Коллоквиум. Динамика 1.
advertisement

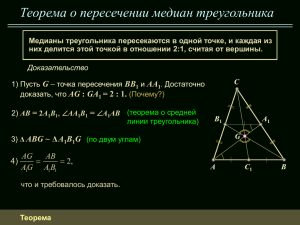
1 2 Тема Постановка задачи Центр масс механической системы Определить модуль главного вектора внешних сил, действующих на тело. Количество движения механической системы Определить модуль и направление количества движения тела Схема 10 tс 1 ос 0,5см m 2кг о с Кинетический момент механической системы Кинетическая энергия механической системы с о F F 2 F 2 n A 10с 1 OA 0,4 м m 2кг Q Vc C о Определить модуль кинетического момента тела о z 4 Fn m an m 2 OC a an о 3 F m a m OC 10с 1 R 0,4 м m 2кг Vc OC Q mVc Lв ращ J zo J zo mr 2 2 mr 2 32 mr 2 VB VB 10 м / с Определить кинетическую энергию тела VС Р мцс R 0,4 м r 0,2 м 0,3 м m 2кг T пп mVс 2 2 VB Rr J с 2 2 ; VC r ; J m 2 Пример1 Тело массы m = 2кг движется согласно закону S = 2t2 + 1(M). Определить модуль главного вектора внешних сил, действующих на тело. s N Решение: Теорема о движении центра масс системы. о G max Fx e ax s 4 4m F 8н Пример 2 Диск массы m = 8кг приводит в движение тело А, движущееся со скоростью V = 8t M/c. Определить модуль главного вектора внешних сил, действующих на диск. V с V А Vс x Vc V2 4t acx Vc 4 Решение: Теорема о движении центра масс системы. macx Fx e m4 Fx 32н e Пример 3 К телу 1 приложена сила F= 20н, m1 = 8кг,. Определить ускорение тела 1 в момент времени t = 0,5c, если относительно его движется тело 2 массой m2 = 2кг по закону S = cosπt (м). s F N2 2 1 N1 из определения центра масс x (m1 m2 ) xc m1 x1 m2 x2 G2 G1 Теорема : (m1 m2 )acx F x2 x1 s дифференцитуем дважды (m1 m2 ) xc m1x1 m2 x2 (m1 m2 )ac m1a1 m2 (a1 2 cos t ) m1a1 m2 (a1 cos t ) F 2 a1 ( F 2 m2 cost ) m1 m2 20 10 2м / с2 Пример 4. Угловая скорость кривошипа ОА равна ωОА=2с-1. ОА = 0,8м. Определить количество движения шатуна АВ, если его масса m = 2кг. B VB O 600 Q0 Vс Решение. Q m Vс C 90 Определим VC. VA OA OA 1,6 м / с A VA CP ( AP) ( AC ) 2 AC AB 2 OBsin 600 2 VС AB CP ? м / с 2 0,7 VС AB CP 0,67 2,5 1,7 м / с AP OP OA 2 OB OA 4OA OA 2,4 CP (2,4) 2 (0,7) 2 2,5 AB VAP 12,,64 0,67 A ωAB Q m Vc 2 1,7 3,4кг м / с Р- МЦС Vx Пример 5 Самолет летит горизонтально со скоростью V=600км/ч. Из самолета прыгает парашютист и через 15 с опускается на землю, испытывая силу сопротивления R=mV. Определить скорость приземления парашютиста. Решение: Начальные условия V t для парашютиста : dV при t0 0; Vx 600км / ч R mdV dt dV dt mg R g V разделим dV g V dt dt t0 (ln( g V ) ln g ) t ln g V g e t (mg mV ) mg переменные y V0 V y V0 0 dQy dt g V t g V g V ge t g V g (1 e t ) V g (1 e 15 ) 9,8(1 e115 ) 9,8 м / с Пример 6. Барабан, момент инерции которого J, вращается вокруг оси z, проходящей через точку О. К барабану приложен момент сопротивления Mc. Радиус барабана R. Масса груза равна m. Определить -угловое ускорение барабана . Решение: Теорема об изменении к.м. Mc yo o xo dLoz M ez dt V R Loz J mV R Z G2 G1 M e z G1 R M c Loz ( J mR ) 2 V J mR mgR M 2 с mg R M с J mR 2 Пример 7 Однородная прямоугольная плита массой m укреплена c помощью петли и удерживается в горизонтальном положении тросом АВ. Определить угловую скорость плиты через 2 секунды после обрыва нити. Ширина плиты b=1м. x A mb 3 d dt 2 J z M z M e z G b2 B G d mgb 2 dt 3g 2b 14,7 d e Jz Mz dt e z b y Решение: Дифференциальное уравнение движения mgb 2 Jz mb 2 3 d 14,7 dt интегрируем t 0 0 d 14,7dt 14,7t 29,4c 1 r VB B С P-мцс Vc VB 2 2м / с Пример 8 Дано Масса однородного диска m=4кг . Скорость точки B диска VB=4м/с. Диск катится без скольжения. Определить кинетическую энергию VC диска. 1 1 2 2 T = mVc + I cω 2 2 Vc ω= r 1 2 I C = mr 2 2 V 1 1 1 2 2 2 C 3 кгм 2 T mVc mr 2 4 mVc 12 с 2 2 2 2 r Пример 9. Ролик 1вращается под действием момента М=10нм. Масса ролика m1=4кг. Радиус R1=0,4м. Каток 2 катиться по неподвижной поверхности без проскальзывания. R2=2r2=0,6м. Радиус инерции катка ρ= 0,4м. Масса катка m2=8кг. Система начала двигаться из состояния покоя. Определить угловую скорость ω1 ролика после 5 его оборотов. Теорема об изменении кинетической энергии VB2= VB1 в интегральной форме для неизменяемой B2 B1 M 2 ω1 системы при T0=0 c Vc е TA 1 p J1 m1R12 2 VB2 VB1 1R1 2 T 0,32; J 2 m2 1,28. 2 VB 2 B2 P 1 2 m2Vc 2 2 Vc 2CP 2 R2 1R1 R2 r2 R2 J2 2 2 2 Выразим все кинематические характеристики через ω1, которую надо найти. 1R1 r2 R2 r2 R2 VB2 J1 2 T T в р1 T пп 2 (*) 2 0,441 VC 0,271 T T1 T2 0,57 2 1 Кинетическая энергия системы: Найдем работу внешних сил A( e) AM AG1 AG2 FN AFтр N AG1 AG2 FN AFтр 0 M 2 c Vc Fтр G2 1 G1 A( e) AM M 10 2 5 314 Нм Подставляем все в (*) 0,57ω21=314; ω1=24,47с-1