новый первый закон классической динамики
advertisement

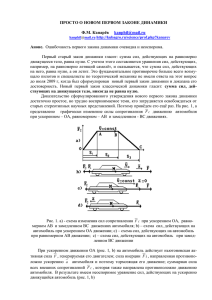
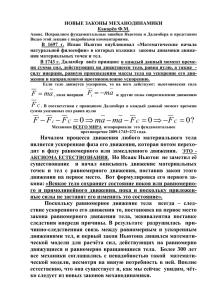
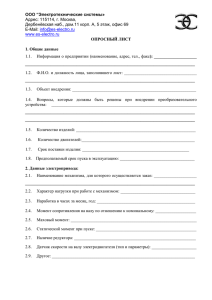
НОВЫЙ ПЕРВЫЙ ЗАКОН КЛАССИЧЕСКОЙ ДИНАМИКИ Ф.М. Канарёв kanphil@mail.ru http://kubagro.ru/science/prof.php?kanarev Анонс. Классическая теоретическая механика на пути модернизации. Классическая динамика изучает движение и взаимодействие материальных тел. Её основы были заложены Ньютоном в 1687 г. в его «Математических началах натуральной философии». Первый закон динамики описывает прямолинейное и равномерное ( V const ) движение тела. Из нового первого закона динамики следует, что начальное движение любого тела ускоряется активной внешней силой F , которая всегда направлена в сторону движения. Она больше сил сопротивления F C при ускоренном движении тела и равна им F F C , когда тело движется равномерно. При ускоренном движении тела всегда появляется сила инерции F i , направленная противоположно движению. Она автоматически изменяет своё направление на противоположное при переходе тела к равномерному движению. Из этого следует, что на движущееся тело всегда действует сила. Однако, старый первый закон динамики утверждает, что, при равномерном прямолинейном движении тела, в том числе и астероида в космосе (рис. 1, а), сумма сил, действующих на него, равна нулю. Проверим правильность этого закона. Рис. 1. Схема сил, действующих на: b) автомобиль: c) при ускоренном движении (ОА); d) при равномерном движении (АB); е) при выключенной передаче (ВС); f) при ускоренном движении (СD); j) равномерно движущийся астероид; М – центр масс автомобиля 2 Чтобы понять суть противоречий, заложенных в старом первом законе динамики, проследим за изменением сил, действующих на автомобиль при его ускоренном ОА (рис. 1, b, c) и равномерном АВ (рис. 1, b, d) движениях, а также при замедленном движении ВС (рис. 1, b, е) с выключенной передачей и - повторном ускоренном движении СD (рис. 1, b, f). Как только появляется внешнее активное воздействие F (рис. 1, b, точка О), то автомобиль начинает двигаться с ускорением а (рис. 1, с) и кинематическое уравнение его движения, описывающее изменение скорости V , записывается так V a t . (1) Исаак Ньютон постулировал, что направление силы F внешнего воздействия на тело массой m совпадает с направлением его ускорения а и рассчитывается по формуле (рис. 1, с) F ma . (2) Это - математическая модель второго закона Ньютона. Даламбер дополнил этот закон в 1743 г., указав, что в каждый данный момент времени на ускоренно движущееся тело действует сила инерции F i , величина которой равна ma и направлена противоположно ускорению a (рис. 1, с) F i ma . (3) В результате оказывается, что на тело, движущееся с ускорением, действуют одновременно две равные по величине и противоположные по направлению силы F и F i . F F i . (4) Если нет сил сопротивления F C , то сумма сил, действующих на тело, оказывается равной нулю. F Fi 0 , (5) Это явно противоречит второму закону динамики, описывающему ускоренное движение ракеты или спутника в космосе, где нет сопротивлений. Поэтому надо найти причину этого противоречия. Она скрыта в процессе перехода ускоренного движения тела к равномерному (рис. 1, b, c, d) Так как сила инерции F i направлена противоположно ускоренному движению автомобиля (рис. 1, b, ОА, c) , то сумма сил, действующих на него, запишется так F Fi FC (6) или m a m ai F c . (7) Как видно (7) полное ускорение автомобиля a не равно его инерциальному ускорению a i . И это естественно, так как в противном случае сила F C сопротивления движению автомобиля была бы равна нулю. Сила инерции, действующая на автомобиль при его ускоренном движении, равна (8) F i m ai F F c . 3 Ускорение a i , соответствующее силе инерции F i , не равно ускорению a движения автомобиля под действием внешней силы F , так как оно ( а i ) соответствует ускоренному движению тела при полном отсутствии внешнего сопротивления ( F C 0 ). Из этого следует, что истинную величину силы инерции F i можно измерить, в условиях полного отсутствия внешнего сопротивления или путём вычитания всех сил сопротивления F C от внешней силы F (8). В результате становится ясной сила, действующая на астероид при его прямолинейном равномерном движении (рис. 1, а). Это - сила инерции F i , подобная той, что действует на равномерно движущийся автомобиль (рис. 1, d). Возникает вопрос: каким образом астероид А (рис. 1, j) приобрёл силу инерции F i , которая движет его прямолинейно и равномерно? В истории жизни астероида был момент, когда на него действовала внешняя сила F и ускоряла его движение. В результате появилась сила инерции F i , направленная противоположно движению астероида. Потом внешняя сила F исчезла по каким-то причинам, а сила инерции F i , изменив своё направление на противоположное, начала осуществлять прямолинейное и равномерное движение астероида (рис. 1, j). Поскольку астероид движется под действием силы инерции без ускорения, то её можно назвать пассивной силой. На рис. 1, b S1 - расстояние, пройденное автомобилем при ускоренном движении. При переходе к равномерному движению (рис. 1, b, АВ) сила инерции F i , препятствовавшая ускоренному движению автомобиля, автоматически меняет своё направление на противоположное и превращается в силу, способствующую его движению (рис. 1, d). Поэтому уравнение (6) становится таким F Fi FC . (9) Суть этого уравнения заключается в том, что равномерное движение автомобиля обеспечивает сила инерции F i , а сила F , генерируемая двигателем автомобиля, преодолевает все внешние сопротивления F C . Это уравнение (9) описывает равномерное движение автомобиля на участке AB (рис. 1, b, d). Если выключить передачу, то сила F исчезнет, а сила инерции F i окажется недостаточной, чтобы преодолевать внешние сопротивления F C и скорость автомобиля начнёт уменьшаться. Если в момент, когда скорость автомобиля уменьшится до 50 км/час (рис. 1, b, C), включить передачу и начать увеличивать скорость до 100 км/час, то вновь появится сила инерции F i m a i , направленная противоположно движению автомобиля, и его движение (рис. 1, f) вновь будет описываться уравнением (6). Когда автомобиль достигнет скорости 100 км/час и водитель примет решение двигаться дальше равномерно, то сила инерции F i автоматически изменит направление на противоположное и движение автомобиля будет описываться уравнением (9). Как видно (9), при равномерном движении автомобиля сумма сил, действующих на него, не равна нулю. Из этого следует новый первый закон классической динамики: сумма сил, действующих на движущееся тело, никогда не равна нулю. Возникает естественный вопрос: какая сила способствует экономии топлива при движении автомобиля? Ответ очевиден - сила инерции F i . Вполне естественно, что на участке ВC (рис. 1, b) автомобиль движется, не расходуя топливо. Сразу возникает и другой вопрос: нельзя ли использовать силу инерции, возникающую при вращении тела, для экономии электрической энергии, потребляемой электродвигателем? Если учесть, что при вращении тела на него действует центробежная сила инерции, которая не изменяет свое направление при прекращении действия внешнего активного момента сил, то её можно использовать не только для экономии электрической энер- 4 гии, питающей электродвигатель, но и для генерирования в его приводе дополнительной мощности. Это теоретическое следствие реализовано российским инженером Линевич Эдвид Ивановичем. Он доказал экспериментально, что наличие в механической передаче электродвигателя дисбалансов приводит к увеличению механической мощности на его валу, которая многократно превышает электрическую мощность на привод электродвигателя (рис. 2) [1]. Если амплитуды импульсов механических моментов, генерируемых дисбалансами, больше величины сопротивления вращению вала, формируемого потребителем, то они будут преодолевать сопротивление потребителя и таким образом импульсно освобождать вал электродвигателя от нагрузки. В результате, как установлено экспериментально, уменьшается расход электрической энергии на работу электродвигателя в 10 и более раз [1]. Рис. 2. Центробежный накопитель энергии и мощности: 1 – электродвигатель; 2 и 3 – дисбалансы; 4 – шестерни; 5 – зубчатое колесо; 6 – неподвижная ось; 7 – обгонная муфта; 8 – подшипник Кинематическое уравнение изменения угловой скорости электродвигателя при его ускоренном вращении в момент запуска запишется так t , (10) где - угловое ускорение. Динамическое уравнение изменения момента M Z сил, действующих на вал электродвигателя при его ускоренном вращении, будет аналогично уравнению (6) сил, действующих на ускоренно движущееся тело, и запишется так M Z Mi M , с где (11) М i I z - момент моментов инерции I Z или инерциальный момент всех ускоренно вращающихся частей; М С - сумма моментов сил сопротивления вращению. При переходе электродвигателя в режим равномерного вращения уравнение (11) становится аналогичным уравнению (9) M Z Mi M . с (12) Здесь M Z - крутящий момент, генерируемый электродвигателем, за счёт электрической энергии; M i - инерциальный момент всех вращающихся частей, сформировавшийся 5 в процессе ускоренного вращения электродвигателя; M 1 - сумма моментов всех сил сопротивления. Если в системе привода нет дисбалансов, то при равномерном вращении вала электродвигателя сумма моментов M Z + M i постоянна (рис. 3). Рис. 3. Схема постоянной суммы моментов M z M i , действующих на вал электродвигателя и синусоидальная закономерность изменения инерциального момента M ii Присутствие в левой части уравнения (12) момента M Z , генерируемого электродвигателем, и инерциального момента M i , формируемого всеми вращающимися частями, указывает на то, что оба они участвуют в преодолении суммы моментов М С всех сил сопротивлений. Это значит, что имеется возможность увеличить долю M i в левой части уравнения (12) и уменьшить долю M Z в преодолении моментов сил сопротивлений М С . Добиться этого можно путём генерирования таких импульсов инерциальных моментов M ii , амплитуда которых будет больше суммы M Z M i (рис. 3). Вполне естественно, что положительная амплитуда M ii будет ускорять вал электродвигателя и импульсно освобождать его от нагрузки, идущей от потребителя. Отрицательная амплитуда M ii будет тормозить вал электродвигателя и общий эффект моментов M ii и M ii будет равен нулю. Чтобы этого не происходило, надо в систему привода поставить обгонную муфту 7 (рис. 2), которая обрезала бы отрицательные значения момента M ii . Тогда положительная часть инерциального момента M ii будет подавать импульсы моментов на вал электродвигателя и если эти импульсы будут больше суммы моментов M z M i (рис. 3), то они будут передаваться потребителю через обгонную муфту и таким образом разгружать вал электродвигателя. В результате на его валу будет оставаться в основном нагрузка холостого хода, что приведёт к резкому уменьшению расхода электроэнергии. Чтобы понять причину этого необходимо получит уравнение, описывающее закон изменения импульсов моментов центробежных сил дисбалансов. Для этого возьмём за основу схему автора представленную на рис. 2. Поскольку вращающиеся шестерни 2 и 3 сбалансированы, то они не генерируют явление дисбаланса. На рис. 4 показана схема для вывода уравнения импульса момента сил инерции, генерируемого дисбалансами D1 и D2 . Обратим внимание на то, что центральная шестерня 1 на валу электродвигателя и две шестерни 2 и 3 с дисбалансами D1 и D2 представляют единую механическую систему, поэтому проекции Fx и F y центробежных сил инерции F обоих дисбалансов формируют пары с моментами (рис. 4): 6 Рис. 4. Схема для анализа действия силы инерции F на дисбалансы D1 и D2 M 1 F sin 2 t L m 22 (r r0 ) 2 (2R 2r 2r cos 2 t 2r0 cos 2 t ) sin 2 t; . (13) M 2 F cos 2 t (r r0 ) sin 2 t m 22 (r r0 ) 2 sin 2 t cos 2 t. . (14) Обратим внимание и на то (рис. 4), что в начальный момент М 1 способствует вращению вала 1 электродвигателя, поэтому он взят со знаком плюс, а - М 2 препятствует вращению, поэтому взят со знаком минус. Закономерность изменения моментов этих пар и будет формировать дополнительное воздействие на вал 1 электродвигателя. Анализ показывает, что теоретическая закономерность (15) изменения суммы моментов M 1 M 2 , как скалярных величин, близка к экспериментальной закономерности (рис. 5, сплошная искажённая синусоида). M М 1 М 2 m 22 (r r0 ) 2 sin 2 (2 R 2r 2r cos 2 t 2r0 cos 2 t ) m 22 (r r0 ) 2 sin 2 t cos 2 t . (15) Рис. 5. Экспериментальный (А) и теоретический (В) максимумы суммы импульсов составляющих М 1 и М 2 моментов центробежных сил инерции дисбалансов Обратим внимание на то (рис. 5), что положительная амплитуда импульсов моментов центробежных сил инерции дисбалансов и угол поворота t1 вала электродвигателя, формирующий положительную амплитуду, больше отрицательной амплитуды и больше угла t 2 , формирующего отрицательную амплитуду импульса. Далее, так как положительный импульс мощности значительно превосходит среднюю мощность электродвигателя, то он передаётся валу электродвигателя и таким обра- 7 зом освобождает его от нагрузки. При этом обгонная муфта обрезает нижнюю, отрицательную часть амплитуды импульса (рис. 5) и освобождает вал от тормозящего действия этой части импульса. Анализ показывает, что с увеличением частоты вращения вала роль обгонной муфты начинают выполнять зазоры в системе привода и деформации его элементов и надобность в обгонной муфте отпадает. Автор изобретения подтвердил достоверность этого теоретического следствия экспериментально [1]. Таким образом, на рабочий механический момент на валу 1 электродвигателя (рис. 4) будут накладываться импульсы момента M центробежных сил инерции, формируемого двумя дисбалансами D1 и D2 . Если величины моментов M этих импульсов будут больше рабочего момента сил сопротивления M С , то они будут передаваться валу потребителя и освобождать электродвигатель от внешней нагрузки, переводя его в режим холостого вращения. ЗАКЛЮЧЕНИЕ Установлен закон трансформации силы инерции, препятствующей ускоренному движению тела, в силу инерции, движущую тело при переходе его к равномерному движению. Этот закон управляет равномерным и прямолинейным движением фотонов, и мы на пути детального описания динамики этого движения [2]. Литература 1. Линевич Э.И. Применение центробежной силы в качестве источника мощности. http://www.dlinevitch.narod.ru/pages.htm 2. Канарёв Ф.М. Начала физхимии микромира. 12-е издание. Том I. Краснодар 2009. 687 с. http://kubagro.ru/science/prof.php?kanarev