Parallel methods for solving the optimization problems of large
advertisement

ПАРАЛЛЕЛЬНЫЕ МЕТОДЫ
РЕШЕНИЯ ЭКСТРЕМАЛЬНЫХ
ЗАДАЧ
Ю.Г. Евтушенко, А.И. Голиков
Вычислительный центр им. А.А. Дородницына РАН
М.А. Посыпкин
Центр Грид-технологий и распределенных вычислений
Института системного анализа РАН
Москва, ИВМ-2010
Прямая задача ЛП:
(P)
f* min c x, X { x R : Ax b, x 0n }
n
xX
Двойственная задача ЛП:
(D)
f* max b u, U {u R : A u c }
m
uU
X { x R : Ax b, c x f* , x 0n }
*
n
Задача нахождения проекции точки x на множество
решений X * прямой задачи ЛП имеет вид:
min* 21 || x x ||2,
(1)
xX
X * { x R n : Ax b, c x f* , x 0n }
Функция Лагранжа:
L( x, p, ) 21 || x x ||2 p (b Ax ) (c x f* )
Двойственная к (1):
max
minn L( x, p, )
m
1
pR , R xR
Решение внутренней задачи
минимизации x ( x + A p
c )
2
2
1
1
max
{
b
p
||
(
x
A
p
c
)
||
f
||
x
||
}
*
2
2
m
1
pR , R
Теорема 1. Пусть множество решений X* прямой
задачи (P) непусто. Тогда существует такое β*, что
при любом β ≥ β* проекция точки
наxмножество
X* задается формулой
x ( x + A p( ) c ) ,
*
где p(β) является решением задачи безусловной
минимизации
minm [ b p || ( x A p c ) || ]
pR
1
2
2
Теорема 2. Пусть множество решений X*
прямой задачи (P) непусто. Тогда для любых
x X * и β > 0 решение задачи (D) дается
формулой u
*
p( )
,
где
p(β)
является
решением задачи безусловной минимизации
minm [ b p || ( x A p c ) || ].
pR
1
2
2
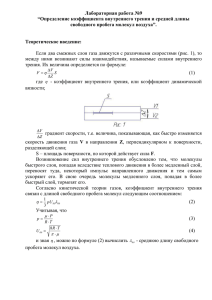
P-IV, 2,6 GHz, 1Gb
Вычислительный эксперимент
||(ATu-c)+||
|cTx-bTu|
m×n×d
T (Sec.)
Iterat.
||Ax-b||
100 × 106 × 0.01
29.3
17
1.7 × 10-11
2.0 × 10-13 9.7 × 10-11
300 × 106 × 0.01
42.0
13
1.0 × 10-10
7.0 × 10-13 2.6 × 10-10
600 × 106 × 0.01
68.4
12
3.1 × 10-10
1.5 × 10-12 2.8 × 10-10
1000 × 106 × 0.01
95.8
10
9.4 × 10-10
3.5 × 10-12 6.9 × 10-10
500 × 104 × 1
29.3
8
2.9 × 10-8
3.4 × 10-11
1000 × 104 × 1
117.2
7
1.3 × 10-7
1.0 × 10-10 2.9 × 10-7
3000 × 104 × 0.01
81.5
7
2.0 × 10-9
9.1 × 10-12 3.7 × 10-9
4000 × 104 × 0.01
196.2
8
2.9 × 10-9
1.2 × 10-11
1000×(3·106) × 0.01
309.1
11
1.2 × 10-9
4.1 × 10-12 4.9 × 10-9
1000 ×(5·106) × 0.01
412.8
8
7.3 × 10-9
7.4 × 10-12 7.3 × 10-8
1000 ×(5·107) × 0.01
4392.5
6
7.6 × 10-9
2.1 × 10-12 1.1 × 10-7
1.1 × 10-8
2.6 × 10-8
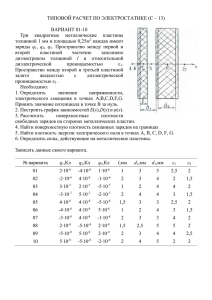
Компьютер: Celeron
№
Размер
Задачи
m×n×d
Duality Gap
55.0
1.5 × 10-8
1.8 × 10-12
1.2 × 10-7
2
BPMPD (Interior point)
37.4
2.3 × 10-10
1.8 × 10-11
1.1 × 10-10
1
MOSEK (Interior point)
87.2
9.7× 10-8
3.8× 10-9
1.6× 10-6
5
CPLEX (Interior point)
80.3
1.8 × 10-8
1.1 × 10-7
0.0
4
61.8
8.6 × 10-4
1.9 × 10-10
7.2 × 10-3
3
155.4
6.1 × 10-10
3.4 × 10-13
3.6 × 10-8
3
BPMPD (Interior point)
223.5
4.6 × 10-9
2.9 × 10-10
3.9 × 10-9
4
MOSEK (Interior point)
42.6
3.1 × 10-8
1.2 × 10-8
3.7 × 10-8
1
CPLEX (Interior point)
69.9
1.1 × 10-6
1.3 × 10-7
0.0
2
1764.9
3.0 × 10-3
8.1 × 10-9
9.3 × 10-2
5
536.8
6.9 × 10-8
1.4 × 10-13
8.4 × 10-7
2
EGM
3000 × 10000 ×
0.01
CPLEX
EGM
3
1000
×(3·106)
×
0.01
Точности
Dual Infeas.
CPLEX
2
Win XP
Primal Infeas.
Метод
500 × 10000 × 1
1.0 GB ,
Врем
я
(сек.)
EGM
1
2.02 GHz ,
(MATLAB)
(Simplex)
(MATLAB)
(Simplex)
(MATLAB)
BPMPD (Interior point)
-
Не решил
-
MOSEK (Interior point)
-
Не решил
-
CPLEX (Interior point)
340.6
2.4 × 10-2
1.3 × 10-6
0.0
1
370.4
1.8 × 10+2
3.7 × 10+2
1.2 × 10-9
-
CPLEX
(Simplex)
4
1000 ×(5·106) ×
0.01
EGM
(MATLAB)
1007.5
3.9 × 10-8
1.4 × 10-13
6.1 × 10-7
1
5
1000 × 105 × 1
EGM
(MATLAB)
2660.8
2.1 × 10-7
1.4 × 10-12
7.1 × 10-7
1
minm S( p) minm { b p 21 || ( x k A p c ) ||2 }
pR
pR
S(p) выпуклая один раз дифференцируемая кусочно
квадратичная функция
Градиент:
Sp ( p) b A( x A p c )
k
Обобщенная матрица Гессе:
S( p) AD ( x A p c )A
2
#
k
D#(t) есть n×n диагональная матрица с i-м элементом
1, если t 0
ti [0,1], если t 0
0, если t 0
МЕТОД НЬЮТОНА
1)
ps1 ps s (2S( ps ) Im )1Sp ( ps )
С регулировкой шага
s max{1, 21 , 41 ,...} :
Armijo
s s s
s
s
s
S( p ) S( p sd ) Sp ( p )d ,
4
где ds квазиньютоновское направление:
d s ( 2S( ps ) Im )1Sp ( ps ).
2) Стоп, если ||ps+1 – ps|| < tol, иначе положить s =s+1и
перейти к 1)
Клеточная схема разбиения данных
Ax b
10-8 , (A u c )
10-11, |c x - bu| 10-8
Вычислительный комплекс МВС-6000IM
Максимальное ускорение 50 на 144 процессорах,
клеточная схема, m=10 000, n=1 000 000, t=28 сек.
Максимальное число переменных n=60 000 000,
m=5000, t=232 сек., столбцовая схема на 120
процессорах
Максимальное число ограничений m=200 000,
n=2 000 000, t=40 мин., на 80 процессорах.
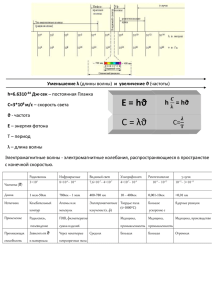
ГЛОБАЛЬНАЯ МИНИМИЗАЦИЯ
ФУНКЦИИ
f* f ( x* ) glob min f ( x)
xX
X* x X : f ( x) f*
X x X : f ( x) f*
*
- множество решений
- множество
- решений
X * X *
12
ЛЕБЕГОВСКОЕ МНОЖЕСТВО
S(f (), X , ) x X : f ( x )
f (x)
f (a )
a
S ( f (), X , )
x
X
Условия глобальной оптимальности
1. Критерий глобальной оптимальности
~
x X * S ( f (), X , f (~
x )) X , ~
xX
2. Критерий глобальной
-оптимальности
~
x X * S ( f (), X , f ( ~
x) ) X , ~
xX
3. Для любого набора множеств X i , X i X ,
k
X
i
X
i 1
k
справедливо ~
x X * S ( f (), X i , f ( ~
x) ) X , ~
xX
i 1
14
Применение минорант
Если (x )
- миноранта для f (x ) ,
т.е. f ( x) ( x), x X , то
S ( (), X , f (~
x )) X , ~
xX ~
x X*
S ( (), X , f ( ~
x) ) X , ~
xX ~
x X *
k
~
~
~
S
(
(
),
X
,
f
(
x
)
)
X
,
x
X
x
X
i
*
i 1
15
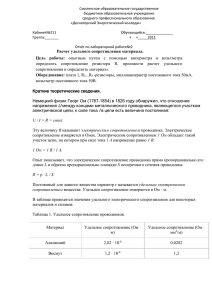
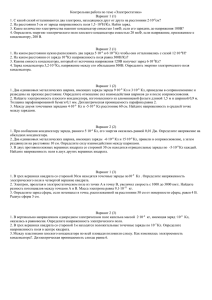
ОСНОВНАЯ ТЕОРЕМА
X1,..., X k , X i R n
- совокупность множеств
Si S ( i (), X , f ( xr ) )
xr X
f ( x) i ( x), x X i
Теорема 1. Если выполнено
то
X
рекордная
точка
k
Si ,
i 1
S4
S1
f ( xr ) f* f ( xr ) ,
Поэтому
xr X *
X
S3
S2
S5
S6
16
МИНОРАНТА 1
f ( x) f ( y) l x y , x, y X i
Условие Липшица:
Миноранта:
f ( x) i1 ( x) f ( xi ) l x xi
Можно исключить из рассмотрения шар радиуса
i ( f ( xi ) f ( xr ) ) / l / l
с центром в точке
xi .
xi
i
17
МИНОРАНТА 2
Градиент удовлетворяет условию
Липшица
Миноранта
f x ( x) f x ( y ) L x y
f ( x) i2 ( x) f ( xi ) f x ( xi ), x xi
L
x xi
2
2
Шар радиуса
i
2
1
2
2
f
(
x
)
f
(
x
)
f
(
x
)
i
x
i
r
L
2L
L
с центром в точке
ci xi f x ( xi ) L
может быть исключен из дальнейшего рассмотрения.
18
МИНОРАНТА 3
Гессиан удовлетворяет условию Липшица
f xx ( x) f xx ( y) M x y , x, y X i
1
M
T
( x) f ( xi ) f x ( xi ), x xi ( x xi ) f xx ( xi )( x xi )
x xi
2
6
3
i
min
M
2
3
~
i ( x) f ( xi ) f x ( xi ), x xi
x xi
x xi
2
6
3
19
3
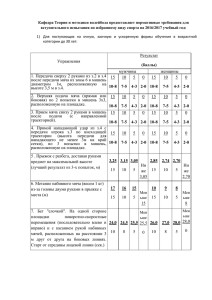
СРАВНЕНИЕ МИНОРАНТ
f ( x) ( x 1)( x 2)( x 4)2
2 ( x)
1 ( x)
3 ( x)
НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
X x R n : ( x ) 0, ( x ) max(g 1 ( x ), , g m ( x ))
X x R n : ( x ) ,
f* () min f ( x ) функциячувствительности
xX
X , 0
X
X , 0
ОСНОВНАЯ ТЕОРЕМА ДЛЯ НЛП
xr X 2
P1,..., Pk , Pi P
Si S ( i ( x), Pi , f ( xr ) ) S ' ( i ( x), Pi , 1 )
f ( x) i ( x), ( x) i ( x), x Pi
inf : X , sup : X P
Теорема 1. Если для
выполнено
то
P
k
i 1
1 2 ,
Si ,
f* (1) f ( xr ) f* (2 ).
P
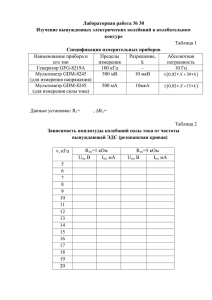
ПРИМЕР ЗАДАЧИ С ИЗОЛИРОВАННОЙ ТОЧКОЙ
Tuy H.: D(C)-optimization and robust global optimization. J. Glob.
Optimization (2010), v. 47, pp. 485-501.
g 2 ( x) 0
x* (1,4,5)
f ( x* ) 1
x (3.74,7.17,2.36) f ( x ) 3.74
g1 ( x) 0
ПРИМЕР ЗАДАЧИ С ИЗОЛИРОВАННОЙ ТОЧКОЙ
X
X , 0
X , 0
РЕЗУЛЬТАТЫ РАСЧЕТОВ ПРИ РАЗЛИЧНЫХ
x* (1,4,5), f ( x* ) 1
x (3.74,7.17,2.36), f ( x ) 3.74
УЧЕТ ЦЕЛОЧИСЛЕННОСТИ
xZ
3
x* (1,4,5)
Метод
Число
итераций
Липшицева функция
585
Градиент удовлетворяет условию Липшица
121
Градиент + сокращение области поиска
55
Без учета целочисленности
2671
0.01
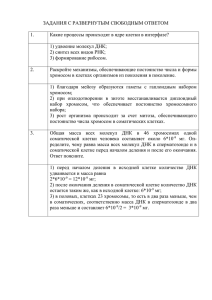
ПРИМЕР: ОПТИМАЛЬНЫЙ ДИЗАЙН
ОТОПИТЕЛЬНОГО КОТЛА
Требуется
минимизировать
затраты f(x) на
производство при
соблюдении
технологических
ограничений g1-g4.
Ts 0.0625 z s , Th 0.0625 zh , z s Z , zh Z
27
РЕЗУЛЬТАТЫ РАСЧЕТОВ
ТЕСТИРОВАНИЕ НА СЛУЧАЙНЫХ ПОЛИНОМАХ (БМ)
Серия
BNB-Solver
BARON
LINDOGLOBAL
n=3
m=4
сред
0.14
1.07
5.42
n=3
m=6
сред
1.79
4.86
E
n=3
m=8
сред
11.24
A
E
Функция энергии
молекулярного кластера
(потенциал Морзе):
1 X i X j
F ( ) e
1 1
i 1 j i 1
n
n
2
где ρ ─ скалярный параметр,
xi и xj ─ трехмерные векторы координат центров
аминокислот i и j, соответственно.
РЕАЛИЗАЦИЯ МЕТОДОВ ГЛОБАЛЬНОЙ
ОПТИМИЗАЦИИ
Много общего в методах решения для
различных задач оптимизации:
безусловная минимизация, нелинейное
программирование, многокритериальное
программирование, частично целочисленное и
целочисленное программирование
Декомпозиционная структура методов
решения
Большие возможности для
распараллеливания
31
ИНСТРУМЕНТАРИЙ
BNB-Solver: библиотека
решения непрерывных
и дискретных задач на кластерах
BNB-Grid: программный
комплекс для
решения непрерывных
и дискретных задач
в среде распределенных
вычислений (ГРИД)
32
СПАСИБО ЗА ВНИМАНИЕ!
ВОПРОСЫ ?
33