Лекция 8 Сходимость квадратурных процессов
advertisement

Министерство образования Республики Беларусь
Учреждение образования
«Гомельский государственный университет
имени Франциска Скорины»
Е.М. БЕРЕЗОВСКАЯ
МЕТОДЫ ЧИСЛЕННОГО АНАЛИЗА
ТЕКСТЫ ЛЕКЦИЙ
для студентов специальности
1-31 03 06 «Экономическая кибернетика»
В 2-х частях
Часть 1
ИНТЕРПОЛЯЦИЯ И ИНТЕГРИРОВАНИЕ
Гомель 2007
УДК 519.6 (075.8)
ББК 22.19я73
Б 484
Рецензенты:
С.П.Новиков, зав. кафедрой высшей математики учреждения
образования «Белорусский государственный университет
транспорта», доцент, к.ф.-м.н.
В.И.Мироненко, зав. кафедрой дифференциальных уравнений
учреждения образования «Гомельский государственный университет имени Франциска Скорины», профессор, к.ф.-м.н.
Рекомендованы к изданию научно-методическим советом учреждения образования «Гомельский государственный университет имени
Франциска Скорины»
Б 484
Березовская, Е.М.
Методы численного анализа: тексты лекций для студентов вузов специальности 1-31 03 06 «Экономическая кибернетика»: в 2 ч. Ч.1. Интерполяция и интегрирование /
Е.М. Березовская; М-во образования РБ, Гомельский гос.
ун-т им. Ф. Скорины. – Гомель: ГГУ им. Ф.Скорины, 2007.
– 131с.
Тексты лекций ставят своей целью оказание помощи студентам в
овладении базовых знаний по различным аспектам методов численного
анализа. Излагается теоретический материал по вопросам приближения функций, приближенному вычислению интегралов и численному
решения интегральных уравнений.
Адресованы студентам специальности 1-31 03 06 «Экономическая
кибернетика».
УДК 519.6 (075.8)
ББК 22.19я73
© Березовская Е.М., 2007
© УО «ГГУ им. Ф. Скорины», 2007
2
СОДЕРЖАНИЕ
ВВЕДЕНИЕ .................................................................................................. 4
Тема 1 ИНТЕРПОЛИРОВАНИЕ ФУНКЦИЙ ........................................... 5
Лекция 1 Интерполирование с равноотстоящими узлами .................. 5
Лекция 2 Интерполяционные формулы Ньютона ................................ 9
Лекция 3 Интерполирование внутри таблицы ................................... 13
Лекция 4 Интерполирование функций для неравноотстоящих
узлов ....................................................................................................... 18
Лекция 5 Интерполяционные формулы Ньютона для неравноотстоящих узлов ............................................................................................... 24
Лекция 6 Обратное интерполирование ............................................... 29
Лекция 7 Интерполирование функций многих переменных ............ 32
Лекция 8 Сходимость интерполяционного процесса ........................ 34
Тема 2 ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ ................................. 38
Тема 3 ПРИБЛИЖЕНИЕ ФУНКЦИЙ СПЛАЙНАМИ ........................... 43
Лекция 1 Кубические сплайны ............................................................ 43
Лекция 2 Способы задания кубических сплайнов ............................. 48
Тема 4 СРЕДНЕКВАДРАТИЧНЫЕ ПРИБЛИЖЕНИЯ .......................... 52
Лекция 1 Точечная квадратичная аппроксимация функций ............. 52
Лекция 2 Метод ортогональных полиномов ...................................... 55
Лекция 3 Метод наименьших квадратов............................................. 61
Тема 5 ПРИБЛИЖЕННОЕ ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ ................ 65
Лекция 1 Интерполяционные квадратурные правила ....................... 65
Лекция 2 Квадратурные формулы для равноотстоящих узлов ......... 69
Лекция 3 Квадратурные формулы наивысшей алгебраической степени точности ............................................................................................ 79
Лекция 4 Коэффициенты формул Гаусса. .......................................... 85
Лекция 5 Вычисление несобственных интегралов. ........................... 92
Лекция 6 Вычисление кратных интегралов. ....................................... 95
Лекция 7 Вероятностный метод .......................................................... 98
Лекция 8 Сходимость квадратурных процессов .............................. 105
Тема 6 ЧИСЛЕННОЕ РЕШЕНИЕ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 111
Лекция 1 Метод последовательных приближений. ......................... 111
Лекция 2 Решение интегральных уравнений .................................... 116
Лекция 3 Решение интегральных уравнений Фредгольма .............. 124
ЛИТЕРАТУРА ......................................................................................... 130
3
ВВЕДЕНИЕ
Изучение курса «Методы численного анализа» предусмотрено образовательным стандартом и учебным планом подготовки специалистов специальности 1-31 03 06 «Экономическая кибернетика». Данная
дисциплина входит в цикл общепрофессиональных и специальных
дисциплин указанной специальности.
Характерной особенностью современного этапа развития экономики следует считать резкое повышение требований к квалификации работников производства и управления, а также «виртуализацию» так
называемого социального заказа на подготовку экономистовкибернетиков агропромышленного комплекса. Содержание образовательного процесса в вузах достаточно жестко определяется государственными образовательными стандартами высшего профессионального образования, которые предусматривают выпуск конкурентно способных на рынке труда специалистов. Последние должны формировать
у себя прочные теоретические и практические навыки самообразования, что возможно в современных условиях только при наличии должного уровня информационной культуры.
Тексты лекций по курсу «Методы численного анализа» направлены на формирование теоретической и практической углубленной подготовки студентов по специализации в области применения численных
методов. Изучение курса базируется на дисциплинах: «Вычислительные методы алгебры», «Функциональный анализ и интегральные уравнения», «Теория алгоритмов», «ЭВМ и программирование», «Программное обеспечение ЭВМ», «Математический анализ».
4
Тема 1 ИНТЕРПОЛИРОВАНИЕ ФУНКЦИЙ
Лекция 1 Интерполирование с равноотстоящими узлами
1 Постановка задачи интерполирования.
2 Примеры интерполяционных функций.
3 Конечные разности и их свойства.
1 Постановка задачи интерполирования
Рассмотрим на отрезке [a, b] некоторую m – кратно дифференцируемую функцию f (x) . Пусть в k 0 точках x01 , x02 , x03 ,...,x0k0 известны ее значения
f ( x01 ), f ( x02 ), f ( x03 ),..., f ( x0k0 ) , в k 1 точках
x11 , x12 , x13 ,...,x1k1
известны
f
(1)
( x11 ), f
(1)
( x12 ),..., f
производной f
( m)
(1)
значения
первой
производной
( x1k1 ) и в k m точках известны значения m –ой
( x m1 ), f
( m)
( x m 2 ),..., f
( m)
( x mkm ) . Значения функции и
ее производных называются данными интерполирования, а точки xij
– узлами интерполирования.
Задача интерполирования заключается в отыскании функции
(x) из некоторого класса такой, что выполняется условие
(i ) ( xij ) f (i ) ( xij ), i 1,2,..., m, j 1,2,..., k i .
(1.1)
Пусть n k 0 k1 ... k m . Рассмотрим на отрезке [a, b] последовательность линейно независимых m – кратно дифференцируемых функций: 1 ( x), 2 ( x),..., n ( x) . В качестве семейства возьмем всевозможные линейные комбинации первых n функций с произвольными
коэффициентами
( x) a11 ( x) a22 ( x) ... ann ( x) .
Из условия (1.1) получим систему линейных алгебраических уравнений для определения коэффициентов ai , i 1,2,..., n
a11(i ) ( xij ) a 2 2(i ) ( xij ) ... a n n(i ) ( xij ) f (i ) ( xij ) .
(1.2)
Система (1.2) будет иметь единственное решение в том случае, если ее
определитель отличен от нуля.
5
2 Примеры интерполяционных функций
Приведем примеры интерполяционных функций.
1. Рассмотрим следующую систему линейно независимых функций: 1, x, x 2 , x3 , ..., x n , ... . Тогда семейством является совокупность
алгебраических многочленов вида
Pn ( x) a0 x n a1 x n1 a2 x n2 ... an1 x an .
(1.3)
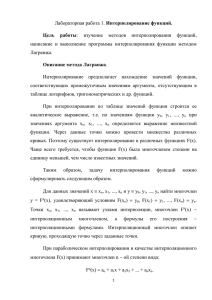
Геометрически это означает, что нужно найти алгебраическую
кривую
проходящую
через
систему
точек
y Pn (x) ,
M i ( xi , yi ) (i 1,2,...., n) (Рис. 1.1).
Мn
У
Y=P n(x)
Y=f(x)
М1
М2
М0
Х
0
Х0
Х1
Х2
Хn
Рис.1.1 Интерполяционный многочлен
Система уравнений, из которой определяются коэффициенты ai из
(1.3), будет
Pn ( xi ) a 0 xi n a1 xi n 1 a 2 xi n 2 ... a n 1 xi a n f ( xi ) .
(1.4)
Ее определитель является определителем Вандермонда, и он отличен
от нуля для различных между собой значениях x i .
Интерполирование полиномами вида (1.3) называется алгебраическим.
2. Для интерполирования периодических функций с периодом 2
применяется
система
тригонометрических
функций:
1, cos x, sin x, cos 2 x, sin 2 x, cos 3x, sin 3x, ... . Линейная комбинация пер-
6
вых 2n 1 функций является тригонометрическим многочленом степени n
n
n ( x) a0 (a k cos kx bk sin kx) .
(1.5)
k 1
Интерполирование с помощью полиномов (1.5) называется тригонометрическим.
Пусть для функции f (x) построена интерполирующая функция
(x) . Тогда, если определяется значение f (x) в точке x , лежащей
внутри отрезка [a, b] интерполирования, то такое восстановление
функции называется интерполяцией. Если же точка x лежит вне отрезка [a, b] , то такое восстановление функции называется экстраполяцией.
3 Конечные разности и их свойства
Конечные разности в вычислительной математике имеют значение,
аналогичное дифференциалам в анализе бесконечно малых величин.
Пусть
даны
равноотстоящие
друг
от
друга
узлы
xk x0 kh (k 0,1,2,...) и известны соответствующие значения
функции y k f ( xk ) f ( x0 kh) . Здесь h x xk xk 1 – некоторое
фиксированное значение аргумента.
Конечными разностями нулевого порядка называются величины
y k равные значениям функции f ( xk ) в узлах x k . Конечными разностями первого порядка называются величины
y0 y1 y0 f ( x0 h) f ( x0 ),
y1 y2 y1 ,
y2 y3 y2 , ... , yk yk 1 yk .
(1.6)
Конечные разности второго порядка определяются равенствами по
отношению к разностям первого порядка
2 y0 y1 y0 , 2 y1 y2 y1 , ... ,
2 yk yk 1 yk yk 2 2 yk 1 yk .
Разности n-го порядка определяются по формуле
n yk n 1 yk 1 n 1 yk , k 0,1,2, ... .
7
(1.7)
Конечные разности любого порядка легко выражаются через значения функции
n y0 yn
n
n
n(n 1)
yn 1
yn 2 ... (1) n y0 (1) i Cni yn i . (1.8)
1!
2!
i 0
Доказательство проведем по индукции. Пусть эта формула верна
для n k . Покажем, что она будет верна и при n k 1 .
k
k
k 1 y 0 k y1 k y 0 (1) i C ki y k i 1 (1) i C ki y k i
i 0
i 0
k
k 1
k 1
i 0
i 1
i 0
(1) i C ki y k i 1 (1) i C ki 1 y k i 1 (1) i (C ki C ki 1 ) y k i 1
k 1
(1) i (
i 0
k 1
k!
k!
) y k i 1
i! (k i )! (i 1)! (k i 1)!
(1) i (
i 0
k 1
(1) i
i 0
k!
(k i 1 i)) y k 1i
i! (k 1 i )!
k 1
(k 1)!
y k 1i (1) i C ki 1 y k 1i .
i! (k 1 i )!
i 0
Аналогично доказывается формула
y n y0
n
n
n(n 1) 2
y0
y0 ... n y0 Cni in y0 (1 ) n y0 . (1.9)
1!
2!
i 0
Из определения конечных разностей вытекают следующие свойства
1.
если f ( x) u( x) v( x) , то f ( x) u( x) v( x) ;
2.
3.
если f ( x) c u( x) , c const , то f ( x) c u( x) ;
конечные разности n –го порядка от многочлена степени n постоянны n Pn ( x) n!a0 h n const , а n1 Pn ( x) 0 ;
4.
m (n f ( x)) mn f ( x) .
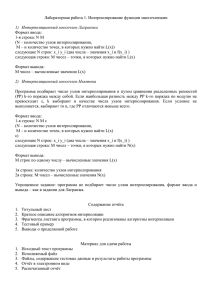
Таблицу конечных разностей обычно располагают следующим образом:
8
Таблица 1.1 Конечные разности
x
f
x0
f0
f
2 f
3 f
4 f
5 f
6 f
f 0
x1
2 f 0
f1
f1
x2
3 f 0
2 f1
f2
4 f 0
f 2
x3
3 f1
2 f 2
f3
4 f1
f 3
x4
3 f 2
2 f 3
f4
6 f 0
5 f1
4 f 2
f 4
x5
5 f 0
3 f 3
2 f 4
f5
f 5
x6
f6
Лекция 2 Интерполяционные формулы Ньютона
1 Теорема о существовании интерполяционного многочлена.
2 Первая интерполяционная формула Ньютона.
3 Вторая интерполяционная формула Ньютона.
1 Теорема о существовании интерполяционного многочлена
Пусть на отрезке [a, b] в n 1 узле xk x0 kh (k 0,1,2,.., n)
заданы
значения
ограниченной
функции
f (x) :
y0 f ( x0 ), y1 f ( x1 ), y 2 f ( x2 ),..., y n f ( xn ) . Поставим задачу
нахождения полинома Pn (x) степени не выше n такого, чтобы выполнялось условие
f ( xi ) Pn ( xi ), i 0,1,..., n .
(1.10)
Теорема 1. Существует и притом единственный многочлен степени не выше n , для которого выполняется условие (1.10).
9
Доказательство. Пусть многочлен Pn (x) имеет вид (1.3). Используя (1.10), для определения коэффициентов a i , получим систему (1.4)
линейных алгебраических уравнений, которую запишем в виде
a0 x0 n a1 x0 n1 a2 x0 n2 ... an1 x0 an f ( x0 ),
a0 x1n a1 x1n1 a2 x1n2 ... an1 x1 an f ( x1 ),
. . . . . . . . . . . . . . . . . . . . . . . .
a0 xn a1 xn
n
n 1
a2 xn
n2
(1.11)
... an 1 xn an f ( xn ) .
Определитель системы (1.11) является определителем Вандермонда и
имеет вид
D
n
( xi x j ) 0 .
i , j 0
i j
Следовательно, для системы различных между собой узлов система
(1.11) имеет единственное решение. Теорема доказана.
2 Первая интерполяционная формула Ньютона
Очевидно, что условие (1.10) эквивалентно условию
m Pn ( x0 ) m y0 , m 1,2,...,n .
(1.12)
Будем искать интерполяционный полином в виде
Pn ( x) a0 a1 ( x x0 ) ... an ( x x0 ) ( x x1 ) ... ( x xn 1 ) . (1.13)
Из (1.13) при x x0 сразу получим Pn ( x0 ) y0 a0 . Найдем первую
конечную разность
Pn ( x) a1 h 2a 2 ( x x0 )h ... nan ( x x0 ) ( x x1 ) ... ( x x n2 )h .
y 0
.
1!h
Аналогично, учитывая (1.12), для второй конечной разности справедлива формула
2 Pn ( x0 ) 2 y0 2 1 a2 h 2 и, следовательно,
Применяя (1.12), для коэффициента a1 получим выражение a1
a2
2 y 0
2! h 2
.
10
Продолжая наши рассуждения, запишем формулу для любого a i :
ai
i y 0
. Подставляя в (1.13) выражения для коэффициентов a i чеi! h i
рез конечные разности, получим первую интерполяционную формулу Ньютона
Pn ( x) y 0
y 0
n y 0
( x x 0 ) ...
( x x 0 )( x x1 ) ... ( x x n 1 ) . (1.14)
1! h
n! h n
При h 0 справедливы следующие пределы
lim
h 0
k y 0
h
k
dky
k
y ( k ) ( x 0 ),
dx
x x0
lim ( x x 0 ) ... ( x x n 1 ) ( x x 0 ) n .
h 0
Отсюда следует, что при h 0 интерполяционный полином (1.14)
принимает вид полинома Тейлора
Pn ( x) y( x0 ) y (1) ( x0 )( x x0 )
y ( 2) ( x0 )
y ( n) ( x0 )
( x x0 ) 2 ...
( x x0 ) n .
2!
n!
Для практических целей формулу Ньютона (1.14) удобнее записыx x0
вать в несколько ином виде. Введем переменную q
. Тогда
h
x x0 qh . Таким образом, для полинома Pn (x) получим выражение
Pn ( x(q)) y0 qy0
q(q 1) 2
q(q 1)( q 2)...( q n 1) n
y0 ...
y0 .(1.15)
2!
n!
Формулу (1.15) выгодно использовать для интерполирования в
окрестности начального значения x0 . Поэтому ее часто называют
формулой для интерполирования вперед. В этой формуле из таблицы
конечных разностей используются k f 0 верхней диагонали.
Остаточный член в формуле (1.15) имеет вид
Rn ( x) h n1
q(q 1)...( q n) ( n1)
f
( ) ,
(n 1)!
где – некоторая внутренняя точка наименьшего промежутка, содержащего все узлы xi , i 1,2, ..., n и точку x . При наличии дополнитель-
11
ного узла x n 1 на практике пользуются более удобной приближенной
формулой
n1 y 0
Rn ( x )
q(q 1)...( q n) .
(n 1)!
При n 1 из (1.15) получается формула линейного интерполирования
P1 ( x) y0 qy0 .
При n 2 из (1.15) имеет место формула параболического или квадратического интерполирования
P2 ( x) y0 qy0
q(q 1) 2
y0 .
2!
3 Вторая интерполяционная формула Ньютона
Первая интерполяционная формула Ньютона практически неудобна для интерполирования функций в конце таблицы. Поэтому когда
точка интерполирования лежит вблизи точки x n удобно пользоваться
второй интерполяционной формулой Ньютона, которая имеет вид
Pn ( x) y n
y n
n y n
( x x n ) ...
( x x n )( x x n 1 ) ... ( x x1 ) . (1.16)
1! h
n! h n
Вводя новую переменную q
x x0
, эту формулу перепишем в виде
h
Pn ( x(q)) yn qyn 1 ...
q(q 1)( q 2)...( q n 1) n
y0 .
n!
(1.17)
В формуле (1.17) из таблицы конечных разностей используются k f i
нижней диагонали.
Остаточный член формулы (1.17) имеет вид
Rn ( x) h n1
q(q 1)...( q n) ( n1)
f
( ) ,
(n 1)!
где точка имеет тот же смысл, что и ранее.
Отметим, что формулы Ньютона используются и для экстраполирования функций. Если x x0 , то для экстраполирования назад используют первую интерполяционную формулу Ньютона. Если x x0 ,
12
то для экстраполирования вперед используют вторую интерполяционную формулу Ньютона. Следует заметить, что операция экстраполирования менее точна, чем операция интерполирования в узком смысле.
Лекция 3 Интерполирование внутри таблицы
1 Первая и вторая интерполяционные формулы Гаусса.
2 Интерполяционная формула Ньютона-Стирлинга.
3 Интерполяционная формула Ньютона-Бесселя.
1 Первая и вторая интерполяционные формулы Гаусса
Основным недостатком интерполяционных формул Ньютона является то, что они используют лишь односторонние значения функции.
На практике часто оказывается полезным использовать формулы, в
которых присутствуют как последующие, так и предыдущие значения
функции по отношению к ее начальному значению y0 .
2n 1
Рассмотрим
равноотстоящих
узлов
xn , xn1 ,..., x1 , x0 , x1 , x2 ,..., xn , в которых заданы значения некоторой
функции yi f ( xi ), i n,..., n . Требуется найти полином степени не
выше 2 n , такой, чтобы выполнялось условие
P2n ( xi ) yi f ( xi ), i 0,1,2,..., n .
(1.18)
Будем искать полином в виде
P2n ( x) a 0 a1 ( x x0 ) a 2 ( x x0 )( x x1 ) a3 ( x x0 )( x x1 )( x x 2 )
... a2n ( x x n 1 ) ... ( x x1 )( x x0 )( x x1 ) ... ( x xn ) . (1.19)
Поступая по аналогии с выводом первой интерполяционной формулы
Ньютона, для коэффициентов ai получим следующие выражения
a0 y0 , a1
y0
2 y1
3 y1
4 y 2
, a2
, a3
, a4
,...,
2
3
1! h
2! h
3! h
4! h 4
a 2n1
2n1 y n1
(2n 1)! h
, a 2n
2 n 1
13
2 n y n
(2n)! h 2n
.
(1.20)
x x0
и, подставляя преобразованные
h
выражения для коэффициентов (1.20) в соотношение (1.19), получим
первую интерполяционную формулу Гаусса (для интерполирования
вперёд)
Введем новую переменную q
q(q 1) 2
(q 1)q(q 1) 3
y1
y1
2!
3!
(q 1)q(q 1)( q 2) 4
(q n 1)...( q 1)q(q 1)...( q n 1)
y 2 ...
4!
(2n 1)!
(q n 1)...( q 1)q (q 1)...( q n) 2 n
2 n 1 y n 1
y n .
(1.21)
(2n)!
P2 n ( x) y0 qy0
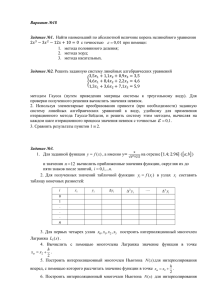
Разности y0 , 2 y1 , 3 y1 , 4 y 2 , 5 y 2 , 6 y3 , ..., используемые в этой формуле, образуют нижнюю ломаную линию в таблице
разностей 1.2.
Если полином P2n ( x) искать в виде
P2n ( x) a0 a1 ( x x0 ) a2 ( x x1 )( x x0 ) a3 ( x x1 )( x x0 )( x x1 )
... a4 ( x x2 )( x x1 )( x x0 )( x x1 ) a2 n1 ( x xn1 ) ... ( x x0 )
... ( x xn1 ) a2 n ( x xn ) ... ( x x1 )( x x0 )( x x1 ) ... ( x xn1 ) ,
то аналогично (1.21) можно получить вторую интерполяционную
формулу Гаусса (для интерполирования назад)
(q 1)q 2
(q 1)q(q 1) 3
y1
y 2
2!
3!
(q 1)q(q 1)( q 2) 4
(q n 1)...( q 1)q(q 1)...( q n 1)
y 2 ...
4!
(2n 1)!
(q n 1)...( q 1)q(q 1)...( q n) 2 n
2 n 1 y n
y n .
(1.22)
(2n)!
P2n ( x) y0 qy1
Разности y1 , 2 y1 , 3 y 2 , 4 y 2 , 5 y3 , 6 y3 , ..., используемые в этой формуле, образуют верхнюю ломаную линию в таблице
разностей 1.2.
Формулы Гаусса применяются для интерполирования в середине
таблицы вблизи x0. При этом первая формула Гаусса (1.21) применяется при x>x0, а вторая (1.22) – при x<x0.
14
Таблица 1.2 Диагональная таблица разностей
x
y
x 4
y 4
x 3
y
2 y
3 y
3 y 4
2 y3
y 2
4 y 4
y 2
3 y 3
2 y 2
y1
3 y 2
2 y1
y0
6 y 2
5 y1
4 y0
y2
x3
5 y 2
3 y0
2 y1
y2
6 y3
4 y1
y1
x2
5 y 3
3 y1
2 y0
y1
6 y 4
4 y 2
y0
x1
5 y 4
4 y3
y1
x0
6 y
2 y 4
y3
x1
5 y
y 4
y 3
x 2
4 y
3 y1
2 y2
y3
y3
x4
y4
2 Интерполяционная формула Ньютона-Стирлинга
Среднее арифметическое первой (1.21) и второй (1.22) формул
Гаусса дает интерполяционную формулу Ньютона-Стирлинга
P2n ( x) y 0
y 0 y 1
q2 2
(q 2 1)q 3 y 1 3 y 2
q
y 1
2
2!
3!
2
q 2 (q 2 1) 4
(q n 1)...( q 1)q(q 1)...( q n 1)
y 2 ...
4!
(2n 1)!
2n1 y n1 2n 1 y n q 2 (q 2 1)...( q 2 (n 1) 2 ) 2n
y n .
2
(2n)!
15
Остаточный член интерполяционной формулы Ньютона-Стирлинга
q 2 (q 2 1)...( q 2 n 2 ) ( 2n1)
f
( ) ,
(2n 1)!
где точка принадлежит отрезку, содержащему узлы x0 nh , x0 nh
и точку x .
R2n ( x) h 2n1
имеет вид
3 Интерполяционная формула Ньютона-Бесселя
Кроме формулы Ньютона-Стирлинга для 2n 2 равноотстоящих
узлов xn , xn1 ,..., x1 , x0 , x1 , x2 ,..., xn1 часто используют интерполяционную формулу Ньютона-Бесселя, которая имеет вид
P2 n 1 ( x)
y 0 y1
q(q 1) 2 y 1 2 y 0
1
(q )y 0
2
2
2!
2
1
(q )q(q 1)
q(q 1)( q 1)( q 2) 4 y 2 4 y 1
2
3 y 1
3!
4!
2
...
q(q 1)...( q n)( q n 1) 2n y n 2n y n 1
(2n)!
2
1
(q )q(q 1)( q 1)...( q n)( q n 1)
2
2n 1 y n .
(2n 1)!
Остаточный член интерполяционной формулы Ньютона-Бесселя следующий
R2n2 ( x) h 2n2
q(q 1)...( q n)( q n 1) ( 2n2)
f
( ) ,
(2n 2)!
где точка
принадлежит отрезку, содержащему узлы x0 nh ,
x0 nh h и точку x .
Формулы с центральными разностями следует использовать, когда
интерполирование проводится в середине таблицы. Если при этом
q 0.25 , то целесообразно применять интерполяционную формулу
Ньютона-Стирлинга, а при 0.25 q 0.75 – интерполяционную формулу Ньютона-Бесселя.
Следует отметить, что все приведенные выше формулы являются
различными формами записи интерполяционного многочлена и поэто16
му любая из них может быть использована для интерполирования
функции. Однако с вычислительной точки зрения они не равноценны.
Каждая форма записи организована таким образом, что для соответствующего случая расположения точки интерполирования x , в первую
очередь вычисляются слагаемые, влияние которых на результат наиболее существенен.
Замечание. При интерполировании функций, заданных таблицей с
постоянным шагом h аргумента, рекомендуется руководствоваться
следующими правилами:
1. Составляя таблицу разностей, определяют максимальный порядок разностей, которые ведут себя правильно. Это означает следующее. Обычно значения функции в таблице приближенные. Если их
предельная абсолютная погрешность может достигать половины единицы последнего разряда, то погрешность в разностях первого порядка
может достигать уже единицы последнего разряда, в разностях второго
порядка – двух единиц последнего разряда и т.д.
Для гладких функций обычно разности убывают с порядком, при
некотором порядке становятся почти постоянными, и, следовательно,
разности следующего порядка будут малы, но из-за неточности значений функции в дальнейшем с увеличением порядка разности начинают
расти, имея беспорядочные знаки. Они-то уже и будут неправильными
и их нельзя использовать при интерполировании.
2. Определив наивысший порядок разностей, которые можно использовать при интерполировании, выбирают интерполяционную формулу. Если значение x находится близко к началу отрезка [a, b] , то
при интерполировании нужно использовать формулу Ньютона для интерполирования вперед, а при x близких к концу отрезка – формулу
Ньютона для интерполирования назад, так как только эти формулы
допускают использование правильных разностей до максимального
порядка. Если же значения x , для которого нужно вычислить значение
функции, находится на отрезке [ xi , xi 1 ] , то нужно применять формулы
Стирлинга или Бесселя, применяя за начальный узел в них узел x i или
xi 1 в зависимости от того, который из них ближе к x . При этом применяется формула Стирлинга, если q 0.25 и формула Бесселя при
0.25 q 0.75 . Кроме того, при использовании формулы Стирлинга
необходимо учитывать последнюю правильную разность нечетного
порядка, а при использовании формулы Бесселя – последнюю правильную разность четного порядка.
17
Лекция 4 Интерполирование функций для
неравноотстоящих узлов
1 Разностные отношения и их свойства.
2 Интерполяционный многочлен Лагранжа.
3 Погрешность формулы Лагранжа.
1 Разностные отношения и их свойства
В том случае, когда значения аргумента являются неравноотстоящими для исследования и вычисления функции используются разностные отношения (разделенные разности). Пусть на отрезке [a, b] заданы
произвольные
попарно
различные
узлы
интерполирования
x0 , x1 , x2 ,..., xn1 , xn , в которых известны значения некоторой функции
f (x) : y0 f ( x0 ), y1 f ( x1 ), y 2 f ( x2 ),..., y n f ( xn ) .
Разностными отношениями первого порядка называются величины
f ( x1 ) f ( x0 )
f ( x2 ) f ( x1 )
, f ( x1, x2 )
,
x1 x0
x2 x1
f ( xk 1 ) f ( xk )
.
, ... , f ( xk , xk 1 )
xk 1 xk
f ( x0 , x1 )
(1.23)
По разностным отношениям первого порядка составляются разностные
отношения второго порядка
f ( x 0 , x1 , x 2 )
f ( x1 , x2 , x3 )
f ( x1 , x 2 ) f ( x 0 , x1 )
,
x2 x0
f ( x2 , x3 ) f ( x1 , x2 )
,... .
x3 x1
(1.24)
Разностные отношения любого порядка n (n 1,2,3,...) определяются
при помощи разностных отношений предыдущего порядка n 1 по
формуле
f ( x0 , x1 ,..., x n1 , x n )
f ( x1 , x 2 ,..., x n1 , x n ) f ( x0 , x1 ,..., x n1 )
.
x n x0
(1.26)
Используя определение, можно показать, что разностное отношение является симметрической функцией своих аргументов так, что выполняется равенство
18
f ( x0 , x1 ,..., xi , xi 1 ,..., xn1 , xn ) f ( x0 , x1 ,..., xi 1 , xi ,..., xn1 , xn ) . (1.27)
Лемма 1. Если Pn (x) полином степени n , то его конечная разность n 1 порядка равна нулю для любой системы попарно различных между собой чисел x, x0 , x1 , x2 ,..., xn1 , xn
Pn ( x, x0 , x1 , x2 ,..., xn1 , xn ) 0 .
(1.28)
Доказательство. Так как полином Pn ( x) Pn ( x0 ) имеет корень в
точке x0 , по определению, получим
Pn ( x, x0 )
Pn ( x0 ) Pn ( x)
Pn1 ( x) .
x0 x
С учетом (1.24) полином Pn ( x0 , x1 ) Pn ( x, x0 ) обращается в нуль в
точке x1 и вторая конечная разность будет полиномом степени n 2
Pn ( x, x0 , x1 )
Pn ( x0 , x1 ) Pn ( x, x0 )
Pn2 ( x) .
x1 x
Продолжая аналогичные рассуждения, приходим к выводу, что
Pn ( x, x0 , x1, x2 ,..., xn 1, xn , xn 1 ) P( x0 ) const ,
и, следовательно, для разностного отношения n 1 порядка справедливо равенство (1.28). Лемма доказана.
Теперь получим выражения разностных отношений всех порядков
через значения функции. Из определения разностного отношения первого порядка имеем
f ( x0 , x1 )
f ( x0 )
f ( x1 )
.
x0 x1 x1 x0
Для разностного отношения второго порядка получим
f ( x 0 , x1 , x 2 )
1
f ( x1 , x 2 ) f ( x0 , x1 )
x 2 x0
f ( x1 )
f ( x0 )
f (x2 )
f ( x1 )
1
x 2 x 0 x1 x 2 x 2 x1 x 0 x1 x1 x 0
19
(1.29)
f ( x0 )
f ( x1 )
f ( x2 )
.
( x0 x1 )( x0 x2 ) ( x1 x0 )( x1 x2 ) ( x2 x0 )( x2 x1 )
(1.30)
Докажем, что
n
f ( xi )
f ( x 0 , x1 , x 2 ,..., x n 1 , x n )
i 0 x i x 0 ... x i x i 1 x i x i 1 ... x i x n
n
f ( xi )
,
i 0 ( xi )
(1.31)
n
где ( x) ( x x j ) , а ( xi ) значение производной от (x) в точке
j 0
xi .
Доказательство проведем по индукции. Пусть формула верна для
n k . Тогда
k 1 f ( xi ) k f ( xi )
: xk 1 x0
f ( x0 , x1 ,..., xk , xk 1 )
i 1 ( xi ) i 0 ( xi )
k f ( x )( x x x x
f ( x0 )
i
i
0
i
k 1 )
( x0 x1 )...( x0 xk )( x0 xk 1 ) i 1
( xi )( xk 1 x0 )
k 1 f ( x )
f ( xk 1 )
i
.
( xk 1 x0 )( xk 1 x1 )...( xk 1 xk ) i 1 ( xi )
Приведем еще выражение любого значения f ( xn ) функции через
начальное
значение
и
разностные
отношения
f ( x0 )
f ( x0 , x1, x2 ), ... для начальной точки x0 . Из определения
f ( x0 , x1 ) вытекает равенство
f ( x0 , x1 ),
f ( x1 ) f ( x0 ) ( x1 x0 ) f ( x0 , x1 ) .
(1.32)
На основании соотношений (1.32) и (1.30) будем иметь
f ( x2 ) f ( x1 ) ( x2 x1 ) f ( x1, x2 ) f ( x0 ) ( x1 x0 ) f ( x0 , x1 )
( x2 x1 ) f ( x1 , x2 ) ( x2 x0 ) f ( x0 , x1 , x2 )
f ( x0 ) ( x2 x0 ) f ( x0 , x1 ) ( x2 x0 )( x2 x1 ) f ( x0 , x1 , x2 ) .
Используя индукцию, получим
20
f ( xn ) f ( x0 ) ( xn x0 ) f ( x0 , x1) ( xn x0 )( xn x1) f ( x0 , x1, x2 ) ....
( xn x0 ) ... ( xn xn1 ) f ( x0 , x1 , x2 ,..., xn ) .
(1.33)
Отметим некоторые свойства разностных отношений
1.
2.
3.
4.
аддитивности.
Если
то
f ( x) u ( x) v( x) ,
f ( x0 , x1 ) u( x0 , x1 ) v( x0 , x1 ) .
Свойство подобия. Если f ( x) cu( x) , где c const , то
f ( x0 , x1 ) cu( x0 , x1 ) .
Свойство
симметрии.
Разностное
отношение
f ( x0 , x1 ,..., xn1 , xn ) есть симметричная функция своих аргументов (см. (1.27)).
Если f (x) есть многочлен степени n , то разностное отношение n -го порядка f ( x0 , x1 ,..., xn ) не зависит от x0 , x1 ,..., xn и
равняется коэффициенту при старшей степени x в многочлене
f (x) . Все разностные отношения порядка большего n равны
нулю (см. лемму 1).
Свойство
Установим связь между разностными отношениями и конечными
разностями. Предположим, что значения аргумента x0 , x1 ,..., xn являются равноотстоящими x0 , x1 x0 h, ,..., xn x0 nh . Тогда получим
f ( x0 h) f ( x0 ) y0
(1.34)
f ( x0 , x1 ) f ( x0 , x0 h)
.
x0 h x0
1!h
Для разностного отношения второго порядка имеем
f ( x0 , x1 , x2 ) f ( x0 , x0 h, , x0 2h)
f ( x1 , x2 ) f ( x0 , x1 ) 1 y1 y0 2 y0
.
x2 x0
2h 1! h 1! h 2!h 2
И для n -го разностного отношения имеет место равенство
f ( x0 , x0 h,..., x0 nh)
n y 0
n!h n
.
(1.35)
2 Интерполяционный многочлен Лагранжа
Рассмотренные в лекциях 1-3 формулы, пригодны лишь для случая
равноотстоящих узлов. Построим формулу для произвольного расположения узлов интерполирования.
21
Пусть на отрезке [a, b] заданы произвольные попарно различные
узлы интерполирования x0 , x1 , x2 ,..., xn1 , xn , в которых известны значения
некоторой
функции
f (x) :
y0 f ( x0 ), y1 f ( x1 ), y 2 f ( x2 ),..., y n f ( xn ) . Построим полином
Ln (x) , для которого выполняется равенство
Ln ( xi ) f ( xi ), i 0,1,..., n .
(1.36)
Решим сначала вспомогательную задачу и построим полином
Pn,i ( x ) степени n , удовлетворяющий следующему условию
0, при i j
Pn, i ( x j )
1, при i j.
(1.37)
Из условия (1.37) следует, что полином Pn,i ( x) имеет n корней в узлах
x0 , x1, x2 ,..., xi 1, xi 1,..., xn 1, xn . Следовательно, он может быть записан в
виде
Pn,i ( x) k i ( x x0 )( x x1 )...( x xi 1 )( x xi 1 )...( x x n ) .
Так как Pn,i ( xi ) 1 , то для коэффициентов k i получаем выражение
ki ( xi x0 )( xi x1 )...( xi xi 1 )( xi xi 1 )...( xi xn )1 .
Очевидно, что тогда полином Ln (x) , удовлетворяющий (1.36), можно
записать в виде
n
Ln ( x) Pn,i ( x) yi .
(1.38)
i 0
Формула (1.38) называется интерполяционной формулой Лагранжа.
Обычно формулу Лагранжа записывают в другом виде. Рассмотрим
полином (x) степени n 1
( x) ( x x0 )( x x1 )...( x xi 1 )( x xi )( x xi 1 )...( x xn ) .
Для первой производной справедливо выражение
( x)
n
n
( x xi ) .
j 0 i 0
i j
22
С учетом введенных обозначений полином Лагранжа записывается в
виде
n
yi
Ln ( x ) ( x )
.
(1.39)
i 0 ( x xi ) ( xi )
В отношении вычислений формула Лагранжа удобна при интерполировании многих функций в одной точке x , так как значения множителей k i (x) можно вычислить однажды и для всех функций. Формула Лагранжа имеет и существенный недостаток. Так при прибавлении одного или нескольких узлов (например, когда точность мала) все
вычисления необходимо производить заново. В формуле не только
добавляются новые члены, но необходимо пересчитывать и все ранее
найденные члены суммы, так как в них появляются новые множители.
3 Погрешность формулы Лагранжа
Проводя интерполирование по формуле (1.39), мы допускаем некоторую погрешность Rn ( x) f x Ln ( x) , которая является нулевой
в общем случае только в узлах интерполирования. Будем считать, что
на отрезке интерполирования [a, b] функция f (x) имеет все производные вплоть до n 1 порядка включительно. Рассмотрим вспомогательную функцию
( x) f x Ln ( x) k ( x) .
Очевидно, что (x) имеет n 1 корней в узлах x0 , x1 , x2 ,..., xn1 , xn .
Выберем произвольную точку x a, b и подберем постоянную k так,
чтобы выполнялось равенство
( x ) f x Ln ( x ) k( x ) 0 .
f x Ln ( x )
. При таком
( x )
выборе k функция (x) имеет n 2 корня на отрезке интерполирования [a, b] и обращается в ноль на концах отрезков
[ x0 , x1 ], [ x1 , x2 ],..., [ xi , x ], [ x , xi 1 ],..., [ xn1 , xn ] . Следовательно, по теореме Ролля (x) имеет n 1 корень на [a, b] , (x) имеет на [a, b] n
Тогда отсюда определяется значение k : k
корней и так далее, (n1) ( x) имеет, по крайней мере, один корень на
[a, b] в некоторой точке . Значит (n1) ( ) f (n1) ( ) k (n 1)! 0 .
23
Подставляя k из последнего выражения в предыдущее, получим выражение для погрешности интерполирования
Rn ( x )
f ( n 1) ( )
(x)
(n 1)!
(1.40)
на отрезке [a, b] .
Если известна постоянная M n1 max f ( n1) ( x) , то для погрешx[ a ,b ]
ности интерполирования (1.40) можно воспользоваться оценкой
Rn ( x )
M n1
( x) .
(n 1)!
(1.41)
Лекция 5 Интерполяционные формулы Ньютона для
неравноотстоящих узлов
1 Первая и вторая интерполяционные формулы Ньютона.
2 Минимизация остатка интерполирования.
3 Оценка погрешности. Пример.
1 Первая и вторая интерполяционные формулы Ньютона
Покажем, что, используя понятие разностных отношений, формулу
Лагранжа можно записать в виде аналогичном первой и второй интерполяционным формулам Ньютона для равноотстоящих узлов. Пусть
Ln (x) полином Лагранжа, для которого выполняется условие
Ln ( xi ) f ( xi ), i 0,1,..., n .
(1.42)
Ln ( x 0 ) Ln ( x )
и Ln ( x) Ln ( x0 ) Ln ( x, x0 )( x x0 ) .
x0 x
По определению, для второго разностного отношения имеем
Тогда Ln ( x, x0 )
Ln ( x, x0 , x1 )
Ln ( x0 , x1 ) Ln ( x, x0 )
.
x1 x
Откуда Ln ( x, x0 ) Ln ( x0 , x1 ) Ln ( x, x0 , x1 )( x x1 ) . Последовательно
выражая разностные отношения m -го порядка через отношения m 1 го порядка по формуле
24
Ln ( x, x0 ,..., xm1 ) Ln ( x0 , x1 ,..., xm ) Ln ( x, x0 ,..., xm )( x xm ) ,
окончательно для полинома Ln (x) получим представление
Ln ( x) Ln ( x 0 ) Ln ( x 0 , x1 )( x x 0 ) Ln ( x 0 , x1 , x 2 )( x x 0 )( x x1 )
... Ln ( x 0 , x1 ,..., x i )( x x 0 )( x x1 )...( x x i 1 ) ...
Ln ( x0 , x1 ,..., xn )( x x0 )( x x1 )...( x xn 1 )
Ln ( x, x0 , x1 ,..., xn )( x x0 )( x x1 )...( x xn ) .
Учитывая (1.42) и то, что Ln ( x, x0 ,..., xm ) 0 , получим первую интерполяционную формулу Ньютона для неравноотстоящих узлов
Pn ( x) f ( x0 ) f ( x0 , x1)( x x0 ) f ( x0 , x1, x2 )( x x0 )( x x1) ...
(1.43)
f ( x0 , x1 , x 2 ,..., x n )( x x0 )( x x1 )...( x x n1 ) .
Аналогичным образом можно построить и вторую интерполяционную формулу Ньютона для неравноотстоящих узлов, которая
имеет вид
Pn ( x) f ( x n ) f ( x n , x n1 )( x x n ) f ( x n , x n1 , x n2 )( x x n )( x x n1 )
(1.44)
... f ( xn , xn 1, xn 2 ,..., x0 )( x xn )( x xn 1)...( x x1) .
Кроме формул (1.40) и (1.41) для оценки погрешности получим еще
одну исходя из формулы Ньютона. Добавим к узлам
x0 , x1 , x2 ,..., xn1 , xn еще один узел x , то есть точку, в которой вычисляется значение функции f (x) . Тогда по формуле выражающей значения функции в узле через начальные разностные отношения, получим
f ( x) f ( x0 ) f ( x0 , x1 )( x x0 ) f ( x0 , x1 , x 2 )( x x0 )( x x1 ) ...
f ( x0 , x1 , x2 ,..., xn )( x x0 )( x x1 )...( x xn1 )
f ( x0 , x1 ,..., xn , x)( x x0 )...( x xn1 )( x xn ) .
Заметим, что в правой части сумма всех слагаемых без последнего интерполяционной формулой Ньютона (1.43). Тогда
f ( x) Pn ( x) f ( x0 , x1 ,..., xn , x)( x x0 )...( x xn1 )( x xn ) ,
или
R( x) f ( x) Pn ( x) ( x) f ( x0 , x1 ,..., xn , x) .
Сравнивая формулы (1.40) и (1.45) получим, что
25
(1.45)
f ( x0 , x1 ,..., xn , x)
f ( n1) ( )
.
(n 1)!
2 Минимизация остатка интерполирования
Пусть функция f (x) приближается на отрезке [a, b] с помощью
интерполяционного многочлена степени n с узлами интерполяции
x0, x1 , x2 ,..., xn 1 [a, b] . Рассмотрим выражение для погрешности в виде (1.40)
Rn ( x )
f ( n1) ( )
( x) .
(n 1)!
(1.46)
Поставим перед собой задачу путем выбора узлов интерполирования минимизировать погрешность на отрезке [a, b] для функции f (x) .
Если считать, функция f ( n1) ( x) мало меняется на отрезке [a, b] , то
нам нужно на этом отрезке минимизировать величину (x) . Эта задача вплотную примыкает к задаче, решенной русским математиком
П.Л.Чебышевым:
Среди всех многочленов степени n с коэффициентом равным единице при старшей степени найти многочлен, наименее уклоняющийся от нуля на отрезке [1,1] .
Многочленом Чебышева, определенным на отрезке [1,1] , называется многочлен
Tn ( x) cos(n arccos x), n 0 .
Учитывая, что
cos(n 1) cos n cos sin n sin 2 cos n cos
(cos n cos sin n sin ) 2 cos n cos cos(n 1) ,
и, считая arccos x , получим следующую рекуррентную формулу
Tn1 ( x) 2 xTn ( x) Tn1 ( x), n 1,2,... .
Приведем несколько частных выражений
T0 ( x) 1, T1 ( x) x, T2 ( x) 2x 2 1, T3 ( x) 4x 3 3x,
T4 ( x) 8x 4 8x 2 1,....
26
(1.47)
Из соотношения (1.47) вытекают следующие свойства многочленов
Чебышева
1.
2.
3.
4.
При четном n многочлен содержит только четные степени x ,
а при нечетном n – только нечетные степени x .
Старший коэффициент многочлена Чебышева Tn (x) при n 1
равен 2 n1 .
Многочлен Tn (x) имеет n действительных корней в интерва (2i 1)
ле (1,1) в точках xi cos
, i 0,1,2,..., n 1 .
2n
Многочлен Tn (x) принимает максимальное по модулю значение в точках xm cos
m
, m 0,1,2,..., n , которые называются
n
точками чебышевского альтернанса. При этом справедливо
равенство Tn ( xm ) (1) m .
Теорема 2. Среди всех многочленов степени n со старшим коэффициентом равным единице наименьшее значение максимума модуля
на отрезке [1,1] имеет многочлен
Tn ( x) 21n Tn ( x), n 1,2,3,....
Доказательство проведем методом от противного. Пусть существует многочлен Pn ( x) x n 1 x n1 ... n1 x n такой, что справедливо неравенство
max Pn ( x) max Tn ( x) 21n .
[ 1,1]
[ 1,1]
(1.48)
Тогда Rn1 ( x) Tn ( x) Pn ( x) является многочленом степени n 1 . Так
Tn ( xm ) (1) m , то Rn1 ( xm ) 0 в точках x0 , x2 , x4 ,... , и
Rn1 ( xm ) 0 в точках x1 , x3 , x5 ,... . Следовательно, Rn1 ( x) меняет знак
в n точках интервалов [ x0 , x1 ], [ x1 , x2 ],..., [ xn1 , xn ] . Но многочлен степени n 1 не может иметь более n 1 корней. Поэтому соотношение
(1.47) невозможно и для всякого многочлена Pn (x) должно выполняться неравенство
max Tn ( x) 21n max Pn ( x) .
как
[ 1,1]
[ 1,1]
Теорема доказана.
27
Используем доказанную теорему для минимизации отклонения
многочлена (x) от нуля на отрезке [a, b] . Отрезок [a, b] заменой пе2x
ba
ременных t
переводится в отрезок [1,1] . Поэтому, что
ba ba
бы многочлен (x) наименее уклонялся от нуля, на отрезке [a, b] в
качестве
узлов
интерполирования
следует
взять
точки
t k (b a) b a
(2k 1)
xk
, где t k cos
– корни многочлена Че2
2(n 1)
(b a)(t k t )
и для величины
2
отклонения (x) от нуля справедлива формула
бышева степени n 1 . Тогда xk x
( x)
(b a) n1
2 n1
(t )
(b a) n1
2 n1
Tn1 ( x)
(b a) n1
.
2 2n1
При указанном выборе узлов интерполирования из (1.46) для погрешности формулы Лагранжа получим оценку
| Rn ( x) |
| f ( n1) ( ) | (b a) n1
.
(n 1)!
2 2n1
(1.49)
3 Оценка погрешности. Пример
Пример. Оценить, с какой погрешностью можно вычислить по
ln 100 .5 ,
формуле
Лагранжа
если
известны
значения
ln 100 , ln 101, ln 102 , ln 103 .
В данном случае
f ( x) ln x, n 3, a 100 , b 103 , f
( 4)
( x)
6
x4
.
Вычислим значения величин, входящих в формулы (1.46), (1.41) и
(1.49).
6
15
max f ( 4) ( x)
, (100 .5) 0.5 0.5 1.5 2.5
.
x[ a ,b ]
16
100 4
По формуле (1.41) будем иметь
Rn ( x) | ln 100 .5 L3 (100 .5) |
28
6 15
100 4 4!16
2.344 10 9 .
По формуле (1.49) результат будет следующий
Rn ( x) | ln 100 .5 L3 (100 .5) |
6 34
100 4 4!2 7
1.582 10 9 .
Из сравнения полученных результатов видно, что формула (1.49) дает
более точное значение по отношению к (1.46), (1.41).
Лекция 6 Обратное интерполирование
1 Постановка задачи.
2 Формулы для равноотстоящих и неравноотстоящих узлов.
3 Интерполирование с кратными узлами.
1 Постановка задачи
Часто на практике возникает задача об отыскании по заданному
значению функции значения аргумента. Эта задача решается методом
обратного интерполирования.
Если заданная функция монотонна, то обратное интерполирование
проще всего осуществить путем замены функции аргументом и обратно, и последующего интерполирования.
Если заданная функция не монотонна, то этим приемом воспользоваться нельзя. Тогда не меняя ролями функцию и аргумент, записываем ту или иную интерполяционную формулу, используя известные
значения аргумента и считая функцию известной, решаем полученное
уравнение относительно аргумента.
Пусть на отрезке [a, b] заданы узлы интерполирования
и
известны
соответствующие
значения
x0 , x1 , x2 ,..., xn1 , xn
y0 f ( x0 ), y1 f ( x1 ), y 2 f ( x2 ),..., y n f ( xn ) . Теперь необходимо
по заданному значению функции y определить аргумент x , соответствующий этому значению. Для произвольной функции задача обратного интерполирования не может быть решена однозначно. Решение
будет однозначным, если функция f (x) монотонна на минимальном
отрезке, содержащем узлы интерполирования.
2 Формулы для равноотстоящих и неравноотстоящих узлов
Рассмотрим два случая.
Если узлы интерполирования равноотстоящие, то для решения
поставленной задачи можно использовать метод последовательных
29
приближений, который заключается в следующем. Пусть функция
f (x) монотонна и значение y содержится между y0 и y1 . Запишем
первую интерполяционную формулу Ньютона (1.15)
y y0 qy0
q(q 1) 2
q(q 1)( q 2)...( q n 1) n
y0 ...
y0 .
2!
n!
Перепишем ее в виде
q (q)
y y 0 q(q 1) 2
q(q 1)...( q n 1) n
y 0 ...
y 0 . (1.50)
y 0
2! y 0
n! y 0
Для отыскания q можно использовать итерационный процесс
qm (qm1 ), m 1,2,3,... .
(1.51)
y y0
. Для доy 0
статочно гладких функций при малом шаге h итерационный процесс
(1.51) сходится. Если lim qm q , то значение искомого аргумента x
В качестве нулевого приближения можно взять q0
m
определяется из формулы x x0 qh .
В случае неравноотстоящих узлов значение аргумента можно
определить по формуле Лагранжа для обратной функции
( y y 0 )( y y1 )...( y yi 1 )( y yi 1 )...( y y n )
xi .
(
y
i 0
i y 0 )( y i y1 )...( y i y i 1 )( y i y i 1 )...( y i y n )
n
x
3 Интерполирование с кратными узлами
Пусть на отрезке [a, b] заданы m
(1.52)
узлов. В каждом узле
xi , i 1,2,..., m известны значения функции f ( xi ) и ее производных
f (1) ( xi ), f ( 2) ( xi ),..., f (i 1) ( xi ) .
Будем
считать,
что
1 2 ... m n 1 . Необходимо найти многочлен Pn (x) степени
не выше n такой, что выполняется условие
Pn (i ) ( xk ) f (i ) ( xk ), i 0,1,..., k 1; k 1,2,..., m .
(1.53)
Покажем, что система (1.53) имеет единственное решение. Для этого
рассмотрим однородную систему
30
Pn (i ) ( x k ) 0 .
(1.54)
Из (1.54) вытекает, что многочлен Pn (x) имеет корни в узлах x k кратности k . Следовательно, его можно записать в виде
Pn ( x) l ( x x1 )1 ( x x2 ) 2 .... ( x xm ) m .
Справа в этом выражении стоит многочлен степени n 1 и он может
совпадать с многочленом степени n только в том случае, если
Pn ( x) 0 . Последнее означает, что однородная система (1.54) имеет
лишь тривиальное решение и, следовательно, система (1.53) имеет
единственное решение.
Многочлен Pn (x) , который удовлетворяет равенствам (1.53),
называют многочленом Эрмита. Он имеет вид
m k 1
H n ( x)
k 1 i 0
f
(i )
( xk )
An1 ( x)
k i 1
i!( x x k ) k
j 0
1 ( x x k ) k
j! An1 ( x)
j
( x xk ) i j ,
x xk
(1.55)
где An 1 ( x) ( x x1 )1 ( x x2 ) 2 ... ( x xm ) m .
Когда все узлы имеют кратность равную двум, многочлен Эрмита
можно записать в более простой форме
2 ( x)
2
(1)
( x k )) 2
k 1 ( x x k ) (
m
H 2m 1 ( x)
( 2) ( x )
(1 (1) k ( x x k )) f ( x k ) ( x x k ) f
( xk )
(1)
( xk ) .
Если f ( x) n 1 раз непрерывно дифференцируемая функция, то
аналогично тому, как это было сделано для интерполяционного полинома Лагранжа, можно показать, что для погрешности интерполирования с кратными узлами справедлива формула
Rn ( f ) f ( x) H n ( x)
f ( n1) ( )
An1 ( x) .
(n 1)!
(1.56)
Простейшим примером многочлена Эрмита, построенного для одного узла кратности k , является отрезок ряда Тейлора
31
P2k 1 ( x) f ( x 0 )
...
x x0
f
1!
(1)
( x0 )
( x x 0 ) k 1
f
( k 1)!
( x x0 ) 2
f
2!
( k 1)
( 2)
( x0 )
( x0 ) .
Лекция 7 Интерполирование функций многих переменных
1 О проблеме интерполирования функций многих переменных.
2 Интерполяционная формула Ньютона.
1 О проблеме интерполирования функций многих переменных
Интерполирование функций многих переменных значительно
сложнее, чем для одной переменной. Ограничимся случаем двух переn 1
менных. Пусть на плоскости
даны
точка
( x, y)
( x0 , y0 ), ( x1 , y1 ),..., ( xn , y n ) . Будем искать многочлен P( x, y ) относительно ( x, y) возможно низшей степени, который в этих точках принимал соответственно значения z 0 , z1 ,..., z n . Если искомый многочлен
записать в виде
P( x, y) a00 a10 x a01 y a20 x 2 a11xy a02 y 2 ,
то, подставляя данные координаты точек, и приравнивая левую часть
соответствующему значению z i , получим систему n 1 линейных
независимых
алгебраических
уравнений
относительно
(m 1)( m 2)
неизвестных aij . Если не наклады1 2 3 ... m 1
2
вать
на
никаких
дополнительных
условий,
то
P ( x, y )
(m 1)( m 2)
. То есть мы не можем решать задачу при любом
n 1
2
количестве узлов интерполирования – это во-первых.
Рассмотрим определитель получившейся системы. Например, при
n2 и n5
32
1 x0
1 x1
1 x2
1
1
1
1
1
1
y0
y1
y2
x0
x1
x2
x3
x4
x5
y0
y1
y2
y3
y4
y5
x0 2
x12
x2 2
x3 2
x4 2
x5 2
x0 y0
x1 y1
x2 y 2
x3 y3
x4 y 4
x5 y5
y0 2
y12
y2 2
.
y3 2
y4 2
y5 2
Первый определитель обращается в нуль, если все три точки
( x0 , y0 ), ( x1, y1 ), ( x2 , y2 ) лежат на одной прямой; второй равен нулю,
если все шесть точек лежат на одной кривой второго порядка. То есть,
узлы интерполирования не могут быть расположены произвольно – это
во-вторых, а проверка того, что определители не равны нулю довольно
затруднительна.
Третье принципиальное затруднение возникает при оценке остаточных членов, так как теорема Ролля в этом случае неприменима. Отметим так же и то, что более громоздкими становятся рассуждения,
связанные с большим числом переменных.
2 Интерполяционная формула Ньютона
Приведем интерполяционную формулу Ньютона для случая двух
(n 1)( n 2)
переменных. Возьмем
узлов, расположенных следую2
щим образом
( x0 , y0 )
( x1 , y0 )
... ( xn 1 , y0 )
( x0 , y1 )
( x1 , y1 )
... ( xn 1 , y1 )
...
...
( xn , y 0 )
( x0 , yn 1 ) ( x1 , yn 1 )
( x0 , yn ) .
Причем, xi x j , yi y j при i j . Значения x i и y i могут быть
произвольными, так, что взаимное расположение узлов может быть
довольно общим. Обобщение интерполяционной формулы Ньютона
(1.43) для неравных промежутков на случай интерполирования функций двух переменных имеет вид
Pn ( x, y)
n
( x x0 )...( x xi 1 )
k 0 i j k
33
( y y 0 )...(y y j 1 ) f ( x0 , x1 ,.., xi ; y 0 , y1 ,.., y j ) .
(1.57)
Лекция 8 Сходимость интерполяционного процесса
1 Понятия и определения.
2 Теорема о сходимости.
3 Пример на отсутствии сходимости.
1 Понятия и определения
При практическом использовании интерполирования не всегда
удается произвести оценку остаточных членов. Высшие производные,
входящие в эти остаточные члены, не всегда доступны. Поэтому уверенности в том, что, выбрав достаточно большое количество узлов, мы
достаточно хорошо приблизимся к интерполируемой функции, была
бы очень полезна в практическом интерполировании. В связи с этим
возникает задача о сходимости интерполяционного процесса.
Пусть задана треугольная матрица Х
x0(0)
x0(1)
( 2)
x0
...
(n)
x0
...
x1(1)
x1( 2)
...
x1( n )
...
x2( 2)
...
x2( n )
...
.
(n)
... xn
... ...
(1.58)
Будем считать, что все элементы этой матрицы принадлежат отрезку
[a, b] . Для некоторой, заданной на отрезке [a, b] функции f (x) строится последовательность интерполяционных полиномов Лагранжа
Pn ( x), n 1,2,... , причем для построения Pn (x) в качестве узлов интерполирования используются все элементы n -ой строки матрицы
(1.58).
Интерполяционный процесс называется сходящимся, если
lim Pn ( x) f ( x), x [a, b] .
n
(1.59)
Этот процесс равномерно сходится, если сходимость в (1.59) равномерная. В проблеме сходимости основным является вопрос о том, как
34
между собой должны быть связаны свойства функции f (x) и таблицы
Х, чтобы в принятой мере приближения имела место сходимость Pn (x)
к f (x) . Практическая полезность: в ней выясняются условия, при
которых возможно сколь угодно точное вычисление f (x) , если число
узлов взято достаточно большим, хотя пока не дается никакого правила
для нахождения числа узлов n , при котором погрешность становится
меньше заданной границы.
На первый взгляд кажется, что если элементы матрицы с повышением номера строки все плотнее и плотнее заполняют отрезок [a, b] , то
должна быть равномерная сходимость Pn (x) к f (x) хотя бы для непрерывных функций. Однако это не так. Как было показано Фабером,
для любой заданной матрицы узлов Х найдется такая непрерывная
функция f (x) , что построенные для нее интерполяционные многочлены Лагранжа по этим узлам не сходятся равномерно на отрезке [a, b] к
функции f (x) . Поэтому выделение класса функций, для которых имеется равномерная сходимость на тех или иных матрицах узлов Х уделяется большое внимание. Здесь приведем доказательство теоремы о
сходимости, относящейся к целым функциям.
2 Теорема о сходимости
Функция f (x) называется целой, если ее можно представить в
виде степенного ряда
f ( x) a0 a1 ( x x0 ) a2 ( x x0 ) 2 ... an ( x x0 ) n ... ,
сходящегося при всех значениях x .
Теорема 3. Пусть f (x) – целая функция. Тогда последовательность построенных для нее интерполяционных многочленов Pn (x) по
любой треугольной матрице (1.58) с элементами, принадлежащими
отрезку [a, b] , равномерно на отрезке [a, b] сходится к функции f (x) .
Доказательство. Так как сходящиеся степенные ряды можно
дифференцировать, то функция f (x) имеет производные любого порядка. Следовательно, для любого n можем воспользоваться оценкой
остаточного члена
M n1
(1.60)
| Rn ( x) || f ( x) Pn ( x) |
| n ( x) | ,
(n 1)!
35
где
M n1 max | f ( n1) ( x) |, n ( x) ( x x0 ( n) )( x x1( n) )...( x x n ( n) ) .
x[ a ,b ]
Заменяя каждую разность ( x xi(n) ) , на большую (b a) в выражении
n (x) погрешность (1.60) примет вид
| Rn ( x) |
M n1
(b a) n1 .
(n 1)!
Покажем, что правая часть этого неравенства стремится к нулю при
n . Найдем f ( n1) ( x) .
f ( n 1) ( x) (n 1)! an 1 (n 2)( n 1)... 2 1 an 2 ( x x0 )
... (n k )( n k 1)... k an k ( x x0 ) k 1 ... .
Отсюда
| f ( n 1) ( x) | (n 1)! | an 1 | (n 2)( n 1)... 2 1 | an 2 | | ( x x0 ) | ...
(n k )( n k 1)... k | an k | | ( x x0 ) |k 1 ...
(n 1) n1 | an1 | (n 2) n1 | an2 | | ( x x0 ) | ...
(n k ) n1 | ank | | ( x x0 ) |k 1 ... .
n
x
Так как функция n ( x) 1 e n возрастающая при x 0 и
n
n
n
x
x
lim 1 e x , то 1 e x .
n
n
n
nk
Тогда
n 1
n 1
k 1
1
n 1
n 1
e k 1 .
Таким образом,
| f ( n1) ( x) |
(n 1) n1
| a n1 | | a n 2 | (e | x x0 |) ... | a n k | (e | x x0 |) k 1 ... .
Умножим обе части последнего неравенства на произвольное, но фиксированное число S n1 , большее нуля. Получим
36
| f ( n 1) ( x) | n 1
S
| an 1 | S n 1 | an 2 | S n 1 (e | x x0 |)
(n 1) n 1
... | an k | S n 1 (e | x x0 |) k 1 ... .
Обозначим через R наибольшее из двух чисел: S и max (e | x x0 |) .
x[ a ,b ]
Тогда последнее неравенство перепишется в виде
| f ( n1) ( x) |
(n 1) n1
S n1
| ak | R k .
k n 1
Так как это неравенство верно для любого x [a, b] , то
M n1
(n 1) n1
S n1
| ak | R k .
(1.61)
k n 1
Так как ряд a0 a1 ( x x0 ) a2 ( x x0 ) 2 ... an ( x x0 ) n ... абсолютно сходящийся при любых x , то и ряд
| ak | R k
сходится. Сле-
k 0
довательно,
его
остаток
| ak | R k
и
тем
более
k n 1
M n 1
(n 1)
n 1
S n 1 0 при n . Далее
M n1
M n1 (n 1) n1
(b a) n1
(b a) n1 .
(n 1)!
(n 1) n1 (n 1)!
Из разложения
e n 1 1 (n 1)
следует, что e n1
(n 1) 2
(n 1) n 1
...
... ,
2!
(n 1)!
(n 1) n1
.
(n 1)!
Поэтому
M n 1
M n 1
e (b a)n1 .
(b a) n 1
n 1
(n 1)!
(n 1)
37
величина
Теперь, полагая S e (b a) и учитывая (1.61), получаем
M n1
(b a) n 1 0
n ( n 1)!
lim
и, следовательно, lim | Rn ( x) | 0 . Теорема доказана.
n
3 Пример на отсутствии сходимости
Требование, чтобы f (x) была целой, является существенным, на
что показывает следующий пример.
1
2
Рассмотрим на отрезке [-1,1] функцию f ( x) e x , при x 0 .
0, при x 0
Эта функция непрерывна вместе со своими производными на всей числовой прямой. Если выбрать узлы интерполирования только на отрезке
[-1,0], то Pn ( x) 0 и не стремится к f (x) ни при каком положительном значении x .
Тема 2 ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ
1 Постановка задачи.
2 Дифференцирование для равноотстоящих узлов.
3 Дифференцирование для неравноотстоящих узлов.
4 Погрешность формул численного дифференцирования.
1 Постановка задачи
Пусть на отрезке [a, b] рассматривается функция f (x) , имеющая
непрерывную производную порядка n 1 . Возьмем на [a, b] n 1 различный узел (для удобства) x0 x1 ... xn и известны значения
функции в них y0 f ( x0 ), y1 f ( x1 ), ..., y n f ( xn ) . Требуется найти
значение k -ой производной от функции f (x) в любой точке
x [a, b] . Построим интерполяционный многочлен Pn (x) для функции
f (x) степени n с погрешностью R(x) . Тогда запишем
k
f ( x) Pn ( x) R( x) .
Для
производной
порядка
имеем
38
f ( k ) ( x) Pn ( k ) ( x) R ( k ) ( x) . Если погрешность мала, то пренебрегая
ею, получим формулу для приближенного вычисления производной
f ( k ) ( x) Pn ( k ) ( x) . Пользоваться этой формулой целесообразно при
небольших порядках k , когда k n , так как все производные от Pn (x)
порядка выше n тождественно равны нулю.
Получим некоторые явные формулы для численного вычисления
производных при некоторых видах Pn ( k ) ( x) .
2 Дифференцирование для равноотстоящих узлов
Если узлы равноотстоящие, то для вычисления производной удобно пользоваться первой интерполяционной формулой Ньютона
q(q 1) 2
q(q 1)( q 2)...( q n 1) n
y0 ...
y0 .
2!
n!
dP dP dq 1 dP
Учитывая, что
, получим
dx dq dx h dq
Pn ( x(q)) y0 qy0
Pn (1) ( x)
2q 1 2
3q 2 6q 2 3
1
(y 0
y0
y0
h
2
6
2q 3 9q 2 11q 3 4
y 0 ...
12
q(q 1)...( q n 2) ... (q 1)...( q n 1) n
y0 ) ,
n!
Pn ( 2) ( x)
1 2
6q 2 18 q 11 4
3
(
y
(
q
1
)
y
y0 ...) . (2.1)
0
0
12
h2
Аналогично вычисляются производные высших порядков. Если производная вычисляется в узловой точке, то формулы упрощаются. Например, если x x0 , то
2 y0 3 y0 4 y0 5 y0
1
(y0
...) ,
h
2
3
4
5
1
11
5
Pn ( 2) ( x0 ) 2 (2 y0 3 y0 4 y0 4 y0 ...) .
12
6
h
Pn (1) ( x0 )
39
(2.2)
Так как Rn ( x) f ( x) Pn ( x) h n1
q(q 1)...( q n) f ( n1) ( )
, то,
(n 1)!
считая, что f ( x) C[na,b2] , получим
Rn (1) ( x)
hn
(n 1)!
d
d ( n 1)
f ( n 1) ( ) q(q 1)...( q n) q(q 1)...( q n)
f
( ) .
dq
dq
В узлах же интерполирования последняя формула примет вид
Rn (1) ( xi ) (1) ni
h n i!(n i)! ( n1)
f
( ) .
(n 1)!
При шаге h 1 можно считать, что f ( n 1) ( )
(2.3) примет вид
Rn (1) ( xi ) (1) ni
n 1 f 0
h n 1
(2.3)
. Тогда оценка
i!(n i)! n1
f0 .
(n 1)!
3 Дифференцирование для неравноотстоящих узлов
Для случая неравноотстоящих узлов удобно пользоваться формулами Лагранжа или Ньютона для неравноотстоящих узлов. Формула
Лагранжа имеет вид (1.39)
n
f ( xi )
.
i 0 ( x xi ) ( xi )
Ln ( x ) ( x )
Тогда первая производная запишется в форме
n
n
f ( xi )
f ( xi )
( x)
.
2
i 0 ( x xi ) ( xi )
i 0 ( x xi ) ( xi )
Ln (1) ( x) (1) ( x)
(2.4)
Учитывая, что
n
n
1
,
i 0 x xi
(1) ( x) ( x x0 )...( x x j 1 )( x x j 1 )...( x xn ) ( x)
j 0
формулу (2.4) можно переписать в виде
40
n
n
f ( xi )
f ( xi )
1 n
.
Ln (1) ( x) ( x)
k 0 x xk i 0 ( x xi ) ( xi ) i 0 ( x x ) 2 ( x )
i
i
На практике более удобно пользоваться формулой Ньютона (1.43)
Pn ( x) f ( x 0 ) f ( x 0 , x1 )( x x 0 ) f ( x 0 , x1 , x 2 )( x x 0 )( x x1 )
f ( x 0 , x1 , x 2 , x 3 )( x x 0 )( x x1 )( x x 2 )
... f ( x0 , x1 , x2 ,..., xi )( x x0 )( x x1 )...( x xi 1 )
... f ( x0 , x1 , x2 ,..., xn )( x x0 )( x x1 )...( x xn 1 ) .
Для построения формулы численного дифференцирования введем
следующие обозначения 0 x x0 , 1 x x1, ... , i x xi . Тогда
первая производная запишется
Pn(1) ( x) f ( x0 , x1 ) f ( x0 , x1, x2 )( 0 1 )
f ( x0 , x1, x2 , x3 )( 01 1 2 0 2 ) ...
i 1
f ( x0 , x1 ,..., xi ) 01... k 1 k 1... i 1 ...
k 0
n1
(2.5)
f ( x0 , x1 , x2 ,..., xn ) 01... k 1 k 1... n1 ) .
k 0
Вторая производная примет вид
1 ( 2)
1
f ( x) Pn ( 2) ( x) f ( x0 , x1 , x2 ) f ( x0 , x1 , x2 , x3 )( 0 1 0 ) ... . (2.6)
2!
2!
Аналогичным образом можно вычислить производные более высокого порядка.
4 Погрешность формул численного дифференцирования
Рассмотрим сначала случай, когда точка x не принадлежит минимальному отрезку [a, b] , содержащему узлы интерполирования. Введем вспомогательную функцию ( x) f ( x) Ln ( x) k ( x) . Функция
(x) имеет n 1 нулей в точках x0 , x1 , x2 ,..., xn1 , xn по построению.
На основании теоремы Ролля (1) ( x) будет иметь n , ( 2) ( x) – n 1 и
(k ) ( x) будет иметь n k 1 нулей внутри отрезка [a, b] . Выберем
теперь k таким, чтобы x также являлась корнем (k ) ( x) . Так как
41
x [a, b] , то это всегда можно сделать, полагая k
f ( k ) ( x ) Ln ( k ) ( x )
(k ) ( x )
.
Тогда (k ) ( x) будет иметь n k 2 нулей и, следовательно, (n1) ( x)
обращается в нуль, по крайней мере, в одной точке . Получим
(n1) ( ) f (n1) ( ) k (n 1)! 0 . Подставляя выражение для k в последнее равенство, получим выражение для погрешности дифференцирования
Rn( k ) ( f ) f ( k ) ( x ) Ln ( k ) ( x )
Пусть
f
(k )
( x) Ln
x0 x1 x2 ... xn1 xn
(k )
(k ) ( x )
(n 1)!
и
f ( n1) ( ) .
x [ x0 , x n ] .
(2.7)
Разность
( x) обращается на отрезке [ x0 , xn ] в нуль в точках
0 , 1 , 2 ,..., nk . Будем считать, что x i , и рассмотрим функцию
( x) f (k ) ( x) L(nk ) ( x) c( x 0 )(x 1 )...(x nk )
~( x) .
f (k ) ( x) L(k ) ( x) c
n
Если x i , то константу c можно подобрать так, чтобы ( x ) 0 .
Используя последнее условие, получим c
f ( k ) ( x ) Ln ( k ) ( x )
. При
~( x)
указанном выборе c функция (1) ( x) будет иметь n k 1 нулей и
(nk 1) ( x) , по крайней мере, обращается в нуль в одной точке . То
есть (nk 1) ( ) f (n1) ( ) c(n k 1)! 0 . Подставляя выражение
для c в последнее равенство, получим
~ ( x)
Rn( k ) ( f ) f ( k ) ( x) Ln ( k ) ( x)
f ( n1) ( ) .
(2.8)
(n k 1)!
Заметим, что при использовании формул численного дифференцирования может произойти существенная потеря точности. Поясним это
на простом примере.
Пусть
вычисляется
по
формуле
f (x)
f ( x0 )
f ( x1 ) f ( x0 )
h
f ( x0 ) f ( ) . Если max | f ( x) | M 2 , то
[ x0 , xn ]
h
2
42
h
. Допустим, что значения
2
функции f ( x0 ) и f ( x1 ) вычисляются с погрешностью | i | E . В
погрешность формулы будет | r1 | M 2
этом случае появится дополнительная погрешность r2
1 0
h
и
2E
.
h
Величина общей погрешности удовлетворяет неравенству
| r2 |
| r || r1 | | r2 | g (h)
Определим минимум g (h) : g (h)
h0 2
M 2 h 2E
.
2
h
M 2 2E
2 . Отсюда определим
2
h
E
и g (h0 ) 2 EM 2 . Если E const 2 t , где
M2
t разрядность
сетки ЭВМ, то из оценки следует, что f (x) в лучшем случае вычисляется с половиной верных разрядов.
Тема 3 ПРИБЛИЖЕНИЕ ФУНКЦИЙ СПЛАЙНАМИ
Лекция 1 Кубические сплайны
1 Определение интерполяционного сплайна.
2 Построение кубического сплайна.
1 Определение интерполяционного сплайна
Аналитические приближения требуют довольно много хороших
свойств функции, в частности существование производных высокого
порядка, что не всегда имеет место на практике. К тому же, как было
раньше замечено, далекие от точки интерполирования узлы мало влияют на значение функции в этой точке. Поэтому естественно поступить
следующим образом: разбить весь отрезок интерполирования [a, b] на
участки [ xi , xi 1 ] и на каждом из этих участков вычислять свою интерполяционную функцию, определенным образом «сшивая» их в узлах. В
том случае, когда эти функции являются многочленами, интерполирование называется кусочно-полиномиальным.
43
Разобьем отрезок [a, b] на n частей
[ x0 , x1 ], [ x1 , x2 ],..., [ xn1 , xn ]; x0 a, xn b .
Обозначим это разбиение через . Назовем сплайном S m ( f , x) порядка m функцию, являющуюся многочленом степени m на каждом
из отрезков [ xi 1 , xi ]
S m ( f , x) Pim ( x) ai 0 ai1 x ... aim x m при x [ xi 1 , xi ]
и удовлетворяющую условиям непрерывности производных до порядка m 1 во внутренних точках x1 , x 2 ,..., x n1
k
Pim
( xi ) Pik1, m ( xi ), k 0,1,..., m 1; i 1,2,..., n 1,
и условиям совпадения значений сплайна и функции во всех узлах
x0 , x1 , x2 ,..., xn1 , xn
Pim ( xi ) yi , i 0,1,..., n .
В этой задаче необходимо определить m 1 коэффициент для
каждого из n уравнений, то есть, всего n(m 1) коэффициентов
aij , i 1,2,...,n; j 0,1,...,m . Условия непрерывности дают (n 1)m
уравнений, условия совпадения – n 1 уравнение: всего имеем
n(m 1) m 1 уравнений. Остальные m 1 уравнений выбираются
исходя из некоторых дополнительных условий.
И так, сплайном называется функция, которая вместе с несколькими производными непрерывна на заданном отрезке [a, b] , а на каждом частичном отрезке [ xi 1 , xi ] является некоторым алгебраическим
многочленом. Максимальная по всем отрезкам степень многочленов
называется степенью сплайна, а разность между степенью сплайна и
порядком наивысшей непрерывной производной на [a, b] называется
дефектом. Сплайн, который принимает в узлах те же значения, что и
функция f (x) называется интерполяционным. На практике широко
используются сплайны третьей степени – S 3 ( x) . Такие сплайны называются кубическими.
44
2 Построение кубического сплайна
Для кубического сплайна число коэффициентов равно 4 n , а общее
число условий – 4n 2 . Два недостающих условия выберем позже.
Рассмотрим
промежуток
и
пусть
[ xi , xi 1 ]
x xi
, w 1 w . Когда x пробегает этот интервал,
hi
то w изменяется от 0 до 1, а w от 1 до 0. Будем искать представление
сплайна на этом интервале в виде
hi xi 1 xi , w
Pi ( x) wyi1 w yi hi2 (w3 w) i1 (w 3 w) i ,
(3.1)
где i и i1 – некоторые константы, которые еще предстоит определить. Первые два члена этого выражения соответствуют обычной линейной интерполяции, а взятый в скобки член является кубической
поправкой, которая обеспечивает дополнительную гладкость. Заметим,
что поправочный член обращается в нуль на концах интервала, так что
Pi ( xi ) yi , Pi ( xi 1 ) yi 1 .
Отсюда видно, что условия совпадения уже выполнены. Из этого равенства путем замены i на i 1 получаем Pi 1 ( xi 1 ) yi 1 . Отсюда и
из второго равенства получаем непрерывность в узлах сплайна. Таким
образом, условия совпадения и непрерывность сплайна заложены в
самом выборе формулы.
Дифференцируем равенство (3.1) трижды как сложную функцию
1
1
от x , учитывая, что w
и w
, получим следующие выраhi
hi
жения для производных
yi 1 yi
hi (3w 2 1) i 1 (3w 2 1) i ,
(3.2)
hi
6( i 1 i )
(3.3)
Pi ( x) 6w i 1 w i , Pi ( x)
.
hi
Из первого равенства в (3.3) имеем Pi ( xi ) 6 i и Pi ( xi 1 ) 6 i 1 .
Отсюда получаем непрерывность второй производной в узлах. РавенPi ( x)
45
Pi ( xi )
поясняет смысл коэффициента i , но не позволяет
6
вычислить его значение, так как Pi ( xi ) не задано.
ство i
yi 1 yi
. Тогда имеют место следуюhi
щие равенства для односторонних производных
Введем обозначение: d i
Pi ( xi ) d i hi ( i 1 2 i ), Pi ( xi 1 ) d i hi (2 i 1 i ) . (3.4)
Приходится временно писать односторонние производные, так как
функция Pi (x) определена только на [ xi , xi 1 ] . Заменяя во втором равенстве в (3.4) i на i 1 получаем
Pi 1 ( xi ) d i 1 hi 1 (2 i i 1 ) .
По условию Pi ( xi ) Pi 1 ( xi ) или
di hi ( i 1 2 i ) di 1 hi 1 (2 i i 1 ) ,
и
hi 1 i 1 2(hi 1 hi ) i hi i 1 d i d i 1 , i 1,2,..., n 1 .
(3.5)
Это система из n 1 линейных уравнений относительно неизвестных коэффициентов i , i 0,1,2,..., n . Нужно указать еще два условия,
чтобы однозначно определить сплайн. Среди многих различных способов выбора этих условий возьмем следующий.
Пусть c0 ( x) и cn (x) единственные кубические кривые, которые
проходят соответственно через четыре первые и четыре последние из
заданных точек. В качестве условий возьмем следующие совпадения
третьих производных
P0 ( x0 ) c0 и Pn1 ( x0 ) cn .
Так как кубический многочлен интерполируется точно на четырех
точках, то c 0 ( x) и c n (x) являются интерполяционными многочленами. Из представления их в форме Ньютона легко получить
c0( x) 6c0 ( x0 , x1 , x2 , x3 ) и cn ( x) 6cn ( xn3 , xn2 , xn1 , xn ) .
46
Обозначим
для
краткости
d 03 6c0 ( x0 , x1 , x2 , x3 )
записи
6cn ( xn3 , xn2 , xn1 , xn ) .
0
d 03
Итак, потребуем, чтобы 1
h0
и
d n33
и
n n 1
hn1
d n33 . Для
симметрии, умножим последние равенства соответственно на h02 и
hn21 , что дает
h0 0 h0 1 h02 d 03 ,
hn1 n1 hn1 n hn21d n31 .
Для сплайна с этими граничными условиями коэффициенты i удовлетворяют следующей системе из n 1 линейных уравнений с n 1
неизвестным
h0
h0
...
0
0
...
0
0 0 h02 d 03
...
0
0 1 d1 d 0
...
...
... ...
...
.
... 2(hn2 hn1 ) hn2 n1 d n1 d n2
...
hn2
hn2 n hn21d n33
h0
0
2(h0 h1 ) h0
...
...
0
0
0
0
Решая ее методом Гаусса, приведем исходную матрицу к верхней треугольной форме
0
0
0
...
0
0
h0
1
0
...
0
0
0
h1
2
...
0
0
0
0
h2
...
0
0
0 0 0
0 1 1
0 2 2
,
... ... ...
hn 1 n 1 n 1
n n n
...
0
...
0
...
0
... ...
... n 1
... ...
где диагональные элементы i вычисляются по формулам
0 h0 ; i 2(hi 1 hi )
n hn 1
47
hi21
i 1
hn21
n 1
,
, i 1,2,..., n 1;
(3.6)
а правые части i определяются из соотношений
0 h02 d 03 ;
i (d i d i 1 )
hi 1 i 1
, i 1,2,..., n 1;
i 1
h
n hn21 d n33 n 1 n 1 .
n 1
(3.7)
Коэффициенты i определяются при обратном ходе метода Гаусса
n
n
hi i 1
, i i
, i n 1, n 2,...,1,0 .
n
i
(3.8)
Лекция 2 Способы задания кубических сплайнов
1 О способах задания сплайнов.
2 Типы граничных условий.
3 О погрешности приближения сплайнами.
1 О способах задания сплайнов
Не вдаваясь в подробности вывода формул, приведем несколько
способов задания сплайнов.
1. Положим, что ki S3 ( xi ) . Тогда определяя наклоны k i по фор-
f i 1 f i 1
4 f f2 3 f0
, i 1,2,..., n 1 ,
k0 1
,
2h
2h
3 f f n2 4 f n1
ba
kn n
, где h
, кубический сплайн можно за2h
n
писать в виде
мулам
S3 ( x)
ki
( xi 1 x) 2 (2( x xi ) h)
( x xi ) 2 (2( xi 1 x) h)
f
f i 1
i
h3
h3
(3.9)
( xi 1 x) 2 ( x xi )
( x xi ) 2 ( x xi 1 )
ki
ki 1 .
h2
h2
2. Если известны значения производной f i , то полагаем k i f i .
Затем сплайн записывается в форме (3.9).
Первый и второй способы являются локальными и гарантируют
непрерывность первой производной сплайна S 3 ( x) в узлах x i .
48
3. Будем строить сплайн S 3 ( x) так, чтобы выполнялись условия
а) S3 ( x) C 2 (a, b) ;
в) на каждом из отрезков сплайн является многочленом третьей
степени;
с) в узлах выполняются равенства S3 ( xi ) f ( xi ), i 0,1,...,n .
Будем искать сплайн на отрезке [ xi 1 , xi ] в виде
S i ( x) ai bi ( x xi )
ci
d
( x xi ) 2 i ( x xi ) 3 .
2
6
(3.10)
Из условия с) следует, что
ai Si ( xi ), bi Si ( xi ), ci Si( xi ), d i Si( xi ) .
Условия с) обеспечивают равенства a0 f 0 , ai f i . Из условия непрерывности а) функции получим S i ( xi ) S i 1 ( xi ) , что приводит к
уравнению
f i f i 1 hibi
hi2
h3
ci i di , i 1,2,..., n .
2
6
(3.11)
Из условия непрерывности первой производной S i ( x i ) S i 1 ( x i )
имеем
d
ci hi i hi2 bi bi 1 , i 2,3,..., n .
(3.12)
2
Из условия непрерывности второй производной S i( xi ) S i1 ( xi ) вытекает
(3.13)
d i hi ci ci 1 , i 2,3,..., n .
Следовательно, имеем систему (3.11) – (3.13) из 3n 2 уравнений относительно 3n неизвестных. Дополняя эту систему условиями на границе, получим систему из 3n уравнений.
2 Типы граничных условий
Рассмотрим различные типы граничных условий.
1. Пусть заданы значения f 0 и f n . Из уравнений (3.11) – (3.13)
получается система
49
c0
hi ci 1 2(hi hi 1 )ci hi 1ci 1 6
cn
f 0
f i 1 f i f i f i 1
, i 1,2,..., n .(3.14)
hi 1
hi
f n
Эта система имеет диагональное преобладание и может быть эффективна решена методом трехточечной прогонки. Затем определяются
остальные неизвестные
di
ci ci1
h
h2
f f i1
.
, bi i ci i di i
hi
2
6
hi
2. Если на границе заданы значения первых производных b0 и bn ,
то систему (3.11) – (3.13) можно привести к виду
1
h
h
2
1
2
bi bi 1 6 i ( f i 1 f i ) i 1 ( f i f i 1 ) ,
bi 1 4
hi
h
h
h
h
h
i 1
i
i
i
i 1
i 1,2,..., n 1;
b0 f 0 , bn f n .
(3.15)
Эта система также эффективно может быть решена методом прогонки. Если эти граничные условия использовать при решении системы (3.14), то ее нужно дополнить уравнениями
2
1
2 f f0
c0 c1 1
f 0 ,
3
3
h1 h1
f f n 1
1
2
2
.
cn 1 cn f n n
3
3
hn
hn
(3.16)
3. Если на границе заданы значения только функции f 0 и f n , то
можно решить систему (3.15) с дополнительными условиями
b0
bn
1
(11 f 0 18 f1 9 f 2 2 f 3 ) ,
6h
1
(11 f n 18 f n 1 9 f n 2 2 f n 3 ) .
6h
50
(3.17)
4. Пусть f (x) периодическая функция с периодом b a , тогда
следует считать, что f 0 f n , S3 (a) S 3 (b), S 3(a) S3(b) . Если использовать систему (3.15), то ее нужно дополнить условиями
b0 bn ,
f1 f 0 f n 1 f 0
1
1
(2b0 b1 )
(2b0 bn 1 ) .
3h1
3hn
h12
hn2
(3.18)
Для равномерной сетки из (3.18) получим уравнение
3( f1 f n 1)
h
b1 4b0 bn 1 .
Если использовать систему (3.14), то ее можно дополнить краевыми
условиями
c0 cn ,
f f n f n f n 1
.
c1h1 2(hn h1 )cn cn 1hn 6 1
hn
h1
(3.19)
Для равномерной сетки из (3.19) получим уравнение
c1 4c n c n 1
6
h2
( f1 2 f n f n 1 ) .
После решения системы (3.14) или (3.15) кубический сплайн можно сразу записать в явном виде (3.9) или в виде
S 3 ( x) ci 1
( x i x) 3
( x xi 1 ) 3
c h2 x x
ci
( f i 1 i 1 i ) i
6hi
6hi
6
hi
( fi
ci hi2 x xi 1
)
.
6
hi
(3.20)
3 О погрешности приближения сплайнами
Следующая теорема дает ответ о погрешности приближения
сплайнами.
Теорема 4. Если f ( x) C k 1[a, b], 0 k 3 , то интерполяционный
сплайн S 3 ( x) , построенный способами 2 или 3, удовлетворяет неравенству
51
max | f (m) ( x) S 3 ( x) | ch k 1m max | f (k 1) ( x) | ,
[ xi , xi 1 ]
[ a,b]
где i 0,1,..., n 1, m 0,1,..., k , с – не зависящая от h, i, f постоянная.
Если f ( x) C 4 [a, b], то можно получить c 1 . Если сплайн S 3 ( x)
построен по способу 1, то данная теорема справедлива при 0 k 2 .
Тема 4 СРЕДНЕКВАДРАТИЧНЫЕ ПРИБЛИЖЕНИЯ
Лекция 1 Точечная квадратичная аппроксимация функций
1 Постановка задачи.
2 Теорема об элементе наилучшего среднеквадратичного приближения.
3 Точечная квадратичная аппроксимация.
1 Постановка задачи
Пусть R пространство функций f (x) интегрируемых с квадратом
на отрезке [a, b] . Скалярным произведением функций f (x) и (x)
b
называется выражение ( f , ) f ( x) ( x)dx . Нормой элемента f
a
называется число
f
2
b
f 2 ( x)dx . Если ( f , ) 0 , то говорят, что
a
функции f (x) и (x) ортогональны. Пространство с такими свойствами обозначается L2 [a, b] .
При аппроксимации функции f (x) из некоторого класса R функциями (x) из некоторого более узкого класса H в качестве критерия
точности приближения часто принимается величина среднеквадратичb
ного
отклонения
S 2 R( x) f ( x) ( x) 2 dx
или
a
n
S 2 R( xi ) f ( xi ) ( xi ) 2 , где R(x) – неотрицательная весовая
i 0
функция. Указанный критерий близости f (x) и (x) естественен,
когда требуется лишь «интегральная» близость функций. Кроме того,
52
практика показывает, что приближающие функции, построенные по
методу среднеквадратичного приближения, гораздо лучше описывают
реальную функцию f (x) , чем интерполяционные многочлены.
Пусть подпространство H состоит из линейных комбинаций n 1
линейно независимой функции 0 , 2 ,..., n
c0 0 c11 ... cn n .
Это подпространство называется подпространством обобщенных
многочленов по системе функций { ( xi )} .
2 Теорема об элементе наилучшего среднеквадратичного приближения
Теорема 5. Для того чтобы элемент ( x) H был элементом
наилучшего среднеквадратичного приближения, необходимо и достаточно, чтобы скалярное произведение ( f , ) 0 для любого элемента H .
Доказательство. Необходимость. Пусть существует такой элемент 1 , что ( f , 1 ) a 0 . Без нарушения общности можно считать, что 1 1 . Возьмем элемент 2 a1 . Тогда имеем
f 2
2
( f 2 , f 2 ) ( f a1 , f a1 )
( f , f ) a(1 , f ) a( f , 1 ) a 2 (1 , 1 )
f
2
2a 2 a 2 f
Отсюда следует f 2
2
2
a2 .
2
f , что невозможно, так как является элементом наилучшего приближения.
Достаточность. Пусть ( x) H . Тогда
f
f
2
2
( f , f )
( , f ) ( f , )
Если , то получим f
2
2
2
f
2
2
f для произвольного H ,
то есть – элемент наилучшего среднеквадратичного приближения в
подпространстве H . Теорема доказана.
53
.
3 Точечная квадратичная аппроксимация
Пусть на отрезке [a, b] задана система точек x0 , x1 , x2 ,..., xn1 , xn .
При точечном квадратичном аппроксимировании за меру отклонения
полинома Pm ( x) a0 a1 x ... am x m от функции y f (x) на данном
множестве точек берут величину
n
S Pm ( xi ) f ( xi ) 2 ,
(4.1)
i 0
которая называется квадратичным отклонением.
Полином Pm (x) следует строить таким образом, чтобы величина
этого отклонения была минимальной. Если m n , то в качестве Pm (x)
можно взять интерполяционный полином Лагранжа Ln (x) , так как для
него величина среднеквадратичного отклонения равна нулю
n
S 2 ( f ( xi ) Ln ( xi )) 2 0 .
i 0
Если m n , то для минимизации S необходимо решить систему
S
0, i 0,1,..., m .
ai
Перепишем эту систему в виде
n
2
2
(a0 a1 xi a2 xi ... am xi yi ) 1 0
i 0
.......... .......... .......... .......... .......... .......
n
2
2
k
(a0 a1 xi a2 xi ... am xi yi ) xi 0
i 0
.......... .......... .......... .......... .......... ........
n
2
2
m
(a0 a1 xi a2 xi ... am xi yi ) xi 0 .
i 0
Обозначим
n
sk xik , k 0,1,..., 2m;
i 0
n
t k xik yi , k 0,1,..., m .
i 0
Тогда систему (4.2) можно записать в виде
54
(4.2)
a0 s0 a1s1 a2 s2 ... am sm t0
.......... .......... .......... .......... .......... .......
a0 sk a1sk 1 a2 sk 2 ... am sk m t k
.......... .......... .......... .......... .......... .......
a0 sm a1sm 1 a2 sm 2 ... am s2m t m .
(4.3)
Если среди точек x i нет совпадающих, то определитель системы (4.3)
отличен от нуля. Полином с коэффициентами a i , определенными из
(4.3), будет обладать минимальным отклонением. Вычислим, например, определитель системы (4.3), когда m 1 . Тогда det s0 s2 s12 .
2
n
n
Учитывая неравенство Коши-Буняковского xi xi2 (n 1) ,
i 0
i 0
для
попарно
различных
узлов
получим
xi ,
2
n
det (n 1) xi 0 . Отметим, что матрица системы (4.3)
i 0
i 0
положительно определена, и для ее решения можно использовать метод Зейделя или метод простой итерации.
n
xi2
Лекция 2 Метод ортогональных полиномов
1 Метод ортогональных полиномов.
2 Интегральная квадратичная аппроксимация функций.
3 Примеры ортогональных систем.
1 Метод ортогональных полиномов
Две функции (x) и (x) называются ортогональными на множестве
X {x0 , x1 , x2 ,..., xn1 , xn } , если
( xi ) ( xi ) 0 .
Система
X
функций { ( xi )} ортогональна на множестве X , если все функции
этой системы попарно ортогональны.
Рассмотрим
систему
ортогональных
полиномов
P0 ( x), P1 ( x),..., Pm ( x) на множестве X , таких, что
55
n
Pj ( xi ) Pk ( xi ) 0
i 0
n
для всех j k , и пусть s j Pj2 ( xi ) 0 . Так как полиномы P j (x )
i 0
линейно независимы, то произвольный многочлен Qm (x) можно представить в виде
Qm ( x) b0 P0 ( x) b1 P1 ( x) ... bm Pm ( x) .
(4.4)
Коэффициенты bi в разложении (4.4) определяются следующим образом. Умножим (4.4) на Pk ( x), k m и просуммируем полученное выражение по множеству X , получим
n
m
n
n
i 0
r
i 0
i 0
Qm ( xi ) Pk ( xi ) br Pr ( xi ) Pk ( xi ) bk Pk2 ( xi ) .
n
Откуда bk
Qm ( xi ) Pk ( xi )
i 0
n
i 0
.
Pk2 ( xi )
Вернемся к задаче, поставленной в лекции 1 (тема 4). Полином
Qm (x) доставляющий минимум квадратичному отклонению S на
множестве X , будем искать в виде (4.4). Тогда
n
S (b0 P0 ( xi ) b1P1 ( xi ) ... bm Pm ( xi ) yi ) 2
n
i 0
m
m 1
{ b 2j Pj2 ( xi ) 2
i 0 j 0
m
k 0 j k 1
m
n
j 0
i 0
m
b j bk Pj ( xi ) Pk ( xi ) 2 b j Pj ( xi ) y j yi2 }
j 0
(b 2j s j 2b j c j ) yi2 ,
n
n
i 0
i 0
где s j Pj2 ( xi ) , c j Pj ( xi ) yi .
Выделим в последнем выражении полный квадрат
S
m
s j (b j
j 0
2
n
ci 2 m c j
)
yi2 .
sj
j 0 s j
i 0
56
Ясно, что минимальное значение S принимает тогда, когда
n
m
c
s j (b j s i ) 2 0
j 0
или b j
cj
sj
j
Pj ( x i ) y i
i 0
n
i 0
.
Pj2 ( xi )
Таким образом, искомый полином Qm (x) имеет вид
Qm ( x)
m
cj
s
j 0
Pj ( x ) .
(4.5)
j
Величину квадратичного отклонения полинома Qm (x) можно вычислить по формуле
n
m c2
j
S y i2
.
(4.6)
j 0
j 0 s j
2 Интегральная квадратичная аппроксимация функций
Функцию f ( x) L2 можно приближать с помощью обобщенного
полинома P(x) вида
P( x) c00 ( x) c11 ( x) ... cmm ( x) ,
(4.7)
b
так, чтобы величина J m (c0 , c1 ,..., cm ) [ P( x) f ( x)] 2 dx принимала
a
минимальное значение.
Система интегрируемых функций { i ( x)} называется ортогоb
нальной на отрезке [a, b] , если ( i , k ) i ( x) k ( x)dx 0 для всех
a
i k . Величина
m ( m , m
1
)2
называется евклидовой нормой
функции m (x) . Если m 1 для любого m , то система функций
{ i ( x)} называется ортонормированной.
57
Пусть в (4.7) система { i ( x)} ортогональна. Определим коэффициенты разложения c i из условия
J m
,
c j
j 0,1,..., m . Дифференцируя
J m , получим систему
m
1 J m
ci ( i , j ) ( f , j ) 0,
2 c j i 0
j 0,1,..., m .
(4.8)
Учитывая ортогональность системы { i ( x)} , вычислим коэффициенты
ci
ci
( f ,i ) ( f ,i )
.
2
( i , i )
i
b
Если система { i ( x)} ортонормированна, то ci f ( x) i ( x)dx . Коэфa
фициенты c i называются коэффициентами Фурье функции f (x)
относительно заданной ортогональной системы { i ( x)} i 0,1,..., m .
Покажем, что коэффициенты Фурье доставляют минимум функции
J m . Составим второй дифференциал
m
2Jm
i 0
ci2
d 2Jm
Так как
2Jm
2( i , j ) 0 , получим
c j ci
m
d 2Jm
2Jm
2
i 0 ci
Если
m
dci2 0 , то
i 0
2Jm
dc j dci .
j i c j ci
dci2 2
m
dci2 2 i dci2 .
2
i 0
d 2 J m 0 и, следовательно, коэффициенты c i до-
ставляют минимум J m .
Таким образом, обобщенный полином P(x) с коэффициентами
Фурье имеет наименьшее квадратичное отклонение от функции f (x)
по сравнению с другими обобщенными полиномами того же порядка.
Вычислим величину этого отклонения.
58
b
m
a
i 0
b
m
m
i 0
i 0
J m [ f ( x) c i i ( x)] 2 dx [ f 2 ( x) 2 c i i ( x) f ( x) c i2 i2 ( x)]dx
a
b
m
b
a
i 0
a
[ f 2 ( x) c i2 i2 ( x)dx .
Отсюда получаем J m f
2
m
ci2 i ( x)
2
0.
i 0
3 Примеры ортогональных систем
1. Тригонометрическая система 1, sin x, cos x, sin 2x, cos2x,...,
sin nx, cosnx,... ортогональна на любом отрезке длиной 2 . Пусть
f (x) – непрерывная 2 периодическая функция. Рассмотрим тригонометрический многочлен
P( x)
n
a0
(a k cos kx bk sin kx) .
2 k 1
(4.9)
Чтобы квадратичное отклонение P(x) от f (x) было минимальным,
коэффициенты a0 , ak , bk должны быть коэффициентами Фурье относительно тригонометрической системы
ak
1
f ( x) sin kxdx, bk
1
f ( x) cos kxdx .
Если функция f (x) имеет сложный вид, то для приближенного вычисления коэффициентов Фурье можно использовать формулу трапеций.
Для приближения на интервале (l , l ) периодической функции с
периодом 2l удобно использовать ортогональную систему функций
kx
kx
1
, sin
, cos
. Обобщенным многочленом наилучшего приблиl
l
2
жения будет тригонометрический ряд Фурье
P( x)
где a k
n
a0
kx
kx
(a k cos
bk sin
),
2 k 1
l
l
1l
kx
1l
kx
f
(
x
)
sin
dx
,
b
f ( x) cos
dx .
k
l l
l
l l
l
59
(4.10)
Если же функция f (x) задана на интервале (0, l ) , то коэффициенты в
(4.10) имеют вид
ak
2l
kx
2l
kx
f ( x) sin
dx, bk f ( x) cos
dx .
l 0
l
l 0
l
2. Ортогональными на отрезке [-1,1] являются полиномы Лежандра
dn
2
2
( x 2 1) n . Можно показать, что Ln ( x)
. По2n 1
2 n n! dx n
линомы Лежандра удобно вычислять по рекуррентной формуле
(n 1) Ln1 ( x) x(2n 1) Ln ( x) nLn1 ( x) 0 .
Ln ( x )
1
Многочленом наилучшего среднеквадратичного приближения на
отрезке [-1,1] будет Pn ( x)
n
c k Lk ( x ) ,
k 0
здесь
ck
2n 1 1
f ( x) Lk ( x)dx .
2 1
(4.11)
3. Систему многочленов, ортогональных на множестве точек
m (1) n C k C k
m m k ( k )
{0,1,2,3,..., n} образуют многочлены Pm,n ( x)
x ,
(k )
n
k 0
где x (k ) x( x 1) ... ( x k 1), n (k ) n(n 1) ... (n k 1) . Многочлены Pm,n ( x) определяются рекуррентным соотношением
n
(m 1)( n m)
m(n m 1)
( x ) Pm, n ( x)
Pm 1, n ( x)
Pm 1, n ( x) 0, m 1 .
2
2(2m 1)
2(2m 1)
x x0
, где h xi 1 xi всякая
h
произвольная система равноотстоящих точек x0 , x1 , x2 ,..., xn1 , xn приводится к системе 0,1,2,3,…, n , то многочлены Pm,n ( x) можно использовать для среднеквадратичной аппроксимации функции на произвольной системе равноотстоящих точек.
Так как путем линейной замены q
60
Лекция 3 Метод наименьших квадратов
1 Метод наименьших квадратов.
2 Обработка результатов наблюдений.
3 Пример применения метода наименьших квадратов.
1 Метод наименьших квадратов
Пусть даны узлы x0 , x1 ,..., xn1 , xn не обязательно различные и известны значения функции f (x) в этих узлах y0 , y1 ,..., y n1 , y n . Заметим, что при xi x j равенство yi y j необязательно. Это может быть
в том случае, когда y i являются экспериментальными данными, то
есть получаются в результате многократных измерений одной и той же
величины в одной точке. Необходимо подобрать такую функцию (x)
степени m n для которой величина
S2
n
inf
H [ a ,b ]
f ( yi ( xi )) 2
i 0
имела бы наименьшее значение. Таким образом, имеем частный случай
среднеквадратичного приближения, который называется методом
наименьших квадратов.
Пусть функции 0 ( x), 1 ( x),..., m ( x) образуют линейно независимую систему. Тогда, если многочлен
m
( x) c0 0 ( x) c11 ( x) ... cm m ( x) c j j ( x)
(4.12)
j 0
является многочленом наилучшего приближения для f ( x) H , то,
согласно теореме 5, должно быть
m
m
n
j 0
j 0
i 0
c j ( j ( x), k ( x)) c j j ( xi ) k ( xi ) ( f , k ),
k 0,1,..., m . (4.13)
Необходимо определить коэффициенты c j . Введем обозначения
n
n
i 0
i 0
s jk j ( xi ) k ( xi ), rk f ( xi ) k ( xi ),
Тогда система (4.13) примет вид
61
j , k 0,1,..., m . (4.14)
c0 s00 c1s10 ... cm sm0 r0
c s c s ... c s r
0 01 1 11
m m1
1
..........
..........
..........
.......
c0 s0 m c1s1m ... cm smm rm .
(4.15)
Определитель этой системы как определитель Грамма системы линейно независимых элементов 0 ( x), 1 ( x),..., m ( x) положителен, а значит, коэффициенты c0 , c1 ,..., cm находятся единственным образом.
Рассмотрим приближения по методу наименьших квадратов алгебраическими многочленами. В качестве линейно независимой системы
{ k ( x)} возьмем функции: 1, x, x 2 ,..., x m . Тогда
( x) c0 c1 x c2 x 2 ... cm x m
(4.16)
и коэффициенты из (4.14) вычисляются следующим образом
n
n
n
n
i 0
i 0
n
i 0
n
i 0
s00 0 ( xi ) 0 ( xi ) 1 n 1; s10 1 ( xi ) 0 ( xi ) xi ;
(4.17)
r0 f ( xi ) 0 ( xi ) yi .
i 0
i 0
Остальные коэффициенты вычисляются аналогично. Теперь система
(4.15) для определения коэффициентов c0 , c1 ,..., cm будет иметь вид
n
n
n
n
c0 (n 1) c1 xi xi2 ... cm xim yi
i 0
i 0
i 0
i 0
n
n
n
n
n
2
3
m 1
c0 xi c1 xi xi ... cm xi yi xi
(4.18)
i 0
i 0
i 0
i 0
i 0
.......... .......... .......... .......... .......... .......... .......... ...
n
n
n
n
n
c0 xim c1 xim 1 xim 2 ... cm xi2 m yi xim .
i 0
i 0
i 0
i 0
i 0
2 Обработка результатов наблюдений
Пусть в результате наблюдений получена таблица значений функции f (x) для значений аргумента x0 , x1 ,..., xn1 , xn . Будем предполагать, что значения аргумента найдены точно, а значения функции
f ( xi ) содержат случайные ошибки. С целью уменьшения случайных
62
ошибок и получения более плавного течения функции f (x) применяют процесс сглаживания, состоящий в том, что наблюдаемые значения f ( xi ) заменяют значениями f ( xi ) , полученными в процессе вычислений, зависящих от выбранного способа сглаживания.
Рассмотрим способ сглаживания, основанный на методе наименьших квадратов, предполагая, что значения x0 , x1 ,..., xn1 , xn равноотстоящие. Для того чтобы найти сглаженное значение f ( xi ) , выбирают
k 1 значений аргумента из заданных n 1 значений, так чтобы x i по
возможности находилось посередине. По наблюдаемым значениям
функции в этих точках методом наименьших квадратов строят многочлен степени m k , приближающий функцию f (x) , и за значение
f ( xi ) принимают значение этого многочлена в точке x i .
Для практического использования можно заранее найти выражение
f ( xi ) через наблюдаемые значения f ( xi ) при заданных m и k . Часто
выбирают k четным, а m – нечетным. В этом случае точка x i будет
являться средней из точек, по которым строится приближающий многочлен. Приведем несколько таких выражений, где вместо f ( xi ) будем писать f i
m 1 ; k 2;
k 4;
k 6;
1
f ( xi ) ( f i 1 f i f i 1 )
3
1
f ( xi ) ( f i 2 f i 1 f i f i 1 f i 2 )
5
1
( f i 3 f i 2 f i 1 f i f i 1 f i 2 f i 3 )
7
m 3 k 4;
1
f ( xi )
(3 f i 2 12 f i 1 17 f i 12 f i 1 3 f i 2 )
35
k 6;
1
f ( xi ) (2 f i 3 3 f i 2 6 f i 1 7 f i 6 f i 1 3 f i 2 2 f i 3 )
21
k 8;
f ( xi )
63
f ( xi )
1
(21 f i 4 14 f i 3 3 f i 2 54 f i 1 59 f i 54 f i 1
231
39 f i 2 14 f i 3 21 f i 4 ) .
3 Пример применения метода наименьших квадратов
Пример. Для функции sin x на отрезке [1,1] найти среди многочленов степени не выше 3 многочлен, дающий наилучшее приближение по методу наименьших квадратов, если используются значения
функции в точках x i : -1; -0.5; 0; 0.5; 1.
Решение. В нашем случае m 3 и n 4 . Многочлен ищем в виде
(4.16) ( x) c0 c1 x c2 x 2 ... cm x m . Для нахождения коэффициентов c0 , c1 , c 2 ,..., cm составляем систему (4.18), в которой коэффициенты
рассчитываются по формулам (4.17)
s00 5; s01 s10 0; s02 s11 s20 2,5
s03 s12 s21 s30 0; s13 s22 s31 2,125
s23 s32 0; s33 2,03125 ;
r0 0; r1 1; r2 0; r3 0,25 .
Таким образом, система (4.18) принимает вид
5c0 2.5c2 0
2.5c1 2.125 c3 1
2
.5c0 2.125 c2 0
2.125 c1 2.03125 c3 0.25 .
8
8
Решением ее являются c0 c2 0, c1 , c3 . И искомый мно3
3
гочлен принимает следующий вид
8
3
( x) ( x x 3 ) .
Замечание. Метод наименьших квадратов имеет два существенных недостатка:
1. Для отыскания коэффициентов многочлена приходиться решать систему из m 1 уравнений, что при больших m достаточно затруднительно.
64
2. Если выбрали m и построили многочлен наилучшего приближения, и, оказалось, что точность приближения недостаточна
то, увеличив m , придется заново повторять все вычисления.
Тема 5 ПРИБЛИЖЕННОЕ ВЫЧИСЛЕНИЕ
ИНТЕГРАЛОВ
Лекция 1 Интерполяционные квадратурные правила
1 O форме, придаваемой интегралу при вычислениях.
2 Квадратурная сумма и связанные с ней задачи.
3 Общая квадратурная формула.
4 Теорема о точности квадратурной формулы.
1 O форме, придаваемой интегралу при вычислениях
Пусть [a, b] – любой отрезок числовой оси, и рассматривается инb
теграл
F ( x)dx .
Ставится задача: найти его приближённое значение
a
по n значениям F ( xi ) функции F в точках x i (i 1,2,..., n) . Формулы
для вычисления интегралов называют квадратурными.
Многие правила приближённых квадратур основаны на замене
интегрируемой функции F на всём отрезке [a, b] или на его частях на
более простую функцию , близкую к F , легко интегрируемую точно
и принимающую в узлах x i те же значения F ( xi ) , что и F . В качестве
такой функции берут алгебраический или тригонометрический многочлен, либо дробно-рациональную функцию.
Когда отрезок интегрирования конечный и интегрируемая функция
F имеет высокую гладкость, то можно рассчитывать хорошо приблизить её многочленом невысокой степени. Если же сама функция F или
её производные невысоких порядков имеют особенности или даже обращаются в , то это затруднит приближение F или сделает его вообще невозможным. В этом случае мы должны будем заранее освободиться от таких особенностей путём их выделения. Делается это при
помощи разложения F на два сомножителя F ( x) p( x) f ( x) , где p(x)
65
имеет такие же особенности, как и F (x) , а f (x) – есть достаточно
b
гладкая функция, и интеграл рассматривается в форме
p( x) f ( x)dx .
a
Такое же представление применяется и при вычислении несоб
ственных интегралов вида
F ( x)dx . Причём,
F целесообразно разло-
a
жить на множители F ( x) p( x) f ( x) , из которых первый p(x) характеризует закон убывания F при x , а f (x) – является гладкой
функцией, допускающей хорошее приближение алгебраическими многочленами или рациональными функциями.
Функция p(x) называется весовой функцией или весом. При построении определённого квадратурного правила она считается фиксированной.
2 Квадратурная сумма и связанные с ней задачи
Будем строить приближённые формулы вычислений вида
b
n
a
k 1
p( x) f ( x)dx Ak f ( x k ) ,
x k [ a , b] .
(5.1)
Числа Ak называются квадратурными коэффициентами, x k – квадратурными узлами, а правая часть формулы – квадратурной суммой.
2n 1 параметров:
Формула (5.1) содержит
n, Ak , xk
(k 1,2,..., n) . Их следует выбирать так, чтобы (5.1) давала, возможно,
лучший результат при интегрировании избранного класса функций f .
Роль n – очевидна: чем больше n , тем больше слагаемых в квадратурной сумме, и тем большей точности можно достичь путём выбора
Ak и x k . Поэтому при построении формулы число n считают фиксированным и рассматривают задачу о выборе Ak и x k . В различных
квадратурных методах одно из множеств: либо множество коэффициентов Ak , либо множество узлов x k также может быть зафиксированным. Правом выбора их обычно пользуются для следующих целей.
1. Увеличение степени точности
Говорят, что квадратурная формула (5.1) имеет степень точности
m , если она является точной для функций g i (x) (i 1,2,..., m) , т.е.
66
b
n
a
k 1
p( x) g i ( x)dx Ak g i ( x k )
и не является точной для g m1 ( x) .
Можно стремиться к тому, чтобы при помощи выбора параметров Ak
и x k сделать степень точности формулы (5.1) наивысшей возможной.
Такие формулы впервые были рассмотрены Гауссом и их часто называют формулами наивысшей степени точности.
2. Минимизация погрешности
Остаточный член формулы (5.1) имеет вид
b
n
a
k 1
R n ( f ) p( x) f ( x)dx Ak f ( x k ) .
(5.2)
За величину, характеризующую точность формулы на множестве F
функций f может быть принята
sup | Rn ( f ) | M ( A1 ,..., A1 ; x1 ,..., x n ) .
f
Путём выбора узлов x k и коэффициентов Ak можно добиться, чтобы
величина M имела бы наименьшее значение.
3. Упрощение вычислений
Можно при помощи выбора параметров Ak и x k стремиться сделать, возможно, более простыми вычисления по формуле (5.1), например, взять равноотстоящими узлы, или взять равные коэффициенты.
3 Общая квадратурная формула
Предположим, что узлы x k (k 1,2,..., n) выбраны, и мы можем
при построении квадратурной формулы (5.1) выбирать лишь коэффициенты Ak . Выполним интерполирование f (x) по её значениям в узлах x k при помощи интерполяционного многочлена Лагранжа степени
n 1
f ( x) L n ( x) r ( x) ,
( x)
f ( x k ),
(
x
x
k 1
k ) ( x k )
n
где Ln ( x)
67
( x) ( x x1 )...( x x n ) .
Тогда
b
b
b
a
a
p( x) f ( x)dx p( x) Ln ( x)dx p( x)r ( x)dx .
a
(5.3)
Будем считать, что
b
b
b
( x)
f ( x k )dx
k 1 ( x x k ) ( x k )
n
p( x) f ( x)dx p( x) Ln ( x)dx p( x)
a
a
a
n
p( x) ( x)
dx Ak f ( x k ) .
( x x k ) ( x k )
k 1
a
b
n
f ( x k )
k 1
Таким образом, интерполяционная квадратурная формула принимает
вид
b
n
a
k 1
b
p( x) f ( x)dx Ak f ( x k ),
Ak p( x)
a
( x)
dx . (5.4)
( x x k ) ( x k )
Ее погрешность (5.2) определяется следующим образом
b
n
b
a
k 1
a
Rn ( f ) p( x) f ( x)dx Ak f ( x k ) p( x)r ( x)dx .
(5.5)
4 Теорема о точности квадратурной формулы
Интерполяционная формула (5.4) характеризуется следующей теоремой о степени точности.
Теорема 6. Для того чтобы квадратурная формула (5.4) была точной для алгебраических многочленов степени n 1 , необходимо и достаточно, чтобы она была интерполяционной.
Доказательство.
Необходимость.
Возьмём
функцию
( x)
f ( x)
k ( x) . Это есть многочлен степени n 1 , и
( x x k ) ( x k )
если формула (5.4) верна для любых многочленов степени n 1 , то она
должна быть точной и для k (x) . Поэтому верны равенства
b
a
b
p( x) k ( x)dx p( x)
a
n
( x)
dx Ai k ( x i ) Ak ,
( x x k ) ( x k )
i 1
так как, k ( xi ) 0, i k , k ( x k ) 1 , и формула (5.4) действительно
является интерполяционной, так как её коэффициенты имеют значения, указанные в (5.4).
68
Достаточность. Пусть f – любой многочлен степени n 1 . Убедимся в том, что для него равенство (5.4) будет выполняться точно.
Интерполируем f по значениям в узлах x k (k 1,2,..., n) . Интерполирование будет точным
( x)
f (xk ) .
k 1 ( x x k ) ( x k )
n
f ( x)
Кроме того, если Ak имеют значения, указанные в (5.4), то верны равенства
b
n
p( x) ( x)
dx Ak f ( x k ) ,
( x x k ) ( x k )
k 1
a
b
n
p( x) f ( x)dx f ( x k )
k 1
a
и равенство (5.4) для f (x) выполняется точно. Теорема доказана.
Теперь остановимся на оценке погрешности. Если функция f (x)
имеет непрерывную производную порядка n на [a, b] , то на отрезке,
содержащем точки x1 , x 2 ,..., x n , x , существует точка такая, что
( x)
f ( n ) ( ) .
n!
Тогда для (5.4) Rn ( f ) имеет место следующее выражение
r ( x)
Rn ( f )
Если же | f
квадратуры
( n)
1b
p( x) ( x) f
n! a
(n)
( )dx .
( x) | M n , x [a, b] , то имеем оценку погрешности
| Rn ( f ) |
b
1
M n | p( x) ( x) | dx .
n!
a
(5.5)
Лекция 2 Квадратурные формулы для равноотстоящих узлов
1 Формулы Ньютона-Котеса.
2 Простейшие формулы Ньютона-Котеса.
1 Формулы Ньютона-Котеса
В вычислениях часто узлы x k берутся равноотстоящими. Построим интерполяционные квадратурные формулы, считая, что на отрезке
69
[a, b] задано n 1 равноотстоящих узлов x k , таких, что x 0 a ,
x k x k 1 h ,
q
xn b
и
h
ba
. Введем новую переменную
n
x x0
. Тогда многочлен Лагранжа примет вид
h
Ln ( x)
(1) nk q(q 1)...( q n)
k!(n k )! (q k ) f ( x k ) .
k 0
n
Подставим это выражение в (5.3), получим
b
p( x) f ( x)dx
a
(1) n k h n
q(q 1)...( q n)
dq f ( x k ) Rn ( f ) .
k!(n k )! p(a qh)
qk
k 0
0
n
Полученную формулу перепишем в виде
b
n
p( x) f ( x)dx (b a) Bk f ( x k ) ,
n
(5.6)
k 0
a
где
Bkn
(1) n k h
q(q 1)...( q n)
p(a qh)
dq .
nk!(n k )! 0
qk
n
(5.7)
Квадратурные правила (5.6) называют формулами НьютонаКотеса, а коэффициенты (5.7) – коэффициентами Ньютона-Котеса.
Для постоянной весовой функции p( x) 1 формула НьютонаКотеса имеет вид
b
n
f ( x)dx (b a) Bk f ( x k ) ,
n
(5.8)
k 0
a
а коэффициенты Bkn определяются по формулам
Bkn
(1) n k h n q(q 1)...( q n)
dq .
nk! (n k )! 0
qk
(5.9)
Нетрудно видеть, что для коэффициентов Bkn справедливы соотношения
n
Bkn 1
k 0
и Bkn Bnnk , например, последнее легко показыва-
ется с помощью замены q t n .
70
Коэффициенты Bkn вычислены до n 20 . Однако для больших
значений n формулы Ньютона-Котеса не применяются, так как с ростом n все значительнее сказывается неустранимая и вычислительная
погрешность. В следующей таблице приведем некоторые значения коэффициентов Bkn .
Таблица 5.1 Значение коэффициентов
k
0
1
2
3
4
Знаменатель
n
1
1
2
2
1
4
6
3
1
3
8
4
7
32
12
90
5
19
75
50
288
6
41
216
27
272
840
7
751
3577
1323
2989
17280
8
989
5888
-928
10496
-4540
28350
Например, B 25
50
.
288
Замечание. Формула (5.9) имеет степень точности n , если число
узлов её n 1 – является чётным, и степень n 1 , если число узлов её
n 1 – является нечётным.
2 Простейшие формулы Ньютона-Котеса
Для повышения точности интегрирования отрезок [a, b] часто делят на несколько частей, затем применяют избранную квадратурную
формулу к каждой отдельной части и результаты складывают. Этот
метод является общим, и им можно пользоваться при применении всякой квадратурной формулы. Для многих формул интерполяционных
квадратур погрешность Rn ( f ) зависит от величин отрезка интегрирования следующим образом
Rn ( f ) (b a) k C(a, b) ,
(5.10)
где C (a, b) – медленно изменяющаяся функция от a до b и k N .
Такая зависимость показывает, что если мы уменьшим отрезок интегрирования в m раз, то Rn ( f ) при этом уменьшится приблизительно в
m k раз. Для вычисления интеграла по всему отрезку [a, b] разделим
71
его на m равных частей и вычислим при помощи выбранной формулы
интегралы по всем частичным отрезкам. В каждом случае погрешность
будет приблизительно в m k раз меньше, чем (5.10). При сложении
всех таких интегралов получится результат, погрешность которого будет приблизительно в m k 1 раз меньше, чем погрешность (5.10), когда
формула применяется для вычисления интеграла по всему отрезку
[a, b] . Если k 1 , то произойдёт уменьшение погрешности тем больше, чем больше k . Описанный способ увеличения точности применим
сейчас к простейшим формулам Ньютона-Котеса.
Формула прямоугольников
В случае n 0 функция f (x) на отрезке [a, b] заменяется интерполяционным многочленом нулевого порядка, построенным по значеab
ниям f (x) в средней точке x
, т.е. функцией на отрезке
2
ab
P( x) f (
) [a, b] . Таким образом,
2
b
ab
(5.11)
f ( x)dx (b a) f ( 2 ) R( f ) .
a
y=f(x)
y
f((a+b)/2)
f(b)
f(a)
0
ab
2
a
b
x
То есть, площадь криволинейной
трапеции заменяется площадью
прямоугольника.
Если f (x) на отрезке [a, b] имеет
производную второго порядка, то
по теореме Тейлора получим
ab
ab
ab
f ( x) f (
) (x
) f (
)
2
2
2
(x
ab 2
)
2
f ( ( x)) .
2
Интегрируя последнее выражение, получим
b
f ( x)dx (b a) f (
a
ab 1 b
ab 2
) (x
) f ( ( x)) dx ,
2
2a
2
откуда следует, что
72
R( f )
1b
ab 2
(x
) f ( ( x)) dx .
2 a
2
Применяя теорему о среднем значении, получим
R( f )
b
(x
2
a
(b a) 3
ab 2
) dx
,
2
24
где inf f ( x) sup f ( x) или же, погрешность можно записать в
x
x
(b a)
f ( ) , где a b .
24
Далее, разобьём отрезок [a, b] на n
3
виде R( f )
равных частей длины
ba
и, применяя формулу (5.11) к каждому отрезку, просуммируn
ем результаты по всем отрезкам, получим окончательную формулу
прямоугольников
h
b
f ( x)dx
a
ba
n
(2n 1)h
h
3h
) R , (5.12)
f (a 2 ) f (a 2 ) ... f (a
2
где погрешность окончательно определяется формулой
R( f )
(b a) 3
24 n 2
f ( ) .
(5.13)
Формула трапеций
Пусть n 1 , тогда линейное интерполирование выполняется по
двум значениям f (a ) и f (b) , принимаемым функцией f (x) на концах a и b . Квадратурная формула (5.8), с учетом коэффициентов из
таблицы, будет иметь вид
b
f ( x)dx
a
ba
[ f (a) f (b) ] .
2
Это формула трапеций.
73
(5.14)
y
y=f(x)
f(b)
f(a)
0
Погрешность
ее,
в
виду
и
( x) ( x a)( x b)
p( x) 1
определяется по формуле
a
b
Rn ( f )
x
1b
p( x) ( x) f
n! a
( n)
( )dx
1b
( x a )( x b ) f
2 a
( 2)
( )dx .
Если f (x) – непрерывная функция на [a, b] , и так как множитель
( x a)( x b) сохраняет знак на [a, b] , то по теореме о среднем, существует на [a, b] такая точка , что
( x a)( x b)
(b a) 3
dx
f ( ), [a, b] .
2!
12
a
b
R2 ( f ) f ( )
(5.15)
Для увеличения точности формулы трапеций (5.14), разделим отba
резок [a, b] на n равных частей длины h
. Рассмотрим частичn
ный отрезок [ a kh, a (k 1)h ] . Для него получим
a ( k 1) h
f ( x)dx
a kh
h
( f k f k 1 ) Rk ,
2
f k f (a kh) ,
и согласно (5.15)
Rk
h3
f ( k ),
12
a kh k a (k 1)h .
y
Сумма интегралов по всем частичным отрезкам даёт общую квадратурную формулу трапеций
y=f(x)
f0
0
a
f1
a+h
f2
a+2h x
74
b
f ( x)dx
a
ba 1
1
[ f 0 f 1 f 2 ... f n 1 f n ] R ,
n 2
2
(5.16)
где
h3
[ f (0 ) f (1 ) ... f ( n 1 ) ]
12
(b a)3 f (0 ) f (1 ) ... f ( n 1 )
, a kh k a (k 1)h .
n
12 n 2
R R0 R1 ... Rn 1
f ( 0 ) f (1 ) ... f ( n 1 )
есть среднее арифметическое
n
из значений второй производной. Считая ее непрерывной функцией на
[a, b] , мы можем выбрать такую точку [a, b] , что
Величина
f ( 0 ) f (1 ) ... f ( n 1 )
f ( ) ,
n
а значит,
R
(b a) 3
12 n 2
f ( ), [a, b] .
(5.17)
Формула парабол
Пусть n 2 и интерполируется функция f (x) по трём точкам a ,
ab
c , b в которых известны её значения. Интерполирующий мно2
гочлен имеет вторую степень и его графиком является парабола. Квадратурная формула парабол имеет вид
b
f ( x)dx
a
ba
[ f (a) 4 f (c) f (b) ] .
6
y
y=f(x)
f(c)
f(a)
0
a
с
f(b)
b
x
(5.18)
Это формула парабол. Она называется также формулой Симпсона.
Формула точна для функции
f ( x) ( x c) 3 , так как левая и правая части формулы (5.18) тождественно равны нулю, а значит, она
точна и для любого многочлена
третьей степени.
75
Для нахождения погрешности формулы (5.18) рассмотрим многочлен P3 ( x) третьей степени, удовлетворяющий условиям
P3 (a) f (a),
P3 (c) f (c),
P3 (c) f (c),
P3 (b) f (b) .
Многочлен P3 ( x) интерполирует f (x) по двум однократным узлам a
и b и одному двукратному узлу c
f ( x) P3 ( x) r ( x) .
Так как для P3 ( x) формула Симпсона является точной, то
b
b
b
f ( x)dx P3 ( x)dx r ( x)dx
a
a
a
b
ba
[ P3 (a) 4 P3 (c) P3 (b) ] r ( x)dx
6
a
b
ba
[ f (a) 4 f (c) f (b) ] r ( x)dx .
6
a
Погрешность формулы Симпсона имеет вид
b
R( f ) r ( x)dx .
a
Если считать, что f (x) имеет на отрезке [a, b] непрерывную производную четвёртого порядка, то из представления остаточного члена
r (x) интерполирования с кратными узлами, имеем
r ( x)
1
( x a)( x c) 2 ( x b) f
4!
( 4)
( ),
a x, b .
Поэтому
R( f )
1 b
( x a)( x c) 2 ( x b) f
24 a
( 4)
( )dx .
Так как множитель ( x a)(x c) 2 ( x b) не изменяет знак на отрезке
[a, b] и f (4) ( x) – непрерывная функция на отрезке [a, b] , то по теореме о среднем существует такая точка , что
R( f )
f
( ) b
1 ba
( x a)( x c) 2 ( x b)dx
f
24 a
90 2
5
( 4)
76
( 4)
( ) . (5.19)
Далее, разделим [a, b] на чётное число n равных частей длины
ba
и
возьмём
сдвоенный
частичный
отрезок
n
[a (k 1)h, a (k 1)h ] . Тогда, учитывая, что f k f (a kh) , имеем
h
a ( k 1) h
f ( x)dx
a ( k 1) h
h
( f k 1 4 f k f k 1 ) Rk .
3
Просуммировав по всем
[a 2h, a 4h],... , получим,
b
f ( x)dx
a
сдвоенным
отрезкам
[ a, a 2h ] ,
ba
[ f 0 f n 2( f 2 f 4 ... f n2 ) 4( f1 f 3 ... f n1 ) ] R( f ) ,
3n
и
R( f )
1 5
h [f
90
( 4)
(1 ) f
( 4)
( 3 ) ... f
( 4)
( n 1 ) ] .
Если функция f (4) ( x) непрерывна на отрезке [a, b] , то существует такая точка , что
2
[f
n
( 4)
(1 ) f
( 4)
( 3 ) ... f
( 4)
( n 1 ) ] f
( 4)
( )
и для погрешности R( f ) получим выражение
R( f )
(b a ) 5
180 n
4
f
( 4)
( ),
a b.
(5.20)
Формула «трёх восьмых»
При n 3 для построения формулы Ньютона-Котеса интерполирование функции f (x) выполняется по её значениям в четырёх точках
H
2H
, a
, b ( H b a) . Формула «трёх восьмых» или
3
3
формула Ньютона будет следующей
a, a
b
1
3
f ( x)dx H [ 8 f (a) 8 f (a
a
H
3
2H
1
) f (a
) f (b) ] .
3
8
3
8
77
(5.21)
Её степень точности равна трём.
Проделав рассуждения немного сложнее, чем в случае формулы
Симпсона, получим следующий вид погрешности
R( f )
(b a) 5
f
6480
( 4)
( ),
a b .
(5.22)
Далее, пусть n кратно трём. Разделим отрезок [a, b] на n равных чаba
. Возьмём отрезок длины 3h : [a kh, a (k 3)h]
n
и к нему применим формулу (5.21)
стей длины h
a ( k 3) h
f ( x)dx
a kh
3h
{ f (a kh) 3 f (a (k 1)h) 3 f (a (k 2)h)
8
f (a (k 3)h)} Rk 1 ( f ) ,
и
R( f )
(3h) 5
f
6480
( 4)
( k 1 ) .
Просуммировав по всем тройным отрезкам, получим следующую общую формулу «трёх восьмых»
b
f ( x)dx
a
3h
{ f 0 f n 2( f 3 f 6 ... f n 3 )
8
(5.23)
3( f1 f 2 f 4 f 5 ... f n 2 f n 1 )} R( f ) ,
где f k f (a kh) и погрешность
R( f ) R1 ( f ) R 2 ( f ) ... R n ( f )
3
(b a) 5 3
[f
80 n 4 n
( 4)
(1 ) ... f
( 4)
(3h) 5
[f
6480
( n ) ]
3
( 4)
(1 ) ... f
(b a) 5
80 n 4
( 4)
( n ) ]
3
f ( ),
a b.
Заметим, что в случае, когда число узлов кратно 6, лучше применять формулу Симпсона, чем формулу «трёх восьмых», так как в первом случае погрешность меньше (определяется путём сравнения).
78
Лекция 3 Квадратурные формулы наивысшей алгебраической
степени точности
1 Постановка задачи.
2 Квадратурная формула Гаусса.
3 Остаточный член формулы Гаусса.
1 Постановка задачи
Будем строить квадратурные формулы интерполяционного типа,
имеющие при заданном числе узлов n наивысшую алгебраическую
степень точности, т.е. будем находить узлы и коэффициенты квадратурных формул из условия, что их остаточные члены обращаются в
нуль для всех многочленов максимально высокой степени.
Итак, имеем задачу: на отрезке [a, b] выбрать узлы xi , i 1,2,.., n
и определить коэффициенты Ai таким образом, чтобы квадратурное
правило
b
n
a
i 1
p( x) f ( x)dx Ai f ( xi )
(5.24)
было точным для всех многочленов наивысшей возможной степени m .
При построении квадратурной формулы будем считать, что весовая
функция p (x) удовлетворяет условиям
b
i
| p( x) x | dx q,
i 0,
a
b
и
| p( x) | dx 0 .
a
В правиле (5.24) 2 n неизвестных Ai , xi , i 1,2,.., n , поэтому следует ожидать, что при надлежащем выборе узлов и квадратурных коэффициентов оно будет точным для всех многочленов степени
m 2n 1 .
Теорема 7. Для того чтобы квадратурное правило (5.24) было точным для всех многочленов степени не выше 2n 1 , необходимо и достаточно выполнение условий
1. Правило (5.24) должно быть интерполяционным, то есть, коэффициенты вычисляться по формулам:
b
Ak p( x)
a
( x)
dx .
( x x k ) ( x k )
79
(5.25)
2. Многочлен ( x) ( x x1 )( x x 2 )...( x x n ) должен быть ортогонален на отрезке [a, b] по весу p (x) ко всякому многочлену Q (x) степени меньше n
b
p( x) ( x)Q( x)dx 0 .
(5.26)
a
Доказательство. Необходимость первого условия следует из теоремы 6. Покажем необходимость второго условия. Пусть Q (x) произвольный многочлен степени меньше n . Возьмем f ( x) ( x)Q( x) .
Этот многочлен степени не больше 2n 1 и правило для него должно
быть точным. Но так как f ( xi ) 0 для всех значений i , то, следовательно, равенство (5.26) выполняется.
Достаточность. Пусть f (x) произвольный многочлен степени не
больше 2n 1 . Представим его в виде f ( x) ( x)Q( x) r ( x) , где Q (x)
и r (x) многочлены степени меньше n . Ясно, что f ( xi ) r ( xi ) . Тогда
b
b
b
n
n
a
a
a
i 1
i 1
p( x) f ( x)dx p( x) ( x)Q( x)dx p( x)r ( x)dx Ai r ( xi ) Ai f ( xi ) .
Теорема доказана.
Итак, задача о построении квадратурного правила (5.24) сводится к
задаче об отыскании многочлена (x) , который обладает свойством 2
(равенство (5.26)). Покажем, что такой многочлен существует, все его
корни действительны, различны и принадлежат отрезку [a, b] .
Теорема 8. Если весовая функция p (x) не меняет знак на отрезке
[a, b] , то существует и притом единственный многочлен (x) ортогональный на [a, b] по весу p (x) ко всякому многочлену степени меньше n .
Доказательство.
Будем
искать
многочлен
в
виде
( x) x n a1 x n1 ... a n1 x a n . Из условия ортогональности для
определения коэффициентов a i получим систему n уравнений
p( x)x
b
n
a1 x n 1 ... a n 1 x a n x i dx 0,
a
80
i 0,1,..., n 1 .
Достаточно показать, что соответствующая однородная система имеет
лишь нулевое решение
p( x)a1 x
b
n 1
... a n 1 x a n x i dx 0,
i 0,1,..., n 1 .
a
Умножим последовательно каждое уравнение на a n , a n 1 , ..., a1 и просуммируем. В результате получим уравнение
p( x)a1 x
b
n 1
a 2 x n 2 ... a n 1 x a n
2
dx 0 .
a
В силу того, что p (x) не меняет знак на [a, b] , то последнее равенство
возможно лишь тогда, когда все ai 0 . Теорема доказана.
Теорема 9. Если p (x) не меняет знак на отрезке [a, b] и многочлен (x) ортогонален на [a, b] ко всякому многочлену Q (x) степени
меньше n , то все корни (x) действительны, различны и лежат внутри [a, b] .
Доказательство. Пусть 1 , 2 , ... , m – корни, которые лежат внутри [a, b] и имеет нечетную кратность. Допустим, что m n . Построим
многочлен ( x) ( x 1 )( x 2 )...( x m ) . Для него должно выполняться равенство
b
p( x) ( x) ( x)dx 0 .
a
С другой стороны, многочлен ( x) ( x) содержит только четные степени и поэтому
b
p( x) ( x) ( x)dx 0 .
a
Значит, m n . Теорема доказана.
Таким образом, квадратурное правило наивысшей алгебраической
степени точности (5.24) существует при любом n и является единственным. Можно показать, что ни при каком выборе узлов x i и коэффициентов Ai ,
i 1,2,..., n квадратурное правило не будет точным
81
для всех многочленов степени 2 n . Если p( x) 0 и квадратурное правило является точным для всех многочленов степени 2n 2 , то все
квадратурные
коэффициенты
Действительно,
если
Ai 0 .
2
( x)
f ( x)
, то
x xi
b
p( x) f ( x)dx Ai ( xi )
2
. Откуда получаем
a
2
( x)
Ai p( x)
dx 0 .
( x x i ) ( x i )
a
b
2 Квадратурная формула Гаусса
Квадратурные формулы наивысшей алгебраической степени точности для случая p( x) 1 впервые построил Гаусс. Поэтому и для любого p (x) подобные формулы называют формулами Гаусса.
Построим квадратурное правило, когда p( x) 1 . Введем обозначения
x
x
x
0
0
0
( x)dx 1 ( x), 1 ( x)dx 2 ( x), ... , n1 ( x)dx n ( x) .
b
Рассмотрим интеграл ( x)q ( x)dx , где q(x) многочлен степени не
a
выше n 1 . Применяя формулу интегрирования по частям, учитывая
(5.26), получим
b
x
b
a
0
a
0 ( x)q( x)dx ( x)dxq( x) | ba 1 ( x)q( x)dx ...
1 ( x)q( x) 2 ( x)q (1) ( x) 3 ( x)q ( 2) ( x) ... (1) n 1n ( x)q ( n 1) ( x)
b
a
.
При x a правая часть уравнения обращается в нуль, так как
i (a) 0 . Поэтому в силу произвольности q(x) справедливы равенства
1 (b) 2 (b) ... n (b) 0 .
Следовательно, n (x) имеет корни кратности n при x a и x b и
может быть записана в виде
82
n ( x) C( x a) n ( x b) n ,
где C – постоянная.
Отсюда для (x) получим
( x) C
dn
dx n
[( x a ) n ( x b) n ] .
Постоянная С подбирается из условия, что коэффициент при x n в
(x) равен 1. Чтобы определить величину этого коэффициента, вычислим
(2n)! n
d n 2n
x 2n(2n 1)( 2n 2)...( n 1) x n
x .
n
n!
dx
Следовательно, C
n!
.
(2n)!
Итак, получаем
( x)
n! d n
[( x a) n ( x b) n ] .
(2n)! dx n
(5.27)
Последовательное применение теоремы Ролля показывает, что все
корни уравнения ( x) 0 , действительны, различны и принадлежат
интервалу [a, b] . Таким образом, их действительно можно использовать в качестве узлов интерполяции и полученная при этом формула
численного интегрирования будет удовлетворять поставленным условиям.
3 Остаточный член формулы Гаусса
Пусть f (x) – произвольная, достаточное количество раз дифференцируемая функция. Построим интерполяционный многочлен Эрмита H (x) , такой что H ( xi ) f ( xi ) и H ( xi ) f ( xi ) , причём
x1 , x 2 , ..., x n – корни уравнения ( x) 0 .
Тогда
f ( x) H ( x) ( x x1 ) 2 ( x x 2 ) 2 ...(x x n ) 2 f ( x; x1 , x1 ; x 2 , x 2 ;...;x n , x n ) .
Многочлен H (x) имеет степень 2n 1 . Проинтегрируем с весом
p (x) левую и правую части последнего выражения
83
b
b
a
a
f ( x) p( x) p( x) H ( x)dx
b
p( x) 2 ( x) f ( x; x1 , x1 ; x 2 , x 2 ;...; x n , x n )dx
a
n
Ai H ( x i )
i 1
n
Ai f ( x i )
i 1
b
p( x)
2
( x) f ( x; x1 , x1 ; x 2 , x 2 ;...; x n , x n )dx
2
( x) f ( x; x1 , x1 ; x 2 , x 2 ;...; x n , x n )dx .
a
b
p( x)
a
Таким образом, остаточный член будет иметь вид
b
R( f ) p( x) 2 ( x) f ( x; x1 , x1 ; x 2 , x 2 ;...; x n , x n )dx .
a
p( x) 2 ( x)
Так как
не меняет знака на отрезке [a, b] , узлы
x1 , x 2 , ..., x n [a, b] и f (x) имеет на [a, b] непрерывную производную
порядка n , то на отрезке [a, b] существует такая точка , для которой
верно равенство f ( x1 , x 2 ,..., x n )
1
f
n!
(n)
( ) . Следовательно, погреш-
ность R( f ) будет
b
R( f ) f ( ; x1 , x1 ;... x n , x n ) p( x) 2 ( x)dx
a
f
( ) b
p( x) 2 ( x)dx ,
(2n)! a
( 2n)
где , [a, b] .
При p( x) 1 выражение для R( f ) можно упростить, интегрируя по
частям
b
b
b
a
a
( x) ( x)dx 1 ( x) ( x)dx 2 ( x) ( x)dx ...
a
b
b
a
a
(1) n n ( x) ( n) ( x)dx (1) n n! n ( x)dx .
Применяя снова последовательное интегрирование по частям, получим
84
b
b
n!
n ( x)dx (2n)! ( x a)
a
(1) n
n
( x b) n dx
a
n 1
n! n ( x a) ( x b) n 1
dx ...
(2n)! a
n 1
b
(n! ) 2 b ( x a) 2 n
(1) n (n! ) 3 (b a) 2n 1
.
dx
(2n)! a (n 1)... 2n
[( 2n)! ] 2 (2n 1)
Итак, при p( x) 1 погрешность R( f ) принимает вид
R( f ) (1) n n!(1) n
(n! ) 3 (b a) 2 n 1 f
[( 2n)! ] (2n 1)
2
( )
=
(2n)!
( 2n)
2 n 1
(b a)
(n! )4 ( 2n)
f
( ) .
[( 2n)! ]3 (2n 1)
(5.28)
Лекция 4 Коэффициенты формул Гаусса.
1 Коэффициенты формул Гаусса.
2 Некоторые составные формулы.
3 Квадратурные формулы с равными коэффициентами.
1 Коэффициенты формул Гаусса
Найдём теперь выражения для коэффициентов при f ( xi ) в формуле (5.24). Для этого рассмотрим функцию
k ( x)
( x)
.
x xk
Квадрат этой функции является многочленом степени 2n 2 . Следовательно,
b
p( x) k
a
2
n
( x)dx Ai k 2 ( xi ) Ak k 2 ( x k ) .
i 1
Отсюда,
85
b
b
p( x) k ( x)dx p( x) k ( x)dx
2
Ak
2
a
k2 ( x k
)
a
.
2 (xk )
(5.29)
Заметим, что все коэффициенты Ak – положительные.
При p( x) 1 получим более удобные выражения для коэффициентов Ak , путём интегрирования по частям
b
k
2 ( x)
dx
2
( x xk )
a ( x xk )
2 ( x)
b
2
( x)dx
a
2
2 (a)
a xk
2 (b)
b xk
b
2
a
b
b
a
2
a
( x) ( x)
x xk
( x) ( x)
x xk
dx
dx .
Подсчитаем значения 2 (a) и 2 (b) . По формуле Лейбница из (5.27)
имеем
( x)
n! d n
n [( x a) n ( x b) n ]
(2n)! dx
n! n k d k
d nk
Cn k [( x a) n ] n k [( x b) n ] .
(2n)! k 0 dx
dx
Отсюда,
(a)
n!
(n!) 2
n!(a b) n (1) n
(b a) n ,
(2n)!
(2n)!
(b)
Функция
( x) ( x)
x xk
b
2
a
является многочленом степени 2n 2 . Поэтому
( x) ( x)
x xk
(n! ) 2
(b a) n .
(2n)!
n
( xi ) ( xi )
i 1
xi x k
dx 2 Ai
Из (5.29) следует
86
2 Ak 2 ( x k ) .
2
2
(n!) 2 (b a) 2 n (n!) 2 (b a ) 2 n
Ak 2 ( xk ) (1) n
2 Ak 2 ( xk ) .
(
2
n
)!
a
x
(
2
n
)!
b
x
k
k
Таким образом, коэффициенты Ak при известных значениях x k могут
быть вычислены по формуле
Ak
(n! ) 4 (b a) 2n 1
[( 2n)! ] 2 ( x k a)(b x k ) 2 ( x k )
.
(5.30)
Нетрудно показать, что все корни (x) расположены симметрично
ab
, так, что для всякой точки x k
2
найдется симметричная ей точка x nk 1 и, следовательно, Ak Ank 1 ,
то есть коэффициенты при f ( x k ) и f ( x n k 1 ) совпадают.
Корни x k и коэффициенты Ak можно вычислить для фиксированного отрезка [1,1] . Любой отрезок [a, b] путем замены
относительно средней точки
1
[(b a)t b a] приводится к отрезку [1,1] . Запишем квадратур2
ное правило (5.24) для отрезка [1,1]
x
1
n
1
k 1
2 2n 1 (n!) 4
f ( x)dx Ak f ( xk ) [( 2n)! ]3 (2n 1)
f ( 2n) ( ) .
(5.31)
Тогда для общего отрезка [a, b] получим
b
f ( x)dx
1
f(
1
a
ab ba ba
t)
dt
2
2
2
ba
ab ba
ba
Ak f ( 2 2 tk ) ( 2 ) 2n 1 R( f ) .
2 k 1
n
(5.32)
Выпишем значение узлов x k , коэффициентов Ak и погрешностей
R( f ) для нескольких первых значений n
n 1,
x1 0, A1 2, R1 ( f )
1
f ( );
3
87
n 2,
x 2 x1 0.5773502692 , A1 A2 1, R 2 ( f )
n 3,
x 2 0, x 3 x1 0.7745966692 , A2
R2 ( f )
1
f
15750
(6)
1
f
135
( 4)
( );
8
5
, A1 A3 ,
9
9
( );
n 4,
x3 x 2 0.3399810436 , x 4 x1 0.8611363116 ,
1
A2 A3 0.6521451549 , A 1 A 4 0.3478548451 , R2 ( f )
f (8) ( ) .
3472875
Из приведенных значений видно, что с ростом n знаменатель в
выражении для погрешности растет очень быстро. Поэтому для n 4
квадратурная формула Гаусса имеет высокую точность.
Отметим, что
n
Ai
1,
i 1
Ai 0 для любого i и, следовательно, с
ростом n коэффициенты Ai остаются ограниченными величинами.
Это обстоятельство выгодно отличает квадратуры Гаусса от формул
Ньютона-Котеса.
2 Некоторые составные формулы
На практике с целью повышения точности счета можно использоba
вать составные формулы для небольших значений n . Если h
и
m
формуле для вычисления интеграла на частичном промежутке положить
a ( k 1) h
f ( x)dx
a kh
1
1
1
h
f (a (k 2 )h 2 ht) 2 dt
1
1
1
h 2n 1 (n!) 4
h Ai f (a (k )h hti )
f ( 2n) ( i ) ,
3
2
2
[( 2n)! ] (2n 1)
i 1
n
то получим
b
n
m 1
a
i 1
k 0
1
f ( x)dx h Ai f (a (k 2 )h
Для n 2 формула (5.33) примет вид
88
hti
h 2n 1 (n!) 4 f ( 2n) ( )
)
. (5.33)
2
[( 2n)! ]3 (2n 1)
h m 1
b
f ( x)dx 2 f (a h(k
k 0
a
1 t1
1 t1
)) f (a h(k
))
2
2
2 n 1
h
(n!) 4
f ( 2n) ( ), [a, b], t1 0.5773502692 .
[( 2n)! ]3 (2n 1)
Использование составной формулы Гаусса, например, при n 3
целесообразно для m 30 , так как в этом случае при одинаковом объеме вычислений она значительно точнее общей формулы Симпсона.
3 Квадратурные формулы с равными коэффициентами
Рассмотрим формулу квадратуры с одинаковыми коэффициентами
b
n
a
k 1
p( x) f ( x)dx cn f ( xk ) .
(5.34)
Которая называется формулой Чебышева. Эта формула содержит
n 1 параметр cn , xk (k 1, 2, ..., n) и их желательно выбирать так, чтобы квадратурная формула выполнялась точно для всех многочленов
степени n . Для этого достаточно, чтобы она выполнялась точно для x
от нулевой до n -ой, т.е.
b
n
a
k 1
i
i
p( x) x dx cn xk , i 0,1, ...,n .
(5.35)
Предположим, что произведение p( x) x i , ( i 0,1, ...,n ) абсолютно
b
интегрируемо на [a, b] , и пусть I 0 p( x)dx 0 .
a
Выясним возможность решения системы (5.35) относительно cn и
xk . Пусть i 0 , получим
b
p( x)dx cn n . Откуда cn
a
1b
p( x)dx . Поn a
лагая последовательно i 1, 2, ...,n , получим систему уравнений для
нахождения xk
89
b
s1 x1 x2 ... xn cn1 p( x) xdx cn1 1
a
b
s2 x12 x22 ... xn2 cn1 p( x) x 2 dx cn1 2
.
a
...
...
...
...
...
...
...
b
n
n
n
1
n
1
sn x1 x2 ... xn cn p( x) x dx cn n
a
(5.36)
Рассмотрим многочлен (x) , для которого xk являются корнями
( x) ( x x1 )...(x xn ) x n a1x n1 a2 x n2 ... an .
Из алгебры многочленов известны соотношения между коэффициентами многочлена a1 , ..., an и суммами степеней корней
s1 a1 0
s2 a1s1 2a2 0
s3 a1s2 a2 s1 3a3 0
.
...
...
...
...
sn a1sn 1 a2 sn 2 ... nan 0
(5.37)
Значения si ( i 1, 2, ...,n ) известны, с их помощью мы можем
единственным образом найти коэффициенты a i многочлена (x) . После этого решая уравнение ( x) 0 , найдём узлы xk квадратурной
формулы (5.34).
Однако заметим, что корни многочлена (x) могут оказаться комплексными или выходить за границы отрезка [a, b] . Вышеизложенное
позволяет сформулировать следующую теорему.
b
Теорема 10. Если
p( x)dx 0 ,
то квадратурная формула вида
a
(5.34) с действительными или комплексными узлами xk , точная для
любых алгебраических многочленов степени n , может быть построена, и при этом единственным образом, при всяких n 1, 2, ... .
Отметим, что если среди узлов xk есть комплексные, то квадратурная формула (5.34) может быть полезной лишь для интегрирования
функций f (x) , аналитических в области, содержащей внутри себя от90
резок [a, b] и все узлы xk . Поэтому для формул Чебышева особое значение имеет случай, когда узлы xk действительные и принадлежащие
отрезку [a, b] .
Пусть p( x) 1 и отрезок интегрирования приведён к [1,1] (отрезок [a, b] заменой x
гда
1
n
1
k 1
ba ba
t и сводится к отрезку [1,1] ). То2
2
f ( x)dx cn f ( xk ) . Коэффициент
11
2
cn dx . Так как
2 1
n
x i 1
x
dx
i 1
1
1
cn определяется из равенства
1
i
1
1 (1) i 1
, уравнения (5.36)
i 1
дадут для сумм степеней узлов xk значения
s1
n 1
n1
n1 2
n
1 (1) n 1 .
,
xdx
0
s
x dx , …, s n
2
2 n 1
2 1
2 1
3
Поэтому система (5.37) уравнений для коэффициентов ak многочлена (x) имеет вид
a1 0
n
2a2 0
3
a3 0
n n
a2 4a4 0 .
5 3
a5 0
n n
n
a 2 a 4 6 a6 0
7 5
3
.......... .......... .......... ..
При n 1 , ( x) x , так как x1 0 и c1 2 , поэтому
1
f ( x)dx 2 f (0) ,
1
( R1 ( f )
1
f ( )) .
3
Это есть формула прямоугольника с высотой, равной f (0) .
91
При n 2 , ( x ) x 2
1
1
1
, следовательно, x1
, x1
, и,
3
3
3
c2 1 , поэтому
1
f ( x)dx
1
1
f
3
1
1 ( 4)
, ( R2 ( f )
f ( )) .
f
135
3
Эта формула совпадает с формулой Гаусса для двух узлов. Приведём
таблицу узлов формулы Чебышева для n 1(1)9 с пятью значащими
цифрами
n 1 : x1 0 ;
n 2 : x2 x1 0,57735 ;
n 3 : x3 x1 0,70711 ; x2 0 ;
n 4 : x4 x1 0,79465 ; x3 x2 0,18759 ;
n 5 : x5 x1 0,83250 ; x4 x2 0,37454 ; x3 0 ;
n 6 : x5 x1 0,83250 ; x4 x2 0,37454 ; x3 0 ;
n 7 : x7 x1 0,88386 ; x6 x2 0,52966 ; x5 x3 0,32391 ; x4 0 ;
n 9 : x9 x1 0,91159 ; x8 x2 0,60102 ; x7 x3 0,52876 ;
x6 x4 0,16791 ; x5 0 .
При n 8 и n 10 среди xk – есть комплексные.
Эти формулы удобны при работе с чертежами, когда ординаты легко
считываются.
Лекция 5 Вычисление несобственных интегралов.
1 Мультипликативный способ.
2 Аддитивный способ.
3 Функции с несколькими особенностями.
1 Мультипликативный способ
b
Пусть необходимо вычислить
f ( x)dx , где функция
f (x) имеет
a
некоторые особенности на промежутке [a, b] . Рассмотрим два способа
выделения особенностей.
92
Представим подынтегральную функцию в виде f ( x) ( x) P( x) ,
где P( x) 0 на отрезке [a, b] , а функция (x) является гладкой функцией. Тогда, рассматривая P (x) как весовую функцию, для вычислеb
ния
f ( x)dx
можно использовать какое-либо квадратурное правило.
a
1
1
Например, пусть необходимо вычислить 1 x 4 dx . Возьмем
1
1
1
в качестве P( x) 1 x 2 и ( x) 1 x 2 . Используя квадра
турную формулу Гаусса, получим
1
4
1 x dx n
1
1
где x k cos(
n
k 1
1 x k2
1
,
(2k 1)
) – корни многочлена Чебышева Tn (x) , который
2n
ортогонален на отрезке [1,1] по весу P( x) 1 x 2
многочлену степени меньше n .
1
ко всякому
2 Аддитивный способ
Представим подынтегральную функцию в виде f ( x) ( x) ( x) ,
где (x) не имеет особенностей и является гладкой, а интеграл от
(x) может быть найден точными методами.
Пусть необходимо вычислить
2
ln sin xdx .
0
Считая, что ( x) ln
sin x
, а ( x) ln x , получим
x
2
ln xdx ( x ln x x) | 02
0
93
2
(ln
2
1) .
Интеграл от (x) можно вычислить, используя известные квадратурные формулы.
Рассмотрим некоторые приемы представления подынтегральной
функции в виде суммы.
Пусть f ( x) ( x c) ( x), 1, c [a, b] , а (x) – m кратно
непрерывно дифференцируемая функция. Представим f (x) в виде
f ( x) [ (c)( x c)
( x c) [ ( x) (c)
(1) (c)
1!
( k ) (c )
k!
(1) (c)
1!
( x c) 1
( 2 ) (c )
2!
( x c) 2 ...
( x c) k ]
( x c) ...
(k ) (c)
k!
( x c) k ],
km.
Первая скобка легко интегрируется. Вторая скобка обращается в нуль в
точке x c вместе с производными до k -го порядка включительно и
поэтому второе слагаемое не будет иметь особенностей.
3 Функции с несколькими особенностями
Описанным методом можно воспользоваться и тогда, когда функция имеет вид f ( x) ( x c) ln p ( x c) ( x) , где p – натуральное
число. Если функция имеет несколько особенностей, например,
f ( x) ( x c1 ) 1 ( x c 2 ) 2 ( x c3 ) 3 ...( x c k ) k ( x) , то, используя
описанный выше метод, можно сначала исключить особенность в точке c1
f ( x) ( x c1 ) 1 [a 0(1) a1(1) ( x c1 ) ... a k(1) ( x c1 ) k1 ] 1 ( x) ,
1
где функция 1 ( x) не имеет особенностей в точке c1 . Затем можно
исключить особенность у функции 1 ( x) в точке c 2 и так далее. Исключив особенности во всех точках, получим
b
a
b k kj
f ( x)dx a i( j ) ( x c j )
a j 1 i 0
j i
b
k ( x)dx ,
a
где k (x) не имеет особенностей на отрезке [a, b] .
94
Пусть f ( x) ( ( x)) , где (x) гладкая функция, принимающая в
точке x c [a, b] значение, при котором функция (x) имеет особенность. Представим функцию (x) в виде
( x) [ (c) (1) (c)(x c)] [ ( x) (c) (1) (c)(x c)] .
Тогда
f ( x) [ (c) (1) (c)(x c)] {[ ( x)] [ (c) (1) (c)(x c)]}.
Функцию [ (c) (1) (c)(x c)] часто оказывается возможным
проинтегрировать в конечном виде. Второе слагаемое в фигурных
скобках не имеет особенности в точке x c и соответствующий интеграл вычисляется методами численного интегрирования.
Лекция 6 Вычисление кратных интегралов
1 Метод повторного применения квадратурных формул.
2 Метод замены подынтегральной функции интерполяционным многочленом.
3 Практическое применение.
1 Метод повторного применения квадратурных формул
Пусть необходимо приближенно вычислить кратный интеграл
f ( x1, x2 ,..., xn )dx1dx2 ...dxn .
G
Рассмотрим несколько способов построения формул численного интегрирования вида
N
f ( x1, x2 ,..., xn )dx1dx2 ...dxn ci ( pi ) R( f ) .
(5.38)
i 1
G
Формулы (5.38) называются кубатурными формулами, а точки p i
называются узлами кубатурной формулы.
Для простоты изложения допустим, что область G – прямоугольник G {a x b, c y d} и нужно вычислить интеграл
95
bd
J f ( x, y )dxdy .
ac
b
d
a
c
Представим этот интеграл в виде J F ( x)dx , где F ( x) f ( x, y )dx .
b
Для вычисления J F ( x)dx воспользуемся квадратурной формулой
a
Симпсона
b
J F ( x)dx
a
ba
ab
F (a) 4 F (
) F (b) R1 ( F ( x)) , (5.39)
6
2
где
R1 ( F ( x))
(b a) 5 ( 4)
(b a) 5
F ( )
16 180
16 180
(b a) 5 (d c) 4 f ( , )
,
16 180
x 4
d
c
4 f ( , y )
x 4
dy
( a b, c d ) .
В свою очередь F (x) можно представить в виде
d
F ( x) f ( x, y )dx
c
d c
cd
f ( x, c) 4 f ( x,
) f ( x, d ) R y ( f ( x, y )) ,
6
2
(d c) 5 4 f ( x, )
. Подставляя выражение для
16 180
y 4
F (x) в (5.39), получим
R y ( f ( x, y ))
где
b
J F ( x)dx
a
16 f (
(b a )( d c)
cd
ab
[ f ( a, c ) 4 f ( a,
) f ( a, d ) 4 f (
, c)
36
2
2
ab cd
ab
cd
,
)4f (
, d ) f (b, c) 4 f (b,
) f (b, d )]
2
2
2
2
4 f (1 ,1 )
(b a)( d c)
4 f ( , )
[(b a) 4
( d c) 4
5
4
2 90
x
y 4
(b a) 4 (d c) 4 8 f ( 2 , 2 )
], (a i b, c i d ) .
25 90
x 4 y 4
96
(5.40)
Аналогично можно вычислить и интеграл более высокой кратности, причем по разным переменным можно использовать различные
квадратурные формулы.
2 Метод замены подынтегральной функции интерполяционным
многочленом
Заменим в интеграле J f ( x, y)dxdy функцию f ( x, y) интерG
поляционным многочленом вида
N
1, при i j
L( x, y ) f ( x i , y i ) Li ( x, y ) , где Li ( x i , y j )
.
0, при i j
i 1
После замены подынтегральной функции получим
J f ( x, y)dxdy L( x, y)dxdy R( f ( x, y)) dxdy
G
G
G
N
c i f ( x i , y i ) R ( f ( x, y )) , где ci Li ( x, y)dxdy .
i 1
G
Если область G – прямоугольник, на котором построена равноba
d c
, l
мерная сетка x i a ih, y j c j l , h
, тогда
n
m
n
m
L( x, y) f ( xi , y j )
i 0 j 0
n1 ( x) n1 ( y)
R( f ( x, y)) .
( x xi )( y y j ) n 1 ( xi ) n 1 ( y j )
Проводя интегрирование по формуле прямоугольника, получим
bd
n
m
f ( x, y)dxdy cij f ( xi , y j ) R ( f ( x, y)) ,
(5.41)
i 0 j 0
ac
где
d
n 1 ( x)
n 1 ( y)
dx
dy .
( x x i ) n 1 ( x i ) c ( y y j ) n 1 ( y j )
a
b
c ij
Следовательно, c ij (b a )( d c) Bin B mj , где Bin , B mj – коэффициенты
Ньютона-Котеса.
97
3 Практическое применение
На практике для вычисления кратных интегралов удобнее использовать формулы, дающие высокую точность при минимальном числе
узлов, например, формулы Гаусса. Возьмем в области G четыре узла
для квадратуры Гаусса
ab ba
ab ba
cd d c
cd d c
, x1
, y0
, y0
.
2
2
2
2
2 3
2 3
2 3
2 3
Тогда будем иметь
x0
bd
f ( x, y)dxdy
ac
(b a)( d c)
[ f ( x0 , y0 ) f ( x0 , y1 ) f ( x1 , y0 ) f ( x1 , y1 )] .
4
Погрешность этой формулы определится соотношением
R( f ( x, y))
(b a)( d c)
4 f ( , )
4 f (1 ,1 )
[ (b a) 4
( d c) 4
3
4
24 5
x
y 4
(b a) 4 (d c) 4 8 f ( 2 , 2 )
].
24 3 5
x 4y 4
(5.42)
Таким образом, остаток кубатурной формулы Гаусса, построенной
по четырем точкам, может оказаться меньше остатка кубатурной формулы Симпсона, построенной для девяти точек.
Лекция 7 Вероятностный метод
1 Метод Монте-Карло.
2 Повышение точности метода Монте-Карло.
3 Экстраполяция по Ричардсону.
1 Метод Монте-Карло (метод статистических испытаний)
Пусть необходимо в произвольной многомерной области G вычислить интеграл
U ( f ) f ( p)dp .
(5.43)
G
Допустим можно определить N случайных, попарно независимых
точек p1, p2 , ..., pN , одинаково распределенных в G с плотностью рас98
пределения q ( p ) . Обозначим s j ( f )
f (pj )
q( p j )
. Случайные величины
s j ( f ) попарно независимы и одинаково распределены. Вычислим математическое ожидание и дисперсию случайной величины s j ( f )
Ms j ( f )
f ( p)
q( p) q( p)dp U ( f ) ,
G
Ds j ( f ) Ms 2j ( f ) [ Ms j ( f )]2
(
G
f ( p) 2
f ( p)
f2
) q( p)dp (
q( p)dp) 2 U ( ) (U ( f )) 2 D( f ) .
q( p)
q( p)
p
G
Обозначим через
N
S N ( f ) N 1 s j ( f ) .
j 1
Вычислим математическое ожидание и дисперсию для S N ( f )
MS N ( f )
1
N
DS N ( f )
1
N2
N
Ms j ( f ) U ( f ) ,
j 1
N
Ds j ( f )
j 1
D( f )
.
N
Из теории вероятностей известно, что с вероятностью 1 выполняется неравенство Чебышева
| S N ( f ) U ( f ) |
D( f )
.
N
(5.44)
Таким образом, чем больше N , тем с большей точностью выражение
S N ( f ) будет аппроксимировать величину интеграла (5.43).
Если взять, например, 0.01 и N 10 4 , то с вероятностью 0.99
будет выполняться оценка
99
| S N ( f ) U ( f ) |
1
10
D( f ) .
Если точки p1, p2 , ..., pN независимы в совокупности, то оценку
(5.44) можно улучшить. На основании центральной предельной теоремы, можно показать, что вероятность того, что случайная величина
D( f )
( S N ( f ) U ( f ))
не превосходит по модулю y 0 , при
N
N асимптотически равна
2
P( y ) 1
exp(
y
t2
)dt .
2
Следовательно, при достаточно больших N с вероятностью близкой к
P ( y ) будет выполняться неравенство
| S N ( f ) U ( f ) | y
D( f )
.
N
(5.45)
Например, если взять y 3 и y 5 , то неравенство (5.45) будет выполняться с вероятностью 0.997 и 0.99999 соответственно. Величина в
правой части (5.44) и (5.45) зависит от дисперсии D( f ) . Оценим ее
s j ( f ) SN ( f ) s j ( f )
1
N
N
1
1
N
s i ( f ) s j ( f )(1 N ) N s i ( f ) .
i 1
i 1
Отсюда получаем
D( s j ( f ) S N ( f )) (1
(1
1 2
1
) Ds j ( f ) 2
N
N
N
Ds i ( f )
i 1
i j
1 2
N 1
1
) D( f ) 2 D( f ) (1 ) D( f ) .
N
N
N
Из (5.46) имеем
D( f )
N
D( s j ( f ) S N ( f )) .
N 1
100
(5.46)
Так как M (s j ( f ) S N ( f )) U ( f ) U ( f ) 0 , то D(s j ( f ) S N ( f ))
N
M ( s j ( f ) S N ( f )) 2 . На
N 1
основании закона больших чисел при достаточно больших N можно
считать, что
M ( s j ( f ) S N ( f )) 2 , и, значит D( f )
M ( s j ( f ) S N ( f )) 2
1
N
N
(s j ( f ) S N ( f )) 2 .
j 1
Поэтому с большой вероятностью верно приближенное равенство
D( f )
1 N
(s j ( f ) S N ( f )) 2 .
N 1 j 1
(5.47)
Пусть (G ) 1 и задана вероятность 1 , с которой необходимо
получить приближенное значение интеграла с точностью . Величину
y можно определить из равенства
2
exp(
y
t2
)dt .
2
Учитывая, что справедливо равенство
N
N 1
j 1
j 1
N
(s j ( f ) S N ( f )) 2 (s j ( f ) S N 1 ( f )) 2 N 1 (sN ( f ) S N ( f )) 2 ,
то вычисление интеграла можно проводить следующим образом.
Определяя последовательно точки p1, p2 , ..., pN , по рекуррентным
формулам
последовательно
определяем
значения
t N ( f ), S N ( f ), d N ( f ), D N ( f )
t N t N 1 s N ( f ), S N
d N d N 1
tN
,
N
d
N
(s N S N ) 2 , D N ( f ) N .
N 1
N 1
101
(5.48)
Точность вычисления интеграла по N точкам p i определяем по
DN ( f )
. Если N , то вычисления прекращаются,
N
считая, что с вероятностью 1 выполняется неравенство
| S N ( f ) U ( f ) | . Если точность не достигнута, то следует взять
еще одну точку и повторить вычисления по формулам (5.48) и так далее. В качестве начального приближения можно положить
t1 s1 S1 , d1 D1 0 .
Из формулы (5.45) следует, что метод сходится со скоростью
1
0(
) , причем порядок не зависит от размерности интеграла и гладN
кости функции f ( p) . Недостаток метода заключается в том, что
оценки вида (5.45) выполняются лишь в предположении, что имеющиеся последовательности точек p i являются независимыми в совокупности, хотя часто генерируемые датчиками псевдослучайных чисел
последовательности можно считать лишь попарно независимыми.
Особенно неблагоприятно это может сказаться на вычислении интегралов высокой кратности, так как требование независимости необходимо предъявлять к совокупностям из m чисел, где m – кратность
интеграла.
Одним из важных критериев эффективности метода является велиD( f )
чина относительной погрешности
. Практика вычислений
|U( f ) | N
формуле N y
показывает, что величина
D( f )
имеет тенденцию к резкому росту с
|U( f ) |
увеличением размерности интегралов. Поэтому с увеличением размерности трудоемкость метода возрастает. Отметим, что риск применения метода Монте-Карло связан не с вероятностным характером
оценок точности метода, а с тем, что генерируемые датчиками (программами ЭВМ) последовательности псевдослучайных чисел не обладают необходимыми статистическими свойствами.
2 Повышение точности метода Монте-Карло
Из оценки (5.45) видно, что точность метода повышается с уменьf ( p)
шением разброса значений функции
. Следовательно, точность
q( p)
102
зависит от выбора q ( p ) . Выше предполагалось, что все узлы p i имеют одинаковую функцию распределения q( p j ) . Однако на практике
узлы p i целесообразно выбирать каждый со своей функцией распределения q i ( p) . Для этого, например, исходный интеграл можно представить в виде суммы
m
U ( f ) f ( p)dp U j ( f ) ,
где U j ( f )
f ( p)dp , а
(5.49)
j 1
G
N взять в виде N N1 N 2 ... N m .
Gj
Каждый интеграл в (5.49) U j ( f ) вычисляется по методу МонтеКарло с N j узлами и своей функцией распределения q j ( p) . Если область G удается разбить на подобласти G j , в которых функция мало
изменяется, то такой прием может дать существенное увеличение точности.
Пусть, например, для каждого из интегралов U j ( f ) узлы p ij ,
i 1,2,...,N j имеют равномерную плотность распределения q j j 1 ,
где j – мера области G j и любые два узла распределены независимо. Тогда можно показать, что при N j N j 1 выполняется неравенство
D(S N ( f )) D(S N ( f )) ,
где
m
m
j 1
j 1
D( S N ( f )) D j ( f ) N j 1 , S N ( f ) S j ( f ), S j ( f )
1
Nj
Nj
S ij ( f ) .
i 1
3 Экстраполяция по Ричардсону
Пусть при вычислении интеграла J по некоторой квадратурной
формуле известно, что порядок погрешности R( f ) 0(h m ) . Тогда для
практической оценки погрешности R( f ) и уточнения значения интеграла можно воспользоваться методом двойного пересчета.
Пусть R( f ) Mhm , где M – некоторая постоянная для f (x) на
отрезке [a, b] , подлежащая определению. Вычислим значение интегра103
ла, разбивая промежуток на n1 и n 2 частей. Будем считать, для опре-
ba
ba
. Согласно предполо, h2
n1
n2
жению о структуре погрешности, имеем
деленности, что n 2 n1 , h1
Rn1 ( f ) J J n1 M (
ba m
) ,
n1
Rn2 ( f ) J J n2 M (
ba m
) .
n2
Отсюда следует
nm nm
J n2 J n1 M (b a) m 2 m m1
n n
1 2
,
M ( J n2 J n1 )
n 2m n1m
(b a) m (n 2m n1m )
.
Для погрешности R( f ) получим приближенную формулу
R( f )
Если h
J n2 J n1
(b a)
m
n1m n 2m
n 2m
n1m
hm .
ba
, то выражение для погрешности имеет вид
n2
R( f )
J n2 J n1
n 2m n1m
n1m .
Тогда в качестве уточненного значения интеграла можно взять выражение
nm
(5.50)
J n2 ,n1 J n2 m 1 m ( J n2 J n1 ) .
n 2 n1
Описанный способ уточнения интеграла называется экстраполяцией по Ричардсону. Легко заметить, что J n2 ,n1 [ J n1 , J n2 ] . На практике в качестве n 2 удобно брать n 2 2n1 . В этом случае формула
(5.50) примет вид
J n2 ,n1 J n2
n1m
n1m (2 m
1)
( J n2 J n1 ) J 2n1
104
1
2 1
m
( J 2n1 J n1 ) .
Лекция 8 Сходимость квадратурных процессов
1 Теорема о сходимости интерполяционного многочлена.
2 Замечания о применимости теоремы.
3 Сходимость интерполяционных квадратур.
1 Теорема о сходимости интерполяционного многочлена
Мы рассматривали формулы численного интегрирования вида
b
n
f ( x)dx c k f ( x k ) .
(5.51)
k 1
a
Их получали путём замены подынтегрального выражения интерполяционным многочленом Лагранжа. Но возможны и другие способы их
построения. В связи с этим рассмотрим следующий вопрос.
b
Функционалу
f ( x)dx
поставим в соответствие последователь-
a
n
ность функционалов L n ( f ) c k( n ) f ( x k( n ) ) , где c k(n ) выбираются из
k 1
некоторой бесконечной треугольной матрицы C , а x k(n ) – из другой
заданной треугольной матрицы X
c (1)
1( 2)
c
C 1(3)
c1
...
c 2( 2)
c 2(3)
c 3(3)
...
...
x (1)
1( 2)
x
X 1(3)
x1
...
,
...
x 2( 2)
x 2(3)
x 3(3)
...
...
.
...
Предполагается, что все x k( n ) [ a, b] .
При каких условиях, наложенных на c k(n ) и x k(n ) , для любой непрерывной
функции
f (x)
на
будет
[ a, b]
иметь
место
b
lim Ln ( f ) f ( x)dx ? Сформулируем следующую теорему.
n
a
b
Теорема 11. Для того чтобы Ln ( f ) f ( x)dx при n для
a
любой непрерывной на отрезке [a, b] функции f (x) , необходимо и
105
достаточно чтобы это имело место для любого многочлена и чтобы
n
| c k( n) | M
для любого n .
k 1
Доказательство. Достаточность. При этом будем ссылаться на
следующую теорему Вейерштрасса: для любой непрерывной на отрезке [a, b] функции f (x) и для любого 0 можно найти такой многочлен P (x) , что | f ( x) P( x) | при любом x [a, b] .
Рассмотрим разность
b
b
b
a
a
a
f ( x)dx Ln ( f ) [ f ( x)dx P( x)] P( x)dx Ln ( P) Ln ( f P) . (5.52)
В силу теоремы Вейерштрасса можно найти такой многочлен P (x) ,
что | f ( x) P( x) | при x [a, b] .
Пусть P (x) в (5.52) и будет таким многочленом. Тогда абсолютная
величина первого члена правой части не может превышать (b a) . В
силу первого условия доказываемой теоремы второе слагаемое в (5.52)
при достаточно большом n может быть сделано меньше по абсолютной величине. Далее,
n
Ln ( f P) c k( n ) [ f ( x k( n ) ) P( x k( n ) )] .
k 1
Таким образом,
n
Ln ( f P) | c k( n ) | | [ f ( x k( n ) ) P( x k( n ) )] | M ,
k 1
отсюда следует
b
| f ( x)dx Ln ( f ) | (b a 1 M ) ,
a
и может быть сделано сколь угодно малой величиной. Достаточность
доказана.
Необходимость. Необходимость первого условия очевидна, так
как многочлены являются непрерывными функциями (т.к. если процесс сходится для любой непрерывной функции, то он должен схо106
диться и для всякого многочлена ввиду его непрерывности). Поэтому
докажем необходимость только второго условия. Сделаем это от противного.
Пусть
n
| c k( n) |
не ограничены. Для каждого n построим функцию
k 1
n (x) , со следующими свойствами
1. n ( x k(n ) ) равно +1, если c k( n ) 0 и равно -1, если c k( n ) 0 ;
2. n (x) – непрерывная функция;
3. | n ( x) | 1 .
Очевидно,
n
Ln ( n ) | c k( n ) | M n .
(5.53)
k 1
Возьмём некоторую из построенных нами функций n1 ( x) . Для неё
должно иметь место
b
lim Ln ( n1 ( x)) n1 ( x)dx .
n
Но | n ( x) | 1 . Следовательно,
a
b
n1 ( x)dx b a
и найдётся такое N 1 ,
a
что при n N1 будет
| Ln ( n1 ( x)) | e(b a) ,
здесь e – основание натуральных логарифмов.
Далее, найдётся такое n 2 N 1 , что M n2 2 2! . Рассмотрим функцию
2 ( x)
n1 ( x) n2 ( x)
1!
2!
.
Она непрерывна. Следовательно,
n ( x) n2 ( x) b n1 ( x) n2 ( x)
lim Ln 1
dx .
n
2! a 1!
2!
1!
107
Но
b
n1 ( x)
a
1!
n2 ( x )
1 1
dx (b a ) (e 1)(b a ) .
1! 2!
2!
Поэтому найдётся такое N 2 , что при n N 2 будет
n ( x ) n2 ( x )
Ln 1
e(b a ) .
2!
1!
Найдём такое n3 N 2 , что M n3 3 3! и продолжим наше построение
дальше.
Пусть мы уже нашли N m . Тогда находим nm 1 N m , такое, что
M nm1 (m 1) (m 1)!, и строим функцию
m1 ( x)
n1 ( x) n2 ( x)
1!
2!
...
nm1 ( x)
(m 1)!
.
Она непрерывна. Следовательно,
b
lim Ln ( m1 ) m 1 ( x)dx .
n
a
Но
b
1
1
1
m1 ( x)dx 1! 2! .. (m 1)! (b a) (e 1)(b a) .
a
Находим N m 1 такое, что при n N m1
Ln ( m1 ) e(b a) ,
и продолжим построение дальше.
Таким образом, мы получим ряд
n1 ( x) n2 ( x)
1!
2!
...
nm ( x)
m!
... .
Этот ряд будет равномерно сходиться, и, следовательно, его сумма
будет непрерывной функцией. Обозначим её f (x) .
108
Возьмём теперь любое натуральное число k и представим f (x) в виде
k 1
f ( x)
( x)
ni
i 1
i!
nk ( x)
k!
ni ( x)
i k 1
i!
.
При этом
k 1
Lnk ( f ) Lnk (
ni
( x)
i!
i 1
) Lnk (
nk ( x)
k!
ni ( x)
i k 1
i!
) Lnk (
).
(5.54)
Оценим каждое слагаемое в отдельности. Так как n k N k 1 , то
k 1
Lnk (
( x)
ni
i!
i 1
) e(b a) .
(5.55)
Далее,
ni ( x)
i k 1
i!
1
1
1
1
...
1
(k 1)! k 2 (k 2)( k 3)
i k 1 i!
n
1
1
1
1
1
...
1
2
(k 1)! k 2 (k 2)
(k 1)! 1 1
k 2
k 2
k 1
1
.
(k 1)! (k 1) (k 1)! k k k!
Таким образом,
Lnk (
ni ( x)
i k 1
i!
)
1
M nk .
k k!
(5.56)
Функционал от среднего члена будет равен (см.(5.53))
Lnk (
nk ( x)
k!
)
M nk
k!
.
(5.57)
Сопоставляя соотношения (5.54), (5.55), (5.56), (5.57), получим
Lnk ( f )
M nk
k!
109
M nk
k k!
e(b a) .
Но M nk k k! , следовательно,
1
1
L nk ( f ) k k !
e(b a) k 1 e(b a) .
k ! k k!
Но последнее выражение неограниченно возрастает с возрастанием k.
b
Поэтому Lnk ( f ) не может стремиться к
f ( x)dx . Пришли к противоa
речию. Теорема доказана.
2 Замечания о применимости теоремы
Для интерполяционно-квадратурных процессов сходимость,
наверняка, имеет место для любого многочлена и первое условие теоремы можно опустить. Далее, беря f ( x) 1 , получим
n
b
k 1
a
c k(n) dx b a .
Поэтому, если все ck(n ) положительны, то и второе условие теоремы
будет выполнено. Это и имело место в формулах Гаусса. Поэтому
квадратурный процесс по формулам Гаусса всегда сходится.
При изучении формул Ньютона-Котеса мы видели, что у них имеются отрицательные коэффициенты. И можно показать, что для формул Ньютона-Котеса условие
n
| c k( n) | M
не выполнено.
k 1
3 Сходимость интерполяционных квадратур
В таких квадратурных формулах коэффициенты ck(n ) вычисляются
по узлам x k(n ) при помощи равенств
b
( x)
a
( x x k( n ) ) ( x k( n ) )
c k( n ) p ( x)
dx, k 1,2,..., n ,
а матрица коэффициентов C определяется по матрице узлов X .
Поэтому нужно выяснить, как должны быть связаны между собой матрица узлов X и класс F функций f (x) , чтобы процесс сходился?
110
Рассмотрим простейшую теорему, дающую достаточное условие
сходимости.
Теорема 12. Пусть отрезок [a, b] конечный и весовая функция
p (x) абсолютно интегрируема на [a, b] . Если функция f (x) и таблица
узлов X таковы, что интерполяционный процесс сходится к f (x)
равномерно относительно x на отрезке [a, b] , то интерполяционный
квадратурный процесс
b
n
f ( x) p( x)dx c k
a
(n)
k 1
f ( x k( n) ) Rn ( f )
сходится при n к точному значению интеграла.
Доказательство. Обозначим rn (x) погрешность интерполирования функции f (x) по значениям в узлах xk(n) , ( k 1,2,...,n ). Погрешность приближённой квадратуры связана с rn (x) равенством
b
R n ( f ) rn ( x) p( x)dx .
a
Так как по условию теоремы rn (x) равномерно на отрезке [a, b] стремится к 0 при n , то можно перейти к пределу под знаком интеграла, значит,
lim Rn ( f ) 0 .
n
Теорема доказана.
О сходимости формул Чебышева при p( x) 0 вопрос ставить
нельзя, так как при n 10 таких формул не существует.
Тема 6 ЧИСЛЕННОЕ РЕШЕНИЕ ИНТЕГРАЛЬНЫХ
УРАВНЕНИЙ
Лекция 1 Метод последовательных приближений.
1 Основные виды линейных интегральных уравнений.
2 Теорема Фредгольма.
3 Метод последовательных приближений.
111
1 Основные виды линейных интегральных уравнений
Под интегральным уравнением понимается уравнение, содержащее неизвестную функцию y(x) под знаком определенного интеграла. Интегральное уравнение будет линейным, если неизвестная
функция входит в него лишь в первой степени.
Уравнение вида
b
K ( x, s) y(s)ds
f ( x) ,
(6.1)
a
где K ( x, s ) – ядро и f (x) – известные функции, называется интегральным уравнением Фредгольма первого рода.
Уравнение вида
b
y ( x) K ( x, s) y ( s)ds f ( x) ,
(6.2)
a
где K ( x, s ) – ядро и f (x) – известные функции, а – числовой параметр, называется интегральным уравнением Фредгольма второго
рода.
Параметр вводится по следующим соображениям: при некотором данном значении интегральное уравнение (6.2) не всегда имеет
решения. Варьируя параметр можно добиться того, чтобы решение
уравнения (6.2) существовало. Параметр можно также ввести в левую часть уравнения Фредгольма первого рода (6.1).
Если в уравнении (6.2)
f ( x) 0 , то получается однородное
уравнение
b
y ( x) K ( x, s) y ( s)ds ,
(6.3)
a
допускающее нулевое решение y 0 . Значения параметра , при которых однородное интегральное уравнение (6.3) имеет ненулевые решения, называются собственными значениями (числами) ядра
K ( x, s) или соответствующего уравнения (6.2), а отвечающие им ненулевые решения называются собственными функциями.
2 Теорема Фредгольма
На вопрос о разрешимости интегральных уравнений дает следующая теорема Фредгольма:
112
1) если не является собственным значением ядра K ( x, s ) , то
соответствующее неоднородное интегральное уравнение Фредгольма
(6.2) с регулярным ядром K ( x, s ) и непрерывным свободным членом
f (x) имеет единственное непрерывное решение y(x) , x [a, b] ;
2) если же является собственным значением, то уравнение (6.2)
или не имеет решений, или же имеет их бесконечное множество.
В приложениях важную роль играют уравнения Фредгольма второго рода с симметрическим ядром K ( x, s ) :
K ( x, s) K ( s, x) .
Симметрические ядра обладают следующими свойствами
1. Для всякого симметрического ядра существует, по меньшей мере, одно собственное значение.
2. Все собственные значения симметрического ядра действительны.
3. Собственные функции (x) и (x) симметрического ядра, соответствующие различным собственным значениям и ( ) ,
ортогональны между собой на [a, b]
b
( x) ( x)dx 0 .
a
В приложениях встречаются также интегральные уравнения вида
x
K ( x, s) y(s)ds
f ( x),
(6.4)
a
и
x
y ( x) K ( x, s) y ( s)ds f ( x) ,
(6.5)
a
которые называются интегральными уравнениями Вольтерра соответственно первого и второго рода. Если ввести функцию
K ( x, s), при a s x
K ( x, s )
,
0, при s x
то уравнения Вольтерра можно записать в виде соответствующих
уравнений Фредгольма с ядром K ( x, s) . Таким образом, теория уравнений Вольтерра сводится к теории уравнений Фредгольма, однако в
некоторых случаях уравнения Вольтерра полезно изучать независимо.
113
В дальнейшем будем изучать интегральные уравнения Фредгольма
и Вольтерра второго рода поэтому, для краткости, их будем именовать
просто уравнениями Фредгольма и Вольтерра. Основными задачами
будут
1. Нахождение приближенного или точного решения неоднородного интегрального уравнения при заданном значении параметра .
2. Нахождение собственных значений и соответствующих собственных функций однородного интегрального уравнения.
3 Метод последовательных приближений
Рассмотрим интегральное уравнение Фредгольма второго рода
(6.2)
b
y ( x) f ( x) K ( x, s) f ( s)ds ,
(6.6)
a
где f (x) и K ( x, s ) непрерывны.
Будем искать решение в форме степенного ряда
y ( x)
n n ( x ) .
(6.7)
n 0
Подставляя выражение (6.7) в уравнение (6.6) и приравнивая коэффициенты при одинаковых степенях параметра , будем иметь следующие равенства
0 ( x) f ( x),
b
n ( x) K ( x, s ) n 1 ( s )ds, n 1,2,... .
(6.8)
a
Пусть | K ( x, s) | M и | f ( x) | N в области R {a x b, a s b} .
Из формул (6.8) по индукции получаем | n ( x) | M n N (b a) n . Поэтому сходимость ряда (6.7) будет обеспечена, если
| |
1
.
M (b a)
Приняв
y ( x) y n ( x)
n
k k ( x ) ,
k 0
114
получим приближенное решение интегрального уравнения (6.6) с погрешностью
n | y ( x) yn ( x) |
| |k | k ( x) |
k n 1
N[M (b a) | |] k
k n 1
N[M (b a) | |] n 1
.
1 M (b a) | |
Формула (6.7) дает аналитическое относительно решение уравнения Фредгольма (6.6) в окрестности точки 0 . Из формул (6.8)
следует, что решение (6.7) можно записать в виде
b
n 1
a
y ( x) f ( x) n1 K n ( x, s) f ( s)ds
или
b
y ( x) f ( x) R( x, s, ) f ( s)ds ,
(6.9)
a
где
R ( x, s, ) n 1 K n ( x, s ) .
(6.10)
n 1
Коэффициенты K n ( x, s) называются итерированными ядрами и
могут быть последовательно найдены по формулам
K1 ( x, s) K ( x, s),
b
K n ( x, s) K ( x, t ) K n 1 (t , s)dt, n 2,3,... .
a
Функция R( x, s, ) называется резольвентой уравнения (6.6) и при
малых | | определяется степенным рядом (6.10). Пользуясь аналитическим продолжением резольвенту R( x, s, ) можно продолжить на
всю комплексную плоскость параметра , за исключением собственных значений 1 , 2 , ... (особые точки), которые являются полюсами
резольвенты. Тогда формула (6.9) дает решение интегрального уравнения (6.6) при любом k , (k 1,2,...) .
115
Лекция 2 Решение интегральных уравнений
1 Метод конечных сумм.
2 Метод вырожденных ядер.
3 Приемы построения вырожденных ядер.
1 Метод конечных сумм
Метод основывается на приближенном вычислении определенного
интеграла с помощью некоторой квадратурной формулы
b
n
a
i 1
F ( x)dx Ai F ( xi ) R[ F ], i 1,2,..., n .
(6.11)
Здесь x i – абсциссы точек отрезка [a, b] , Ai – числовые коэффициенты, не зависящие от выбора функции F (x) , R[F ] – остаточный член
формулы. Обычно Ai известны и
n
Ai b a .
i 1
Например, в случае равноотстоящих точек xi a (i 1)h , где
ba
, будем иметь
h
n 1
1. Для формулы прямоугольников
Ai h, i 1,2,..., n 1, An 0 .
2. Для общей формулы трапеций
A1 An
h
, A2 A3 ... An1 h .
2
3. Для общей формулы Симпсона при n 2m 1
A1 A2m1
h
4h
2h
.
; A2 A4 ... A2m
; A3 A5 ... A2m1
3
3
3
Пусть дано интегральное уравнение (6.2)
b
y ( x) K ( x, s) y ( s)ds f ( x) .
(6.12)
a
Возьмем точки xi [a, b] и обозначим
116
y( xi ) yi , K ( xi , yi ) Kij ,
f ( xi ) f i , i, j 1,2,..., n .
На основании формулы (6.11) будем иметь
n
yi Ai K ij y j f i Ri , i 1,2,..., n ,
(6.13)
i 1
где Ri – соответствующие ошибки. Отбрасывая в системе (6.13) погрешности Ri , для приближенных значений y i решения y(x) в узлах
x i получим линейную алгебраическую систему
n
yi Ai K ij y j f i , i 1,2,..., n .
(6.14)
i 1
Если определитель ( ) этой системы отличен от нуля, то система
(6.14) имеет единственное решение y i , которое можно найти, например, методом Гаусса. Найдя y i для решения y(x) , получаем из (6.12)
приближенное аналитическое выражение
n
y ( x) f ( x) Ai K ( x, x j ) y j .
(6.15)
i 1
Различные между собой корни 1 , 2 ,..., m , (m n) алгебраического уравнения ( ) 0 представляют собой приближения собствен-
Yikl , i 1,2,...,n; k 1,2,...,m;
l 1,2, ..., pk – соответствующие ненулевые решения однородной системы для (6.14), то собственные функции ядра приближенно определяются формулами
ных значений ядра K ( x, s ) . Если
n
kl ( x) k A j K ( x, x j )Y jkl , k 1,2,..., m; l 1,2,..., pk .
j 1
Метод конечных сумм может быть применен также к интегральному уравнению Фредгольма первого рода
b
K ( x, s) y ( s)ds f ( x) .
a
В этом случае приближенные значения y i решения y(x) в узлах x i
будут определяться из системы
117
n
Ai K ij y j f i , i 1,2,..., n .
(6.16)
i 1
Особенно просто применение метода конечных сумм для решения
интегрального уравнения Вольтерра второго рода
x
y ( x) K ( x, s) y ( s)ds f ( x) , a x b ,
a
которое можно рассматривать как уравнение Фредгольма второго рода.
Здесь K ij 0 при j i и, следовательно, соответствующая система
(6.14) имеет вид
i
yi Ai K ij y j f i , i 1,2,..., n .
(6.17)
i 1
Получилась линейная система с треугольной матрицей.
1 Ai K ii 0 , то из системы (6.17) последовательно находим
Если
y1 f1 (1 A1K11 ) 1
y2 ( f 2 A1K 21 y1 )(1 A2 K 22 ) 1
.......... .......... .......... .......... .......... ......
n 1
yn ( f n A j K ij y j )(1 An K nn ) 1 .
j 1
2 Метод вырожденных ядер
Ядро K ( x, s ) называется вырожденным, если оно может быть
представлено в виде конечной суммы парных произведений
n
K ( x, s ) i ( x ) i ( s ) ,
(6.18)
i 1
где функции i (x) и i (s) , i 1,2,..., n , являются линейно независимыми.
Подставим (6.18) в интегральное уравнение Фредгольма второго
рода
118
b
y ( x) f ( x) K ( x, s) y ( s)ds .
(6.19)
a
Для интегрального уравнения (6.19) с вырожденным ядром K ( x, s ) –
будем иметь
n
y ( x ) f ( x ) ci i ( x ) ,
(6.20)
i 1
где
b
ci i ( s) y ( s)ds, i 1,2,..., n
(6.21)
a
некоторые постоянные коэффициенты. Подставим (6.20) в выражение
(6.21). Теперь для определения коэффициентов c i имеем алгебраическую систему линейных уравнений
b
b
n
a
a
j 1
c i i ( s) f ( s)ds i ( s) c j j ( s) ds,
i 1,2,..., n
или
n
ci c j ij f i ,
(6.22)
j 1
где
b
b
a
a
f i i ( s) f ( s)ds, ij i ( s) j ( s)ds .
(6.23)
Систему (6.22) можно записать в виде
n
( ij ji )c j
j 1
f i , i 1,2,..., n ,
0, если i j
где ij
– символ Кронекера. Обозначим через ( )
1, если i j
определитель последней системы
119
( ) det( ij ji )
1 11 21 ...
12 1 22 ...
...
...
1n
2 n
n1
n 2
...
...
... 1 nn
и через ij ( ), i, j 1,2,...,n – алгебраические дополнения соответствующих элементов ij ji определителя ( ) .
Если ( ) 0 , то на основании правила Крамера, находим значения коэффициентов
n
ji ( ) f j
ci
j 1
, i 1,2,..., n .
( )
Следовательно, в силу (6.20) интегральное уравнение (6.19) имеет
единственное решение
n
n
y ( x) f ( x)
i 1 j 1
ji ( )
( )
f j i ( x ) .
(6.24)
Отсюда, подставляя вместо f j соответствующее выражение из (6.23) и
заменяя сумму интегралов интегралом суммы, получим
( x, s , )
f ( s)ds ,
( )
a
b
y ( x) f ( x)
(6.25)
где
n
n
( x, s, ) i ( x) j (s) ji ( ) .
i 1 j 1
Их формулы (6.25) вытекает, что функция
R( x, s, )
ji ( )
( x, s, ) n n
i ( x) j (s)
( )
( )
i 1 j 1
(6.26)
является резольвентой интегрального уравнения (6.19).
Собственные значения ядра K ( x, s ) определяются из уравнения
( ) 0 .
120
(6.27)
Если k , k 1,2,..., m, m n является корнем уравнения (6.27)
( k 0 ), то соответствующие собственные функции k (x) ядра
K ( x, s) , то есть нетривиальные решения однородного уравнения, соответствующего (6.19), будут иметь вид
n
k ( x) k ci( k ) i ( x) ,
i 1
где
ci(k )
– ненулевые решения линейной однородной системы
n
( ij k ji )c (j k ) 0,
i 1,2,..., n .
j 1
Если k является собственным значением ядра K ( x, s ) , то неоднородное уравнение (6.19) или не имеет решений или имеет их бесконечно много.
Для приближенного решения общего интегрального уравнения
b
y ( x) f ( x) K ( x, s) y ( s)ds ,
(6.28)
a
функции f (x) и K ( x, s ) будем считать непрерывными. Ядро K ( x, s )
заменим близким к нему вырожденным ядром
K ( n ) ( x, s )
n
m ( x) m ( s ) .
m 0
3 Приемы построения вырожденных ядер
Укажем несколько способов такой замены.
Если ядро K ( x, s ) аналитическое по x на отрезке [a, b] , то в качестве вырожденного ядра K (n) ( x, s) можно взять конечный отрезок ряда
Тейлора
n (x x )m
0
K ( n) ( x, s)
K ( mm ) ( x0 , s) ,
x
m
!
m 0
где x0 – некоторая точка отрезка [a, b] .
Аналогичный прием можно применить также, если ядро K ( x, s )
является аналитической функцией по s на отрезке [a, b] .
121
Для построения вырожденного ядра можно также использовать
конечный отрезок двойного ряда Тейлора
n
n
a pm ( x x0 ) p ( x x0 ) m ,
K ( n) ( x, s)
p 0 m 0
где
1
pm
K ( x0 , s0 ), x0 , s0 [a, b] .
p!m! x p x m
a pm
Пусть l b a . Непрерывное ядро K ( x, s ) допускает аппроксимацию тригонометрическим полиномом периода 2l . Например, можно
положить
K ( n) ( x, s)
a0 ( s) n
px
,
a p (s) cos
2
l
p 1
(6.29)
где a p (s), p 1,2,... – коэффициенты Фурье
a p ( s)
2b
px
K ( x, s) cos
dx .
l a
l
(6.30)
Аналогичное разложение получается, если поменять местами переменные x и s .
Можно также использовать конечный отрезок двойного ряда
Фурье. Полагая, например,
a p (s)
a p0
2
n
a pm cos
m 1
ms
,
l
p 0,1,2,..., n ,
из формул (6.29) и (6.30) имеем
K ( n) ( x, s)
a 00 1
4
2
n
n
a p0 cos
p 1
n
a pm cos
p 1m 1
px 1 n
ms
a 0m cos
l
2 m1
l
px
ms
cos
,
l
l
где
a pm
4
l
2
bb
K ( x, s) cos
aa
122
px
ms
cos
dxds .
l
l
Наконец, полагая
h
ba
, xi a ih, i 0,1,2,..., n ,
n
можно воспользоваться первым интерполяционным полиномом Ньютона по переменной x
K ( n ) ( x, s ) K ( x 0 , s )
n
( x x0 )( x x1 )...( x x m1 )
m 1
m!h m
m K ( x0 , s ) .
Аналогично можно взять первый интерполяционный полином
Ньютона по переменной s .
Иногда целесообразно использовать интерполяционный полином
Ньютона для функций двух переменных
K ( n) ( x, s) K ( x0 , s0 )
p m n P m K ( x , s )
0 0
x psm
( x x0 )
pm
p!m! h
p m 1
( x x1 )...( x x p 1 )( s s0 )...( s sm 1 ) ,
где x0 , s0 [a, b] .
Если K (n) ( x, s) является приближенным вырожденным ядром для
ядра K ( x, s ) и функция f n (x) близка к функции f (x) , то решение
z n (x) интегрального уравнения
b
z n ( x) f n ( x) K ( n ) ( x, s) y n ( s)ds
(6.31)
a
можно рассматривать как приближение решения y(x) уравнения
(6.28).
О единственности решения и погрешности интегрального уравнения, как показали Л.В.Канторович и В.И.Крылов, справедлива следующая теорема.
Теорема 13. Пусть
b
| K ( x, s ) K
(n)
( x, s) | ds , | f ( x) f n ( x) |
a
и резольвента Rn ( x, s, ) для уравнения (6.31) такова, что
123
b
| Rn ( x, s, ) | ds M n ( )
a
причем
выполнено
неравенство
x [a, b] ,
q | | [1 | | M n ( )] 1 , тогда уравнение (6.28) имеет единственное
решение y(x) и имеет место оценка
при
Nq[1 | | M n ( )]
,
1 q
| y ( x) z n ( x) |
(6.32)
где N max | f ( x) | .
x[ a ,b ]
Из оценки (6.32) вытекает, что если
n,
при
f n ( x ) f ( x)
z n ( x) y( x) на отрезке [a, b] .
причем
K (n) ( x, s) K ( x, s) и
M n ( ) M ( ) , то
Лекция 3 Решение интегральных уравнений Фредгольма
1 Метод коллокации.
2 Метод наименьших квадратов.
3 Метод моментов.
1 Метод коллокации
Рассмотрим интегральное уравнение
b
R[ y ] y ( x) K ( x, s) y ( s)ds f ( x) 0 .
(6.33)
a
Решение этого уравнения будем искать в виде функции определенного
вида
y n ( x, c1 , c2 ,..., cn )
(6.34)
со свободными параметрами (неопределенными коэффициентами)
c1 , c2 ,..., cn . Подставляя выражение (6.34) в уравнение (6.33), получим
невязку
b
R[ y n ] y n ( x) K ( x, s) y n ( s)ds f ( x) .
a
124
(6.35)
Если y является точным решением, невязка R[ y] 0 . Поэтому стараются подобрать параметры c1 , c2 ,..., cn так, чтобы невязка R[ y n ] была
как можно малой величиной. Минимизировать невязку R[ y n ] можно
различными способами. Здесь будут рассмотрены те методы минимизации невязки, которые применяются на практике.
Сначала сделаем несколько замечаний. Если невязка R[ y n ] получилась малой, то она близка к невязке R[ y] 0 , даваемой точным решением y . Но если два оператора R[ y n ] и R[y] имеют близкие значения, то отсюда не следует, что функции y n и y близки между собой в
обычном смысле (например, равномерного приближения). Поэтому
возникает задача, в которой по известной невязке R[ y n ] требуется
оценить погрешность | y y n | приближенного решения y n . Другая
задача, с которой обычно сталкиваются – это вопрос о сходимости y n
к точному решению y при n , то есть выяснение условий, при
которых имеет место предельное равенство lim y n y . Если это раn
венство справедливо, то данным методом решение y можно найти с
любой степенью точности, взяв достаточно большое количество параметров c1 , c2 ,..., cn .
Для построения приближенного решения y n обычно берут функцию, линейно зависящую от неизвестных c1 , c2 ,..., cn . Поэтому положим
n
y n 0 ( x ) ci i ( x ) ,
(6.36)
i 1
где 0 ( x), 1 ( x),..., n ( x) – известные линейно независимые координатные функции и c1 , c2 ,..., cn – неопределенные коэффициенты. Подставляя (6.36) в левую часть уравнения (6.33), получим невязку
n
b
n
i 1
a
i 1
R[ yn ] y0 ( x) cii ( x) f ( x) K ( x, s)[0 ( s) cii ( s)]ds ,
или
n
R[ y n ] 0 ( x, ) ci i ( x, ) ,
i 1
где
125
(6.37)
b
0 ( x, ) 0 ( x) f ( x) K ( x, s)0 ( s)ds ,
a
b
i ( x, ) i ( x) f ( x) K ( x, s) i ( s)ds, i 1,2,..., n .
a
Согласно методу коллокации требуется, чтобы невязка R[ y n ]
обращалась в нуль в заданной системе точек x j , j 1,2,...,n из отрезка [a, b] (точки коллокации), то есть, полагаем
R[ yn ( x j )] 0,
j 1,2,..,n, a x1 x2 ... xn1 xn b .
Отсюда на основании формулы (6.37) для определения коэффициентов
c1 , c2 ,..., cn получаем систему линейных алгебраических уравнений
n
ci i ( x j , ) 0 ( x j , ),
j 1,2,..., n .
(6.38)
i 1
Если определитель системы (6.38) ( ) отличен от нуля, то из нее
можно однозначно определить величины c1 , c2 ,..., cn , и, следовательно,
по формуле (6.36) найти приближенное решение y n . Из уравнения
~
( ) 0 можно найти приближенные значения k , k 1,2,...,n первых собственных чисел ядра K ( x, s ) .
~
Если положить f ( x) 0, 0 ( x) 0, k , то вместо системы
(6.38) будем иметь однородную систему
n
~
c~i(k ) i ( x j , k ) 0,
j 1,2,..., n .
i 1
Найдя ненулевые решения c~i(k ) этой системы, получим для ядра
K ( x, s) приближенные собственные функции
n
~
y n( k ) c~i( k ) i ( x) ,
i 1
~
отвечающие его собственному значению k k .
126
2 Метод наименьших квадратов
Для уравнения
b
R[ y ] y ( x) K ( x, s) y ( s)ds f ( x) 0 ,
(6.39)
a
аналогично методу коллокации, полагаем
n
y n 0 ( x ) ci i ( x ) ,
(6.40)
i 1
где 0 ( x), 1 ( x),..., n ( x) – известные линейно независимые координатные функции и c1 , c2 ,..., cn – неопределенные коэффициенты. Подставляя (6.40) в левую часть уравнения (6.39), получим невязку
n
R[ y n ] 0 ( x, ) ci i ( x, ) ,
i 1
где
b
0 ( x, ) 0 ( x) f ( x) K ( x, s ) 0 ( s )ds ,
a
b
i ( x, ) i ( x) f ( x) K ( x, s )i ( s )ds .
a
Согласно методу наименьших квадратов коэффициенты
c1 , c2 ,..., cn отыскиваются из условия минимума интеграла
b
b
n
a
a
i 1
I {R[ y n ]} 2 dx [ 0 ( x, ) ci i ( x, )]2 dx .
(6.41)
Это требование приводит к системе линейных алгебраических уравнений
I
0, j 1,2,..., n .
c j
Отсюда, на основании (6.41), дифференцируя
c1 , c2 ,..., cn под знаком интеграла, будем иметь
по
параметрам
b
n
1 I
i ( x, )[ 0 ( x, ) ci i ( x, )]dx 0 .
2 c j a
i 1
127
(6.42)
Обозначим
b
( i , j ) i ( x, ) j ( x, )dx .
a
Тогда систему (6.42) можно записать в виде нормальной системы метода наименьших квадратов
c1 ( 1 , 1 ) c2 ( 1 , 2 ) ... cn ( 1 , n ) ( 1 , 0 )
c ( , ) c ( , ) ... c ( , ) ( , )
2 2 1
2
2
2
n
2
n
2
0
..........
..........
..........
..........
..........
..........
..........
..........
cn ( n , 1 ) c2 ( n , 2 ) ... cn ( n , n ) ( n , 0 ) .
(6.43)
Заметим, что если 0 ( x) 0 , то 0 ( x) f ( x) и, следовательно, ( i , 0 ) ( i , f ) .
Вместо интегрального способа метода наименьших квадратов
можно воспользоваться точечным способом наименьших квадратов.
Метод наименьших квадратов применяется также для приближенного нахождения собственных значений и собственных функций ядра
K ( x, s) , аналогично тому, как это делается в методе коллокации. А
именно, полагая f ( x) 0 и 0 ( x) 0 , откуда 0 ( x) 0 , находим
приближенные значения собственных чисел из алгебраического уравнения det[( i , j )] 0 . После этого приближенные собственные
функции находятся из однородной системы (6.43), где вместо подставлено соответствующее приближенное значение.
3 Метод моментов
Пусть
b
R[ y ] y ( x) K ( x, s) y ( s)ds f ( x) 0 .
(6.44)
a
Аналогично предыдущему пункту, приближенное решение этого уравнения будем искать в виде конечной суммы
n
y n 0 ( x ) ci i ( x ) ,
(6.45)
i 1
где 0 ( x), 1 ( x),..., n ( x) – известные линейно независимые координатные функции и c1 , c2 ,..., cn – неопределенные коэффициенты. Подставляя (6.45) в левую часть уравнения (6.44), получим невязку
128
n
b
b
j 1
a
a
R[ y n ] c j [ j ( x) K ( x, s) j ( s)ds] K ( x, s) f ( s)ds . (6.46)
Согласно методу моментов коэффициенты c1 , c2 ,..., cn определяются
из условия ортогональности невязки ко всем координатным функциям
0 ( x), 1 ( x),..., n ( x) . Это дает систему уравнений
b
R[ y n ] i ( x)dx 0,
i 1,2,..., n .
a
Учитывая (6.46), получим
n
c j ( ij ij ) i ,
i 1,2,..., n ,
(6.47)
j 1
где
b
b
b
a
a
ij i ( x) f ( x)dx, ij i ( x)dx K ( x, s ) j ( s)ds ,
a
b
b
a
a
i i ( x)dx K ( x, s) f ( s )ds .
Если определитель системы (6.47) ( ) det( ij ij ) отличен от
нуля, то из этой системы однозначно определяются коэффициенты
c1 , c2 ,..., cn . Тогда формула (6.45) дает приближенное решение интегрального уравнения (6.44). Из уравнения ( ) 0 приближенно
находятся собственные значения 1 , 2 ,..., n ядра K ( x, s ) . Найдя
ненулевые решения однородной линейной системы
n
c~j ( ij ij ) 0,
i 1,2,..., n ,
j 1
легко строятся (см. например, метод вырожденных ядер) приближенные собственные функции ~
y (k ) ( x) , отвечающие данному собственному значению k .
Отметим, что рассмотренные здесь методы минимизации невязки
применимы также к решению нелинейных интегральных уравнений.
Имеются также другие методы решения интегральных уравнений,
например, метод Монте-Карло.
129
ЛИТЕРАТУРА
1 Березин, И.С. Методы вычислений: в 2 т. Т.1. [Текст] /
И.С.Березин, Н.П.Жидков. – М.: Наука, 1966. – 630с.
2 Демидович, Б.П. Численные методы анализа [Текст] / Б.П. Демидович, И.А. Марон, Э.З. Шувалова. – М.: Наука, 1967. – 368с.
3 Демидович, Б.П. Основы вычислительной математики [Текст] /
Б.П. Демидович, И.А. Марон. – М.: Наука, 1970. – 664с.
4 Самарский, А.А. Введение в численные методы [Текст] / А.А.
Самарский. – М.: Наука, 1972. – 271с.
5 Бахвалов, Н.С. Численные методы [Текст] / Н.С. Бахвалов. –
М.: Наука, 1973. – 632с.
6 Крылов, В.И. Вычислительные методы: в 2 т. Т.1. [Текст] /
В.И. Крылов, В.В. Бобков, П.И. Монастырный. – М.: Наука, 1976. –
304с.
7 Крылов, В.И. Вычислительные методы: в 2 т. Т.2. [Текст] /
В.И. Крылов, В.В. Бобков, П.И. Монастырный. – М.: Наука, 1977. –
400с.
8 Сборник задач по методам вычислений [Текст] / под ред. П.И.
Монастырного. – Мн.: БГУ, 1983. – 287с.
9 Вычислительная техника в инженерных и экономических расчетах [Текст] / А.В. Петров [и др.]. – М.: Высшая школа, 1984. – 320с.
10 Фурунжиев, Р.И. Применение математических методов и ЭВМ
[Текст] / Р.И. Фурунжиев, Ф.М. Бабушкин, В.В. Варавко. – Мн.: Выш.
шк., 1988. – 191с.
11 Калиткин, Н.Н. Численные методы [Текст] / Н.Н. Калиткин. –
М.: Наука, 1978. – 512с.
12 Воробьева, Г.Н. Практикум по вычислительной математике
[Текст] / Г.Н. Воробьева, А.Н. Данилова. – М.: Высш. школа, 1990. –
208с.
13 Заварыкин, В.М. Численные методы [Текст] / В.М. Заварыкин,
В.Г. Житомирский, М.П. Лапчик. – М.: Просвещение, 1991.
14 Амосов, А.А. Вычислительные методы для инженеров [Текст]
/ А.А. Амосов, Ю.А. Дубинский, Н.В. Копчёнова. – М.: Высш. школа,
1994.
15 Быкадоров, Ю.А. Информатика и вычислительная математика
[Текст] / Ю.А. Быкадоров, А.Т. Кузнецов, А.И. Шербаф. – Мн.: Нар.
асвета, 2000. – 334с.
16 Бахвалов, Н.С. Численные методы в задачах и упражнениях
[Текст] / Н.С. Бахвалов, А.В. Лапин, Е.В. Чижонков. – М.: Высш. школа, 2000.
130
17 Вержбицкий, В.М. Численные методы. Линейная алгебра и нелинейные уравнения [Текст] : учебное пособие для вузов / В.М. Вержбицкий. – М.: Высшая школа, 2000.
18 Вержбицкий, В.М. Численные методы. Математический анализ и обыкновенные дифференциальные уравнения [Текст] : учебное
пособие для вузов / В.М. Вержбицкий. – М.: Высшая школа, 2001.
19 Ерофеенко, В.Т. Уравнения с частными производными с приложениями в экономике [Текст] : курс лекций / В.Т. Ерофеенко, И.С.
Козловская. – Мн.: БГУ, 2001. – 196с.
20 Численные методы [Текст] : лабораторный практикум. Ч.1 /
С.И. Голик [и др.]. М-во образования РБ, Гомельский гос. ун-т им.
Ф.Скорины. – Гомель: ГГУ им. Ф.Скорины, 2001. – 60с.
21 Бахвалов, Н.С. Численные методы [Текст] : учеб. Пособие для
физ.-мат. специальностей вузов / Н.С. Бахвалов, Н.П. Жидков, Г.М.
Кобельков; под общ. ред. Н.И. Тихонова. – 2-е изд. – М.: Физмалит:
Лаб.базовых данных; СПб.: Нев.диалект, 2002. – 630с.
131
Учебное издание
Березовская Елена Михайловна
МЕТОДЫ ЧИСЛЕННОГО АНАЛИЗА
ТЕКСТЫ ЛЕКЦИЙ
В 2-х частях
Часть 1
ИНТЕРПОЛЯЦИЯ И ИНТЕГРИРОВАНИЕ
В авторской редакции
Подписано в печать
. .2007г. (
). Формат издания 60x84 1/16.
Бумага писчая №1. Гарнитура «Таймс».
Усл.п.л. 7,6. Уч-изд.л. 5,9. Тираж 30 экз.
Отпечатано с оригинала-макета на ризографе
в учреждении образования
«Гомельский государственный университет
имени Франциска Скорины»,
246019 г. Гомель, ул. Советская, 104
132