Текст статьи Гриняк - Владивостокский государственный
advertisement

УДК 519.68:15:681.5
НЕЧЕТКОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРА ДВИЖЕНИЯ ПРИ
МНОГОМОДЕЛЬНОМ СОПРОВОЖДЕНИИ ТРАЕКТОРИИ СУДНА
ОБЗОРНОЙ РЛС
В.М. Гриняк,
Владивостокский государственный университет экономики и сервиса,
А.С. Девятисильный
Институт автоматики и процессов управления ДВО РАН, г. Владивосток
FUZZY LOGIC MANEUVER DETECTOR FOR MULTYMODEL TARGET
TRACKING BY 2D RADAR
V.M. Grinyak,
Vladivostok state university of economics and services
A.S. Devyatisilny
Institute of automation and control processes FEBRAS, Vladivostok
Рассматривается задача сопровождения траектории объекта в современных
системах управления движением на море при обработке навигационных данных
двухкоординатной
РЛС
кругового
обзора.
Обсуждается
проблема
качества
сопровождения малоразмерных судов при их маневрировании. Предлагается нечеткий
алгоритм оценки степени маневра, основанный на машине нечеткого вывода типа
Мамдани, позволяющий выбирать параметры фильтрации при многомодельном
сопровождении судна. Алгоритм обеспечивает устойчивость сопровождения и
уменьшает вероятность его срыва.
Target tracking problem for vessel traffic systems with 2D radars is considered.
Problem of small high-manuever vessels tracking quality is discussed. Algorithm for robust
track-while-scan tracking based on Mamdani fuzzy logic maneuver detector and multymodel
estimation is offered.
Ключевые слова: управление движением судов, сопровождение траектории,
радиолокационные измерения, нечеткая система типа Мамдани, оценка траектории
движения.
1
Keywords: vessel traffic system, target tracking, radar measurements, Mamdani fuzzy
logic system, trace estimation.
Работа выполнена в рамках Государственного задания высшим учебным
заведениям в части проведения научно-исследовательских работ, проект № 7.2104.2011
Введение
Важнейшей
задачей
судовождения
является
обеспечение
безопасности
судоходства, особенно в зонах высокой интенсивности движения. В акваториях
морских портов решение этой задачи возложено на автоматизированные береговые
системы управления движением (СУДС). Современные СУДС представляют собой
наукоёмкие и сложные в техническом и организационном отношении предприятия [1,
2, 3], включающие в себя совокупность средств обнаружения, измерения, передачи и
обработки данных, анализа, интерпретации, визуализации информации и выработки
управляющих решений.
При всей многоаспектности проблем, сопутствующих построению современных
СУДС, функциональным ядром таких систем являются их навигационные функции, т.е.
функции, решающие задачу определения траекторий объектов, находящихся в зоне
ответственности.
Несмотря
на
развитость
современных
средств
глобальной
спутниковой навигации, главным информационным элементом СУДС на море,
способным обеспечить надёжность и автономность их функционирования, являются
двухкоординатные радиолокационные станции (РЛС) кругового обзора.
При
управлении
движением
судов
для
предотвращения
столкновений
формируется оценка экстраполированных координат каждого судна, на основе которых
определяется возможность опасного сближения. Информационную базу для такой
оценки
дают
специальные
алгоритмы
сопровождения
траектории
судна.
Сопровождение траектории – это динамический процесс соотнесения условной точки,
принятой за объект, с радиолокационным изображением объекта. Инициация этого
процесса называется захватом объекта, непроизвольное (аварийное) прекращение
такого
процесса
-
срывом
сопровождения
(срывом
захвата).
С
процессом
сопровождения тесно связано понятие строба, а именно, - с тем обстоятельством, что
протяжённый физический объект необходимо отождествить с точкой. Строб - область
радиолокационного
образа,
используемая
для
преобразования
в
точку,
отождествляемую затем с измеренными координатами объекта. Процедура такого
2
преобразования называется стробированием. В простейшем варианте стробирование
представляет собой определение «центра масс» амплитуд отраженного сигнала в
области строба; для описания линейных размеров этой области принят термин «ширина
строба».
Главное
назначение
совокупности
процедур
обнаружения,
захвата,
стробирования и сопровождения - формализация измерительной информации,
формирование измерений координат движущегося объекта на протяжении всей его
траектории [4].
При решении задач обеспечения навигационных функций СУДС особенно
актуальной становится проблема работы алгоритмов сопровождения на участках
маневра судов, характеризующихся несоответствием между реальным движением
судна и моделью движения, используемой в алгоритме. В результате этого точность
сопровождения траектории снижается, а формируемая информация о возможности
опасного сближения судов становится ненадёжной. Известные подходы к повышению
точности сопровождения траектории маневрирующего судна базируются на решении
задачи обнаружения начала и окончания маневра и соответствующем изменении
параметров алгоритма сопровождения. Такая схема приводит к известным - и -
- фильтру [5] или фильтру Калмана [6] в сочетании с обнаружителем маневра.
Для разрешения неопределенности при сопровождении траектории судна может
также использоваться адаптивный подход Байеса. Этот подход заключается в том, что
учитываются все возможные варианты движения судна (и равномерного, и
маневренного), для каждого варианта определяется его вероятность. Траектория судна
описывается при этом несколькими моделями и предполагается, что процесс перехода
между ними описывается односвязной цепью Маркова [7]. Сущность таких алгоритмов
состоит в объединении гипотез о возможных моделях движения судна, а сами
алгоритмы называются многомодельными.
В
настоящей
работе
рассматривается
сопровождения, основанный на реализации -
многомодельный
алгоритм
фильтра с различным числом
измерений, используемых для формирования оценки состояния. Выбор из множества
полученных оценок предлагается осуществлять с помощью аппарата нечеткой логики,
ориентированного на неявное обнаружение маневра судна и оценки его характера.
Одним из преимуществ предлагаемого подхода является устойчивость сопровождения
траектории высокоманевренных судов стробом небольшой ширины. Последнее
качество приобретает существенный вес при работе СУДС в условиях летней
3
навигации, когда движение маломерных скоростных высокоманевренных судов
(прогулочных
катеров, яхт
и т.п.) приобретает
характер разнонаправленных
судопотоков с предельными значениями насыщенности и интенсивности.
Модельные представления и постановка задачи
Рассмотрим следующую модель движения объекта
x(k 1) x(k ) v x (k ) q x (k ),
y(k 1) y(k ) v y (k ) q y (k )
здесь k
- идентификатор (порядковый номер) момента времени,
(1)
x(k ), y (k )
-
координаты объекта в момент времени t k ; v x (k ), v y (k ) - компоненты вектора скорости
объекта, q x (k ), q y (k ) - компоненты вектора случайных немоделируемых параметров
движения, t k 1 t k .
Пусть измеряемыми параметрами являются декартовы координаты объекта.
Тогда модель рассматриваемой задачи можно представить следующим дискретным
матричным уравнением «состояние-измерение»
x k 1 x k q k ,
z k Hx k rk .
Здесь xk ( x(k ), v x (k ), y(k ), v y (k )) T
(2)
- вектор состояния объекта, включающий его
координаты и их производные (Т – символ транспонирования), q k
- вектор
немоделируемых параметров, z k - вектор измерений, rk - вектор погрешностей
измерений. Имея в виду (1), матричные коэффициенты и H системы уравнений (2)
равны, соответственно
1 0 0
0 1 0 0
1 0 0 0
, H
.
0 0 1
0 0 1 0
0 0 0 1
Модель оценивания вектора состояния x k по измерениям z k может быть
представлена следующим уравнением
xˆ k 1 xˆ k K ( z k 1 Hxˆ k ) ,
Здесь x̂ k - оценка вектора состояния, K - матричный коэффициент.
4
(3)
Известно множество подходов к выбору матрицы K . В настоящей работе выбор
сделан в пользу популярного в практических приложениях алгоритма, основное
достоинство которого – низкие требования к вычислительным ресурсам [5]. В этом
алгоритме матрица K имеет вид
K
/
0
0
0
/
0
Сходимость
алгоритма
.
обеспечивается
(4)
выполнением
условия
0 1,
0 1. Коэффициенты и выбираются исходя из требований чувствительности
алгоритма к немоделируемым манёврам судна q k и ошибкам измерений rk . Показано
[8], что соотношение коэффициентов 2 /( 2 ) является оптимальным.
Примем, что коэффициенты и в формуле (4) выбираются по следующему
правилу:
k
2(2k 1)
6
, k
,
(k 2)( k 1)
(k 2)( k 1)
где k - порядковый номер момента времени в формуле (3). Пусть J - число измерений
(и, соответственно, итераций), участвующих в оценке вектора состояния
xk
итерационной процедурой (3), так что k 1, J . При увеличении J коэффициенты и
асимптотически уменьшаются до 0, поэтому алгоритм (3), реализованный с
большим J будет успешно сопровождать объекты, движущиеся прямолинейно и
равномерно, но он не сможет быть использован для сопровождения маневрирующих
объектов.
Пусть xˆ i( J ) - оценка вектора состояния системы в момент времени t i ,
полученная итерационным алгоритмом (3) при обработке J последних измерений.
Если при этом задача одновременно решается при J , J 1, J 2 , …, и, наконец,
только при двух измерениях (минимально возможном их количестве), то тогда в
момент времени ti будем иметь кортеж векторов оценки
(J )
(J )
( 2)
(3)
( 4)
Xˆ i = { xˆ i , xˆi , xˆ i , …, xˆ i }.
5
(5)
Задача сопровождения траектории сводится, таким образом, к проблеме выбора вектора
состояния из кортежа, порождаемого множеством моделей с различными значениями
J.
Метод решения задачи
Введем вектор z k 1 z k 1 Hxˆ k 1 , характеризующий невязку измерения при
(J )
оценке вектора состояния уравнением (3). Пусть z i
- евклидова норма вектора
невязки z k 1 , полученного в момент времени t i при реализации итерационного
алгоритма (3), обрабатывающего J последних измерений.
Таким образом, при
сопровождении объекта в каждый момент времени t i наряду с кортежем векторов
оценки (5) будем иметь кортеж норм векторов невязок
i(J ) = { z
( 2)
,
i
z
(3)
,
i
z
( 4)
,
i
(J )
…, z i
}.
(6)
Элементы кортежа (6) являются, по сути, основным информативным признаком,
характеризующим качество сопровождения объекта алгоритмом (3-4) с тем или иным
значением J . Для анализа качества сопровождения целесообразно перейти к кортежу
относительных величин
(J )
i = L(i 2) , L(i3) , L(i 4) ,..., L(i J )
где
( j)
Li
z
( j)
i
(7)
, - величина, характеризующая среднеквадратичное отклонение
погрешности измерений rk в системе (2).
Введем лингвистическую переменную Qi( j ) , j 2, J «Качество сопровождения
алгоритмом (3-4) в момент времени t i по j последним измерениям» с термами
«Хорошее» и «Плохое». Пусть термы имеют следующие функции принадлежности,
определённые на универсальном множестве u 0,3 :
хорошее (u) 1
1
,
1 exp(-a 1 (u - c1 ))
1
плохое (u)
.
1 exp(-a 2 (u - c 2 ))
(8)
Введём лингвистическую переменную Pi «Характер движения судна в момент
времени t i » с термами «Равномерное», «Почти равномерное», «Маневренное» и
6
«Высокоманевренное». Пусть термы имеют следующие функции принадлежности,
определённые на универсальном множестве v 2, J :
высокоманевренное (v) 1
1
,
1 exp(-a 3 (v - c 3 ))
(v c 4 ) 2
,
маневренное (v) exp
a
4
(v c5 ) 2
,
a
5
почти равномерное (v) exp
равномерное (v)
(9)
1
.
1 exp(-a 6 (v - c 7 ))
Пусть переменные Qi( j ) обрабатываются машиной нечеткого вывода типа
Мамдани [9], на вход которой подается кортеж величин (7), а на выходе формируется
числовое значение mi - номер вектора состояния, выбираемого из кортежа (5). Машина
нечеткого вывода работает согласно системе правил, представленной в таблице 1.
Таблица 1.
Система правил машины нечеткого вывода типа Мамдани (уровень 1)
№
Qi( 2)
Qi(3)
Qi( 4)
…
Qi( J 1)
Qi( J 1)
Qi( J )
Pi
1
Хорошее
Хорошее
Хорошее
…
Хорошее
Хорошее
Хорошее
P1
2
Хорошее
Хорошее
Хорошее
…
Хорошее
Хорошее
Плохое
P2
3
Хорошее
Хорошее
Хорошее
…
Хорошее
Плохое
Плохое
P3
…
…
…
…
…
…
…
…
…
J 1
Хорошее
Хорошее
Плохое
…
Плохое
Плохое
Плохое
PJ 1
J
Плохое
Плохое
Плохое
…
Плохое
Плохое
Плохое
PJ
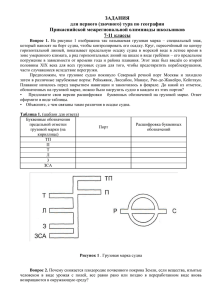
Работу нечеткого алгоритма сопровождения траектории можно, таким образом,
окончательно представить двухуровневой иерархической схемой, показанной на
( j)
рисунке 1. Здесь Li
( j)
Li
- величины кортежа (7) в момент времени t i (вход), если
3 , то вход принимается равным 3; mi - определённый системой типа Мамдани
M1 (уровень 1) в момент времени t i номер элемента кортежа (5).
7
Рис 1. Схема работы нечеткого алгоритма сопровождения траектории
Величины mi и mi 1 подаются на вход системы типа Мамдани M 2 (уровень 2).
На выходе этой системы формируется числовое значение m , которое и принимается за
окончательное значение номера элемента кортежа (5). Машина нечеткого вывода M 2
работает согласно системе правил, представленной в таблице 2.
Таблица 2.
Система правил машины нечеткого вывода типа Мамдани (уровень 2)
№
Pi 1 (вход 1)
Pi (вход 2)
Pi (выход)
1
Высокоманевренное
Высокоманевренное
Высокоманевренное
2
Маневренное
Высокоманевренное
Маневренное
3
Почти равномерное
Высокоманевренное
Почти равномерное
4
Равномерное
Высокоманевренное
Равномерное
5
Высокоманевренное
Маневренное
Маневренное
6
Маневренное
Маневренное
Маневренное
7
Почти равномерное
Маневренное
Почти равномерное
8
Равномерное
Маневренное
Равномерное
9
Высокоманевренное
Почти равномерное
Почти равномерное
10
Маневренное
Почти равномерное
Почти равномерное
11
Почти равномерное
Почти равномерное
Почти равномерное
12
Равномерное
Почти равномерное
Равномерное
13
Высокоманевренное
Равномерное
Равномерное
14
Маневренное
Равномерное
Равномерное
15
Почти равномерное
Равномерное
Равномерное
16
Равномерное
Равномерное
Равномерное
8
Если получившееся m - не целое число, то оно округляется до ближайшего
целого. Обработка двух соседних mi машиной нечеткого вывода M 2 необходима для
повышения устойчивости работы системы при больших ошибках измерений (для
фильтрации случайных выбросов).
Настройка описанной системы состоит в задании максимального количества
измерений J , параметров функций принадлежности a1 ,..., a6 , c1 ,..., c6 , значений
лингвистической переменной Pi и величины , характеризующей погрешность
измерений.
Результаты численного моделирования
При моделировании задачи было принято, что информационной базой СУДС
является двухкоординатный радар кругового обзора (например, типа Raytheon) с
периодом обращения 3с и разрешением по углу и дальности, соответственно,
0.03 и r 6 м. Максимальное количество измерений было принято равным
J 10 . Принятые значения лингвистической переменной Pi приведены в таблице 3.
Таблица 3.
Значения лингвистической переменной Pi
i
Pi
1
равномерное
2
равномерное
3
почти равномерное
4
почти равномерное
5
почти равномерное
6
маневренное
7
маневренное
8
маневренное
9
высокоманевренное
10
высокоманевренное
Заданные значения параметров функций принадлежности (8) и (9) приведены в
таблице 4 (в данном случае параметры задаются экспертом, система не подвергается
настройке на обучающей выборке, см. также рис. 2 и 3).
9
Таблица 4.
Значения параметров функций принадлежности
i
ai
ci
1
5.0
1.5
2
5.0
1.5
3
6.0
3.0
4
2.0
4.5
5
2.0
7.5
6
6.0
9.0
Рис 2. Функции принадлежности термов «Хорошее» (сплошная линия) и «Плохое»
(пунктир).
Рис 3. Функции принадлежности термов «Высокоманевренное» (сплошная
линия), «Маневренное» (пунктир), «Почти равномерное» (точки) и «Равномерное»
(точка-пунктир).
Величину
трудно
задать
априорно.
Суть
проблемы
в
том,
что
радиолокационный образ судна при высоком разрешении радара представляет собой не
одиночное значение амплитуды, а целую матрицу таких амплитуд, сложно
распределённых и зависящих от ориентации судна и расположения на нем локальных
источников отраженного эхо-сигнала [10] (рис. 4). Соответственно и вероятностные
характеристики
ошибок
измерений
rk
10
можно
априорно
оценить
только
приблизительно, с точностью до порядка величин. Поэтому величину предлагается
приближенно оценивать по следующей формуле:
k
zi
ˆ k i 1
( 2)
k
,
где k - порядковый номер момента времени, прошедшего от начала сопровождения
судна.
Рис 4. Отраженный радиолокационный эхо-сигнал судна на фоне эхо-сигналов
подстилающей поверхности (моря).
На рисунке 5 показана моделируемая траектория движения судна. Вначале
судно движется прямолинейно и равномерно, а затем совершает манёвр – поворот с
радиусом 300м. (такие кинематические свойства вполне характерны для современных
маломерных судов).
Рис 5. Траектория движения судна
На рисунке 6 показан результат решения задачи сопровождения для судна,
движущегося по изображенной траектории со скоростью 10 м/с (левая колонка
рисунков) и 20 м/с (правая колонка рисунков). Здесь t - время, прошедшее от начала
11
сопровождения траектории, - длина вектора погрешности оценивания положения
судна по мере его движения (рис. 6а и 6б). В данном случае величина дает
представление о ширине строба, необходимого для устойчивого сопровождения
объекта. Так, при скорости судна 10 м/с погрешность оценки положения судна на
прямолинейном участке траектории (интервал времени [0, 45] секунд
и [90, 120]
секунд) составляет 10-12 метров, а на участке маневра (интервал времени [45, 90]
секунд, заштрихованная область оси абсцисс) – не более 25м. При скорости судна 20
м/с погрешность оценки положения судна на прямолинейном участке – 10-12 метров,
на участке маневрирования – не более 27 метров. Такие значения лишь незначительно
превышают характерные геометрические размеры маломерного судна; это означает,
что строб с радиусом, например, 30 метров, дает возможность устойчиво сопровождать
траекторию
судна
в
насыщенном
судопотоке
даже
при
его
интенсивном
маневрировании.
Рис 6. Работа алгоритма сопровождения; штрихами по оси абсцисс показан участок
маневрирования судна.
Рисунки 6в и 6г показывают значение величины m ( m - номер вектора в
кортеже (5), по сути - количество измерений в выбранном нечёткой системой для
окончательной оценки - фильтре) по мере движения судна. Видно, что на
прямолинейной траектории алгоритм устойчиво работает при максимальных значениях
m , равным 9 и 10, что соответствует минимальным значениям коэффициентов и , а
12
при
маневре
(заштрихованный
участок
оси
абсцисс)
количество
измерений,
участвующих в оценке параметров движения судна уменьшается до 5-8 (скорость
движения судна – 10 м/с, рис. 6в) и 3 (скорость движения судна – 20 м/с, рис. 6г).
Замечательное свойство алгоритма - быстрая реакция на изменение характера
движения судна (начало и окончание маневрирования) – даже при высокой скорости
движения изменение величины m с максимального до минимального (и наоборот)
происходит не более чем за 10 секунд (участок [65, 75] секунд на рисунке 6г). Это
определяет исключительно высокую устойчивость сопровождения траектории по
отношению к срыву.
Рисунки 6д и 6е дают значение оценки величины , используемой при работе
алгоритма. Видно, что по прошествии приблизительно 1 минуты (что соответствует 20
измерениям) значение становится достаточно стабильным и корректно отражает
среднеквадратичную погрешность измерений координат (в данном случае - около 10
метров).
Заключение
При решении задачи сопровождения для насыщенных потоков маломерных
маневрирующих
судов
повышается
вероятность
срыва
сопровождения
и,
соответственно, нарушения оптимальных режимов работы СУДС при обеспечении
безопасности коллективного движения. Предложенная в работе нечеткая модельная
интерпретация задачи сопровождения судна позволяет, как показывают результаты
эксперимента, существенно снизить вероятность срыва сопровождения стробом
небольшого радиуса.
Решение задачи сопровождения в лингвистических переменных с термами
«Равномерное», «Почти равномерное», «Маневренное» и «Высокоманевренное»
позволяет вербально оценить характер движения судна. Такая способность к
обобщению свойств траектории в перспективе даёт возможность построения системы
экспертных оценок безопасности коллективного движения на акватории.
Результаты работы ориентированы на автоматизацию и расширение функций
современных систем управления движением судов.
Список литературы
13
1. Девятисильный А.С., Дорожко В.М., Гриняк В.М. и др. Система экспертных
оценок
состояния
безопасности
на
морских
акваториях
//
Информационные
технологии. - 2004. - №11. - С. 48-53.
2. ОАО Норфес [Электронный ресурс] – Режим доступа http://www.norfes.ru/
3. Юдин Ю.И. Механизм предвидения в организационно-технических системах
управления судовыми ключевыми операциями // Наука и техника транспорта. - 2007. №1. - С. 74-81.
4. Кузьмин С. 3. Основы теории цифровой обработки радиолокационной
информации. - М.: Сов. радио, 1974. - 431 с.
5. Тихонов В. И., Теплинский И. С. Квазиоптимальное слежение за
маневрирующими объектами // Радиотехника и электроника. - 1989. - Т.34. №4. - C.
792-797.
6. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем. М.:
Едиториал УРСС, 2010, 400 с.
7. Бакулев П.А., Сычев М.И., Нгуен Чонг Лыу Многомодельный алгоритм
сопровождения траектории маневрирующей цели по данным обзорной РЛС //
Радиотехника. – 2004. - №1.
8. Benedict T. R., Bordner G.R. Synthesis of an optimal set of radar track-while-scan
smoothing equations// IRE Trans, on AC-1, July 1962, p. 27-32.
9. Круглов В.В., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные
нейронные сети. – М.: Физматлит, 2001. – 224с.
10. Дорожко В.М. Имитационная модель радиолокационного эхо-сигнала //
Дальневосточный математический журнал. - 2001. - №1. - С. 98-113.
14