2 - Факультет радиофизики и компьютерных технологий
advertisement

4.Теория принятия решений
Издавна, в теории управления принятие решений (ПР) было важным
разделом. Но по мере становления теория принятия решений ТПР постепенно приобрела самостоятельное значение.
В ТПР применительно к техническим системам исследуются принципы функционирования различных объединений, принимающих решения (живые системы, коллективы людей, автоматы), рассматриваются
подходы к построению кибернетических моделей таких систем.
Как в практически каждой науке, в ТПР формируется свой подход к
формализации проблем, свой язык, аппарат выводов и методы исследования. На сегодня эти процессы развиваются и имеется еще ряд вопросов, которые можно выделить как ведущие.
Строгое определение области явлений, о которых можно говорить,
как о принятии решений.
Познание механизмов ТПР в деятельности человека и в биологических системах.
Изучение поведения биологических систем и целенаправленной
деятельности.
Формализация процесса ТПР.
Взаимодействие человека и технических средств процессе ПР.
Принятие решений в условиях неопределенности
Элементарная теория принятия решений рассматривается в условиях
неопределенности и риска.
Не утратила ТПР своего значения и в теории автоматического управления. В теории робототехнических систем как базовые анализируются
три вида условных предложений:
P1: если x есть A то y есть B.
P2: если x есть A
то y есть B иначе C.
P3: если x1 есть A1 и x2 есть A2 и ... xn есть An то y есть B
Не четкость определений множеств и их связей существенно
усложняет принятие решений даже в простых одноступенчатых схемах.
Например, для условного предложения P1 ряд авторов рекомендуют
решения по схемам.
Пусть A , A' , не четкие концепции в универсуме U; B , B ' , не четкие
концепции в универсуме V.
1. Предпосылка 1: если x есть A, то y есть B.
Предпосылка 2: x ' есть A' .
150
Вывод:
y ' есть B ' .
2. Предпосылка 1: если x есть A то y есть B.
Предпосылка 2: x ' есть очень A' .
Вывод:
y ' есть очень B ' .
3. Предпосылка 1: если x есть A то y есть B.
Предпосылка 2: x ' есть более или менее A' .
Вывод:
y ' есть более или менее B ' .
4. Предпосылка 1: если x есть A то y есть B.
Предпосылка 2: x ' не есть A' .
Вывод:
y ' не есть B ' .
По сути это ситуации частично рассмотренные в разделе 2.1. Предложение №1 – детерминированный случай. Зоны, в которой действительны
утверждения №2 и №4, четко определены (рис. 2). Зона действия утверждения №3 – нечеткая область.
Пусть E - универсальное множество, х - элемент Е, а G -некоторое
свойство. Обычное (четкое) подмножество А универсального множества
Е, элементы которого удовлетворяют свойству G, определяется как множество упорядоченных пар:
B B x / x,
где B x - характеристическая функция, принимающая значение 1, если
х удовлетворяет свойству G, и 0 - в противном случае.
При задании нечеткого подмножества для элементов х из Е нет однозначного ответа «да или нет» относительно свойства G. И хотя нечеткое
подмножество А универсального множества Е определяется также, как
множество упорядоченных пар:
A A x / x,
где A x - характеристическая функция принадлежности (или просто
функция принадлежности), принимающая значения уже в некотором
упорядоченном множестве М (например, М = [0,...,1]). Функция принадлежности указывает степень (или уровень) принадлежности элемента х
подмножеству А. Множество М называют множеством принадлежностей.
Если М = {0, 1}, то нечеткое подмножество А может рассматриваться
как обычное или четкое множество.
151
Ниже приведен пример результирующей матрицы для операции сложения в условиях, когда функция принадлежности A x представлена
L нечеткими величинами вида:
x1,i / x1,i , x2,i / x2,i , ..., xn,i / xn,i ,
где i 1... L .
Исходные функции принадлежности располагаются в левом столбце и
верхней строке матрицы. Элементами этой матрицы являются дискретные нечеткие величины
D x j ,i / x j ,i ,
где i 1... n , j 1... n и
D x j ,i min x1,i , x2, j ,
и x j ,i x1,i x2, j .
4.1. Общие положения теории принятия решений
Аналитически формально задача принятия решения описывается как
упорядочная четверка. Кортеж Z определяет класс схем принятия решений
Z F , A, E , Q ,
где F - множество возможных значений не наблюдаемого параметра;
A - множество всех возможных решений (альтернатив);
E - функция потерь, заданная на F , A ;
Q - статистическая закономерность на F .
Практически все величины, входящие в кортеж определены не четко.
Пусть имеется совокупность действий, операций, решений
а1, а2, ..., аm, m 2,
которые может совершить система для достижения поставленной цели,
причем одну и только одну операцию аi, i{1, 2, ..., m}, выбирает алгоритм, принимающий решение.
Кроме того, представлен перечень объективных условий (ситуаций),
F1, F2, ..., Fn,
одно из которых Fj, j{1, 2, ..., n}, будет иметь место в действительности.
152
Для каждой операции аi, i = 1, 2, ..., m, при каждом условии Fj, задан риск в некоторых единицах ei , j .
Величины ei , j , играющие роль платежей в теории игр, получаются
расчетным или оценочным путем. Они могут быть объективны или субъективны. Возникают определенные трудности при их числовой оценке,
обусловленные многими факторами. Величины ei , j можно задавать относительно, поэтому нередко их называют показателями предпочтительности.
На рис. 114 представлены виды двух типов функций рисков. Многоэкстремальной (а) и гладкой (б). Каждое значение функции рисков может быть нечетко заданным и многокомпонентным. Так как ei , j представляет собой основное наполнение матрицы решений, то рис. 114
можно определить как графическое представление матрицы решений.
а
б
Рис. 114. Вид различных типов функций риска
Табличное представление матрицы решений в различных областях
применения ТПР имеет свою специфику. Рассмотрим ее вид наиболее
часто встречающийся в технических приложениях. В таблице 10 представлены по строкам:
Вторая строка – символьное определение типа ситуации. В отдельных
источниках можно встретить название явление природы или состояние
природы. Все это говорит о желании авторов представить некоторый, не
153
управляемый системой параметр внешней среды, от которого зависит
эффективность возможных действий системы. Практическое решение в
расчетах имеет только индекс ситуации j .
Первая строка – характеристическая функция принадлежности q j .
Как правило определяется в виде вероятности возникновения ситуации
F j . Но это не ограничивает жестко ее суть. Данная величина чаще всего
используется в расчетах в виде сомножителя e j , поэтому имеет вид весовой функции F j ситуации, ее дополнительного влияния на исход решения.
Второй столбец – символьные обозначения возможных решений.
Практическое значение имеет только индекс решения. Именно поиск
данного индекса является базовой целью анализа. Его значение определяет оптимальное решение, дающее наибольший выигрыш или
наименьшие потери при заданном уровне возможного проигрыша, который может случится, если возникнет одна из не запланированных ситуаций.
Первый столбец – характеристическая функция принадлежности pi .
Определяет обычно вероятность осуществления решения Ai . В ряде случаев по объективным или субъективным причинам запланированное решение не реализуется полностью и реально осуществляется другое
учтенное или неучтенное решение (параметры реализованного решения
не позволяют говорить о том, что выполнено запланированное решение).
Поле таблицы заполняется оценками риска или выигрыша ei , j от
принятия решения Ai , при его реализации в условии F j .
Таблица 10
q1
F1
...
...
qj
Fj
...
...
qn
Fn
p1
A1
e1,1
...
e1, j
...
e1, n
...
pi
...
Ai
...
ei ,1
...
...
...
ei , j
...
...
...
ei , j
...
pm
...
Am
...
em,1 ...
154
...
...
em, j ...
...
em, n
При последующем анализе таблица видоизменяется. В нее вводятся
новые строки и столбцы. Они уменьшают объем вычислительных операций, так как из рассмотрения удаляются отдельные, слабые по мнению
авторов зависимости.
Добавляемый столбец получил название оценочной функции eri , которая отражает установленный по выбранной схеме принятия решений
(критерию) выигрыш или потери от решения с номером i .
Добавляемая строка e p обычно используется, как уменьшаемое в пересчетах таблицы принятия решений. В ряде преобразований она представляет максимально возможный выигрыш в ситуации F j . Тогда таблица превращается в таблицу потерь от не оптимальных для данной ситуации решений. После добавления строк и столбцов таблица принимает
новый вид (таблица 11).
Таблица 11
q1
F1
...
qj
...
Fj
...
...
qn
Fn
er
p1
A1
e1,1
...
e1, j
...
e1, n
er1
...
pi
...
Ai
...
ei ,1
...
...
...
ei , j
...
...
...
ei , j
...
eri
...
pm
...
Am
...
em,1 ...
ep
e p1
...
...
...
em, j ...
ep j
...
...
...
em, n erm
e pn
Число добавляемых столбцов может составлять и десяток. Тогда r
становится индексом критерия принятия решения. И таблица как бы
представляет решения многих экспертов, пользующихся для анализа
различными критериями.
Последующая обработка проводится только с со столбцами er .
Процедуры превращения матрицы принятия решений в вектор или
вектора слабо связанные друг с другом, естественно снижают вычислительную нагрузку. Но стремится к этому, как к основной цели необходимо осторожно. Прежде всего надо понимать то, что расчет достаточно
больших матриц по интегральным критериям высокой сложности, в конце концов, занимает несколько секунд, в крайнем случае минут рабочего
155
времени современных компьютеров в том числе и встраиваемых в интеллектуальные приборы.
В процессе преобразований не только дополняют но и вычеркиваются
те строки, которые описывают заведомо худшие последствия, чем те, что
предполагают остающиеся решения.
Если в процессе преобразований m становится равным единице, матрица превращается в вектор, отображающий последствия единственного
из возможных решений – фатальная ситуация в принятии решений (Таблица 12). Будущее не корректируется, остается только ждать.
Таблица 12
...
q1
p1
A1
...
qj
qn
F1
...
Fj
...
Fn
e1,1
...
e1, j
...
e1, n
Графическая интерпретация действий с матрицей последствий решений не ограничивается только построением 3D моделей. В практике
последовательного анализа используется построение несколько не обычной графической модели.
Проще всего дальнейшие графические формы представить для случая
с двумя учитываемыми ситуациями.
Таблица 13
0,5
0,5
F1
1
1
1
1
1
1
1
1
1
1
A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
F2
27
61
41
37
42
27
39
35
36
55
35
73
38
78
44
64
48
39
20
16
156
В таблице 13 приведен пример выигрыша от принятия одного из десяти вариантов решений, которые могут быть реализованы в двух ситуациях.
Для упрощения характеристические функции принадлежности опущены
Для начала построим график, у которого введены оси:
F - представлена числами 0, 1, являющихся индексами ситуаций F1 и
F2 ;
A - искомая величина представлена номерами принимаемых решений;
e - ось последствий принятых решений осуществленных в одной из
ситуаций.
Точки на графике (рис. 115) лежат в плоскости AF1e и плоскости ей
параллельной, но проходящей через точку F2 . Проекции на плоскость
F2 F1e и далее на ось F1e дают оценки выигрышей.
Рис. 115. Последствия решений в двух ситуациях
Таким образом, график образуется параллельными плоскостями отображающими столбцы таблицы и проходящими через индексы ситуаций.
А пересечение их с плоскостью F2 F1e дает линии последствий различных решений в данной ситуации. Превратим их в координатные оси.
157
Новые оси – числовые оценки последствий решений в каждой ситуации. Число осей и следовательно размерность пространства анализа равно числу рассматриваемых ситуаций плюс одна. Последняя ось – ось номеров решений отображает искомую величину – индекс оптимального
решения.
Ae1 ,...e j ,...en i 2 .
График на рис. 116 показывает полученную фигуру. Ось e1 отображает последствия решений при ситуации F1 , ось e2 - последствия решений
при ситуации F2 .
Рис. 116. Решения над полем принятия решений
Плоскость e10e2 образует поле принятия решений, из которого «вырастают» возможные решения. Такое преобразование позволяет понизить размерность пространства анализа.
На рис. 117 показано поле принятия решений (прямоугольник ABCD).
Оно образовано отрезками линий параллельных оси e1 и проходящими
через точки максимального и минимального выигрыша, который можно
получить при ситуации F2 , а также отрезками линий параллельных оси
158
e 2 и проходящими через точки максимального и минимального выигрыша, который можно получить при ситуации F1 .
В зависимости от принятого критерия мы проходим различные точки
в данном поле. Часть точек не попадает в рассмотрение.
Рис. 117. Поле принятия решений
Пусть мы попали в рабочую точку РТ. Проведем через нее линии параллельные осям. Данные линии разделили поле принятия решений на
четыре квадранта, которые получили название специальные названия.
Первый квадрант – конус предпочтения. Все точки в этом квадранте
отображают последствия более удачных во всех ситуациях решений.
Термин конус хорошо отображает анализ решений в многомерном пространстве ситуаций.
Третий квадрант – антиконус. Все точки в нем во всех ситуациях дают
худшие результаты, чем выигрыш, который предполагает рабочая точка.
Второй и четвертый квадранты называют областями неопределенности. При одной ситуации выигрыш в них больший, при другой – меньший чем в рабочей точке.
Движение в поле принятия решений начинается от начала координат.
Формируется линия предпочтения (в многомерном пространстве ситуаций – гиперповерхность), форма которой отображает выбранный тип
159
критерия. Данная поверхность движется вдоль направляющей, уравнение
которой также определяет выбранный критерий.
На рис. 118 приведен пример таких построений для одного из критериев принятия решений.
а
б
Рис. 118. Движение линии предпочтения K вдоль направляющей u
В первом случае рис. 118 а выше уровня предпочтения лежит пять точек и движение продолжается. В конце последняя точка на линии рис.
118 б выбирается решение (выше и правее линии предпочтения точек
нет). Это решение с индексом 6 - A6 предполагающее выигрыш - 38
или - 78 в зависимости от ситуации. Подробно построение линий предпочтения будет рассмотрено ниже.
Сложившаяся на сегодня методика поддержки принятия решений в
большинстве случаев рекомендует последовательное прохождение следующих этапов:
анализ ситуации с формированием матрицы решений;
выработку одного или нескольких критериев принятия решений
(задание оценочных функций);
определение номеров решений по выбранным критериям;
анализ полезности выбранных вариантов решений.
160
Данные этапы, как правило, повторяются несколько раз с постепенным уменьшением числа возможных решений и перечня анализируемых
ситуаций их применения. В системах искусственного интеллекта эти
процедуры также программируются с различной степенью адаптации алгоритмов и их параметров к изменению ситуаций в процессе существования системы.
Все компоненты матрицы решений, целевые функции неизбежно
имеют статистический характер, поэтому в процессе принятия решений
многократно применяются методы анализа случайных процессов и событий.
4.2. Классические критерии принятия решений
Ряд критериев принятия решений прошли достаточную проверку
практикой и стали базой для формирования других критериев. Это позволило их выделить в отдельную группу.
4.2.1. Минимаксный критерий принятия решения
Минимаксный критерий (ММ-критерий) занимает ключевое место в
технических решениях. Он полностью исключает риск и, при этом ограничении, дает наилучшее решение. Это позиция крайней осторожности.
Критерий предполагает формирование столбца оценочной функции с
выигрышами, которые можно получить в наихудших условиях реализации выбранного решения.
eri min ei, j .
j
Z MM max eri max min ei, j .
i
i j
А схема выбора решения
Ao Aio Aio A eio max min ei, j .
i j
Формула минимаксного критерия звучит следующим образом:
Выбирается множество оптимальных вариантов Ao , которое содержит
варианты Aio , принадлежащие множеству A и оценка eio максимальна
среди всех минимальных результатов возможных решений.
Рассмотрим пример. Пусть матрица решений содержит выигрыши от
четырех решений A , которые можно реализовать в четырех условиях F .
Его критерий
161
Таблица 13 содержит оценки условных выигрышей и упрощена исключением оценок функции принадлежности.
Таблица 13
F2
F1
A0
A1
A2
A3
F3
F4
60
55
62,5
62,5
35
57,5
77,5
67,5
20
62,5
92,5
65
10
67,5
82,5
100
Дополним ее столбцом er . Результат приведен в таблице 14.
Таблица 14
F1
A0
A1
A2
A3
F2
F3
F4
er
60
55
62,5
62,5
55
35
57,5
77,5
67,5
35
20
62,5
92,5
65
20
10
67,5
82,5
100
10
Максимальное значение выигрыша можно получить при отсутствии
риска в случае решения A0 и его величина составит 55 единиц.
Какие бы условия реализации выбранного решения не встретились
оно даст не меньший выигрыш, чем тот что запланирован по оптимальному решению.
Какие бы решения не принимались, любое из них даст в худших для
себя условиях меньший выигрыш чем оптимальное.
Применение ММ-критерия оправдано если:
О характеристических функциях принадлежности ситуаций F ничего
не известно;
Решение реализуется один или небольшое число раз;
Риск полностью исключается.
Сократим таблицу 13 до двух первых столбцов F1 и F2 .
Графическая интерпретация ММ-критерия для двух первых столбцов
матрицы решений таб. 13 приведена на рис. 119.
Точки в поле принятия решений дискретны. Вне них возможных решений нет. Оси e1 и e2 непрерывны и можно задать функцию предпо-
162
чтения. Функция предпочтения задается на основе оценочной функции
рассматриваемого критерия. В данном случае для двух ситуаций
min e1, e2 k ,
где k - текущий уровень рабочей точки.
Рис. 119. Функция предпочтения минимаксного критерия
Так как мы максимализируем результат, то, если есть хоть одна точка
выше данной линии необходимо увеличивать k . Уравнение задает конус,
грани которого параллельны осям ординат (К на рис. 119). На рис. 119
k =28, выше есть две точки поэтому необходимо увеличивать k . Вершина конуса движется по направляющей являющейся биссектрисой угла
оси ординат – функция u на рис. 119.
4.2.2. Критерий Байеса - Лапласа
Критерий Байеса – Лапласа (BL-критерий) максимализирует средний
выигрыш и допускает определенный риск. В реальной реализации выигрыш может быть существенно ниже, чем запланированный. Для его применения необходимо знать оценки вероятностей появления ситуаций.
Это случай массового применения решения при полном отсутствии
ограничения на риск.
Критерий предполагает формирование столбца оценочной функции с
выигрышами, которые дают средний результат многократного применения выбранного решения при всех ситуациях.
163
eri ei, j q j .
j
Z BL max eri max ei, j q j .
i
i j
А схема выбора решения
Ao Aio Aio A eio max ei, j q j q j 1 .
i j
j
Формула критерия Байеса – Лапласа звучит следующим образом:
Выбирается множество оптимальных вариантов Ao , которое содержит
варианты Aio , принадлежащие множеству A и оценка eio максимальна
среди всех оценок математических ожиданий результатов возможных
решений.
Рассмотрим пример. Дополним матрицу решений таб. 13 строкой содержащей оценки характеристических функций принадлежности выбранных ситуаций F общему пространству возможных внешних событий. Детально процесс получения оценок изложен в первом разделе.
Упростим их до оценок математических ожиданий вероятности появления ситуаций F1 , F1 , F3 , F4 . Результаты приведены в таблице 15.
Его критерий
0,1
F1
A0
A1
A2
A3
Таблица 15
0,08 0,75
F2
0,07
F3
F4
60
55
62,5
62,5
35
57,5
77,5
67,5
20
62,5
92,5
65
10
67,5
82,5
100
Умножим столбцы матрицы на оценки математических ожиданий вероятности появления ситуаций и дополним ее столбцом er , вычислив
его компоненты, как оценки математических ожиданий последствий
каждого из решений. Результат приведен в таблице 16.
Согласно схеме критерия Байеса – Лапласа найдем максимум er и по
его положению определим оптимальное решение – это A2 . Оно оценивает прогнозируемых выигрыш в 80,92 единицы. Он выше чем прогнози164
рует минимаксный – 55, но может составить и 20, если окажется сильно
заниженной оценка математического ожидания вероятности возникновения ситуации F1 . Т. о. присутствует риск не получения планируемого
выигрыша.
A0
A1
A2
A3
0,1
Таблица 16
0,08 0,75 0,07
F1
F2
F3
F4
er
6
4,4
46,88 4,375 61,65
3,5
4,6
58,13 4,725 70,95
2
5
69,38
4,55
80,92
1
5,4
61,88
7
75,28
Применение BL-критерия оправдано если:
характеристических функциях принадлежности ситуаций F хорошо
изучены и достоверность оценок их параметров достаточно высока;
Решение реализуется многократно;
Риск при небольшом числе реализаций допустим.
Реально риск отсутствует только при большом числе реализаций.
Это критерий длинных реализаций с резервными ресурсами и стабильным во времени видом и параметрами характеристических функций
принадлежности.
Для графической интерпретации сократим таблицу 15 до двух столбцов F1 и F3 изменив и q j . Столбцы F2 F4 убраны, как менее вероятные.
A0
A1
A2
A3
Таблица 17
0,15 0,85
er
F1
F3
60
62,5 62,13
35
77,5
71,13
20
92,5
81,63
10
82,5
71,63
Результаты представлены в таблице 17. Оценки выигрышей изменились
но несущественно, оптимальное решение прежнее.
Графическая интерпретация BL-критерия для выбранных столбцов
матрицы решений таб. 13 приведена на рис. 120.
165
Функция предпочтения задается на основе оценочной функции рассматриваемого критерия. В данном случае для двух ситуаций
e1 q1 e3 q3 k ,
где k - текущий уровень выигрыша. Это прямая линия
q
k
e1 3 e3 .
q1
q1
q
k
Угол ее наклона arctq 3 и смещение по оси e1 зависят от веq
q
1
1
роятностей ожидания возникновения ситуаций. Так как группа ситуаций
полная, то - от вероятности возникновения одного из них.
Так как мы максимализируем результат, то, если есть хоть одна точка
выше данной линии необходимо увеличивать k . Уравнение задает полуплоскость. Луч определяющий ее начало зависит от планируемого выигрыша k . Точки попавшие на нее более предпочтительны, чем рабочая.
Направляющая должна совпадать по направлению с движением точек
функции предпочтения при увеличении k и проходить через вершину
конуса предпочтения. Т. к. в нашем случае конус выродился в полуплоскость, то можно выбрать удобную точку. Пусть u проходит через начало
координат. Нормаль к u совпадает с направлением функции предпочтения.
Рис. 120. Функция предпочтения для критерия Байеса – Лапласа
166
На рис. 120 приведены полученные графики. Функция предпочтения
прорисована дважды при k 80 - K1 и при k 70 - K 2 . В первом случае
оптимальное решение определено однозначно (в полуплоскости одна
точка), во втором изменение k необходимо продолжать. Линия u на рис.
120 выглядит как не перпендикулярная к линиям K1 , K 2 . Это искажение обусловлено разным масштабом осей e1 и e3 . На рис. 118 также
представлены функции предпочтения построенные по критерию BL при
q 0,5 . BL – критерий для случая q j =const получил название нейтрального критерия.
4.2.3. Критерий азартного игрока или предельного оптимизма
Критерий азартного игрока (H-критерий) редко используется в технических решениях. Он ориентирован на получение наибольшего выигрыша без учета, каких либо ограничений налагаемых возможными ситуациями. Это позиция предельного риска. Но с другой стороны это позиция и предельного оптимизма.
Практически критерий ищет наибольший выигрыш в матрице решений и выбирает решение дающего его в одной из ситуаций.
Для сохранения структуры исследований рассмотрим порядок действий по стандартной схеме.
Критерий предполагает формирование столбца оценочной функции с
наибольшими выигрышами, которые можно получить при реализации
выбранного решения.
eri max ei, j
j
.
Z H max eri max max ei, j .
i
i j
А схема выбора решения
Ao Aio Aio A eio max max ei, j .
i j
Формула критерия предельного оптимизма звучит следующим образом:
Его критерий
167
Выбирается множество оптимальных вариантов Ao , которое содержит
варианты Aio , принадлежащие множеству A и оценка eio максимальна
среди всех максимальных результатов возможных решений.
Рассмотрим применение данного критерия на примере матрицы решений приведенной в таблице 13.
Дополним ее столбцом er . Результат приведен в таблице 18.
Максимальное значение выигрыша можно получить при отсутствии
риска в случае решения A3 и его величина составит 100 единиц.
Какие бы условия реализации выбранного решения не встретились
оно не даст большего выигрыша, чем тот что запланирован по оптимальному решению.
Какие бы решения не принимались, любое из них не даст большего
выигрыша чем оптимальное.
Таблица 18
F1
A0
A1
A2
A3
F2
F3
F4
er
60
55
62,5
62,5
62,5
35
57,5
77,5
67,5
77,5
20
62,5
92,5
65
92,5
10
67,5
82,5
100
100
Применение Н-критерия оправдано если:
О характеристических функциях принадлежности ситуаций F ничего
не известно;
Решение реализуется один или небольшое число раз;
Риск оправдан необходимостью получения предельного и менее выигрыша.
Сократим таблицу 13 до двух первых столбцов F3 и F4 .
Выбор их обусловлен наличием в одном из них выбранного выигрыша и высокой вероятностью появления ситуации для второго.
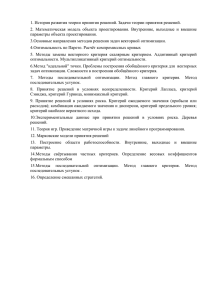
Графическая интерпретация H-критерия приведена на рис. 121
( k =88).
Функция предпочтения задается на основе оценочной функции рассматриваемого критерия. В данном случае для двух ситуаций
max e3 , e4 k .
168
Рис. 121. Функция предпочтения критерия придельного оптимизма
Уравнение задает конус, грани которого параллельны осям ординат.
Но по сравнению с ММ – критерием конус предпочтения как бы вывернулся. Если есть хоть одна точка выше или правее него, то необходимо
увеличивать k . На рис. 121 k =88, выше есть две точки, поэтому необходимо увеличивать k . Вершина конуса движется по направляющей являющейся биссектрисой угла оси ординат – функция u.
4.2.4. Критерий Сэвиджа
Критерий Сэвиджа (S-критерий) предполагает все ситуации равно вероятными и стремится снизить потери, которые могут возникнуть при
выборе решения не оптимального для данной ситуации.
Такое целевое устремление требует преобразования матрицы, появляется связь между данными внутри столбца.
Новые компоненты s новой матрицы решений имеют отличный от
начального смысл.
si, j max ei, j ei, j .
i
Рассмотрим это преобразование на примере матрицы решений таб. 13.
Выходной результат представлен в таблице 19.
Новые элементы таблицы приобрели вид по сути потерь, от принятых
решений, если выпала ситуация, в которой априори можно было принять
169
лучшее решение. Оптимальным решением для данной ситуации является
решение с нулевым значением si .
Таблица 19
A0
A1
A2
A3
F1
F2
F3
F4
0
12,5
30
37,5
25
10
15
32,5
40
5
0
35
50
0
10
0
Далее схема действий аналогична схеме минимаксного критерия.
Ищем наихудший результат в строках. Компоненты изменились по
смыслу, это не выигрыши а потери, поэтому min меняется на max и
наоборот.
Критерий предполагает формирование столбца оценочной функции с
наибольшими потерями, которые предполагает выбранное решение относительно наилучшего при его реализации в конкретной ситуации.
sri max si, j .
j
Далее минимизируются потери от возможных решений.
Его критерий Z S min sri min max si, j .
i
i j
А схема выбора решения
Ao Aio Aio A eio min max max ei, j ei, j .
i j i
Результаты действий приведены в таблице 20.
Таблица 20
A0
A1
A2
A3
F1
F2
F3
F4
sr
0
12,5
30
37,5
37,5
25
10
15
32,5
32,5
40
5
0
35
40
50
0
10
0
50
170
Решение дающее гарантию минимальных потерь относительно оптимальных решений, которые могли бы быть приняты, если бы априори
была известна ситуация их реализации, - A1 .
Формула критерия Сэвиджа звучит следующим образом:
Выбирается множество оптимальных вариантов Ao , которое содержит
варианты Aio , принадлежащие множеству A и оценка eio минимальна
среди всех оценок потерь от выбора не наилучших решений при конкретной ситуации.
Применение S - критерия оправдано при сложных условиях анализа
близких по выигрышу решений. Критерий допускает риск в исходной
матрице решений e , но в матрице потерь s риск исключается. Можно
сказать так, мы не знали что случится, но мы проиграли меньше, чем
могли бы от действий наилучшего в данной ситуации агента.
Графическая интерпретация S - критерия для матрице потерь s аналогична минимаксной, т. к. данный критерий использует в матрице потерь
схему минимаксного критерия.
В исходной матрице e построение усложняется тем что оси переворачиваются и смещаются. Это разрывает конус предпочтения минимаксного критерия и переворачивает его. Появляются две зоны, в которых
ищутся решения.
4.2.5. Критерий произведений
Критерий произведений (P-критерий) не часто применяется в технических задачах, но его своеобразность, слабая связь с выше описанными
позволяет его так же отнести к классическим.
Оценочная функция по строкам формируется как произведение выигрышей. Мы, что бы не потерять размерность и наглядность, извлечем из
полученного результата еще и корень размерности типов ситуаций. Положение максимума при этом не меняется.
eri n ei, j .
j
Рассмотрим формирование нового столбца на примере матрицы решений таб. 13. Выходной результат представлен в таблице 21.
Критерий предполагает формирование столбца оценочной функции с
выровненными выигрышами, которые дает выбранное решение.
171
Оценочная функция в приведенной форме дает лучшие результаты при
примерном равенстве выигрышей в строке. Это свойство среднего геометрического хорошо известно.
Таблица 21
A0
A1
A2
A3
F1
F2
F3
F4
er
60
55
62,5
62,5
59,92
35
57,5
77,5
67,5
56,96
20
62,5
92,5
65
52,36
10
67,5
82,5
100
48,58
Используют и логарифмическую форму представления оценочной
функции критерия произведений.
erln ln ei, j .
i
j
Ее максимум так же совпадает с максимумом er . Поэтому финишный
результат не меняется. Выбор за исследователем.
Далее ищется лучший вариант в столбце er и определяется номер решения.
Критерий Z P max eri max ei, j .
i
i j
А схема выбора решения
Ao Aio Aio A eio max ei, j .
i j
В приведенном примере критерий произведений рекомендует решение A0 (таблица 21). В данном случае оно совпало с минимаксным.
Формула критерия произведений звучит следующим образом:
Выбирается множество оптимальных вариантов Ao , которое содержит
варианты Aio , принадлежащие множеству A и оценка eio максимальна
среди всех оценок произведений полезности от любого из решений.
Применение P - критерия рекомендуется в следующих условиях:
Все последствия решений положительны;
Все ситуации примерно равновероятны и с каждым из них необходимо считаться в равной мере;
172
Критерий применим в основном при малом числе реализаций;
Риск допускается.
Ограничение на положительность, вернее на однородность знака компонентов матрицы решений можно ослабить. Для этого вводится постоянная составляющая, т. е. ко всем компонентам прибавляется смещение.
Однако следует учитывать то, что уровень постоянной составляющей
может нивелировать сглаживающее действие критерия и номер решения
измениться.
Графическое представление операции выбора решения выполним на
тех же данных, которые использовались при анализе BL-критерия.
Функция предпочтения задается на основе оценочной функции рассматриваемого критерия. В данном случае для двух ситуаций
e1 e3 k ,
где k - текущий уровень выигрыша. Это семейство гипербол
k
e1 .
e3
Эти гиперболы прилегают к лучам конуса предпочтения ММ – критерия.
Рис. 122. Функция предпочтения для критерия произведений
173
Так как мы максимализируем результат, то, если есть хоть одна точка
выше или правее данной линии необходимо увеличивать k .
Направляющая должна совпадать по направлению с движением точек
функции предпочтения при увеличении k и проходить через вершину
конуса предпочтения. Это биссектриса осей ординат.
На рис. 122 приведены полученные графики. Функция предпочтения
прорисована дважды при k 300000 - K1 и при k 100000 - K 2 . В первом случае оптимальное решение определено однозначно (в полуплоскости одна точка), во втором изменение k необходимо продолжать.
4.2.6. Расширенный минимаксный критерий
Данный критерий более сложен и содержит в себе действия более
характерные, например, BL-критерию. По сути по ММ-критерию он создает только расчетную ситуацию. Данная схема принятия решения допускает определенный риск.
Пусть информация о виде характеристических функций принадлежности выбранных ситуаций F общему пространству возможных внешних событий не полная. Можно говорить о семействе векторов описаний
ситуаций или о множестве n - мерных векторов W n .
Пусть по каждому вектору принимаются решения Ei , i var . Появляется вероятность pi , отображающая частоту принятия решения Ei .
Среднее значение выигрыша
e p, q ei, j pi q j получено в множестве W n .
i
j
Целью применения критерия является выбор оптимального вектора
генерации решений p p1,..., pi ,... pm .
Схема расширенного минимаксного критерия выглядит как
A po A po A po A e po , qo max min ei, j pi q j .
q i j
p
Она ориентируется на наихудшее распределение q из W n и при этом
ищет лучший вариант.
Рассмотренные классические критерии можно сравнить между собой
прежде всего по виду целевой функции, который зависит от точки зрения
174
эксперта или заложенного в систему принципа сохранения функционирования.
Практически все примеры выбрали различные решения:
A0 - ММ-критерий;
A2 - BL-критерий;
A3 - H-критерий;
A1 - S-критерий.
Это естественно, так как все возможные решения имеют смысл и целесообразны в том или ином случае.
4.3. Производные критерии принятия решений
Формирование производных критериев идет в основном по двум схемам:
Формирование оценочной функции как взвешенной суммы оценочных функций классических критериев;
Установление по базовому критерию нижнего уровня риска и введение допуска на его превышение. Далее по более обнадеживающему
критерию поиск нового решения в пределах установленного допуска.
4.3.1. Критерий Гурвица
Критерий HW предполагает формирование оценочной функции как
комбинации минимаксной и предельно оптимистической функций.
eri c min ei, j 1 c max ei, j ,
j
j
где c - весовой множитель.
Критерий HW
Z HW max eri .
i
А схема принятия решения
c
min
e
1
c
max
e
i, j
i , j
Ao Aio Aio A eio max
j
j
.
i
0 c 1
175
Правило выбора по HW-критерию:
Матрица решений дополняется столбцом, содержащим линейную
комбинацию наибольшего и наименьшего для каждой строки. Выбираются те варианты E , в строках которых находятся наибольшие элементы этого столбца.
Весовой множитель c (0...1) определяет степень доверия к ММкритерию относительно критерия азартного игрока.
Обычно рекомендуют применять данный критерий, если
о вероятности появления событий F ничего не известно, поэтому в
равной мере надо считаться со всеми,
реализуется небольшое количество решений,
риск допускается.
4.3.2. Критерий Ходжа – Лемана
Критерий Ходжа – Лемана (HL-критерий) формирует оценочную
функцию, как линейную комбинацию функций MM- и BL-критериев.
eri v ei, j q j 1 v min ei, j ,
j
j
где v - (0...1) весовой множитель характеризующий степень доверия
к BL-критерию относительно MM-критерия.
Критерий HW
Z HL max eri .
i
А схема принятия решения
v ei, j q j 1 v min ei, j
Ao Aio Aio A eio max j
j
.
i
0 v 1
Правило выбора по HL-критерию:
Матрица решений дополняется столбцом, содержащим линейную
комбинацию среднего и наименьшего для каждой строки. Выбираются те
варианты E , в строках которых находятся наибольшие элементы этого
столбца.
176
Критерий полагает многократное применение решения, стремится
поднять средний выигрыш, но с ограничением на риск, выраженным
через степень доверия к BL – критерию.
4.3.3. Критерий Геймейера
Критерий Геймейера (G-критерий) ориентирован на выбор среди
близких по эффективности решений и матрицу решений представленной потерями.
eri min ei, j q j .
j
Критерий G
Z G max eri .
i
А схема принятия решения
Ao Aio Aio A eio max min ei, j q j ei, j 0 .
i j
Наиболее определен он в расходных экономических задачах. При
q j const он превращается в ММ-критерий.
При наличии в исходной матрице решений ei , j 0, все компоненты
матрицы могут быть уменьшены на определенную величину. Не надо
стремиться выбрать ее большой, т. к. введение смещения может изменить результат итогового выбора.
В отличии от ММ-критерия данный учитывает вероятность появления
ситуаций и устраняет риск пропуска наиболее неблагоприятной ситуации с учетом вероятности ее появления. Устраняется риск в многократно
повторяющемся решении. Таким образом расширяется действие ММкритерия.
4.3.4. BL(MM) критерий
Данный критерий относится ко второй группе производных критериев. Критерии этого типа получили название составных.
Его база – ММ-критерий.
Опорное значение eio , jo получается, как оценочная функция
eio , jo Z MM max min ei, j ,
i
177
j
где io , jo - индексы оптимального решения, принятого по ММ-критерию
и ситуации, которая определила это решение.
Далее вводится некоторый допуск на риск >0, который позволяет
отсортировать решения, последующее использование которых не должно
дать больших потерь, относительно опорного, чем допускаемые.
На практике один из вариантов пересортировки заключается в выборе
индексов удовлетворяющих оговоренному условию (подмножество I1
множества индексов {1, ..., i, ..., m}) и вычеркивании строк с прочими
индексами.
I1 i i 1,...,m eio , jo min ei, j .
j
Не редко, что бы оправдать риск, из оставшихся берут в расчет только
явно прибыльные решения. Например, требуют что бы в выбранной
строке (решение, претендующее на включение в новую матрицу) имелся
выигрыш превышающий максимальный выигрыш, который есть в опорной строке и это превышение было большим чем максимальный проигрыш относительно опорного, который также есть в этой строке.
I 2 i i 1,...,m max ei, j max eio , j i
j
j
где i eio , jo min ei, j - наибольшие возможные потери при принятии
j
Ai в сравнении с задаваемыми ММ-критерием.
Схема принятия решения
Ao Aio Aio A eio max ei, j q j .
iI1 I 2 j
Правило выбора трактуется следующим образом.
По ММ – критерию определяется планируемый выигрыш – опорное
значение и опорное решение.
Матрица решений дополняется тремя столбцами.
В первом записываются математические ожидания строк.
Во втором разности между опорным значением и наименьшим значением выигрыша в строке (проигрыш от опорного).
В третьем столбце формируются разности между наибольшим выигрышем в рассматриваемой строке и наибольшим значением выигрыша в опорной строке.
178
Выбираются те строки у которых значения во втором столбце
меньше допуска.
Из выбранных строк выбираются только те у которых значения в
третьем столбце выше значений во втором столбце.
В новой матрице ищут решения по BL – критерию.
Если новая матрица не содержит строк оптимальным решением
становится опорное.
Критерий рекомендуется применять если
Вероятности появления ситуаций определены с большими доверительными интервалами;
Необходимо считаться со всеми ситуациями;
Допускается риск и допуск задан;
Решение планируется применить неоднократно.
Критериев построенных по данной схеме несколько. Каждый из них
имеет разновидности, особенно в плане формулировки определения эффективности включаемого в новую матрицу решения по сравнению с
опорным.
Эти критерии как правило при определенном значении параметров,
допусков и т. п. переходят в классические.
Существует общий подход к построению гибких критерием, обобщающий известные.
4.4. Гибкий критерий принятия решения
Рассмотренный ниже критерий детально с примерами применения в
технических задачах приведен в работе Мушака-Мюллера [18]. Представим его в несколько упрощенном виде.
Схема принятия решения
Ao Aio Aio A G1 G 2 G3,
где G1, G 2 - условные ограничения, а G 3 - Z r -гибкий критерий принятия решения.
Рассмотрим их по отдельности. Первое условие задает ограничение на
достоверность априорных данных об оценках характеристических функций принадлежности выбранных ситуаций F общему пространству
возможных внешних ситуаций. Это ограничение выглядит в одном из
вариантов, как
V i Vd ,
179
где V i - доверительный фактор, например, эмпирический определяемый на основании упорядоченной выборки x1,..xn по формуле
~
V i
x1i
x1i
,
где x1i - минимальное (наиболее не благоприятное) значение параметра,
отобранное для i - решения, - оценка математического ожидания дан~
ного параметра, - наиболее неблагоприятная для последствий решения граница оценки математического ожидания при заданной веро~
ятности ошибки принятия решения о значении . Доверительный
фактор V изменяется от 0 до 1. Верхнее значение соответствует достоверной информации о величине . Доверительный фактор вычисляется для каждой строки, таким образом он индивидуален для каждого
решения. Индивидуально и определение x 1 . Для каждого решения, как
i
правило, есть свой наиболее не благоприятный фактор – ситуация ( x1i ).
Выше сказанное говорит о том, что при анализе эмпирических данных
стремятся прижаться к нижней, наиболее неблагоприятной границе
оценки параметров, что бы обеспечить достоверность ММ-критерия.
Vd - максимально допустимый доверительный фактор. При его достижении вес BL-критерия не повышается.
Второе ограничение
G 2 Z MM min ei, j ,
j
по сути является допуском на превышение опорного значения риска
определяемого согласно ММ-критерия.
Оба ограничения учитываются в схеме решения по или. Их использование зависит от объема экспериментальных, а при применении отличной от написанной формулировки доверительного интервала вообще
априорных данных о функциях принадлежности ситуаций.
Возможна и проверка обеих ограничений. Строки не удовлетворяющие ограничениям из расчетов исключаются.
Гибкий критерий принятия решения находит максимум от оценочной
функции, близкой к функции BL (MM)-критерия.
180
Z r max V i ei, j q j 1 V i min ei, j i .
i
j
j
Вновь доверительный фактор, теперь он играет роль коэффициента
доверия BL-критерия. Рассмотрим более детально его специфику. Доверительный фактор опирается на наиболее не благоприятную ситуацию
или ее параметр при принятии конкретного решения.
В целом ei , j - матрица случайных чисел для каждого i и j . Как правило факторы влияющие на полезность решения разбивают на зоны,
формируя в множестве J ( j J ) подмножества J d , где d - порядковый
номер подмножества. Однако, редко это дробление настолько мелко, что
бы обеспечить ei, j const .
Даже в однокритериальных задачах в каждой ячейке матрицы решений находится случайная функция какого то параметра.
При превышении приращения параметра определенной границы меняется номер - d и как следствие номер ситуации j . Таким образом в
общем поле матрицы имеются зоны влияния одного параметра, его изменение меняет и номер ситуации и в более малом масштабе последствия решения Ai при ситуации F j .
Влияние этого параметра на последствие решения оценивается его релевантностью или одной из ее форм - коэффициентом влияния. Детально
это свойство рассматривается в теории чувствительности, достаточно детально проработанной в технических приложениях, например, в схемотехнике электронных устройств.
Если рассмотреть гладкую, без смена знака однопараметрическую релевантность и вернуть ei , j ее зависимость от параметра x1i , j в зоне ре-
шения Ai при возникновении ситуации F j - ei , j x1i , j можно получить
упрощенную числовую оценку абсолютной релевантности в данной точке.
Ria, j x1
max ei, j x1li, j min ei, j x1li, j
l
ei, j
l
,
где l - смещение параметра x1i , j в рассматриваемой зоне.
181
В качестве точки исследования выбирается обычно точка, выносимая
при формировании минимаксного решения в столбец оценочной функции.
Значимость выбранного параметра вычисляют с учетом энтропии параметра x1i , j , зависящей от вероятности появления смещения l .
Bx1i, j Ri, j x1 H x1li, j
где значение энтропии вычисляется по формуле
,
H x1li, j ql ln ql .
l
Исследовав влияние различных параметров выбирают x1i , j или комбинацию параметров, наиболее влияющих на ei , j .
Надо заметить то, что математические модели используемые в ТПР
достаточно громоздки, можно сказать здесь идет «разгул» статистики,
так как нечеткость постановки самой задачи переплетается с нечеткостью определения элементов матрицы решений, описаний ситуаций, да и
самих решений.
Трактовка метрики пространств параметров в понятиях предметной
области, для которой ведется анализ возможных решений и их последствий, еще более усложняет понимание правильности выводов теоретических концепций.
Упрощение моделей позволяет нам выдержать понятийный уровень
методик решения задач.
Введение автоматического определения коэффициента доверия BLкритерия делает гибкие алгоритмы не зависимыми от человека, способными функционировать в автономном режиме.
Конкурирующий с BL-критерием, ММ-критерий также видоизменен.
В его формулировку введено смещение i .
i min , d ,i ,
где d,i - индивидуальный допуск на превышение минимального значения выигрыша в i - решении.
Здесь проведена не сортировка решений, а повышен уровень возможного выигрыша индивидуальный для каждого решения.
В принципе в полном объеме гибкий критерий Мушака-Мюллера
включает и вычеркивание строк не допустимых решений.
182
Рассмотренный критерий позволяет рассматривать задачи с конкретными условиями и ориентироваться практически только на те эксперименты, измерения которые проведены для решения данной задачи.
Он более пригоден для автоматизации, практически все его параметры
вычисляются по результатам наблюдений за исследуемым процессом. Он
обладает и признаками самоорганизации.
4.5. Адаптивный критерий Кофлера-Менга
Данный критерий по своей сути близок к минимаксному, но несколько усложнен. Анализ данного критерия говорит о «бирнуллизации»
ММ-критерия. По Бернулли при поиске оптимального решения стремятся максимализировать математическое ожидание результата.
По критерию Кофлера-Менга в распоряжении системы принимающей
решение имеется и постоянно дополняется информация о виде и параметрах вероятностных распределений Q внешних ситуаций.
Предлагается разбить пространство множеств вероятностных распределений на непересекающиеся подмножества B j .
B B j , Bv B j ø для v j ( v , j - 1, 2, ...).
j
Вводятся оценки p j , адаптивно изменяющиеся, вероятностей появления B j .
dQ p j , p j 1.
j
Bj
При появлении ситуации F j B j и принятии решения Ai его результат e F j , Ai желательно максимализировать выбором i .
Критерий Кофлера-Менга (КМ-критерий) записывается в виде
Z KM max inf e F j , Ai dQ ,
Ai AQQ *
B
j
где Q* - полное информационное множество, достаточное для принятия
решения с максимальной достоверностью его оптимальности, inf QQ *
183
нижняя в смысле выигрыша (наихудшего результата) граница пространства Q .
Множество априорных вероятностных распределений образует конечномерный симплекс.
Частичная информация Q состоит в знании собственного подсимплекса (не вырождающегося до одного распределения) P .
При реализации решения может учитываться релевантности выделенной ситуации к изменению объема информации.
4.6. Принятие решений по нескольким критериям
Значительные ресурсы вычислительных мощностей предоставляемые
современными интеллектуальными системами, позволяют определить
номера оптимальных решений, промоделировав и неопределенность в
описаний ситуаций. В этом случае, наряду с исходным описанием задачи
(таблица 22), появляются и множественные результаты ее возможного
решения. Представим эти данные так же в виде таблицы 23.
Таблица 22
q1
F1
...
qj
...
Fj
...
...
qn
Fn
p1
A1
e1,1
...
e1, j
...
e1, n
...
pi
...
Ai
...
ei ,1
...
...
...
ei , j
...
...
...
ei , j
...
pm
...
Am
...
em,1 ...
...
...
em, j ...
...
em, n
Таблица 23
MM
ММ
A1
p MM 1
...
Ai
...
...
Am
p MM i
...
p MM m
...
...
...
BL
...
...
...
...
...
BL
p BL1
p BL i
...
p BL m
184
...
...
...
KM
...
...
...
...
...
KM
p KM 1
p KM i
...
p KM m
Новая таблица – таблица мнений экспертов заполнена результатами
анализа исходной матрицы решений по имеющимся критериям. В ячейки
таблицы помещены вероятности появления рекомендаций применения
данного решения по конкретному критерию. Таблица открыта для расширения. Новые критерии добавляют столбцы.
p XX i 1 для всех XX ,
i
где XX - символьный индекс критерия (ММ – минимаксный критерий,
BL – критерий Байеса-Лапласа , KM – критерий Кофлера-Менга и т. д.).
Коэффициенты доверия критериям XX в каждой предметной области (распознавание образов в радиолокации, медицинская диагностика,
торговые операции с комплектующими для офисных компьютеров, рабочих станций разработчиков важных проектов и т. п.) формируются на
базе опыта и имеющихся в данной области знаний. Коррекция текущих
значений коэффициентов также возможна. В принципе при назначении
коэффициентов учитываются корреляционные связи между критериями.
XX 1.
XX
В ячейках таблицы могут встречаться и нулевые значения. По аналогии с методикой принятия решений, рассмотренной в работе с большинством критериев добавим столбец.
pri p XX i XX .
XX
Пример заполнения таблицы мнений экспертов и расчета оценочной
функции рекомендаций экспертов приведен в таблице 24.
A1
A2
A3
A4
A5
Таблица 24
0,05
0,05
Крит. 3 Крит. 4
0,2
0,1
0,1
Крит. 1
0
0,7
Крит. 2
1
0,1
Крит. 5
0,9
0,805
0,8
0
0,2
0,2
0,05
0,105
0,1
0
0,2
0,5
0,05
0,05
0,05
0
0,2
0,05
0
0,0175
0,05
0
0,2
0,15
0
0,0225
p ri
Наряду с оценочной функцией рекомендаций экспертов целесообразно составить и оценочную функцию выигрышей от применения страте185
гии рекомендаций экспертов. Она формируется по описанной выше методике.
Мнение экспертов может быть использовано в итоговом принятии
решений в различных стратегиях.
Две крайние стратегии рассмотрим подробнее.
Первая стратегия предполагает многократную реализацию многих
решений. Такой вариант возможен в гибких производствах, когда реально в выпуске изделий изменять их параметры. Он возможен и при масштабном внедрении решений осуществляемых в различных системах.
Назовем эту стратегию рыночной.
Вторая подразумевает принятие одного решения и его реализацию в
одном или во многих изделиях. Назовем эту стратегию ограниченной.
Целесообразность такой стратегии обычно обусловлена высокими затратами, которые необходимо осуществить на реализацию каждого типа
решений. Такая обстановка возникает при разработке приборов автоматизации научных исследований, крупномасштабных проектов, в медицинской диагностике и т. п.
В ограниченной стратегии критерий
Z LS max p XX i XX ,
i XX
а схема принятия решения
Ao Aio Aio A p XX io max p XX i XX .
i XX
Ограниченная стратегия рекомендуется к применению при следующих условиях:
Отсутствует возможности реализации нескольких решений, из-за
их высокой стоимости или малого объема реализаций;
Имеется опыт использования различных критериев в данной предметной области или теоретические наработки по степени доверия различным критериям;
Практически отсутствует конкуренция и противодействие в данной
предметной области.
В рыночной стратегии целью анализа матрицы мнений экспертов
(таблица 23) является
упорядочение множества решений по значению p ri ,
186
ограничение размера множества решений снизу по допуску на минимальное значение p ri с ее нормировкой,
формирование последовательности (очереди) реализации решений.
4.7. Принятие решений с распознаванием образов
В теории управления широко используется модель черного ящика.
Входное воздействие через функцию выходов, зависящую от заполнения
этого «ящика» вырабатывает управляющее воздействие. Это самая простая и самая сложная модель.
Простота ее в малом числе переменных.
Сложность в предельной непознанности структуры этих переменных
и их взаимосвязи.
Рис. 123. Принятие решения с распознаванием образов
На рис. 123 представлена упрощенная схема принятия решений с анализом внешней ситуации.
187
Исходный цикл - распознавание образов.
Входные переменные X представлены N мерным вектором. Реально
измеряется или очувстволяется n компонент, n N . На базе вектора
x1,..., xi ,..., xn ранжированного по степени влияния (релевантности),
формируется набор признаков – алфавит признаков П характеризующих
текущую ситуацию.
Ситуация в априорном словаре ситуаций представлена набором классов 2. В результате анализа признаков вырабатываются версии 1 о
принадлежности текущего описания объекта одному из классов.
При этом проверяется достоверность, например как в раннее рассмотренном случае двух классов определялась ошибка первого рода и ошибка
второго рода.
По матрице рисков e1 принимается решение об идентификации объекта, как реализации одного из классов 2, или увеличения объема информации – запрос Y 1. При этом могут проводится дополнительные
съемы данных в выбранном множестве компонент, или увеличиваться
число n .
Данный процесс получил название итерационного, его цель увеличение объема данных для достижения требуемого уровня достоверности
оценки принадлежности объекта к определенному классу.
После достижения требуемого уровня достоверности, информация о
индексах классов и оценок вероятностей их реализации Q поступает в
следующую ступень – принятия решений.
При принятии решений на базе поступившей информации формируется описание текущей ситуации по крайней мере в виде двух векторов
F, q .
Принятие решений через критерии и с учетом матрицы последствий
решений e 2 принимается одно или несколько решений, претендующих
на оптимальность. В виде вектора управления Y 2 эти решения передаются на объект.
В случае решения экономических задач в состав вектора X входят и
финансовые поступления. Часть их остается внутри системы, стимулируя ее работу. Объем этих поступлений служит индикатором правильности принимаемых решений.
Объемы рисков закладываемые при поиске более оптимальных решений, могут быть достаточно велики (при анализе производных критериев
мы закладывали величину риска , подчеркивая ее незначительность).
188
Например, один из принципов ведения бизнеса в процветающей компании ACER (Тайвань) звучит примерно так:
Не следует рисковать, если не можешь позволить себе проиграть
то ради чего сражаешься.
Как видно, объем риска в системах не связанных с жизнью и здоровьем людей может быть весьма значителен.
В экономических приложениях ТПР много внимания уделяется распределению полученных прибылей внутри системы. В технических задачах этот вопрос мало исследован, хотя для интеллектуальных систем он
актуален, как стратегия правильного стимулирования развития системы.
Массив отображающий распределение части прибыли ei , j в пользу
агента W j согласно решения Ai представлен в таблице 25.
Таблица 25
W1
...
Wj
...
Wm
A1
e1,1
...
e1, j
...
e1, n
...
Ai
...
ei ,1
...
...
...
ei , j
...
...
...
ei , j
...
Am
...
em,1 ...
...
...
em, j ...
...
em, n
Не смотря на специфику задачи рекомендуемые критерии схожи с
рассмотренными.
Например, эгалитарный критерий по Роллсу увеличивает доходы
наиболее неудачного агента
max min ei, j .
i j
Критерий Харшаньи дает максимум интегрального результата
max ei, j .
i j
Синергетический критерий Бекмана ориентируется на комбинацию
классического утилитарного и относительного эгалитарного подхода.
189
max ei, j a f ei,1,...,ei, n ,
i j
где a - весовой коэффициент при f - учитывающая минимальные доходы агентов.
Принятие решений в среде интеллектуальных объектов имеет свою
специфику. В среде противодействующих систем в состав вектора X
входят данные маскируемые, целенаправленно изменяемые данные, призванные изменить решения в сторону меньших выигрышей.
ПРИЛОЖЕНИЕ
Примерное распределение материала по лекциям
№
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Тема лекции
Предмет курса. Литература. Введение.
Случайные события, процессы, потоки, смеси
Элементарные свойства оценок
Распознавание в математической статистике
Риск и его описание. Модели полезности.
Системы распознавания. Алфавит признаков.
Распознавание объектов по цвету
Распознавание по типу индикатрисы отражения
Корреляционные алгоритмы распознавания
Корреляционные алгоритмы распознавания
Распознавание схожих объектов ч. 1
Распознавание схожих объектов ч.2
Распознавание объектов по косвенным признакам
Распознавание объектов по косвенным признакам
Формальная структура ПР
Классические критерии ПР
Производные критерии ПР ч.1
Производные критерии ПР ч.2
Гибкий критерий принятия решения
Принятие решений с распознаванием образов
190
Стр.
4...8
9...19
20...29
30...39
40...48
49...60
60...69
70...82
82...93
93...101
101...110
110...120
120...129
129...138
150...158
158...167
167...173
173...177
177...183
183...190
Литература
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
Кузин Л. Т. Основы кибернетики. Т.1. Математические основы кибернетики.
Учеб. пособие для вузов. М. Энергия, 1973, 504 с.
Гихман И.И., Скороход А.В. Введение в теорию случайных процессов. - 2-е изд,
М. Наука, 1977, 568 с.
Ширяев А. Н. Вероятность. Учеб. пособие для вузов. М. - 2-е изд, М. Наука,
1989. – 640 с.
Нильсон Н. Принципы искусственного интеллекта. М. Мир. 1985. 376 с.
Александров А.Г. Оптимальные и адаптивные системы: Учеб. Пособие для вузов
по спец. “Автоматика и управление в технических системах”. М Высш. шк. 1989.
263 с.
Современные методы идентификации систем. Под. ред. Эйкхофа. Пер. с англ. М.
Мир. 1983. 400 с.
Гинзбург В. М. Формирование и обработка изображений в реальном времени:
Методы быстрого сканирования. – М.: Радио и связь, 1986. – 232 с.
Цифровая обработка телевизионных и компьютерных изображений / Под ред.
Ю.Б. Зубарева, В. П. Дворковича. – М.: 1997. 212 с.
Быков Р.Е., Гуревич С.Б. Анализ и обработка цветных и объемных изображений.
– М.: Радио и связь, 1984. 296 с.
Себестиан Г.С. Процессы принятия решений при распознавании образов. Пер. с
англ. Под ред. В.И. Иваненко. К Техника. 1965. 152 с.
Вапник В.Н.. Червоненко А.Я. Теория распознавания образов (Статистические
проблемы обучения) М. Наука. 1974. 416 с.
Дуда Р., Харт П. Распознавание образов и анализ сцен. Пер. с англ. М.
Мир.1976. 512 с.
Гренандер У. Лекции по теории образов: Синтез образов. Пер. с англ. М. Мир
1979. 384 с.
Гренандер У. Лекции по теории образов: Анализ образов. Пер. с англ. М. Мир
1981. 448 с.
Гренандер У. Лекции по теории образов: Регулярные структуры. Пер. с англ. М.
Мир 1983. 432 с.
Патрик Э. Основы теории распознавания образов: Пер. с англ. Под ред. Б.Р.
Левина М. Сов.радио, 1980. 408 с..
Горелик А.А., Скрипкин В.А. Методы распознавания: Учеб. пособие для вузов. 3е изд., перераб. И доп. М. Высш. шк., 1989. 232 с.
Мушик Э., Мюллер П. Методы принятия технических решений. Пер. с нем. М.
Мир, 1990. 208 с.
Заде Л. Понятие лингвистической переменной и ее применение к принятию приближенных решений. М.: Мир, 1976. 165 с.
Обработка нечеткой информации в системах принятия решений./ А. Н. Борисов
и др. – М.: Радио и связь, 1989. – 304 с.
Борисов А. Н., Крумберг О. А., Федоров И. П. Принятие решений на основе нечетких моделей: Примеры использования. – Рига.: Зинатне, 1990. – 184 с.
Иваненко В. И., Лабковский В.А. Проблема неопределенности в задачах принятия
решений.; Отв. Ред. Скороход А. В. АН УССР. – Киев: Наук. Думка, 1990. – 136
с.
191
23. Носибов Э.Н. Методы обработки нечеткой информации в задачах принятия решений. – Баку: Элм, 2000.
24. Закриевский А.Д. Логика распознавания. Мн. Наука и Техника, 1988. 118 с
25. Максимов С.И. Теория полезности и принятия решений: Обзор. – Мн.: РИВШ
БГУ, 1997. – 32 с.
26. Курбацкий А. Н., Чеушев В. А. Информационный метод анализа и оптимизации в
системах поддержки принятия решений. – Мн.: ИТК НАН, 1999. _200 с.
27. Смородинский С.С., Батин Н.В. Методы и системы принятия решений. В двух
частях. Часть 1. – Мн. БГУИР. 2000 – 96 с. Часть 2. – Мн. БГУИР. 2001. – 80 с.
28. Смородинский С.С., Батин Н.В. Методы анализа и принятия решений в слабоструктурированных задачах. – Мн. БГУИР. 2002 – 116 с.
29. Селекция и распознавание на основе локационной информации. /А.Л. Горелик,
Ю.Л. Барабаш, О.В. Кривошеев, С.С. Эпштейн/ - М. : Радио и связь, 1990. – 239
с.
30. Ларичев О.И., Мошкович Е.М. Качественные методы принятия решений. Вербальный анализ решений. – М.: Наука, 1996.
31. Саати Т. Принятие решений. Метод анализа иерархий. Пер. с англ. – М Радио и
связьЮ 1993. – 320 с.
32. Осипов Г.С. Приобретение знаний интеллектуальными системами. Основы теории и технологии. – М.: Наука, 1997.
33. Вагин В.Н., Еременко А.П. Некоторые базовые принципы построения интеллектуальных систем поддержки принятия решений в реальном времени. Изв. АН.
Теория и системы управления. 2001,№6, с. 114-123.
34. Вилкас Э. И. Оптимальность в играх и решениях. – М.: 1990. – 256 с.
35. Теория выбора и принятия решений. – Учебное пособие. – М.: Наука. 1982. – 328
с.
36. В. А. Горелик В. А., Горелов М. А., Кононенко А. Ф. Анализ конфликтных ситуаций в системах управления. – М.: Радио и связь, 1991. – 288 с.
37. Мулен Э. Кооперативное принятие решений: Аксиомы и модели. М. Мир, 1991.
464 с.
38. Ларичев О.И. Мошкович Е. М. Качественные методы принятия решений. – М.:
Наука Физматлит, 1996. – 208 с.
39. Ларичев О. И. Теория и методы принятия решений, а так же Хроника событий в
Волшебных Странах: Учебник. – М.: Логос, 2000. – 296 с.
40. Подиновский В.В., Ногин В.Д. Парето-оптимальные решения многокритериальных задач. М. Наука. 1982. 256 с.
41. Питмен Э. Основы теории статистических выводов: Пер. с англ. – М.: Мир,
1986. – 104 с.
42. Шестаков К.М., Бобко Ю.К. Лабораторный практикум по курсу “Промышленная электроника” / – Мн.: БГУ, 1999. – 57 с.
43. Шестаков К.М. Лабораторный практикум по специальному курсу “Теория
принятия решений и распознавание образов” / – Мн.: БГУ, 2002. – 61 с.
44. Абламейко С.В., Лагуновский Д.М. Обработка изображений: технология, методы,
применение. Учебное пособие. –Мн.: Амалфея, 2000. – 304 с.
192
СОДЕРЖАНИЕ
1.
1.1.
1.2.
2.
2.1.
2.2.
2.3.
2.4.
2.5.
3
3.1.
3.2.
3.3.
3.4.
3.5.
3.6.
3.7.
3.8.
3.9.
4.
4.1.
4.2.
4.2.1.
4.2.2.
4.2.3.
4.2.4.
4.2.5.
4.2.6.
4.3.
4.3.1.
Введение ...............................................................................
Истоки курса теории принятия решений и распознавания
образов ...................................................................................
Введение в проблематику курса ..........................................
Краткий анализ рекомендуемых литературных источников
Случайные события и процессы ..........................................
Статистические модели в описании объектов, признаков,
образов, классов, ситуаций и процедур ..............................
Оценка параметров и функций в анализе ситуаций ..........
Статистические исследования при формировании описания образов и ситуаций .......................................................
Распознавание в математической статистике ...................
Риск и его описание .............................................................
Распознавание образов ........................................................
Классификация систем распознавания образов ..............
Алфавит признаков, его компоновка и минимизация .....
Распознавание объектов по геометрическим параметрам
Распознавание объектов по цвету ......................................
Распознавание объектов по типу индикатрисы отражения
поверхности ............................................................................
Корреляционные алгоритмы распознавания ......................
Распознавание близко расположенных в пространстве признаков объектов .......................................................................
Распознавание объектов по косвенным признакам ............
Распознавание объектов при сверхразрешении ..................
Теория принятия решений ....................................................
Общие положения теории принятия решений ....................
Классические критерии принятия решений ........................
Минимаксный критерий принятия решения ........................
Критерий Байеса – Лапласа ...................................................
Критерий азартного игрока или предельного оптимизма
Критерий Сэвиджа ..................................................................
Критерий произведений .........................................................
Расширенный минимаксный критерий ................................
Производные критерии принятия решений .........................
Критерий Гурвица ..................................................................
193
3
4
4
8
10
10
23
26
45
51
55
56
60
63
71
83
89
102
125
142
150
152
161
161
163
167
169
171
174
175
175
4.3.2.
4.3.3.
4.3.4.
4.4.
4.5.
4.6.
4.7.
Критерий Ходжа – Лемана ....................................................
Критерий Геймейера ..............................................................
BL(MM) критерий ..................................................................
Гибкий критерий принятия решения ...................................
Адаптивный критерий Кофлера-Менга ...............................
Принятие решений по нескольким критериям ...................
Принятие решений с распознаванием образов .................
Приложение
Примерное распределение материала по лекциям
Литература
194
176
177
177
179
183
184
187
190
191
Учебное издание
Шестаков Константин Михайлович
КУРС ЛЕКЦИЙ
по специальному курсу
«Теория принятия решений и распознавание образов»
Учебное пособие для студентов
факультета радиофизики и электроники
Ответственный за выпуск К. М. Шестаков
Редактор _________________
Корректор ___________________
Подписано в печать11.05.2005. Формат _60×84/16. Бумага офсетная.
Печать офсетная. Усл. печ. л.10,70. Уч. – изд. л. 10,58. Тираж 100 экз. Зак. 486.
Белорусский государственный университет.
Лицензия ЛВ № 315 от 14.07.98.
220050, Минск, пр.Независимости, 4.
Отпечатано в Издательском центре БГУ.
220030, Минск, ул. Красноармейская, 6.
195