16. ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПА
advertisement

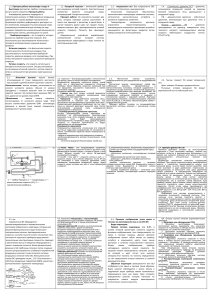
16. ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПА 16.1. Элементарное представление о гироскопе Гироскопом называется твердое тело, имеющее ось, которая при вращении тела может изменять свою ориентацию в пространстве Симметричный гироскоп, ось вращения которого является одновременно его осью симметрии K o K z1 K z2 1 2 K o K z1 K z1 K z2 z К z1 К о z1 2 O К z2 1 Допускаемое приближение в теории гироскопа 16.2. Основные свойства гироскопа Свойство свободного гироскопа dK o mo Fke dt Свободным называется гироскоп, центр тяжести которого неподвижен, а его ось может совершать любой поворот вокруг этого центра ось свободного гироскопа сохраняет неизменное свое направление в инерциальной системе отсчета Теорема Резаля dK o Mo dt e m F o k 0 dK o 0 dt VB M o K o const z Ko VB B O Mo d OB Mo dt x F h y Скорость конца вектора кинетического момента тела относительно центра О равняется по модулю и направлению главному моменту внешних сил относительно того же центра Выводы: 1) под действием силы, приложенной к оси, гироскоп отклоняется не в направлении действия силы, а в направлении вектора момента этой силы; 2) если действие силы прекращается, то останавливается и перемещение оси гироскопа. В этом проявляется свойство устойчивости быстро вращающегося гироскопа. Регулярная прецессия тяжелого гироскопа M o P Pa sin VB 2 BD 2OB sin 2 K o sin z 1 B z1 D Ko 2 VB I z12 sin C VB M o 2 Pa I z1 P O скорость конца вектора кинетического момента тела относительно центра О равняется по модулю и направлению главному моменту внешних сил относительно того же центра Гироскопический эффект M o VB I z1 2 sin Q Q M N , N I z1 2 sin - гироскопическая пара Правило Жуковского: если быстро вращающемуся гироскопу придать вынужденное прецессионное движение, то на подшипники, в которых закреплена его ось, будут действовать силы, образующие пару, с моментом, стремящимся кратчайшим путем установить ось собственного вращения параллельно оси прецессии так, чтобы направления векторов 1 и 2 при этом совпали z1 N 1 Ko Q D 2 B O Q A N D 2 N A B N 1 l M N , N Nl I z1 2 I z1 2 N l z