Иванюк
advertisement

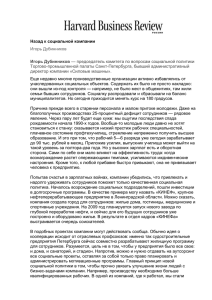
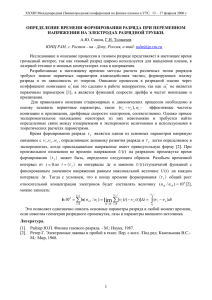
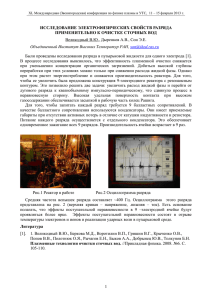
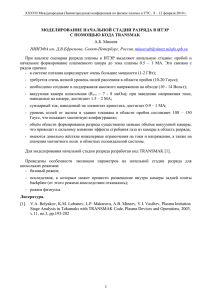
Институт проблем управления РАН им. Трапезникова РАЗРАБОТКА МНОГОФАКТОРНОЙ СИСТЕМЫ ПРОГНОЗИРОВАНИЯ ДЛЯ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ СИСТЕМАМИ Иванюк В.А., Цвиркун А.Д. Целью данной работы является построение инновационной, самообучающейся вычислительной системы для комбинированного многофакторного анализа и прогнозирования с использованием косвенных данных и учетом явлений, влияющих на исследуемый показатель, способной самостоятельно собирать исходные данные, выявлять основные аналитические факторы и рассчитывать их весовые и прогностические коэффициенты Благодаря тому, что в системе будет применен инновационный метод анализа и прогнозирования данных, на основе генетического алгоритма система в отличие от аналогов сможет выдавать экономическую оценку и прогнозы, не только с более высокой точностью, чем её существующие аналоги, но и будет работоспособна уже после первых этапов обучения в отличие от существующих аналитико-прогностических систем, требующих длительного предварительного сбора и анализа данных с последующим обучением Схема системы: Сборщик данных Сборщик данных Сборщик данных Сборщик данных Сборщик данных Хранилище данных Блок нейронного анализа Блок статистического анализа Модуль управления самообучающимися статистическими и нейронными алгоритмами и модификации данных Блок нейронного прогноза и самообучения Блок статистического прогноза и самообучения Генетический алгоритм Синтез прогноза Анализ ситуации РЕЗУЛЬТАТЫ АНАЛИЗА РЕЗУЛЬТАТЫ ПРОГНОЗА Рассмотрим основные структурные элементы системы: Одним из основополагающих элементов системы является блок статистического прогноза и самообучения В данном блоке реализованы следующие статистические методы прогнозирования: 1. Линейное прогнозирование; 2. Прогнозирование методом исторических аналогий; 3. Прогнозирование на основе корреляционно - регрессионного анализа. Рассмотрим применение метода КРА на конкретном примере анализа и прогнозирования поведения двух выборок: Пусть нам известно дальнейшее прогнозируемое поведение выборки В. Пусть имеются две выборки, предположительно Необходимо произвести прогнозирование выборки А, Очевидно, что в данном случае использование стандартных методов Произведя смещение ряда А относительно В можно построить коррелирующие друг другом на результат, определенном выявления зависимости даст с некачественный поскольку которая каким-то образом (не явно), с временной верное уравнение линейной регрессии уравнение линейной регрессии будет основано на рядах со слабой промежутке времени задержкой коррелирует с выборкой В. корреляцией F(t) F(t) В А В t А t Следующим элементом интеллектуальной системы прогнозирования является блок нейронного прогноза и самообучения Рассмотрим практическое применение нейронной сети на простейшем примере аппроксимации нелинейной зависимости набора эмпирических данных При этом фактически известны только входные аргументы и выходные значения функции, но тип зависимости не выявлен Далее будем рассматривать аппроксимацию функции вида: F(x1…..xn) = f(x1)+ f(x2)+…..+ f(xn) Для оптимизации данной функции по известным значениям известных входов и выходов построим нейронную сеть из n+1 нейронов При этом входы сети будут соответствовать аргументам функции, а выход конечного нейрона её значению х1 х2 F(х1…хn) … хn Поскольку влияние каждого из аргументов на функцию в целом не известно необходимо ввести весовые коэффициенты, которые позволят ослаблять или усиливать влияние аргументов на результат функции а1 х1 а2 х2 … … аn хn k1 k2 F(х1…хn) … kn Таким образом, функция приобретает вид F(x1…..xn) = k1f(x1)+ k2f(x2)+…..+ knf(xn) Поскольку не известен тип функции f1,f2…fn необходимо ввести дополнительные коэффициенты, смещающие начальные значения аргумента на тот или иной участок сигмоиды, что позволит приблизить наблюдение результатов нейронов первого уровня к определенному виду fх = n х fх = а·х fх = хn При этом Таким образом за счетокончательный введения коэффициента вид функции a можно для аппроксимации использовать следующий: функцию рациональной сигмоиды единую для всей нейронной сети. (k 1 x1 ) a2f(k2x2)+…..+ a 2 (k 2 x 2 ) ... anf(knxn) a n (k n x n ) F(x1…..xn)== аa1f(k1x1)+ F(х1…хn) 1 Следующим элементом интеллектуальной системы прогнозирования является генетический алгоритм Следует иметь в алгоритм виду, что ряд- функции Генетический это нескольких алгоритм переменных специально может иметь более одного оптимума, то есть содержать разработанный решения для быть задач, сущность вкоторых Так функция двух для переменных может представлена виде несколько экстремумов, – иначе множество решений. Такие заключаетсяв трехмерном в нахождении оптимума (оптимизационной) поверхности пространстве функции функции называются по более чемполимодальными. одному фактору. При этом они могут быть представлены в n+1предназначенный мерном Или иначе сложными говоря –фигурами алгоритм, для пространством, где n – количество оптимизации функций нескольких переменных переменных.(аргументов функций). F х y Задачи оптимизации подобного рода функций могут быть решены при помощи двух подходов: Основной задачей модификации данного метода явилось увеличение репрезентативности (точности) случайной выборки При этом чем больше выборка аргументов, тем более высока 1 подход. 2 подход. Метод Заключается полного перебора в ограниченном значений функций количестве для аргументов в областях возможных оптимумов с целью вероятность нахождения правильного решения (или увеличения искомого всех возможных сравнений, значений существующих функций или для допустимых случайной выборки значений точности вычислений. оптимума). Данный метод был усовершенствован Холландом в аргументов.и по аргументов Данный сути своей метод является применим стохастическим. за ограниченное Применим Результатом явился метод, заключающийся в том, что чем ближе 1975 г. по аналогии с эволюционными процессами, количество на множестве времени рациональных исключительно чисел (R аргументов). за пределами множества к происходящими оптимуму функции находятся значения выборки в природе, и стал известенслучайной как генетический рациональных чисел. аргументов, алгоритм. тем больше последующих случайных выборок производятся в их окрестности Сущность генетического алгоритма заключается в имитации процесса эволюции особей одного вида животных в замкнутом пространстве, в результате выживают наиболее приспособленные. Достоинства генетического алгоритма: 1. Высокая скорость нахождения решения в сравнении с другими стохастическими методами. 2. Достаточно низкая вероятность нахождения неверного решения (западание в локальный оптимум). 3. Четкая ограниченность точности по времени в зависимости от необходимой точности вычислений. В генетическом алгоритме используют ряд специфических терминов, привнесенных из биологии. Будем рассматривать генетический алгоритм больше с математической точки зрения как типовой метод многофакторной оптимизации функции с несколькими переменными. Терминология генетического алгоритма: Рассмотрим простейшую многофакторную функцию вида F(x1,x2….xn)=f1(x1)*f(x2)….f(xn) Ген – соответствует одному из аргументов функции – один аргумент (x1) или (x2) или (x3) и т.д. Особь – это полный набор аргументов с помощью которой выражается наша функция (x1,x2….xn), причем значения аргументов выбираются случайно. Популяция – это набор особей X2 X3 …. Xn 1. особь X1 X2 X3 …. Xn 2. особь X1 X2 X3 …. Xn 3. особь X1 X2 X3 …. Xn 4. особь X1 X2 X3 ….. Xn 5. особь X1 Терминология генетического алгоритма: Критерии выживания или иначе его приспособленность – это величина расстоянию до искомого оптимизации функции). Ï 1 FÈÑÊÎÌÀß Fîñîáè ~ оптимума (или называют обратная критерии 1 , F где F расстояние до искомого оптимума. В случае оптимизации функции неизвестному значению критерия F, Fискомое будет являться наилучшим случайно найденным min или max функции. Отсев или вымирание – это удаление из популяции с наименьшим критерием выживания(П). Терминология генетического алгоритма: Мутация – это случайные изменения случайного выбранного гена у случайной выбранной особи. Кроссовер – это операция, при которой из генов двух случайно выбранных родителей создается особь – потомок, помещающийся на место, освободившейся после смерти особи. Ограничение времени работы генетического алгоритма может быть реализована тремя различными способами: 1 способ – временное ограничение; 2 способ – количественное ограничение циклов эволюции; 3 способ – способ естественной убыли – смертность превышает рождаемость. Основным недостатком генетического алгоритма является то, что при программировании задачи невозможно создать универсальный код, описывающий функцию и критерий выживания, поскольку начальные условия задач всегда различны. Генетический алгоритм чаще всего применяют для поиска решений систем сложных уравнений со многими переменными, поиска оптимума сложных функций со многими переменными, а также для быстрой аппроксимации эмпирических данных, предполагаемой функции нескольких переменных. В разработанной интеллектуальной системе в базе собранных данных существует ряд искусственно введенных признаков (индивидуальные и групповые номера) для тех или иных групп данных и функций, а также указывается их текущее жизненное состояние (вероятность выдачи достоверного прогноза). Генетический алгоритм в системе нацелен прежде всего на уборку мусора в данных и на выявление наиболее жизнеспособных особей среди данных, функций и методов анализа. В зависимости от жизнеспособности (вероятности достоверного прогноза) особи, на её обработку будет выделяться большее количество ресурсов (процессорного времени), что позволит оптимизировать и ускорить вычисления в системе, и соответственно, получить наиболее достоверный прогноз и более точные результаты анализа. Таким образом, в результате применения инновационного подхода к задачам прогнозирования была разработана интеллектуальная система на основе методов искусственного интеллекта и статистики, позволяющая получать достоверный прогноз Спасибо за внимание