Бисмиллахир-Рахманир-Рахим
advertisement

МНОГОЛИСТОВЫЙ ФАЗОВЫЙ СТЕРЕО ПОРТРЕТ ТРЕХМЕРНОЙ
ДИНАМИЧЕСКОЙ СИСТЕМЫ И ВИЗУАЛИЗАЦИЯ ПРОЦЕССА
УПРАВЛЕНИЯ ДВИЖЕНИЕМ
А.Г.Нагиев1, Ф.Б.Имранов2, Г.А.Нагиев3
1
Сумгаитский гос. университет, Сумгаит, Азербайджан, nashfn@hotbox,ru
2
Институт математики и механики, НАНА, Баку, Азербайджан, fariz65@inbox.ru
3
Институт математики и механики, НАНА, Баку, Азербайджан, hasan7770909@rambler.ru
Современные достижения в области нелинейной динамики, основывающиеся на
методе вычислительного эксперимента, и современные компьютерные технологии создания
анимационных эффектов, делают эффективной предикативно-корректорную стратегию
управления сложными физическими объектами в реальном времени. На пути эффективного
внедрения этой стратегии в практику кроме проблемы построения 3D фазовых портретов
динамических систем имеется целый ряд нерешенных вопросов, в числе которых проблема
создания визуальных представлений обо всех особенностях трехмерных многообразий – семейств траекторий управляемых объектов на «двухмерном» табло визуального наблюдения.
Создание эффектов анимации, например, осуществление целенаправленных поворотов
изображения по специально заданному временному циклу, поочередные переключения 2D
проекций изображений, и т.п. могут служить кардинальному продвижению в решении данной проблемы.
Разработка стратегии управления с использованием фазовых портретов усложнена
также и тем, что существует количественное и качественное влияние вектора управления на
них. Так рождается проблема размерности, которая при всех высоких показателях производительности современных компьютеров требует специальных алгоритмов для своего решения.
Пусть задана динамическая система
dx
f x , u ;
dt
x x1 , x 2 , x3 ; u u1 , u 2 ;
f f1 , f 2 , f 3 ; t 0 ,
(1)
нелинейная, имеющая в рассматривающейся ограниченной области G фазовых состояний
три точки равновесия x *j {x *j1 , x *j 2 , x *j 3 }; j 1,3 , определяемые условиями
f i ( x *j , u) 0; i 1,3 . Среди точек равновесия две точки x *1 , x 2* являются устойчивыми.
Предполагаем, что управления u k (t ); k 1,2 , кусочно-постоянные функции, ограниченные
интервалами u k min u k u k max , имеют влияния не только на координаты точек равновесия,
но и могут качественно менять структуру семейств фазовых траекторий, вплоть до слияния
двух равновесных положений в одно, рождая бифуркации решений динамической системы.
Считается, что область G может быть разделена только на две сепарабельные подобласти
G1 и G2 , включающие соответственно x1* , x 2* как центры притяжения траекторий, все
время остающихся в них, пока неизменно управление, т.е. u kn (t ) const; k 1,2 . При этом
же условии неустойчивое положение равновесия x 3* остается предельной точкой для обоих
подмножеств.
Введем следующие определения, необходимые для формулировки задачи управления.
Определение 1 . Фазовым стерео портретом динамической системы будем называть плоское отображение на панель наблюдения (монитор) семейства трехмерных фазовых
траекторий, построенного в дополнительной системе координат с началом, которое расположено в точке равновесия системы (1), и которое совершает поворот вокруг одной из своих осей по одному из нижеследующих законов:
(t ) 0 t max sin
t
;
T
t
T
(t ) 0 t max dim ,
(2)
2
где 0 , max постоянное и гармоническое составляющие угловых скоростей вращения координатных осей, а обозначение dim выражает функцию выделения дробной части частного.
Определение 2. Стерео изображением области удерживающихся состояний (ОУС)
будем называть одну из замкнутых поверхностей S1 , или S 2 , выделяющую соответственно области G1 или G2 –векторные поля с изображением текущего состояния x (t ) (красная
точка), которая представлена также во вращающейся по одному из законов (2) системе координат.
Определение 3. Многолистовым фазовым стерео портретом , (многолистовым
стерео изображением ОУС) будем называть множества фазовых стерео портретов (множества стереоизображений ОУС), каждый элемент которого соответствует одному вектору
управления u U .
Многолистовость фазового портрета, т.е. взаимно однозначное соответствие каждого фазового портрета некоторому вектору управления из U , справедливо только в пределах определенного топологического качества области решений системы (1). Поэтому, необходимо потребовать отделимость, генерального множества U на выпуклые подмножества
U U ; 1,2,..., разных топологических качеств, т.е. на подмножества, в пределах
которых система характеризуется качественно одного типа фазовыми портретами.
Пусть заданы прямоугольники:
u kmin u k u kmax ; k 1,2; 1, ,
(3)
в котором определены неравенства b (u) b 1 ; 1, , выделяющие числа выпуклые области вектора управления , при которых система (1) рождает различные топологические качества пространства решений:
Назовем характер движения системы квазисвободным, если движущими силами
являются начальное отклонение x (t 0 ) изображающей точки от центра притяжения x *1 , и
случайные флуктуации от внешних импульсов, времена, действия которых пренебрежительно малы по сравнению с характерным временем системы (1), а средний период повторения
составляет немалую величину. Выполнение этих условий обеспечивает пренебрежительно
малую зависимость фазовых портретов от воздействий внешних импульсов. Дрейф изображающей точки от центра притяжения (начала вращаемой системы координат) может привести к близости к поверхности S1 , квалифицируемый как вхождение в зону опасной
границы потери удерживающей области G1 .
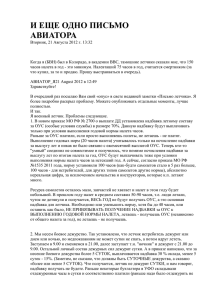
На рис.1 представлены топологические качества решений системы, представленной ниже:
dx1
0.6x3 x1 2.1w;
dt
dx2
c1 c2 ;
dt
c1 0.11w 0.16u1 ;
c2 0.23 u2 u1 x2 0.37
dx3
1 x2
10u1 x1 x3 100u12 th2.4 x2 2.4 2; w x1 exp 0.3
;
dt
x2
(4)
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
3
0
3
2
2
1
0
0.2
0
0.4
0.6
1
0.8
1.2
1
1.4
0
0.2
0
0.4
0.6
0.8
1.2
1
1.4
а)
b)
2.2
2.5
2
1.8
2
1.6
1.5
1.4
1.2
1
1
0.5
0.8
0
2
0.6
0.4
1.5
0.2
2
1
1.5
0.5
1
0
1
0.5
0
0
c)
0
0.5
1
1.5
2
d)
Рис.1 Фазовые портреты с различными топологическими качествами:
А) со стационарной точкой типа неустойчивый «фокус»; б) с стационарной точкой
типа устойчивый «фокус»; с) Потеря одной стационарной точки; д) Фазовый портрет с тремя стационарными состояниями.
Замкнутые поверхности, выделяющие ОУС, удобно аппроксимировать в сферической системе координат.
Вводится сферическая система координат с началом, совпадающим с одним из
устойчивых стационарных состояний:
x1 x *j1 sin cos ;
x 2 x *j 2 sin sin ;
x3 x *j 3 cos ;
(5)
j 1, or 2
где x *ji ; i 1,3 декартовые координаты одного из двух устойчивых точек равновесия;
, , сферические координаты произвольных точек пространства относительно выбранной точки равновесия; x1 , x2 , x3 декартовые координаты в соответствие с системой (1).
Фиксируя в (4) переменные , , т.е. строя сетку по узловым значениям
2
2
0, h1 ,..., m h1 ,...,2 , h1
; 0, h2 ,..., n h2 ,...,2 , h2
, аппроксимацию
M
N
4
множеств всевозможных траекторий или всевозможных разделяющих поверхностей в областях, согласующихся с (3), можно осуществить по оставшимся двум другим переменным,
x *ji , . Учитывая, что последние являются функциями управления, можно написать:
x1 (u, m,n) x *j1 (u) (u, m,n);
x 2 (u, m,n) x *j 2 (u) (u, m,n);
(6)
x3 (u, m,n) x *j 3 (u) (u, m,n);
j 1, or 2; m 1, M ; n 1, N .
*
ji
Функции x (u) легко получить по уравнениям стационарных решений, которые
представляют собой суть бифуркационные двухпараметрические диаграммы. Дискретное
представление области допустимых управлений
u
ui min
(7)
ui ui min k i i ; i i max
; k i 0,1,..., K i 1; i 1,2;
Ki
создает K K1 K 2 числа фиксированные векторы u k ; k 1, K , т.е. K число листов в
многолистовом фазовом стерео портрете системы.
Определение (u, m,n) следует осуществить по результатам вычислительного
эксперимента на модели (1)-(5) по построению разделяющих поверхностей. Причем, согласно K числу листов, аппроксимирующих область u U , должны быть определены векторы
ρk ; k 1, K ; dim ρk n m .
Дискретизация числового множества ( , ) R 2 в виде равномерной сетки с
n m числа узловыми точками, т.е. создание шаблона векторов фиксированных направлений, нуждается в разработке алгоритмов их генерации.
Алгоритм генерации множества векторов, секущих поверхность сферы в заданном
W числе равноотстоящих точках, формулируется в следующем виде:
m 1, L;
(m, n)
( m)
L
2
n
; n 1, floor L sin m ;
m
L
L sin
L
(8)
m;
где (m, n), (m) соответственно дискретные широтно-долготные координаты; m, n
номера шагов приращений угловых координат; L целое число, определяющая «тонкость»
сетки, т.е. – величину W ; floor (.) функция, возвращающая меньшее ближайшее целое
число. В частности, имеют места соответствия: – при L 20, W 120; L 30, W 268;
L 40, W 486; L 50, W 766, и т.п.
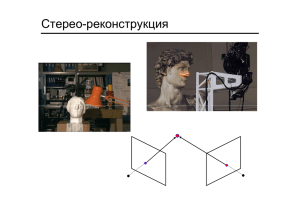
На рис.2 приведено сеточное покрытие (шаблон) на поверхности шара при
L 50, W 766.
5
0.5
0
-0.5
0.8
0.6
0.5
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
0
-0.5
В программных продукциях по визуализации вычислений и компьютерной графики ведущих фирм используются эффективные алгоритмы построения покрытий объектов
негеометрических форм, в основе которых лежит метод триангуляции Делоне [&] . В данном случае аппроксимация, использующая шаблона, значительно упрощает также и задачу
триангуляции. Несложно строить равномерно распределенную треугольную сетку с заданным количеством узлов на поверхности сферы единичного радиуса, т.е. определить соответствующие широтно-долготные координаты (m), (m, n) в узлах с номерами m, n . Далее учитывая измеренную длину полярного радиуса, легко пересчитываются xi , i 1,3 координаты изображения.
Таким образом, данная стратегия «запоминания» 3D фазовых портретов и/или поверхностей разделения ОУС отличается высокой экономичностью и скоростью воспроизведения. В процессе управления в реальном времени происходит только выбор и раскрытие
листа в многолистовом ФП, который соответствует вектору u . Это соответствие может
быть задано не только в виде таблицы, а также может определяться функциональной зависимостью:
ji ( x ji , u) 0; j 1,3; i 1,3;
k ( k , u) 0; k 1, K ,
(9)
аппроксимирующей табличные данные. .Отметим, в этом случае ФП для динамической системы (1) точнее называть не многолистовым, а бесконечно листовым фазовым портретом.