Малынкин К. В.Ситуационная адаптация цифровой информации
advertisement

1
УДК 629.7.05
СИТУАЦИОННАЯ АДАПТАЦИЯ ЦИФРОВОЙ ИНФОРМАЦИИ О МЕСТНОСТИ
ДЛЯ БОРТОВЫХ ГЕОИНФОРМАЦИОННЫХ ЗАДАЧ
Заместитель начальника отдела К. В. Малынкин,
ЗАО НПО «Мобильные Информационные Системы».
Введение
Большинство новых целевых задач, решаемых комплексами бортового радиоэлектронного оборудования современных, модернизируемых и перспективных летательных
аппаратов, требуют для успешного решения наличия на борту разнообразных априорных данных, в том числе и пространственных. Некоторые из таких задач полностью
построены на обработке последних, то есть без необходимых исходных пространственных данных они в принципе не решаются. Другие лишь на определённых этапах выполнения требуют геоинформационной поддержки, но могут быть решены и без неё
(но, вероятно, с худшим качеством или более низкой эффективностью). В любом случае такие бортовые приложения называются геоинформационными.
Практика реализации таких задач на борту показывает, что само обеспечение бортовых потребителей пространственными данными является задачей нетривиальной.
Даже при условии применения для создания бортовой аппаратуры самой современной
элементной базы разработчики сталкиваются с целым рядом проблем. Во-первых, с
возрастанием требований к точности решения геоинформационных задач растут и требования к разрешению (уровню детализации) исходных пространственных данных, что,
в свою очередь, приводит к резкому скачку объёмов хранимой и обрабатываемой информации и критической нагрузке на вычислители, каналы передачи и систему отображения. Во-вторых, для бортовых комплексов характерно параллельное выполнение
сразу нескольких ресурсоёмких геоинформационных задач, в связи с чем встаёт вопрос
непрерывного обеспечения в реальном времени пространственными данными одновременно нескольких потребителей. Кроме того, требования к качеству и скорости решения целевых задач всегда опережают темп роста мощностей бортовых вычислительных
средств.
Решение данных проблем требует, помимо модернизации аппаратуры, применения оригинальных архитектурных решений при проектировании бортовых систем баз
данных, в том числе и путём предоставления разнообразных средств ситуационной
адаптации цифровой информации о местности. Таким образом, и в настоящее время задача совершенствования существующих и разработки новых специализированных бортовых систем баз пространственных данных, обладающих такими средствами и способ-
2
ствующих повышению эффективности и обеспечению непрерывности процессов выборки, обработки и выдачи информации бортовым потребителям для решения целевых
задач, не теряет своей актуальности.
Ситуационная адаптация
Одним из подходов к организации бортовых систем баз пространственных данных является поддержка хранения цифровой информации о местности на различных
уровнях разрешения, что позволяет проводить адаптивную выборку и выдачу бортовым
потребителям информации соответствующего уровня детальности в зависимости от текущих условий полёта.
Под ситуационной адаптацией цифровой информации о местности понимается
процесс настройки состава и уровня детальности бортовых пространственных данных
при их выборке из соответствующих баз данных и передаче потребителям в зависимости от сложившихся условий полёта.
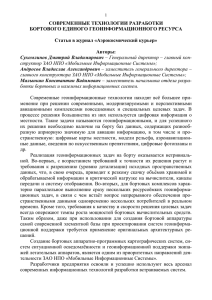
На рисунке 1 показана обобщённая схема этого процесса. На вход модуля (компонента) ситуационной адаптации поступают исходные параметры: текущие скорость,
высота, осуществляемый этап, реализуемый режим, другие параметры полёта, приоритет бортового потребителя, требуемые параметры запрашиваемых данных, а также
оценка доступных вычислительных ресурсов. На выходе – подготовленные для передачи потребителям в соответствии с текущими условиями данные.
Рисунок 1. Обобщённая схема ситуационной адаптации пространственных данных.
3
Современные бортовые картографические системы обладают простейшими средствами ситуационной адаптации, такими как формализованный отбор объектов по ряду
критериев: по принадлежности к определённой категории, определённому слою пространственной информации; по характеру влияния объектов на полёт и т. д. [1].
Для настройки пространственного разрешения предлагается использовать подход,
основанный на представлении исходной цифровой информации о местности в виде совокупности последовательных приближений, а именно – в виде грубой составляющей
на самом низком уровне детализации и набора уточняющих коэффициентов для более
высоких уровней [2]. Такое представление исходных пространственных данных может
быть получено посредством разложения его по базису специальных математических
функций [3]. В предлагаемом подходе исходная информация (одномерный дискретный
сигнал – в случае векторных данных, двумерный – в случае растровых данных) раскладывается по вейвлет-базису. Коэффициенты разложения получаются посредством дискретного вейвлетного преобразования, выполненного для набора координат векторного
объекта либо для значений в узлах растра. Грубая составляющая, полученная таким образом на некотором минимальном уровне детализации, и уточняющие коэффициенты,
полученные для более высоких уровней детализации, записываются в бортовую базу
пространственных данных.
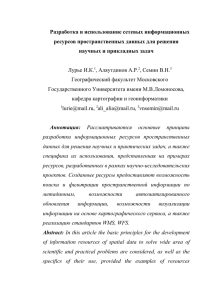
Рисунок 2. Прямое и обратное дискретное вейвлетное преобразование.
4
Разложение сигнала на грубую составляющую и уточняющие коэффициенты с
помощью дискретного вейвлетного преобразования схематично представлено на рисунке 2 (сверху) как дерево низкочастотных и высокочастотных фильтров. Низкочастотные фильтры, обозначенные оператором {Ln}, уменьшают количество информации
исходного сигнала. Высокочастотные фильтры {Hn} предоставляют недостающую информацию [4]. Размерность результата преобразования низкочастотным и высокочастотным
фильтрами
вдвое
меньше
размерности
входного
сигнала,
то
есть
Ln, Hn: Rn → Rn/2. На рисунке 2 (сверху) показан пример вейвлетного преобразования
сигнала X из пространства R8. Вейвлетное преобразование этого сигнала есть элемент
пространства R8 вида {L2L4L8X, H2H4L8X, H4L8X, H8X}, где L2L4L8X – грубое приближение сигнала на минимальном уровне разрешения, а остальные члены – векторы деталей, сохраняемых на каждом шаге преобразования. Процесс восстановления исходного
сигнала (обратного дискретного вейвлетного преобразования) схематично показан на
рисунке 2 (снизу).
При запросе записанной таким способом информации о местности передаётся
сначала грубая составляющая на минимальном уровне детализации, а затем – необходимое данному потребителю количество уточняющих коэффициентов. По полученным
грубой составляющей и уточняющим коэффициентам выполняется восстановление
сигнала посредством обратного дискретного вейвлетного преобразования до требуемого уровня разрешения. Для целевых задач с высоким приоритетом и жёсткими требованиями к исходным пространственным данным будет необходимо выполнять восстановление до максимального уровня разрешения. Для задач менее требовательных можно
выполнять восстановление данных до уровня разрешения ниже максимального (или
восстановление только части данных до максимального уровня).
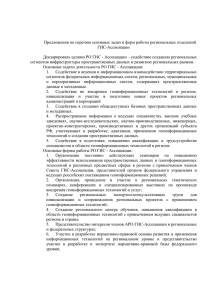
Например, на рисунке 3 показан один из возможных режимов формирования
плоского изображения рельефа методом светотеневой пластики.
5
Рисунок 3. Адаптация пространственного разрешения рельефа земной поверхности
при формировании картографического изображения на индикаторе.
При этом на всю область экрана индикатора отображаются данные по рельефу
земной поверхности в районе полёта низкого разрешения, а на небольшой фрагмент
этого района в непосредственной близости от летательного аппарата отображается рельеф, восстановленный до максимального разрешения. Для хранения значений превышений на участок с низким разрешением требуется приблизительно в 16 раз меньше
памяти, чем на участок с высоким разрешением. Кроме того, такой режим позволяет
экипажу сосредоточить внимание на более чёткой зоне высокого разрешения, а по всей
остальной территории иметь только тенденцию пространственного распределения превышений рельефа.
Заключение
Применение описанного подхода к организации баз пространственных данных
может обеспечить следующие преимущества.
–
Обеспечение непрерывности решения геоинформационных задач за счёт снижения при определённых условиях детальности исходных данных для некоторых из
них.
6
–
Снижение нагрузки на бортовую систему управления базой пространственных
данных, бортовую сеть и систему визуализации при снижении уровня детальности запрашиваемых данных.
Изложенный в статье подход требует дальнейшего исследования и тщательного
моделирования, при котором нужно решить следующие вопросы.
–
Определить режимы адаптации пространственных данных и их связь с этапами,
условиями полёта, геоинформационными задачами, приоритетами потребителей и
т. д.
–
Оценить потребные ресурсы при осуществлении доступа к базе данных, построенной по описанному принципу, и возможности аппаратной реализации некоторых этапов.