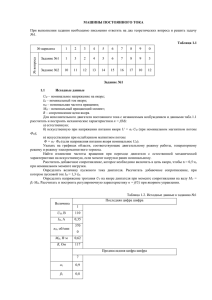
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
advertisement

Министерство образования и науки Российской Федерации Федеральное агентство по образованию Саратовский государственный технический университет АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Методические указания к выполнению курсовой работы по дисциплине «Технические средства автоматизации и управления» для студентов специальности 210100 Одобрено редакционно-издательским советом Саратовского государственного технического университета Саратов 2011 ВВЕДЕНИЕ Курсовая работа является заключительным этапом обучения студентов по дисциплине "Электромеханические системы" и имеет целью углубление и закрепление теоретических знаний, полученных студентами при изучении дисциплины, а также приобретение практических навыков при решении конкретной технической задачи, развитие навыков самостоятельной работы с технической литературой в ходе анализа и расчетов, приобретение творческих навыков в использовании ЭВМ как составного элемента системы автоматизированного проектирования (САПР), получение практических навыков в оформлении технической документации в соответствии с единой системой конструкторской документации (ЕСКД) Содержание курсовой работы составляют вопросы автоматизации управления исполнительными двигателями постоянного тока как составной части электропривода. Электропривод (ГОСТ 16593-93)- это электромеханическая система, состоящая из электродвигательного устройства, преобразовательного устройства, передаточного устройства (редуктора), управляющего устройства и предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. Электродвигатель является основной частью электропривода. Современный электропривод всегда является автоматизированным. Как правило, все процессы, связанные с пуском, остановкой, регулированием частоты вращения двигателя, обеспечиваются средствами автоматики. Целью курсовой работы по данной теме является определение параметров и характеристик переходного процесса заданного двигателя постоянного тока независимого возбуждения при автоматизации пуска и торможения с последующей разработкой схемы автоматического управления. Выполняемый объем работ является частью этапа эскизного проектирования. При этом считается, что на основании технического задания, выданного заказчиком, на этапе технического предложения разработчиком принята схема автоматизации пуска за счет ограничения пусковых токов с помощью пусковых резисторов и схема автоматизации останова способом динамического торможения. Расчет сопротивлений резисторов при пуске и динамическом торможении представляет собой первую часть курсовой работы. Вторая часть заключается в расчете переходных процессов при пуске и динамическом торможении, т.е. определение времени переходного процесса и нахождение зависимостей частоты вращения и тока якоря от времени. Первая и вторая части сначала выполняются вручную, а затем проводится расчет на ЭВМ. При расчете переходных процессов вручную пренебрегают индуктивностью якорной обмотки, а при расчете на ЭВМ эту индуктивность учитывают, и переходной процесс определяется более точно. Третья часть работы состоит в разработке принципиальной электрической схемы автоматического управления пуском и торможением заданного двигателя постоянного тока, а также из подробного описания ее работы. Тему курсовой работы и номер варианта (в соответствии с номером по списку в журнале) указывает преподаватель. Курсовая работа оформляется в соответствии с требованиями к текстовым документам (ГОСТ 2.105-92) и отчетам о научноисследовательской работе ГОСТ 7.32-91). 1. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТОВ В исходных данных (табл.1) указаны следующие основные технические данные согласно [1,2]. Индуктивность якорной обмотки определена по ориентировочной формуле. 1. Р2Н - номинальная мощность на валу двигателя (кВт). 2. UН - номинальное напряжение (В). 3. IЯН - номинальный ток якоря (А). 4. nН - номинальная частота вращения (об/мин). 5. R - сопротивление обмотки якоря (Ом). 6. L - индуктивность обмотки якоря (Гн). 7. J - момент инерции якоря (кг.м2). Кроме того, для выполнения курсовой работы указывается: 1. Отношение момента сопротивления нагрузки к номинальному на валу двигателя а (%). 2. Тип схемы управления: Т, С, В - соответственно управление в тока, скорости, времени. Предполагается, что момент сопротивления нагрузки представляет собой момент сухого трения, т.е. не зависит от величины частоты вращения и изменяет свой знак при изменении направления вращения. При расчетах и дальнейшем анализе разработанной системы управления используется математическая модель ДПТ в форме: di L я U ( R RД )iя k эм ; dt (1) d J k эмiя M Т M НГ . dt где L - индуктивность якоря; iя - ток якоря; R - активное сопротивление цепи якоря; RД - дополнительное сопротивление, включенное в цепь якоря; - угловая скорость якоря; J - приведенный момент инерции якоря; M Т момент трения в коллекторе и подшипниках; M НГ . - момент нагрузки; k эм - единый электромагнитный коэффициент, определяемый конструкцией данного двигателя; U – питающее напряжение. Моменты трения с достаточной точностью можно считать изменяющимся по закону: 0, если 0; (3) MТ * M const , если 0 . Т Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде: 0, если 0; M НГ * (2) M НГ const , если 0. 2. ОПРЕДЕЛЕНИЕ НОМИНАЛЬНЫХ ПАРАМЕТРОВ По исходным данным определяют используются в дальнейшем расчете: ряд величин, 1. Номинальная частота вращения в системе СИ 1 nH . 30 с H = 2. Единый электромагнитный коэффициент эм = U H RI Я H H В с 3. Номинальный электромагнитный момент Мн = kЭМIЯН Н м 4. Номинальный момент на валу двигателя Р2Н М2Н = Н м 5. H Момент потерь 6. М0 = МТ= М Н - М2Н Н м Полный момент сопротивления 7. а М 2 H М 0 Н м 100 Ток якоря, соответствующий моменту сопротивления Мс М с =М Т +М Н Г = которые Ic = Мc k эм A 8. Частота вращения двигателя при токе I c c UН RI с kЭМ 1 C 3. РАСЧЕТ ЧИСЛА СТУПЕНЕЙ ПУСКА На рис. 1 представлена часть принципиальной электрической схемы пуска и динамического торможения двигателя постоянного тока, а на рис. 2 его скоростные характеристики. В рассматриваемом примере число пусковых резисторов т равно двум. В общем случае число пусковых резисторов может быть как больше, так и меньше двух, например, 1, 2, 3, 4, 5 и т.д. Эта величина определяется максимальным и минимальным токами (I1, I 2) при замыкании накоротко пусковых резисторов. Согласно [3]: I1= 2 3 IЯН (1) I2= 1,1 1,2 Iс (2) Расчет числа пусковых резисторов (числа ступеней) может быть выполнен графоаналитически или аналитически. С графоаналитическим Таблица 1 Варианты заданий и исходные данные Вар Тип Номина иан двигате льная т ля мощ ность на валу кВт 1 2 3 МИ-22 МИ-22 Р2Н 0,37 0,25 Номи нальн ое напря жение В Номин альный ток якоря А Номи нальн ая частот а враще ния об/ми н Сопро тивле ние обмот ки якоря Ом Индук тивно сть обмот ки якоря 10-3 Гн Мом ент инер ции якор я 10-3 кг/м2 UН 60 IЯН 8,2 пН 3000 R 0,195 L J 4 60 5,5 2000 0,36 1 2 4 Отно Схема шен управл ие ения моме нта сопр отив лени я к Мн в % а 40 Т 60 С 50 В 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 МИ-31 0,45 60 10,3 3000 0,118 3 9 МИ-31 0,37 110 4,4 2000 0,757 5 9 МИ-32 0,76 110 8,2 2500 0,237 1,7 13,25 МИ-32 0,45 110 5,0 1500 0,605 4,5 13,25 МИ-32 0,37 110 4,2 1000 1,46 8,5 13,25 МИ-41 1,6 110 19,2 2500 0,147 1 40 МИ-41 1,1 110 13,0 1500 0,42 2,5 40 МИ-42 3,2 110 36,3 2500 0,06 0,4 65 МИ-42 1,6 110 18,2 1500 0,192 1,5 65 МИ-42 1,1 110 12,6 1000 0,435 3 65 70 40 60 50 40 35 45 50 60 70 50 50 40 55 65 30 55 45 65 50 70 расчетом можно ознакомиться, например, в[1], § 4.2. При аналитическом расчете число ступеней m определяется соотношением [3]: m = (lnIn/I1)/(lnI1/I2), где In - величина максимального пускового тока при отсутствии добавочных резисторов In UH R (3) Величина m должна быть целым числом. Для достижения этого рекомендуется сначала принять средние значения I1 и I 2 и определить при этих значениях m. Далее найденное значение m округляется до ближайшего целого числа, после чего уточняется ток I1 I1 = е а , а= 1 ln I n m ln I 2 m 1 (4) (5) Т С В Т В С Т Т В С Т С В В Т С В Т С В Т Рис. 1. Часть принципиальной электрической схемы пуска и динамического торможения двигателя постоянного тока Рис. 2. Скоростные характеристики двигателя постоянного тока Возможен и другой алгоритм выбора числа ступеней, при котором задаются рядом значений m (m= 1,2,3...) и по формулам (4), (5) определяют ток I1. Останавливаются на том минимальном значении m, при котором выполняется равенство (1). Именно этот алгоритм выбора числа ступеней программу ЭВМ и должен быть использован при выполнении курсовой работы "вручную". ВТОРОЙ ПОДХОД К РАСЧЕТУ Рассмотренный ранее подход к расчету дополнительных резисторов имеет право на существование. Однако, опыт показал, что он не является удачным, так как в результате максимальные пусковые токи на каждом из этапов пуска различаются в несколько раз. А ведь с точки зрения равномерности нагрузки сети и благоприятного режима работы ДПТ было бы рационально иметь на каждом из этапов пуска равные максимальные пусковые токи. Попробуем реализовать такой подход. 1. Пуск с одним добавочным резистором. Так как в начале первого этапа пуска якорь неподвижен, максимальный пусковой ток на этом этапе будет равен: U , (1в) iп1 R RД где RД – сопротивление дополнительного резистора. Если дополнительный резистор будет отключаться при токе якоря равном I2, то в этот момент угловая скорость будет равна:? U I 2 ( R RД ) . (2в) k эм Тогда максимальный ток на втором этапе пуска будет равен: R RД U k эм . iп2 I2 R R Приравнивая правые части (1в) и (3в), получим: R RД U I2 . R RД R (3в) (4в) Или RД2 2 RRД ( R 2 U R) 0 . I2 (5в) Решая квадратное уравнение (5в), получим искомое значение RД. Решение можно искать вручную, а можно с использованием математического инструментария Mat Lab (оператор roots(P), где Р – матрица строка коэффициентов уравнения). Естественно, решения не отвечающие физическому смыслу нужно отбросить. Найденное решение подставляем в (1в) и проверяем выполнение условия: iп1 I1 . (6в) Если условие (6в) выполняется, то задача решена. Если не выполняется, то необходимо перейти к рассмотрению пуска с двумя дополнительными резисторами. 2. Пуск с двумя дополнительными резисторами. Пусть система имеет два дополнительных резистора RД1 и RД2. Причем после первого этапа пучка отключается резистор RД1, а после второго – резистор RД2. Тогда максимальный ток на первом этапе пуска будет равен: U iп1 . (7в) R RД1 R Д 2 Далее, рассуждая аналогично случаю пуска с одним резистором, получим уравнение третьей степени относительно RД2. 3 RД2 R 2 3RД2 3RД2 R ( R 2 UR ) 0. I2 (8в) Решая его, найдем четыре корня, из которых необходимо отобрать один, исходя из критерия физической реализуемости. Затем по формуле: RД1 R 2Д 2 RД2 . (9в) R Рассчитывается сопротивление резистора RД1. Подставляя найденные значения сопротивлений в (7в), найдем максимальный пусковой ток, а затем проверим выполнение условия (6в). Если оно выполняется, то задача успешно решена. Пример. Пусть R=0,2 Ом; U=60В; I2=5,3 А; I1=25 А. Проверим возможность пуска двигателя с одним дополнительным резистором. Подставляя исходные данные в уравнение (5в), получим: RД2 0,4 RД 2,22 0 . (10в) Решим это уравнение с использованием MatLab: Так как сопротивление не может быть отрицательным, выберем RД 1,3 Ом . Подставляя в (1в), найдем максимальный пусковой ток iп1 Следовательно, условие (6в) не выполняется. 60 40 А. 1,5 Проверим возможность запуска двигателя с двумя дополнительными резисторами. Подставляя исходные данные в уравнение (8в), получим: 3 2 5RД2 3RД2 0,6 RД2 2,22 0 . (8в) Решая его с использованием MatLab, получим: Так как сопротивление не может быть комплексно-сопряженным, выберем RД2 0,57 Ом . Подставляя RД2 в формулу (9в), найдем RД1 2,2 Ом . Подставляя результаты в (7в), найдем максимальный пусковой ток: U 60 iп1 20,2 А. (7в) R RД1 R Д 2 0,2 2,2 0,57 Условие (6в) выполняется, следовательно, задача решена. ХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХ 3. РАСЧЕТ СОПРОТИВЛЕНИЙ РЕЗИСТОРОВ Для естественной характеристики (нулевая ступень) полное сопротивление якорной цепи Rяо равно сопротивлению якорной обмотки R (рис.2). На первой ступени: RЯ1 =R + RД1, (6) где добавочное сопротивление RД1 определяется так: I1 RД1 = 1 R I2 На второй ступени RЯ2 = R + RД1 + RД2 где I1 RД2 = I 2 1 (7) (R + RД1) В общем случае для i-ой ступени: Rяi=R + RДl+RД2+... + RДi, (8) I1 RД1 = 1 R Rд1 ... Rд i 1 (9) I2 При определении сопротивления резистора для динамического торможения Rr исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I1. Поэтому k RT эм c R (10) I1 5. УПРОЩЕННЫЙ РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ И ДИНАМИЧЕСКОМ ТОРМОЖЕНИИ Дифференциальное уравнение, определяющее изменение тока it во время переходных процессов при пуске на i-й ступени имеет вид: d 2i я di Tя iTmi 2 Tм i я i я I уi dt dt (11) где Тяi; - электромагнитная постоянная времени на i-й ступени; TMi электромеханическая постоянная времени на i-й ступени; Iyi - установившееся значение тока на i-й ступени; T яi=L/R яi (12) Tmi=RяiJ/k2эм (13) При расчете "вручную" пренебрегают индуктивностью L якорной обмотки, т.е. принимают Тяi ≈ 0. Тогда можно получить: Tm i di i я I yi dt (14) Решение уравнения (14) имеет вид: iя= Iуi 1 e t / T + Iнач i e t / T Mi Mi где Iнач i - начальное значение тока на i-й ступени. В данном случае для всех ступеней Iуi = Ic Iнач i = I1 Этому для каждой ступени ток iя определяется уравнением (16) t / T Mi iя = Iс 1 e t / TMi + I1 e (16) На основании (16) время tui, в течение которого ток в якоре уменьшается на i-й ступени, определяется так: tui = Тmiln I 1 Ic I 2 Ic Для рассматриваемого примера формула (17) позволяет определить время пуска на второй и первой ступенях. При пуске двигателя по естественной характеристике Tио 3Тмо, где Тмо = RJ / k2эм Здесь ток якоря уменьшается от I1, до Ic. Дифференциальное уравнение, определяющее частоты вращения двигателя на i-й ступени, имеет вид: 2 ТяiTмi d 2 Tмi d = уi (18) dt dt изменение При Тяi 0, получаем Tмi d = уi (19) dt где уi – установившаяся частота вращения двигателя на i-й ступени. Решение этого уравнения имеет вид: t / T (20) = уi 1 e Mi + нач i e t / TMi где нач i - начальная частота вращения на i-й ступени. Каждой ступени при определении соответствует не только свое значение Tмi, но и свои значения начальной и установившейся величин частоты вращения ( нач i , уi ). Так, для рассматриваемого примера (рис.2) при пуске на второй ступени: нач 2 = 0; у2 = с2, где с2 = U H Rя2 Ic , k эм k эм а величина RЯ2 определяется уравнением (7). При пуске на первой ступени: нач 1 = 2 = U H R я1 I1 k эм k эм U H R я1 Ic k эм k эм где величина RЯ1 определяется уравнением (6). При пуске по естественной характеристике (нулевая ступень): у1 = с1 = нач 0 = 1 = U H Rя0 I1 k эм k эм В общем случае при разгоне по i-й ступени: U H R яi I1 нач i = k эм k эм уi = U H R яi I1 k эм k эм Рассмотрим теперь переходные процессы в режиме динамического торможения. Для реализации этого режима якорь двигателя отключается от сети и замыкается на резистор RT, а обмотка возбуждения остается под напряжением, Если считать, что индуктивность якорной обмотки равна 0, то при этом переключении ток в якорной цепи скачком изменяется от IС до IТ (рис. 2), где IТ - величина отрицательная. Рабочая точка перемещается с естественной характеристики 1 на характеристику динамического торможения 2. Далее величины IЯ И уменьшаются до нуля. Если бы после достижения равенства = 0 момент сопротивления не изменил своего знака и оставался постоянным по модулю, то двигатель изменил бы направление вращения и достиг частоты т при токе iя = ic, где т = RT I C kЭМ (23) Однако, после достижения частоты вращения = 0 момент сопротивления меняет свой знак и двигатель останавливается. Ранее указывалось, что при выполнении этой курсовой работы момент нагрузки представляет собой момент сухого трения. Для определения тока якоря во время динамического торможения можно воспользоваться уравнением (15), приняв: Iуi = Iс ; Iнач = IТ При этом получим: iя =Ic(1 – е-t/Tmg) + IТ е-t/Tmg (24) где Тmд = RяtI J ; k 2 эм Rят = RТ + R. Для определения изменения в процессе торможения можно использовать уравнение (20), приняв уi = T; нач i = c При этом получаем = T(1 – е-t/Tmg) + c е-t/Tmg динамического (25) Уравнения (24), (25) справедливы до достижения = 0. Учитывая, что в конце динамического торможения = 0, на основании (25) можно определить время динамического торможения tT = Тmgln 1 c , t где T - величина отрицательная. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ НА ЭВМ Расчет переходных процессов на ЭВМ отличается от расчета "вручную" тем, что здесь решаются не упрощенные, а полные дифференциальные уравнения с учетом индуктивности обмотки якоря, определяющие изменения i2 и , т.е уравнения (11), (18). Известно, что при Tмi>4Тяi (26) Переходной процесс получается апериодическим и решения дифференциальных (11), (18) имеют вид: t t = у + А1е + А2е iЯ=IС+В1е t +В2е t , где корни характеристического уравнения, А1,А2,В1,В2 — постоянные шия, которые определяются из начальных условий. 11 11 При переходный процесс определяются так: получается Tмi < 4 Тяi колебательным, 21 11 а функции = у + еаt(Cl cos t + C2 sin t), (27) и iЯ iЯ = IС + еаt(Dl cos t + D2 sin t), Здесь корни характеристического уравнения комплексно-сопряженными, т.е. равными а± j : =- 1 2Tяi = 1 2Tяi получаются 4Tяi 1 TMi Постоянные интегрирования С1,С2,D1,D2 находятся из начальных условий, для чего для каждой ступени при t=0 определяются соответственно iЯ и diя/dt, и d /dt При учете индуктивности цепи якоря L существует небольшой дополнительный интервал переходного процесса, который длится от момента замыкания контакта КМ1 (рис.1) до момента достижения тока в якоре значения IС. Время этого интервала определяется также, как и время трогания электромагнитных реле I1 tтр = Тяi ln I1 I c где величина Тяi соответствует той ступени, с которой начинается пуск. Для рассматриваемого примера Тяi = ТЯ2. Работа на ЭВМ типа IBM ведется в диалоговом режиме. Обозначения всех переменных соответствуют указанным в настоящих методических указаниях. Для утвердительного ответа на вопросы типа "Изменить исходные данные?" необходимо нажать клавишу <У>,для отрицательного ответа - клавишу <N>. Результаты расчетов (таблицы, графики) возможно выводить на экран, в виде файла или на принтер. ВТОРОЙ ПОДХОД К МОДЕЛИРОВАНИЮ Моделирование процесса разгона двигателя представляет собой достаточно трудоемкую задачу, так как исследуемая система имеет переменную структуру. Если для моделирования использовать MatLab, то при отключении каждого резистора математическая модель меняется и, переходя к новой модели, необходимо в качестве начальных условий использовать конечные условия предыдущей модели. Поэтому для моделирования процесса разгона была разработана специальная программ на языке Delphi «Разгон ДТП». Эта программа позволяет ввести все исходные данные в диалоговом режиме. В режиме динамического торможения задача легко решается с использованием MatLab. В режиме торможения математическая модель (1) приобретает вид: di L я ( R RT )iя k эм ; dt (11в) d J k эмiя M c . dt Или в матричной форме (12в) X AX BU , k RЯ RT эм 0 L L T где X (iя , ) ; U 1; A ; B M c . k эм 0 J J Для моделирования использовался математический инструментарий simulink. Структура модели программы приведена на рис. 1в. Окно модели для одного из конкретных вариантов заданий и полученные графики переходных процессов приведены на рис. 2в. Как уже было сказано, эти графики справедливы только до момента пересечения ими оси абсцисс. Рис. 1в. Структура модели программы Так как блок «State-Space» содержит математическую модель в расширенной форме Коши, то в окне параметров модели должны выть учтены и матрицы: 1 0 0 C ; D 0 . 0 1 Рис. 2в. Окно параметров модели и графики переходных процессов по скорости и току якоря при торможении, полученные в результате моделирования ХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХХ 7. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ОФОРМЛЕНИЮ КУРСОВОЙ РАБОТЫ Общие требования к оформлению курсовой работы определяются общими требованиями к текстовым документам (ГОСТ 2.105-91) и отчетам о научно-исследовательской работе (ГОСТ 7.32-92). Курсовая работа состоит из расчетной части и приложений в виде графиков переходных процессов, чертежей принципиальных электрических схем и другого вспомогательного материала. Курсовая работа выполняется на стандартных листах формата 11 (А4)-210х297мм от руки пастой (чернилами) синего, черного цвета или может быть напечатана. Структура курсовой работы: титульный лист; задание на курсовую работу; реферат; содержание; перечень сокращений, условных обозначений, символов, единиц измерения и терминов (не составляется, если повторение сокращений и др. менее трех раз); введение; основная часть; заключение; список литературы; приложения. Титульный лист должен содержать название университета, кафедры, дисциплины, тему курсовой работы, номер группы, фамилию и инициалы студента должность, фамилию, инициалы руководителя курсовой работы, город, год выполнения работы. Реферат должен содержать: сведения об объеме работы, количество иллюстраций, таблиц, приложений, использованных источников; ключевых слов, состоящий из 5 - 15 слов или словосочетаний из текста, которые в наибольшей мере характеризуют его содержание и обеспечивают возможность информационного поиска (ключевые слова приводятся в именительном падеже и печатаются прописными буквами в строку через запятые); текст реферата. Текста реферата должен отражать: объект исследования или разработки; цель работы; метод исследования и аппаратуру; полученные результаты и их новизну; основные конструктивные, технологические и технико-эксплуатационные характеристики; степень внедрения, рекомендации по внедрению или итоги внедрения; область применения; экономическую эффективность или значимость работы; прогнозные предположения о развитии объекта исследования. Во ведении отражается краткая оценка решаемой проблемы, актуальность темы, цель работы и обоснование необходимости ее проведения, желательно привести сведения о патентных исследованиях и выводы из них. Основная часть курсовой работы должна содержать: математическую модель электромеханической системы; принцип автоматического управления двигателя постоянного тока; определение дополнительных данных для расчета; расчет числа ступеней пуска; расчет сопротивлений резисторов при пуске и торможении; упрощенный расчет переходных процессов; расчет переходных процессов на ЭВМ; разработку схемы автоматического пуска и торможения. Основная часть излагается в виде сочетания текста, иллюстраций таблиц и делится на разделы, пункты или разделы, подразделы и пункты. Заключение должно содержать технико-экономические показатели, краткие выводы по результатам работы и практические предложения по их использованию, обоснование целесообразности продолжения работ в этом направлении. Все источники, использованные при выполнении работы, сводятся в общий пронумерованный список и располагаются в последовательности упоминания их в тексте или по алфавиту. Например, пособие: 4. Москаленко В.В. Автоматизированный электропривод. - М: Высшая школа, 1986. - 320 с, ил. Приложения содержат материалы, которые по каким-либо причинам не могут быть включены в основную часть (таблицы, иллюстрации вспомогательного характера, акты внедрения и т.п.). Печатный вариант курсовой работы должен быть набран в текстовом редакторе Word for Windows (Word 7.0 и выше). Формат страниц А4; все поля (верхнее, нижнее, левое, правое,) - 2см; межстрочный интервал - одинарный; основной шрифт ( кегль) - 14 пт; шрифт Times New Roman Cyrillic; красная строка ( отступ ) - 0,75 см; колонтитулы ( верхний и нижний ) - 1,75 см, Формулы набираются в редакторе Microsoft Equation. Текст должен быть распечатан на белой бумаге. Электронный вариант приложений к курсовой работе представляется на дискете 3,5 дюйма в файловом виде. При оформлении работы для удобства анализа результатов, выполненных при расчете сопротивлений резисторов при пуске и торможении, упрощенном расчете переходных процессов, необходимо составить таблицу, аналогичную табл. 2, которая дана для случая, когда m = 2. Таблица 2 Ступень Анализ основных параметров Rяi Tмi Tяi Переход уi процесс 2 А 1 А нач i tНi К 0 Динамич. торможение Ранее указывалось, что при расчете вручную принимают Тяi 0, однако для анализа качества переходных процессов электромагнитные постоянные времени должны быть вычислены для каждой ступени по формуле (12) и занесены в табл. 2. Здесь же указывается вид переходного процесса: например, апериодический (А) или колебательный (К). Определение вида переходного процесса производится при помощи неравенств (26), (27). Результаты расчета токов и частоты вращения при пуске заносятся в таблицы, аналогичные табл. 4. Значения IЯ И для каждой пусковой ступени и при динамическом торможении рассчитываются не менее, чем для пяти точек. В табл. 3 время t - это время от начала пуска на соответствующей ступени, tTEK - текущее время от начала пуска двигателя. На основании табл. 3, 4 строятся графики: iя=fl(t), = f2(t), как это показано на рис. 3, 4. При расчете на ЭВМ заполняются такие же таблицы. Для определения фронта нарастания тока и максимального тока при апериодическом процессе сначала принимают минимальный шаг по времени (0,001с), а затем этот шаг может быть увеличен до значения tшi t Иi 8 12 При колебательном переходном процессе желательно выбрать небольшой шаг по времени (0,001-0,005с), но в табл. 3 заносятся не все значения iя и , а лишь те, которые необходимы для построения графиков тока и частоты вращения. Зависимости iя, и от времени, полученные на ЭВМ, строятся на тех же графиках, которые были рассчитаны вручную. При работе на ЭВМ следует определить суммарное время переходного процесса и при большем значении m. Для этого нужно принять значение тока больше, чем указано в формуле (2). При расчете времени динамического торможения нужно поэкспериментировать с величиной RT, т.е. сначала принимается величина согласно (10), а затем это сопротивление увеличивают в 1.5-2 раза. Таблица 3 Пуск двигателя T Tтек iя 2-я ступень 0 … 1-я ступень 0 … 0-я ступень 0 … Таблица 4 Динамическое торможение t iя Для разработки схемы пуска и динамического торможения двигателя необходимо предварительно ознакомиться с литературой, в которой приводятся принципиальные электрические схемы автоматического управления двигателями постоянного тока, например, [2,3]. Далее по аналогии разрабатывается схема автоматического пуска и динамического торможения при расчетном значении m. Эта схема и описание ее работы должны быть приведены в курсовой работе. Обозначения элементов принципиальной электрической схемы должны соответствовать ГОСТ 2.721-74-2.758-81 (условные графические обозначения в схемах). В разделе "Заключение" необходимо обязательно указать: 1. Погрешность расчета "вручную", т.е. без учета индуктивности якорной обмотки, по сравнению с расчетом на ЭВМ. 2. Влияние числа ступеней m на суммарное время переходных процессов при пуске. 3. Влияние сопротивления резистора торможения Rт на время переходных процессов при динамическом торможении. Остальное приводится по усмотрению исполнителя в соответствии с рекомендациями ГОСТ. Литература 1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. –М.: Высшая школа, 1986.-335с. 2. Васильев Д.В. и др. Проектирование и расчет следящих систем. - Л.: Судостроение, 1964.-396с. 3.Москаленко В.В. Автоматизированный электропривод. М.: Энергоатомиздат, 1986.-320с. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Методические курсовой работы указания к выполнению Составили: ФОМИН Альберт Иванович БАРЦЕВА Людмила Александровна Рецензент Редактор Лицензия ЛР № 020271 от 15.11.96 Подписано в печать 27.12.00 Формат 60x84 1/16 Бум. тип. Усл.-печ.л. 1,16(1,25) Уч.-изд.л 1,25 Тираж 100 экз. Заказ 5- Т5 Бесплатно Саратовский государственный технический университет 410054 г. Саратов, ул. Политехническая, 77 Копипринтер СГТУ, 410054 г. Саратов, ул. Политехническая, 77 МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАФЕДРА ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ И ИНФОРМАТИКИ КУРСОВАЯ РАБОТА по дисциплине «Технические средства автоматизации и управления» Тема работы: «Управляемый разгон двигателя постоянного ток» Выполнил Студент гр. УИТ-41 Проверил Ассистент каф. ТКИ Барцева Л.А. Саратов 2011 РЕФЕРАТ Объем работы 16 страниц, она содержит 7 рисунков, 3 таблицы, 26 формул. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА , РАЗГОН, ТОРМОЖЕНИЕ, СИСТЕМА УПРАВЛЕНИЯ, КОММУТАЦИЯ, ДОПОЛНИТЕЛЬНЫЕ РЕЗИСТОРЫ, СЕМИСТОРЫ, МИКРОПРОЦЕССОР, ТОК ЯКОРЯ. В работе рассматривался автоматизированный пуск двигателя постоянного тока при условии ограничения тока якоря. Исходя из упрощенной модели процесса было рассчитано сопротивление пусковых резисторов, время этапов пуска и угловые скорости якоря на соответствующих этапах. Результаты расчетов были проверены математическим моделированием, исходя из более полной модели объекта. Разработана принципиальная электрическая схема системы автоматического управления пуском. 1. ВВЕДЕНИЕ И ПОСТАНОВКА ЗАДАЧИ Двигатели постоянного тока независимого возбуждения наиболее часто используются в системах автоматики так как они очень просты в управлении и имеют привлекательные с точки зрения разработчика механические характеристики. Однако при подключении двигателей постоянного тока средней и большой мощности к источнику питания могут возникнуть проблемы, так как в момент включения ток якоря ограничивается только активным сопротивлением якоря. Сопротивление якоря двигателя довольно мало, поэтому ток в момент включения достигает очень больших значений и может вывести из строя сеть, источник питания, да и сам двигатель. В самом деле, с достаточно высокой точностью математическую содель двигателя постоянного тока можно представить в виде [ 4 ]: di L я U Riя C1 ; dt (1) d J C2iя M Т M НГ . dt где L - индуктивность якоря; iя - ток якоря; R - активное сопротивление цепи якоря; - угловая скорость якоря; J - приведенный момент инерции якоря; M Т - момент трения в коллекторе и подшипниках; M НГ . - момент нагрузки; C1 , C2 - постоянные коэффициенты, определяемые конструкцией данного двигателя; U – питающее напряжение. Моменты трения с достаточной точностью можно считать изменяющимся по закону: 0, если 0; MТ * (3) M const , если 0 . Т Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде: 0, если 0; M НГ * (2) M const , если 0 . НГ Первое уравнение системы (1) описывает динамику электромагнитных процессов в двигателе, второе – электромеханические. В уравнениях (1) это приводит к тому, что правая часть второго уравнения будет отлична от нуля только, если выполняется условие: * C2iя M Т* M НГ . (4) Коэффициенты С1 , С2 имеют совершенно различную размерность, но обычно они очень близки по модулю, поэтому в дальнейшем будем называть их единым электромагнитным коэффициентом и обозначать k ЭМ . Так как электромагнитные процессы в якоре протекают на порядок быстрее электромеханических, то при включении двигателя в сеть через diя 0 , а угловая скорость не успеет dt увеличиться и 0 . Поэтому в первый момент после включения ток якоря будет определяться выражением: U (5) iя . R Естественно, если R Rя - активному сопротивлению якоря, которое очень мало, то ток может достигать очень больших значений. Поэтому при запуске двигателей постоянного тока средней и большой мощности последовательно с якорем подключают один или несколько резистров, последовательно отключая их при достижении якорем определенных оборотов. То есть (6) R Rя R Д 1 ....R Дn . Для этого применяют схему, которую обобщенно можно представить, как показано на рис. 1. очень короткий промежуток времени Рис. 1. Часть принципиальной электрической схемы пуска и динамического торможения двигателя постоянного тока В настоящее время в качестве контактов К1.1 и К1.2 применяются электронные элемент, в частности семисторы, а управление ими осуществляется с помощью микропроцессоров. Резистор RT , и контакт КМ1.1 используются для ограничения тока при динамическом торможении двигателя. Цель работы: 1. Рассчитать количество и сопротивление дополнительных резисторов включаемых в цепь якоря при разгоне и торможении, исходя из выполнения условия: i я (2 : 3) I ЯН , (7) где I ЯН - ток якоря при номинальном моменте нагрузки. 2. Рассчитать параметры переходных процессов пуска и торможения, используя упрощенную математическую модель двигателя. 3. Проверить параметры переходных процессов методом математического моделирования на ЭВМ. 4. Разработать обобщенную электрическую принципиальную схему системы управления пуском двигателя и описать ее работу. Исходные данные: Таблица 1. № вариа нта 30 Тип двигат еля МИ-32 Номиналь ная мощность навалу, Вт Номиналь ное напряжен ие, В Номиналь ный ток якоря, А Номиналь ная частота вращения , об/мин Сопротивл ение якоря, Ом Индуктивн ость якоря, ·10-3, Гн Отношени е момента сопротивл ения к моменту нагрузки, % α Схема управле ния L Моме нт инерц ии якоря, 10-3, кг/м2 J P2Н UН I ЯН nН Rя 450 110 5,0 1500 0,605 4,5 13,25 55 Т 2. РАСЧЕТ ДОПОЛНИТЕЛЬНЫХ РЕЗИСТОРОВ По исходным данным определяют используются в дальнейшем расчете: ряд величин, которые 4. Номинальная угловая скорость вращения 1 nH = 157 . 30 с H = 5. Единый электромагнитный коэффициент эм = U H RI Я H H = 0,681 В с 3. Номинальный электромагнитный момент Мн = kЭМIЯН = 3,4 Н м 4. Номинальный момент на валу двигателя Р2Н М2Н = = 2,87 Н м 5. 6. H Момент потерь М0 = МН - М2Н = 0,54 Н м Полный момент сопротивления а М 2 H М 0 =2,12 Н м 100 Ток якоря, соответствующий моменту сопротивления Мс I c = М c = 3,11 A k эм Мс = 7. 8. Угловая скорость вращения двигателя при токе I c c UН RI с = 158,68 kЭМ 1 с . Рассчитаем число степеней пуска. Эта величина определяется максимальным и минимальным токами (I1, I 2) при замыкании накоротко пусковых резисторов. Согласно [3, 5]: I1=3·IЯН=15,0 [A], (8) I2=1,2·Iс=3,73 [A] (9) При аналитическом расчете число ступеней m определяется соотношением [3, 5]: m = (lnIn/I1)/(lnI1/I2), (10) где In - величина максимального пускового тока при отсутствии добавочных резисторов In UH = 181,82 [A]. R (11) Подставляя в (10) численные значения параметров, получим m= 1,80 Округлим найденное значений m в большую сторону до целой величины, получим: m= 2 Следовательно, система управления пуском будет содержать два дополнительных резистора. На первой ступени: RЯ1 =R + RД1, (12) где добавочное сопротивление RД1 определяется так: I1 1 RЯ =1,83 [Ом]. I2 RД1 = Соответственно RЯ1 =2,43 [Ом]. На второй ступени RЯ2 = R + RД1 + RД2 (7) где I1 RД2 = I 2 1 (R + RД1)=7,36 [Ом]. Соответственно RЯ2 =9,79 [Ом]. При определении сопротивления резистора для динамического торможения RТ исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I1. Поэтому k RT эм c R =6,60 [Ом] (10) I1 3. УПРОЩЕННЫЙ РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ И ДИНАМИЧЕСКОМ ТОРМОЖЕНИИ При упрощенном расчете будем использовать упрощенную математическую модель переходного процесса, в которой предполагается, что электромагнитные переходные процессы быстро заканчиваются и не влияют на электромеханический ]5]: di i я I yi , dt Tm i (11) где Tmi=RяiJ/k2эм (12) Электромеханическая постоянная времени двигателя на i-ом шаге разгона. На первом этапе разгона этапе разгона будем иметь Tm1=(Rя+RД1 +RД2) J/k2эм=0,28 [с]. (13) На втором этапе разгона этапе разгона будем иметь Tm2=(Rя+RД1) J/k2эм=0,07 [с]. (14) На завершающем этапе разгона будем иметь Tm0=RяJ/k2эм=0,017 [с]. (15) Решение уравнения (11) имеет вид: iя= Iуi 1 e t / T + Iнач I e t / T Mi Mi где Iнач i - начальное значение тока на i-й ступени. В данном случае для всех ступеней Iуi = Ic Iнач i = I1 Этому для каждой ступени ток iяi определяется уравнением (16) t / T Mi iяi = Iс 1 e t / TMi + I1 e (16) На основании (16) время tui, в течение которого ток в якоре уменьшается на i-й ступени, определяется так: I 1 Ic . I 2 Ic (17) I 1 Ic =0,82 [с]. . I 2 Ic (18) tui = Тmiln Тогда на первой стадии разгона: tu1 = Тm1ln Тогда на второй стадии разгона: tu2 = Тm2ln I 1 Ic =0,21 [с]. . I 2 Ic При пуске двигателя по естественной характеристике Tио 3Тмо=0,05 [с], , где Тмо = RJ / k2эм Здесь ток якоря уменьшается от I1, до Ic. (19) Для исследования переходных процессов по скорости будем использовать упрощенную математическую модель [5]: Tмi d = уi (20) dt где уi – установившаяся частота вращения двигателя на i-й ступени. Решение этого уравнения имеет вид: t / T (21) = уi 1 e Mi + нач i e t / TMi где нач i - начальная частота вращения на i-й ступени. Каждой ступени при определении соответствует не только свое значение Tмi, но и свои значения начальной и установившейся величин частоты вращения ( нач i , уi ). На первом этапе пуска нач 2 = 0; у2 = с2, где с2 = U H Rя2 I c = 143,96 [1/с] . k эм k эм На втором этапе пуска нач 1 = у2 = 143,96 [1/с]. Конечная скорость на втором этапе U H R я1 I c =154,76 [1/с]. у1 = с1 = k эм k эм где величина RЯ1 определяется уравнением (6). При пуске по естественной характеристике (нулевая ступень): нач 0 = у1 = 154,76 [1/с]. Рассмотрим теперь переходные процессы в режиме динамического торможения. Для реализации этого режима якорь двигателя отключается от сети и замыкается на резистор RT, а обмотка возбуждения остается под напряжением, Если считать, что индуктивность якорной обмотки равна 0, то при этом переключении ток в якорной цепи скачком изменяется от IС до IТ (рис. 2), где IТ - величина отрицательная. Рабочая точка перемещается с естественной характеристики 1 на характеристику динамического торможения 2. Далее величины IЯ И уменьшаются до нуля. Если бы после достижения равенства = 0 момент сопротивления не изменил своего знака и оставался постоянным по модулю, то двигатель изменил бы направление вращения и достиг частоты т при токе iя = ic, где т = RT I C kЭМ (22) Рис. 2. Скоростные характеристики двигателя постоянного тока Однако, после достижения частоты вращения = 0 момент сопротивления меняет свой знак т.е. двигатель останавливается. Ранее указывалось, что при выполнении этой курсовой работы момент нагрузки представляет собой момент сухого трения. Для определения тока якоря во время динамического торможения можно воспользоваться уравнением (15), приняв: Iуi = Iс ; Iнач = IТ При этом получим: iя =Ic(1 – е-t/Tmg) + IТ е-t/Tmg (23) где Тmд = Rят2 J ; Rят = RТ + R. k эм Для определения изменения в процессе торможения можно использовать уравнение (20), приняв уi = T; нач i = c При этом получаем -t/T -t/T = T(1 – е mg) + c е mg динамического (24) Уравнения (23), (24) справедливы до достижения = 0. Учитывая, что в конце динамического торможения = 0, на основании (24) можно определить время динамического торможения tT = Тmдln 1 c , t (25) где T - величина отрицательная. Для нашего случая будем иметь: т = RT I C = -30,11 [1/с]. ; Rят = RТ + RЯ= 7,2 [Ом]. ; Тmд = Rят2 J = 0,21 [c]. k эм kЭМ tT = Тmдln 1 c = 0,38 [c]. . t Результаты расчетов сведены в табл. 2 Таблица 2 Анализ основных параметров Tмi ti начi уi Ступень RДi 2 7,36 0,28 0,82 0 143,96 1 1,83 0,07 0,21 143,96 154,76 0 0 0,017 0,05 154,76 158,68 0,21 0,38 158,68 0 Динамич. 6,60 торможение 4. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ НА ЭВМ Моделирование динамики разгона и торможения двигателя постоянного тока производилось с использованием полной модели (1) и программы «Разгон», созданной в среде MatLab. На рис.3, рис.4 приведены экранные формы программы и результаты моделирования. Рис. 3. Экранная форма программы «Разгон» Рис. 4. Графики переходных процессов по току и скорости при разгоне Из результатов моделирования следует, что теоретически рассчитанные параметры процесса разгона совершенно не соответствуют полученным при моделировании на более полной модели. Это объясняется крайне неудачной методикой выбора сопротивления резисторов. В режиме торможения математическая модель (1) приобретает вид: di L я ( R RT )iя C1; dt (26) d J C 2 iя M c . dt Или в матричной форме (27) X AX BU , k эм RЯ RT 0 L L T где X (iя , ) ; U 1; A ; B M c . k эм 0 J J Для моделирования использовался математический инструментарий simulink. Структура модели программы приведена на рис. , Окно модели и полученные графики переходных процессов приведены на рис. . Как уже было сказано, эти графики справедливы только до момента пересечения ими оси абсцисс. Рис. 5. Структура модели программы Рис. 6. Окно параметров модели и графики переходных процессов по току и скорости при торможении, полученные в результате моделирования Из результатов моделирования следует, что теоретически рассчитанные параметры процесса торможения с точностью до ±10% соответствуют полученным при моделировании на более полной модели. 5. РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ Система автоматического управления пуском двигателя постоянного тока состоит из силовой части, включающей резисторы R1, R2 и системы управления ими, включающей резистор R4, транзисторы VT1, VT2 и микропроцессор М, импульсный датчик ИД. Сопротивление резистора R4 выбирается на порядок меньше сопротивления обмотки якоря, поэтому он не влияет на разгонные характеристики двигателя, но падение напряжения на нем пропорционально току якоря. Поэтому этот резистор может играть роль датчика тока якоря. Система может управлять пуском двигателя как по току, по времени и по скорости. В первом случае при замыкании пусковой кнопки К1, микропроцессор начинает измерять ток якоря, снимаемый с резистора R4. при достижении тока I1, микропроцессор подает сигнал, включающий оптрон семистора S2 через усилитель мощности на транзиcторе VT2, который замыкает резистор R2. При повторном достижением тока якоря значения I1, микропроцессор замыкает симистор S1. На этом процедура разгона заканчивается. Во втором случае при замыкании кнопки К1 процессор начинает отсчитывать время и по достижении необходимых моментов последовательно включает семисторы S2, S1. Во втором случае при угловая скоротсь вращения двигателя измеряется импульсным датчиком ИД. Процессор обрабатывает информацию, и при достижении необходимой скорости последовательно включает семисторы S2, S1. Вид работы системы определяется программой процессора. Рис. 7. Электрическая принципиальная схема системы управления Спецификация к электрической принципиальной схеме Таблица 3 Обозначение на схеме R1 R2 R4 R5 R6 R7 R8 R9 R10 VT1 VT2 S1 S2 M ИД Спецификация Номинал Тип 10 КОм 10 КОм 10 КОм 200 Ом 200 Ом 2Т312А 2Т312А BTB24-600BWRG BTB24-600BWRG Микропроцессор, MQWM 356728GD Импульсный датчик угловой скорости ИДМ-256 А ВЫВОДЫ 1. 2. 3. 4. Рассчитаны дополнительные резисторы, обеспечивающие пуск и торможение двигателя постоянного тока из условия ограничения пускового тока. Произведен расчет параметров пускового процесса по времени и скорости, исходя из упрощенной модели. Параметры переходного процесса проверены методом математического моделирования на более полной модели, они показали совпадение с расчетными с точностью ±10% при торможении и полное несовпадение при разгоне. Разработана электрическая принципиальная схема автоматизированной системы управления пуском. Литература 1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. –М.: Высшая школа, 1986.-335с. 2. Васильев Д.В. и др. Проектирование и расчет следящих систем. - Л.: Судостроение, 1964.-396с. 3. Москаленко В.В. Автоматизированный электропривод. М.: Энергоатомиздат, 1986.-320с. 4. Брускин Д.Э., Зорохович А.Е., Хвостов А.С. Электрические машины и микромашины. М.: Высшая школа, 1971.- 430 с. 5. Фомин А.И., Барцева Л.А. Автоматизация управления двигателем постоянного токаю Метод. указ.. Саратов.: СГТУ, 2000. -17 с.