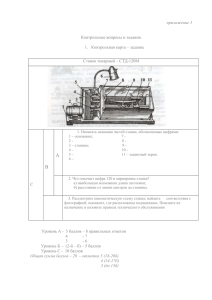
устройства, координирующие положение режущего
advertisement

Министерство образования Российской Федерации Саратовский государственный технический университет ПРОЕКТИРОВАНИЕ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ Учебное пособие для студентов специальности 151001.65 «Технология машиностроения» Одобрено редакционно-издательским советом Саратовского государственного технического университета Саратов 2009 ПОНЯТИЕ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ. Вспомогательные устройства, используемые при механической обработке, сборке, контроле изделий называют приспособлениями. Приспособления, рабочие и контрольные инструменты вместе взятые называют технологической оснасткой, причем приспособления являются наиболее сложной и трудоемкой ее частью. В крупносерийном и массовом производстве на каждую обрабатываемую деталь в среднем приходится 10 приспособлений. Значительную их долю (80 – 90 % общего парка) составляют станочные приспособления, применяемые для установки и закрепления обрабатываемых заготовок. Использование технологической оснастки способствует: - повышению производительности; - точности обработки, сборки и контроля; - облегчению условий труда; - сокращению количества и снижению квалификации рабочих; - строгой регламентации длительности выполняемых операций; - расширению технологических возможностей оборудования; - повышению безопасности рабочих и снижению аварийности и т.п. КЛАССИФИКАЦИЯ ПРИСПОСОБЛЕНИЙ. По целевому назначению приспособления можно разделить на пять основных групп: 1. Станочные приспособления для установки и закрепления обрабатываемых заготовок. Они подразделяются на сверлильные, фрезерные, расточные, токарные и др. К этой группе относят также приспособления специального назначения (для гибки, рихтовки и др. операций). Эта группа приспособлений связывает заготовку со станком. 2. Станочные приспособления для установки и закрепления инструмента. К ним относятся патроны для сверл, разверток, метчиков, многошпиндельные сверлильные и фрезерные головки, инструментальные державки для токарно-револьверных станков и автоматов и др. устройства. Данная группа приспособлений называется также вспомогательным инструментом и характеризуется большим числом нормализованных конструкций. Эта группа выполняет роль связующего звена между инструментом и станком. ри помощи первой и второй групп осуществляется наладка технологической системы станок – заготовка – инструмент. 3. Сборочные, используемые для соединения деталей в изделия. Применяют следующие типы сборочных приспособлений: для крепления базовых деталей собираемого узла, для обеспечения 3 правильной установки соединяемых элементов изделия, для предварительного деформирования устанавливаемых упругих элементов (пружин, разрезных колец). а также для запрессовки, клепки, развальцовывания и других операций, когда требуются при сборке большие усилия. 4. Контрольные, применяемые для проверки заготовок при промежуточном и окончательном контроле деталей, а также при сборке машин. 5. Приспособления для захвата, перемещения и кантования тяжелых, а в автоматизированном производстве и легких заготовок, деталей и собираемых изделий (роботы, манипуляторы). КЛАССИФИКАЦИЯ СТАНОЧНЫХ ПРИСПОСОБЛЕНИЙ. 1. По технологическому признаку: токарные, фрезерные, сверлильные, шлифовальные и т.д. 2. По степени специализации 2.1. Универсальные приспособления (УП) – применяются в единичном и мелкосерийном производстве. 2.2. Переналаживаемые приспособления. – применяются в мелкосерийном и среднесерийном производстве. состоят из постоянной (базовой) части и комплекта сменных наладок В ЕСТПП все переналаживаемые приспособления приведены к 7 видам: Универсально-сборные; Сборно-разборные; Универсально-безналадочные; Универсально-наладочные; Специализированные наладочные приспособления; Неразборные спец. приспособления Агрегатные средства механизации зажима. 2.3. Специальные приспособления (СП), предназначенные для выполнения определенных технологических операций и представляют собой непереналаживаемые приспособления одноцелевого назначения. Их используют в массовом производстве при постоянном закреплении операций на рабочих местах. СП трудоемки и дороги в изготовлении. 3. По степени механизации и автоматизации приспособления делятся на ручные, механизированные, полуавтоматические и автоматические. 4 КЛАССИФИКАЦИЯ ЭЛЕМЕНТОВ ПРИСПОСОБЛЕНИЙ. Все детали в приспособлениях делятся на группы, выполняющие одни и те же функции. Проведенная стандартизация в области оснастки уменьшила разнообразие этих деталей и объединила их в следующие группы: 1. Установочные элементы; 2. Зажимные; 3. Установочно-зажимные; 4. Силовые приводы; 5. Устройства, координирующие положения режущего инструмента; 6. Делительные устройства; 7. Корпуса приспособлений; 8. Вспомогательные элементы. ОБОСНОВАНИЕ ВЫБОРА СИСТЕМЫ ТЕХНОЛОГИЧЕСКОГО ОСНАЩЕНИЯ Одним из важных этапов работы конструктора станочных приспособлений является технико-экономические обоснования выбираемой им системы технологического оснащения и определение эффективности конкретной конструкции приспособления. Методическая основа подхода к выбору средств технологического оснащения утверждена ГОСТами ЕСТПП, в частности ГОСТ 14.301-73 «Общие правила разработки технологически процессов и выбора средств технологического оснащения» и ГОСТ 14.305-73 «Правила выбора технологической оснастки». При определении эффективности одного отдельно взятого приспособления оценка производится по фактическим годовым затратам на оснащение без учета величины отдачи капитальных вложений (т.к. эта величина для одного приспособления незначительна). Выбор наиболее экономичной системы приспособлений производится на основании результатов технико-экономических расчетов. Экономический эффект ( Эс ) от использования приспособлений определяется как разница между достигаемой в результате применения оснастки экономии по зарплате (Эг) и косвенным расходам на приспособление, отнесенным к одной детале-операции (Р): Эс Эг Р При сравнении двух вариантов конструкции приспособлений выгоднее будет то, которое обеспечивает больший эффект. Для расчета годовых затрат на неразборные спец. приспособления (НСП), универсально-безналадочные приспособления (УБП) и сборноразборные приспособления (СРП) пользуются формулами: 5 P S K a K э , где S – себестоимость изготовления (с учетом затрат на проектирование) или цена приспособления; Ка – коэффициент амортизации приспособления, связанный со сроком эксплуатации приспособления (Тп) соотношением: Ка 1 ; Тп Кэ – коэффициент затрат на эксплуатацию приспособления. Для универсально-сборных приспособлений (УСП) годовые затраты на создание и эксплуатацию одной компоновки (при условии многократной сборки ее в течение года): S Р c Sv g , Mk где Мк – число оригинальных (неповторяющихся) компоновок УСП, собираемых в течение года (с учетом одновременно необходимых дублеров); g – повторяемость (кратность) сборки одной и той же компоновки в течение года; Sc – постоянные затраты на комплекс УСП (в т.ч. амортизация комплекта УСП, фонд зарплаты конструкторской группы УСП, годовые затраты на спец. детали и вспомогательные материалы, а также погашение затрат на убыль компонентов УСП); Sv – переменные затраты, которые учитывают расходы по зарплате и косвенные расходы на сборку и наладку одной компоновки УСП. Годовые затраты на универсально-наладочное приспособление: S муп K aуу К эуп S мн 1 К пн K aн К эн , Р унп m где Sмуп – себестоимость (цена) универсальной, базовой части УНП; Sмн – себестоимость изготовления в металле сменной наладки; Кпн – коэффициент затрат на проектирование сменной наладки; Кауп, Кан – коэффициенты амортизации универсальной части приспособления и наладки соответственно; Кэуп, Кэн – коэффициенты эксплуатационных расходов на универсальную часть и наладку. m – число сменных наладок. Годовая экономия по заработной плате и косвенным расходам в расчете на одну деталь определяется как: э l t k S мч , 60 где l – экономия на зарплате основных рабочих, учитывающая разницу в трудоемкости изготовления детали до внедрения 6 приспособления (tk1) и после оснащения станка (tk2), а также изменение тарифной ставки рабочего на данной операции (l1 и l2): l t k1 l1 t k 2 l2 ; tk – снижение трудоемкости операции; Sмч – расходы на машино-час работы оснащенного приспособлением оборудования. Общая годовая экономия для всей годовой программы: Эг э N г Графически величина экономии, полученной при использовании приспособлений в зависимости от объема выпуска деталей может быть представлена в виде следующего графика рис. 1-а. Для сравнения альтернативных вариантов использования технологической оснастки могут применяться графики аналогичные приведенным на рис. 1-б. Рис.1 Формирование экономии, получаемой при использовании приспособлений. 1 – экономия по зарплате и косвенным расходам, 2 – расходы на приспособления в расчете на одну деталь. В курсовом и дипломном проектировании приспособлений, а также в рабочих проектах для ориентировочной оценки целесообразности использования той или иной системы приспособлений можно использовать в качестве критерия коэффициент загрузки приспособления: Кз N г t шк 60 Фдо , где Nг – годовая программа выпуска деталей одного наименования; tшк – штучно-калькуляционное время операции, мин. Фдо – действительный фонд времени приспособления в год, час. В соответствии с рекомендациями ГОСТ 14.305-73 рентабельность различных систем технологического оснащения определяется в зависимости от коэффициента загрузки приспособления и периода производства изделий по следующей графической зависимости. 7 8 Рис. 2 Границы рентабельности применения различных систем приспособлений Ти – период производства изделий, месяцы УСТАНОВКА ЗАГОТОВОК И УСТАНОВОЧНЫЕ ЭЛЕМЕНТЫ ПРИСПОСОБЛЕНИЙ. 1. Принципы установки заготовок в приспособлениях. Точность обработки обеспечивается определенным положением заготовок относительно режущего инструмента. Положение заготовки при обработке характеризуется шестью степенями свободы, определяющими Рис. 3 Схема базирования призматической детали. Комплект баз: I - установочная база (точки 1, 2, 3); II - направляющая база (точки 4, 5); III - опорная база (точка 6). возможность перемещения и поворота заготовки относительно трех координатных осей. При полной ориентации заготовка лишается всех степеней свободы; при неполной – числа степеней свободы меньше шести. Лишение детали степеней свободы достигается наложением связей. Под связями подразумеваются ограничения позиционного характера, накладываемые на движения точек рассматриваемого тела. Для ориентировки призматического тела в пространстве необходимо соединить три точки 1, 2, 3 его нижней поверхности I двухсторонними позиционными связями с плоскостью XOY прямоугольной системы координат. Эти двухсторонние связи представляются в виде недеформируемых стержней, сохраняющих способность скользить вдоль осей ОХ и OY не отрываясь от плоскости ХОY, т.е. тело лишается 3-х степеней свободы: поступательного движения вдоль оси OZ и вращательного вокруг OX и OY не отрываясь от плоскости XOY. Т.е. тело 9 Рис. 4. Пример реализации схемы базирования детали по трем взаимно перепендикулярным плоскостям лишается трех степеней свободы: поступательного вдоль оси OZ и вращательного вокруг OX и OY. Плоскость II соединяется двумя связями или опорными точками (4 и 5) с плоскостью ZOY. Они лишают ее двух степеней свободы: перемещения вдоль оси ОХ и вращения вокруг OZ. Опорная точка 6 лишает деталь одной степени свободы – перемещения вдоль оси OY. Шесть наложенных двухсторонних позиционных связей обеспечивают заданную ориентировку тела относительно системы координат OXYZ и фиксирование тела в данном положении. Рис. 5. Схема базирования детали типа «Вал» (комплект баз: двойная направляющая - точки 1, 2, 3, 4; опорные - точки 5, 6). 10 При установке заготовки на опорные точки приспособления каждая их них реализует одну двухстороннюю связь. Под «опорной точкой» подразумевается идеальная точка контакта поверхности заготовки и приспособления, лишающая заготовку одной степени свободы, делая невозможным ее перемещение в направлении, перпендикулярном опорной поверхности. Число опор на которые устанавливают заготовку не должно быть больше шести. Правило шести точек: Для полного базирования заготовки в приспособлении необходимо и достаточно создать в нем шесть опорных точек, расположенных определенным образом относительно базовых поверхностей. Разрабатывая вопрос об установке детали, решают каких степеней свободы надо лишить деталь с помощью установочных элементов приспособления для получения заданных чертежом размеров. Для обеспечения устойчивого положения заготовки в приспособлении: 1. Расстояние между опорами следует выбирать наибольшим, т.к. в этом случае уменьшается влияние погрешности формы базовых поверхностей на положение заготовки в приспособлении. 2. При установке заготовки на опоры не должен возникать опрокидывающий момент. Закрепление заготовки осуществляется одной силой (например W1), вызывающей возникновение силы трения между нижней базой и опорами, что препятствует смещению заготовки в остальных направлениях. Опоры имеют ограниченную поверхность контакта и жестко закреплены в корпусе приспособления. Для того, чтобы определить положение валика в пространстве (рис.2), необходимо задать пять жестких связей, которые лишают его пяти степеней свободы: возможности перемещаться в направлении осей OX, OY и OZ и вращаться вокруг осей OX и OZ. Шестая степень свободы – Рис. 6. Схема базирования детали типа “Диск”.Комплект баз: установочная (точки 1, 2, 3); двойная опорная (точки 4, 5) и опорная база (точка 6). 11 вращение вокруг собственной оси – остается свободной. Поверхность детали, несущая три опорные точки называется главной базирующей поверхностью; боковая поверхность с 2-мя опорными точкам – направляющей, торцевая с одной опорной точкой – опорной. Цилиндрическая поверхность валика, несущая 4 опорные точки, называется двойной направляющей поверхностью. Торцевая поверхность валика является опорной базой. При обработке недостаточно жестких заготовок возникает необходимость увеличения Рис. 7. Пример реализации схемы базирования числа опорных точек сверх детали типа «Диск». шести. При установке прямоугольной заготовки с длинным кронштейном (рис. 6), у которого обрабатываются торцы бобышек применяется индивидуально подводимая опора 1, к которой заготовка прижимается силой W’. Это повышает жесткость технологической системы, позволяя использовать более производительные режимы резания. Дополнительные опоры выполняют только регулируемыми или самоустанавливающимися. При установке заготовки опоры индивидуально Рис.8 Применение дополнительной регулируемой опоры 12 подводятся (самоус-танавливаются) к поверхности заготовки, а затем стопорятся, превращаясь на время выполнения данной операции в жесткие опоры. Число дополнительных опор не ограничено, однако для упрощения конструкции приспособления их число следует брать минимальным. При разработке технологических документов (карт эскизов, схем наладки) схема базирования детали на станке изображается с помощью условные обозначения опор баз и зажимных усилий (ГОСТ 3.1107-81, СТ СЭВ 1803-79): Таблица 1 Условные графические обозначения опор. Примечание: На одном виде несколько однотипных опор допускается заменять одним обозначением с указанием их количества. Таблица 2 Условные графические обозначения зажимов Рис. 9. Размеры знаков условных обозначений опор, зажимов и установочных устройств. 13 Таблица 3 Установочные устройства Примечание: Установочно-зажимные устройства следует обозначать как сочетание обозначений установочных устройств и зажимов. Таблица 6. Рабочие поверхности опор, зажимов, установочных устройств. Примечание: Обозначение формы рабочих поверхностей наносят слева от обозначения опоры, зажима или установочного устройства. устройств (рифленая, резьбовая, шлицевая) обозначают 60Å 3 Рельеф рабочих поверхностей опор зажимов и установочных и наносят на их обозначение. Для указания типа приводов зажимов применяют следующие обозначения: - Р – пневматический; - Н – гидравлический; - Е – электрический; - ЕМ – электромагнитный; - М – магнитный. Обозначение вида привода зажима наносят слева от обозначения привода 14 2. Погрешности установки детали в приспособлениях. Установка – (по ГОСТ 21495-76) процесс базирования и закрепления заготовки и изделия. Погрешность установки – отклонение фактически достигнутого положения заготовки или изделия при установке от требуемого. Погрешность установки у, как одна из составляющих общей погрешности выполняемого размера суммируется из погрешностей базирования б, закрепления з и погрешностей заготовки, вызванных неточностью приспособления пр. По своему физическому смыслу величина у выражает погрешность положения заготовки. Так как величины б, з, пр представляют собой поле рассеяния случайных величин, то общая погрешность установки определяется как: у б 2 з2 2пр Базирование (по ГОСТ 21495-76) – придание заготовке или изделию требуемого положения относительно системы координат. Погрешность базирования – отклонение фактически достигнутого положения заготовки или изделия при базировании от требуемого. Погрешность базирования имеет место при несовмещении технологической и измерительной базы заготовок. Рис. 9 При данной установке (рис. 5) погрешность базирования для размера А равна 0, т.е. бА = 0. (технологическая и измерительная базы совмещены в плоскости 1), а погрешность базирования для размера В равна допуску на размер С, т.е. бВ = Т (технологическая база 1 не совмещена с измерительной 2). 15 Рис. 10 При установке заготовки на цилиндрический палец (рис.5) базовым отверстием различаются два случая. При посадке без зазора (разжимная оправка) погрешность базирования для размера А равна половине допуска на диаметр заготовки: бА Т 2 . При наличии зазора (жесткий палец) погрешность базирования для этого же размера возрастает на величину предельного изменения диаметрального зазора: бА Т 2 S . Для уменьшения или исключения погрешности базировниия следует совмещать технологические и измерительные базы, выбирать рациональные размеры и расположение установочных элементов, устранять или уменьшать зазоры при посадке заготовки на охватываемые и охватывающие установочные элементы. Погрешность закрепления заготовки представляет собой разность между наибольшей и наименьшей величиной проекций смещения измерительной базы на направление выполняемого размера при приложении к заготовке силы закрепления. Для партии заготовок погрешность закрепления равна нулю, если величина смещения постоянна. Согласно определению: з y max y min cos , где - угол между направлением выполняемого размера и направлением смещения измерительной базы. Погрешность закрепления з для размеров А и В (рис.4) не равна 0 ( = 0), а для размера Е: зЕ 0 , т.к. боковая (измерительная) база перемещается при зажиме заготовки в собственной плоскости ( = 90). Погрешность закрепления, как и погрешность базирования не влияет на точность диаметров и размеров, связывающих обрабатываемые при данном установе поверхности, а также на точность формы обрабатываемых поверхностей. Примеры значений погрешностей закрепления для некоторых типовых приспособлений: - з в тисках – 0,05 – 0,2 мм; 16 - прихватами – 0,01 –0,2 мм; - в кулачковом патроне – 0,04 – 0,1 мм; - в цанговом патроне – 0,02 – 0,1 мм. пр – погрешность положения приспособления. заготовки, зависящая от пр пр ус и , где пр – погрешность изготовления приспособления по выбранному параметру, зависящая от погрешности изготовления и сборки установочных и др. элементов приспособления. ус – погрешность установки приспособления на станке (допустимая величина ус = 0,005 – 0,02 мм). и – погрешность положения заготовки, возникающая в результате изнашивания элементов приспособления. Эта величина зависит от программы выпуска изделий, их конструкции и размеров, материала и массы заготовки, состояния ее базовой поверхности. При обработке плоскостных заготовок, а также торцовых поверхностей (уступов) тел вращения и при получении линейных размеров погрешности базирования, закрепления и приспособления являются векторами, лежащими на одной прямой и суммируются арифметически: у б з пр . ТИПОВЫЕ СХЕМЫ УСТАНОВКИ ЗАГОТОВОК В ПРИСПОСОБЛЕНИЯХ. 1. Установка деталей на наружную цилиндрическую поверхность. Рис. 11. Установка цилиндрической детали на плоскость. При установке валика в призму (рис. 8) погреш-ность базирования будет зависеть от угла призмы и допуска на диаметр D. Предположим, что на призму поочередно уста-новили два вала из партии: один с диаметром Dmax, другой с Dmin. Определим: - расстояние h1 между верхними образующими валов; - расстояние h2 между нижними образующими валов; 17 - расстояние h между их осями. Эти расстояния и будут погрешностями базирования соответствующих размеров при установке их по схемам рис. 7. h1 h1 AB1 AB2 D AB1 O1 B1 O1 A max 2 h1 T 1 h1 1 2 sin 2 AB2 O2 B2 O2 A h1 D max 2 1 1 sin 2 1 1 Dmin sin 2 2 Dmin 2 1 1 sin 2 1 1 Dmax Dmin sin 2 2 1 1 sin 2 h h AO1 AO2 h 2 h2 можно определить из равенства: E2 O1 O1 E1 h2 E2 O2 h h h T 2 sin 2 Dmax D h2 min h 2 2 D D T h2 min max h 2 2 2 sin h 2 h2 18 T T 1 1 2 2 sin 2 2 T 1 1 2 sin 2 При угле призмы = 90 погрешность базирования будет: h1 1.21T h 2 0.21T h 0.7T Рис. 12 Установка цилиндрической детали на призму. При установке по схемам, показанным на рис. 7 ( = 180) погрешности базирования будут: h1 T h2 0 h 0.5T Таким образом, наименьшая погрешность базирования возникает при выполнении обработки по схеме рис. 7-б. 2. Установка заготовок на центровые гнезда и конические фаски. Рис. 13. Установка детали на центровые гнезда В этом случае при установке в жестких центрах возможны погрешности в радиальном и осевом направлениях. На первом переходе погрешность в радиальном направлении создается погрешностью зацентровки, т.е. смещением оси центровых гнезд относительно оси заготовки. Приближенно эту погрешность можно определить по формуле: 19 ц 0,25Т , где Т – допуск на диаметральный размер заготовки. Эта погрешность проявляется в виде биения заготовки. На последующих переходах погрешность уменьшается и вместе с другими составляющими погрешности укладывается в поле допуска. В осевом направлении погрешность создается за счет колебаний размера левого центрового гнезда, являющегося и упорной базой. l y , где y – длина конуса центрового отверстия; Рис. 14 Погрешность глубины y – разность между наибольшей и конической фаски центрового отверстия наименьшей длиной конуса центрового гнезда у партии заготовок. Для обеспечения постоянного положения заготовки в осевом направлении детали устанавливают по схеме, приведенной на рис. 9-б. Погрешности базирования для осевых размеров. Установка на жесткий передний и выдвижной задний центры: Рис. 15. Базирование заготовки на жесткий передний центр Погрешности базирования: бL1 бL4 Tц бL2 0 бL3 T Tц 20 Установка на плавающий передний и выдвижной задний центры: Рис. 16. Базирование заготовки на плавающий передний центр Погрешности базирования: бL1 бL12 бL4 0 , бL3 T где Т – допуск на длину заготовки; Тц – допуск на глубину левого центрового отверстия. 3. Базирование по плоскости и отверстию с применением установочных пальцев. Эти схемы делятся на три группы: - по торцу и отверстию; - по двум перпендикулярным плоскостям и отверстию с осью параллельной плоскости; - по плоскости и двум перпендикулярным к ней отверстиям. а) б) Рис. 17. Базирование по отверстию и торцу (основная база – отверстие). 21 Установка детали на высокий цилиндрический палец отнимает у нее 4 степени свободы, на низкий цилиндрический палец – 2, на высокий срезанный – 2, на низкий срезанный – одну степень свободы. При базировании деталей по торцу и отверстию в зависимости от условий обработки возможны 2 случая: - основной базирующей поверхностью является отверстие (рис. 13); - основной базирующей поверхностью является торец (рис. 14). Когда базирование детали осуществляется на длинное отверстие с установкой на высоком цилиндрическом пальце (рис. 13-а) отверстие является основной базой, несущей 4 опорные точки, торец – одну; у детали составлена одна степень свободы – возможность вращаться вокруг пальца. Аналогичной является схема базирования на жесткой токарной оправке (рис. 13-б). В случае, когда за основную базу принимаю торец детали (деталь устанавливают на плоскость, а отверстие является дополнительной базой) установочные пальцы должны быть низкими (рис. 14). Рис. 18 Базирование по отверстию и торцу (основная база – торец). Например для обработки отверстия d перпендикулярного плоскости Б за главную базу принимаем плоскость Б, т.к. требуется обеспечить перпендикулярность оси обрабатываемого отверстия к этой плоскости. В результате базирования заготовка лишается трех степеней свободы (вращения вокруг осей Y и X и движения вдоль оси Z). Так как деталь круглая и одна степень свободы может остаться, то вторая база должна лишать деталь 2-х степеней свободы: перемещений по осям X и Y. Таким элементом является цилиндрический палец с короткой опорной поверхностью. Высота пальца l выбирается из условия отсутствия заклинивания при установке на него детали: l 22 100 , n где n – отклонение от перпендикулярности торца и оси базового отверстия (на 100 мм длины). - зазор в сопряжении отверстия детали с установочным пальцем. При базировании детали по двум перпендикулярным плоскостям и отверстию с осью параллельной плоскости для полного прилегания плоскости к опорам и выдерживания размера L±Т/2 необходимо палец выполнять ромбической или срезанной формы (рис. 15). Рис. 19. Схема базирования по двум перпендикулярным плоскостям и отверстию с осью параллельной плоскости Установка заготовки на два цилиндрических отверстия с параллельными осями и перпендикулярную к ним плоскость. Эта схема (рис. 16) используется при обработке деталей малых и средних размеров типа корпусов, плит, рам и картеров. Ее достоинства: простая конструкция приспособления и возможность достаточно полно выдержать принцип постоянства баз на различных операциях технологического процесса. Базовую плоскость заготовки подвергают чистовой обработке, а отверстия разворачивают по 7 квалитету (Н7). установочными элементами служат опорные пластины и 2 низких жестких пальца. Заготовку 1 ставят на пластины 2 и пальцы 3 и 4. При допуске T на расстояние L между осями базовых отверстий одно из них (рис. 16-б) может занимать два предельных положения. Очевидно, что область, образованная пересечением окружностей а и б, относится ко всем заготовкам данной партии. если правый палец будет цилиндрическим, то его диаметр должен быть равен d-T; в этом случае при базировании возможно возникновение покачивания заготовки на левом пальце от среднего положения на величину Т 2 . Более целесообразна ромбическая (срезанная) форма пальца с цилиндрической ленточкой шириной 2е. Величина покачивания х составляет (рис.16-в): 23 Рис. 20 Схема базирования заготовки по плоскости и двум отверстиям с параллельными осями Рис. 21 Расчетная схема для определения погрешности при установке детали на плоскость и два отверстия с параллельными осями 24 x r r 2 eT Пример: r = 50 мм, е = 10 мм, Т = 0,1 мм х 50 50 2 10 0,1 0,02 мм При цилиндрической форме пальца (диаметр = d-T) покачивание составит 0,1 мм. Погрешность при установке детали на 2 пальца (цилиндрический и ромбический) характеризуется максимальным и минимальным смещением заготовки от ее среднего положения в направлениях, перпендикулярных к осям цилиндрического и ромбического пальцев. Минимальное смещение оси цилиндрического пальца: x1min 1 Максимальное смещение оси цилиндрического пальца: x1max 1 T1 T '1 T '1из , 2 2 2 где 1 - минимальный радиальный зазор в посадке отверстия на палец. Т1 – допуск на диаметр базового отверстия; Т’1 – допуск на диаметр цилиндрического пальца; Т’1из – допуск на его износ. Минимальное смещение оси ромбического пальца: x2 min 2 Максимальное смещение оси цилиндрического пальца: T T' T' x2 max 2 2 2 2из , 2 2 2 где 2 - минимальный радиальный зазор в посадке отверстия на палец. Т2 – допуск на диаметр базового отверстия; Т’2 – допуск на диаметр ромбического пальца; Т’2из – допуск на его износ. По величинам смещений находят погрешность установки для выполняемых размеров. Наибольший угол поворота заготовки от ее среднего положения равен (с учетом максимальных смещений пальцев в отверстиях): O'1 O2 O1O2 T' T' T T' T T' 1 1 1 из1 2 2 из 2 2 2 2 2 2 2 sin L sin Для уменьшения угла расстояние L следует брать наибольшим. При прямоугольной в плане базовой плоскости базовые отверстия располагают на концах ее диагонали. 25 4. Конструкции установочных элементов. В качестве установочных элементов применяют опоры, которые могут быть основными или вспомогательными. Основными называются опоры, координирующие обрабатываемую деталь в 3-х взаимно перпендикулярных плоскостях, т.е. опоры, лишающие деталь всех степеней свободы относительно приспособления. Так как опоры воспринимают кроме веса детали еще и силы зажима и силы резания, которые могут быть значительны, то их изготавливают из высокопрочных, износостойких материалов. Поэтому для опор применяют сталь 20Х или сталь 20 с цементацией рабочих поверхностей опор на глубину 0,8 – 1,2 мм и закалки до твердости HRC 58 – 62. Рабочие поверхности для обеспечения лучшего прилегания к ним обрабатываемой детали должны быть по возможности небольших размеров. Для легкой и быстрой смены опор в случае износа или повреждения необходимо обеспечить свободный доступ к ним. Основные опоры должны находиться на наибольшем расстоянии друг от друга так, чтобы направление усилия резания, зажима и центр тяжести детали находились в пределах опорного треугольника. Основные опоры могут быть постоянными и регулируемыми. Постоянные опоры. Для установки деталей плоскими поверхностями в приспособлениях используют цилиндрические (штыри) и пластинчатые опоры. Цилиндрические опоры бывают трех видов: с плоской, сферической и насеченной головкой (рис. 18). Рис. 22 Постоянные цилиндрические опоры (штыри). 26 Для установки заготовки на черновые базовые поверхности применяют установочные штыри с насеченной (ГОСТ 13442-68) или сферической (ГОСТ 13441-68), а для установки на обработанные базовые поверхности – с плоской головкой (ГОСТ 13440-68). Отверстия под опоры в корпусе приспособления выполняются сквозными, сопряжения опор с отверстиями (Н7/р6; Н7/r6). Предельные нагрузки на опоры со сферической головкой при установке стальных и чугунных заготовок: Таблица 1. Характеристики опорных штырей. Предельная нагрузка для опор, кН со сферич. головкой с рифленой головкой Диаметр головки D, мм 10 16 25 40 2 5 12 30 4 10 25 60 Для заготовок из цветных сплавов нагрузки на опоры следует уменьшать на 30-40%. Опорные пластины (ГОСТ 4743-68) бывают двух исполнений: плоские и с косыми пазами. Пластины крепятся двумя или тремя винтами к корпусу приспособления или плите. Плоские пластины целесообразно закреплять на вертикальных стенках корпуса, т.к. при горизонтальном их положении в углублениях под головками винтов скапливается мелкая стружка, которую трудно удалить. Пластины с косыми пазами устанавливают на горизонтальных поверхностях корпуса. В этом случае стружка при движении устанавливаемой детали попадает в углубления Рис. 23. Опорные пластины 27 (косые пазы) и не нарушает контакта при установке. Пластины, как и штыри, закрепляют в корпусе и обрабатывают в сборе в случаях повышенных требований к точности базирования детали в приспособлении. Опорные призмы. Применяются для установки деталей наружными цилиндрическими поверхностями. Стандартная призма применяется для установки коротких изделий или как элемент опорной призмы, предназначенный для базирования длинных изделий. Предельно допустимую нагрузку на призму с углом = 90 из условий контактной прочности можно определять для заготовки из стали или чугуна по формуле: Q 7bD, где b – длина линии контакта заготовки с призмой, мм; D – диаметр заготовки, мм. Призмы предназначены для базирования деталей с 5 – 150 мм. Материал – сталь 20Х, твердость рабочих поверхностей HRC 55 – 60. Глубина цементированного слоя 0,8 – 1,2 мм. При установке детали по черновой базе рабочие поверхности делаются узкими. Рис. 24. Опорные призмы. Установочные пальцы. Установку заготовок с базированием на отверстия производят на пальцы и оправки. Дополнительной базой служит торец заготовки, определяющий ее положение по длине, а также различные элементы (шпоночная канавка, радиальное отверстие и пр.), координирующие угловое положение заготовки. Постоянные пальцы запрессовываются в корпус приспособления по Н7 28 r 6 , а диаметры их установочных поверхностей выполняются по полям допуска f или g от 9 до 6 квалитета в зависимости от требуемой точности базирования. Сменные пальцы устанавливаются в закаленной промежуточной втулке по посадке Н7 h 6 или по резьбе. Пальцы диаметром до 16 мм изготавливают из стали У7А, диаметром более 16 мм – из стали 20Х с цементацией на глубину 0,8 – 1,2 мм и закалкой до твердости HRC 50…55. а) б) Рис. 25. Установочные пальцы. а – постоянный цилиндрический, б) – постоянный ромбический, в) – сменный цилиндрический в) Центры. При обработке валов и некоторых других деталей с базированием на центровые гнезда (конические фаски) в качестве установочных элементов используют центры с углом равным 60 (рис. 22). Кроме функции установки детали, центры при обработке на токарных и шлифовальных станках могут передавать крутящий момент от шпинделя станка (рис. 22-в, г). Например, поводковые центры, передающий крутящий момент от вдавливания рифлений или узких ленточек в поверхность конической фаски при приложении к центру осевой силы. Они обеспечивают передачу момента, но портят поверхность фаски. Применяются для чистовой обработки. Центры изготавливаются из стали 45, У6А, У8А и подвергают термической обработке до твердости HRC 40…42. Износостойкость центров может быть повышена наплавкой или напылением твердого сплава. Сохранение правильной формы заднего центрового гнезда при токарной обработке обеспечивается применением вращающихся центров. 29 а) б) в) г) Рис. 26 Разновидности конструкции центров. а - жесткий центр, б - срезанный центр для деталей типа труб, гильз, в – поводковый центр с тремя узкими ленточками, г – поводковый центр с рифлениями на конической поверхности. Плавающий поводковый центр состоит из самоустанавливающейся сферической шайбы 2 с рифлениями 1 на трех участках, центра 3 плавающей конструкции, который смонтирован в промежуточной втулке 4 и шайбы 5, являющейся упорной базой. Рис.27. Плавающий поводковый центр. 30 При установке заготовки в центрах имеют место контактные деформации в местах сопряжения центровых гнезд с центрами. Осадка заготовки в поперечном и осевом направлениях выражается параболической зависимостью от приложенной радиальной или осевой силы. Поперечное смещение заготовки (мкм) определяется по эмпирической формуле. y1 C1 Py0.5 где С1 – постоянная, зависящая от наружного диаметра гнезда; Py – радиальная сила, Н Осевое смещение заготовки (мкм): y 2 C 2 Px0.5 Коэффициенты С1 и С2 для заготовок из сталей 40 и 45, широко применяемых для деталей класса валов при давлении на поверхности контакта до 800 МПа имеют значения, приведенные в табл. 2. Таблица 2 Коэффициенты для формул расчета контактных деформаций при установке в центрах. Коэффициенты Диаметр центрового отверстия D, мм 1 2 2,5 4 5 6 7,5 10 20 30 С1 5 3,7 2,7 1,8 1,2 1 0,9 0,7 0,3 0,2 С2 3,8 2,7 0,1 1,3 0,9 0,8 0,7 0,5 0,25 0,17 Оправки. Для обеспечения точности и быстроходности машин ужесточаются требования к концентричности поверхностей их деталей. Во многих случаях допускается несоосность поверхностей менее 0,01 мм. Эта точность достигается применением центрирующих устройств приспособлений: жестких и разжимных оправок, которые играют роль установочного и зажимного механизма. Из группы жестких оправок наиболее распространены конусные и цилиндрические оправки. Цельная конусная оправка (рис. 24). Применяется в единичном и мелкосерийном производстве. Погрешность базирования наружной поверхности относительно внутренней = 0. б 0 Отверстие у заготовки обрабатывается по Н7. Точность центрирования 0,005 – 0,01 мм. Недостаток – отсутствие точной фиксации заготовки по длине. Конусность: D D2 1 К 1 1 1000 4000 L - половина угла при вершине конуса ( = 1…3’). 31 Рис. 28 Цельная конусная оправка 1 D , устанавливаемых с натягом (рис. 25). Применяется для обработки на токарных, иногда шлифовальных станках в серийном, крупно-серийном и массовом производстве деталей с массивными стенками. На этой оправке можно обрабатывать наружный диаметр и правый торец. Погрешность базирования наружной поверхности относительно внутренней б 0 . Базирующее отверстие в заготовке обрабатывается по Н7. Точность центрирования 0,005 – 0,01 мм. При необходимости подрезать оба торца детали используют оправку без буртика. Для точного положения детали по длине применяют подкладные кольца. Оправка с буртиком для установки детали с зазором. Положение заготовки по длине определяется буртом оправки; от проворачивания на оправке ее предохраняет гайка 1 или шпонка 2 (при наличии в заготовке шпоночной канавки). Базовое отверстие заготовки обрабатывается по 7 квалитету. Точность центрирования зависит от зазора и обычно не превышает 0,02 – 0,03 мм. Оправки выполняют из стали 20Х с цементацией на глубину 1,2 – 1,5 мм и закалкой до твердости HRC 55…60. Рабочие поверхности шеек шлифуют до Ra 0,63 – 0,32. На центровых гнездах предусматривают фаски или поднутрения в целях защиты их от повреждений. Для передачи момента на конце оправки предусматривают квадрат, лыски или поводковый палец. Основное преимущество оправок с буртом в том, что в них строго определено положение детали вдоль оси оправки, а это позволяет работать на заранее настроенных станках. Оправка 32 с буртиком для коротких деталей L Рис. 29 Цилиндрическая оправка для посадки с натягом. Рис. 30. Цилиндрическая оправка для посадки с зазором 33 Цанговые оправки относятся к группе разжимных. Консольная разжимная оправка с цангой, т.е. разрезной пружинящей гильзой имеющей от 3 до 8 лепестков на рабочей шейке. Она выполняется из высоко углеродистой стали У10А или пружинной 65Г (65С2) и термически обрабатывается до твердости HRC 58…62 на губках и до твердости HRC 39 … 45 в хвостовой части. Угол конуса цанги 30 - 40. При меньших углах возможно заклинивание. Рис. 31. Консольная цанговая оправка. 1 – корпус, 2 – конус, 3 – деталь. Заготовка закрепляется затяжкой внутреннего конуса. Базовое отверстие заготовки обрабатывается по Н9 – Н12. Точность центрирования 0,02 – 0,04 мм. Цанги бывают тянущие или толкающие. Оправки с гидропластмассами. Зажим детали осуществляется затягиванием винта, который через плунжер передает давление на гидропластмассу и разжимает тонкостенную гильзу. На концах втулка имеет утолщенные бурты, которыми она с натягом (s6, r6) насаживается на корпус оправки. Поэтому при расчете втулку рассматривают как жестко закрепленную по краям балку. Толщина втулки (0,03 – 0,05)R. Материал втулки гильзы – углеродистая У7А или легированная сталь Рис. 32. Оправка с гидропалстмассой. 30ХГСА. 1 – корпус, 2 – тонкостенная втулка, 3 – плунжер, 4 – винт, 5 – гидропластмасса, 6 – деталь. 34 Гидропластмасса применяется двух составов: 1) СМ: 20% полихлорвинила, 78% дибутилфталата, 2% стеарата кальция; t плавления 135С, объемная усадка 12% при охлаждении до 10С. 2) 10% полихлорвинила, 88% дибутилфталата, 2% стеарата кальция. Более текуч, имеет t плавления 120 С и усадку 10%. Кроме перечисленных применяются разжимные оправки с тремя сухарями, разжимаемые внутренним конусом; с гофрированными втулками (при сжатии втулок с боков цилиндрическая часть их выпучивается и прочно закрепляет заготовку). Регулируемые опоры применяются в том случае, когда колеблется величина припуска на обработку у различных партий деталей. В основной плоскости из трех опор одну делают регулируемой. Регулируемые винтовые опоры могут быть с отверстием или шестигранной головкой (рис. 29). Самостоятельно регулируемые опоры используют в направляющей и упорной плоскостях. Винтовые регулируемые опоры могут применяться в качестве Рис. 33. Винтовые регулируемые опоры основных и вспомогательных. Самоустанавливающиеся опоры. Представляют собой постоянную опору, разложенную на 2 или 3 точки. Нагрузка, приходящаяся на каждую точку суммируется в центре, давая здесь равнодействующую, воспринимаемую корпусом приспособления. а б Рис. 34 Самоустанавливающиеся опоры. а – качающаяся, б - клиноплунжерная 35 Вспомогательные опоры применяют дополнительно к основным когда необходимо повысить жесткость и устойчивость обрабатываемых деталей. Они бывают регулируемого, подводимого и самоустанавливающегося типа. При установке каждой заготовки опоры подводятся (или самоустанавливаются) к поверхности заготовки, а затем стопорятся превращаясь на время выполнения операции в жесткие опоры. Если количество основных опор не должно превышать шести, то число дополнительных опор не ограничено каким либо пределом, однако для упрощения конструкции приспособления число их должно быть минимальным. Вспомогательные опоры бывают: - винтовые (конструкции аналогичны регулируемым основным опорам); - клиновые (рис. 31-б); - самоустанавливающиеся (рис 31-а). Самоустанавливающиеся опоры рекомендуется применять когда деталь имеет ступенчатую базовую плоскость. Размер h между плоскостями детали колеблется в пределах допуска и полное совмещение ступенчатых поверхностей невозможно. В этом случае за базу принимают одну плоскость, а под другую подводят самоустанавливающуюся вспомогательную опору. а б Рис. 35. Вспомогательные опоры а – подпружиненная самоустанавливающаяся, б – клиновая регулируемая. Примером конструкции самоустанавливающейся опоры является опора по ГОСТ 13159-67. Головка плунжера 1 при освобожденном винте 3 под действием пружины выступает несколько над тремя основными опорами при установке детали. Она силой своего веса опускает плунжер и устанавливается на основные опоры. После закрепления детали плунжер стопорится винтом 3, превращаясь в основную опору. Сила пружины должна быть такой, чтобы установленная на три основные опоры, но не 36 закрепленная деталь не приподнималась плунжерами. Угол скоса должен быть самотормозящим (6 - 10), т.к. в противном случае при стопорении он может подниматься вверх и приподнимать деталь с основных опор. Перед установкой каждой новой детали плунжер необходимо освобождать, иначе деталь может либо не коснуться основных опор, либо головки плунжера. Гайка 4 служит для предотвращения от попадания стружки. При механизации и автоматизации приспособлений применяют вспомогательные опоры, управляемые с помощью пневмо- и гидроприводов. Рис. 36 Регулируемая вспомогательная опора по ГОСТ 13159-67 37 ЗАКРЕПЛЕНИЕ ЗАГОТОВОК И ЗАЖИМНЫЕ УСТРОЙСТВА (ЭЛЕМЕНТЫ) ПРИСПОСОБЛЕНИЙ. Назначение зажимных устройств. Основное назначение зажимных устройств состоит в обеспечении надежного контакта заготовки с установочными элементами и предупреждении ее смещения и вибраций в процессе обработки. Зажимные устройства используются также для обеспечения правильной установки и центрирования заготовки. В этом случае выполняют функцию установочно-зажимных элементов. К ним относятся самоцентрирующие патроны, цанговые зажимы и др. устройства. Рис. 37 Действие сил резания при зенковании Заготовка может не закрепляться, если 1) обрабатывается тяжелая деталь (устойчивая), по сравнению с весом которой силы резания незначительны. 2) сила, возникающая в процессе резания, приложена так, что не нарушает установки детали, например при протягивании отверстий или зенковании фасок (рис. 37). В процессе обработки на заготовку могут действовать следующие силы: 1) силы резания, которые могут быть переменными вследствие разного припуска на обработку, свойств материала, затупления режущего инструмента; 2) вес заготовки (при вертикальном положении детали); 3) центробежные силы, возникающие в результате смещения центра тяжести детали относительно оси вращения. 4) инерционные силы, имеющие место при возвратно-поступательном движении. К зажимным устройствам приспособлений предъявляются следующие основные требования: 1) При закреплении заготовки не должно нарушаться ее положение, достигнутое установкой; 2) Силы зажима должны исключать возможность перемещения детали и ее вибрацию в процессе обработки; 38 3) Деформация детали под действием зажимных сил должна быть минимальной. 4) Смятие базирующих поверхностей должно быть минимальным, поэтому усилие зажима должно быть приложено так, чтобы деталь прижималась к установочным элементам приспособления плоской базирующей поверхностью, а не цилиндрической или фасонной. 5) Зажимные устройства должны быть быстродействующими, удобно расположенными, просты по конструкции и требовать минимальных усилий от рабочего. 6) Зажимные устройства должны быть износоустойчивыми, а наиболее изнашиваемые детали – сменными. 7) Силы зажима должны быть направлены на опоры, чтобы не деформировать деталь, особенно нежесткую. Рис. 38 Выбор рационального направления действия силы зажима Основные характеристики простых и комбинированных механизмов. Для любого простого механизма можно определить передаточное отношение сил и передаточное отношение перемещений. Передаточное отношение сил: W i W Q i Q где W – сила, развиваемая на ведомом звене (сила зажима); Q – сила, приложенная к ведущему звену механизма. Соответственно для идеального механизма, т.е. механизма без трения: iид Wид Wид Q iид Q Передаточное отношение перемещений: S iп w SW S Q iп SQ где SW – перемещение ведомого звена; SQ – перемещение ведущего звена; Передаточное отношение i и iид всегда >1 и характеризуют выигрыш в силе; iп – всегда <1, и характеризует проигрыш в пути. 39 КПД механизма: W i Wид iид Для комбинированных механизмов, состоящих из нескольких последовательно сблокированных простых, передаточное отношение сил, перемещений и КПД определяется по формулам: i i1 i 2 i k i i1п i 2 п i kп 1 2 k где k – число простых механизмов в комбинированном приводе. Сила зажима W, развиваемая комбинированным механизмом, определяется по формуле: W Q i1 i 2 i k , где Q – исходная сила зажима на рукоятке или штоке привода; Если характеристики i1 i2 ik простых механизмов заранее неизвестны, то расчет силы зажима W, развиваемой комбинированным механизмом, можно выполнить последовательно. Вначале определяем силу W1 Q i1 , развиваемую первым простым механизмом; затем рассматривая ее как исходную силу W2 W1 i2 , развиваемую вторым механизмом, и т.д. Количество простых силовых механизмов ограничено, и все они в основе своей являются клиновыми или рычажными. Следовательно, комбинированные механизмы представляют собой систему из клиновых, рычажных или клино-рычажных механизмов. Методика расчета потребных сил зажима. Величину потребных сил зажима определяют решая задачу статики на равновесие твердого тела под действием всех приложенных к нему сил и моментов.Расчет сил зажима производится в 2-х основных случаях: 1) при использовании имеющихся универсальных приспособлений с зажимными устройствами, развивающими определенную силу; 2) при конструировании новых приспособлений. В первом случае расчет зажимной силы носи проверочный характер. Найденная из условий обработки необходимая зажимная сила должна быть меньше или равна той силе, которую развивает зажимное устройство используемого универсального приспособления. Если это условие не выдерживается, то производят изменение условий обработки в целях уменьшения необходимой зажимной силы с последующим новым проверочным расчетом. Во втором случае методика расчета зажимных сил заключается в следующем: 40 1) 2) 3) 4) Выбирается наиболее рациональная схема установки детали, т.е. намечается положение и тип опор, места приложения сил зажима с учетом направления сил резания в самый неблагоприятный момент обработки. На выбранной схеме стрелками отмечаются все приложенные к детали силы, стремящиеся нарушить положение детали в приспособлении (силы резания, силы зажима) и силы, стремящиеся сохранить это положение (силы трения, реакции опор). При необходимости учитываются и силы инерции. выбирают уравнения равновесия статики, применимые к данному случаю и определяют искомое значение величины сил зажима Q1. Приняв коэффициент надежности закрепления (коэффициент запаса), необходимость которого вызывается неизбежными колебаниями сил резания в процессе обработки, определяется фактически потребная сила зажима: Q K Q1 Коэффициент запаса К рассчитывается применительно к конкретным условиям обработки по формуле: 5 К Ki , i 0 где К0 = 1,5 – гарантированный коэффициент запаса для всех случаев; К1 – коэффициент, учитывающий состояние поверхности заготовок: К1 = 1,2 – для черновой поверхности; К1 = 1 – для чистовой поверхности; К2 – коэффициент, учитывающий увеличение сил резания от прогрессирующего затупления инструмента (К2 = 1,0 – 1,9) К3 – коэффициент, учитывающий увеличение сил резания при прерывистом резании (К3 = 1,2). К4 – коэффициент, учитывающий постоянство силы зажима, развиваемой силовым приводом приспособления. (К4 = 1 – для механизированных силовых приводов (пневматических, гидравлических); К4 =1,3 – для ручного привода с удобным расположением рукояток; К4 =1,6 – для ручного привода с неудобным расположением рукояток (угол поворота рукояток более 90, неудобное для работы расположение); К5 – данный коэффициент учитывается только при наличии крутящих моментов, стремящихся повернуть обрабатываемую деталь. К5 = 1 – при установке детали базовой плоскостью на опоры с ограниченной поверхностью контакта (штыри); К5 = 1,5 – если деталь устанавливается на планки и др. элементы с большой поверхностью контакта. 41 Примеры расчета зажимных усилий. При расчете зажимного устройства, предупреждающего смещение заготовки под действием силы возможны следующие варианты взаимной ориентации сил резания и зажимных усилий: 1) Силы резания Р и силы зажима Q одинаково наравлены и действуют на опоры. Этой схеме соответствует протягивание отверстий, обтачивание в центрах, цекование бобышек и др. При постоянном значении Р принимают: Q=0 2) Сила резания Р направлена против зажимного усилия. Q kP , где k – коэффициент запаса > 1. 3) Сила резания стремится сдвинуть заготовку с установочных элементов. Эта схема характерна для тех случаев, когда подача инструмента меняется в разных направлениях. К ним относятся: маятниковое фрезерование, фрезерование замкнутых контуров и т.д. Смещение заготовки предупреждается силами трения, возникающими в местах контакта заготовки с установочными и зажимными элементами. 42 P Q f1 Q f 2 , где f1 и f2 – коэффициенты трения заготовки с установочными и зажимными элементами. С учетом коэффициента запаса k > 1, получим: kP Q f1 f 2 Коэффициент трения f2 принимается при контакте с опорными пластинами 0,1 – 0,16. Если поверхность заготовки не обработана, при контакте со сферическими штырям f2 = 0,2 – 0,3. При контакте с рифлеными опорами или кулачками f2 до 0,7 в зависимости от рисунка рифлений и глубины. 4) Усилия резания направлены на опоры (Р1) и одновременно сдвигают деталь по установочным элементам. P2 Q f1 P1 Q f 2 Q k P2 P1 f 2 f1 f 2 5) Сила резания Р1 направлена против зажимного усилия и одновременно сдвигает заготовку(Р2).Рассчитывают 2 силы: Q1 k P1 Q2 k P2 P1 f 2 f1 f 2 Из полученных значений Q1 и Q2 выбирают большее и принимают за расчетную величину Q необходимой силы зажима. Направление действия сил P1 и Р2 зависит от ориентации сил Рх, Ру, и Рz при обработке. 43 6) Заготовка, установлена в патроне и находится под действием момента М и осевой силы P. M Qc f R где Qc – суммарная сила зажима всеми кулачками: Q Q c , z где z – число кулачков в патроне. С учетом коэффициента запаса k потребная сила, развиваемая каждым кулачком, будет: Q kM f Rz 7) Заготовка центрируется по выточке и прижимается к трем опорам двумя или несколькими прихватами. В процессе обработки возникают сдвигающий момент и осевая сила. При равных реакциях опор и при наличии жесткой установки в тангенциальном направлении (т.е. касательно к поверхности заготовки в месте приложения зажимной силы) сила Q находится из равенства: k M Q f 2 R2 Q f 1 R1 P R1 f 1 откуда: Q k M P R1 f 1 f 2 R2 f 1 R1 8) Заготовка центрируется с помощью оправки и удерживается от проворота моментом трения на кольцевой площадке бурта оправки и между зажимом и заготовкой. 44 Dd k M р Q R1 f 1 f 2 4 kMр Q Dd R1 f 1 f 2 4 Если тангенциальная жесткость зажима незначительна, то сила трения (момент трения) между прихватами и заготовкой не учитывается. 9) Цилиндрическая заготовка закреплена в призме с углом без упора в торец. При действии на заготовку момента сил резания Мр, стремящегося провернуть заготовку вокруг оси и осевой силы Рх потребная сила зажима определяется из условий: k M p Q' f 1 R 2 N f 2 R 45 f 2 k Px Q' ' f 1 sin 2 здесь N (из треугольника векторов): Q' 2N sin 2 Откуда: kMp k Px Q' ' Q' , f R f1 R 2 f f2 sin 1 sin 2 2 Q Q 'Q ' ' Классификация зажимных механизмов. Силовые механизмы приспособлений делятся на простые и комбинированные, т.е. состоящие из двух или трех сблокированных простых механизмов. К простым механизмам относятся клиновые, винтовые, эксцентриковые рычажные и др. Простые механизмы называют зажимами. Комбинированные механизмы обычно выполняются как винторычажные, эксцентрико-рычажные и др. В тех случаях, когда простые или комбинированные механизмы используются в компоновках с механизированными приводами (пневматическими и др.) их называют механизмами-усилителями. По числу ведомых звеньев механизмы делятся на однозвенные, двухзвенные и многозвенные. Каждый силовой механизм имеет ведущее звено, к которому прикладывается исходная сила, и одно или несколько ведомых звеньев (прижимных планок, плунжеров, кулачков), передающих обрабатываемой детали силы зажима. Многозвенные механизмы зажимают одну деталь в нескольких точках или несколько деталей в многоместном приспособлении одновременно и с равными силами. По степени механизации силовые механизмы бывают ручные, механизированные и автоматизированные. Механизированные зажимы работают от энергии, передаваемой приводом. Автоматизированные зажимы приводятся в действие перемещающимися столами, суппортами, шпинделями станков или центробежными силами вращающихся масс и осуществляют зажим и раскрепление без участия рабочего. 46 Винтовые механизмы. Применяют в приспособлениях с ручным закреплением заготовок, в приспособлениях механизированного типа, а также в автоматических приспособлениях. Они просты, компактны и надежны в работе. Винты изготавливаются из стали 45 с т.о. до HRC 35 – 40. Направляющая резьбовая втулка выполняется из углеродистой стали 35 или 45 без закалки. Номинальный диаметр винта в мм определяется из соотношения: d C Q где С= 1,4 коэффициент для метрической резьбы; Q – сила закрепления заготовки, Н; - допустимое напряжение растяжения (сжатия) (для винтов из стали 45 - = 80 – 100 МПа). Диаметр округляется до ближайшего большего значения. В приспособлениях применяют резьбы от М8 до М42. а б в Рис. Конструктивные разновидности торцов винта. а - со сферическим концом, б - с плоским концом, в - с башмаком (для предупреждения порчи заготовки) Момент, развиваемый на рукоятке или маховичке, для получения заданной силы закрепления. Для винта по рис. –а: М 0,1dQ QDf Для винта по рис. –б: М 0,1dQ 3 Для винта по рис. –в: М 0,1Qd r Рассчитанное значение момента затяжки зажимного винта не должно превышать значения, допустимого по эргономичности в зависимости от конструктивного исполнения рукоятки или маховичка. где f = 0,15 – коэффициент трения; 47 Клиновые механизмы. Тело под действием силы Q перемещается по плоскости. Возникает нормальная реакция N и сила трения F, отклоняющая реакцию опоры от нормального направления на угол . Этот угол называется углом трения. Из рис. видно, что: tg F N Коэффициент трения скольжения f равен: f Рис. Рис. 48 F f tg , arctgf . N Реакция опоры при наличии трения на контактных поверхностях Система сил, действующая на клин с трением скольжения по поверхностям В силовых механизмах клин может работать с трением на двух поверхностях (наклонной поверхности и основании клина) или с трением только по наклонной поверхности (например, в цанговых патронах). На рис.___ показана схема действующих на зажатый односкосый клин с трением по двум поверхностям. Принятые обозначения: N – нормальная сила на наклонной плоскости, F – сила трения на наклонной плоскости, W1 – нормальная реакция основания, F1 – сила трения на основании клина. При любом угле скоса зажатый клин стремится вытолкнуть сила обратного действия Род, которая является горизонтальной составляющей нормальной реакции N (W – ее вертикальная составляющая). Силе Род противодействует сила трения F1 на основании клина и горизонтальная составляющая F ’силы трения F на наклонной поверхности клина. Условие равновесия клина: Pод F cos F1 с учетом того, что F N tg для рис ____ : tg F W F ' W tg cos Сила трения на основании клина: F1 W1 tg1 где 1 – угол трения на основании клина. Величина нормальной реакции на основании клина: sin W1 W F sin W 1 tg W 1 tg tg cos F1 W tg Для предельного случая, когда клин переходит в несамотомозящий: Pод W tg Подставив значения Род, F ‘, F1 в условие предельного случая самоторможения: W tg W tg W tg 1 1 tg tg tg tg tg 1 tg 1 tg tg при малых углах слагаемое tg1 tg tg 0 , а величина тангенсов углов близка к их значению в радианах. Тогда: Считая, 1 : 1 2 (*) Для клина с трением только по одной плоскости – наклонной ( 1 0 ): 49 (**) Условия самоторможения клина соответственно будут: 2 Клин и сопряженные с ним детали обычно выполняют из стали с чисто обработанными (шлифованными) поверхностями. Для этих поверхностей в зависимости от условий работы клина принимают: f = tg = 0,1; = 543’ f = tg = 0,15; = 830’ Тогда условия самоторможения соответственно будут: для клина с трением на двух поверхностях: 11 при f 0,1 17 при f 0,15 для клина с трением только по наклонной поверхности: 543' при f 0,1 830' при f 0,15 Для надежности заклинивания углы при расчетах берут меньше предельных, исходя из потребного запаса самоторможения. а) б) Рис. Использование клиновых механизмов в приспособлениях а – винтовой зажим с клином-усилителем, б – прижим с поршневым пневмоприводом. 50 Конструктивно клиновые механизмы выполняются: 1) с односкосым клином без роликов и с роликами. Они применяются в качестве усилителей пневмо- и гидроприводов. 2) многоклиновые самоцентрирующие механизмы, которые используются в конструкциях патронов и оправок. Определение силы зажима W. а) для механизма с трением на обеих поверхностях клина сила зажима W будет зависеть от известной силы привода Q: 1 W Q tg tg1 б) для механизма с трением только на наклонной плоскости, когда tg1 0 : W Q 1 tg а) б) Рис. Использование роликов в клиновых механизмах в) для клина с двумя роликами. В этом случае трение скольжение заменяется трением качения (Рис. -а): 1 W Q tg пр tg 1пр г) для клина с роликами только по наклонной плоскости (Рис. 1 W Q tg пр tg 1 -б): 51 Зажимные механизмы с плунжерами. Применяются с одним, двумя и большим числом плунжеров. Одно- и двухплунжерные обычно применяются в качестве усилителей привода; многоплунжерные – в качестве центрирующих механизмов патронов и оправок. Плунжер представляет собой промежуточную деталь нажимного действия (обычно цилиндрический валик), служащую для передачи усилия от одного элемента механизма к другому или воздействующего непосредственно на зажимаемую заготовку. ГОСТ 12483-67 устанавливает 3 исполнения конструкции плунжеров (рис. ). Материал плунжеров – сталь 45, твердость рабочих торцовых поверхностей – HRC 40…45. а б в Рис. Конструктивные исполнения плунжеров. а - с одним сферическим и вторым плоским торцом, б - с двумя сферическими торцами, в - с одним сферическим торцом и плоской головкой. Плоским торцом плунжер воспринимает давление (например создаваемое гидропластмассой), а сферическим торцом он воздействует на деталь или другой элемент приспособления. Для обеспечения упругого воздействия плунжера на деталь, ограниченного усилиями пружин применяются пустотелые плунжеры двух исполнений (рис. ) а б Рис. Пустотелые плунжеры а - с плоским и сферическим торцами, б - со сферическим торцом и плоской головкой 52 Эксцентриковые (кулачковые) зажимы. Рабочая часть этих зажимов выполнена в виде цилиндрических или криволинейных кулачковых валиков. Зажим с их помощью осуществляется быстрее, чем с помощью винтовых устройств, однако возможность их применения более ограничена по сравнению с винтовыми, т.к. они хорошо работают только при незначительных отклонениях размеров поверхностей, по которым обрабатываемые детали укрепляются и при отсутствии вибраций. Рис. Конструкции эксцентриков и кулачков применяемых в приспособлениях 1 – цилиндрический эксцентрик имеет широкое применение, т.к. прост в изготовлении. Недостатком такой конструкции является малый ход и непостоянство тормозящих свойств. 53 2 – отличается наличием среза для увеличения хода при установке и снятии обрабатываемой детали. 3 – имеет наибольшее применение на практике. Рабочая поверхность эксцентрика ограничивается сектором 60 - 90, остальное срезается. Такой кулачок целесообразно применять для отвода зажимного механизма при установке и снятии детали на значительные расстояния (до 45 мм). 4 – зажим представляет собой сдвоенный кулачок 3 и применяется в центрирующих механизмах и плавающих тисках. Все эти кулачки закрепляются на валу и при помощи рукоятки, прикрепленной к валу, вращаются вместе с ним. 5 – эксцентриковый рычаг, т.к. эксцентриковый кулачок в нем соединен с рукояткой. Диапазон их действия меньше, чем кулачков. 6 и 7 – эксцентриковые валики. Применяются в качестве запирающих механизмов для точно исполненных подвижных частей приспособлений. В этих случаях не требуется значительный эксцентриситет, а следовательно, можно применить валик малого диаметра. предпочтение следует отдавать двухопорным валикам 6, как более жестким и надежным против изгиба. 8 – торцовый кулачок. Применяется совместно с прихватами (рычагами) и плунжерами. Сила зажима заготовки: W QL tg1 tg где Q – сила на рукоятке; L – плечо приложения силы; и 1 - угол трения покоя ( 8) между эксцентриком и изделием и на оси эксцентрика соответственно; – расстояние от оси вращения эксцентрика до точки соприкосновения с изделием; - угол подъема кривой эксцентрика; Рабочая поверхность эксцентриков может выполняться в виде окружности и криволинейной – в виде эвольвенты и спирали Архимеда. Различие их в том, что в развертке круговых эксцентриков клин получается криволинейным с предельным углом , отсюда нестабильность зажима. В то же время технология изготовления круговых эксцентриков значительно проще, чем криволинейных. Самотормозящие свойства эксцентриков увеличиваются с увеличением угла поворота. Рекомендуемый угол поворота э = 30 - 135 Материал для эксцентриков – сталь 20Х с цементацией на глубину 0,8 – 1,2 мм и закалкой до HRC 55…60. 54 5. Рычажные механизмы. Рычаги используются в виде прихватов, прижимных планок в винтовых и эксцентриковых зажимах или в качестве усилителей. Применяются несколько схем использования прихватов: Рис. Применение рычажных механизмов для закрепления заготовки 1 схема: W Q l L где W – сила зажима заготовки; Q –сила, развиваемая винтом, эксцентриком или штоком пневмо- или гидропривода; - кпд, учитывающий потери на трение в опорах рычага (0,85 – 0,95). 2 схема: W Q l Ll W Q L Ll 3 схема: Как видно из формул для определения сил зажима 1 схема наименее эффективна, т.к. при ее использовании сила зажатия детали меньше, чем приложенная приводом сила Q. Третья схема наиболее эффективна, т.к. дает возможность увеличивать приложенную силу. Рычажно-шарнирные механизмы. Одной из разновидностей комбинированных механизмов являются рычажно-шарнирные. Чаще всего они используются в качестве усилителей в механизированных приводах. По конструкции делятся на однорычажные и двухрычажные одностороннего действия, а также двухрычажные двухстороннего действия (самоцентрирующие). Свойствами самоторможения эти механизмы не обладают. 55 В однорычажном механизме с роликом (рис. 55) зажим осуществляется зажимным рычагом-прихватом. Исходная сила Q при помощи рычага и прихвата преобразуется в зажимную силу W. Рис. 55. Однорычажный механизм Сила Q и реакция N со стороны опоры ролика заменяются равнодействующей R, направленной вдоль рычага. После разложения R на горизонтальную и вертикальную составляющие получим силы W и Q. Из треугольника сил для идеального механизма находим: Q Wид tg Видно, что при 0; Wид . Сила, развиваемая таким реальным механизмом определяется из формулы: 1 W Q tg tg 1пр где - дополнительный угол к углу наклона , который учитывает потери на трение скольжения в шарнирах (при f = 0,1, 1…2): d arcsin f ; l tg 1пр - приведенный коэффициент трения, которым учитываются потери на трение в роликовой опоре: d tg 1пр tg 1 ; D d – диаметр осей шарниров и внутренний диаметр ролика; D – наружный диаметр ролика; l – расстояние между осями отверстий рычага; f – коэффициент трения скольжения в шарнирах и на оси ролика; 56 tg1 - коэффициент трения скольжения на опоре ролика. При коэффициенте трения f = 0,1, угол незначитетелен: при d/D = 0,2 110' . а) б) Рис. 56 Двухрычажные механизмы. Двухрычажные механизмы одностороннего действия (Рис. 56-а). Для идеальных механизмов: Q Wид , 2tg т.е. эти механизмы при равных исходных силах развивают в 2 раза меньшее зажимное усилие, чем однорычажные. Для реального механизма: Q W 2tg Двухрычажные механизмы двухстороннего действия (Рис.56-б). Для идеальных механизмов: Q Wид , tg Для реального механизма: W Q tg 57 Пружинные механизмы. В станочных приспособлениях широкое применение получили винтовые цилиндрические пружины сжатия (рис. 57-а). Накопленная при сжатии потенциальная энергия используется для зажима обрабатываемых деталей. Кроме того, они используются в качестве возвратных пружин в пневмо- и гидроцилиндрах одностороннего действия, в регуляторах давления, клапанах, фиксаторах и т.п. а) б) Рис. 57. Цилиндрические пружины сжатия(а) и растяжения (б) и их механические характеристики. Несколько реже используются винтовые цилиндрические пружины растяжения (Рис. 57-б). Их используют преимущественно в качестве элементов, обеспечивающих возврат деталей зажимных механизмов в исходное положение. Рис. 58. Пружина кручения и ее характеристики. 58 Пружины кручения из круглой проволоки (Рис. 58). Пружины применяют в качестве прижимных аккумулирующих и упругих звеньев силовых передач Пружины винтовые цилиндрические изготавливают из холоднотянутой проволоки по ГОСТ 9389-75. Применяемые для изготовления пружин марки стали имеют ряд особенностей. Сталь 65Г по ГОСТ 14595-79 применяется для случаев когда поломка пружин не нарушает функционирования механизма и когда замена пружин не трудоемка. Это объясняется склонностью стали 65Г к образованию закалочных трещин. Сталь 60С2А по ГОСТ 14595-79 используется для пружин работающих в ответственных механизмах с циклическим и статическим нагружением при отсутствии соударения витков. Недостатком ее является низкая прокаливаемость при диаметрах более 20 мм и склонность к графитизации. Сталь 65С2ВА по ГОСТ 14595-79 служит лучшим материалом для пружин, работающих при высоких скоростях перемещений механизмов, возможных соударениях витков. Обладает высокими упругими свойствами, повышенной прокаливаемостью. Рис. 59. Пластинчатая пружина и ее характеристика Пластинчатые пружины (Рис. 59) применяют для незначительных линейных и угловых перемещений деталей конструируемых узлов. Материалом для изготовления пружин служит стальная холоднокатаная термообработанная лента (ГОСТ 21996-76). Ленту изготавливают из сталей 50, 60 по ГОСТ 1050-74, У7А, У8А, У9А, У10А, У12А по ГОСТ 1435 – 74 и 65 – 85, 60Г, 70Г, 60С3А, 70С2ХА по ГОСТ 14959 – 79. Тарельчатые пружины (Рис. 60). ГОСТ 3057-79 устанавливает два типа тарельчатых пружин: Н – нормальной точности, получаемые штамповкой без механической обработки обреза, П – повышенной точности, у которых поверхности получаемые после штамповки обрабатываются механически. Тарельчатые пружины имеют весьма малый ход при значительных усилиях деформирования, что позволяет сконструировать компактные узлы. 59 а) б) в) г) Рис. 60 Тарельчатые пружины. Для увеличения рабочего хода и получения необходимых механических характеристик тарельчатые пружины используют в виде пакетов с различной ориентацией в них отдельных пружин. Пакеты по рис. 60-б применяются в качестве аккумуляторов энергии зажимных механизмов приспособлений, буферных пружин амортизаторов. Пакеты по рис. 60-в применяются для гашения энергии ударов, воспринимаемых узлами механизмов. Пакеты, собранные по схеме, показанной на рис. 60-в работают при больших нагрузках (увеличение рабочей нагрузки примерно пропорциаонально числу пружин в пакете). На рис. 57 обозначены следующие параметры пружин: Р1 – начальная (предварительная) нагрузка пружины. Начальная нагрузка Р1 на пружину необходима для нормальной работы механизма, т.к. она обеспечивает выборку зазоров в сопряжениях. Р2 – конечная нагрузка при максимальной рабочей деформации. Р3 – предельная нагрузка, при которой пружина сжимается до соприкосновения витков, а напряжения почти достигают предела упругости. Р2 0,8 0,9Р3 Р1 0,1 0,5Р2 h H1 H 2 - рабочий ход пружины; Н0, Н1, Н2, Н3 – длина пружины в свободном состоянии, после приложения начальной, конечной и предельной нагрузок. 60 Жесткость пружины j, выражающая усилие (в Н или кгс), необходимое для сжатия (растяжения) пружины на 1 мм. P3 P P j 2 1 h H0 H3 Для цилиндрических винтовых пружин круглого сечения жесткость можно определить исходя из конструктивных параметров по формуле: Gd4 j 8Dcp n где Dcp – средний диаметр пружины в мм; d – диаметр проволоки, мм; n – число рабочих витков пружины; G – модуль сдвига, для стали G = 8000 кгс/мм2 Пружина для приспособления может быть выбрана по таблицам или на основании расчета. Расчет цилиндрических пружин сжатия сводится к определению диаметра d проволоки, среднего диаметра пружины, числа n рабочих витков. Пружины приближенно рассчитывают на кручение, считая, что нагрузка Р направлена вдоль оси пружины и вызывает в поперечном сечении проволоки крутящий момент: Dcp M P . 2 Величина наибольших касательных напряжений max в крайних точках сечения определяется по формуле: M max Wp где Wp – полярный момент сопротивления, для круглых сечений: Wp Тогда условие прочности будет: max d 3 16 8 P Dcp d 3 , отсюда находится максимальная (предельная) допускаемая нагрузка: d 3 . P3 8Dср По этой формуле, задаваясь нагрузкой Р3 можно найти диаметр пружины Dср если известен диаметр проволоки d, или d если известен диаметр пружины Dср. В случаях, когда d и Dcp определяются по конструктивным соображениям, по формуле определяется допускаемая рабочая нагрузка. 61 Комбинированные зажимы. Количество простых силовых механизмов ограничено, и все они в основе своей являются клиновыми или рычажными. Следовательно, комбинированные механизмы представляют собой систему из клиновых, рычажных или клино-рычажных механизмов. С помощью комбинированных механизмов можно: 1) увеличить силу зажима, 2) обеспечить самоторможение; 3) сделать возможным зажим заготовки в наиболее выгодном месте и направлении. Из двух или нескольких простых механизмов комбинируют один, например: винтовая пара – клин; винтовая пара – рычаг (Рис. 62-а, б, г, е); эксцентрик – клин; эксцентрик – рычаг(Рис. 61-в, д) Рис. 61. Примеры комбинированных зажимных механизмов. УСТАНОВОЧНО-ЗАЖИМНЫЕ МЕХАНИЗМЫ. В этих механизмах элемент, передающий заготовке усилие зажима, одновременно имеет и установочные функции. От установочных элементов требуется точность, а зажимные должны развивать определенную силу. Эти два требования совмещаются в одном механизме, но при движении под нагрузкой установочные элементы механизма изнашиваются и теряют точность. Поэтому эти механизмы требуют расчета на точность. Конструктивно УЗМ могут быть выполнены: I. В виде цельных центровых оправок с тугой посадкой детали отверстием (Рис. 28, 29, 31, 32). 62 II. В виде приспособления с одним подвижным установочно-зажимным элементом. На рис.62 представлена конструкция тисков, у которых подвижная губка является установочно-зажимным элементом, так как в ней имеется призматический паз, позволяющий центрировать деталь по горизонтальной оси. Деталь опорной плоскостью прижимается к приспособлению за счет поднутрения призмы на угол = 3…5. б1 0, б 2 0, б 3 0 Рис. 62 Установочно-зажимное приспособление. III. В виде приспособлений с самоцентрирующим зажимным устройством. Они позволяют производить установку заготовок по ее геометрической оси или по двум плоскостям симметрии. Самоцентрирующие зажимные устройства имеют 2 или 3 установочнозажимных элемента, которые связаны между собой так, что они могут одновременно и с равной скоростью сближаться друг с другом или удаляться, а после соприкосновения с поверхностью детали затягиваться до необходимого усилия Q. По конструкции различают следующие самоцентрирующие зажимные устройства: призматические, плунжерные, цанговые (рис. 31), гидропластмассовые (рис. 32), мембранные, с тарельчатыми пружинами, двух- и трехкулачковые патроны, рычажные. Призматические механизмы. Конструктивное исполнение – в виде тисков или токарного патрона. Зажим осуществляется от винта с двумя резьбовыми участками - с правой и левой резьбой. Упор служит для регулирования положения ползуна на винте. Упрощенная схема конструкции показана на рис. 63 63 Рис. 63. Самоустанавливающийся призматический зажимной механизм Плунжерные. Деталь закрепляется тремя плунжерами, расположенными через 120, которые перемещаются в пазах ползушки. кольцевая пружина круглого сечения прижимает плунжеры к пазам. Для коротких деталей используют один ряд плунжеров, для длинных – 2 ряда. бL 0; бD 0; W Q tg Рис. 64 Плунжерная разжимная оправка Мембранные патроны используются для точной центровки заготовок по наружной или внутренней цилинд-рической поверхности. Они состоят из круглой привернутой к планшайбе станка пластины (мембраны) 1 с симметрично расположенными выступамикулачками 2 (6 – 12 шт.). Внутри шпинделя проходит шток 3 пневмоцилиндра. Включая пневматическое устройство прогибают пластину и тем самым Рис. 65 Мембранный патрон (схема конструкции). раздвигают кулачки. 64 При отходе штока назад пластина, стремясь вернуться в исходное положение, сжимает своими кулачками заготовку 4. Материал мембраны – стали 65Г, 30ХГС или У7А, закаленные до твердости HRC 40…45. Мембранные патроны обеспечивают точность центрирования 0,003 – 0,005 мм. Кулачки могут быть выточены из одной заготовки с пластиной или изготовлены отдельно, а затем приварены к пластине. Окончательная обработка выполняется совместно. Q kM n f b Где k – коэффициент запаса; n– число кулачков; f – коэффициент трения между заготовкой и кулачками (0,15 – 0,18). b – плечо приложения силы Q. Кулачковые патроны. В данную группу входит значительное количество приспособлений, применяемых преимущественно на станках токарной и шлифовальной группы. Кулачковые патроны могут использоваться для установки и закрепления как симметричных деталей (тел вращения), так и деталей с несимметричными базовыми поверхностями. В первом случае используются трехкулачковые патроны, во втором – двух- или четырехкулачковые патроны с независимым перемещением кулачков или самоцентрирующие патроны с возможностью индивидуальной регулировки каждого их кулачков. а) б) Рис. 66. Самоцентрирующие токарные патроны. а – клиновой с компенсацией центробежных сил кулачков, б – рычажный поводковый 65 На рис. 66-а представлен патрон токарный самоцентрирующий клиновой, конструкции ЭНИМС, предназначенный для центрирования и закрепления заготовок на токарных станках при больших частотах вращения шпинделя. Патрон имеет компенсацию центробежных сил кулачков. Расположение грузов-компенсаторов 1, соединенных рычагом 3 с основными кулачками 4 в специальных углублениях корпуса 2, обеспечивает высокую жесткость патрона и точность обработки. На рис. 66-б показан трехкулачковый поводковый патрон с плавающим центром, предназначенный для установки заготовок в центрах и передачи крутящего момента. Патрон состоит из корпуса 1 с тремя двуплечевыми рычагами 2 и плавающим центром 5. Патрон позволяет повысить точность обработки за счет равномерного распределения усилия зажима между кулачками 3, что уменьшает радиальное биение и кривизну обработанных поверхностей относительно базовых – центровых гнезд. Наличие упора 4 обеспечивает базирование заготовки по торцу. Конструкция патрона обеспечивает возможность закрепления заготовок, имеющих значительные погрешности формы поверхности. Рис. 67. Патрон самоцентрирующий спирльно-реечный ГОСТ 2675-80. В крупносерийном производстве используются рычажные патроны с пневмоприводом. Наиболее распространены клиновые (ГОСТ16886-71) и рычажно-клиновые (ГОСТ 16862-71) патроны с механизированным приводом. В мелкосерийном, единичном и серийном производстве применяются патроны с ручным (ключевым) приводом спирально-реечные с плоской архимедовой спиралью и конической зубчатой передачей к спиральному диску (рис. 67). 66 МЕХАНИЗИРОВАННЫЕ ПРИВОДЫ ПРИСПОСОБЛЕНИЙ. Недостатком ручных приводов является большое время на закрепление и раскрепление заготовок, и значительные усилия. Механизированные зажимы устраняют эти недостатки. По принципу действия различают механизированные приводы следующих типов: 1. Пневматические. 2. Гидравлические (в т.ч. механо-гидравлические и пневмогидравлические). 3. Вакуумные. 4. Электромагнитные. 5. Центробежно-инерционные. 6. Электрические. 7. Приводы от сил резания и т.д. Пневматические приводы. Общая характеристика. Применяются в массовом, крупносерийном и серийном производствах. Реже используются в мелкосерийном. Для работы в пневмоприводах используют сжатый воздух Р = 4 – 6 кГ/см2 (0,4 – 1,0 МПа). Он должен быть очищен от влаги, механических примесей и кислот. Преимущества пневмоприводов: 1) Простота конструкции и эксплуатации. 2) Быстрота действия – 0,6 – 1,5 с. 3) Непрерывность действия зажимнного усилия. 4) Возможность регулирования силы зажима. Состоят пневмоприводы (рис. 68) из пневмодвигателя, пневматической аппаратуры и пневмосети, представляющей собой трубы, рукава, каналы и соединения. Рис. 68 Схема включения пневмопривода зажима приспособления в сеть. 1 – запорный вентиль, 2 – фильтр-влагоотделитель, 3 – редукционный клапан, 4 – манометр, 5 – масляный питатель, 6 – глушитель, 7 – распределительный кран, 8 пневмодивгатель 67 Классификация пневмодвигателей. В станочных приспособлениях наибольшее распространение получили объемные пневмодвигатели поршневого и диафрагменного (мембранного) типа. По методу компоновки с приспособлением различают пневмодвигатели встроенные, прикрепляемые и приставные. У встроенных двигаРис. 69 Встроенный пневмоцилиндр. телей рабочие полости и воздушные каналы формируются в корпусе приспособления, мембраны или диафрагмы также крепятся непосредственно к корпусу. Рис. 70 Варианты конструкции прикрепляемых пневмодвигателей. 68 Прикрепляемые пневмодвигатели монтируются на корпусе приспособления. Если приспособление больше не применяется в производстве, то двигатель отделяется от него и используется в другом приспособлении. По конструктивному исполнению различают стационарные, качающиеся (плавающие) и вращающиеся. Приставные двигатели полностью выделяются в самостоятельный агрегат и многократно используются в компоновках с различными приспособлениями. Рис. 71 Прикрепляемый мембранный пневмодвигатель Поршневые двигатели. Рис. 72 Поршневой пневмопривод одностороннего действия Приводы одностороннего действия. В пневмоцилиндре шток 5 вместе с поршнем 3 под действием воздуха, поступающего в полость А цилиндра 2 перемещается (рабочий ход), создавая силу Р, которая через промежуточные рычаги, кулачки, клинья и т.п. передается на зажимное устройство, закрепляющее обрабатываемую деталь. Для снятия зажимной силы с обрабатываемой поверхности поворачивают кран 1 в положение, при котором полость А сообщается с атмосферой. При этом воздух 69 выталкивается из цилиндра под действием возвратной пружины 4, перемещающей поршень со штоком в обратном направлении, освобождая обработанную деталь. Двигатели одностороннего действия рекомендуется применять, когда усилия при холостом ходе невелики. Эти двигатели не требуют уплотнения штока, вдвое уменьшается расход воздуха на цикл зажима. Недостаток их состоит в том, что при рабочем ходе часть усилия зажима затрачивается на сжатие пружины. Приводы двухстороннего действия. В цилиндре двухсто-роннего действия и рабочий и холостой ход осуществляются под действием сжатого воздуха. Воздух поочередно поступает в полость «А» пневмоцилиндра для закрепления обрабатываемой детали и в полость Б для ее освобождения. Эти двигатели применяются при большой длине хода, когда в приспособлении есть самотормозящие звенья, требующие значительных усилий при возвращении в исходное положение Рис. 73 Поршневой пневмопривод зажимных элементов. двухстороннего действия Уплотнения. Для нормальной работы пневмоцилиндров требуется герметичность и изоляция друг от друга его полостей. Для этого применяются уплотнения., которые соединяют между собой поршень и цилиндр, шток и крышку и неподвижные соединения (крышка и цилиндр). Основные требования к уплотнениям: Герметичность при всех рабочих режимах; Высокая износостойкость и минимальные потери на трение (в пределах 150 000 ходов поршня). Надежность работы при высоких и низких температурах и способность не разрушаться в результате химического взаимодействия с уплотняемой средой. Удобство монтажа, демонтажа и отсутствие необходимости подтяжки и регулировки при эксплуатации. Экономичность. В современных конструкциях пневмодвигателей применяются 2 типа уплотнений: 70 1. Манжеты V-образного сечения из маслостойкой резины для уплотнения поршней и штоков. 2. Кольца Круглого сечения из маслостойкой резины по ГОСТ 9833-73 для уплотнения поршней, штоков и неподвижных соединений. При сборке манжеты устанавливаются с натягом, т.е. D1 - наружный диаметр манжеты больше Dц – наружного диаметра цилиндра. При поступлении в цилиндр рабочей среды (сжатого воздуха или масла) она а) б) Рис. 74 Конструкции уплотнений в пневмоцилиндрах как клин распирает лепестки манжеты и автоматически уплотняет сопряжение движущихся частей. Кольца круглого сечения также уплотняются автоматически. Они закладываются в прямоугольные канавки, высота которых меньше диаметра d сечения кольца, а ширина b – больше, что необходимо для нормальной работы кольца. Кольца устанавливаются в канавку с натягом, обеспечивающим предварительное уплотнение. С поступлением в цилиндр рабочей среды кольцо перемещается к стенке канавки (в направлении потока воздуха или масла) и деформируясь принимает D-образную форму. Степень уплотнения возрастает с увеличением давления рабочей среды. В двигателях двухстороннего действия на поршне требуется две Vобразные манжеты, а кольцо круглого сечения – одно, т.к. последнее обеспечивает уплотнение в обе стороны. При уплотнении Vобразными манжетами требуются: посадка в сопряжении поршня с цилиндром: Н11 d11 или H 12 b12 , шероховатость обработки зеркала цилиндра Ra = 0.32 – 0.63 мкм, смазка умеренная. При уплотнении кольцами требуется посадка H 7 f 7 или H 9 f 9 , зеркало цилиндра следует обрабатывать по Ra = 0.16 – 0.08 мкм, смазка обильная. 71 Сила на штоке пневмоцилиндра. Для цилиндров одностороннего действия: D 2 Q p P1 4 где р – давление воздуха в цилиндре, D – диаметр цилиндра; - кпд привода (0,85 – 0,9) Р1 – сила сопротивления пружины. Параметры пружины рекомендуется выбирать с таким расчетом, чтобы при ее предельном сжатии она оказывала сопротивление от 5% до 20% от усилия на штоке в момент зажима. Для цилиндров двухстороннего действия: А) в полости без штока: D 2 Q p 4 Б) со стороны штока D2 d 2 Q p 4 При известных потребных усилиях зажима и давлении воздуха из этих формул можно определить диаметр цилиндра. После расчета диаметра его округляют до нормального и пересчитывают действительную силу на штоке Диафрагменные приводы. Могут быть одностороннего действия и двухсторннего, с тарельчатой или плоской диафрагмой. По методу компоновки с приспособлением делятся на прикрепляемые (стационарные и вращающиеся) и встроенные. Схема работы одностороннего диафрагменного привода с тарельчатой диафрагмой. Пневмокамера состоит из двух штампованных или литых чашек 1 и 2, между которыми зажата резинотканевая диафрагма 3. Диафрагму изготавливают из маслостойкой ткани пропитанной и покрытой с двух сторон маслостойкой резиной. Толщина диафрагмы – 4 – 10 мм. При подаче сжатого воздуха в полость А диафрагма оказывает давление на шайбу 4 штока 5 и перемещает его вниз. Обратный ход штока происходит под действием пружины 6. Угол выпуклости диафрагмы обычно = 45 для увеличения хода штока L = 2h (где h – стрела выпуклости). Корпус и крышку (изготавливают) льют из чугуна или алюминиевого сплава АЛ9В, АЛ10В или из пластмассы – волокнита. Ход плоской диафрагмы приблизительно в 2 раза меньше, чем тарельчатой. В этом случае возврат диафрагмы осуществляется за счет воздуха. Плоские мембраны вырезают из резины с тканевой прокладкой. 72 1. 2. 3. 4. 5. 6. Преимущества диафрагменных приводов: Простота герметизации рабочей полости. Меньшая трудоемкость изготовления. Меньшие размеры и вес. Высокая долговечность простота ремонта. Ресурс от 6000 до 1 млн. включений. Нечувствительность к качеству воздуха. Не требует смазки. Недостатки: 1. Относительно малый ход штока (до 30 мм). 2. Непостоянство усилия на штоке. Рис. 75 Схема конструкции мембранного пневмодвигателя 1 и 2 – чашки (крышки), 3 – мембрана (диафрагма), 4 – опорная шайба, 5 - шток Определение силы на штоке диафрагменного привода. Усилие на штоке изменяется по мере его движения, т.к. на определенном участке перемещения начинает оказывать сопротивление мембрана. В любом месте хода усилие Q можно определить по графикам зависимости усилия от хода, составляемым для каждого двигателя, с учетом диаметра, толщины и материала мембраны. Диаметр d опорных шайб (дисков) рекомендуется определять в зависимости от D – диаметра диафрагмы «в свету» и толщины диафрагмы t. - для резинотканевых: d 0.7D ; - для резиновых: d D 2t 2 4 . Приблизительно расчет усилие Q на штоке пневмодвигателя одностороннего действия определяется: Для тарельчатых и плоских мембран из прорезиненой ткани: 1) в исходном положении штока: Q 16 D d 2 p P1 73 2) в положении после перемещения на расстояние 0,3D для тарельчатых и 0.07D для плоских мембран: 0,75 D d 2 p P1 Q 16 Для плоских резиновых мембран. 1) В исходном положении: Q 4 d 2 p P1 2) В положении, после перемещения на 0,22D: 0.9 2 Q d p P1 4 где D – диаметр диафрагмы «в свету»; d – диаметр шайбы; р – давление сжатого воздуха кгс/см2; Р1 – усилие возвратной пружины, кгс. Гидравлические силовые приводы. Применяются эти приводы в серийном, крупносерийном и массовом производстве. Гидроприводы уступают пневматическим приводам в быстроте действия, но имеют свои преимущества: 1) Малые диаметры цилиндров (до 60 мм), что обеспечивается высоким давлением в системе ( 60 кгс/см2). 2) Силовые приводы и аппаратура не нуждаются в особой смазке, т.к. рабочая среда – масло (индустриальное – И20, И30, масло для гидроприводов – ИГП-18). 3) Простота кинематики зажимного устройства. Т.к. во многих случаях отсутствуют дополнительные усилители. 4) Отсутствуют неполадки, связанные с конденсацией водяных паров. 5) Обеспечивают возможность закрепления большего числа заготовок и надежность зажима. Недостатки: Необходимость иметь гидростанцию (нагнетательный насос и аппаратуру). В связи с этим эффективно применение гидропривода в приспособлениях, предназначенных для гидрофицированных станков. Гидравлические зажимные устройства выполняются поршневого типа и приводятся в движение от отдельного насоса или пневмогидропреобразователя. Гидроцилиндры могут быть одностороннего и двухстороннего действия. Примеры использования гидроцилиндров в различных компоновках станочных приспособлений показаны на рис. 76. 74 Рис. 76. Применение гидроцилиндров в станочных приспособлениях а – одностороннего действия со сплошным штоком, б – одностроннего действия с полым штоком, в – двухстороннего действия, двухстороннего действия укороченный. Рис. 77. Схема гидропривода с шестеренчатым насосом и шиберным гидродвигателем 1 - бак; 2 - насос; 3 - поршень; 4 золотник; 5 - рукоятка; 6 - манометр; 7, 13, 14 трубопроводы; 8 - лопастной насос; 9 - ротор; 10 - упор; 11 - маслопровод; 12 - клапан На рис. 77. изображена схема гидравлического зажима с шиберным двигателем двойного действия. Питание системы осуществляется шестеренчатым насосом 2, который подает масло через золотник ручного управления в левую (поворот по часовой стрелке) и правую (поворот против часовой стрелки) полости цилиндра. После окончания зажима масло сбрасывается через предохранительный клапан 4, отрегулированный на требуемое давление. Помимо насосных установок с электроприводом вращения насоса для закрепления заготовок применяют также ручные насосы: рычажные (рис. 78) и винтовые (рис. 79). 75 Рис. 78. Зажимной механизм с ручным рычажным насосом. В зажимных устройствах одностороннего действия обратный ход поршня осуществляется пружиной. Золотники ручного или педального управления имеют два положения, соответствующие зажиму и откреплению заготовки. Уплотнение поршней и штоков гидроцилиндров достигается применением одного-двух колец круглого сечения из маслостойкой резины. Рис. 79 Ручные винтовые насосы для зажима деталей на станке. В качестве источников давления широкое распространение получили пневмогидравлические преобразователи. Пример такого механизма показан на рис. 80. В этой конструкции поршень гидроцилиндра высокого давления подвижно связанный с корпусом пневмоцилиндра находится под действием пакета тарельчатых пружин. Кроме того, гидроцилиндр снабжен храповым запорным устройством, препятствующим его 76 обратному ходу при падении давления сжатого воздуха, что исключает раскрепление заготовок. В зависимости от направления перемещения штока с поршнем гидроцилиндры бывают тянущие и толкающие. В зависимости от вида обслуживаемого приспособления гидроцилиндры бывают неподвижными и вращающимися. Размеры всех деталей, входящих в гидроцилиндры Рис. 80 Пневмогидропреобразователь с нормализованы. Цилиндры пружинным энергоаккумулятором одностороннего действия изготавливают из стали 40Х, а цилиндры двухстороннего действия – из холодно-катанных бесшовных труб. Диаметр поршня гидроцилиндра приближенно может быть определен по формуле: D 1.13 Q , см. p Производительность насоса (см3/с): V QL p t Время срабатывания гидроцилиндра: t D 2 L 4 10 3 V где D – внутренний диаметр гидроцилиндра, см; L – длина хода поршня, см; t – время рабочего хода поршня; V – производительность насоса; = 0,85 – объемный кпд гидросистемы, учитывающий утечки масла в гидроцилиндре и золотниках. р – давление масла в гидроцилиндре (60 кгс/см2). 77 Магнитные и электромагнитные зажимные устройства . Магнитный привод – устройство для создания и подведения к рабочему зазору магнитного потока с целью использования его энергии для совершения механической работы, например при закреплении заготовки). Источниками магнитного поля Рис. 81 Принцип работы магнитного зажима. могут быть электро1 – деталь, 2 - установочный элемент приспособления, магнитные катушки и 3 – немагнтитная вставка, 4 – постоянный магнит постоянные магниты. Основной характеристикой магнитных свойств материала является магнитная проницаемость . В зависимости от значения различают немагнитные материалы ( 0, 0 – магнитная проницаемость воздуха) и магнитные ( > 0). Зависимость магнитной индукции В от напряженности магнитного поля Н имеет нелинейный характер и называется кривой намагничивания (рис. , кривая 1) и кривой размагничивания (рис. , кривая 2). В зависимости от формы кривых намагничивания и размагничивания различают магнитомягкие материалы (коэрцитивная сила Нс < 10 А/м) и магнитотвердые материалы (коэрцитивная сила Нс > 40 А/м). Немагнитные материалы в приспособлениях используют для увеличения магнитного сопротивления определенных участков пути прохождения магнитного потока (потоков утечки). Магнитомягкие материалы используют для изготовления магнитопроводов с минимальным магнитным сопротивлением или сердечников электромагнитных катушек (применяются стали Ст0, Ст1, Ст2, Ст3 по ГОСТ 380-71, Сталь 08, 10, 20 по ГОСТ 1050-74 или электротехническая сталь марок 10895, 10880 20864 и т.п. по ГОСТ 11036-75). Магнитотвердые материалы, применяемые в качестве источников магнитного поля в приспособлениях с постоянными магнитами, выбираются из следующих групп (литые магнитные материалы марок ЮН14ДК24, ЮН13ДК24, магнитотвердые ферриты марок 18БА220, 22БА220 и спеченные из порошков магниты марок КС37, КС37А). Приспособления с магнитным приводом могут использоваться в качестве установочно-зажимных, грузозахватных, приспособлений для сварочных работ и т.п. Для управления зажимом в приспособлениях используются механические устройства (например подвижный блок магнитов – рис. 82). 78 При выключенном зажиме магниты подвижного и неподвижного блоков расположены так, что магнитный поток от полюсов магнитов 1 и 2 замыкается через вставки 4, поэтому на деталь не действует сила притяжения Qмагн. При смещении подвижного блока 1 вправо полюса магнитов занимают такое положение, что замыкание магнитного потока возможно только через закрепляемую деталь, в результате чего она и фиксируется. Рис. 82. Принцип действия выключаемого зажима с постоянными магнитами 1 – подвижные магниты, 2 – неподвижные магниты, 3 – деталь, 4 – вставки из магнитомягкого материала, 5, 6 – вставки из немагнитного материала Другой способ управления зажимом – использование электромагнитной катушки (рис. 83). При отключенной катушке 2 магнитный поток Фмагн от магнита 3 через металлические вставки 2 замыкается через деталь. При включении катушки в магнитопроводах наводится поток Фкат направленный противоположно Фмагн, это позволяет снять деталь с приспособления с минимальным усилием. Рис. 83. Управление магнитным зажимом с помощью катушки. 1 – катушка, 2 – магнитопроводы, 3 – постоянный магнит, 4 заготовка 79 УСТРОЙСТВА, КООРДИНИРУЮЩИЕ ПОЛОЖЕНИЕ РЕЖУЩЕГО ИНСТРУМЕНТА. Кондукторные втулки для сверлильных и расточных станков. Кондукторные втулки (рис. 84) служат для направления режущего инструмента при обработке отверстий на сверлильных и расточных станках и устанавливаются в кондукторные плиты. Рис. 84. Кондукторные втулки, применяемые в приспособлениях: а - постоянные без буртика; б - постоянные с буртиком; в - сменные с буртиком; г быстросменные (1 - буртик; 2 - постоянная втулка; 3 - корпус; 4 - деталь; 5 - винт); д специальная для сверления отверстия в углублении (1 - втулка; 2 - деталь); е - для сверления отверстий на цилиндрической поверхности (1 - кондукторская втулка; 2 - деталь). Постоянные втулки без бурта (ГОСТ 18429-73) и с буртом (ГОСТ 18430-73). Применяются при обработке неточных отверстий одним инструментом (сверлом или зенкером) в условиях мелкосерийного производства. Они запрессовываются в кондукторную плиту по посадке H7 . n6 Сменные втулки. Применяются при обработке отверстия одним инструментом в условиях крупносерийного и массового производства, когда они изнашиваются и необходима их замена. Они устанавливаются в промежуточные втулки по посадке Н 7 h6 . От проворачиванния и подъема при обработке (под действием сходящей стружки) сменные втулки крепятся головкой винта. Быстросменные втулки. Используются в случаях, когда точное отверстие получается путем последовательного применения нескольких инструментов, для каждого из которых требуется своя втулка (например) сверло, зенкер, развертка и т.п. 80 Быстросменные втулки устанавливаются в промежуточных втулках по посадке H 7 g 6 или H 7 g 5 . В такой конструкции не надо вращать винт для смены втулки. Он препятствует осевому смещению втулки. Промежуточные втулки. Служат для установки сменных или быстросменных втулок в приспособлениях. Они монтируются в корпусах или кондукторных плитах по посадке H 7 n6 . Допуски на диаметр отверстия для прохода сверл и зенкеров устанавливаются по посадке F 8 h6 , а для разверток - G 7 h6 . Применение кондукторных втулок устраняет операцию разметки, уменьшает увод сверла и разбивку обрабатываемых отверстий, точность которых заметно увеличивается по сравнению с обработкой без кондуктора. Расстояние h от нижнего торца кондукторной втулки до поверхности обрабатываемой детали принимается равным (1/3 - 1)d, где d – диаметр отверстия втулки под инструмент. При обработке хрупких материалов (чугун, бронза) выбирается минимальное расстояние, а при обработке вязких (стали и пр.) максимальное. Для зенкерования h 0.3d . От величины h зависит и положение просверленного отверстия. В качестве материалов при изготовлении кондукторных втулок применяются: - сталь 9ХС для d 9 мм. - сталь У10 для d = 9 – 27 мм. - сталь 20Х для d > 27 мм (с цементацией h = 0.6 – 1 мм, НRC 60). Ориентировочно количество сверлений через кондукторную втулку принимают равным 10 000 – 15 000. Допуски на изготовление и износ кондукторных втулок по внутренней поверхности (мкм) принимаются по таблице 3: Таблица 3. Допуски на изготовление кондукторных втулок Допуск, мкм Номинальный диаметр сверла, мм 1–3 3–6 6 – 10 10 – 18 18 – 30 30 – 50 50 - 80 Изготовления 14 17 20 24 30 35 40 Износа 10 15 20 25 30 35 40 При конструировании кондукторов необходимо указывать на чертежах допуски (отклонения) на расстояния между осями втулок и до установочных элементов. На практике допуски на координирующие размеры назначают в 2 – 3 раза меньше соответствующих размеров по чертежу детали или выбирают по следующим рекомендациям: 81 - в кондукторах для обработки сквозных отверстий под болты, неточных отверстий под резьбу допуски на координирующие размеры брать в пределах от 0,05 – 0,1 мм. - в кондукторах, где требуется обработка отверстий высокой точности, например, под подшипники валов, осей и т.п., а также для обработки отверстий многошпиндельными головками допуски на координирующие размеры уменьшаются до 0,02 мм. Вращающиеся кондукторные втулки. Применяются для направления длинных борштанг у сверлильных и расточных станков с целью повышения точности обработки (рис.. Нормализованные втулки состоят из двух втулок, между которыми помещен сепаратор с иглами, по которым происходит вращение. Рис. 85 Вращающаяся кондукторная втулка Кондукторные плиты. Служат для установки в них кондукторных втулок (Рис. 86). Плиты изготавливают из высококачественного чугуна, реже из стали. Толщина плит согласуется с высотой кондукторных втулок и обычно колеблется в пределах от 15 до 30 мм. При использовании высоких втулок на плитах предусматривают местные утолщения (бобышки). В зависимости от связи с корпусом кондуктора плиты могут быть откидными, съемными, подвесными, подъемными. Жесткие плиты отливают за одно целое с корпусом или прикрепляются к нему сваркой, а чаще при помощи винтов с фиксацией контрольными штифтами. Откидные или шарнирные плиты позволяют открывать кондуктор для установки и снятия обрабатываемых деталей. Съемные или накладные кондукторные плиты обычно используются для обработки систем отверстий в крупных деталях на радиально- 82 сверлильных станках. Они накладываются непосредственно на деталь и после необходимой ориентации прикрепляются к ней. Подвесные плиты применяют при сверлении многошпиндельными головками. Плита вместе с головкой подвешивается на шпиндель станка и направляющими колонками связывается с корпусом приспособления. Под плитой располагаются пружины, которые при закреплении сжимаются, а при ходе вверх поднимают кондукторную плиту. Подъемные плиты устанавливаются на уступах колонок скальчатых кондукторов и с помощью рукоятки или пневмопривода и реечной передачи поднимаются и опускаются, осуществляя одновременно и зажим детали. Рис. 86 Конструкции кондукторных плит а – жесткие, отлитые за одно целое с корпусом, б – жесткие, привинченные к корпусу, в – жесткие, сваренные с корпусом, г – откидные, д – съемные, е – подвесные, ж – подъемные. 83 Установы или габариты. Для установки (наладки) положения стола станка вместе с приспособлением относительно режущего инструмента применяются специальные шаблоны-установы, выполненные в виде различных по форме пластин, призм и угольников. Установы закрепляются на корпусе приспособления; их эталонные поверхности должны быть расположены ниже обрабатываемых поверхностей заготовки, чтобы не мешать проходу режущего инструмента. Чаще всего установы применяют при обработке на фрезерных станках, настроенных на автоматическое получение размеров заданной точности. Рис. 87 Установы, используемые для наладки фрезерных станков: а - установ для наладки фрез на размер (1 - установ); б - для установки фрезы в одном направлении; в - для установки фрезы в двух направлениях. Различают высотные и угловые установы. Первые служат для правильного расположения детали относительно фрезы по высоте, вторые – и по высоте и в боковом направлении. Изготовляются из стали 20Х, с цементацией на глубину 0,8 – 1,2 мм с последующей закалкой до твердости HRC 55…60 ед. Рис. 88. Шаблоны для токарных и фрезерных станков: а - для установки резцов на токарном станке (1 - шаблон); б - для установки резца на токарном станке (1 - установочное кольцо; 2 - обрабатываемая деталь); в - для установки фрезы в двух направлениях (1 - угольник; 2 - шаблон; 3 - фреза). 84 Копиры. Копиры применяются для обработки фасонных поверхностей на станках общего назначения. Копиры предназначены для получения траектории относительного движения инструмента, при обработке фасонного профиля. Виды копиров: 1) Для токарных станков (круглые и плоские): 2) Для фрезерных, строгальных и шлифовальных (обработка методом круговой подачи). Рис. 89 Схема копировального устройства при работе по копиру 1 - заготовка; 2 - копир; 3 - ролик. При помощи копиров деталь и инструмент получает дополнительное движение подачи, необходимое для образования фасонной поверхности. Дополнительная подача может осуществляться: - следящими устройствами (гидравлическими и электрическими); - механическими устройствами. Материал для изготовления копиров: сталь 20Х, с цементацией и закалкой до HRC 50…55. Для компенсации изменения диаметра фрезы после переточек ролик делается коническим с углом между образующей и осью ролика 10 - 15. 85 СПИСОК ЛИТЕРАТУРЫ: 1. Ансеров М.А. Приспособления для металлорежущих станков. Л.:Машиностроение, 1975 – 656 с. 2. Белоусов А.П. Проектирование станочных приспособлений. М.: Высшая школа, 1974. – 263 с. 3. Белоусов А.П. Проектирование приспособлений. М.:Машиностроение, 1964 г. – 187 с. 4. Горохов В.А. Проектирование и расчет приспособлений. Минск: Вышейшая школа, 1986. – 238 с. 5. Горошкин А.К. Приспособления для металлорежущих станков. Справочник – М.:Машиностроение, 1979 –304 с. 6. Владимиров В.М. Изготовление штампов, пресс-форм и приспособлений: учебник. – М.:Высш. школа, 1981. – 431 с. 7. В.П. Фираго Основы проектирования технологических процессов и приспособлений. Методы обработки поверхностей – М.: Машиностроение, 1973. – 468 с. 8. Орлов П.И. Основы конструирования: Справочно-методическое пособие. В 2-х кн.Кн. 1/ Под ред. П.Н. Учаева. – Изд. 3-е, испр. – М.:Машиностроение, 1988. – 560 с. 9. Орлов П.И. Основы конструирования: Справочно-методическое пособие. В 2-х кн.Кн. 2/ Под ред. П.Н. Учаева. – Изд. 3-е, испр. – М.:Машиностроение, 1988. – 544 с. 10. Альбом по проектированию приспособлений: учеб. пособие для студентов маш. спец. вузов. / Б.М. Базров и др. – М.:Машиностроение, 1991 – 121 с. 11. Станочные приспособления: Справочник. В 2-х т. /Ред. совет: Б.Н. Вардашкин(пред.) и др. – М.:Машиностроение, 1984. – Т.1/Под ред. Б.Н. Вардашкина, А.А. Шатилова, 1984. – 592 с. 12. Станочные приспособления: Справочник. В 2-х т. /Ред. совет: Б.Н. Вардашкин(пред.) и др. – М.:Машиностроение, 1984. – Т.2/Под ред. Б.Н. Вардашкина, В.В. Данилевского, 1984. – 656 с. 13. Шапошник Р.К. Расчет и проектирование приспособлений. учеб. пособие. – Саратов: Сарат. политехн. ин-т, 1993 – 71 с. 14. Насыров Ш.Г. Технологическая оснастка: Методические указания к практикуму.– Оренбург: ГОУ ОГУ, 2003. – 52 с. 15. Гурьянихин В.Ф. Технологическая оснастка: учебное пособие / В. Ф. Гурьянихин, А.Д. Евстигнеев - Ульяновск: УлГТУ, 2006. – 80 с. 16. Ванин В.А. Приспособления для металлорежущих станков: учеб. пособие / В.А. Ванин, А.Н. Преображенский, В.Х. Фидаров. – Тамбов: Изд. Тамб. гос техн. унта, 2007. – 179 с. 86 ПРОЕКТИРОВАНИЕ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКИ Учебное пособие для студентов специальности 151001.65 «Технология машиностроения» Составил: СТЕКОЛЬНИКОВ Максим Владимирович Рецензенты: кафедра «Технологии сельскохозяйственного машиностроения» СГАУд.т.н. Редактор: Лицензия Подписано в печать Бум. тип. Усл.-печ.л. Формат 6084 1/16 Тираж 100 экз. Заказ Бесплатно Саратовский государственный технический университет 410054 г. Саратов, ул. Политехническая, 77 Копипринтер СГТУ, 410054 г. Саратов, ул. Политехническая, 77 87