Диагностика пучков заряженных частиц
advertisement

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Физический факультет
Кафедра радиофизики
В. П. ЧЕРЕПАНОВ
ДИАГНОСТИКА ПУЧКОВ ЗАРЯЖЕННЫХ ЧАСТИЦ
Курс лекций
Новосибирск
2007
УДК 621
ББК В381.1
Ч 46
Черепанов В. П.
Диагностика пучков заряженных частиц: Курс лекций / Новосиб. гос.
ун-т. Новосибирск, 2007. 100 с.
ISBN 978-5-94356-533-5
Данный курс лекций читается в течение ряда лет студентам физического факультета НГУ, специализирующимся на кафедре радиофизики.
Курс содержит описание не возмущающих пучок методов измерения
его параметров: тока, заряда, положения, формы, размеров и др. Кроме
того, описаны принципы работы и конструкции различных датчиков: электростатических, полосковых, тока изображения и др. Рассмотрены различные схемотехнические приёмы построения систем диагностики и управления: длинные линии и трансформаторы, фильтры постоянного импеданса и
дуальные цепи и др.
Предназначен для студентов физических и физико-технических специальностей, а также для специалистов в области измерительной электроники и диагностики пучков.
Рецензент
д-р физ.-мат. наук Е. Б. Левичев
ISBN 978-5-94356-533-5
Новосибирский государственный
университет, 2007
Черепанов В. П., 2007
2
ОГЛАВЛЕНИЕ
1. Введение
6
Уравнения Максвелла …………………………………………….……… 6
Поля вблизи проводящей стенки .......…………………………………… 7
Поле плоской волны ……………………………………………………… 8
Отражение плоской волны от проводящей стенки …………………... 9
Отражение плоской волны от диэлектрика .……………………………. 9
Отражение плоской волны от ферромагнетика ……………………….. 11
Волновое сопротивление вакуума ……………………………………... 12
Расчёт волнового сопротивления линии ………………………………. 12
Предел пространственного и временного разрешения
электромагнитных датчиков ………………………………………….… 13
2. Электростатические датчики
15
Классический электростатический датчик положения пучка ……… 15
Мультипольные моменты заряда изображения …………………..….. 16
Заряды на Х-электродах датчика ..……………………………………… 17
Некоторые конструкции электростатических датчиков положения ….17
Симметричная витая конструкция ………....…………………..…….… 18
Технологичная конструкция ………………………………………….… 18
Методы формирования нормированного сигнала положения пучка ... 19
Классическая схема нормировки на базе усилителей с АРУ ……….... 19
Фазовый метод нормировки ………………………………………….… 20
Принцип работы фазового дискриминатора ...…………………...……. 21
Электростатический датчик в качестве датчика тока пучка ...…..…… 22
3. Методы детектирования сигналов
23
Диодный детектор синусоидального сигнала …………………….....… 23
Усреднение шумов ………………………………...……………………. 24
Преобразование частот и синхронное детектирование сигналов ….… 25
Спектральный анализ ………………………………………………….... 26
Измерение заряда сгруппированного пучка ……………..……………. 27
Преобразование сигнала и шума ………………………………..……… 28
Режим детектирования на 2-й гармонике ВЧ …………………...…….. 29
Оценка уровня шума в терминах заряда пучка ………………………. 29
Другой метод восстановления постоянной составляющей …………. 30
3
4. Полосковый и пуговичный датчики
31
Полосковый датчик ……………………………………..………………. 31
Пуговичный датчик …………………………………………...………… 33
Способ нормировки и линейность координатной сетки ……………... 35
Координатная сетка датчика положения пучка ………………..……… 36
Координатная сетка датчика квадрупольного момента пучка ……….. 38
5. Датчики тока изображения
40
Теория датчика тока изображения для измерения положения пучка .. 40
Азимутальное распределение тока изображения в стенках идеально
проводящей круглой цилиндрической камеры канала ……………..… 41
Параметры пучка, определяемые по току изображения …………….... 44
Замена интегралов суммами ……………………………………..……... 46
Оценка времени растекания тока изображения ………………..…….... 47
Точное решение задачи о растекании тока изображения в рамках
модели длинного датчика …………………………………….……….... 49
Практический эффект растекания тока изображения ……………….... 51
Датчики тока изображения на канале транспортировки пучков
из накопителя ВЭПП-3 в накопитель ВЭПП-4М ……………...…….... 54
Датчики тока изображения на каналах БЭП–ВЭПП-2000 …..……..… 55
Широкополосный датчик тока пучка ………………………………..… 56
6. Измерение параметров несгруппированного пучка
59
Датчик постоянного тока пучка ……………..…………………………. 59
Измерение параметров пучка по его шумам. Продольные сигналы
пучка …………………………………………….……..………………… 60
Измерение тока и разброса энергии …………………..……………….. 61
Поперечные сигналы пучка …………………………….………………. 63
Измерение хроматичности ……………………………..….…………… 64
Измерение поперечного размера и среднего смещения пучка ………. 65
7. Феррит на высоких частотах
66
Понятие шунтирующего сопротивления ……………………………… 67
Добротность катушки индуктивности на феррите …………....………. 68
Ферритовое кольцо с зазором ………………………………….………. 69
Поглощающее свойство ферритов ……………………………..………. 70
4
8. Длинные линии и трансформаторы
72
Трансформаторы на длинных линиях …………………….…………… 74
Трансформатор без «индуктивности рассеивания» ……...…………… 75
Мостовой трансформатор типа «длинная линия» ……….……………. 76
Некорректные схемы с мостовым трансформатором в качестве
прототипа …………………………………………………..……………. 77
Двойной балансный смеситель .…………………………..……………. 79
9. Фильтры постоянного импеданса и дуальные цепи
80
Фильтры постоянного импеданса ………………………………….…... 80
Дуальные ФПИ ………………………………………………………….. 82
ФПИ на отрезках линий ……………………………………………..….. 82
Симметричный ФПИ ……………………………………………………. 83
Некоторые применения ФПИ и дуальных цепей. Согласование
фидера ……………….……………………………………………...……. 84
Многокаскадные ФПИ ………………………………………………….. 87
Пример применения дуальной цепи ……………………………..…….. 90
Формирование импульсных сигналов без постоянной составляющей 91
10. Адаптивная система управления протонным синхротроном
93
Концепция системы управления ……………………………………...... 93
Сплайн-интерполирующий ЦАП …………………………………….… 95
Согласование частоты ускоряющего напряжения с уровнем
ведущего магнитного поля ……………………………………………... 97
Формирование частот ВЧ-системы …...……………………………….. 99
Библиографический список
100
5
1. Введение
Уравнения Максвелла
Уравнения Максвелла в системе МКСА (м, кг, с, А), иначе – СИ имеют
следующий вид:
divD – закон Гаусса;
D 0 E P 0 E , P – вектор поляризации среды, divP ;
rotE B t – закон Фарадея;
B 0 ( H M ) 0 H , M – вектор намагничивания среды, rotM j ;
divB 0 – нет магнитных зарядов;
rotH j D t – закон Ампера плюс добавка Максвелла, j E .
Здесь – свободные заряды, j – токи проводимости, – заряды поля
ризации, j – токи намагничивания, 0 4 107 – магнитная постоянная, 0 1 (0c 2 ) – электрическая постоянная.
Коль скоро E – действующее поле, т. е. поле всех зарядов, D – индукция, т. е. поле только свободных зарядов, то логично полагать, что коль
скоро B – действующее поле, то это поле всех токов, а H – индукция, т. е.
поле только токов проводимости. Какие поля действующие, видно из выражения для силы Лоренца:
F q( E v B) .
Тем не менее принято называть B магнитной индукцией. Так, напри
мер, некоторые авторы называют E электрическим полем, D – вектором
электрической индукции, B – магнитной индукцией, а H – «вспомогательное поле, не имеющее специального названия» [1, с. 96]. Впрочем, у
них же встречаем, что «B описывает полное магнитное поле, а D является
вспомогательным вектором» [Там же, с. 99].
В данном курсе лекций E и B – поля, а D и H – индукции.
Выше были приведены соотношения для полей в среде в их традиционном виде:
D 0 E P и B 0 ( H M ) .
Заметим, что их форма различна. Заметим также, что слева в первом
соотношении стоит индукция, а во втором соотношении – поле. Перепишем
первое соотношение таким образом, чтобы слева оказалось поле:
E 01 ( D P) .
6
Такая форма записи ближе к существу дела, так как E есть суперпози
ция D и P (так же, как и B есть суперпозиция H и M ). Как видно, теперь соотношение для электрических полей приобрело ту же форму, что и
соотношение для магнитных полей. А именно:
Слева стоят поля, справа – индукции и векторы поляризации и
намагничивания.
Множитель 01 подобен множителю 0 , так как 01 0c 2 .
Знаки при P и M различны, так как поле в диэлектрике меньше, а
поле в ферромагнетике больше чем обуславливающие их индукции.
Заметим также, что D и P имеют одинаковую размерность, так как
они – непосредственный продукт зарядов (свободных и поляризации),
одинаковую размерность имеют также H и M , так как они – непосредственный продукт токов (проводимости и намагничивания):
divD , divP ,
rotH j D t , rotM j .
Поля вблизи проводящей стенки
Связь полей от однородного пучка электронов вблизи проводящей
стенки камеры находим путём взятия подходящих интегралов (здесь 1 ,
1 ).
Z
Z
Y
X
X
Y
Dz
Hx
Рис. 1.1
Первый интеграл берётся по объёму коробочки на рис. 1.1 (слева), которую
сечёт стенка, второй – по площади контура на рис. 1.1 (справа):
divD dv Dz dxdy dxdy Dz , или Ez 0 ,
V
7
rotH j D tds
H x dx J y dx H x J y , или Bx 0 J y .
S
Здесь , J y v y – поверхностная плотность заряда и линейная плотность тока. Как видно, наиболее простым образом с поверхностной плотностью заряда и линейной (или поверхностной) плотностью тока связаны
пристеночные электрическая и магнитная индукции.
Итак, при движении пучка со скоростью v y связь между сопровождающими его электрической и магнитной индукциями имеет вид (здесь –
возле нижней стенки камеры) H x J y v y Dz v y , т. е. H x v y Dz . Аналогично Bx 0 J y 0v y 0 0 E z v y , т. е. Bx v y c 2 E z . Или в вектор
ной форме H v D , B v E c2 . Обратим внимание, что здесь v –
скорость движения пучка, а не скорость распространения поля в среде.
Поле плоской волны
На рис. 1.2 плоская волна распространяется вдоль оси Y между двумя
проводящими плоскостями в среде с ( , ) . Серым цветом помечена зона
её текущего присутствия. Здесь система
Z
координат
такова
E
EB
(правая
тройка
XYZ),
Y
lz
что все компоненты
B
X
волны положительны.
Проинтегрируем
закон Фарадея по
площади контура в
Рис. 1.2
области фронта волны лежащего в плоскости (YZ). Контур обходится по часовой стрелке, и
вектор d s направлен соответственно от нас:
B
d d
rotEds Edl E z l z
ds
Bds
Bx l z v y t Bx l z v y ,
t
dt
dt
S
L
S
S
т. е. Ez v y Bx . Или в векторной форме E v B .
Здесь применён следующий приём. Так как форма нашего контура не
зависит от времени, производная по времени вынесена за знак интеграла.
А затем интеграл взят только по области присутствия поля и под знаком
дифференцирования оказался поток, зависящий от времени.
8
Проинтегрируем закон Ампера, расположив контур интегрирования в
горизонтальной плоскости (XY). Получим H x v y Dz . Или в векторной
форме H v D .
Так как E vB v( 0 H ) v( 0 (vD)) v( 0 (v( 0 E ))) , необходимо
выполнение условия v 2 0 0 1 . Следовательно, скорость распространения волны в среде v c
.
Отражение плоской волны от проводящей стенки
На рис. 1.3 плоская
волна распространяет
ся слева направо вдоль
Z
E
оси Y между двумя
EB
Y
проводящими плоско
X
B
стями и падает на проE1
E2
водящую стенку. Проинтегрируем левую и
правую части закона
E
Фарадея по площади
изображённого
на
рис. 1.3 контура после
Рис. 1.3
того, как фронт поля
выйдет за его пределы:
Bds 0 rotEds Edl Ez1 Ez 2 l z , т. е. E z1 E z 2 .
t
S
S
L
Но поле справа от стенки равно нулю. Следовательно, Ez1 Ez 2 0 . Соответствующая суперпозиция падающей и отражённой волн изображена в
нижней части рис. 1.3.
Интегрирование закона Ампера по контуру, лежащему в плоскости
(XY), даёт H x1 H x 2 l x J z l x , т. е. H x1 H x 2 J z . Но так как H x 2 0 , то
сумма индукций падающей и отражённой волн H x1 J z .
Отражение плоской волны от диэлектрика
На рис. 1.4 плоская волна распространяется слева направо вдоль оси Y
между двумя проводящими плоскостями и падает на диэлектрик.
Интегрируя закон Фарадея по площади изображённого на рис. 1.4 кон
тура, получаем аналогично предыдущему случаю E1 E2 (или D2 D1 ).
9
Но теперь для выяснения полной картины одного условия мало. Интегрирование закона Ампера по контуру лежащему в плоскости (XY) даёт
H1 H 2 . Так как H 2 – поле волны, то H 2 vD2 . Для отражённой волны
H отр cDотр , так как либо магнитное, либо электрическое поле меняет
знак. Следовательно, H1 H Hотр cD cDотр . Но так как суперпозиция D1 D Dотр , то vD2 H 2 H1 c( D Dотр ) c(2D D1 ) или, с
учётом v c , D1 D2
D2 D1 получим
2 D . Отсюда с учётом соотношения
2
D1 D
E
B
EB
E1 D1 0
E 2 D2 0
,
1
2
D2 D
,
1
Dотр D
1
.
1
При 1 амплитуда отраженной волны
E
Eотр E
Рис. 1.4
1
1
стре-
мится к E , что имеет место при коротком замыкании линии распространения как в случае с проводящей стенкой. Да и амплитуда прошедшей
2
волны E2 D2 0 E
стремится к нулю. Однако в нашем случае
1
направо распространяется волна поляризации, порождаемая волной индукции:
2
2
1
P2 D2 0 E2 D
0E
2D
2D .
1
1
1 1
Беспредельный рост поляризации при не должен нас смущать,
так как скорость распространения поляризации v c стремится к нулю и величина полного заряда поляризации за время t будет конечной:
1
q (t ) s l x vt P2 l x vt 2 D
lx c t
2 Dl x ct .
1
10
Отражение плоской волны от ферромагнетика
На рис. 1.5 плоская волна распространяется слева направо вдоль оси Y
между двумя проводящими плоскостями и
падает на ферромагне
E
тик.
Интегрирование
EB
закона Ампера по конту
B
ру, лежащему в плоскоB1 0 H 1
B2 0 H 2
сти (XY), даёт H1 H 2
(или B2 B1 ). Но одH
ного условия для выяснения полной картины
опять-таки мало. ИнтеРис. 1.5
грируя закон Фарадея по
площади контура, лежащего в плоскости (XZ), получаем E1 E2 (или
D1 D2 ). Так как B2 – поле волны, то E2 vB2 . Для отражённой волны
Eотр cBотр , так как либо магнитное, либо электрическое поле меняет
знак. Следовательно, E1 E Eотр cB cBотр . Но так как суперпозиция
B1 B Bотр , то vB2 E2 E1 c B Bотр c2B B1 , или, с учётом
vc
2 B . Отсюда с учётом соотношения B2 B1 по-
, B1 B2
лучим
B1 B
2
1
, B2 B
2
1
, Bотр B
1
1
.
При 1 амплитуда отраженной волны
Eотр cBотр cB
1
1
E
1
1
стремится к E , что имеет место при обрыве линии распространения. Однако в нашем случае имеется прошедшая волна, амплитуда которой
E2 vB2 cB
2
1
2E
распространения v c
1
при стремится к 2E , а скорость
стремится к нулю.
11
Волновое сопротивление вакуума
На рис. 1.6 плоская электромагнитная волна ( E z , B x ) распространяется
вдоль оси Y. Картина полей не изменится, если мы поместим в пространстве две проводящие плоскости в плоскости (XY) с расстоянием между
ними по оси Z равным h .
Введём понятие разности потенциалов (или напряжения) между этими
плоскостями U Ez h 0 h и
понятие полного тока в ленточке шиZ
риной l – I J l c l . Отношение
X
h
напряжения к току называется сопроY
тивлением, в случае линии – волновым
l
сопротивлением или импедансом линии. В нашем случае при h l это
Рис. 1.6
сопротивление называется волновым
сопротивлением вакуума:
U 0 h
1
0 c 0 4 10 7 c 120 Ом 377 Ом .
I
c l h l c 0
Расчёт волнового сопротивления линии
Z
dr
r
a
b
X
Рис. 1.7
На рис. 1.7 изображено сечение коаксиальной линии передачи сигналов.
Рассчитаем импеданс этой линии, используя понятие волнового сопротивления вакуума.
Волновое сопротивление нашей линии является суммой волновых сопротивлений бесконечного числа вложенных коаксиальных линий. Сечения этих
линий разобьём на 2r dr квадратиков.
В результате
b
0
dr
b
120
60 ln .
2r dr
2r
a
a
На рис. 1.8 изображено поперечное сечение несимметричной полоско
120
57 . Здесь
вой линии. Оценим её импеданс величиной 0
n 3 4.8
n – разумное число квадратиков между полосковой линией и землёй.
12
Оценка импеданса будет тем точнее, чем больше это n. Экспериментально
установлено, что ширина полоска в данном случае должна быть около
2.5 мм, чтобы импеданс
линии был равен 50 Ом.
Индуктивность и ём1.4 мм
4.8
кость линии рассчитываются с помощью сле2.8 мм
дующих соотношений:
L , C . Здесь
Рис. 1.8
l c
– время
распространения сигнала по линии длиной l .
Для определения импеданса, например, двухпроводной линии (витая
пара) надо измерить индуктивность короткозамкнутой и ёмкость разомкнутой линии (достаточно длинной). Импеданс и время распространения
сигнала по линии рассчитываются следующим образом: L C ,
LC . Из соотношения l c рассчитывается значение величины
.
Предел пространственного и временного разрешения
электромагнитных датчиков
Пусть R – радиус апертуры круглой камеры канала в области датчика,
продольный размер которого много меньше апертуры камеры, а пучок
движется по оси камеры со скоростью v и состоит из одного электрона
(рис. 1.9). Датчиком может быть электростатический датчик пристеноч-
D Dr
Dy
1
e
Dr
v
y
Рис. 1.9
ного электрического поля, индукционный датчик пристеночного магнитного поля или датчик тока изображения, наводимого электроном в проводящей стенке камеры.
13
Поверхностная плотность заряда изображения должна быть равна радиальной компоненте индукции Dr , поскольку поле в металле равно нулю. Радиальная компонента поля электрона равна Dr
e
4r 2
sin . Здесь
r 2 R2 y 2 , sin tan
1 tan2 , tan R y . В результате элеменe
тарных расчётов получим Dr
(1 y 2 R 2 ) 3 2 . На рис. 1.10 (слева)
4R 2
изображена соответствующая картинка. Отсюда продольный размер заряда изображения, с учётом релятивистского фактора, равен l0.5 1.53 R .
Здесь E E0 – релятивистский фактор, E – энергия электрона.
Рис. 1.10
Этот расчёт, однако, неверен, поскольку в выражении для индукции
следует учитывать заряды изображения, так как они (в случае проводящей
камеры) – свободные заряды. В разд. 5 получено точное решение задачи о
форме тока изображения. Согласно ему при центральном положении пучка, представленного точечным зарядом, продольная форма заряда изображения имеет (в безразмерном виде) следующий вид:
F (q )
cos(sq )
ds .
I 0 ( s)
Здесь I 0 – модифицированная функция Бесселя, s kR , q y R ,
k 2 – волновое число.
Это выражение – обратное преобразование Фурье спектра -функции
с весом 1 I 0 (s) . Здесь функция передачи 1 I 0 (s) работает как фильтр
нижних частот исходного сплошного спектра пучка на оси камеры. Согласно рис. 1.10 (справа), искомый размер равен l0.5 1.31 R .
14
2. Электростатические датчики
Классический электростатический датчик положения пучка
Рассмотрим камеру канала транспортировки пучка заряженных частиц,
имеющую цилиндрическую форму и, таким образом, однородную по оси Y.
Ось X направлена вправо, если смотреть в хвост пучку, а ось Z направлена
вверх (т. е. имеем правую тройку координат XYZ). Пусть длина пучка много больше апертуры камеры, так что пучок тоже однороден по оси Y в
пределах датчика, продольный размер которого обычно порядка апертуры.
Электроды датчика (ещё говорят – пикап-электроды: pick-up – датчик)
представляют собой части участка камеры определенного продольного
размера l, отделённые от камеры и друг от друга разрезами (рис. 2.1).
В пределах этого участка камеры находится часть пучка, имеющая заряд
q ql l ( ql – заряд на единицу длины). Электроды окружает цилиндр технологического назначения (который, кроме прочего, изолирует вакуум),
Z
Z
X
Y
C
leff l
Рис. 2.1
механически и электрически являющийся продолжением камеры в области
электродов. Ширина разрезов между электродами достаточно мала, чтобы
можно было пренебречь искажениями электрического поля пучка вблизи
разрезов, но достаточно велика, чтобы ёмкости между электродами были
много меньше емкостей электродов на камеру (иначе говоря, на «землю»),
которые должны быть одинаковыми для всех электродов. Последнее требование важно постольку, поскольку непосредственно измеряется не заряд
на электроде, а напряжение ( u q C ).
Если электроды датчика имеют треугольную форму при виде сверху
(вдоль оси Z), то разность зарядов, наводимых на электродах длинным однородным по оси Y пучком, электрическое поле которого не имеет компоненты Y, будет прямо пропорциональна смещению пучка по оси X.
15
На рис. 2.2 изображены два варианта конфигурации электродов датчика. Здесь q ql l – заряд пучка в пределах датчика, а – половина апертуры
датчика,
x0 – смещение пучка по оси Х относительно центра камеры. Вто-
рой вариант лучше тем, что можно аппаратным или расчётным путём получить нормированное значение смещения пучка:
x0 a (q q ) (q q ) .
l
-
+
q q q
x0
a
q q q
q q q
x0
a
q q q
2a
+
l
-
Рис. 2.2
Изобретателями треугольных электродов являются Гольдин и Кузьмин,
доказавшие линейность такого датчика [2].
Ниже линейность датчика с треугольными электродами доказана несколько иначе.
Мультипольные моменты заряда изображения
Коль скоро поле за пределами камеры отсутствует, значения всех мультипольных моментов пучка (всюду имеется в виду часть пучка q ql l в
пределах электродов датчика) совпадают со значениями всех соответствующих мультипольных моментов распределённого по азимуту камеры заряда изображения (с точностью до знака).
В частности, дипольный момент заряда изображения равен произведению смещения тонкого пучка, породившего изображение, на его заряд
(интегрирование производится по азимуту камеры):
d x* xdq* x0q d x .
16
Заряды на X-электродах датчика
Пусть поперечное сечение электродов датчика имеет произвольную
форму (рис. 2.3). Поместим начало координаты X на левой границе электродов. Апертура электродов равна 2а. Форма электродов треугольная при
виде сверху.
x0
q
2a dq ( x) 2a xdq ( x) 2a xq
x
*
q (1
dq*
q q
1
1
*
*
x
1
)dq* ( x) q *
xq*
2a
2a
x
1 *
x a
xq q* q*
q* 0
a
a
a
q q q*
0
x
x0 a
1
q q
q q
x
2a
2a
Рис. 2.3
Вычислим заряды на правом (+) и левом (–) электродах, их разность,
сумму и т. д. (см. соответствующие расчёты на рис. 2.3, справа) и докажем,
таким образом, линейность датчика.
Некоторые конструкции электростатических датчиков
положения пучка
Можно иметь отдельные датчики для измерения смещения пучка по X
и Z, но это дорого. Если же X и Z электроды располагаются рядом (в пределах одного датчика), то имеет место несовпадение геометрического и
электрического центров электродов для измерения смещения пучка по X и
Z из-за неодинаковости межэлектродных емкостей. Впрочем, калибровка
датчиков на предмет коррекции несовпадения геометрических и электрических центров производится в любом случае, так как всегда существует
проблема точности изготовления электродов.
17
Симметричная витая конструкция
На рис. 2.4 изображена развёртка и сборка электродов датчика, который имеет прямоугольное сечение. Межэлектродные ёмкости здесь, в
z
z
x
x
x
x
z
z
z
z
x
x
Рис. 2.4
принципе, одинаковы, однако сделать такую конструкцию достаточно
симметричной непросто из-за сложных выкроек и неизбежных дефектов
последующей формовки.
Технологичная конструкция
На рис. 2.5 изображена развёртка и сборка электродов датчика, который тоже имеет прямоугольное сечение. Следует обратить внимание, что
3
1
1
2
4
1
2
3
4
Рис. 2.5
18
выкройки и формы всех четырёх электродов одинаковы, что позволяет
рассчитывать на хорошую одинаковость межэлектродных емкостей.
Эти электроды, легко видеть, сами по себе имеют не такую форму, которая требуется. В данном случае сигнал с каждого электрода снимается
независимо, а необходимая треугольная конфигурация электродов по X и Z
(при виде сверху или сбоку) реализуется электроникой: те или другие пары электродов объединяются в один треугольный. Можно показать, что
отношение сигнал/шум у такого датчика лучше (при той же длине по пучку), чем у описанного выше датчика с витыми электродами.
Методы формирования нормированного сигнала положения пучка
Импульсные сигналы u q C и u q C с электродов датчика
сначала преобразуются в сигналы вида u u (сумма) и u u
(разность). Делается это для того, чтобы при последующем усилении, преобразовании и передаче этих сигналов по радиочастотным кабелям отличие коэффициентов передачи соответствующих трактов K1 и K 2 не приводило к электрическому смещению нуля датчика. Неодинаковость частотных характеристик трактов и в этом случае, разумеется, приводит к
соответствующим вариациям масштаба при определении смещения пучка, однако это более приемлемо, нежели вариации нуля.
Пусть, для простоты, K1 K K 1 , K 2 K K 1 . Если сигналы суммы и разности сформированы заблаговременно, имеем
K (u u ) K
1
x
x
xx.
K (u u ) K
1
Если же сигналы суммы и разности не формируются с самого начала, в
результате нормировки имеем
K u K u
x
(1 ) ( x )(1 x) .
K u K u
Здесь наблюдается смещение нуля как раз на величину и некоторая нелинейность.
Классическая схема нормировки на базе усилителей с АРУ
На рис. 2.6 изображена схема нормировки на базе двух идентичных
усилителей с автоматической регулировкой усиления (АРУ). Благодаря
петле обратной связи в канале усиления сигнала суммы, на его выходе
поддерживается постоянное выпрямленное напряжение E ˆ K u . На
выходе канала усиления сигнала разности имеем
19
ˆ K (u)
ˆ E ˆ E
ˆ ˆ x .
E
Здесь ̂ и ̂ – амплитуды сигналов и .
u
K (u ) E
Детектор
K (u )
E E0
K (u ) E
Детектор
K (u )
Рис. 2.6
Основным недостатком описанного метода являются высокие требования к идентичности усилителей.
Фазовый метод нормировки
Какая-либо из гармоник исходных периодических импульсных сигналов с электродов датчика преобразуется на промежуточную частоту
(рис. 2.7). Таким способом формируются гармонические сигналы A и B
( ) 2 u
ФПЧ
+
4
+
УО
ФПЧ
-
ФД
3 4
-
ФНЧ
x
УО
( ) 2 u
Рис. 2.7
(рис. 2.8, слева). Далее осуществляется относительный сдвиг сигналов A и
B по фазе на 2 , формируются сигналы суммы и разности этих ортогональных сигналов. Полученные сигналы ограничиваются с помощью уси20
лителей-ограничителей и с помощью фазового дискриминатора (ФД) формируется сигнал фазы между ними:
1 tg( 2) 1 Bˆ Aˆ Aˆ Bˆ
tg( 2) tg( 4 2)
x , 2 arctan(x) .
1 tg( 2) 1 Bˆ Aˆ Aˆ Bˆ
A Ae
i
AB
4
2
f(x) over Range -r1 to r1
r1
1
0.5
2
f ( x)
2
x
1
0.5
0
0.5
1
AB
0.5
B Be
i
r1
3
4
1
r1
x
r1
Рис. 2.8
Если сигнал ФД пропорционален 2 , то x f ( x) arctan(x) . Здесь x
– смещение пучка, а x – то, что получено путём описанной процедуры.
На рис. 2.8 (справа) изображен вид функции f (x) .
Принцип работы фазового дискриминатора
Сигналы A и B логически перемножаются (рис. 2.9) и с помощью ФНЧ
(фильтр нижних частот) выделяется постоянная составляющая, величина
A
B
A B
u out
2
0
2
Рис. 2.9
21
которой линейно зависит от сдвига фаз между сигналами A и B в пределах
2 2 .
Электростатический датчик в качестве датчика тока пучка
Пусть электростатический датчик имеет один сплошной (интегральный) цилиндрический электрод (см. рис. 2.1). Для дальнейших расчётов
существенны следующие параметры ускорителя, пучка и датчика:
периметр ускорителя L;
пучок сгруппирован (т. е. часть периметра свободна от пучка);
полный заряд пучка Q;
длина электрода датчика по пучку много меньше длины пучка;
полная ёмкость электрода на землю (т. е. на камеру) C.
Наблюдаемое напряжение на электроде датчика (в отсутствие разряда
ёмкости через конечное входное сопротивление усилителя) равно
u(t ) ql (t ) l C .
Здесь l – эффективная длина электрода, ql – заряд пучка на единицу длины. С другой стороны, ток пучка сквозь датчик равен
I (t ) ql (t ) l tl ql (t ) vbeam .
Здесь t l – время пролёта пучка вдоль электрода, vbeam – скорость движения пучка. Отсюда связь тока пучка сквозь датчик и напряжения на электроде датчика:
l
l
v
v
v
u (t ) I (t )
I (t )
c I (t ) c I (t ) c .
C vbeam
C vc vbeam
C vbeam
vbeam
Здесь vc – скорость света, – время распространения сигнала по продольной линии датчика, C – волновое сопротивление этой линии.
Для релятивистского пучка выражение принимает простейший вид:
u(t ) I (t ) .
Заметим, что длина электрода не имеет значения с точки зрения чувствительности датчика по току пучка.
22
3. Методы детектирования сигналов
Сигналы многих систем диагностики параметров пучков заряженных
частиц представляют собой импульсы с постоянной или переменной частотой следования. Таковы, например, сигналы электростатических датчиков
положения, тока или заряда пучка. Детектирование сигналов представляет собой процедуру преобразования амплитудных или временных параметров сигналов в сигнал квазипостоянного напряжения (т. е. напряжения,
время изменения которого много больше периода детектируемого сигнала). Различные методы детектирования сигналов характеризуются линейностью, уровнем привносимых шумов, помехоустойчивостью и степенью
сложности реализации.
Наименее сложным в реализации является пиковое детектирование амплитуды сигнала. Однако пиковый детектор заодно детектирует помехи и
шумы, попадающие в полосу усиливаемых частот. Кроме того, характеристика, например, диодного пикового детектора существенно нелинейная.
Уровень нелинейности такого детектора определяется величиной
u0 kT e 25 мВ (при комнатной температуре), которая не мала по сравнению с типичной амплитудой сигнала на выходе линейного широкополосного усилителя (порядка 1 В).
Диодный детектор синусоидального сигнала
Вольтамперная характеристика полупроводникового диода имеет вид
i i0 exp u u0 1. На рис. 3.1 изображена схема пикового детектора.
Пусть на входе детектора имеется гармонический сигнал. Установившееся постоянное напряE
жение на ёмкости (запирающее диод напряжение)
таково, что средний ток через диод за период коu
лебаний сигнала равен нулю (в отсутствие внешней цепи разряда ёмкости):
2
u sin( ) E
1d 0 .
Рис. 3.1
u0
0
Отсюда получаем искомое напряжение на выходе детектора (на ёмкости):
2
u sin( )
1
d
E u0 ln
exp
u u0
2
u0
0
2
2
u
1 u
1
u0 ln
1 sin( ) sin 2 ( ) ... d
u
2
2
u
0
0
0
1
2
exp
23
1 u 2
u 2
.
u0 ln 1 ...
4 u0
4u0
Итак, при малой амплитуде гармонического сигнала (и не гармонического) диодный детектор имеет квадратичную характеристику. Подчеркнём: именно детектор, а не сам по себе диод, как часто говорят и пишут.
В промышленных вольтметрах для детектирования синусоидальных
сигналов применяется детектирование среднего значения модуля сигнала.
При этом фактически детектируются заряды полуволн сигнала с помощью
диодных детекторов тока полуволн. Нелинейность такого детектора мала
благодаря схеме с глубокой отрицательной обратной связью. В отличие от
детектирования пика сигнала, здесь производится усреднение шумов.
Усреднение шумов
При усреднении в течение времени Т зависимость коэффициента передачи шумов от частоты выглядит следующим образом (функция передачи
типа sin x x ):
sin(FT )
.
FT
Шум предполагается «белым», т. е. уровень шума не зависит от частоты. Таков тепловой шум резистора и дробовой шум. Эквивалентная полоса
шумов определяется следующим образом:
KT ( F )
FT KT2 ( F )dF
0
0
sin 2 (FT )
(FT ) 2
dF
1
T
sin 2 ( x)
x2
0
dx
1
1
.
T 2 2T
Здесь осуществляется интегрирование квадрата коэффициента передачи
шумов, так как суммируются мощности шумов на различных частотах.
Пусть реальная схема усреднения представляет собой фильтр нижних
частот первого порядка с частотой среза F0 1 (2 ) :
K ( F ) 1
1 (2F ) 2 .
Тогда эквивалентная полоса шума
F K2 ( F )dF
0
1
1
dF
2
2
1 (2F )
0
1 x
0
1
2
dx
1
1
F0 .
2 2 4 2
Эквивалентная полоса шума колебательного контура связана с его полосой аналогичным образом, т. е. шире в 2 1.57 его полосы пропускания 2F0 (определяемой по уровню передачи напряжения 3дБ ).
24
Преобразование частот и синхронное детектирование сигналов
Когда предметом измерения является положение пучка, существенно
лишь соотношение сигналов с различных электродов датчика. В этом случае достаточно измерить амплитуды тех или иных гармоник периодического импульсного сигнала. Это можно сделать с помощью синхронного
детектора на некоторой фиксированной и сравнительно низкой промежуточной частоте.
С помощью вспомогательного генератора (гетеродина) переносят сигнал первой или второй гармоники исходного периодического импульсного
сигнала на промежуточную частоту. В скобках заметим, что к измерению
амплитуды второй гармоники исходного сигнала обычно прибегают в
условиях большого уровня помех с частотой первой гармоники (например,
от ускоряющего пучок ВЧ напряжения).
Если опорный сигнал смесителя гармонический, то преобразованный
сигнал гармоники пучка близкой к частоте гетеродина выглядит следующим образом:
1
aс cos(сt ) cos( г t ) ac cos(сt ωг t ) cos(сt ωг t) .
2
Таким же образом преобразуется амплитуда шума. Но коль скоро гармоник преобразующихся на промежуточную частоту с г две – сверху
и снизу от гармоники гетеродина, то относительная мощность шума на
выходе смесителя удвоится. Иначе – удвоится эквивалентная полоса шума.
Этот фактор назовём фактором двух боковых полос Nb 2 .
Реально, как правило, опорный сигнал смесителя (т. е. сигнал гетеродина) имеет вид меандра. Относительные уровни гармоник меандра имеют
следующую величину:
4
1
1
signsin( ) sin( ) sin(3 ) sin(5 ) ... .
3
5
В результате дополнительный фактор меандра эквивалентной полосы
шума составит
Nm
(2n 1)
n 1
1
2
2
8
1.23 .
Здесь множитель 4 не учитывается, так как он общий для сигнала и
шума. С точки зрения увеличения шума фактор этот невелик. Более существенным является то, что на промежуточную частоту переносятся также
помехи, спектры которых расположены около нечётных гармоник опорного сигнала имеющего вид меандра.
25
Синхронное детектирование представляет собой перемножение сигнала и опорного гармонического напряжения, частоты которых равны. Однако, коль скоро они в общем случае сдвинуты по фазе друг относительно
друга, применяют два устройства перемножения, опорные сигналы которых сдвинуты по фазе на 2 (это так называемый квадратурный синхронный детектор). Искомая амплитуда гармоники сигнала пучка форми2
2
руется либо расчётным путём ( a asin
), либо с помощью специ acos
альных схем. При этом квадратурный фактор эквивалентной полосы шума N q 2 .
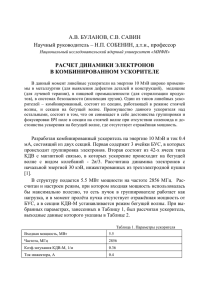
Спектральный анализ
Наиболее перспективным методом измерения амплитуд гармоник сигнала является метод спектрального анализа на основе быстрого преобразования Фурье (БПФ). Традиционно этот метод реализуется с помощью
АЦП типа цифровой осциллограф – АЦП, который осуществляет с высокой частотой (1, 20, 50, и даже 200 МГц) ряд последовательных измерений
входного сигнала. БПФ осуществляется ЭВМ, либо специализированным
цифровым сигнальным процессором (DSP). Такой метод реализован, в
Рис. 3.2
частности, в некоторых осциллографах Tektronix (частота выборок
500 МГц).
На рис. 3.2 (слева) – осциллограмма наводок и их спектр, справа – осциллограмма сигнала и его спектр, снятые с резонаторного датчика тока
однопролётного пучка в канале Б-4 – ВЭПП-3 (ИЯФ) [4].
Видно, что если отношение амплитуд сигнал/наводка около
200 мВ 10 мВ 20 , то отношение спектральных плотностей мощности
26
сигнал/наводка в области спектра сигнала около 60 мВ 100 мкВ 600 . Таким образом, в данном случае эффект детектирования с помощью спектрального анализа (по сравнению с пиковым или другим подобного рода
детектированием) порядка 600 20 30 . Даже если спектр наводки наедет
на спектр сигнала, положительный эффект спектрального анализа сохраняется до тех пор, пока спектр наводки полностью не совпадёт со спектром сигнала.
Измерение заряда сгруппированного пучка
Описываемый ниже метод измерения заряда пучка основан на том, что
при наличии ускоряющего напряжения фазовый размер сепаратрисы (т. е.
размер области устойчивого фазового движения пучка) меньше 2 и, следовательно, часть азимута орбиты заведомо свободна от пучка [3]. В качестве датчика применяется уже упоминавшийся электростатический интегральный электрод, являющийся датчиком азимутальной плотности заряда пучка.
C
U
RC
u out (t )
u
R
l Q
pC
t
u(t)=q(t)/C
Рис. 3.3
На рис. 3.3 изображёна эквивалентная схема датчика и типичная эпюра
напряжения, наводимого пучком на электроде, шунтированным резистором R. Спустя время RC после инжекции пучка в ускоритель пропадает постоянная составляющая сигнала пучка – сигнал «провисает». Здесь
l – эффективная длина электрода; p – периметр ускорителя; q(t) – часть
заряда пучка, локализованного в пределах эффективной длины электрода;
C – полная ёмкость электрода на землю (включает входную ёмкость усилителя и др.); R – входное сопротивление усилителя; Q – заряд пучка;
u – постоянная составляющая исходного не провисшего сигнала u(t).
Предметом измерения является постоянная составляющая исходного
сигнала u(t) очевидно равная величине провисания u выходного сигнала
электрода uout (t ) , которая связана с зарядом пучка следующим образом:
27
u
0
p
p
T
T
0
0
0
0
1
dq dp l dt
dq dp l dp
l
l Q
.
u (t )dt
dq
T
C
T
C
p
pC
pC
A
B
C
D
Рис. 3.4
2
Для детектирования периодического
сигнала наиболее помехоустойчивым и
малошумящим является метод синхронного детектирования (рис. 3.4). Пусть
исходный (не провисший) сигнал u( )
отличен от нуля только в пределах 0, .
Умножим провисший периодический
сигнал A( ) u ( ) u на сигнал B( )
такой, что в пределах 0, он равен 1, а
в пределах ,2 он равен (2 ) ,
так чтобы его среднее за период значение
было равно нулю. Получим сигнал
C ( ) u( ) u B( ) . Его среднее значение как раз равно искомому провиса-
нию:
C( ) u( ) u B( ) uB u B uB D u .
Поясним этот результат. Если среднее значение опорного сигнала
B( ) равно нулю, то при подаче на вход детектора любого постоянного
сигнала получим нуль на его выходе. Для такого детектора, следовательно,
безразлично, провис сигнал или нет.
Преобразование сигнала и шума
Усреднённое напряжение на выходе детектора равно напряжению провисания сигнала на его входе (т. е. имеем преобразование один к одному):
l Q
u
.
LC
Чтобы посчитать преобразование шума, разложим опорный сигнал на
гармонические сигналы. Преобразование амплитуды гармонического
входного сигнала детектора, частота и фаза которого совпадают с частотой
и фазой опорного сигнала, происходит согласно следующему выражению:
1
u cos(t ) cos(t ) u 1 cos(2t ) ,
2
т. е. спектральная плотность мощности шума на выходе детектора уменьшается в 4 раза по сравнению с соответствующей мощностью на входе
28
детектора. Соответствующий фактор преобразования мощности шума –
назовём его фактором гармонического преобразования, N g 1 4 .
Если опорный сигнал B( ) такой, как на рис. 3.4, то фактор преобразования мощности шума имеет величину
2
2
2
1
1
2
.
N
ak2
B 2 ( )d 12 d
d
2
1 2 w 1
k 1
0
0
Здесь w 2 – скважность опорного сигнала B( ) . Результирующий
фактор преобразования мощности шума для описанного синхронного де2
1
тектора равен N N g N 1 4
.
w 1 2( w 1)
Режим детектирования на 2-й гармонике ВЧ
При наличии значительных наводок с
частотой ускоряющего напряжения может быть реализован режим детектирования на 2-й гармонике частоты ускоряющего напряжения, как это изображено на
рис. 3.5. При этом происходит подавление наводимого непосредственно на пикап-электрод сигнала от ускоряющего
резонатора с частотой ускоряющего
напряжения.
0
2
A
B
Рис. 3.5
Оценка уровня шума в терминах заряда пучка
При описанном выше методе синхронного детектирования и времени
усреднения сигнала на выходе синхронного детектора t (с помощью
ФНЧ) эквивалентная полоса шума определяется следующим выражением:
1
Fш
N .
2t
Ниже шум рассчитан для режима детектирования со скважностью
B( ) w 3 2 , который может быть применён при режиме ускорения с
равновесной фазой s 30 . Этот же режим может быть применён при
s 60 и синхронном детектировании на второй гармонике ВЧ.
Если
время
усреднения
N 2(w 1) 1
1
t 100 мкс ,
Fш 5кГц .
Шум
29
то
с
резистора
учётом
200 Ом
фактора
( 1 S ,
S 5 мА В – крутизна входного полевого транзистора) в полосе 5 кГц
имеет величину порядка 140 нВ. С учётом фактора шума входного усилителя порядка 10 дБ, результирующий уровень шума оценивается величиной 0.4 мкВ.
При периметре ускорителя около 250 м (ускоритель «Нуклотрон»,
Дубна) эффективной длине электрода 250 см и полной входной ёмкости
500 пФ это соответствует, в терминах числа однозарядных частиц пучка,
шуму
Nш
p Cu 250 500 10 12 0.4 10 6
1.25 10 5 .
l e
2.5
1.6 10 19
Другой метод восстановления постоянной составляющей
На рис. 3.6 изображена блок-схема синхронного детектора, реализующая метод не критичный к скважности опорного сигнала w (в отличие от
описанного
выше).
Здесь имеется в виду
u ( ) u * ( )
ФНЧ
скважность сигнала
На АЦП
замыкания
ключа
K ( ) . Время замыкаИнтегратор
ния
ключа может быть
K ( )
инт T w
меньше интервала свободного от сигнала
u * ( )
пучка – провисание
u ( )
всё равно будет детекK ( )
тироваться правильно.
Кроме того, постоянная времени интегратора инт не обязательно должна быть в
Рис. 3.6
точности равна T w
(здесь T – период сигнала). Однако чем меньше время замыкания, т. е. чем
больше скважность опорного сигнала K ( ) ), тем больше уровень преобразованных шумов.
Такой метод восстановления постоянной составляющей используется в
телевизионной технике.
30
4. Полосковый и пуговичный датчики
Электроды классического электростатического датчика положения
пучка имеют сложную форму, приличную длину (порядка апертуры камеры) и при этом принципиально не согласованы: каждый электрод имеет в
качестве нагрузки усилитель с большим входным импедансом. Поэтому
датчик положения пучка, который должен работать на достаточно высоких
частотах (с короткими пучками) имеет несколько электродов либо в виде
линий с волновым сопротивлением 50 Ом (strip-line pick-up – полосковый
датчик), либо в виде небольших круглых дисков заподлицо с вакуумной
камерой (button pick-up – пуговичный датчик).
Полосковый датчик
На рис. 4.1 схема
тически
изображён
полосковый
датчик.
Здесь он представлен
одной полосковой линией (реальный датчик
имеет 2 или 4 линии).
Время распространеou1
ou 2
ния сигнала по линии
равно . Линия расРис. 4.1
положена на определённом расстоянии от
стенки камеры внутри неё вдоль направления движения пучка, что обеспечивает однородность и желаемую величину её импеданса. Оба конца ли-
Рис. 4.2
нии нагружены на кабели, импедансы которых равны импедансу линии
31
(обычно 50 Ом). В принципе сигналы могут сниматься с любого из концов
линии. Если скорость движения пучка равна скорости распространения
сигнала по линии (порядка скорости света), то сигнал имеется только с той
стороны линии, с которой пучок влетает в датчик.
На рис. 4.2 изображена эквивалентная схема датчика (здесь и ниже
применена программа для расчёта линейных электронных схем LES Алексея Смирнова). Она включает пару противофазных источников тока, которые генерируют ток пучка в линию датчика с задержкой равной времени
пролёта датчика пучком (здесь 1нс ). Интервал между импульсами на
выходе ou1 равен 2 (рис. 4.3). Если пучок находится в центре круговой
Рис. 4.3
камеры, а линия имеет азимутальный размер , то амплитуды импульсов
примерно равны
u I
u .
2 2
Если ток пучка описывать в терминах гармонических сигналов вида
exp(it ) , то амплитудная частотная характеристика датчика (рис. 4.4)
Рис. 4.4
имеет нули на частотах k (2 ) , как это видно из выражения
eit ei (t 2 ) eit ei ei ei 2eit ei 2 sin( ) .
32
В принципе, линия датчика может не иметь нагрузки на одном из своих
концов или быть закорочена. На рис. 4.5 схематически изображены датчики таких типов и их сигналы при различных способах съёма сигнала.
Такого типа датчики не обладают свойством направленности, которым
обладает согласованный с обеих сторон полосковый датчик в случае релятивистского пучка. Направленность датчика может быть существенна, ес-
Рис. 4.5
ли в накопителе циркулируют встречные пучки (например, электроны и
позитроны), так как сигналы от пучков частиц различных типов поступают
в разные каналы.
Полосковая конструкция используется также в качестве кикера (to kick
– ударять, лягать). Например, в системах возбуждения или подавления
поперечных бетатронных колебаний пучка. На накопителе ВЭПП-4М
(ИЯФ) работает система измерения частот бетатронных колебаний пучка и
система подавления когерентных бетатронных колебаний пучка на основе
полосковых датчиков и кикеров. Очевидно, что кикер также обладает
свойством направленности: сигнал в кикере действует только на тот (релятивистский) пучок, навстречу которому он распространяется.
Пуговичный датчик
Диск («пуговица»), центр которого присоединён к вакуумному вводу,
будем моделировать короткой линией длиной 30 мм (время пролёта
100 пс), центр которой нагружен на 50 Ом. Левый и правый генераторы
тока на рис. 4.6 моделируют пучок при пролёте им, соответственно, левого и правого зазоров между камерой и диском.
На рис. 4.7 – сигнал на входе in (длиной 20 пс) и сигнал на выходе out
(один положительный и один отрицательный импульсы). Такая красивая
картинка получается при волновом сопротивлении указанной линии
100 Ом. Заметим, что выходные импульсы разнесены по времени на время
33
Рис. 4.6
пролёта линии диска, а не на удвоенное время пролёта, как в случае полоскового датчика.
Рис. 4.7
На рис. 4.8 – сигналы при пучке прямоугольной формы длительностью
200 пс (т. е. вдвое больше времени пролёта). Длительность импульсов на
Рис. 4.8
выходе out соответствует длине диска, а интервал между ними – длительности пучка.
34
На рис. 4.9 сигналы соответствуют пучку длительностью 100 пс с
фронтами 100 пс. Выходной сигнал с затянутым хвостом, на который указывает стрелочка, получается при импедансе линии диска 50 Ом.
Рис. 4.9
Как видно, сигнал на выходе пуговичного датчика является разностью
двух сигналов тока пучка разнесённых во времени на время пролёта диска
(при правильном согласовании).
Способ нормировки и линейность координатной сетки
Очевидно, что зависимость от смещения пучка амплитуд сигналов датчиков, элементы которых однородны по оси Y (полосковые линии и т. п.), в
принципе не линейна. Это обстоятельство мало существенно для накопителей пучков, так как пучок почти не отклоняется от центра камеры. В тех
же случаях, когда предполагаются значительные смещения пучка, характеристики датчиков обычно табулируют и истинное положение пучка вычисляют по таблицам. Однако здесь кое-что можно получить аналитическим путём.
Разложение тонкого бесконечно длинного пучка ql (r ) с попереч
ным положением по азимутальным гармоникам ( – азимут пучка,
– азимут круга с радиусом ) имеет вид (ряд Фурье):
1 2 cosm( ) .
m 1
Пусть камера представляет собой цилиндр круглого сечения с радиусом R. Путём решения уравнения Пуассона можно найти явный вид азимутального распределения заряда изображения * () для тонкого пучка
ql (r ) внутри круговой цилиндрической камеры радиуса R. Однако,
учитывая приведённое выше разложение, почти очевидно, что в этом слу-
( )
ql
2
35
чае азимутальная плотность заряда изображения имеет вид (строгое доказательство дано в разд. 5):
q
m
* ( ) l 1 2
cos
m
(
)
.
m
2R
m 1 R
Полученный ряд легко суммируется (здесь для простоты R 1 ):
q
q
* ( ) l 1 2 m cosm( ) l 1 m eim( ) e im( )
2
2 m 1
m 1
ql
2
ei ( )
ei ( )
q
l
1
i ( )
i ( )
2
1 e
1 e
ql
2
ei ( ) ei ( ) 2 2
1
1 ei ( ) ei ( ) 2
2 cos( ) 2 2
q
1 2
.
l
1
2
2 1 2 cos( ) 2
1 2 cos( )
Координатная сетка датчика положения пучка
Пусть азимутальный размер электростатических (для определённости)
электродов мал и имеется смещение пучка только по оси X величиной x
(т. е. здесь 0 и cos x ). Тогда наведённые на электроды заряды зависят от азимута расположения электродов следующим образом:
1 x
1 x
1 x2
, q ( )
, q( 2) q( 2)
.
1 x
1 x
1 x2
Нормируем разность зарядов на противоположных электродах, расположенных в горизонтальной плоскости на их удвоенную сумму:
1 q(0) q( ) 1 (1 x) (1 x) (1 x) (1 x)
1
~
.
x
x
2 2 q(0) q( ) 2 (1 x) (1 x) (1 x) (1 x)
1 x2
Нормируем ту же разность на сумму зарядов на всех четырёх электродах (как это обычно принято):
q(0)
q(0) q( )
2x
1
1 x2
~x
.
x
q(0) q( ) q( 2) q( 2) 1 x 2 1 (1 x 2 ) (1 x 2 ) 2
1 x4
Казалось бы, второй способ нормировки немного лучше, как это видно
по расчётным кривым на рис. 4.10. Однако при одновременном смещении
по осям X и Z первый способ нормировки (на собственную сумму) даёт
1 2
1 2
,
,
q(0)
q
(
)
1 2 cos 2
1 2 cos 2
36
1 q(0) q( ) cos
x
z
~
, ~
,
x
z
2
2
2 2 q(0) q( ) 1
1
1 2
x2 z 2
~
, или ~
.
x2 ~
z2
2 2
(1 )
1 2
Как видно, при
способе нормировки
1
на собственную сумму
1 x2
имеет место только
x
1 x4
радиальное искажение
координатной сетки –
a( x)
вычисленный
пучок
b( x)
оказывается смещёнc( x)
1
ным вдоль радиуса
x
камеры. При этом ис1 x2
тинные
координаты
пучка (x, z) можно
0
определить аналити0
x
чески по измеренным
~
(x , ~
z ):
Рис. 4.10
~ 2 ~
x2 ~
z2,
1
1 1 4 ~ 2 2 ~ , x ~
x 1 2 R , z ~
z 1 2 R .
Рис. 4.11
Если же делать нормировку на полную сумму, то получим характерные
искажения координатной сетки (на рис. 4.11, слева – сетка по радиусу,
справа – сетка по углу).
37
Координатная сетка датчика квадрупольного момента пучка
Для измерения квадрупольного момента пучка необходимо 8 элементов
регистрации сигналов. Пусть они располагаются на азимутах 0, 4 ,
2 4 , 3 4 , 4 4 , 5 4 , 6 4 , 7 4 (соответствующие номера азимутов 0, 1, 2, 3, 4, 5, 6, 7).
Сигналы на азимутах 0, 2, 4, 6 пропорциональны следующим величинам:
J0
1 2
1 2
1 2
,
,
,
J
J
2
4
1 2 cos 2
1 2 sin 2
1 2 cos 2
1 2
.
1 2 sin 2
нормальную компоненту квадрупольного
J6
Рассчитаем
A x2 z 2 :
04 J 0 J 4 (1 2 )
2(1 2 )
,
(1 2 ) 2 4 2 cos2
26 J 2 J 6 (1 2 )
2(1 2 )
,
(1 2 ) 2 4 2 sin 2
A 04 26 2(1 4 )
4(1 4 )
4(1 4 )
2(1 2 ) 2 4 2 (cos 2 sin 2 )
((1 2 ) 2 4 2 cos2 )((1 2 ) 2 4 2 sin 2 )
1 4
((1 2 ) 2 4 2 cos2 )((1 2 )2 4 2 sin 2 )
A 04 26 2(1 4 )
момента
,
4 2 (cos 2 sin 2 )
((1 2 ) 2 4 2 cos2 )((1 2 ) 2 4 2 sin 2 )
2 2 cos 2
((1 2 ) 2 4 2 cos2 )((1 2 )2 4 2 sin 2 )
,
A
2 cos 2
. Здесь 2 cos2 2 cos2 sin 2 x 2 z 2 .
4
2 A
1
Сигналы на азимутах 1, 3, 5, 7 будут пропорциональны следующим величинам:
A
J1
1 2
1 2 (cos sin )
2
, J3
38
1 2
1 2 (cos sin ) 2
,
J5
1 2
1 2 (cos sin )
2
, J7
1 2
1 2( cos sin ) 2
.
Рассчитаем skew компоненту квадрупольного момента B 2 xz (skew –
косой, наклонный):
15 J1 J 5 (1 2 )
2(1 2 )
1
,
2(1 4 )
2 2
2
2
4
(1 ) 2 (cos sin )
1 2 2 sin 2
37 J 3 J 7 (1 2 )
2(1 2 )
1
,
2(1 4 )
2 2
2
2
4
(1 ) 2 (cos sin )
1 2 2 sin 2
B 15 37 2(1 4 )
2(1 4 )
,
(1 4 ) 2 4 4 sin 2 2
B 15 37 2(1 4 )
4 2 sin 2
,
(1 4 ) 2 4 4 sin 2 2
B
2 sin 2
. Здесь 2 sin 2 2 2sin cos 2xz .
2 B
1 4
~ 2 не зависит от , т. е. в слуЗаметим, что A2 B 2 2 1 4
чае вычисления квадрупольного момента при нормировке на собственную
сумму имеют место искажения координатной сетки подобные тем, что и в
случае вычисления дипольного момента (т. е. смещения пучка).
Решая квадратное уравнение, получим неискажённое значение
2 1 1 4 ~ 4 2 ~ 2 .
B
39
5. Датчики тока изображения
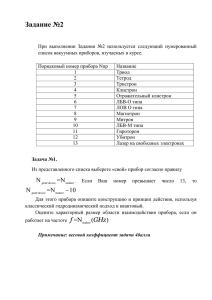
Теория датчика тока изображения для измерения положения пучка
Азимутальное распределение тока изображения, наводимого пучком в
проводящих стенках вакуумной камеры канала транспортировки, содержит информацию о токе пучка, положении его центра тяжести (дипольный
момент) и о высших моментах поперечного сечения пучка. На рис. 5.1
изображено примерное распределение тока изображения при смещении
Z
u1
X
u2
Рис. 5.1
пучка и метод его регистрации. В англоязычных работах датчики такого
типа обычно называются Wall Current Monitor. Традиционно они применяются для измерения величины тока и амплитудно-временной структуры
пучка. Предпринимались и предпринимаются попытки определять по току
изображения положение пучка.
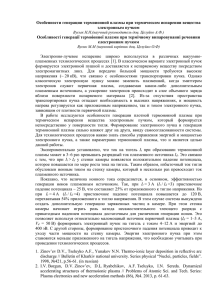
Чтобы
измерить
азимутальное распределение тока изображения, следует тем или
иным способом включить нагрузки в разрыв
вакуумной
камеры.
Присутствие же внесённого сопротивления
приводит к растека50 нс / дел
нию тока изображения
– спустя некоторое
время после пролёта
Рис. 5.2
40
фронта импульсного тока пучка ток изображения распределяется равномерно по азимуту камеры и информация о положении пучка пропадает. На
рис. 5.2 изображены эпюры сигналов с одного из выходов датчика тока
изображения (ДТИ) при различных смещениях ступенчатого «пучка»
(роль пучка играет импульс тока в проводе, натянутом внутри ДТИ вдоль
его оси). Видно, что растекание имеет не экспоненциальный характер и
что величина постоянной времени растекания зависит от смещения пучка.
Очевидно, чтобы построить ДТИ для измерения положения пучка, необходимо определить характер эволюции азимутального распределения тока
изображения.
Задача разработки «прозрачного» датчика положения и заряда одиночного сгруппированного наносекундного пучка в канале транспортировки
пучков из накопителя ВЭПП-3 в накопитель ВЭПП-4М (ИЯФ) возникла в
связи с необходимостью заменить использовавшиеся в качестве датчиков
положения центра тяжести пучка не вполне «прозрачные» вторичноэмиссионные датчики [4]. Значительное количество последних (более 10)
приводило к заметным потерям тока пучка и увеличению его фазового
объёма. Кроме того, помимо положения пучка, полезно знать его полный
заряд в той или иной части канала транспортировки для определения эффективности проводки пучка по каналу.
Канал между накопителями ВЭПП-3 и ВЭПП-4М предназначен для
транспортировки пучков электронов и позитронов с энергией 1.8 ГэВ
( 3600 ). Протяжённость трассы около 75 м. Пучки представляют собой
однократные импульсы тока длительностью около 1 нс. Число частиц в
пучке до 2.4 1011 . Частота циклов инжекции пучков в канал невелика –
(0.01 0.001) Гц, поэтому дорога каждая инжекция.
В случае короткого однопролётного пучка электростатический датчик
положения плох из-за больших размеров, несогласованности и как следствие недостаточной широкополосности. Пуговичный датчик является
дифференцирующим и поэтому непригодным для измерения заряда пучка.
Согласованный полосковый датчик должен иметь приличную длину и несколько вакуумных вводов. Наиболее подходящим для решения поставленной задачи по электрическим и технологическим соображениям является датчик тока изображения.
Азимутальное распределение тока изображения в стенках
идеально проводящей круглой цилиндрической камеры канала
Практически всегда есть возможность иметь сечение камеры канала
круглым в области датчика. В этом случае решение задачи об азимутальном распределении тока изображения наиболее просто и наглядно.
41
Пусть вакуумная камера, вдоль оси Y которой движется пучок заряженных частиц, представляет собой идеально проводящий цилиндр с радиусом R1 1 . Ток изображения, наводимый пучком в стенках камеры,
определяется векторным потенциалом A( x, y, z, t ) , создаваемым током
пучка j ( x, y, z, t ) :
1 2
(5.1)
A 2 2 A 0 j .
c t
Здесь 1 , 1 . В цилиндрических координатах (r ,, y) уравнение
(5.1) приобретает вид
1 1 2 2 1 2
(5.2)
A
A
A
j.
r A 2
0
r r r r 2
y 2
c 2 t 2
Пусть ток пучка имеет только Y-компоненту j y j (r,, y, t ) и пусть
его зависимость от ( y,t ) имеет вид гармоники exp(it iky) (ниже этот
множитель опущен). Коль скоро граничные условия ( A 0 при r 1 ) однородны по Y, вынужденное решение уравнения (5.2) имеет только компоненту Y векторного потенциала. Вынужденное решение Ay A(r , )
ищется в виде разложения Фурье в ряд по азимуту :
A(r , ) A0 (r )
{A (r) cos(m) A (r) sin(m)} .
c
m
s
m
(5.3)
m 1
Все эти A0 (r ) , Amc (r ) , Ams (r ) в выражении (5.3) удовлетворяют следующему уравнению:
2
1 d d
2
m
(5.4)
Am 2 Am k 2 Am 2 Am 0 jm .
r
r dr dr
c
r
Здесь jm (r ) – коэффициенты разложения j (r , ) в ряд Фурье по азимуту
. Введём параметр 2 k 2 2 c 2 k 2 1 v 2 c 2 k 2 2 (здесь v
– скорость движения пучка, – релятивистский фактор). Уравнение (5.4)
сводится к неоднородному уравнению Бесселя:
1
m2
(5.5)
Am (r ) Am (r ) 2 2 Am (r ) 0 jm (r ) .
r
r
Известно частное решение уравнения (5.5) с однородными граничными условиями Am (r ) 0
J m (mk r )
k 1
2
2mk
amk . Здесь mk – корни уравнения
42
J m (r ) 0 , а amk – коэффициенты разложения
Бесселя:
amk
jm (r ) в ряд Фурье–
1
2
J m2 1 (mk )
J
m (mk ) jm ( )d
.
0
Подстановка amk с использованием известных соотношений для функций
Бесселя даёт
Am (r ) 0
2
1
J m ( )
jm ( )d .
m ( )
J
{J m ( ) N m (r ) J m (r ) N m ( )}
0
(5.6)
Здесь J m , N m – функции Бесселя и Неймана соответственно. Магнитное
поле
B {Br , B , B y } rotA A
Ay , Ay
Ar ,
Ar
A .
y
r
r
y
r
r
Здесь Ar A 0 , а Ay ( ) exp(im ) . Таким образом, вблизи стенок камеры не равно нулю только B :
im
Ay
Ay
0 , B
Ay .
r 1
r
r
r
Дифференцирование выражения (5.6) по r, с учётом известного соотношения для функций Бесселя J ( z ) N ( z) J ( z) N ( z) 2 (z) (здесь z –
параметр), даёт
Br
jm*
1
0
1
B
r 1
J m ( )
jm ( )d .
m ( )
J
0
Заменив, наконец, функции Бесселя мнимого аргумента (так как
2
k 2 2 ) на модифицированные функции Бесселя согласно соотношению I m ( x) exp( im 2) J m (ix) , получим действительное выражение
1
jm*
I m
I j
0
m ( )d
.
m
Итак, искомое выражение для азимутальной плотности тока изображения в общем случае имеет вид
2 1
I m
1
I 0
j * ( )
2
cos[m( )] j ( , )dd . (5.7)
2
I
I
m1 m
0 0 0
Напомним, что это амплитуда гармоники exp(it iky) тока пучка.
Если же пучок представлен точечным зарядом, движущимся по оси каме-
43
ры, выражение (5.7) приобретает вид j * ( ) 1 I 0 . Этот результат был
использован выше в разд. 1 для расчёта предела пространственного и временного разрешения электромагнитных датчиков.
Здесь и ниже из соображений удобства принято что
1
2
2 1
2
j ( , )dd
0 0
j ( )d 1 .
*
0
Основной интерес представляет асимптотика выражения (5.7) при
| | 1 . Это условие имеется либо в случае пучка, продольный размер которого много больше апертуры камеры ( k 1 ), либо оно удовлетворяется
в силу релятивизма пучка ( 1 ). В нашем случае k 0.5 , 3600 . Принимая во внимание соответствующую асимптотику функций Бесселя, получаем
2 1
1
*
m
j ( )
(5.8)
1 2 cos[m( )] j ( , )dd .
2
m 1
0 0
Для тонкого пучка, имеющего поперечные координаты ( , ), выражение
(5.8) приобретает следующий вид:
1
j * ( )
1
2
m cos[m( )] .
(5.9)
2
m 1
В результате суммирования ряда (5.9) получается следующее выражение:
j* ( )
1
1 2
.
2 1 2 cos( ) 2
(5.10)
Параметры пучка, определяемые по току изображения
cos(m )
Проинтегрируем выражение (5.8) с весами
, применяя изме sin(m )
нение порядка интегрирования:
2
I mc
cos(m )
*
s j ( )
d
I m 0
sin(m )
В частности,
2 1
0 0
m cos(m )
m cos(m )
j ( , )dd
.
sin(
m
)
sin(m )
c
c
x 2 z 2
cos( )
I1
x
I 2
2 cos(2 )
s
, s
2 xz
sin(2 )
sin( )
z
I 2
I1
44
. (5.11)
Интегралы { I1c , I1s } дают значения координат центра тяжести. В интегралах { I mc , I ms } ( m 1 ) содержатся значения высших моментов поперечного сечения пучка.
При наличии некоторой дополнительной информации относительно
геометрии поперечного сечения пучка можно судить о его поперечных
размерах.
Так, если известно, что плотность пучка в поперечном сечении распределена нормально в некоторых координатах ( X Z – собственные координаты), т. е.
1
( x) 2
( z ) 2
,
j ( x, z )
exp
exp
2
2
2 x z
2 z
2 x
а в координатах (XZ) пучок смещён на ( x, z ) и повёрнут на угол –
x x x cos( ) z sin( ),
z z x sin( ) z cos( )
– тогда, согласно выражению (5.10),
I c ( x 2 z 2 ) j ( x, z )dxdz x 2 z 2 ( 2 2 ) cos(2 ),
2
x
z
c
I1 x,
S
s
I 2s 2 xzj ( x, z )dxdz 2xz ( x2 z2 ) sin(2 ).
I1 z,
S
Здесь S – область, занимаемая пучком в поперечном сечении.
Введём следующие параметры:
A I 2c ( I1c ) 2 ( I1s ) 2 ( x2 z2 ) cos(2 ),
B I 2s 2I1c I1s ( x2 z2 ) sin(2 )
– компоненты «собственного» квадрупольного момента пучка. Тогда
a
са
4
A2 B 2
x2 z2 – половина расстояния между фокусами эллип-
среднеквадратичных
поперечных
размеров
пучка,
а
arctanB A 2 sign(B)[1 sign( A)] / 4 – угол поворота этого эллипса.
Аналогично можно показать, что если поперечное сечение пучка имеет
вид отрезка длиной 2d, параметр a d 3 , а для пучка, который состоит
из двух тонких равной интенсивности пучков с расстоянием между ними
2d, параметр a d . В любом случае параметр a является оценкой снизу
поперечных размеров пучка.
45
Замена интегралов суммами
Интегралы I1c , I1s , I 2c , I 2s и т. д. в принципе можно реализовать,
например, в случае электростатического датчика с помощью должным
образом вырезанных электродов. Между тем можно вообще отказаться от
сложной конфигурации электродов (в случае электростатического датчика) и одновременно решить проблему линейности и попутно широкополосности для датчиков других типов.
Равномерно по азимуту (круглой камеры) размещается конечное число
n одинаковых элементов датчика. В случае ДТИ этими элементами являются азимутальные сегменты стенок камеры – линии распространения тока изображения, ток в которых ik ( k 1, … , n) и регистрируется.
Рассчитаем ток в k-м сегменте, воспользовавшись выражением (5.9) для
тока изображения в случае единичного тонкого пучка с поперечными координатами ( , ):
k n
ik
1
sin(l n)
1
2
l cos[l (k )]
.
n
l n
l 1
j * ( )d
k n
Введём «коэффициент фильтрации» азимутальной гармоники
sin(m n)
M n, m
. Теперь для вычисления мультипольных моментов вмеm n
сто интегрирования применим суммирование:
2
n
S0
ik
k 1
Smc
1
s
Sm M n, m
1 2
M n, m n
j ( )d I
*
cos(mk )
1 2
ik
sin(mk ) M n, m n
k 1
n
M
n, l
l 1
1
M n, m
M n, l l
l 1
n
cos(mk )
sin(m ) cos[l(
k
k 1
)]
k
sin(m ) {cos(l ) cos(l ) sin(l ) sin(l )}
k
k 1
1 ,
cos(mk )
n
l
0
0
M
n, l
l 1
l cos(l )
{ l , m l , pn m }
p 1,...
sin(l )
cos(m )
1
m
sin(m ) M n, m
c
1
I
ms
I m
M n, m
k
k
M
n, pn m
p 1
M
n, pn m
p 1
46
pn m cos[( pn m) ]
sin[( pn m) ]
pn m cos[( pn m) ]
.
sin[( pn m) ]
Итак, следующее соотношение является точной оценкой ошибки, обязанной искажению координатной сетки вследствие замены интегралов
суммами:
S mc I mc
1
s s
S m I m M n, m
1
M n, m
M
pn m cos[( pn m) ]
p 1
p 1
n , pn m
pn m
sin[( pn m) ]
1 nm nm
M n, m
1 n
(5.12)
В табл. 5.1 приведены максимальные ошибки согласно оценке (5.12),
при смещении пучка на треть электрического радиуса датчика ( R1 3 ).
Как видно, линейность ДТИ заТаблица 5.1
метно улучшается при переходе от
Максимальные
ошибки
четырёх к восьми линиям распространения тока изображения. При
n
m1
m2
этом погрешность определения сме4
0.041
щения пучка при
R1 27 мм ,
8
0.00051
0.0014
R1 3 и n 8 около 0.014 мм.
16 0.000000077 0.00000021
Что касается определения величины квадрупольного момента, следует иметь в виду квадратичную зависимость его величины от параметра a пучка (см. выше). При R1 27 мм ,
R1 3 и n 8 погрешность определения параметра a будет около 1 мм
( 27 мм 0.0014 1мм ).
Многоэлектродный датчик в принципе может быть электростатическим, полосковым, токовым или магнитоиндукционным. При этом благодаря малым азимутальным размерам элементов датчика достигается максимально возможная широкополосность, а благодаря азимутальной симметрии датчика, упрощается его изготовление при обеспечении хорошего
электрического нуля датчика (лучше 0.1мм ) и идентичности параметров
датчиков.
Оценка времени растекания тока изображения
Пусть ток пучка имеет вид гармоники с круговой частотой . При
объёмной проводимости материала камеры толщина скин-слоя рассчитывается известным образом (система единиц СИ):
2 0 .
47
(5.13)
Грубо говоря, ток изображения сосредоточен в пределах скин-слоя.
Сопротивление этого скин-слоя на единицу длины круглой камеры с внутренним радиусом R имеет следующую величину:
(5.14)
rl 1 2R .
Если при этом толщина скин-слоя R , то граничные условия и, следовательно, форма азимутального распределения тока изображения имеет
тот же вид, что и в случае идеально проводящих стенок камеры. Исключая
виртуальную проводимость из соотношений (5.13) и (5.14), получаем
следующее соотношение:
rl 0 .
4 R
Условие R выполняется, если rl
0
. Или, иначе, 1 , где
4
0 10 7
4rl
rl
(5.15)
– искомая постоянная времени растекания.
Выше речь шла о сопротивлении «на единицу длины» камеры rl r l .
Между тем, элементы регистрации, очевидно, должны представлять собой
нечто сосредоточенное.
Проблема решается следующим образом. В стенках камеры делаются
продольные разрезы длиной l, электрически изолирующие линии распространения тока изображения. Фактически сосредоточенная нагрузка каждой линии оказывается распределённой по длине линии с точностью до
времени распространения сигнала по линии t l c .
Такой подход очевидно корректен, пока это время много меньше времени растекания:
l
0 или r 0 c 30Ом .
c 4rl
4
Последнее соотношение представляет собой ограничение на допустимую
величину вносимого сопротивления.
У ДТИ первого поколения (1975) вносимое сопротивление было около
0.03 Ом ( 50 102 16 0.03125 ), рабочая длина датчика 50 мм и апертура
100 мм. Время растекания оказалось равным 150 нс. Согласно же оценке
(5.15) время растекания в этом случае должно иметь величину около
160 нс. Таким образом, модель длинного датчика работает, даже если рабочая длина датчика по величине сравнима с его апертурой.
48
Точное решение задачи о растекании тока изображения
в рамках модели длинного датчика
Пусть камера представляет собой тонкостенный цилиндр с радиусом
R1 1 и поверхностной проводимостью 1 (2rl ) . Снаружи аксиально
этой камере имеется проводящий экран с радиусом R2 R . Пучок распространяется внутри камеры (область 1) вдоль её оси Y. Граничные условия
однородны по Y, так что векторный потенциал, создаваемый током пучка,
и ток изображения будут иметь только Y-компоненту. Опуская выкладки,
приходим к уравнению в терминах амплитуд азимутальных гармоник:
1
m2
(5.16)
Am (r ) Am (r ) 2 2 Am (r ) 0 jm (r ) .
r
r
Теперь граничные условия неоднородны по радиусу r. Известно, что
решение неоднородного уравнения (5.16) с неоднородными граничными
условиями является суммой общего решения соответствующего однородного уравнения Бесселя с неоднородными граничными условиями (свободное решение) и частного решения неоднородного уравнения с одно~
родными граничными условиями (вынужденное решение A ):
~
– область (1);
Am(1) C1J m (r ) Am (r )
Am(2) C2 Nm (r ) C3 J m (r ) – область (2).
Здесь J m , N m – функции Бесселя и Неймана, соответственно (решения
однородного уравнения Бесселя).
Коэффициенты C1 , C 2 , C3 определяются граничными условиями
~
Am 0
при r R1 1 , Am( 2) 0 при r R2 R .
Am( 2) Am(1) 0
1 d ( 2)
A Am(1) i Am(1) 0
0 dr m
Непрерывность векторного потенциала ( Am(2) Am(1) 0 ) и последнее
соотношение следует из
Adl rotAds Bds 0 .
1 d
L
S
S
Am( 2) Am(1) i Am(1) 0 следует из
0 dr
1
rotH j
B j y E y Ay i Ay , B
Ay .
0
t
r
Соотношение
49
Решение системы уравнений для коэффициентов C1 , C 2 , C3 даёт
1
~
J m ( ) J m ( ) N m (R) N m ( ) J m (R)
Am
A1
.
r 1 0 i 0 J m ( ) J m ( ) N m (R) N m ( ) J m (R)
t
С точки зрения задачи о растекании тока изображения, интерес представляет то новое в распределении j * ( ) , что обусловлено конечной проводимостью стенок камеры. Введём «коэффициент передачи» m-й азиму*
тальной гармоники следующим образом: Km jm
( ) jm* ( ) . Тогда
jm*
Km
1
.
1 1 (i m )
(5.17)
Здесь m (R) – постоянные времени растекания. При 1
1
R 2 m 1
1 2 m .
R 1
Из выражения (5.17) видно, что растекание имеет «индуктивный» характер – это функция передачи тока генератора тока в сопротивление шунтированное индуктивностью. Более того, полная индуктивность растекания Lm m r есть результат параллельного соединения «внутренней» (1)
и «внешней» (2) индуктивностей растекания:
L(02) l 0 ln( R ),
L(01) ,
2
1 0
(1)
0 R 2m 1
1
L
l
,
(
2
)
m
L
l
.
m 2
m
m 2 R 2 m 1
1 0
При R L(m1) L(m2) и, следовательно, m
. Последнее выраm 4rl
жение при m 1 в точности совпадает с оценкой (5.15), полученной выше
с помощью модели виртуального скин-слоя. Влияние на величину постоянной времени растекания «внешней» индуктивности растекания можно
сделать достаточно малым, поместив в область (2) ферритовые кольца
(о поведении феррита на высоких частотах см. в разд. 7).
В силу индуктивного характера растекания, наличие собственной индуктивности у линии распространения тока изображения приводит лишь к
некоторому увеличению постоянных времени растекания. В той же степени электрический радиус ДТИ увеличивается по сравнению с его геометрическим радиусом ( R1 1 ). Если L – собственная индуктивность плюс
индуктивность нагрузки каждой из n линий распространения тока изобра-
0 ( R)
1 0
0
ln( R) , m ( R )
m 2rl
2rl
50
жения, то электрический радиус ДТИ определяется следующим соотноше R
L
нием:
l 0 ln e .
n
2 R1
Практический эффект растекания тока изображения
Пусть пучок имеет форму ступеньки, т. е. j y (r,) h(t y v) . Выражение (5.16) для K m ( ) указывает на следующий вид зависимости от
времени амплитуды m-й азимутальной гармоники тока изображения (при
*
фиксированном значении y, здесь – при y 0 ): jm
(t ) exp t m . Соответственно выражение (5.9) для азимутальной плотности тока изображения при тонком единичном пучке приобретает вид
1
j * ( , t )
exp
t
2
m exp t m cos[m( )]h(t y v) . (5.18)
0
2
m 1
Как видно из выражения (5.18), отмеченный выше не экспоненциальное затухание сигнала тока изображения обусловлен тем, что здесь имеются все азимутальные гармоники, каждая из которых имеет свою постоянную времени растекания.
Если 0 m , то можно пренебречь отличием члена exp( t 0 ) от еди-
ницы. Если при этом R2 R R1 1 (или если «внешняя» индуктивность
растекания много больше «внутренней»), то m
m
1 0
1
m 4rl m
(или
1 0
1
2 ). В этом случае выражение (5.18) суммируется и приm 2rl m
обретает вид (здесь, для определённости, принято 1 ):
j* ( , t )
1
1 2 exp 2t
h(t y v) .
2 1 2 exp t cos( ) 2 exp 2 t
Здесь имеет место подобие: распределение j * ( ) , зарегистрированное
спустя время t после прохождения фронта ступенчатого пучка, имеет тот
же вид, что и распределение на фронте пучка с радиальным смещением
exp( t ) . В этом случае при вычислении поперечных параметров
пучка растекание может быть учтено заменой значения электрического
радиуса ДТИ Re на Re exp( t ) .
51
На рис. 5.3 изображена эволюция азимутальных плотностей тока изображения на разных азимутах при токе пучка имеющем форму ступеньки,
рассчитанная согласно следующему выражению ( 1 , x 1 , z 0 ):
1 exp 2t
j * (k , t )
h(t ) .
1 2 exp t cos(k ) exp 2t
3
16 0
1 18
Q0 ( t )
3
4
7
8
Q1 ( t )
Q2 ( t )
5
8
1
2
3
8
1
4
1
8
Z
X
0
x 1 2
Q3 ( t )
Q4 ( t )
2 14
Q5 ( t )
3 83
Q6 ( t )
1
Q7 ( t )
8
Q8 ( t )
x 1 3
t
0
0
t
3
Рис. 5.3
Если же пучок имеет форму короткого импульса длительностью t, то
растекание проявляет себя так, как это изображено на рис. 5.4 (импульс
прямоугольной формы, 1 , x 1 3 , z 0 ).
Предметом измерения может быть средняя амплитуда импульса или
его заряд. В последнем случае следует отсечь «хвост», знак которого совпадает со знаком импульса (см. рис. 5.4, справа), имеющий уровень
t
2x
(в приближении exp t 1 t ). При измерении заряда
(1 x) 2
импульса выше этого уровня отношение максимальной амплитуды сигнала
к амплитуде «хвоста» (динамический диапазон), составит
1 x 1 x 2
5.3 .
t 1 x
2x x 1 3
t
Амплитуда «хвоста» может быть уменьшена, если исходный импульс
преобразовать в пару противофазных импульсов следующих друг за другом (об этом см. в разд. 9).
DR ( x)
52
На рис. 5.5 (слева) – смещение пучка 1 3 , справа – 1 3 , время растекания 1 , длительность импульса t 0.1 . У левого сигнала имеется по2
1 x
1 x
x
1
3
2
(1 x)
1
(1 x)
p ( t)
1
s ( t)
1 x
1 x
t
t
2x
(1 x) 2
0
0
0.25
t
0
0.5
0.25
0.5
1.5
t
t
0
1.5
t
Рис. 5.4
ложительный выброс порядка 0.02, у правого – отрицательный выброс
порядка 0.002. В общем виде амплитуда «хвоста» (в приближении
2
1 x
t
.
exp t 1 t ) равна AT 2 x
1 x 3
2.5
2.5
0.6
0.6
0.5
2
0.4
1.5
1
1
p( t )
q( t )
1
0.3
0.2
0.5
s( t )
0
0
q( t )
0.5
0.1
0
0
0.1
0.2
1
0.3
1.5
0.4
2
2.5
2.5
0.5
0.6
0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
t
0.6
0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.1
0.9
t
0.9
Рис. 5.5
Более точная аналитика здесь излишня, так как проще сделать численный расчёт.
53
Датчики тока изображения на канале транспортировки пучков
из накопителя ВЭПП-3 в накопитель ВЭПП-4М
На рис. 5.6 изображён эскиз конструкции ДТИ третьего поколения
(ИЯФ). Датчик имеет 8 линий распространения тока изображения, распо-
Рис. 5.6
ложенных в разрыве вакуумной камеры (на рис. 5.6 – область изолирующей вакуум керамики). Длина линий 53 мм. Линии расположены равномерно по азимуту камеры с зазорами 2 мм. Нагрузками линий являются
первичные обмотки трансформаторов 1 : 20 на ферритовых кольцах
( 7 4 2 мм , 1000 ). Вторичные обмотки трансформаторов нагружены
на диоды и далее на согласованные (для высоких частот) отрезки коаксиальных кабелей РК–50–1.5–12 (длина 1 м). Выпрямленные напряжения
измеряются многоканальным регистрирующим устройством. Полученные
данные передаются в ЭВМ для дальнейшей обработки.
В нашем случае осуществляется детектирование заряда короткого импульса. При этом необходимо, чтобы «хвост» тока изображения на входе
детектора отсекался – не тёк в нагрузку детектора. Это происходит за счёт
утечки части тока в шунтирующее сопротивление ферритового кольца
Rs 5кОм (о шунтирующем сопротивлении см. в разд. 7).
54
Датчики тока изображения на каналах БЭП–ВЭПП-2000
На каналах БЭП–ВЭПП-2000 (ИЯФ) установлено 8 ДТИ четвёртого
поколения (рис. 5.7).
Датчик имеет 4 линии распространения тока изображения на азимутах
1 4 , 2 3 4 , 3 3 4 , 4 4 . В принципе, азиму-
2
1
30
Z
37
47
X
3
4
Рис. 5.7
тальный угол установки датчика может быть любым. При расчёте положения пучка по осям (X, Z) достаточно сделать соответствующее преобразование координат. Токи, текущие по линиям через трансформаторы тока на
ферритовых кольцах поступают по согласованным кабелям на входы пикап-станции (ПС).
На рис. 5.8 изображена структура аналоговой части одного канала ПС.
M 15
91
к10
6дБ
K 1 .5
AD603
11
AD8009
91
ФНЧ
49.9 E
к 30
к 62 *
10 10
500 мВ 400 мВ, шаг _ 150 мВ
10
11
10
Рис. 5.8
55
н10
2н0
н10
М 15
AD8009
54 мкГн // 5к
к51
(30,24,18,12,6,0,6dB)
2н0
КД914А
Rш 500
Здесь применён формирователь на отрезках линий с длинами по 1 м
(время распространения 5 нс), который разбивает исходный импульс на
два противофазных половинной амплитуды. Благодаря этому решается
рассмотренная выше проблема «хвоста» и не требуется программного переключения режимов электроны / позитроны. Формирователь является
фильтром постоянного импеданса (см. разд. 9). Кроме того, формирователь является фильтром ВЧ не искажающим формы исходного импульса.
Вычитание пары продетектированных сигналов производится после их
оцифровки. И то и другое служит помехоустойчивости.
Широкополосный датчик тока пучка
На рис. 5.9 изображёна часть поперечного разреза широкополосного
датчика тока пучка (ИЯФ).
210 мм
кольцо К180х110х20, М200
135 мм
разъём СР -50-73ПВ
3.5мм
97 мм
керамика
50
3.5
3.125 120
3.111
16
135
96 мм
86 мм
94.5
Рис. 5.9
Радиальная линия распространения сигнала тока изображения от
внутренней поверхности камеры канала до нагрузок согласована, что поз56
воляет иметь максимально возможную полосу. Число нагрузок достаточно
велико – 16 штук, поскольку полоса датчика существенно зависит от азимутального расстояния между этими нагрузками. В четырёх точках азимута датчика (чтобы исключить возможную зависимость формы сигнала от
смещения пучка) к разъёмам подключено 4 коаксиальных кабеля, нагруженных на пассивный сумматор. Другие выходы датчика нагружены на
корректно упакованные в разъёмы резисторы 50 Ом.
Чтобы изолирующая вакуум керамика с диэлектрической проницаемостью 10 также работала как согласованная линия её продольный размер должен быть около 7.5 мм. В данной конкретной конструкции в силу
требований технологии длина керамики больше оптимальной.
Электроны, оседающие на внутренней поверхности керамики датчика,
могут вызвать электрический разряд, который может разрушить керамику.
С целью предотвратить накопление электронов на керамике на её поверхность нанесён тонкий слой нержавеющей стали. Слой имеет шунтирующее
сопротивление не менее 100 Ом и потери тока изображения незначительны
(менее 3 %).
На рис. 5.10 изображены амплитудные частотные характеристики двух
датчиков и схема их измерения.
"Input"/"0dB level"
dB
-15
-20
-24.4dB (3V/A)
+3dB
-25
-3dB
-30
-35
-40
0.65
1.30
Output
1.95
2.60
Spectrum Analyzer
3.25
Input
3.90
4.45
5.20
5.85
GHz
20 lg(1 16) 24.1dB
MS2623B
Monitor under test
0dB level
50 Ohm
Рис. 5.10
На рис. 5.11 изображены осциллограммы сигналов тока пучка полученные с двух датчиков в KAERI (Институт атомной энергии, Республика
Корея) с помощью цифрового осциллографа Tektronix с полосой 40 ГГц.
57
Более длинный импульс соответствует пучку на влёте в группирующий
пучок резонатор, более короткий – пучку после резонатора.
Звон 3.3ГГц
BWBM2
BWBM1
Фронт 200пс
Фронт 600пс
Длительность 1.4нс
Длительность 450пс
Рис. 5.11
Длительность фронта сигнала тока сгруппированного пучка – около
200 пс – соответствует полосе около 1.5 ГГц, которая определяется затуханием в кабеле длиной порядка 30 м.
58
6. Измерение параметров несгруппированного пучка
Датчик постоянного тока пучка
На заре развития ускорительной техники для измерения постоянного
тока пучка применялся (и применяется до сих пор) так называемый цилиндр Фарадея – Faraday Cup [4]. Это такая изолированная от земли чашка,
в которую направляется пучок. Чашка устроена достаточно сложно, чтобы
частицы пучка, влетающие в чашку, уже не могли покинуть её. Ток, стекающий с цилиндра Фарадея на землю, очевидно равен току пучка. Однако
пучок при этом гибнет.
Для «неразрушающей» регистрации постоянной составляющей тока
пучка применяются так называемые трансформаторы постоянного тока
(DCCT – Direct Current Current Transformer). Они незаменимы в том случае, когда ускоряющее напряжение отсутствует и пучок циркулирует в
накопителе, равномерно заполняя его периметр. Пучки могут циркулировать очень долго (дни и месяцы). Чтобы определить, например, в этих случаях постоянную времени жизни пучка за разумное время, значительно
меньшее времени жизни, требуется очень точно измерять абсолютную
величину тока пучка.
В трансформаторах постоянного тока используются магнитные сердечники с выраженH
IH
ным
эффектом
насыщения
–
B
кольца из пермалB
t
лоя. На рис. 6.1
изображён эффект
насыщения. ГарРис. 6.1
моническое опорное напряжение с определённой частотой, амплитуда которого пропорциональна производной магнитного поля В(t), вызывает ток в обмотке, величина
которого
IH
пропорциональна
H
H
I
B
B
индукции
Н(t).
B
Если к индукции
Н(t), создаваемой
B
t
этим током, добавить постоянную
индукцию, создаРис. 6.2
ваемую
током
пучка, то в токе обмотки появится сигнал второй гармоники опорного сигнала (рис. 6.2).
59
На рис. 6.3 изображена блок-схема датчика постоянного тока пучка.
Сигнал второй гармоники опорного сигнала детектируется синхронным
Пучок
А
Синхронный
детектор
u
sin(t )
sin( 2t )
Рис. 6.3
детектором, продетектированное напряжение усиливается и соответствующий ток создаётся в дополнительной обмотке, общей для пары встречно
замагничиваемых опорным сигналом сердечников. Этот ток компенсирует
ток пучка благодаря системе обратной связи и, таким образом, равен току
пучка по величине.
Точность определения тока пучка с помощью датчика постоянного тока
ограничивается дрейфом нуля на уровне порядка 1 мкА тока пучка.
Измерение параметров пучка по его шумам.
Продольные сигналы пучка
Для наблюдения сигналов с датчиков пригодны два типа приборов –
осциллограф (временная область) и анализатор спектра (частотная область).
Пусть для регистрации продольных сигналов пучка используется широкополосный датчик тока. Пусть только одна частица с зарядом е циркулирует в накопителе. Всякий раз, когда она минует датчик (т. е. через период обращения), на выходе датчика появляется короткий импульс. Таким
образом, сигнал, наводимый одной частицей, имеет вид последовательности коротких импульсов (на экране осциллографа). Спектр такого сигнала
представлен постоянной составляющей и гармониками частоты обращения
( 2f ):
i (t ) ef 1 2 cos(nt ) .
n 1
60
Если добавить сюда ещё одну частицу, орбитальные параметры которой не зависят от орбитальных параметров первой частицы, с несколько
иной энергией и, следовательно, согласно известным соотношениям, с
df
dp
1
E
другой частотой обращения:
, 2 , где
, а
f
p
E
0
ln R p dR
– ко
df
2df
3df
4df
ln p R dp
2ef
эффициент расширения
ef
орбит, то спектр сигнала
будет выглядеть так, как
Рис. 6.4
это
изображено
на
рис. 6.4. Очевидно, что в
окрестности каждой из гармоник частоты обращения имеется столько
спектральных линий, сколько частиц в пучке. Суммарная амплитуда тока в
окрестности первой (для простоты) гармоники равна
N
I1 2ef
cost (t ) , (t)
k
k
k0
k t .
k 1
Здесь разница в частотах обращения частиц помещена в слабо зависящую
от времени фазу.
Средняя по ансамблю (тождественных накопителей) величина тока в
окрестности первой (и любой другой) гармоники, в силу произвольного
(по ансамблю) значения фазы k-й частицы, равна нулю:
N
I1 2ef
cost (t ) 0 .
k
k 1
Измерение тока и разброса энергии
Средний (по ансамблю) нормированный квадрат тока в окрестности
первой (и любой другой) гармоники равен
I12
N
ef 2
N
N
cost (t ) cost (t )
4
k
l
k 1 l 1
N
cos2t (t ) (t ) cos (t ) (t )
2
k
l
k
l
k 1 l 1
N
N
2
N
N
cos k (t ) l (t ) 2
k 1 l 1
k 1 l 1
61
N
1 2N .
kl 2
k 1
Итак, полный ток пучка из N частиц, случайным образом расположенных по периметру накопителя, и полная мощность тока в окрестности n-й
гармоники частоты обращения пучка имеют следующий вид:
N
I
i
k
, I efN , I n 0 , I n2 2(ef ) 2 N .
k 1
Зная полную мощность тока в окрестности какой-либо гармоники, количество частиц пучка и его средний ток можно определить расчётным путём:
N
I n2
, I
I n2
.
2ef
2(ef ) 2
Умножение отфильтрованного сигнала подходящей гармоники самого
на себя можно сделать либо с помощью детектора, имеющего квадратичную характеристику, либо с помощью специального перемножителя
(например, AD825). Усреднение по ансамблю подменяется усреднением
по времени и осуществляется с помощью фильтра нижних частот (замена
усреднения по ансамблю усреднением по времени законно для стационарных процессов – так называемая «эргодическая гипотеза»). Желательно,
чтобы время усреднения было много больше характерного времени развития флуктуаций 1 f ( 2f – разброс частот обращения).
Полная
мощность
тока
n-той
гармоники
не
2
I
f
зависит от номера гармоники, так как каждая
из частиц пучка имеет
свою линию в окрестноf
2f
3f
4f
сти каждой из гармоник
частоты
обращения.
Рис. 6.5
Увидеть эти линии как
отдельные можно было
бы, в принципе, с помощью идеального анализатора спектра. В полосе
наблюдения реального анализатора f этих линий будет много. Амплитуда результирующего «интегрального» сигнала и отображается на экране
анализатора (здесь – в окрестности первой гармоники):
dN
u ( f ) I12
2(ef ) 2
f .
, I12
f
f
df
Если полоса наблюдения анализатора существенно меньше разброса
частот обращения частиц пучка, то можно видеть, что ширина наблюдаемых спектральных линий возрастает с номером гармоники, а амплитуда
падает (на рис. 6.5 изображён квадрат амплитуды). Из такой картинки
62
можно извлечь информацию о средней частоте обращения пучка и о распределении частиц по частотам обращения и, следовательно, по энергии.
В ИЯФ проводились исследования шумов однородного пучка протонов
на накопителе НАП-М, который (пучок) подвергался электронному охлаждению. Измерение спектра шумов пучка проводилось на 8-й гармонике
частоты обращения при помощи электростатического датчика. На базе
этого датчика был образован резонансный контур, настроенный на частоту
гармоники ( 8 f 17.6МГц , добротность контура порядка 500, резонансное
сопротивление порядка 40 кОм). При подключении к контуру полевого
транзистора типа КП306 собственные шумы системы почти полностью
определялись шумами контура и составляли 10 18 Вт в полосе 1кГц .
Далее использовалось преобразование частоты и детектирование сигнала с
помощью АЦП. На входе АЦП полоса сигнала была 1 кГц, тактовая частота АЦП 2 кГц. Анализ спектра шумов проводился с помощью Быстрого
Преобразования Фурье (массив из 512 слов).
Поперечные сигналы пучка
Для регистрации поперечных сигналов пучка используется датчик, сигнал с которого пропорционален смещению пучка. Пусть это будет токовый датчик. И пусть только одна частица с зарядом е циркулирует в накопителе. Из-за наличия
у неё бетатронных
I
колебаний, т. е. колебаний по X (и по Z в
общем случае), всякий
раз, когда она минует
датчик (т. е. через период обращения), на
выходе датчика появРис. 6.6
ляется короткий импульс, амплитуда которого всякий раз иная (рис. 6.6). Амплитуда каждой линии пропорциональна поперечному смещению пучка a(t) и току частицы (т. е. дипольному
моменту):
I a(t ) I (t ) D(t ) , a(t ) a0 a cos(qt ) .
Здесь a0 – среднее смещение пучка, а – амплитуда бетатронных колебаний, q – нецелая часть частоты бетатронных колебаний ( Q ). Фаза колебаний случайна. При a0 0
63
D(t ) a cos(qt ) ef 1 2 cos(nt )
n 1
a ef cos(qt )
cos(n q )t
cos(n q)t .
n 1
n 1
Это не что иное, как
амплитудная моду(1-q)f (1+q)f
(4-q)f (4+q)f
ляция гармоник частоты обращения с
подавленной несущей
(рис. 6.7).
Наличие
гармоники
3f
4f
qf
f
2f
несущей
частоты
указывает на средРис. 6.7
нее смещение пучка.
Измерение хроматичности
Наблюдаемая ширина бетатронных линий зависит как от разброса частот обращения пучка, так и от собственного разброса бетатронных частот:
df f dp p , dq Q dp p , Q f f .
Здесь так называемая «хроматичность» – свойство магнитной системы
накопителя. Сумма этих двух эффектов приводит к тому, что ширины
нижней и верхней бетатронных линий могут оказаться существенно различными:
dp
dp
dfl
f (n q) Q , dfu
f (n q) Q .
p
p
Для нижней линии это доказывается следующим образом:
dp
dp dp
d f (n q) df (n q) f dq f (n q) fQ
f (n q) Q .
p
p
p
В зависимости от знака хроматичности и знака шире оказывается
либо нижняя, либо верхняя линия. Коль скоро ширины линий известны,
можно рассчитать величину хроматичности из следующего соотношения:
dfu dfl q Q
.
dfu dfl
n
64
Измерение поперечного размера и среднего смещения пучка
Мощность в нижней и верхней бетатронных линиях, очевидно, одна и
та же и средний квадрат дипольного момента в окрестности какой-либо из
бетатронных частот равен
1
D 2f a 2 (ef ) 2 N .
2
Таким образом, если ток пучка известен, можно расчётным путём получить поперечный размер пучка:
I n2 2(ef ) 2 N , arms 2 Dnrms I nrms .
При наличии в разностном сигнале несущей, обусловленной средним
смещением пучка a0 , средний квадрат дипольного момента в окрестности
какой-либо гармоники частоты обращения пучка равен:
Dn2 2a02 (ef ) 2 N .
Это выражение, в принципе, позволяет рассчитать величину среднего
смещения a0 . Однако сигнал
Dn2 , как правило, невелик, так как
a02 a 2 . Поэтому среднее смещение пучка определяется путём измерения (на какой-либо из гармоник частоты обращения) среднего значения
произведения дипольного момента на ток:
Dn I n a0 I n2 2a0 (ef ) 2 N .
Отсюда a0 получается расчётным путём.
65
7. Феррит на высоких частотах
Во многих устройствах, имеющих отношение к ускорительной технике,
используются ферриты. В частности, в состав рассмотренного в разд. 5
широкополосного датчика тока пучка входит ферритовое кольцо 200ВНП.
Какая, однако же, польза от этого ферритового кольца на частотах порядка
1 ГГц и выше?
Как известно, на высоких частотах магнитная проницаемость феррита
падает и растут потери в феррите. Эти характеристики различны для
ферритов разных марок и разных значений начальной магнитной проницаемости i . Традиционно в литературе для описания поведения магнитной
проницаемости применяется следующее выражение (ещё раз подчеркнём:
это чисто феноменологическое, т.е. описательное представление):
i .
В справочниках приводятся графики зависимости от частоты действительной части ( Re ) и тангенса угла потерь ( tan ),
полученные эмпирическим путём, что затрудняет выбор подходящей марки феррита для решения конкретной задачи, поскольку за этой эмпирикой
не просматривается сколько-нибудь разумная модель феррита.
На рис. 7.1 (слева) приведены типичные логарифмические графики
( ) . Создаётся впечатление, что ферриты с меньшей начальной проницаемостью более высокочастотны. Вместе с тем можно заметить, что огибающая, построенная по точкам излома характеристик, падает как 1 ,
т. е. 20 дБ на декаду.
1000
100
10
10
100
1
10
10
100
1
10
Рис. 7.1
Почему, однако, нас должно волновать поведение действительной части магнитной проницаемости и относительная величина потерь? Ведь в
случае феррита для описанного выше широкополосного датчика и в большинстве других случаев (дроссели, трансформаторы и т. п.) представляет
интерес только шунтирующий импеданс, т. е. модуль магнитной проницаемости. При таком подходе феррит разумно описывать так, как это изоб66
ражено на том же рисунке справа. Это логарифмические частотные характеристики модуля магнитной проницаемости для ферритов с разными
начальными магнитными проницаемостями. Соответствующая этим графикам (и, надо полагать, физике дела) формула имеет вид:
i
.
1 i
Эту формулу, разумеется, можно переписать в терминах , :
1 i
i
i
i
ii
i .
2
2
1 i
1 ( )
1 ( )
1 ( ) 2
Видно, что действительная часть пропорциональна 1 2 при 1 .
Теперь понятно, откуда берутся 40 дБ на декаду для ( ) на левом графике рис. 7.1. Вместе с тем видно, что ферриты с меньшей начальной проницаемостью в смысле шунтирующего импеданса не являются более высокочастотными. При измерениях импеданса различных ферритов оказывается, что точки пересечения уровня 0дБ, рассчитанные согласно выражению 1 i различаются в гораздо меньшей степени, чем их
начальные магнитные проницаемости.
Понятие шунтирующего сопротивления
Рассмотрим ферриты в виде колец. Пусть L1 – индуктивность данной
обмотки для 1 . Тогда импеданс, надо полагать, будет иметь вид
Z a iL1
i
.
1 i
С другой стороны, если взять параллельное соединение не зависящей от
частоты индуктивности L1i с неким сопротивлением Rs (назовём его
шунтирующим сопротивлением), то импеданс этой цепи будет равен
iL1i Rs
i
.
Zb
iL1
iL1i Rs
1 iL1 i Rs
Выражения для Z a и Z b подобны. Если шунтирующее сопротивление
принять равным Rs L1 i L1 1 , где, по определению, 1 i , то
окажется, что Z a Z b . Следовательно, имеем эквивалентную схему, элементы которой не зависят от частоты.
Для ферритового кольца K 7 4 2 , в расчете на один виток, Rs оказывается порядка 10 Ом и весьма слабо зависит как от начального значения
67
i (по меньшей мере для i меньше 1000), так и от марки феррита (по
меньшей мере для ферритов марок НМ, НМ1, НМ2, НМ3, НН). Естественно, величина Rs зависит от размеров кольца, впрочем, так же, как и величина L1 . При этом величина 1 оказывается почти постоянной. Соответствующая частота «единичной» магнитной проницаемости оценивается
величиной
1
F1
10 ГГц .
2 1
В связи с этим заметим, что первая буква «Н» в маркировке упомянутых выше ферритов означает «низкочастотный».
В дополнение к предложенной модели для ферритов с i 600 следует учитывать конечную собственную омическую проводимость феррита.
На рис. 7.2 приведена схема измерения импеданса феррита. Кривая с
выраженным пиком соответствует ферриту с относительно большой омиn 2 L1
n 2 Rs
Анализатор
спектра
-40дБ
2ГГц
Рис. 7.2
ческой проводимостью. Пик соответствует резонансу изображённого на
рис. 7.2 (слева) контура.
Добротность катушки индуктивности на феррите
Добротность катушки индуктивности с ферритом, омической проводимостью которого можно пренебречь, определяется величиной шунтирующего сопротивления. В результате на частоте F можно рассчитывать на
следующую добротность:
F
Rs
1
.
Q
2FL1i 2F
F
68
Чем меньше i , тем больше F : F F1 i . Таким образом, чтобы
получить большую добротность, надо действительно взять феррит с малой начальной проницаемостью и намотать больше витков.
Вместе с тем широко распространенным заблуждением является представление, что для высокочастотных трансформаторов также следует
применять ферриты с малой начальной проницаемостью. Между тем и в
этом случае существенным параметром феррита является только его шунтирующее сопротивление (если можно пренебречь проводимостью феррита) Rs L1 1 . Оно должно быть много больше импеданса цепи, в которую включен трансформатор. Здесь L1 определяется геометрией кольца, а
1 , как отмечено выше, величина почти одинаковая для ферритов с различной начальной магнитной проницаемостью и разных марок.
Ферритовое кольцо с зазором
Пусть средняя длина магнитной линии поля в кольце равна l и в кольце
имеется воздушный зазор высотой d l , как это изображено на рис. 7.3.
divB 0 B1 B2
H1
B1 0 H 1 B2 0 H 2
H 1 H 2
H2
d
rotH j Hdl I
l
H 1 (l d ) H 2 d I
B
0 I
l
1
( d l )
Рис. 7.3
Исходные уравнения Максвелла и результаты расчёта зависимости величины поля от высоты зазора приведены здесь же. Зазор уменьшает величину поля B, как это видно из последнего выражения на рисунке.
Введём эффективную магнитную проницаемость эфф
Подставим сюда i (1 i ) и получим
69
1
.
эфф
i
i
iэфф
, где iэфф
,
1 i 1 1 i
1 i эфф
эфф
1
1
.
1 i 1
1 i
Таким образом, при различных 1 все логарифмические частотные характеристики модулей эфф пересекут уровень 0дБ в одной точке
1 i . Это означает, что в рамках предложенной выше модели ферриты, по крайней мере одной марки, имеют различные начальные магнитные проницаемости благодаря различной плотности ферромагнитного
порошка в связывающем его компаунде. То, что проводимость феррита
уменьшается с уменьшением его проницаемости, подтверждает такое
представление.
Поглощающее свойство ферритов
Рис. 7.4
В рамках предложенной выше модели можно показать, что феррит поглощает сигналы СВЧ.
На рис. 7.4 изображена короткозамкнутая коаксиальная линия с волновым сопротивлением 30 Ом, в конце
которой помещено ферритовое кольцо
200ВНП , Rs 200 , соответствующих
габаритов:
200110 20 ,
( 60 ln 180 110 29.5 ). Волна падает на феррит слева. Для расчёта кольцо разбивается на достаточно
большое число тонких колец, каждое из которых характеризуется временем пролёта волны и своей долей шунтирующего сопротивления.
На рис. 7.5 изображены модель и эквивалентная схема входного импеданса, а на рис. 7.6 – входные импедансы этих схем. Расчёт показывает,
что на частотах выше 6 ГГц входной импеданс линии с ферритом становится чисто активным и равным по величине собственному импедансу
пустой линии, т.е. сигналы с частотой выше некоторой полностью поглощаются ферритом. Характеристики с резонансами относятся к модели и
обязаны конечному числу её линий задержки. Заметим, что согласно модели 1 L1 Rs 64 ps 30 200 9.6 ps , что соответствует частоте
единичной проницаемости F1 1 2 1 16 .6 ГГц . Расчётная же нижняя
частота полного поглощения порядка 6 ГГц.
70
В схемотехнике СВЧ с помощью ферритовых бусинок, надеваемых на
проводники, гасят паразитные СВЧ колебания в линиях, образованных
Рис. 7.5
этими проводниками и землей – шунтирующее сопротивление включается
в линию последовательно. С этой же целью на кабели, соединяющие раз-
Рис. 7.6
личные блоки компьютеров, надеваются ферритовые кольца, о наличии
которых каждый может убедиться по характерным утолщениям.
71
8. Длинные линии и трансформаторы
Электронные устройства для достаточно высоких частот (ВЧ и СВЧ)
имеют модульную структуру. При этом отдельные модули соединяются не
просто проводниками, а согласованными линиями передачи сигналов, как
правило, коаксиальными кабелями с волновым сопротивлением (далее –
импедансом) 50 Ом. Понятие «высокой частоты» условно. Если линия связи имеет большую длину, то это может быть и не очень высокая, по обыденным понятиям, частота. Линия может быть согласована с обеих сторон,
только со стороны приёмника или только со стороны передатчика сигнала.
Рассмотрим согласованную с обеих сторон линию с импедансом 1 ,
в которую включен отрезок линии с импедансом (рис. 8.1 слева, для
1
2
1
1
1
1
2
Рис. 8.1
определенности 1 ) и временем распространения . Амплитуды прошедшего и отраженного сигналов на входе отрезка линии (в исходной линии распространяется сигнал единичной амплитуды) имеют величину
1
2
u
, u
.
1
1
На рис. 8.1 (справа) изображена соответствующая ситуация на входе
отрезка с . Первое выражение очевидно, второе, если угодно, можно
получить путём решения телеграфных уравнений. Однако проще его получить из закона сохранения энергии:
2
2
1
.
u 1
1
1
На другом конце отрезка линии (полагая сигнал в отрезке единичным):
2
1
u
, u
.
1
1
При 3 прошедшая серия имеет вид (рис. 8.2, сверху):
4
( 1) 2
2
4
1 1
1
,
,
,...... .
1
1
72
Рис. 8.2
Отражённая серия имеет вид (см. рис. 8.2, снизу):
2
4
1
4 1 1
1,
,
,......
1,
.
2
1 ( 1) 1 1
Прошедшая и отражённая энергии, получаемые суммированием соответствующих рядов u2 2 2 1 , u2 ( 1) 2 2 1 . Полная энер-
u2
u2
гия
1. Длительность прошедшей серии (имея в виду экспоненциальный спад огибающей):
1
1
ln 1 1 2
t ln 1
(8.1)
1
2
Как видно из табл. 8.1, оценка согласно выражению (8.1) достаточно хороша.
Предельный переход 0 при
Таблица 8.1
const или ( ) const даёт
Точность оценки (8.1)
индуктивность L или ёмкость
2
4
10
C ( ) . Здесь импеданс пред0.91
1.96
4.98
t
ставлен в явном виде.
73
Трансформаторы на длинных линиях
Передача энергии от источника в нагрузку трансформатора осуществляется отнюдь не магнитным полем, «силовые линии которого сцепляют
первичную и вторичную обмотки», как это принято считать. Ферритовый
(или железный) сердечник трансформатора является всего лишь граничным условием – это зона большого шунтирующего импеданса (см. разд. 7),
много большего, чем импеданс входной (выходной) линии трансформатора. Электромагнитная энергия распространяется по связанным между собой линиям передачи. Сердечник трансформатора есть то, что обуславливает эту связь.
Пусть на рис. 8.3 (слева) внутренняя линия трансформатора имеет такой же импеданс, что и входная и нагрузочная линии трансформатора.
И пусть время пролёта сигнала по этой линии равно , а источник сигнала
генерирует короткий импульс.
1
1
2
1
1
1
1
1
2
1
1
Рис. 8.3
Достигший трансформатора импульс огибает его сердечник по цепи,
изображённой на рис. 8.3 (справа). Идём по часовой стрелке: «входной
импеданс внутренней линии (импульс входит в линию сверху) – нагрузка
трансформатора – входной импеданс внутренней линии (импульс входит в
линию снизу)». Импульсы, вошедшие во внутреннюю линию, по достижении её концов следуют по цепям, также огибающим сердечник трансформатора. Всякий раз на стыке цепей с разным импедансом имеются прошедшие и отражённые сигналы.
В нашем случае (импеданс внутренней линии равен импедансу внешних линий) прошедшая серия состоит из двух импульсов (интервал между
импульсами равен ) с амплитудами 0.5, 0.5, отражённая – из двух импульсов с амплитудами 0.5, –0.5 (рис. 8.4). Если импеданс внутренней линии не равен импедансу внешних линий, картина, разумеется, сложнее.
В случае ступенчатого сигнала имеет место задержка фронта.
В импульсной технике эффект блуждания сигнала по внутренним линиям трансформатора обычно описывается с помощью так называемой
индуктивности рассеивания. При этом полагается, что эта индуктивность
есть результат «неполного сцепления потоков магнитных полей первичной
74
и вторичной обмоток». На эту мысль наводит тот факт, что если импеданс
внутренней линии трансформатора устремить к нулю, то устремится к
Рис. 8.4
нулю запасённая в ней энергия и, соответственно, «индуктивность рассеивания». Однако возможна такая конфигурация трансформатора, при которой неполное сцепление потоков не приводит к появлению «индуктивности рассеивания».
Трансформатор без «индуктивности рассеивания»
На рис. 8.5 (слева) изображён трансформатор типа «длинная линия»,
который не имеет пресловутой «индуктивности рассеивания».
0 .5
2
1
2
1
1
1
1
4
2
0 .5
Рис. 8.5
Сигнал, распространяющийся по линии слева в направлении трансформатора, встречает препятствие – большое шунтирующее сопротивление
ферритового сердечника, и вместе с тем две последовательно соединённые
внутренние линии, по которым он и продолжает своё дальнейшее движение. При правильном импедансе (в данном случае 0.5) и равной длине
внутренних линий полоса такого трансформатора в принципе не ограничена никакой «индуктивностью рассеивания».
75
Справа на рис. 8.5 изображён трансформатор импеданса 1 : 4 . Сердечник может быть общим. С помощью двух подобных каскадов можно осуществить трансформацию импеданса в отношении n m2 .
Для получения наибольшей полосы трансформатор должен иметь необходимое число секций – n RН RГ с импедансом внутренних линий
RН RГ m 1 , в которых первичная и вторичная обмотки имеют
равное количество витков m (рис. 8.6). Секция может быть одновитковая,
Г
RГ n
n - число секций трансформатора
RН n
Рис. 8.6
как это изображено на рис. 8.5 (слева) или многовитковая. В любом случае
обмотки должны быть вложены одна в другую, как это изображено на
рис. 8.6 (справа). Здесь импеданс внутренних линий это импеданс линий,
образуемых соседними проводниками.
Мостовой трансформатор типа «длинная линия»
На рис. 8.7 (слева) приведена эквивалентная схема базового элемента
(БЭ) мостового трансформатора типа «длинная линия». БЭ представляет
2
3
1
300H
300 H
4
Рис. 8.7
собой коаксиальный кабель, который намотан на ферритовом сердечнике.
76
С одной стороны оплётка кабеля заземлена, это внешний порт трансформатора. С другой стороны кабель изолирован от земли (настолько, насколько
велик шунтирующий импеданс сердечника БЭ, здесь это индуктивность
300H ). Если схему БЭ дополнить дросселем, как это изображено на
рис. 8.7 в центре, шунтирующий импеданс которого равен шунтирующему
импедансу сердечника БЭ, то получим почти идеальный преобразователь
однополярного сигнала в противофазный. На рис. 8.7 (справа) представлена мостовая схема соединений внутренних портов шести БЭ. Легко видеть, что порты 1–2 и 3–4, порты 1–3 и 2–4 и порты 1–4 и 3–2 трансформатора попарно ортогональны.
На рис. 8.8 приведена та же схема. Источники сигнала с внутренними
сопротивлениями равными импедансу линий (или только нагрузки) вклю1
1
1 2
3
2
1 3
3
2
24
4
3 4
4
23
1 4
Рис. 8.8
чаются в рёбра тетраэдра. Противоположные рёбра тетраэдра образуют
ортогональную пару – сигнал из одного ребра не попадает в другое. Если
сигналы на парах портов (1–2, 3–4), (1–3, 2–4) или (1–4, 3–2) имеют одинаковые амплитуды и фазы (назовём их когерентными), то они попадут
только на порты (1–4, 3–2), (1–4, 3–2) или (1–2, 3–4) соответственно.
Мостовые трансформаторы типа «длинная линия» применяются для
распределения сигналов источника, для суммирования сигналов источников почти когерентных сигналов и для формирования когерентных сигналов из почти когерентных сигналов источников. При этом некогерентные
части сигналов поглощаются в балластных нагрузках, подключенных к
свободным портам трансформатора.
Некорректные схемы с мостовым трансформатором в качестве
прототипа
Порты 1–2 и 3–4 мостового трансформатора ортогональны. Поэтому их
можно соединить последовательно, как на рис. 8.9, или параллельно для
77
работы от общего источника или на общую нагрузку. Аналогично можно
поступить с ортогональными портами 1–3 и 2–4.
Пусть к последовательно соединённым портам подключены источники
с соответствующими выходными импедансами, а к портам 3–2 и 1–4 –
нагрузки. Здесь кроме
прочего заземлена одна
1 3
1 2
1
внутренняя точка транс2
форматора – имеем право.
Пока всё вполне коррект3
но. Очевидно, что линии,
4
3 4
24
заземлённые с обеих сторон, не нуждаются в сердечнике. Более того, с
3 2
1 4
точностью до времени
распространения сигнала
их можно вообще упразднить. Трансформатор приРис. 8.9
обретает вид, представленный на рис. 8.10 (слева), или ещё более простой вид, представленный на рис. 8.10 (справа).
Такой трансформатор является основным элементом схемы для суммирования сигналов от двух источников, между которыми необходима орто100
100
50
50
50
100
100
200
Рис. 8.10
гональность, например, от двух антенн, работающих в разных диапазонах.
Или, напротив, для распределения сигнала одной антенны на два приёмника с целью исключения проникновения отраженного от одного приёмника
сигнала на вход другого.
Так как последние трансформаторы по большому счёту некорректны,
рабочая полоса их тем больше, чем короче их линии.
78
Двойной балансный смеситель
Некорректный мостовой трансформатор применяется в балансных смесителях (рис. 8.11).
Здесь линиями явля100
RF
LO
ются витые тройки проводов, намотанные на
50
50
ферритовых сердечниках. Порты RF (Radio
Frequency) и IF (Intermediate Frequency) лево100
го трансформатора ортоIF
гональны. Также взаим50
но ортогональны верхний и нижний порты
Рис. 8.11
этого трансформатора.
ВЧ-сигнал, поступающий на левый порт (RF), модулируется
НЧ-сигналом, поступающим на нижний порт (IF). Здесь порт LO (Local
Oscillator) – выход. При переносе частоты сигнала вниз левый и правый
порты используются как входы, а нижний – как выход.
79
9. Фильтры постоянного импеданса и дуальные цепи
Обычно в справочниках по расчёту фильтров предлагаются согласованные с обеих сторон лестничные фильтры, которые начинаются с последовательной или параллельной индуктивности или ёмкости [5]. Следует иметь в виду, что сигналы с частотами за пределами полосы прозрачности отражаются от фильтра такого типа в нагрузку со стороны источника
сигнала, что в ряде случаев нежелательно. Так, фильтр на выходе смесителя или усилителя мощности не должен что-либо отражать. В идеале
нагрузка этих устройств должна иметь импеданс, который не зависит от
частоты сигнала – постоянный импеданс.
Фильтры постоянного импеданса
Рис. 9.1
На рис. 9.1 изображён фильтр постоянного импеданса (ФПИ) 1-го порядка (левый резистор на схеме относится к источнику сигнала). Он состоит
из двух фильтров – ФНЧ и ФВЧ, входы
которых объединены. Передаточные
функции НЧ- и ВЧ-ветвей этого фильтра
имеют
соответственно
вид
1 (1 p) , p (1 p) . Первый фильтр
является для второго НЧ-прототипом.
Преобразование
элементов
НЧ-прототипа в элементы фильтра ВЧ
и полосового фильтра осуществляется
известным образом [5].
На рис. 9.2 представлен ФПИ 2-го порядка. Передаточные функции
НЧ- и ВЧ-ветвей этого фильтра имеют соответственно вид
1 (1 2 p p 2 ) ,
p 2 (1 2 p p 2 ) .
Что касается ФПИ любого
порядка, то имеет место следующее.
Если объединить входы
двух фильтров, один из которых является фильтром НЧ, а
другой – фильтром ВЧ, для
которого первый является про-
Рис. 9.2
80
тотипом, то входной импеданс полученной схемы не будет зависеть от
частоты, если эти фильтры при работе от источника напряжения имеют
характеристики передачи Баттерворта.
В табл. 9.1 и 9.2 приведены параметры элементов фильтров Баттерворта такого типа [6]. В табл. 9.1 – параметры элементов НЧ-прототипов, в
Таблица 9.1
Параметры элементов НЧ–прототипов фильтров Баттерворта
Т
П
n2
n3
n4
n5
n6
RИ
1 RИ
0
0
0
0
0
L1
C1
1.4142
1.5
1.5307
1.5451
1.5529
C2
L2
0.7071
1.3333
1.5772
1.6944
1.7593
L3
C3
C4
L4
L5
C5
C6
L6
0.5
1.0824
1.3820
1.5529
0.3827
0.8944
1.2016
0.3090
0.7579
0.2588
табл. 9.2 – параметры элементов соответствующих фильтров ВЧ. Здесь
RИ – сопротивление источника. Буквы Т или П означают, что первый
элемент фильтра включен последовательно или параллельно.
Таблица 9.2
Параметры элементов ВЧ–фильтров Баттерворта
Т
П
n2
n3
n4
n5
n6
RИ
1 RИ
0
0
0
0
0
C1
L1
0.7071
0.6667
0.6533
0.9472
0.6440
L2
C2
1.4142
0.75
0.6340
0.5902
0.5684
C3
L3
L4
C4
C5
L5
L6
C6
2.0
0.9239
0.7236
0.6440
2.3130
1.1181
0.8322
3.2362
1.3194
3.8640
Здесь и ниже параметры элементов фильтров соответствуют, как принято, сопротивлению нагрузок RН 1Ом и частоте среза 0 1 рад с .
Индуктивности и ёмкости реальных фильтров вычисляются согласно
следующим соотношениям ( K L и K C берутся из табл. 9.1 и 9.2):
L
RН
KL , C
1
KC .
RН 0
Почему построенные описанным выше способом фильтры оказываются
фильтрами постоянного импеданса можно пояснить следующим образом.
0
81
Квадраты модулей функций передачи сигнала источника напряжения
для НЧ-прототипа порядка n и соответствующего ВЧ-фильтра Баттерворта
имеют следующий вид:
WНЧ
2
2
1
1 ( 0 ) 2 n
, WВЧ
2
( 0 ) 2n
1 ( 0 ) 2n
.
2
Коль скоро WНЧ WВЧ 1 , суммарная мощность, поглощаемая в
нагрузках этого фильтра, не зависит от частоты. Это означает также, что
не зависит от частоты мощность, отдаваемая источником сигнала. Последнее возможно только в том случае, когда входной импеданс схемы не зависит от частоты.
Дуальные ФПИ
На рис. 9.3 представлен ФПИ 3-го порядка. Этот ФПИ является результатом преобразования ФПИ 3-го порядка описанного выше
типа. Преобразование состоит в том, что индуктивности ФПИ-прототипа заменяются
емкостями
и,
наоборот,
( KC * 1 K L ,
K L* 1 KC ), а параллельные соединения
групп элементов заменяются последовательными и наоборот. Цепь, полученная описанным способом, называется дуальной по отношению к цепи прототипу. Её входной импеданс является обратным входному импедансу цепи-прототипа: Z 1 Z .
Как можно заметить, дуальный ФПИ
представляет собой каскодное соединение
фильтров ВЧ- и НЧ-прототипа, которые
Рис. 9.3
имеют характеристики Баттерворта при работе от источника тока (см. значения элементов этих фильтров также в табл. 9.1 и 9.2).
ФПИ на отрезках линий
Вместо индуктивных и емкостных элементов можно использовать отрезки линий. В этом случае, разумеется, получаются гребенчатые фильтры. На рис. 9.4 изображён ФПИ 4-го порядка на линиях, а на рис. 9.5 характеристики его НЧ-ветви (линейная шкала частот). Числа возле линий –
значения их импедансов. Они берутся также из табл. .9.1 и 9.2. Длины всех
82
линий фильтра должны быть одинаковыми (здесь 1 с). То, что входной
Рис. 9.4
Рис. 9.5
импеданс фильтра не зависит от частоты, показывают линии 0.5 и 0 – характеристики передачи порт in – порт Z.
Симметричный ФПИ
На рис. 9.6 представлен
симметричный ФПИ 1-го порядка. Его передаточная функция имеет вид 1 (1 p) . В силу
симметрии этот фильтр является фильтром постоянного
импеданса с обеих сторон. Это
НЧ-прототип. Известным образом этот фильтр можно пре-
Рис. 9.6
83
образовать в фильтр ВЧ или полосовой [5]. Вместо индуктивности и ёмкости также можно использовать отрезки линий.
Заметим, что сигнал, частота которого находится за пределами полосы
прозрачности этого фильтра, поглощается только в одном внутреннем
резисторе фильтра, а именно в том, который расположен со стороны источника сигнала.
Некоторые применения ФПИ и дуальных цепей
Согласование фидера
С помощью ФПИ можно
обеспечить в принципе идеальное согласование фидера
в тех случаях, когда нагрузка
фидера шунтирована ёмкостью, индуктивностью или
параллельным
контуром.
Такое согласование совершенно необходимо, когда со
стороны источника сигнала
фидер принципиально не
согласован (как, например, в
случае нагруженного на фиРис. 9.7
дер усилителя мощности).
Если нагрузка фидера в
принципе реактивная (индуктивность, ёмкость или параллельный контур),
то благодаря применению ФПИ может быть существенно расширена поло-
Рис. 9.8
са передачи сигнала на такую нагрузку.
84
Сравним модули входных импедансов двух схем, приведённых на
рис. 9.7. Результаты расчёта представлены на рис. 9.8. Цифры на рисунке
Рис. 9.9
относятся к верхней ветви схемы. Полоса её входного импеданса по уровню –3дБ (назовём её номинальной) 0.016 1.6. Полоса входного импеданса
второй схемы при неравномерности в пределах 3дБ заметно уже.
Задача согласования фидера в этом случае решается с помощью ФПИ,
приведённого на рис. 9.9 (здесь наши ёмкость и индуктивность – элементы
ФПИ). Цифры на рис. 9.10 относятся к изображённым здесь характеристикам передачи порт in – порт ou1 фильтра.
Рис. 9.10
Заметим, что полоса по уровню –3дБ здесь составила 0.022 1.1, т. е.
оказалась в 2 раза меньше (в смысле отношения верхней частоты к нижней), чем номинальная полоса. Если объектом питания является именно
85
активная нагрузка, то так тому и быть. Однако если цель состоит в том,
чтобы развить напряжение на ёмкости, индуктивности или параллельном
контуре, а активная нагрузка служит только для согласования фидера, то
полоса соответствующего тракта может быть увеличена путём применения
ФПИ более высокого порядка.
Пусть целью является питание индуктивности.
На рис. 9.11 изображены ВЧ–ветви ФПИ второго-восьмого порядка, а
на рис. 9.12 их характеристики. НЧ–ветви ФПИ здесь не изображены, по-
Рис. 9.11
скольку если фидеры согласованы, то при анализе функции передачи источник-индуктивность они не нужны. Поскольку первая индуктивность
Рис. 9.12
фильтров ВЧ меньше остальных, то она и должна представлять здесь ин86
дуктивность, являющуюся объектом питания, поскольку при этом нижняя
частота искомой функции передачи минимальна. Цифры, приведённые на
рис. 9.12, относятся к фильтру 4-го порядка. Частота 0.225, соответствующая позиции второго вертикального курсора, является нижней частотой
фильтра 2-го порядка. Заметим, что нижняя частота искомой функции передачи для ФПИ 4-го порядка почти в 2.5 раза меньше соответствующей
частоты для ФПИ 2-го порядка.
Описанная техника ФПИ была применена для согласования фидера,
питающего ускоряющее устройство протонного синхротрона ТРАПП
(ИЯФ) и для уменьшения нижней частоты тракта при заданной величине
шунтирующей ускоряющий зазор индуктивности.
Многокаскадные ФПИ
Можно построить ФПИ высокого порядка, используя ФПИ меньшего,
Рис. 9.13
например, 2-го порядка, как это изображено на рис. 9.13. Такой ФПИ за-
Рис. 9.14
87
мечателен возможностью покаскадной настройки, а также одинаковостью
своих однотипных элементов.
Рис. 9.15
Если при фильтрации короткого сигнала (для его удлинения) выбросы
на переходной характеристике недопустимы, можно использовать много-
Рис. 9.16
каскадный ФПИ на базе ФПИ 1-го порядка. На рис. 9.14 изображён такой
ФПИ 12-го порядка, а на рис. 9.15 – его переходная характеристика (порт
Рис. 9.17
88
in – порт 12). Характеристики этого фильтра не изменятся, если заменить
его дуальным ему ФПИ. Однако если индуктивные элементы реально являются линиями (см. рис. 9.16; рис. 9.18), то в полосе задержания указан-
Рис. 9.18
ные характеристики будут различными (рис. 9.17, 9.19).
Здесь импедансы всех линий 440 Ом, числа возле линий – их длина в
секундах. Фильтр, подобный изображённому на рис. 9.18, разработан для
Рис. 9.19
растяжения до 5 нс очень короткого сигнала пучка (25 пс) на входе пикапстанций датчиков тока изображения для измерения положения пучка в
канале БЭП–ВЭПП-2000 (ИЯФ).
Многокаскадный ФПИ, базовыми элементами которого являются одинаковые ФПИ 1-го порядка, обладает следующим свойством. Модуль коэффициента передачи одного звена первого порядка равен
K1 1
1 ( 1 ) 2 . Пусть имеется n звеньев и пусть все постоянные вре-
мени звеньев равны n 1
n . Тогда
89
n
n
1
1
1
2 2
Kn
1
(
)
exp ( 1 ) 2 .
1
n
2
1 ( ) 2 n n
1
Таким образом, если спектр входного сигнала простирается, грубо говоря, до бесконечности (это спектр очень короткого импульса), то наш
фильтр вырежет из него часть спектра, которая будет иметь нормальную
форму. А как известно, спектру нормальной формы соответствует импульс
нормальной формы.
Пример применения дуальной цепи
На рис. 9.20 изображена упрощённая схема питания несогласованного
(в силу ряда преимуществ) кикера Системы обратной связи для подавления поперечных колебаний пучков электронов и позитронов в накопителе
ВЭПП-4М (ИЯФ). Тракт кикера включает разделительный конденсатор и
Кикер
Нагр.
1 4 1 2
3 4
10 nF
1 3
УМ
3 2 2 4
6.25 H
Линия 25 Ом
Рис. 9.20
линию кикера с импедансом 25 Ом (схема питания второй линии кикера
аналогична). Для того чтобы отражённый от несогласованного конца линии кикера сигнал не отправился обратно к усилителю мощности (УМ),
схема включает мостовой трансформатор (см. разд. 8) и тракт дуальный
тракту кикера. Здесь дуальный тракт – это шунтированная индуктивностью короткозамкнутая линия, дуальная разомкнутой линии кикера. Отражённый от дуального тракта сигнал является инверсным по отношению
к сигналу, отражённому от тракта кикера:
Z 1 1 Z 1
Z 1
.
u
Z 1 1 Z 1
Z 1
Поступая на порты 1 2 || 3 4 и 1 3 || 2 4 мостового трансформатора, эти
сигналы следуют только в балластную нагрузку трансформатора.
90
Формирование импульсных сигналов
без постоянной составляющей
Тракты распространения сигналов содержат, как правило, шунтирующие индуктивности (например, трансформаторы) и / или разделительные
ёмкости. В результате постоянная составляющая сигнала не проходит по
тракту. Если низкочастотных постоянных времени несколько, то после
сигнала в форме видеоимпульса (далее – просто импульса) появляются
колебания, длительность которых много больше длительности импульса,
что может привести к искажению следующего импульса. Если же наш им-
Рис. 9.21
пульс дополнить подобным ему задержанным импульсом другого знака, то
такая группа не будет иметь постоянной составляющей, что решает указанную проблему.
На рис. 9.21 изображёны два последовательно соединённые симметричные ФПИ на отрезках линий. Линии задержки на входе и выходе здесь
Рис. 9.22
только для того, чтобы разнести во времени осциллограммы сигналов с
различных портов.
На рис. 9.22 слева направо: входной импульс (порт in), группа из двух
противофазных импульсов после первого фильтра (порт ou1) и группа им91
пульсов после двух фильтров (порт ou2). Длины линий очевидно должны
быть больше половины длительности импульса, чтобы не испортить его
форму.
На рис. 9.23 сверху изображены амплитудные и фазовые частотные характеристики однокаскадного, а снизу – двухкаскадного фильтров. Заме-
Рис. 9.23
тим, что если через однокаскадный фильтр не проходит сигнал постоянного тока (или помеха), то через двухкаскадный не проходит линейно изменяющийся сигнал, а через трёхкаскадный – квадратично изменяющийся
сигнал и т. д.
92
10. Адаптивная система управления протонным синхротроном
В настоящем разделе рассматриваются некоторые общие принципы организации систем управления на примере системы управления уже не существующего протонного синхротрона ТРАПП (ИЯФ).
Некоторые параметры синхротрона ТРАПП (терапия рака протонным
пучком) приведены в табл. 10.1.
Таблица 10.1
Параметры протонного синхротрона ТРАПП
Энергия инжекции
Энергия выпуска
Диапазон перестройки частоты ВЧ–системы
Длительность цикла ускорения
Интенсивность ускоренного пучка
МэВ
МэВ
МГц
с
0.7
70-300
0.9-15.2
1
p c
10 9
Обычно, когда описывается система управления установкой, речь идёт,
в основном, об оборудовании – о типе управляющих ЭВМ, стандарте
устройств управления (CAMAC, VME и т. п.). Упоминаются, впрочем,
виды операционных систем, стандарты коммуникаций, количество каналов управления и контроля и т. д. Однако разработчики таких систем
должны понимать, что суть системы управления не в оборудовании. На
начальном этапе разработки следует, прежде всего, сформулировать концепцию системы управления, а затем определиться с её архитектурой.
Концепция системы управления
Специфика протонного синхротрона ТРАПП заключается в облучении
объектов (пациентов) методом сканирования для реализации протонной
томографии. Вытекающая отсюда задача управления энергией и другими
параметрами пучка, исходя из текущих, заранее не известных значений
параметров облучаемого объекта, решается на основе следующей концепции системы управления:
А. Основные параметры установки (среднее магнитное поле, частота и
амплитуда ускоряющего напряжения, радиальное положение пучка и ряд
других) задаются с помощью таблиц сравнительно небольшого размера;
Б. Все эти параметры в процессе управления энергией пучка должны
изменяться синхронно и непрерывно;
В. Анализирующие ситуацию программы / оператор в любой момент
времени должны иметь возможность изменить порядок сканирования и
значения табличных данных без прерывания процесса управления параметрами пучка.
93
Требования А, Б и В реализованы следующим образом:
1. Система управления разделяется на две ЭВМ, одна из которых,
«клиент», непосредственно управляет цифро-аналоговыми преобразователями (ЦАП) и другими устройствами. Другая ЭВМ, «сервер» является посредником между оператором и ресурсами системы управления.
(Это принципиальное разделение не исключает наличия нескольких
ЭВМ для управления, сбора и отображения данных. Система управления
ТРАПП включает 5 микроЭВМ в стандарте CAMAC, являющихся интеллектуальными контроллерами крейтов.)
2. ЭВМ «клиент» загружается единственной программой, работа которой не может быть прервана извне в процессе управления параметрами
пучка. Она, после выполнения предписанных ей операций, только по собственной инициативе читает директивы и данные, приготовленные для неё
«сервером».
3. ЭВМ «клиент» в интервалах между импульсами системного таймера осуществляет асинхронную передачу данных в сплайнинтерполирующие ЦАПы, которые под управлением того же таймера формируют синхронные гладкие функции времени.
Коротко последний пункт предложенной архитектуры системы управления иначе формулируется следующим образом: «асинхронная загрузка –
синхронное исполнение».
На рис. 10.1 изображена схема операций ЭВМ «клиент» в течение рабочего цикла таймера.
Запрос прерывания & исполнение загруженных данных / директив
ЭВМ свободна для сбора и
передачи данных,
получения данных от
других ЭВМ и директив
оператора
ЭВМ занята загрузкой
регистров устойств,
непрерывно управляющих
процессом ускорения
Рис. 10.1
К началу очередного цикла таймера «клиент» заканчивает все операции
и зависает в ожидании запроса на обслуживание (LAM – Look At Me) от
системного таймера. При поступлении LAM, в течение первой фазы цикла
таймера, «клиент» передаёт данные в устройства, значения которых (данных) и перечень которых (устройств) заранее (например, во второй фазе
предыдущего цикла таймера) определены анализирующими ситуацию
программами / оператором. Во второй фазе цикла таймера «клиент» читает
94
и выполняет директивы «сервера», после чего осуществляет сброс LAM
таймера и зависает в ожидании следующего LAM.
Рабочий интервал таймера достаточно велик, чтобы передача данных и
выполнение директив были завершены, прежде чем появится следующий
импульс таймера. Если при генерировании очередного импульса таймера
LAM не сброшен (операции не завершены), таймер выставляет сигнал
Q 1 , что указывает оператору на необходимость либо сократить число
обслуживаемых устройств в данном цикле таймера, либо увеличить длительность циклов таймера.
Примеры директив «сервера» для «клиента»:
изменить значение того или иного элемента таблицы (настройка);
перемещаться по таблице вперёд или назад (увеличивать или
уменьшать энергию пучка в зависимости от результата облучения);
прервать процесс изменения энергии (например, для измерения частот бетатронных колебаний при текущих значениях параметров пучка);
изменить радиальное положение пучка согласно дополнительной
таблице (например, для перемещения пучка в зону действия дефлектора).
Для реализации на синхротроне ТРАПП системы управления описанной архитектуры потребовалось разработать единственное специальное
устройство – сплайн-интерполирующий ЦАП (сплайн-ЦАП).
Сплайн-интерполирующий ЦАП
В случае синхротрона ТРАПП, предназначенного для медицинских целей, управление параметрами пучка должно осуществляться, с одной стороны, максимально быстро, а с другой стороны, источник питания магнитов не должен перегружаться, чтобы сохранить непрерывность и, следовательно, точность управления.
Каков бы ни был сигнал, управляющий источником питания магнитной
системы, напряжение на выходе последнего не может измениться мгновенно. В первом приближении оно, с некоторой задержкой, нарастает прямо пропорционально времени. Следовательно, управлять током магнитов
(индуктивная нагрузка) следует с помощью сигналов, имеющих кусочную
гладкость не хуже, чем t 2 . Такого уровня гладкость достаточна для того,
чтобы реализовать почти предельный темп изменения ведущего магнитного поля и при этом избежать ограничения сигналов в цепях управления
током источника.
При высокой частоте посылок данных в ЦАП, для формирования
«гладких» функций времени в принципе достаточно отфильтровать ступенчатый сигнал. При этом, однако, либо значительно возрастает нагрузка
на процессор, либо требуется модуль ЦАП со своим процессором. В пер95
вом случае, кроме того, либо пропорционально частоте посылок возрастает длина таблицы данных, либо время процессора занимает программа
формирования этой таблицы.
Наиболее адекватным поставленной задаче является аналоговый
сплайн-ЦАП – формирователь синхронных гладких функций времени.
На рис. 10.2 изображена блок-схема сплайн-ЦАПа 2-го порядка, формирующего кусочно-параболическую функцию времени (первая производная непрерывна).
ЭВМ
ЦАП
A
B
1
u
in
ЭВМ Таймер
C
1
u
in
dt
D
Вых.
a1 1.5
a0 1
ЭВМ
dt
1
Рис. 10.2
Он состоит из 13-разрядного ЦАПа (12 разрядов умножающего ЦАПа
572ПА2А плюс знак, выходное напряжение от –8.192 до +8.190 В с шагом
2мВ), на выходе которого формируется ступенчатый сигнал A, и интерполятора. Интерполятор включает два интегратора с регулируемыми от ЭВМ
постоянными времени интегрирования ( 1 50, 100, 150, … , 750 Гц),
схему выборки-хранения и схему сравнения исходного сигнала А с некоторой линейной комбинацией сигналов C и D с выходов интеграторов.
Постоянные времени интеграторов c точностью лучше 1 % равны интервалу таймера ( T ).
Очередной скачок напряжения на входе интерполятора должен появиться в пределах интервала, предшествующего очередному импульсу
таймера. Эпюры А, B, C, D слева на рис. 10.3 иллюстрируют реакцию интерполятора на элементарный скачок.
Интерполятор является линейным устройством – сигнал на его выходе
есть суперпозиция реакций на элементарный скачок. Справа на рис. 10.3
изображены эпюры A, B, C, D при ступенчато-линейном росте сигнала А.
Стрелки указывают на то, что скачки сигнала А произошли непосредственно перед импульсами таймера. Задержка такого сигнала равна a1 ,
что верно для сплайн-ЦАПов любого порядка.
96
Сплайн-ЦАП порядка n должен иметь n интеграторов. Очевидно, что в
случае сплайн-ЦАПа более высокого порядка можно увеличить интервал
таймера при сохранении качества интерполяции.
Таймер
1
2
3
6
7
8
9
11
A
B
C
A
a1
D
Рис. 10.3
Чтобы при ступенчатом сигнале на входе интерполятора выходной
сигнал сплайн-ЦАПа n-го порядка представлял собой нарастающую функцию времени с непрерывной n 1 -й производной, сигнал на входе первого
интегратора должен быть последовательностью сигналов следующего вида:
u1, u2 ,..., um ,..., un 1,(n 1),..., (1)m 1 (n 1)! ,..., (1)n 1 .
(n m)!(m 1)!
Значения коэффициентов обратной связи a1 , … , an 1 определяются из
системы линейных уравнений, составляемых для n 1 моментов таймирования (при n 2 это момент 2 на рис. 10.3).
Согласование частоты ускоряющего напряжения с уровнем
ведущего магнитного поля
В функции высокочастотной системы (ВЧ-системы) входит, прежде
всего, формирование ускоряющего напряжения, частота которого согласована с уровнем ведущего магнитного поля, чтобы иметь постоянное значение среднего радиуса равновесной орбиты пучка.
97
Наиболее распространённым является способ согласования частоты и
поля, при котором необходимая функциональная связь реализуется с помощью датчика производной магнитного поля и интегрирующего функционального преобразователя. При этом генерируется непрерывная кусочноV
Б1
50000кГц
Г2
F2
ГФЧ
ЭВМ Таймер
V
А1
F0
ЭВМ
В2
УУ
ПУЧОК
Л1
ЛЗ
Г1
Г3
Ф2
ФНЧ
F3
С2
F5=F3-F2=50кГц
Л2
ЛЗ
ЭВМ
F4
К1
К2
ЭВМ
ЦАП
АТТ
А4
ЭВМ
Таймер
X
Ц4
ЦАП
ЭВМ
Н1-Н4
ЭВМ
Таймер
НОРМА
X
B
Б5
БС
Ц3
Б4
АТТ
А3
ПС
Е1-Е4
ЭВМ
ИНТ
+
Д1
ШДТ
П1-П4
В5
В4
ФД
F4=F3-F1
Формирователь Сигнала Коррекции
А2
Б2
АТТ
ЭВМ
Стоп
Старт
В1
УМ
F1
50050кГц
Б3
ДА В3
F0=F2-F1
ГУН
ГФЧ
ЭВМ
Таймер
ЦАП
Ф1
ФНЧ
С1
АТТ
ЦАП
Ц1
Ц2
B
Б6
Ц5
ЦАП
Д2
СУММА
ДХ
В6
В7
ИСТ
ПОЛЕ
Рис. 10.4
линейная функция времени, изломы которой соответствуют табличным
значениям поля. Такой способ реализован, в частности, на ионном синхротроне Б-5 (ИЯФ).
На синхротроне ТРАПП реализован способ согласования частоты и поля, при котором необходимая функциональная связь определяется таблицами кодов для двух сплайн-ЦАПов 2-го порядка – формирователей син98
хронных гладких (в смысле непрерывной первой производной) функций
времени.
Цепь формирования ведущего магнитного поля (рис. 10.4) включает
сплайн-ЦАП Ц5, схему сравнения Б6 табличного значения величины поля
B с его фактическим значением B , вырабатываемым системой датчиков
Холла Д2, и источник стабилизированного тока питания магнитов В7.
Из-за инерционности магнитной системы в динамике возникает расхождение между табличным значением поля и его фактическим значением, в то время как инерционность установления частоты F1 задающего
генератора управляемого напряжением (ГУН) Г1 незначительна. Чтобы
частота ускоряющего напряжения соответствовала фактическому значению поля, предусмотрена схема коррекции частоты ГУНа Г1 по разности
B B , включающая схему сравнения Б5 и управляемый ЭВМ аттенюатор
А4.
В каждой фазе цикла управления полем устанавливается такое значение GB коэффициента передачи аттенюатора А4, чтобы выполнялось следующее соотношение:
S F GB S B dF 0 dB dF1 dB .
Здесь S B du dB – чувствительность датчиков Холла, S F ( F1) dF1 du
– крутизна характеристики ГУНа Г1 по входу коррекции частоты. При
этом частота ускоряющего напряжения F 0 будет соответствовать фактическому значению поля B (с точностью до поправок более высокого порядка):
dF 0
F 0( B ) S F GB S B ( B B ) F 0( B )
( B B ) F 0( B) .
dB
Разумеется, частоту и поле можно согласовать путём формирования
опережающей таблицы для поля или путём соответствующей коррекции
значения частоты ускоряющего напряжения на момент инжекции с возложением задачи последующей коррекции частоты на систему о.с. «по пучку». Тем не менее заложенная схема коррекции не является излишней, поскольку обеспечивается надёжность проекта.
Формирование частот ВЧ-системы
Сигнал с частотой ускоряющего напряжения F 0 (0.9 15.2)МГц
формируется супергетеродинным способом: сигнал задающего генератора
Г1 (рис. 10.5) с частотой F1 (49.1 34.8)МГц смешивается с сигналом
фиксированной частоты F 2 50000кГц кварцевого генератора Г2.
99
Заметим, что обычно для формирования ускоряющего напряжения
применяются непосредственно либо управляемые напряжением генераторы (как в случае ионного синхротрона Б-5), либо синтезаторы частот.
Между тем супергетеродинный способ формирования сигнала с частотой ускоряющего напряжения позволяет аналогичным образом сформировать сигнал с частотой F 4 F 3 F1 F 0 F 5 , который используется в
качестве гетеродинного в системах диагностики фазы и положения пучка.
На рис. 10.5 изображены значения и диапазоны перестройки частот (не в
масштабе).
F 5 50 кГц
0
F 0 (0.8 16 .0) МГц
F1 (49 .2 34 .0) МГц F 2 50000 кГц
F 4 F 3 F1 F 0 F 5
F 3 50050 кГц
Рис. 10.5
Цепь формирования ускоряющего напряжения (см. рис. 10.4) включает
генератор Г1, управляемый выходным напряжением сплайн-ЦАПа Ц1,
кварцевый генератор Г2, управляемый напряжением аттенюатор А1, смеситель С1, фильтр нижних частот Ф1, усилитель мощности В1, ускоряющее устройство В2, детектор амплитуды В3, сплайн-ЦАП Ц2 – формирователь табличного значения амплитуды ускоряющего напряжения V и
схему сравнения Б1 этой амплитуды с её фактическим значением V.
Цепь, включающая генератор Г1, кварцевый генератор Г3, смеситель
С2 и фильтр нижних частот Ф2, служит для формирования гетеродинного
сигнала.
Библиографический список
1. Мешков И. Н., Чириков Б. В. Электромагнитное поле. Новосибирск:
Наука. Сиб. отд-ние, 1987. Ч. 1: Электричество и магнетизм.
2. Гольдин Л. Л., Кузьмин А. А. О форме электродов, измеряющих
смещение пучка заряженных частиц // ПТЭ. 1967. №2, с. 27.
3. Брук Г. Циклические ускорители заряженных частиц. М.: Атомиздат, 1970.
4. Москалёв В. А., Сергеев В. И., Шестаков В. Г. Измерение параметров пучков заряженных частиц. М.: Изд-во МГУ, 1980.
5. Ханзел Г. Справочник по расчёту фильтров. М.: Сов. радио, 1974.
6. Хоровиц П., Хилл У. Искусство схемотехники. М.: Мир, 1983. Т. 2.
100
Рис.4.07
101