Активная система "Советчик оператора"
advertisement

АКТИВНАЯ СИСТЕМА
«СОВЕТЧИК
ОПЕРАТОРА» ПРИ
УПРАВЛЕНИИ
МЕТАЛЛУРГИЧЕСКИМИ
ОБЪЕКТАМИ
Бурков В.Н.
Еналеев А.К.
Киселева Т.В.
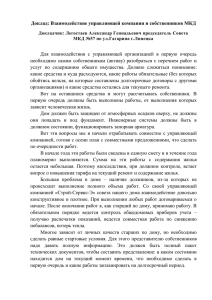
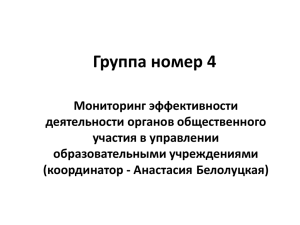
СХЕМА ПАССИВНОГО СОВЕТЧИКА
WD,
UD, (VD), YD – совокупность внешних, управляющих (входных) и выходных
воздействий, действительно имеющих место на объекте;
Zϵ(W, U, Y) - те же самые величины, прошедшие через измерительную систему;
NY, NV – измерительные погрешности;
UM – машинные (модельные, компьютерные) управляющие воздействия, которые
вырабатываются с помощью УВМ (или компьютера) и подаются в натурнодействующую управляющую систему в качестве «советов»;
UH –управляющие воздействия, вырабатываемые человеком-технологом в составе
натурнодействующей управляющей системы.
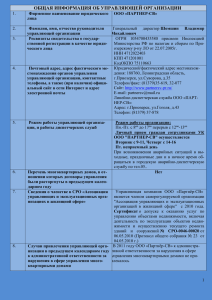
СХЕМА АКТИВНОГО СОВЕТЧИКА
Y
U
M
(i ) Y (i ) k [U
HM
(i )
Н
M
(i )U
(i ) U
H
H
(i )
М
H
(i )
M
(i )]
(i )U
(i )
М
(i )
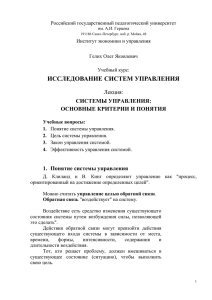
РЕЖИМЫ ВЗАИМОДЕЙСТВИЯ НАТУРНОДЕЙСТВУЮЩЕЙ И
МОДЕЛЬНОДЕЙСТВУЮЩЕЙ УПРАВЛЯЮЩИХ СИСТЕМ
Соревновательный
Q H (i )
H
St
Q M (i )
Q M (i )
M
St
Q H (i )
Взаимодействия (взаимосодействия)
St H (i ) K H (i ) d [1 K H (i ) K M (i ) ]
St M (i ) K M (i ) d [1 K H (i ) K M (i ) ]
StH, StM - стимулирующие функции натурного
и модельного каналов соответственно
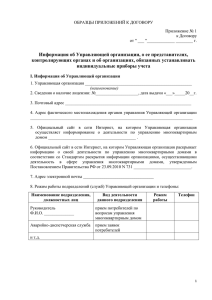
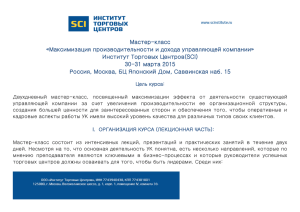
ДВУХКАНАЛЬНАЯ
СИСТЕМА С УПРАВЛЯЮЩЕЙ
НОРМАТИВНОЙ МОДЕЛЬЮ
ФУНКЦИОНИРОВАНИЕ БЛОКОВ СРАВНИТЕЛЬНОГО
ОЦЕНИВАНИЯ ЭФФЕКТИВНОСТИ РЕШЕНИЙ, ОБУЧЕНИЯ И
СТИМУЛИРОВАНИЯ ЧЕЛОВЕКА, А ТАКЖЕ ВЫРАБОТКИ
НАТУРНО-МОДЕЛЬНЫХ РЕШЕНИЙ
X
HM
^ H
FX [ X , X M , Z , Q H , Q M , t ], Z {W , U , Y }, X {I , U };
St FSt [Q H , Q M , Q HM , t ], t [ At , B t ];
Q H FQ [ Z , Z H , I , I H , t ], Z H {U H , Y H };
Q M FQ [ Z , Z M , I , I M , t ], Z M {U M , Y M };
Q HM FQ [ Z , Z HM , I , I HM , t ], Z HM {U HM , Y HM };
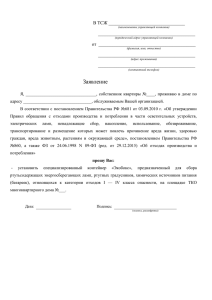
БЛОК-СХЕМА РАБОТЫ ВОССТАНОВИТЕЛЬНОПРОГНОЗИРУЮЩЕГО АЛГОРИТМА
ФОРМУЛЫ, ПОЯСНЯЮЩИЕ РАБОТУ ВПА
Ретроспективное восстановление условно-образцового
решения
U (i ) U (i ) k[Y (i ) Y (i )]
B
*
Приведение восстановленных условно-образцовых решений к
базовому режиму работы объекта
U (i) U (i) d [W (i) W ]
Б
J
B
j 1
Б
j
j
j
Сглаживание и прогнозирования базовых управлений на
будущие циклы процесса
~
~
~
U (i ) U (i 1) [U (i ) U (i 1)];
Б
Б
Б
Uˆ (i 1) U (i )
Б
Б
Пересчет спрогнозированных базовых управлений на
контролируемые условия предстоящего процесса (цикла
процесса).
Uˆ (i 1) Uˆ (i 1) d [Wˆ (i 1) W ]
Б
J
j 1
Б
j
j
j
СТРУКТУРА ДВУХУРОВНЕВОЙ ПРИОБЪЕКТНО-ПЕРЕСЧЕТНОЙ МОДЕЛИ
Y k V , Y
J
M
i
j 1
M
ij
j
i
HM
Y Y ,
H
M
i
i
k k [1 exp( b Y Y )]
ij
*
*
*
ij
ij
ij
H
X
M
X
ОБОБЩЕННЫЕ ПОКАЗАТЕЛИ ЭФФЕКТИВНОСТИ
K (i ) K (i ) d (1 K (i ) K (i ) ),
H
H
H
H
M
K (i ) K (i ) d (1 K (i ) K (i ) )
M
M
M
H
M
KH(i), KM(i) – нормированные значения
показателей эффективности для i-ого цикла
вырабатываемых решений в
натурнозамкнутом и модельнозамкнутом
каналах принятия решений;
dH, dM – настроечные коэффициенты