обеспечивается подрыв БЧ после ее проникновения в корпус цели, либо рикошета. 82 При перемещении обмотки 1 относительно магнитного поля, создаваемого вихревыми токами преграды, в обмотке возникает электрический импульс, под действием которой открывается транзистор VT1, что приводит к протеканию тока через ЭВ2. Дублирующий датчик цели ГМД2 (импульсный волновой магнитоэлектрический генератор) предназначен для формирования импульса электрического тока при столкновении ракеты с целью с относительной скоростью не менее 80 м/с (рис. 7). 3 2 а) б) Фм Фм 4 1 НП 6 7 Рис. 7. Волновой магнитоэлектрический генератор ГМД2: а – до встречи ракеты с целью; б – при встрече ракеты с целью; 1 – постоянный магнит; 2 – выводы обмотки; 3 – ярмо; 4 – обмотка катушки; 5 – якорь; 6 – сердечник; Фм – цепь магнитного потока В состав ГМД2 входят: магнит 1, установленный на ярмо 3, якорь 5 с ввинченным в него сердечником 6 и обмотки катушки 4. Обмотка имеет выводы для подключения к электрической цепи ВЗ. Принцип действия ГМД2 заключается в следующем. До встречи ракеты с целью магнитный поток Ф м постоянного магнита замыкается через ярмо, сердечник и якорь. При полете ракеты якорь удерживается около магнита силой магнитного притяжения, величина которой регулируется ввинченным в него сердечником 8, поэтому магнитная цепь не изменяется и в обмотке катушки ЭДС не наводится (рис. 7, а). При встрече с целью в результате удара возникают упругие деформаций, при этом якорь отрывается в направлении, противоположном направлению полета (НП). Происходит разрыв магнитной цепи и в обмотке индуктируется ЭДС (рис. 7, б). Под действием этой ЭДС в обмотке протекает импульс тока, который открывает транзистор VT2, что приводит к срабатыванию электровоспламенителя ЭВ3. Взрывной генератор предназначен для подрыва не сгоревшей части топлива маршевой двигательной установки (МДУ) и создания дополнительного поля 83 поражения. ВГ представляет собой расположенную в корпусе БЧ шашку с запрессованным в ней зарядом ВВ. 2.8. ДВИГАТЕЛЬНАЯ УСТАНОВКА ЗУР 9М39 Назначение, состав двигательной установки Двигательная установка ракеты 9М39 предназначена для решения следующих задач: выброса ракеты из пусковой трубы; придания ракете необходимой угловой скорости вращения; разгона до маршевой скорости; поддержания маршевой скорости в полёте. В состав двигательной установки входят (рис. 1): стартовый двигатель (СД); двухрежимный однокамерный маршевый двигатель (МД); лучевой воспламенитель замедленного действия. Рис. 1. Двигательная установка: 1 – маршевый двигатель; 2 – заряд II режима; 3 – заряд I режима; 4 – лучевой воспламенитель замедленного действия; 5 – стартовый двигатель Стартовый и маршевый двигатели являются реактивными двигателями на твердом топливе (РДТТ). В общем случае РДТТ представляют собой камеру сгорания, заканчивающуюся сопловой частью, в которой помещен заряд твердого топлива. Принцип работы реактивного двигателя на твердом топливе заключается в следующем. Твердое топливо, находящееся в камере сгорания, при горении превращается в газ. Процесс газообразования приводит к увеличению давления в камере и газ начинает истекать через сопло, воздействуя при этом на переднюю стенку двигателя и поверхность расширяющейся части сопла. В результате возникает так называемая сила тяги, толкающая двигатель в сторону противоположную истечению газа. Сила тяги зависит от характеристик твердого топлива (чем выше энергетические параметры, тем она соответственно выше) и конструкции сопла (чем ближе его параметры к идеальным, тем она выше). 84 Основной характеристикой РДТТ принято считать полный импульс тяги, показывающий, какую тягу может развивать двигатель в течение определенного времени (измеряется в кгс·с). Чем выше полный импульс тяги у двигателей с одной массой, тем на большее расстояние улетит ракета. Камера сгорания представляет собой узел, состоящий из цилиндрического корпуса (обечайки) и днища. В коротких двигателях они конструктивно могут быть выполнены в виде одной детали. Как правило, камеру изготавливают из металла, выбирая толщину стенок исходя из обеспечения прочности конструкции к воздействию внешних воздействий и внутреннего давления. Для того, чтобы противостоять температурным воздействиям, возникающим при горении твердого топлива, которые могут привести к прогару двигателя, на внутренние стенки камеры сгорания наносят теплозащитные покрытия, которые за счет низкой теплопроводности защищают стенки двигателя и позволяют снизить толщину их стенок. Сопловая часть выполняется отдельным блоком, присоединенным к камере сгорания. Конструктивно, в зависимости от требований к РДТТ в части увеличения тяги или снижения габаритов, сопловой блок может быть односопловым или многосопловым. Геометрия соплового блока строго определена и зависит от внутрибаллистических характеристик РДТТ и характеристик твердого топлива. Сопло Лаваля (рис. 2) имеет входную сужающуюся часть (конфузор), где газ протекает с дозвуковой скоростью (число Маха М < 1), критическую часть (зону критики), где скорость газа равна местной скорости звука в газовом потоке и расширяющейся выходной части (диффузора), где поток газа движется со сверхзвуковой скоростью. При этом реактивная сила имеет максимальную величиМ<1 М=1 М>1 ну. Рис. 2. Сопло Лаваля Сопло выполняют из прочных материалов, способных противостоять как тепловым нагрузкам, так и эрозии, возникающей от действия раскаленных мелких твердых частиц твердого топлива, движущихся вместе с газовым потоком. Для обеспечения различных режимов двигателя (интенсивный набор скорости и поддержание скорости) увеличивают или уменьшают поверхность горения заряда. Для увеличения поверхности горения в заряде выполняют щели или впрессовывают в заряд теплопроводные элементы, а для уменьшения поверхности горения часть поверхности заряда закрывают так называемой «бронировкой» из негорящих веществ. Для воспламенения заряда используются воспламенители, представляющие собой пиротехнические изделия, включающие навески из смесевого пороха, ко85 торый при горении образует большое количество раскаленных твердых частиц, и средство инициирования этой навески (либо электровоспламенитель, либо какой-нибудь пиротехнический элемент). Двигательная установка ЗУР 9М39 представляет собой РДТТ (ракетный двигатель на твёрдом топливе) тандемного расположения. Сила, приводящая ракету в движение (тяга), образуется в результате преобразования химической энергии твёрдого топлива при его сгорании в кинетическую энергию реактивной струи. Преобразование осуществляется в устройстве, называемом сопловым блоком. Сопловые блоки стартового и маршевого двигателей выполнены раздельно и имеют различную конструкцию. Структурная схема двигательной установки показана на рис. 3. Контактная плата ПТ СД Электровоспламенитель стартового двигателя Топливный заряд стартового двигателя Лучевой воспламенитель замедленного действия МД Электровоспламенитель маршевого двигателя Топливный заряд маршевого двигателя Рис. 3. Структурная схема двигательной установки Контактная плата ПТ предназначена для передачи электрического импульса с электронного блока ПМ на ЭВ стартового двигателя. ЭВ стартового двигателя предназначен для запуска стартового двигателя. Топливный заряд стартового двигателя предназначен для выброса ракеты из трубы с помощью стартового двигателя. Лучевой воспламенитель замедленного действия предназначен для обеспечения срабатывания маршевого двигателя на безопасном расстоянии от стрелказенитчика. ЭВ маршевого двигателя предназначен для запуска маршевого двигателя. 86 Стартовая двигательная установка (СДУ) Стартовая двигательная установка (СДУ) предназначена для выброса ракеты из трубы со скоростью 28 м/с и придания ей необходимой угловой скорости вращения 20 об/с. СДУ зенитной управляемой ракеты 9М37 представляет собой РДТТ с многосопловым блоком и зарядом, имеющим увеличенную поверхность горения. СДУ состоит из следующих элементов (рис. 4): камеры; стартового заряда; воспламенителя стартового заряда; газоподводящей трубки; соплового блока. Стартовый заряд представляет собой трубчатые пороховые шашки, свободно установленные в кольцевом объеме камеры. Воспламенитель стартового заряда состоит из корпуса, в котором размещены электровоспламенитель и навеска пороха. 8 1 2 5 6 4 3 7 Рис. 4. Эскиз стартового двигателя: 1 — газоподводящая трубка; 2 — сопло; 3 сопловой блок; 4 − стартовый заряд; 5 – воспламенитель стартового заряда; 6 — камера; 7 − контактная связь; 8 – разжимное кольцо СДУ имеет следующие технические характеристики: разгон ракеты до скорости, м/с время работы двигателя, с скорость вращения ракеты, об/с полный импульс тяги, кгcс максимальное давление внутри камеры, кгс/см2 температура продуктов сгорания, °К масса двигателя, кг 87 21-25 0,065 15-21 26 175 2700 0,5 масса заряда, кг 0,124 Работа двигателя должна закончиться в трубе, где он должен быть уловлен. Основу СДУ составляет камера, изготовленная из высокопрочной легированной стали. В корпус камеры ввернут на резьбе сопловой блок, имеющий шесть сопел: пять сопел расположены под углом к продольной оси ракеты и одно сопло расположено в центре. За счет косопоставленных сопел достигается вращение ракеты на начальном участке (при разгоне). Воспламенитель представляет собой узел, включающий электровоспламенитель и навеску пороха. В воспламенитель ввернута трубка, обеспечивающая передачу форса пламени от воспламенителя на пирозадержку маршевого двигателя. Электрическая связь СДУ с трубой осуществляется через контактную связь. При подаче на электровоспламенитель электрического импульса, последний срабатывает и поджигает навеску пороха воспламенителя. В результате горения навески загорается основной заряд, при этом давление внутри камеры быстро нарастает. Частицы газа, двигаясь с большой скоростью через сопла вызывают реактивную силу. В результате чего двигатель начинает разгонять и раскручивать ракету, придавая ей ускорение порядка 120 g. Процесс разгона кратковременный, после чего двигатель тормозится и улавливается в специальном расширенном пространстве пусковой трубы. После срабатывания СДУ форс пламени от его воспламенителя через газоподводящую трубку поджигает лучевой воспламенитель замедленного действия. Последний после сгорания его заряда воспламеняет воспламенитель МДУ. Маршевая двигательная установка (МДУ) с крыльевым блоком Маршевая двигательная установка (МДУ) предназначена: для разгона ракеты до маршевой скорости; для поддержания в полете постоянной скорости ракеты. Маршевая двигательная установка (рис. 5) представляет собой двухрежимный РДТТ на смесевом топливе с одним соплом. 88 1 2 3 4 6 5 Рис. 5. Маршевый двигатель: 1 – камера; 2 − проволочки; 3 — маршевый заряд; 4 — воспламенитель маршевого заряда; 5 — сопловой блок; 6 — лучевой воспламенитель замедленного действия Двигатель имеет два режима работы: первый режим − ракета разгоняется до маршевой скорости, что требует большой тяги; второй режим − ракета летит примерно с одинаковой скоростью, при этом тяга меньше чем на первом режиме. Для обеспечения безопасности стрелка-зенитчика, МДУ начинает работать примерно через 0,4 с после вылета из трубы. Тем самым обеспечивается зона безопасности не менее 5,5 м, обеспечивающая минимальное воздействие газовой струи работающего двигателя на человека. При старте ракеты на оператора действуют следующие продукты сгорания: пары соляной кислоты ‒ 295 мг/м3; пары окиси углерода ‒ 20 мг/м3; пары окиси азота ‒ 15 мг/м3. Двигатель имеет следующие характеристики: полный импульс тяги на первом режиме, кгс·с время работы первого режима, с полное время работы, с полный импульс тяги на втором режиме, кгс·с максимальное давление в камере, кг/см²; температура продуктов сгорания, °К масса двигателя, кг масса заряда, кг 1020 1,9 8,5 85 168 3260 5,7 4,5 Для обеспечения двухрежимной работы заряд двигателя в передней части имеет бронировку, закрывающую наружную поверхность и обеспечивающую торцевое горение заряда, а в задней части поверхность горения увеличена за счет 89 открытой наружной части на конусе и пазов на наружной поверхности цилиндрической части заряда. Заряд двигателя ‒ смесевой, т. е. в качестве горючего и окислителя в нем используются различные материалы. Окислителем в заряде является перхлорат аммония, выделяющий при нагреве кислород. В качестве горючего применяют гексоген и алюминиевую пудру. Гексоген, кроме прочего, является хорошим взрывчатым веществом, имеющим высокую скорость детонации, тем самым обеспечивается возможность подрыва остатков топлива при срабатывании БЧ. Для обеспечения требуемого режима горения в заряд запрессованы четыре серебряных проволочки. Имея высокую теплопроводность, они осуществляют местный нагрев заряда, обеспечивающий увеличение площади горения. Корпус двигателя изготовлен из листа высокопрочной легированной стали. Толщина стенок двигателя составляет 2,5 мм. Внутренняя поверхность двигателя покрыта теплозащитным покрытием толщиной 10 мм. В хвостовой части двигателя установлен сопловой блок с лучевым воспламенителем замедленного действия и воспламенитель МДУ. Лучевой воспламенитель замедленного действия предназначен для обеспечения срабатывания маршевого двигателя на безопасном расстоянии от стрелказенитчика. Лучевой воспламенитель замедленного действия обеспечивает передачу огневого импульса от стартового к маршевому двигателю. Лучевой воспламенитель представляет собой пиротехническое изделие, в котором запрессован заряд, состав которого и размеры подобраны таким образом, чтобы обеспечить его горение в течение 0,33-0,5 с во всем диапазоне рабочих температур. За это время ракета удаляется на расстояние до 5,5 м, что предохраняет стрелка-зенитчика от воздействия струи пороховых газов маршевого двигателя. Лучевой воспламенитель замедленного действия (рис. 6) представляет собой корпус 2, в котором размещены пиротехнический замедлитель 1 и передаточный заряд 4 во втулке 3. С другой стороны во втулку впрессован детонирующий заряд 5. От пороховых газов СД детонирующий заряд воспламеняется, и ударная волна, образованная при детонации, передается через стенку втулки и воспламеняет передаточный заряд, который зажигает пиротехнический замедлитель. От пиротехнического замедлителя поджигается воспламенитель маршевого заряда, который поджигает маршевый заряд. 90 Рис. 6. Лучевой воспламенитель замедленного действия: 1 − пиротехнический замедлитель; 2 − корпус; 3 − втулка; 4 − передаточный заряд; 5 − детонирующий заряд Сопловой блок выполнен в виде составного узла. На внешней части соплового блока имеются отверстия для крепления крыльевого блока. После срабатывания СДУ форс пламени от его воспламенителя через трубку поджигает лучевой воспламенитель замедленного действия. Последний после сгорания его заряда воспламеняет воспламенитель МДУ, от которого загорается основной заряд. Основной заряд начинает гореть по всей открытой поверхности, что создает максимальную тягу, обеспечивающую интенсивный набор скорости. Через 1,9 с заряд выгорает до области бронировки, при этом площадь горения уменьшается, соответственно уменьшается тяга двигателя (второй режим). При этом обеспечивает поддержание скорости ракеты на заданном уровне. В случае если при попадании ракеты в цель в МДУ останется топливо, оно подрывается вместе с БЧ от детонационного импульса взрывного генератора. Крыльевой блок предназначен для аэродинамической стабилизации ракеты в полете, создания подъемной силы при наличии углов атаки и поддержки требуемой скорости вращения ракеты в полете. Крыльевой блок (рис. 7) состоит из корпуса, четырех складывающихся крыльев и механизма стопорения. Корпус блока выполнен из алюминиевого профиля, получаемого методом протяжки. Он имеет четыре выступа для соединения с СДУ с помощью разжимного кольца. Складывающееся крыло состоит из штампованной алюминиевой пластины, которая крепится на оси, размещенной в отверстии корпуса. Механизм стопорения состоит из двух стопоров и пружины, с помощью которой стопоры разжимаются и запирают крыло при раскрытии. Поскольку ракета вращается, то после вылета из трубы под действием центробежных сил крылья раскрываются и стопорятся. Крыльевой блок крепится на сопловой блок МДУ винтами через отверстия в корпусе блока. 91 2 4 3 1 Рис. 7. Крыльевой блок: 1 − корпус; 2 − пластина; 3 − пружина; 4 − стопор 2.9. ПУСКОВАЯ ТРУБА И НАЗЕМНЫЙ БЛОК ПИТАНИЯ Назначение и ТХ пусковой трубы 9П39 Пусковая труба 9П39 предназначена для обеспечения прицельного и безопасного пуска ракеты и улавливания стартового двигателя. Пусковая труба является направляющим устройством при пуске и одновременно служит контейнером при переносе, хранении и транспортировании ракеты. Для переноски ракеты стрелком имеется ремень. Пусковая труба выполняет следующие функции: защита ракеты от влаги, в т. ч. при погружении в воду на глубине до 1 м в течение нескольких часов, пыли, воздействия соляного морского тумана и других агрессивных веществ, находящихся в атмосфере, и т.д.; обеспечение заданного направления движения ракеты при пуске и улавливание стартового двигателя; прицеливание стрелком-зенитчиком; вскрытие НИПа и подача азота в ОГСН; раскрутка гироскопа ОГСН и его заклон на 5° или 10° в вертикальной плоскости; электрическая связь пускового механизма с ракетой. Пусковая труба имеет следующие технические характеристики: длина, мм масса, кг запас прочности, пусков 92 1699 3,1 5 Конструкция трубы обеспечивает пять пусков ракет без потери эксплуатационных свойств. После пуска труба укладывается в укупорку, в формуляре на трубу делается соответствующая запись, труба возвращается на предприятиеизготовитель. На предприятии труба чистится, производится ее контроль, заменяется трубка подвода азота и другие поврежденные или утерянные съемные детали. После чего на поверхность трубы наносится красная полоска, являющаяся отметкой о пуске. 2. УСТРОЙСТВО ПУСКОВОЙ ТРУБЫ 9П39 Пусковая труба представляет собой цилиндрический контейнер с диаметром внутренней поверхности 72,2 мм, изготовленный из стеклоткани (рис. 1). Рис. 1. Пусковая труба: 1 – передняя крышка; 2 – раструб; 3 – гнездо НБП; 4 – блок датчиков; 5, 6 – передняя и задняя стойки прицела; 7 – ручка механизма накола; 8 – кнопка «Вдогон»; 9 – разъем; 10 – задняя крышка; 11 – колодка стартового двигателя Основу пусковой трубы составляет цилиндрический контейнер, который в походном положении закрыт передней и задней крышками. В передней части ПТ размещен блок датчиков, обеспечивающий разгон ротора гироскопа. В блоке датчиков также размещена антенна НРЗ. Для подсоединения НБП к трубе предусмотрено гнездо. Приведение в действие НБП осуществляется ручкой механизма накола. Электрическая связь ПТ и ПМ осуществляется с помощью разъема. В задней части ПТ установлена колодка стартового двигателя, через которую электрический импульс подается на стартовый двигатель. На ПТ установлена кнопка «ВДОГОН», с помощью которой производится переключение коэффициентов в схеме управления полетом ракеты на начальном участке. Рассмотрим устройство пусковой трубы. Цилиндрический контейнер изготовлен из стеклоткани и эпоксидной смолы. В его переднюю часть вмонтирован пластмассовый корпус блока датчиков с раструбом. Раструб (рис. 2) обеспечивает защиту аэродинамического насадка ракеты от механических повреждений и защиту ракеты от влаги и пыли благодаря резиновой манжете. Одновременно раструб защищает ОГСН от боковых засветок. Конструкция раструба препятствует затенению объектива при заклоне на 10° вниз благодаря впадине в нижней части. Чтобы при заклоне гироскопа ОГСН на 10° стенки раструба не затеняли (виньетировали) оптическую систему гироскопа, в нижней части раструба выполнена впадина. Раструб внутри имеет 93 кольцевую канавку, в которую западает пружинное кольцо, при этом производится улавливание стартового двигателя. Рис. 2. Раструб ПТ: 1 – кольцевая канавка; 2 – впадина Вся остальная поверхность представляет собой цилиндр, что является дополнительной защитой ОГСН от боковых засветок. Ракета входит в трубу ведущими поясками с определенным натягом. От продольных перемещений ракета удерживается стопором, изготовленным из прочной стали. Стопор (рис. 3) устанавливается в цилиндрическую направляющую в корпус трубы, своим зубом он входит в отверстие бугеля боевой части. От вертикальных перемещений стопор удерживается тягой и пружиной. Стопор имеет два положения. При транспортировании ракеты и перед пуском он глубоко входит в бугель ракеты, удерживая ее от любых продольных перемещений. При этом ракета остается на месте при падении ее на бетон с высоты 2 м передним или задним торцом. После приведения ракеты в боевое положение стопор опускается таким образом, что ракета начинает надежно удерживаться только от перемещения назад. При движении же вперед она давит на скошенную поверхность стопора, от чего последний уходит вниз и не препятствует движению ракеты. Таким образом, в боевом положении ракета удерживается только силами трения ракеты о стенки трубы, силами нормального давления стенок трубы на ракету, возникающих вследствие натяга и силой пружины. По этой причине не рекомендуется при боевой стрельбе наклонять ракету вперед более чем на минус 10° от горизонта. 1 2 3 7 5 4 6 Рис. 3. Механизм стопорения ракеты: 1 – корпус ракеты; 2 – бугель; 3 – стопор; 4, 5 – пружины; 6 – тяга 94 Для защиты внутренней полости трубы от влаги и пыли в передней части трубы имеется резиновая манжета. В походном положении, при транспортировании и хранении ракета закрывается передней и задней крышками. Передняя крышка (рис. 4) представляет собой пластмассовую деталь с металлическим кольцом, резиновой манжетой и замком. Металлическое кольцо, изготовленное из специальной стали, служит транспортным арретиром для ОГСН. При надетой крышке оно располагается напротив магнита гироскопа ОГСН, в результате чего гироскоп арретируется, т. е. устанавливается в положение, когда его ось совпадает с осью трубы. Рис. 4. Передняя крышка: 1 – металлическое кольцо; 2 – замок; 3 – резиновая манжета Задняя крышка (рис. 5) представляет собой резиновую манжету с замком. Для съема крышек необходимо откинуть лапки замков, после чего задняя крышка снимается за специальный выступ манжеты, а передняя за скобу. Рис. 5. Задняя крышка: 1 – резиновая манжета; 2 –замок Для переноски ракеты на трубе имеется специальный ремень, изготовленный из лавсана. Чтобы ремень не давил на плечо стрелка при переноске ракеты, на ремне имеется мягкая накладка. Ремень крепится к трубе двумя скобами. Скобы крепятся обоймами. Механический прицел состоит из передней стойки с мушкой, задней стойки с целиком, лампы световой индикации и диафрагмы. Стойки в походном положении сложены, а в боевом — откинуты и удерживаются пружинами. За счет наклона линии прицеливания на 10° вниз прицел обеспечивает заклон оси ракеты. С помощью прицела производится прицеливание и удержание цели 95 в поле зрения ОГСН. Кроме того, прицел обеспечивает оценку дальности до цели. С помощью лампы осуществляется индикация захвата цели ОГСН. Для прицеливания на трубе установлены две стойки передняя и задняя. Стойки прицела установлены таким образом, что его оптическая ось (линия прицеливания) заклонена вниз по отношению к оси трубы на 10° для придания ракете первоначального угла возвышения в момент пуска, что особенно важно при обстреле низколетящих целей, так как предотвращает касание ракетой местных предметов и поверхности земли. Треугольная метка на ПТ служит для ориентации глаза стрелка-зенитчика относительно прицела. На передней стойке находится мушка с отверстием (рис. 6), на задней стойке ˗ целик (рис. 7). Механизм мушки позволяет ориентировочно оценить дальность до цели: если угловой размер цели больше диаметра малой окружности, но меньше диаметра большой окружности, то ориентировочная дальность до цели составляет примерно 1,5 км. Цель будет находиться в зоне пуска, если ее размер не менее половины диаметра малой окружности. Рис. 6. Передняя стойка: 1 – мушка; 2 – защитная скоба Рис. 7. Задняя стойка: 1 – целик; 2 – лампа световой информации; 3 – диафрагма На задней стойке расположена лампа световой информации, которая загорается в том случае, когда ОГСН захватила цель. Во избежание ослепления стрелка-зенитчика при стрельбе в сумерках лампа закрывается диафрагмой. 96 Стойки в походном положении ракеты и при укладке в укупорку сложены, в боевом положении откинуты и удерживаются пружинами. Гнездо НБП служит для подключения НБП к ПТ (рис. 8). При установке НИП в гнездо необходимо, сориентировав штифт на штуцере НИП по направляющему пазу гнезда, вставить штуцер НИП в отверстие обоймы до выхода фиксатора из утопленного состояния. При снятии НИП фиксатор утопить до упора, нажав на него. Рис. 8. Гнездо НБП: 1 – рукоятка фиксатора; 2 – фиксатор; 3 – цилиндрическая обойма; 4 – пятиконтактная плата электроразъема Трубка подачи азота к ОГСН. В гнезде изготовлена цилиндрическая обойма, куда входит НБП. Из штуцера НБП через трубку азот поступает в ОГСН (рис. 9). При пуске трубка в начальный момент движения ракеты срезается о стальной нож. Нож с остатками трубки остается в трубе. В дальнейшем, при повторном снаряжении тубы, срезанная трубка удаляется. Рис. 9. Трубка подачи азота к ОГСН Блок датчиков трубы (рис. 10) обеспечивает раскрутку гироскопа и его заклон на 5° или 10°. В блоке датчиков расположены четыре датчика положения, катушка заклона и антенна НРЗ. Датчик положения представляет собой магнитопровод (кольцо из специального металла с высокой магнитной проницаемостью), на который намотаны две катушки. Катушка заклона представляет собой две обмотки, соединенные по97 следовательно. С крайних концов катушки снимается напряжение, соответствующее заклону 10°, а со средней точки снимается напряжение, соответствующее заклону 5°. Датчики положения обеспечивают управление раскруткой гироскопа, а катушки заклона заклон гироскопа в вертикальной плоскости. Блок датчиков залит пенополиуретаном. Рис. 10. Блок датчиков: 1 – антенна НРЗ; 2 – датчики положения; 3 – катушка заклона Стыковка с пусковым механизмом обеспечивается посадочными местами для механической стыковки и электроразъемами для электрической стыковки (рис. 11). Для механической стыковки в корпусе трубы имеется проушина, в которую вставляется ось пускового механизма, после чего механизм разворачивается и, после стыковки электрического разъема, штырь трубы входит в зацепление со стопором механизма. От внешних воздействий разъем закрывается пластмассовой крышкой, которая крепится к корпусу разъема пластинчатой пружиной. Рис. 11. Устройство стыковки пускового механизма с пусковой трубой: 1 – высокочастотный разъем антенны НРЗ; 2 – фиксатор; 3 – розетка электроразъема; 4 – проушина с пазом Механизм бортового разъёма. Электрическая связь трубы с ракетой обеспечивается с помощью бортразъема (рис. 12). Бортразъем трубы с помощью направляющих штырей входит в зацепление с разъемом ракеты и подпружинивается двумя плоскими пружинами. При движении ракеты в трубе штыри разъема выходят из зацепления, и разъем начинает двигаться по направляющим вниз. 98 Рис. 12. Механизм бортового разъёма: 1 – гнездо НБП; 2 – разъем ракеты; 3 – стопор; 4 – тяга Приведение в действие НБП производится рукояткой механизма «Накол» (рис. 13). Для этого необходимо, оттянув подпружиненную рукоятку, резким движением перевести ее из положения «Исходное» в положение «Накол». Рис. 13. Рукоятка механизма «Накол»: 1 – кнопка «Вдогон»; 2 – рукоятка механизма «Накол»; 3 – проушина; 4 – фиксатора наземного блока питания Для включения режима «Вдогон» на трубе имеется кнопка, обеспечивающая переключение коэффициента передачи координатора цели в режимах «Навстречу» и «Вдогон». При этом после пуска в режиме "Навстречу" на начальном участке ракета выводится на кинематическую траекторию более интенсивно. В задней части трубы установлена колодка стартового двигателя с запальной цепью (рис. 14), через которую подается электрический импульс из ПМ на стартовый двигатель. 99 Рис. 14. Колодка стартового двигателя: 1 – ограничительные резисторы электровоспламенителя СД На колодке распаяны (рис. 15) дроссели Др1, Др2, служащие для защиты запальных цепей от наводок электромагнитных полей (для этого же все проводники уложены в защитные экраны), и резисторы R1, R2, ограничивающие ток в цепи электровоспламенителя СД после срабатывания (для исключения короткого замыкания). R1 Др1 R2 Др2 ЭВ Рис. 15. Электрическая схема запальной цепи После вылета ракеты из трубы стартовый двигатель удерживается в пусковой трубе. При этом стрелок испытывает краткое воздействие в виде толчка вперед длительностью 20 мс, величиной около 300 кгс. Наземный блок питания 9Б238 Наземный блок питания 9Б238 предназначен для снабжения сжатым азотом ОГС ракеты и обеспечения комплекса электроэнергией в период подготовки ракеты к пуску. Основные технические характеристики НИП следующие: время выхода на режим, с 1,3 время работы, с, не менее 30 масса, кг 1,3 рабочее давление в баллоне при температуре +20°С, кгс/см 2 350 напряжение питания, В 20 В, + 5 НБП Он состоит из баллона, наполненного сжатым азотом, и электробатареи с твердым (при температуре окружающей среды) электролитом (рис. 16). 100 Рис. 16. Наземный блок питания 9Б238: 1 – батарея; 2 – капсюль-воспламенитель; 3 – боёк; 4 –баллон; 5 –стержень; 6 – контакты; 7 – мембрана; 8 – боёк Баллон предназначен для длительного хранения сжатого азота номинальным давлением 350 кгс/см2. Он представляет собой шарообразную емкость, изготовленную из двух стальных половин, сваренных между собой. Батарея состоит из электрохимических элементов, соединенных в смешанную последовательно-параллельную цепь. Между ними размещены пиротехнические нагреватели, а в задней части баллона установлен капсюльвоспламенитель. Пиронагреватель представляет собой плоскую шайбу из электроизоляционного асбеста, с одной стороны которого нанесен пиротехнический состав. Сверху на НБП надета резиновая рубашка, которая защищает уложенные провода и одновременно защищает от ожогов при отстыковке НБП после выстрела. Когда НБП не установлен в ракету, его штуцер защищен защитным пластмассовым колпаком. Приведение НБП в действие осуществляется надавливанием на боек. При его перемещении прокалывается мембрана и газ поступает по газоподводящей трубке пусковой трубы к холодильнику ОГСН. Одновременно газ поступает к бойку. Под действием давления газа боек перемещается с большой скоростью и накалывает капсюль-воспламенитель батареи. При этом возникает форс пламени, от которого воспламеняются все пиротехнические нагреватели. Выделяемое при их сгорании тепло (480-700°С) расплавляет электролит твердых электрохимических элементов, в результате чего батарея приводится в рабочее состояние. В процессе работы батарея разогревается, поэтому необходимо соблюдать осторожность во избежание ожога. Отработанный НБП можно отличить от целого по следующим признакам: по характерному следу на колпачке, закрывающем боек, что свидетельствует о нажимании на боек; по нарушению целостности манжеты, свидетельствующем о приведении в действие НБП. 101 2.10. ПУСКОВОЙ МЕХАНИЗМ Назначение, основные характеристики и состав пускового механизма ПМ 9П516-1 Пусковой механизм 9П516-1 предназначен для подготовки к пуску и осуществления пуска ракет 9М39. Пусковой механизм 9П516-1 имеет следующие основные технические характеристики: количество этапов анализа сигнала от цели 4 длительность каждого этапа анализа, с 0,2 режимы работы АРП электронного блока «Автомат» или «Ручной» индикация о захвате цели ОГСН звуковая и световая прерывистые звуковой и световой сигналы соответствуют: при f = 2,5 Гц сигнал от цели меньше сигнала от фона при f = 12,5 Гц сигналу «свой» от НРЗ время задержки старта, с 0,72 гарантийный ресурс ПМ, пуски 750 масса, кг 3 Пусковой механизм состоит из следующих элементов (рис. 1): электронный блок; наземный радиолокационный запросчик 1Л14; телефон; пусковой крючок с контактной группой; вилка разъёма; кнопка «СЕЛЕКТОР»; ось; стопорное устройство; корпус. 102 Рис. 1. Устройство пускового механизма: 1 – кнопка «Селектор»; 2 – рычаг сброса; 3 – ось; 4 – вилка разъема; 5 – ВЧразъем антенны НРЗ; 6 – стопорное устройство; 7 – телефон; 8 – НРЗ 1Л14; 9 – светодиод «Неиспр»; 10 – крышка переключателей кодов; 11 – тумблер «Вкл» НРЗ; 12 – пусковой крючок Конструкция пускового механизма Рассмотрим характеристику элементов пускового механизма. Электронный блок ПМ предназначен для выполнения следующих функций: разгона ротора гироскопа ОГС; автоматического арретирования и разарретирования гироскопа; обработки и оценки сигналов информации и коррекции, поступающих с ОГС; формирования сигналов звуковой и световой информации при наличии цели в поле зрения ОГС; подачи напряжений на пусковые устройства. Электронный блок размещен внутри корпуса. Наземный радиолокационный запросчик 1Л14 предназначен для определения государственной принадлежности воздушных целей к своим Вооруженным Силам. По информации с НРЗ электронный блок ПМ обеспечивает блокировку пуска ракеты по цели, отвечающей кодом «свой». НРЗ выполнен в виде отдельного блока и крепится к крышке корпуса снизу. В корпусе НРЗ (с левой стороны) установлен светодиод, светящийся при наличии неисправности НРЗ. Под крышкой расположены переключатели кодов АМИ/ГИ, устанавливаемые в положения согласно действующему расписанию. В случае необходимости работы без НРЗ на корпусе ПМ установлен закрытый крышкой тумблер, предназначенный для отключения НРЗ. Включённому состо103 янию НРЗ соответствует установка тумблера в верхнее положение «Вкл», которое указано на корпусе ПМ. Телефон предназначен для подачи звуковой информации о захвате цели ОГСН. Он закреплён в корпусе ПМ крышкой и винтами. Пусковой крючок с контактной группой предназначен для замыкания электрических цепей контактной группы. Пусковой крючок может находиться в одном из трёх положений: исходном (АР — арретир); среднем (РР — разрешение разарретирования); до упора (РП — разрешение пуска). Возврат пускового крючка в исходное положение производится рычагом сброса. Для стрельбы в режиме «РУЧНОЙ» необходимо перевести пусковой крючок из исходного положения в среднее и задержать его в этом положении не менее 0,6 с. Если сигнал от цели достаточной величины, то происходит разарретирование ротора гироскопа и появляются сигналы световой и звуковой информации. ОГСН автоматически сопровождает цель. При переводе пускового крючка в положение до упора производится пуск ракеты. Для стрельбы в режиме «Автомат» необходимо за время менее 0,6 с перевести пусковой крючок из исходного положения в положение до упора. Если при этом в поле зрения ОГСН наблюдается цель, то происходит разарретирование ротора гироскопа и появляются сигналы световой и звуковой информации, ОГСН автоматически сопровождает цель. После чего пуск ракеты производится автоматически. В исходном положении пусковой крючок заблокирован рычагом механизма накола. Для разблокировки пускового крючка необходимо рычаг из положения «ИСХОДН» перевести в положение «НАКОЛ». Вилка разъёма предназначена для электрической связи ПМ с трубой. В транспортном или походном положении комплекса без подстыковки пускового механизма к пусковой трубе вилка закрыта крышкой. Кнопка «Селектор» предназначена для отключения логической и временной селекции цели и помехи. При пусках по цели в условиях отсутствия ЛТЦ в весенне-летний период на фоне кучевой облачности, ярко подсвеченной солнцем, а также по малоизлучающим целям типа ДПЛА сигналы на выходе основного и вспомогательного каналов координатора могут быть равны. При этом их отношение Uвк/Uок ≈ 1 воспринимается логикой селекции как отсутствие цели и не позволяет автосопровождение. В этом случае необходимо отключить селекцию кнопкой «Селектор» на пусковом механизме. Стопорное устройство служат для стыковки ПМ с трубой и его стопорения. Фиксатор трубы входит в отверстие корпуса ПМ и запирается зубом стопора под действием пружины. 104 Работа пускового механизма по структурной схеме После подсоединения НБП и подачи питания блок разгона и синхронизации совместно с блоком датчиков трубы и катушками разгона ОГСН производит разгон ротора гироскопа до номинальной частоты вращения (рис. 2). с блока датчиков трубы Пусковой крючок АРП Блок разгона и синхронизации Блок логики Блок реле НРЗ 1Л14-1 Блок сигнала коррекции Обнаружитель цели к ОГСН с ОГСН к ЭВ ПАД, СД, блоку взведения Рис. 2. Структурная схема пускового механизма 9П516-1 Разгон ротора гироскопа осуществляется за счет взаимодействия переменного магнитного поля катушек разгона с постоянным магнитным полем роторамагнита ОГСН. При достижении ротором требуемой частоты вращения срабатывает частотное реле блока разгона, которое отключает блок разгона ПМ и включает систему стабилизации оборотов ротора-магнита ОГСН. Информация о состоянии пускового крючка поступает на блок логики АРП. Автомат разарретирования и пуска может работать как в автоматическом, так и в ручном режимах пуска. Выбор режима пуска осуществляется пусковым крючком (ПК). Если пусковой крючок не нажат, то АРП выдает команду о подключении сигнала, формируемого катушкой заклона, к катушке коррекции. В этом случае ОГСН находится в арретированном состоянии, т.е. ее ось совпадает с направлением заклона. При нажатии пускового крючка до упора (режим «Автомат»), если при этом в поле зрения ОГСН наблюдается цель, то сигнал с ОГСН поступает на обнаружитель и далее – на блок логики АРП. При этом АРП выдает команду на разарретирование ротора гироскопа и формирование сигналов световой и звуковой информации. В течение 0,8 с после разарретирования ротора гироскопа блок логики АРП осуществляет поэтапный анализ сигнала от цели. Во время анализа АРП оценивает: величину сигнала коррекции, который характеризует угловую скорость линии визирования ракета-цель. Эта угловая скорость не должна превышать 12°/с, в противном случае АРП запрещает пуск ракеты. Ограничение 105 по максимальному значению угловой скорости выбрано исходя из аэродинамических возможностей ракеты; превышение сигналом цели сигнала фона более чем в 4 раза; угол между оптической осью гироскопа и продольной осью прицела трубы, который не должен превышать 2°(при точном совмещении оси прицела с линией визирования ракета-цель); информацию НРЗ, по которой определяется гос. принадлежность цели. Если в течение 0,8 с после разарретирования ротора гироскопа ОГСН отслеживает цель, уровень сигнала от цели превышает уровень сигнала от фона более чем в 4 раза, точность прицеливания не хуже 2°, и от НРЗ не поступает сигнал «свой», то АРП выдает сигнал на блок реле, электровоспламенитель (ЭВ) ПАД и блок взведения. Через 0,72 с (после выхода на режим БИП), с блока реле напряжение подается на ЭВ стартового двигателя и ракета стартует. Если тепловое излучение цели не превышает излучения фона, то ротор гироскопа периодически арретируется, лампа световой индикации на задней стойке мигает и синхронно с ней прерывается звуковой сигнал в телефоне ПМ. Режим периодического арретирования ОГСН необходим для осуществления перезахвата цели. Большая величина угловой скорости линии визирования будет иметь место в том случае, если при движении цели стрелок не достаточно точно сопровождает цель, что приводит к различным угловым скоростям оси ОГСН и оси ПТ. Если л 12 град/с , то АРП задерживает пуск ракеты до тех пор, пока, за счет точного сопровождения цели, л не уменьшится до 12 град/с. Для обеспечения работы АРП в режиме «Ручной», необходимо перевести пусковой крючок из исходного положения (АРР) в среднее положение, задержать его в этом положении (РР) на время не менее 0,6 с, а затем перевести в положение до упора (РП). В этом режиме в АРП отключаются блоки, запрещающие пуск ракеты по целям, похожим на фоновые образования. Наземный радиолокационный запросчик 1Л14 До 80-х годов 20 в. на вооружении Советской Армии состояла система радиолокационного опознавания «Кремний», в состав которой входили наземные радиолокационные запросчики (НРЗ), установленные на РЛС, и самолетные радиолокационные ответчики (СРО), размещенные на воздушных объектах. Данная система производила определение государственной принадлежности воздушных объектов. Число кодовых комбинаций составляло 36. Противник, установив на воздушный объект соответствующую аппаратуру, путем перебора всех комбинаций, имел возможность подбирать правильный код. Этот режим называется режим общего неимитостойкого опознавания (ОО). 106 Для повышения имитостойкости была разработана и принята на вооружение система радиолокационного опознавания «Пароль», в которой остался режим ОО и введен второй режим − имитостойкого, гарантированного опознавания (ГО). В данном режиме запросный сигнал формируется случайным образом, а ответный код формируется по определенному правилу, которое хранится в секрете. Данное правило имеется на НРЗ и на СРО. Разрядность ответного кода такова, что число возможных комбинаций составляет 1012. Подобрать такой код практически не возможно. Система «Пароль» работает в двух частотных диапазонах – в III и VII. В III диапазоне обеспечивается только 1 режим, а в VII диапазоне –1 и 2 режимы. Наземный радиолокационный запросчик 1Л14-1 предназначен для определения государственной принадлежности воздушных целей к своим Вооруженным Силам, оборудованных ответчиками систем опознавания «Кремний», «Кремний2М» и III частотного диапазона системы «Пароль». НРЗ 1Л14-1 обеспечивает работу в режиме общего неимитостойкого опознавания. Технические характеристики НРЗ 1Л14-1: время готовности НРЗ, с максимальная дальность опознавания, м минимальная высота опознавания целей, м разрешающая способность опознавания по азимуту, град разрешающая способность опознавания по дальности, км время опознавания цели, с 3,5 5000 10 25 3,6 0,3 НРЗ выполнен в виде отдельного блока, закрепленного в нижней части ПМ. На корпусе НРЗ установлены: светодиод «Неисправность», светящийся при наличии неисправности НРЗ; под крышкой НРЗ установлены переключатели кодов АМИ, ГИ, устанавливаемые в положения согласно действующему расписанию (рис. 3); тумблер отключения НРЗ. Рис. 3. Переключатели кодов АМИ и ГИ 107 Структура запросных и ответных сигналов 1 режим III диапазона. Работа НРЗ ПЗРК «Игла» соответствует 1 режиму работы системы радиолокационного опознавания «Кремний». Несущая частота НРЗ соответствует III частотному диапазону (668 МГц). Запросный сигнал в 1 режиме III диапазона состоит из трех импульсов одинаковой длительности на частоте f1 и не имеет модуляции (рис. 4). III диапазон (f1=668 МГц) 0.3 y ( x) y ( x) y ( x) 1 0.3 sin( x) 1 0.3 sin( x) 1 0.3 sin( x) 1 0.3 sin( x) 1 0.3 sin( x) 1 0.3 sin( x) 0.3 Запрос 0.3 U(t) 0.3 sin( 6x) 0.3 sin( 6x) 0.3 sin( 6x) t x x x 0.3 0.3 0 y ( x) 1 0.3 sin( x) 1 0.3 sin( x) 1 0.3 sin( x) 0.3 0 x Fк – 6 значений 1.3 y ( x) Ответ 0 x 15 x 0.3 t10.3 , t2 – 6 значений 15 15 n=36 комбинаций y ( x) 1 0.3 sin( x) 1 0.3 sin ( x) 0.3 sin( 6x) 0.3 sin( 6x) t 1 0.3 sin ( x) x 1.3 x 0.3 t1 0 t2 0 x 15 0.3 0 x x 15 15 Рис. 4. Структура запросных и ответных сигналов в 1 режиме III диапазона Ответный сигнал общего опознавания в 1 режиме III диапазона состоит из импульса, модулированного по амплитуде напряжением кодовой частоты (АМИ – амплитудно-модулированные импульсы), и двух немодулированных (гладких) импульсов с временным разносом t1, t2. В системе «Пароль» используются шесть значений кодовой частоты и шесть значений временного разноса гладких импульсов (т.о. n = 36). Структурная схема НРЗ включает (рис. 5): передающее устройство, формирующее ВЧ импульсы запроса; приемное устройство, обеспечивающее прием и первичную обработку ответных сигналов радиолокационного ответчика воздушной цели; шифратор, формирующий тройки запросных видеоимпульсов; дешифратор, обеспечивающий формирование сигнала СВОЙ при приеме ответных сигналов с их расстановкой согласно расписанию кодов; схема контроля, формирующая сигнал НЕИСПРАВНОСТЬ при нарушении работы приемопередающего тракта; антенно-фидерное устройство, обеспечивающее прохождение, излучение и прием ВЧ сигналов; переключатель кодов, служащий для установки кодов АМИ, ГИ дешифратора. 108 Передающее устройство Антеннофидерное устройство Шифратор Блок логики ПМ «Неиспр. НРЗ» Схема контроля АМ Приемное устройство Дешифратор Блокировка НРЗ ГИ Переключатель кодов Рис. 5. Структурная схема НРЗ 1Л14-1 Функционирование НРЗ происходит следующим образом. Во время четвертого этапа анализа сигналов (0,2 с) блок логики ПМ запускает шифратор, который формирует пачки запросных импульсов. Эти импульсы поступают на передающее устройство, которое формирует соответствующие им пачки высокочастотных запросных импульсов, излучаемые антенно-фидерным устройством в направлении цели. Если в ответчике своей цели установлен код согласно расписанию, то в ответных пачках (по три импульса в пачке) высокочастотных импульсов временные интервалы между импульсами будут соответствовать требуемым. Принятые антенно-фидерным устройством эти импульсы поступают в приемное устройство, которое выделяет огибающую этих импульсов и подает их на дешифратор. Дешифратор оценивает соответствие временных интервалов этих импульсов временным интервалам, задаваемым положением переключателей АМ, ГИ. Если эти условия соблюдаются, дешифратор вырабатывает сигнал «СВОЙ» для блока логики. Этот сигнал используется для блокировки пуска ракеты. 109 Рис. 6. Структурная схема дешифратора АМИ 2.11. ЭЛЕКТРОННЫЙ БЛОК ПУСКОВОГО МЕХАНИЗМА Задачи, решаемые пусковым механизмом 9П516-1 по подготовке к пуску и осуществлении пуска ракет 9М39, осуществляются электронным блоком, размещенным внутри пускового механизма. При подготовке к пуску электронный блок ПМ обеспечивает разгон ротора гироскопа ОГСН до требуемой частоты. При отсутствии сигнала автоматически производит электрическое арретирование, а при наличии сигнала – разарретирование гироскопа. Также электронный блок производит обработку и оценку сигналов, поступающих с ОГСН. При наличии в поле зрения ОГСН сигнала цели электронный блок формирует сигналы звуковой и световой информации. При пуске ракеты электронный блок выдает напряжения на пусковые устройства. Назначение, состав электронного блока ПМ Электронный блок ПМ предназначен для выполнения следующих функций: разгона ротора гироскопа ОГСН; автоматического арретирования и разарретирования гироскопа; 110 обработки и оценки сигналов информации и коррекции, поступающих с ОГСН; формирования сигналов звуковой и световой информации при наличии цели в поле зрения ОГСН; подачи напряжений на пусковые устройства. Электронный блок имеет следующий состав: блок разгона и синхронизации; автомат разарретирования и пуска (АРП): блок реле. Блок разгона и синхронизации совместно с блоком датчиков трубы и катушками вращения ОГСН осуществляет разгон ротора гироскопа до требуемой частоты вращения (100 об/с) и отключение разгонного устройства при достижении этой частоты. Автомат разарретирования и пуска производит автоматическое арретирование и разарретирование ротора гироскопа ОГСН. Также АРП производит анализ сигнала от цели и, в зависимости от результатов анализа, формирует звуковые и световые сигналы информации и выдает команду на пуск. Принцип действия АРП основан на поэтапном анализе четырех параметров сигнала от цели в течение 0,8 с. Длительность каждого этапа равна 0,2 с. Во время анализа АРП оценивает: величину сигнала коррекции, который характеризует угловую скорость линии визирования ракета-цель. Эта угловая скорость не должна превышать 12°/с, в противном случае АРП запрещает пуск ракеты. Ограничение по максимальному значению угловой скорости выбрано исходя из аэродинамических возможностей ракеты; превышение сигналом цели сигнала фона более чем в 4 раза; угол между оптической осью гироскопа и продольной осью прицела трубы, который не должен превышать 2°(при точном совмещении оси прицела с линией визирования ракета-цель); информацию НРЗ, по которой определяется принадлежность цели. После разгона ротора АРП обеспечивает арретирование гироскопа, при этом его оптическая ось совмещается с осью прицела. При совмещении оси прицела трубы с целью цель будет находиться в поле зрения ОГС, с выхода которой на вход АРП будет поступать сигнал от цели. АРП может работать как в автоматическом, так и в ручном режимах, переключение которых осуществляется пусковым крючком. Для работы АРП в автоматическом режиме необходимо за время менее 0,6 с перевести пусковой крючок из исходного положения до упора, при этом происходит разарретирование ротора гироскопа, и при наличии цели в поле зрения ОГС появляются сигналы звуковой и световой информации. В течение 0,8 с после разарретирования ротора гироскопа ОГС осуществляет поэтапный анализ сигнала от цели. 111 Если в течение 0,8 с сигнал от цели превышает сигнал фона, ОГС отслеживает цель, угловая скорость линии визирования ракета-цель не превышает 12°/с, угол между оптической осью гироскопа и осью прицела меньше 2° (при точном совмещении оси прицела с линией визирования ракета-цель), с НРЗ не поступает информация, что цель «своя», то срабатывает АРП. При этом напряжение подается на блок реле, а с него на электровоспламенитель ПАД, блок взведения и электровоспламенитель стартового двигателя. Если излучение от цели не превышает сигнала от фона, то ротор гироскопа периодически арретируется, лампа световой информации на трубе мигает. Это свидетельствует о недостаточной величине излучения от цели для слежения ОГС. Режим периодического арретирования ОГС необходим для осуществления перезахвата цели. Если угловая скорость линии визирования ракета-цель больше 12°/с, АРП задерживает пуск ракеты до тех пор, пока угловая скорость цели не уменьшится до 12°/с. Для обеспечения работы АРП в режиме «РУЧНОЙ» необходимо перевести пусковой крючок из исходного положения в среднее и задержать его в этом положении не менее 0,6 с, а затем перевести в положение до упора. Блок реле предназначен для подачи напряжений по команде с АРП в пусковые цепи ПАД, стартового двигателя и блока взведения. Блок разгона и синхронизации Блок разгона и синхронизации (БРС) предназначен: для разгона ротора гироскопа ОГСН (совместно с блоком датчиков трубы и катушками разгона ТГСН) до определенной частоты вращения и отключения схемы разгона при достижении этой частоты; выработки постоянного напряжения – 80 В, используемого для питания фоторезисторов основного и вспомогательного каналов ОГСН при подготовке ракеты к пуску. В состав функциональной схемы БРС входят (рис. 1): преобразователь напряжения; схема разгона; частотное реле. Преобразователь напряжения предназначен для получения: постоянного напряжения – 80 В, используемого для питания фоторезисторов основного и вспомогательного каналов ТГСН; напряжения смещения, используемого в схеме разгона; переменного напряжения высокой частоты (~100 кГц) для датчиков положения ротора-магнита гироскопа. Принцип работы преобразователя напряжения заключается в следующем. При подаче с НБП напряжений ± 20 В начинает работать двухтактный генератор, который формирует гармоническое напряжение с частотой ~100 кГц. Дан112 ное напряжение повышается на вторичной обмотке II трансформатора Тр1, выпрямляется диодным выпрямителем и сглаживается фильтром, в результате чего образуется постоянное напряжение – 80 В. Данное напряжение подается на фоторезисторы основного и вспомогательного каналов. Со вторичной обмотки III трансформатора Тр1 снимается переменное напряжение, выпрямляется диодным выпрямителем II, сглаживается фильтром и подается на схему разгона. Одновременно переменное напряжение с вторичной обмотки III трансформатора Тр1 поступает на блок датчиков трубы для формирования управляющих сигналов. Блок разгона и синхронизации с НБП + 20 В I ‒ 20 В Выпрямитель Фильтр II I Двухтактный генератор Выпрямитель Фильтр II Тр1 III Uсм Схема разгона Преобразователь напряжения − 80 В ПТ 9П39 Блок датчиков Ротор-магнит Детекторы Д1-Д4 Усилителиограничители Схема переключения Ключевые каскады VT4-VT7 Катушки разгона Частотное реле ФП ОК ФП ВК Формирователь импульсов Пороговое устройство Дифференцирующая цепочка Исполнительный каскад ОГСН 9Э410 Р1 к АРП Рис. 1. Функциональная схема блока разгона и синхронизации Схема разгона предназначена для поочередной коммутации тока через катушки разгона по информационным сигналам с датчиков положения (ДП). В состав схемы разгона входят четыре детектора сигналов с ДП1-ДП4, усилителиограничители, схема переключения и ключевые каскады, нагрузкой которых являются катушки разгона ТГСН. Датчики положения ДП1-ДП4 расположены в передней части пусковой трубы 9П39 (блок датчиков). Каждый датчик (рис. 2) состоит из дросселя, обмотка которого намотана на ферромагнитном сердечнике, и обмотки подмагничивания, размещенной на каркасе. С помощью обмотки подмагничивания создается по113 стоянное магнитное поле, которое, складываясь с магнитным полем вращающегося ротора-магнита увеличивает или уменьшает реактивное сопротивление дросселя. Этим обеспечивается требуемая чувствительность датчика положения. Величина поля подмагничивания устанавливается подбором резистора R, общего для всех ДП. Величина падения высокочастотного напряжения на дросселе ДП зависит от индуктивности дросселя, которая меняется в зависимости от положения полюсов ротора-магнита относительно ДП. 1 2 3 4 R 1 2 3 4 Рис. 2. Датчик положения полюсов ротора-магнита: 1 – каркас; 2 – ферромагнитный сердечник; 3 – обмотка дросселя; 4 – обмотка подмагничивания При вращении ротора-магнита на выходе ДП возникают амплитудномодулированные сигналы. Огибающие этих сигналов сдвинуты друг относительно друга на 90°, так как ДП1 – ДП4 расположены на поверхности пусковой трубы симметрично. В зависимости от положения полюсов ротора-магнита относительно ДП на дроссель будет воздействовать изменяющееся магнитное поле. Так как ДП1-ДП4 расположены симметрично вокруг передней части трубы диаметрально противоположно друг другу, то на их выходах, в зависимости от текущего положения полюсов ротора-магнита, возникают амплитудномодулированные сигналы, огибающие которых сдвинуты относительно друг друга на 90° (рис. 3). Детекторы Д1-Д4 выделяют огибающую этих сигналов. Далее огибающие сигналов поступают на усилители-ограничители, где формируются сигналы, близкие по форме к прямоугольным импульсам. 114 u(t) 0 π π/2 3/2π ДП1 t ДП2 t ДП3 t ДП4 t Рис. 3. Сигналы, действующие на датчиках положения Этими импульсами через схему переключения управляются транзисторы VТ4–VТ7 ключевых каскадов схемы разгона. Поочередное открывание ключевых каскадов приводит к поочередному протеканию тока в противоположных направлениях через катушки разгона ОГСН. Частотное реле предназначено для отключения схемы разгона при достижении ротором гироскопа требуемой частоты вращения fг = 85-109 Гц. Поддержание частоты вращения в требуемой пределах осуществляется системой стабилизации оборотов ротора гироскопа ОГСН. В состав схемы частотного реле входят: формирователь импульсов; дифференцирующая цепочка; пороговое устройство; исполнительный каскад, нагрузкой которого является реле Р1. Формирователь импульсов служит для формирования прямоугольных импульсов, частота следования и длительность которых соответствуют частоте вращения ротора гироскопа. Входными сигналами формирователя импульсов являются сигналы с коллектора одного из транзисторов ключевого каскада (рис. 4). 115 а) U(t) t б) в) t t г) t д) t Рис. 4. Эпюры сигналов схемы частотного реле: а – импульсы с выхода ключевого каскада системы разгона; б – импульсы с выхода формирователя импульсов; ; в – импульсы с выхода дифференцирующей цепочки; г – напряжение с выхода порогового устройства; д – напряжение с выхода исполнительного каскада По мере разгона ротора гироскопа частота повторения импульсов формирователя увеличивается, а их длительность уменьшается. Данные импульсы подаются на дифференцирующую цепочку, где преобразуются в короткие импульсы разной полярности. Импульсы с дифференцирующей цепочки подаются на пороговое устройство (рис. 5), которое служит для формирования сигнала срабатывания исполнительного каскада. Пороговое устройство ‒ Есм R1 Исполнительный каскад ‒ Ек ‒ Ек На схему разгона ‒ 20 В Р1 R2 VT8 к АРП VT9 с дифф. цепочки VD18 С8 ‒ Есм С7 R4 Рис. 5. Схема порогового устройства и исполнительного каскада 116 Пороговое устройство работает следующим образом. На базу транзистора VT9 подано отрицательное напряжение смещения, удерживающее транзистор в открытом состоянии. По мере возрастания частоты вращения ротора гироскопа возрастает и частота следования положительных импульсов с дифференцирующей цепочки, которые накапливаются на конденсаторе С8, что приводит к возрастанию напряжения на базе транзистора. При достижении ротором гироскопа требуемой частоты вращения положительное напряжение на конденсаторе С8 становится равным по модулю отрицательному напряжению смещения. Суммарное напряжение на базе транзистора становится равным нулю и транзистор закрывается. Исполнительный каскад работает следующим образом. Когда транзистор VT9 открыт (частота вращения ротора не достаточна), напряжение на его коллекторе равно нулю. На эмиттере транзистора VT8 действует отрицательное напряжение смещения, определяемое стабилитроном VD18. Если на конденсаторе С7 напряжение равно нулю, то за счет отрицательного напряжения смещения на эмиттере напряжение на базе ‒ положительное относительно эмиттера. Транзистор VT8 закрыт. Ток по обмотке реле Р1 не течет и через его нормально замкнутые контакты напряжение ‒ 20 В подается на схему разгона. Когда частота вращения ротора достигает необходимой величины, транзистор VT9 закрывается и начинает заряжаться конденсатор С7 отрицательным напряжением. Когда напряжение на конденсаторе С7 превысит напряжение смещения на эмиттере, транзистор VT8 открывается. Срабатывает реле Р1 и своими контактами отключает питание со схемы разгона. Одновременно реле Р1 выдает сигнал на АРП об окончании разгона. Дальнейшее поддержание требуемой скорости вращения ротора гироскопа обеспечивается системой стабилизации оборотов ОГСН. Автомат разарретирования и пуска Автомат разарретирования и пуска предназначен для: автоматического арретирования и разарретирования ротора гироскопа ТГСН; анализа сигнала от цели после разарретирования ротора гироскопа; формирования звукового и светового сигналов информации (СИ) о наличии излучения цели в поле зрения ТГСН; автоматического включения блока реле. В состав АРП входят (рис. 6): блок сигналов коррекции; обнаружитель цели; блок логики; тракт арретира. 117 Блок сигналов коррекции (БСК) предназначен для выработки напряжения постоянного тока, пропорционального угловой скорости визирования ракета-цель и логических сигналов при выполнении неравенств ε л 1,5 град/с и ε л 12 град/с . В состав БСК входят усилитель сигналов коррекции, детектор и два пороговых устройства разарретирования (ПУР) – по максимальной и минимальной угловым скоростям ( ε л min , ε л max ). Функционирование БСК происходит следующим образом. Входным сигналом БСК является сигнал коррекции с ОГСН, который пропорционален угловой скорости линии визирования «ракета-цель». После усиления этот сигнал поступает на детектор, где формируется постоянное напряжение, пропорциональное амплитуде сигнала, а, следовательно, и величине угловой скорости линии визирования «ракета-цель». Далее напряжение с детектора поступает на ПУР по минимальной и максимальной угловым скоростям. Пороговое устройство разарретирования по минимальной угловой скорости формирует логический сигнал разарретирования для блока логики при выполнении следующих условий: ε л 1,5 град/с в режиме пуска «Автомат»; при любом значении ε л в режиме пуска «Ручной». Пороговое устройство разарретирования по максимальной угловой скорости формирует логический сигнал разрешения пуска для блока логики при ε л 12 град/с . 118 Блок сигналов коррекции Сигнал коррекции Усилитель С контактной группы пускового крючка ПУР по ε л min Детектор ПУР по ε л max Блок логики РП (автомат) РП Электронное реле времени анализа (0,8 с) РР АРР 0,2 с 0,2 с Схема автоматического разарретирования РП (ручной) 0,2 с 0,2 с Схема оценки надежности слежения Схема анализа сигнала коррекции к НРЗ от НРЗ Схема анализа «свой-чужой» ГОН1 Схема пуска Схема сигналов информации Обнаружитель цели к блоку реле Селектор ОК ВК к ОГСН с ОГСН Схема анализа признака ЗУР Запоминающее устройство с частотного реле ПМ с катушки пеленга Увод Разарретирование Откл. селект. Усилитель с электронным реле Схема «И» Схема «ИЛИ» Схема «И» Тракт арретира φ ≤ 2° Коммутатор сигналов арретирования Усилитель сигналов арретирования Лампа СИ Блок датчиков (ДП1-4, обмотки катушек заклона 5° и 10°) к усилителю коррекции ОГСН Пусковая труба Рис. 6. Функциональная схема автомата разарретирования и пуска Тракт арретира предназначен для коммутации цепей сигналов арретирования при разгоне ротора гироскопа, прицеливании и захвате цели на автосопровождение ОГСН. В состав тракта арретира входят коммутатор и усилитель сигналов арретирования. Входными сигналами коммутатора являются сигналы с катушки пеленга ОГСН и обмоток заклона 5° и 10°, а переключающими: сигнал с частотного реле БРС об окончании разгона ротора гироскопа и сигнал с контактной группы пускового крючка о его текущем положении. Функционирование тракта арретира происходит следующим образом. Во время разгона ротора гироскопа и нахождения пускового крючка в исходном положении коммутатор сигналов арретирования подключает к усилителю сигнал 119 с катушки пеленга. После усиления этот сигнал поступает на усилитель коррекции КЦ ОГСН, нагрузкой которого является катушка коррекции. В катушке коррекции создается внешний момент, под действием которого ротор гироскопа прецессирует в направлении уменьшения ошибки рассогласования (угла пеленга) со скоростью, пропорциональной этой ошибке, что позволяет установить оптическую ось гироскопа вдоль продольной оси ракеты. После окончания разгона ротора гироскопа, о чем свидетельствует наличие сигнала с частотного реле БРС ПМ, коммутатор подключает к усилителю сигналов арретирования, кроме сигнала с катушки пеленга, сигнал с обмотки заклона 5° (ЗАКЛОН 5°) блока датчиков трубы. Так как уровень и фаза сигнала ЗАКЛОН 5° соответствует углу пеленга 5° вверх, то под действием этого суммарного сигнала ротор будет прецессировать вниз на 5°, что позволяет оптической оси гироскопа занять положение 5° выше линии прицеливания для «запоминания» уровня излучения фона в районе цели. При переводе же пускового крючка в первое положение (РР) или до упора (РП) коммутатор подключает к усилителю сигналы с катушки пеленга и обмотки заклона 10° (ЗАКЛОН 10°), под действием которых оптическая ось гироскопа совмещается с линией прицеливания трубы. При этом оптическая ось гироскопа наклонена на 10° ниже оси ракеты. Обнаружитель цели предназначен для формирования логического сигнала о наличии в поле зрения ОГСН излучения цели. В состав обнаружителя цели входят усилитель с электронным реле, запоминающее устройство и логическая схема «И». Входными сигналами обнаружителя цели являются сигналы с предусилителей основного и вспомогательного каналов ОГСН, сигнал отключения селектора организованных помех, признак типа ЗУР (9М39 или 9М313) и сигнал с частотного реле БРС ПМ об окончании разгона ротора гироскопа. Обнаружитель цели формирует сигнал разрешения для схемы автоматического разарретирования блока логики, если одновременно выполняются следующие условия: сигнал от цели и фона превышает сигнал от фона не менее чем в 4 раза (определяется усилителем с электронным реле); с частотного реле БРС выдан сигнал об окончании разгона ротора гироскопа. Для определения соотношения сигналов от цели и фона к сигналу от фона используется запоминающее устройство. При прицеливании и нахождении пускового крючка в исходном положении (АР) оптическая ось гироскопа с помощью тракта арретира направлена на 5° выше цели. В этом случае запоминающее устройство обнаружителя цели фиксирует уровень излучения фона в районе цели. При переводе пускового крючка в положение РР или РП оптическая ось гироскопа совмещается с линией прицеливания и на усилитель с электронным реле поступает сигнал, пропорциональный уровню излучения цели и фона. Если этот 120 сигнал превышает запомненный сигнал излучения фона не менее чем в 4 раза, то срабатывает электронное реле, сигнал с которого через схему «И» поступает на схему автоматического разарретирования блока логики. Кнопкой «Селектор» производится отключение селектора организованных помех в период высокой солнечной активности при наличии кучевых облаков, когда уровень фона становится соизмеримым с уровнем сигнала. Блок логики предназначен для анализа сигналов по определенному алгоритму, автоматического разарретирования ротора гироскопа ОГСН и формирования команды на пуск ракеты при положительных результатах анализа в режимах пуска «Автомат» и «Ручной». Электронное реле времени анализа предназначено для формирования четырех последовательных интервалов времени длительностью по 0,2 с каждый и одного из сигналов РАЗРЕШЕНИЕ ПУСКА (АВТОМАТ или РУЧНОЙ). Началом формирования интервалов времени является перевод пускового крючка в положение РР или РП. В зависимости от времени перевода пускового крючка из исходного положения (АРР) в положение до упора (РП) формируется один из сигналов: «РП Автомат» или «РП Ручной». Если это время меньше 0,6 с, формируется сигнал «РП Автомат», в противном случае – «РП Ручной». При этом сигнал «РП Автомат» формируется по истечении 0,6 с от момента перевода пускового крючка из положения АРР в положение РП, а сигнал «РП Ручной» ‒ сразу же после перевода пускового крючка из положения РР в положение РП. Схема автоматического разарретирования предназначена для автоматического разарретирования ротора гироскопа через 0,2 с при наличии на ее входах сигналов: с обнаружителя цели; признака РР с контактной группы пускового крючка; с порогового устройства разарретирования (ПУР) по ε л min . Для начального разарретирования ОГСН вместо разрешающего сигнала с ПУР по ε л min используется сигнал блокировки со схемы анализа сигнала коррекции, подаваемый на время переходных процессов в блоке сигналов коррекции (0,2 с). С выхода схемы автоматического разарретирования команда «Разарретировать» выдается на ОГСН. По этой команде от усилителя коррекции ОГСН отключается сигнал арретирования и подключается сигнал ошибки, что переводит ОГСН в режим «Слежение». Одновременно сигнал подается на схему оценки надежности слежения. Схема оценки надежности слежения предназначена для формирования сигнала «Увод», служащего для проверки надежности слежения ОГСН за целью. С катушки ГОН снимается гармоническое напряжение с частотой вращения ротора и с амплитудой, соответствующей угловой скорости линии визирования 4 град/с (сигнал «Увод»). Этот сигнал подается на ОГСН. Если срыва сопровож121 дения не происходит, то с обнаружитель цели формирует сигнал, свидетельствующий о надежном слежении. Одновременно, в случае прихода с обнаружителя сигнала о надежном сопровождении, схема оценки надежности слежения формирует сигнал, который подается на схему анализа сигнала коррекции. Схема анализа сигнала коррекции, представляющая собой логическую пороговую схему, обеспечивает формирование первой составляющей команды «Пуск» ( ε л max 12 град/с ) и блокировки схемы автоматического разарретирования при поступлении на нее разрешающего сигнала с ПУР по ε л max . Если ε л max 12 град/с , схема анализа сигнала коррекции задерживает формирование первой составляющей команды «Пуск» до тех пор, пока угловая скорость линии визирования цели не уменьшится до 12 град/с. Схема сигналов информации предназначена для формирования звукового и светового сигналов информации о переводе ОГСН в режим «Слежение» и наличии сигнала «свой» с НРЗ. Входными сигналами являются сигналы со схемы оценки надежности слежения и со схемы анализа «свой-чужой». Если сигнал от цели и фона превышает сигнал фона не менее, чем в 4 раза, то сигнал со схемы «И» обнаружителя подается на схему автоматического разарретирования. Если ε л 1,5 град/с , то сигнал с ПУР по ε л min также подается на схему автоматического разарретирования. При наличии этих сигналов схема автоматического разарретирования формирует сигнал, который через схему оценки надежности слежения подается на схему сигналов информации. При этом формируются непрерывные световые и звуковые сигналы. Если же эти условия не выполняются, то схемы автоматического арретирования и анализа сигнала коррекции будут периодически (через 0,4 с) производить арретирование и разарретирование ротора гироскопа и синхронно с этим (с частотой 2,5 Гц) будут прерываться сигналы информации. При наличии же сигнала «свой» с НРЗ схема информации осуществляет периодическое прерывание сигналов информации с частотой 12,5 Гц. Схема пуска предназначена для формирования сигнала запуска блока реле ПМ и представляет собой две логические схемы «И» и «ИЛИ». На вход схемы «ИЛИ» поступает один из сигналов – РП АВТОМАТ или РП РУЧНОЙ, свидетельствующий о нажатии пускового крючка до упора. Выходной сигнал схемы «ИЛИ» является одной из составляющих входов схемы «И». Схема «И» обеспечивает формирование сигнала запуска блока реле ПМ при одновременном выполнении следующих условий (составляющих команды «Пуск»): 1) угловая скорость линии визирования ракета-цель меньше 12 град/с; 2) со схемы анализа «свой-чужой» выдан сигнал об отсутствии признака цели СВОЙ; 3) со схемы «ИЛИ» выдан сигнал о нажатии пускового крючка до упора. 122 Блок реле Блок реле предназначен для задержки подачи импульса тока на электровоспламенитель (ЭВ) стартового двигателя (СД) и отключения цепи ЭВ ПАД и НБП от бортовой аппаратуры ракеты. Блок реле состоит из двух электронных реле времени (ЭРВ) 1 и 2, нагрузкой которых являются электромагнитные реле Р2 и Р3 (рис. 7). Первая электронная задержка обеспечивает: задержку подачи напряжения на вторую электронную задержку на время 0,6 с, т.е. на время выхода на режим БИП; отключения НБП от бортовой аппаратуры ракеты; отключения цепи ПАД. Вторая электронная задержка обеспечивает задержку старта ракеты на время 0,16 с, в течение которого в бортовой аппаратуре ракеты заканчиваются переходные процессы, вызванные отключением НБП и переходом к питанию от БИП. Функционирует блок реле следующим образом. В первоначальный момент времязадающий конденсатор С12 ЭРВ1 не заряжен и транзистор VT1 закрыт положительным напряжением смещения. Тиристор VD1 закрыт, реле Р2 обесточено и через его нормально замкнутые контакты 4-3 питание с НБП подается на ОГСН. Электронное реле времени 1 (0,6 с) + Uсм с НБП Электронное реле времени 2 (0,16 с) – Uк к ОГСН к ЭВ ПАД + Uэ VT1 с АРП С13 VD1 VT2 VD24 С12 Р2 5 4 3 6 7 8 + Uсм Р3 1 2 6 ЭВ СД Контактная плата ПТ R1 7 8 5 4 3 R2 Рис. 7. Принципиальная схема блока реле При поступлении управляющего сигнала с АРП напряжение через нормально замкнутые контакты 7-8 поступает к ЭВ ПАД и приводит его в действие. При этом начинает работать БИП. Одновременно конденсатор С12 начинает заряжаться отрицательным напряжением, и когда напряжение на нем превысит напряжение смещения (через 0,6 с), транзистор VT1 открывается, что приводит к 123 срабатыванию тиристора и включенного в его цепь реле Р2. Реле Р2 срабатывает и своими контактами коммутирует следующие цепи: через замкнувшиеся контакты 6-7 подается напряжение на базу транзистора VT2 ЭРВ2 и через диод VD24 на самоблокировку реле Р2; разомкнувшимися контактами 7-8 снимается питание с ЭВ ПАД; разомкнувшимися контактами 3-4 отключается напряжение НБП от бортовой аппаратуры ракеты. До срабатывания Р2 времязадающий конденсатор С13 ЭРВ2 не заряжен и транзистор VT2 закрыт положительным напряжением смещения. При замыкании контактов 6-7 реле Р2 конденсатор С13 начинает заряжаться и когда напряжение на нем превысит напряжение смещения (через 0,16 с) транзистор открывается, что приводит к срабатыванию реле Р3. В исходном состоянии контакты ЭВ СД замкнуты (во избежание случайного срабатывания) контактами реле Р3 3-4, 7-8. При срабатывании реле Р3 размыкается цепь блокировки ЭВ СД, а замкнувшиеся контакты (4-5, 6-7) замыкают цепь подачи питания на ЭВ СД через резисторы R1, R2 контактной платы трубы. При срабатывании ЭВ СД ракета стартует. 2.12. ВЗАИМОДЕЙСТВИЕ БОЕВЫХ СРЕДСТВ КОМПЛЕКСА В комплексе ПЗРК 9К38 на обстрел воздушной цели накладываются следующие ограничения: цель должна быть визуально наблюдаемой и теплоизлучающей. При этом предусмотрены режимы стрельбы: «Автомат» или «Ручной». Кроме того, возможен пуск навстречу или вдогон. В режиме «Автомат» момент пуска ракеты определяется ПМ, а в режиме «Ручной» – стрелком-зенитчиком. При стрельбе вдогон перед пуском нажимается кнопка ВДОГОН. При этом уменьшаются коэффициент передачи контура управления, что приводит к уменьшению крутизны траектории полета ЗУР. На занятии будет изучена работа элементов ПЗРК до вылета ЗУР из пусковой трубы и в полете. Работа элементов ПЗРК до вылета ЗУР из пусковой трубы Взаимодействие боевых средств ПЗРК рассмотрим по структурной схеме (рис. 1). 124 ОГСН От блока датчиков ПТ ССО Гироскопический блок ФП ВК ФП ОК Электронный блок Система охлаждения ПАД Селектор ДУС с усилителем Взрыватель 9Э249 Трубка II режим 6,6 с I режим 1,9 с Лучевой воспламенитель замедленного действия ЭВ Блок взведения Катушка пеленга Обмотки коррекции БИП СДУ МДУ Боевое снаряжение ПУД РМ Детонатор Катушка ГОН Катушка вращения ВГ Рулевой отсек Катушка разгона Блок Обмотка датчиков заклона Антенна НРЗ СК АРП НАКОЛ ея тар Ба Аз от ДН ИСХО Блок сигналов коррекции Блок логики Блок разгона и синхронизации Блок реле Тракт арретира Обнаружитель цели ВКЛ НРЗ Тракт арретира Рис. 1. Функциональная схема боевых средств ПЗРК 9К38 Циклограмма работы боевых средств ПЗРК 9К38 Операции Время, с 1. Включение НБП Начало 2. Выход электробатареи НБП на режим 0,3-1 3. Арретирование оси гироскопа ОГСН 2,4 4,64 4. Выход микрохолодильника на режим 5. Прицеливание, сопровождение цели, нажатие пускового крючка до РР (РП) 3 5 6. Разгон ротора гироскопа ОГСН 0,1 7. Захват цели координатором ОГСН 0,4 8. Анализ ПМ по ε л и сигналам ОК и ВК 9. Анализ ПМ точности сопровождения ОГСН. Включение НРЗ 0,2 0,2 10. Отключение АРП. Запуск БИП 11. Выход БИП на режим 0,72 7,62 12. Старт ЗУР Окончание Приведение в действие НБП. При принятии решения на обстрел визуально наблюдаемой цели стрелок-зенитчик путем поворота рычага накола НБП в положение «Накол» приводит в действие НБП 9Б238. Хладагент (сжатый азот) из баллона поступает в охлаждающее устройство ФП ОК ОГСН и в механизм накола батареи. Фоторезистор основного канала охлаждается до температуры –196°C за 4,5 с, после чего необходимая температура поддерживается в течение 14 с. 125 Этим обеспечивается высокая чувствительность фотоприёмника к тепловому излучению поражаемых целей на фоне помех. Батарея НБП приводится в действие и выдает напряжение постоянного тока + 5 В и ± 20 В в элементы трубы, электронный блок ПМ и ОГСН. Разгон ротора гироскопа. Блоком разгона и синхронизации (БРС) ПМ совместно с блоком датчиков трубы и катушками разгона ТГСН производится разгон ротора гироскопа. При достижении требуемой скорости вращения ротора частотное реле БРС отключает питание с БРС, а дальнейшее поддержание требуемой скорости вращения ротора обеспечивается системой стабилизации оборотов ОГСН. Во время разгона ротора трактом арретира ПМ совместно с усилителем коррекции и катушкой пеленга ОГСН производится арретирование оси ротора с совмещением его оптической оси с продольной осью трубы. После раскрутки гироскопа автомат разарретирования и пуска (АРП) пускового механизма отключает блок разгона и синхронизации пускового механизма и включает в работу систему стабилизации оборотов (ССО). Одновременно включается система арретирования ротора гироскопа. С катушки ГОН снимается сигнал, характеризующий фактическую частоту вращения ротора гироскопа и подается на ССО. Система стабилизации оборотов, сравнивая сигнал с катушки ГОН с заданной частотой, формирует в катушках вращения импульсы тока, вызывающие уменьшение или увеличение скорости вращения ротора. Этим обеспечивается поддержание частоты сканирования цели в узкой полосе пропускания усилительно-преобразовательного тракта сигнала ошибки наведения ракеты. Арретирование гироскопа. После окончания разгона ротора его оптическая ось смещается на 5° ниже оси трубы. Для этого трактом арретирования ПМ используется сигнал с обмотки заклона (ЗАКЛОН 5°) блока датчиков трубы. При переводе пускового крючка ПМ в положение РР или РП оптическая ось ТГСН совмещается с линией прицеливания (10° ниже оси трубы), для чего трактом арретирования ПМ используется сигнал ЗАКЛОН 10° с обмотки заклона. На систему арретирования ротора гироскопа подается сигнал с катушки пеленга, характеризующий отклонение оптической оси координатора от продольной оси ракеты. Одновременно на систему арретирования подается сигнал с катушки заклона, задающий отклонение линии прицеливания от продольной оси ракеты (заклон). Причем, если пусковой крючок находится в положении АРР, то заклон составляет 5° (для запоминания уровня фона в районе цели). Если же пусковой крючок находится в положении РР или РП, то заклон составляет 10° (линия прицеливания). Данный сигнал подается на катушку коррекции и отрабатывается следящим приводом координатора. Этим обеспечивается принудительное совмещение оптической оси координатора с линией арретирования. Формирование сигнала ошибки. При прицеливании стрелок должен обеспечить удержание цели в узком поле зрения объектива (2°). При этом тепловое излучение поражаемых целей и ЛТЦ селектируется зеркально-линзовым объективом и фокусируется в виде пятен малого размера в фокальных плоскостях ос126 новного и вспомогательного спектральных каналов. Этим обеспечивается перенос информации о пространственном положении цели и ЛТЦ относительно оптической оси координатора (ошибки слежения) в фокальные плоскости объектива. Фотосопротивления основного и вспомогательного каналов преобразуют модулированные тепловые потоки цели и ЛТЦ в синхронные импульсные электрические сигналы постоянного тока. Причём, в длительности импульса содержится информация о величине, а во временном положении импульса в периоде сканирования (фазе) ‒ о направлении ошибки слежения за целью. За начало отсчёта периода сканирования условно принято направления вверх. Предварительные усилители фотоприёмника преобразуют сигналы постоянного тока в цепи фотосопротивлений в периодические сигналы переменного тока требуемого уровня, содержащие в себе первые гармоники частоты сканирования. Причём амплитуда сигналов частоты сканирования несёт информацию о величине, а фаза — о направлении ошибки слежения за целью и ЛТЦ. Защита от ЛТЦ. Использование в ПЗРК «Игла» двухканального фотоприёмника обеспечивает в условиях отстрела противником ЛТЦ (с интервалом до 0,3 с и превышением мощности излучения до 6 раз) спектральное разделение сигналов от цели и ЛТЦ. Поскольку спектры сигналов цели и ЛТЦ имеют конечную ширину и могут пересекаться, то для надежного разделения данных сигналов используется логическая и временная селекция. Данная селекция осуществляется схемой переключения, расположенной в электронном блоке КЦ. Селекция может быть отключена нажатием кнопки «Селектор» на пусковом механизме. Анализ сигналов. Сигнал цели с выхода электронного блока КЦ поступает в обнаружитель цели АРП пускового механизма. При установке пускового крючка в положении «РР» или «РП» АРП анализирует превышение сигнала цели над сигналом фона. Если это превышение составляет 4 и более, то АРП разрешает разарретирование (отключает от усилителя коррекции сигнал ошибки арретирования и подключает сигнал ошибки слежения за целью). При этом сигнал ошибки слежения усиливается по мощности в усилителе коррекции и запитывает катушки коррекции. Катушки коррекции, взаимодействуя с полем постоянного магнита ротора гироскопа, создают электромагнитный момент, заставляющий прецессировать координатор в сторону уменьшения ошибки слежения. Таким образом, следящий координатор захватывает и начинает автоматически сопровождать цель, определяя угловую скорость линии визирования (ошибку наведения ракеты). Далее, в течение 0,8 с, АРП поэтапно оценивает параметры сигнала цели и, при положительном результате анализа, включает световую и звуковую сигнализацию, разрешающую пуск. Прерывистая сигнализация свидетельствует о недостаточном качестве сигнала цели и периодическом арретировании координатора для перезахвата цели. 127 Пуск ракеты осуществляется в автоматическом или ручном режиме работы ПМ. В автоматическом режиме работы ПМ после накола наземного блока питания, прицеливания и нажатия на пусковой крючок до упора ротор гироскопа разарретируется. При нахождении цели в поле зрения ОГСН сигнал от цели с ОГСН поступает в АРП для анализа качества захвата. При положительном результате анализа сигнала захвата автоматически производится опознавание цели НРЗ. Пуск в режиме «Автомат» возможен, если в течение 0,8 с после нажатия на пусковой крючок будут выполнены условия, контролируемые блоком логики ПМ: сигнал от цели превышает сигнал от фона (обнаружитель цели); СКЦ ТГСН надежно удерживает в поле зрения цель, имеющую угловую скорость не менее 4 град/с (блок логики и обнаружитель цели); угол между оптической осью гироскопа и линией прицеливания трубы должен быть не более 2°; угловая скорость линии визирования не превышает 12 град/с (блок сигналов коррекции); цель не отвечает на запрос НРЗ. При выполнении этих условий АРП блокируется и выдает сигнал на блок реле, которое подает сигнал на электровоспламенитель ПАД и блок взведения рулевого отсека. Через 0,72 с (время выхода на режим бортовых источников энергии) напряжение подается на электровоспламенитель стартового двигателя, который срабатывает и выбрасывает ракету из трубы со скоростью 28 м/с, придавая ей вращение вдоль продольной оси до 20 об/с. Через 0,72 с (время задержки для выхода на режим БИП) напряжение поступает на ЭВ стартового двигателя. В ручном режиме пуска после накола наземного блока питания, прицеливания и нажатия на пусковой крючок до среднего положения анализ качества захвата и опознавание цели производится так же, как и в автоматическом режиме работы ПМ. Информация о положительном результате анализа и опознавания выдается АРП в виде световой и звуковой информации. При нажатии пускового крючка до упора АРП блокируется и напряжение поступает на блок реле, после чего происходит процесс, аналогичный автоматическому режиму пуска. В случае потери цели ОГС ротор гироскопа автоматически арретируется в обоих режимах пуска и световая информация отключается. Если на запрос НРЗ цель отвечает правильным кодом «свой», то в обоих режимах работы АРП выдает запрет на пуск, звуковой сигнал начинает периодически прерываться, а лампочка световой информации мигает с частотой 12-13 Гц. Этот режим продолжается до возвращения пускового крючка в исходное положение или до истечения ресурса работы батареи наземного блока питания. 128 При стрельбе вдогон перед пуском нажимается кнопка «Вдогон», в результате чего происходит уменьшение коэффициента передачи контура управления и, соответственно уменьшается крутизна траектории полета ЗУР. В случае потери цели ротор гироскопа ТГСН автоматически арретируется в обоих режимах пуска. Если по запросу НРЗ цель отвечает правильным кодом «свой», то в обоих режимах пуска блок логики АРП выдает запрет на пуск. Об этом свидетельствуют прерывания сигналов звуковой и световой информации с частотой 12,5 Гц, которые продолжаются до возвращения пускового крючка в исходное положение. Если сигнал от цели меньше сигнала от фона, ротор гироскопа периодически (с частотой 2,5 Гц) арретируется, о чем свидетельствует прерывание с этой же частотой световой и звуковой информации. Работа элементов ЗУР в полете Команда «Пуск». При наличии постоянной световой и звуковой сигнализации и переводе пускового крючка в положение «РП» (разрешение пуска) АРП сформирует электрическую команду «ПУСК», которая через блок реле пускового механизма поступает: а) на электровоспламенитель порохового аккумулятора давления (ПАД), вызывая последовательное воспламенение навески пороха, пиротехнической петарды и порохового заряда. Образующиеся пороховые газы очищаются фильтром и подаются на рулевую машину и турбину бортового источника питания (БИП). Вырабатываемое БИП напряжение питания «дежурит» на контактах размыкателя блока взведения; б) зарядку конденсаторов блока взведения, исключающих перерыв в питании при переходе питания с НИП на БИП; в) через 0,72 с (время выхода БИП на режим) на электровоспламенитель стартового двигателя, который воспламеняет навеску пороха. Старт ракеты. При поступлении напряжения на ЭВ стартового двигателя, последний срабатывает, в результате чего ракета начинает движение. При движении ракеты по пусковой трубе происходит срезание трубки, подводящей сжатый газ от баллона в охлаждающее устройство ОГСН, расстыковка ракеты с вилкой бортразъема пусковой трубы, утапливание стопора механического крепления ракеты в пусковой трубе и обрыв проводов запальных цепей стартового двигателя. Стартовый двигатель заканчивает работу в пусковой трубе и улавливается в ней с помощью разжимного останавливающего кольца, которое при движении ракеты по пусковой трубе западает в кольцевую проточку в передней части пусковой трубы. 129 Стартовый двигатель придает ракете необходимые скорость вылета из пусковой трубы (около 30 м/с) и частоту вращения относительно продольной оси (около 20 об/с). Ускорение ракеты достигает 120 g. При вылете ракеты из пусковой трубы происходит раскрытие рулей, крыльев и пластин дестабилизатора и их фиксация в раскрытом положении. Форсом пламени стартового двигателя поджигается лучевой воспламенитель замедленного действия, установленный в сопловом блоке маршевого двигателя. Срабатывание маршевого двигателя. При загорании навески пороха воспламеняется основной заряд стартового двигателя и лучевой воспламенитель маршевого двигателя. Лучевой воспламенитель обеспечит воспламенение заряда маршевого двигателя примерно через 0,4 с после вылета из трубы и безопасность стрелка (ракета удалится на 5,5 м). Маршевый однокамерный двухрежимный двигатель обеспечивает разгон ракеты до крейсерской скорости (до 570 м/с) и поддержание её в полете. С началом движения ракеты по трубе механизм бортразъёма обеспечит отстыковку вилки бортразъёма, а с выходом ракеты из трубы раскрываются рули (а также крылья и дестабилизаторы). При этом замыкаются контакты размыкателя блока взведения, обеспечивая подачу напряжения с БИП: а) на электровоспламенитель предохранительно-детонирующего устройства (ПДУ), от которого загораются пиропредохранитель ПДУ и пирозапресовка механизма самоликвидации. Под действием осевого ускорения блокирующий стопор проседает (снятие I ступени предохранения), а через 1–1,9 с прогорает пиропредохранитель, разрешающий поворотной втулке с капсюлем-детонатором установиться в боевое положение (снятие II ступени); б) через контакты поворотной втулки на зарядку конденсаторов С1, С2 боевой цепи — взрыватель готов к срабатыванию; в) на электровоспламенитель порохового управляющего двигателя, от которого загораются навеска пороха, петарда и пороховой заряд. Пороховые газы через газораспределительную втулку рулевой машины поступают в сопла, обеспечивая на начальном участке полёта дополнительное газодинамическое управление по командам автопилота. УВК формирует напряжение команды управления полётом (рис. 2): а) сигнал ошибки наведения ракеты, пропорциональный угловой скорости линии визирования, с выхода усилителя коррекции КЦ через синхронный фильтр и динамический ограничитель поступает на первый вход сумматора Σ. Информация о величине и плоскости ошибки наведения содержится, соответственно, в амплитуде и фазе сигнала с частотой сканирования цели; б) на второй вход сумматора Σ поступает сигнал со схемы управления полетом на начальном участке, обеспечивающий ускоренный вывод ракеты на кинематическую траекторию; 130 в) формирователь команд управления рулями, используя в качестве опорного сигнал ГОН, переносит информацию об ошибке наведения с частоты сканирования f2 (100 Гц) на частоту управления рулями f3 (20 Гц). При этом синусоидальный сигнал частоты f3 несёт в себе информацию о том, в какую сторону (фаза сигнала) и насколько (амплитуда сигнала) в любой момент периода управления нужно отклонить вращающиеся рули, чтобы создаваемая ими управляющая сила непрерывно уменьшала ошибку наведения; г) схема линеаризации обеспечивает сохранение линейной зависимости величины управляющей силы от величины ошибки наведения при релейном режиме работы рулей. Благодаря ей формируется суммарный управляющий сигнал, задающий переброс рулей из одного крайнего положения в другое (±15°) четыре раза за период управления и на разное время. uсо со схемы ближней зоны uη с катушки пеленга uсо с усилителя коррекции uη с катушки пеленга Схема смещения Синхронный фильтр Динамический ограничитель Σ Формирователь команд управления рулями на автопилот Схема управления полетом на начальном участке φзад время задержки (τ) Рис. 2. Структурная схема УВК Для повышения эффективности наведения в ОГСН предусмотрены схема ближней зоны и схема смещения, обеспечивающие на конечном участке полёта слежение за энергетическим максимумом излучения цели (соплом) и смещение траектории от сопла в корпус. Автопилот формирует управляющую силу, действующую на ракету, на основании сигнала УВК (с помощью одноканального релейного рулевого привода) и демпфирования колебаний ракеты относительно продольной оси (рис. 3): а) с помощью усилителя-ограничителя и усилителя мощности суммарный управляющий сигнал преобразуется в импульсное двухполярное напряжение управления электромагнитами рулевой машины; 131 б) для гашения поперечных колебаний корпуса ракеты используется сигнал отрицательной динамической обратной связи с датчика угловых скоростей, подаваемый на усилитель-ограничитель. Под действием напряжений управления полётом, формируемых усилителем-ограничителем автопилота, поочерёдно срабатывают электромагниты золотника рулевой машины, обеспечивая подачу газов ПАД в полости рабочего цилиндра и соответствующее перемещение рулей. Сигнал команды из УВК Усилительограничитель Усилитель мощности ДУС с усилителем Рулевая машинка ракета Рис. 3. Структурная схема автопилота Рули создают аэродинамическую управляющую силу, удерживающую ракету на кинематической траектории полёта в учрежденную точку встречи с целью. При попадании ракеты в цель: а) в момент прохождения взрывателя через металлическую преграду или вдоль неё основной датчик цели ГМД1 выдает импульс тока, от которого последовательно сработают ЭВ3, капсюль-детонатор, детонатор взрывателя, детонатор и разрывной заряд боевой части, а через трубку и взрывной генератор и остатки топлива МД; б) под действием волн упругих деформаций срабатывает дублирующий датчик ГМД2, электрический импульс которого вызывает срабатывание с задержкой инициирующего заряда и далее подрыв БЧ (если подрыв еще не произошел). При промахе механизм самоликвидации уничтожит ракету. 132