Создание автоматической системы управления оружием мобильного робототехнического
advertisement

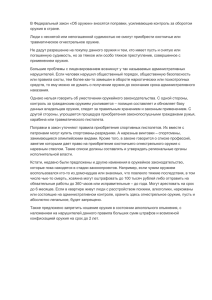
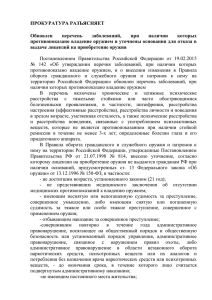
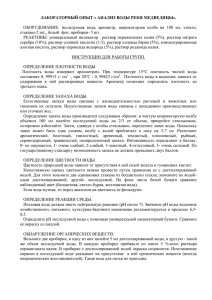
Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Рубцов И.В. Саламаха П.Н. Постановка задачи исследования Постановка задачи Зона ответственности исследования Система технического зрения Структура и состав исследуемой системы Критерии качества исследуемой системы Тракт обработки радиолокационной информации Подсистема наведения и стабилизации оружия Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана Цели Мобильный робототехнический комплекс Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Рубцов И.В. Саламаха П.Н. Обобщенная структура автоматической системы управления оружием Постановка задачи исследования Структура и состав исследуемой системы Критерии качества исследуемой системы Тракт обработки радиолокационной информации Подсистема наведения и стабилизации оружия Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана Внешняя среда Вектор коородинат цели Z Система технического зрениня Вектор оценок коородинат цели Z Подистема наведния и стабилизации оружия Механическое воздействие Состав перспективной многоканальной системы технического зрения тепловизионный канал (3 – 5 мкм); оптико-электронный канал (8 – 12 мкм); телевизионный канал; радиолокационный канал миллиметрового диапазона; Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Рубцов И.В. Саламаха П.Н. Постановка задачи исследования Структура и состав исследуемой системы Критерии качества исследуемой системы Тракт обработки радиолокационной информации Подсистема наведения и стабилизации оружия Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана Общий критерий качества автоматической системы управления оружием Вероятность поражения цели неуправляемым снарядом Pп 1 1 2 пр , где 2 пр 2 стз 2 суо 2 п R 2 эф Критерии качества связанные с радиолокационным каналом системы технического зрения Вероятность ложного обнаружения w(X H0 ) F P( X X 0 H 0 ) w( X H 0 )dX w( X H1) D X0 Вероятность правильного обнаружения D P( X X 0 H1 ) w( X H1 )dX X0 0 X0 F q X Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Тракт обработки информации когерентного радиолокационного канала Рубцов И.В. Саламаха П.Н. Постановка задачи исследования От приемнопередающего тракта U i Корреляционнофильтровая обработка X n Формирование X решающей статистики n Принятие решения Структура и состав исследуемой системы Подсистема наведения и стабилизации оружия Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана Матрица обнаружения X0 Критерии качества исследуемой системы Тракт обработки радиолокационной информации Вектор оценок Измерение коородинат цели Z вектора координат Z Оценка дисперсии помехи N Формирование порога (при фикрированной F) Корреляционно-фильтровая обработка N 1 X n w(i) U i e j 2 n i N i 0 Методы измерения скорости и дальности метод дискриминационных характеристик метод «центра масс» Методы измерения углов места и азимута метод дискретного сканирования метод конического сканирования ДН антенны r V Подматрица сопровождения Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Рубцов И.В. Саламаха П.Н. Структура подсистемы наведения оружия Вектор оценок коородинат цели Z Постановка задачи исследования Синергетический регулятор Задание на момент Регулятор момента Объект Структура и состав исследуемой системы Критерии качества исследуемой системы Тракт обработки радиолокационной информации Основные этапы синтеза синергетического регулятора методом АКАР вывод динамической модели объекта с помощью уравнения Лагранжа d L второго рода: dt q i L qi i x k (t ) f ( x ...x , M , g ) и запись этой модели в форме Коши: 1 n k k Подсистема формирование многообразия (макропеременной), отражающего цель управления: наведения и стабилизации оружия n ( X ) f ( X ) xn xn _ зад Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана формирование функционального уравнения, описывающего поведение системы на многообразии: T * n ( X ) n ( X ) 0 , тогда через t (3 5)Tn , n ( X ) 0. n решение функционального уравнения относительно управляющего воздействия Mn: Создание автоматической системы управления оружием мобильного робототехнического комплекса на базе системы технического зрения Пример синтеза синергетического регулятора методом АКАР и результаты моделирования Рубцов И.В. Саламаха П.Н. Постановка задачи исследования Объект управления башня +пушка в горизонтальной плоскости Уравнение Лагранжа второго рода: x1* (m б * L2б m1 * L2m m 2 * L2p ) Структура и состав исследуемой системы X 0 Y1 Lц 1 m1 Lб Критерии качества исследуемой системы L1 0 ц mб Многообразие : 1 x1 з1 Функциональное уравнение второго порядка: T2 * 1 T1 * 1 1 0 Выражение для момента M1: L2 m2 X1 0.1 0.05 Подсистема наведения и стабилизации оружия 0 0 0.2 0.4 0.6 0.8 Пример синтеза синергетического регулятора CМ-7 МГТУ им. Н.Э. Баумана 1 1.2 1.4 1.6 1.8 t x 10 m2 * L2p m1 * L2m mb * L2b T2 0 0 0.2 0.4 0.6 0.8 1 t 1.2 1.4 1.6 1.8 * x1 T L m * m1 L p * m2 * sin( x1 ) * x 4 m2 * L2p m1 * L2m mb * L2b * 1 * x2 T2 L m * m1 L p * m2 * cos( x1 ) * x3 m2 * L2p m1 * L2m mb * L2b * з1 T2 5 -5 M1 M1 4 10 y1* x1* sin( x1 ) * (m1 * L m m 2 * L p ) M1 ; Y Тракт обработки радиолокационной информации y1* cos( x1 ) * (m1 * L m m 2 * L p )