89441_2
advertisement

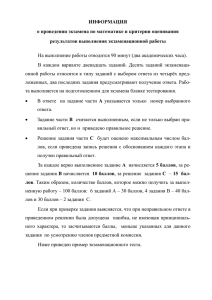
Уравнения статора и ротора в статическом режиме ( xy ) ( xy ) d ( xy ) ( xy ) 1 u r i j 1 11 1 1 1 L1 i1 Lm im 1 m dt ( xy ) 2 L2 i2 Lm im 2 + m 0 r i ( xy ) d 2 j ( xy ) 2 2 2 2 dt u1 i1r1 j11 i1 r1 j1 L1 im j1 Lm i1 r1 jx1 im jxm 0 i2 r2 j2 2 i2 r2 js1 L2 im js1 Lm i2 r2 jsx2 im jsxm u1 i1 r1 jx1 jim xm 0 i2 r2 / s jx2 jim xm u1 i1r1 ji1 x1 e1 e2 i2 r2 / s ji2 x2 Схемы замещения и векторная диаграмма АД Уравнения электромеханической и механической характеристик U1 I2 r1 c1r2 / s 2 xê2 P2 M m1 I 22 r2 ; I 2 U1 r12 xê2 ; I 2max U1 xê sm r2 / r1 m1U12 r2 / s /s M 1 2 2 (r1 c1r2 / s) xê m1 z pU12 r2 2 1s r1 c1r2 / s xê2 ; sê c1r2 r12 xê2 r1 0 c1r2 xê 2 2 M êã r1 r1 xê r1 0 Mê ; 1 2 2 2 2 2 c x M 1 1 ê êä r1 r1 xê 21c1 r1 r1 xê 2M ê (1 asê ) 2M ê r1 0 M ; a r1 /(c1r2 ) s sê s sê 2asê sê s sê s m1 z pU12 r1 0 m1 z pU12 Механическая и электромеханическая характеристики АД Линеаризация механической характеристики АД 2 M ê (1 asê ) sê 1 M M 2 M ê (1 asê ) 2 M ê ; lim s 0 2 2 s s s s s s s sê r 0 a 0 ê ê 1 ê 2asê s sê m1 z pU12 (1 asê ) m1 z pU12 2 M ê (1 asê ) 2M ê M M ( s ) s s s s s 2 s sê 1c1 (r1 sê c1r2 ) sê r 0; a 0 1c1 r2 1 M ( s ) Mí î ì s sí î ì Пуск АД Mï m1 z pU12 r2 2 1 r1 c1r2 xê2 sí î ì / sê sê / sí î ì Mï sê2 kï Mí î ì 1/ sê sê sí î ì Коэффициенты активного и индуктивного сопротивлений стержня обмотки ротора r2 () r2ï kr () r2ë x2 () x2 ï k x () x2 ë r2 () r2 1 kr () 1 x2 () x2 1 k x () 1 sh 2 sin 2 k ( ) r ñh 2 cos 2 h / hï ð 1; 1 k () 3 sh 2 sin 2 x 2 ñh 2 cos 2 z p m1U12 r2 kr ( ) (1 ) M ï ks M n 2 r c r k ( ) (1 ) 1 1 2 r 1 2 x c x k ( ) (1 ) x 1 1 2 z p m1U12 r2 kr ( ) r c r k ( )2 1 1 2 r 1 2 x c x k ( ) 1 1 2 x Характеристики АД с учётом и без учёта эффекта вытеснения Зависимость основного потока и взаимной индуктивности АД от тока намагничивания k ln(k b) ac k (1 a ) b k exp ab 1 a (k b 1)(k b 1) ln ln k b 1 a ln k Асинхронный двигатель при несимметричном питании U2 U12 U12 U12 1 CM M M M CM s s s s 2s s ê 2as s ê 2s ê ê 2 as ê ê s s s sê 2s s sê 2 s ê ê M M M CM [U12 s U12 (2 s )] CM U12 [k2 (1 ) k2 (1 )] k U1 / U1 1 1 1 2 2 sin ; k U1 / U1 1 2 2 sin ; U 2 / U1 2 2 M 1 2 2( sin ) sin ; Mï ê 2 1 2 Механические характеристики при несимметричном питании Способы управления двухфазным АД Характеристики ДАД при амплитудном управлении 2( ) 1 2 ; 2 1 2 Характеристики ДАД при фазовом управлении sin ; sin Механические характеристики ДАД при амплитуднофазовом управлении Уравнения динамической модели АД в синхронной системе координат ( 1; i1 ) d 1 u i r j11 1 1 1 3 3 d dt m z | ψ i | z ( i i ); m m J p 1 1 p 1x 1 y 1 y 1x c d 2 2 dt 2 0 i r j 2 2 2 2 dt d 1 y d 1x d 1 u1 i1r1 j11 u1x i1x r1 11 y ; u1 y i1 y r1 11x dt dt dt 1 L1i1 Lm i2 ; 2 L2 i2 Lm i1 2 k2 1 1 k i L ; i ψ i k 1 1 1 m 2 1 1 2 k1k2 k1k2 Lm di1 1 2T2 T2 dψ1 1 ψ1 i1 j ψ1 j2 T2 i1 ; T2 L2 / r2 ; T2 T2 L2 / r2 dt T2 Lm L1 L1 dt k1 Lm / L1 , k2 Lm / L2 , 1 k1k2 di1x 1 T T d 1x 1 1x i1x 2 2 1 y 2T2 i1 y 2 dt T2 Lm L1 L1 dt di1 y 1 T T d 1 y 1 1 y i1 y 2 2 1x 2T2 i1x 2 dt T2 Lm L1 L1 dt Структурная схема динамической модели АД в синхронной системе координат ( 1; i1 ) Уравнения динамической модели АД в синхронной системе координат ( 1 ; 2 ) d 1 j11 r i u 1 1 1 dt i1 (1 k2 2 ) /(L1 ); i2 ( 2 k11 ) /(L2 ) d 2 0 i r j2 2 2 2 dt d 3 kk 3 kk m z p 1 2 ( 2 1 ) z p 1 2 ( 2 x 1 y 2 y 1x ); m mc J dt 2 Lm 2 Lm d 1 1 dt T u1T1 k2 2 1 j1T11 1 d 2 1 k j T 2 2 2 2 1 1 dt T2 d 1x 1 dt T u1xT1 k2 2 x 1x 1T11 y 1 d 1 y 1 k T 1 1 1x 1y 2 2y dt T1 d 2x 1 dt T k11x 2 x 2T2 2 y 2 d 2 y 1 k T 2 2 2x 2y 1 1y dt T2 Структурная схема динамической модели АД в синхронной системе координат ( 1; 2 ) Структурная схема АД при условии 1 const hU Структурная схема АД с линеаризованной МХ 2M ê 2M ê T2 1í î ì sê Динамика ДАД при фазовом управлении d Tì sin ñ dt (t ) sin c 2 ( c 2 c1 )et / Tì sin const; c var (t ) sin 2 c (sin 1 sin 2 )et / Tì sin var; c const Динамика ДАД при амплитудном управлении d 1 2 Tì ñ dt 2 (t ) 2 (, c 2 ) ( c 2 c1 )e t( ) / Tì const; c var (t ) 2 ( 2 , c ) [1 (1 , c ) 2 ( 2 , c )]e t( 2 ) / Tì var; c const АД при питании от источника тока Z ab r2 jxm jx2 j1 Lm r2 js1 L2 s ; r2 r2 js1 L2 j xm x2 s zab xm 1 s1 L2 / r2 1 s1 L2 / r2 2 2 xm ab U ab I1 zab I1 xm ab ; s I m U ab / xm I1 ab I1 L2 / L2 I1k 2 Зависимость токов АД от скольжения I1 ( s ) I10 I2 U ab r2 / s 2 x22 I1 zab s r2 1 s1 L2 / r2 2 I1 1 s1 L2 / r2 2 1 s1 L2 / r2 s1 Lm r2 1 s1 L2 / r2 2 2 s I1k2 Векторная диаграмма АД при токовом управлении Уравнение механической характеристики m1 m m m z p Lm i2 i1 1 z p Lm i2 (im i2 ) 1 z p Lm i2 im 1 z p Lm I 2max I m max sin 2 2 2 2 m 1 z p Lm I m max I 2max cos 2 m1 z p Lm I m I 2à 2 U ab s zab s U ab I2 I 2à I1 ; I m I1 zab / xm 2 2 r2 / s jx2 r 1 s L / r r 1 s L / r m 2 1 2 2 2 1 2 m1 L2m 2 r m ; Mê zp I1 ; sê 2 sê s 2 L2 x2 s sê 2M ê 2 Механические характеристики АД при токовом управлении M êU U1í2 î ì sêU sí î ì 1í î ì L2m L2 x2 M êI 2 2 2 3 1; 3 20; 1,3 4,5 2 2 M êI sêI Mí î ì r2 x2 I1í î ì Lm 1í î ì Lê r1 xê Динамическая модель АД при токовом управлении 3 Lm 3 Lm m zp 2 i1 z p 2 xi1 y 2 yi1x 2 L2 2 L2 d2 1 i1Lm 2 j2T2 2 dt T2 d2x 1 dt T i1x Lm 2 x 2T2 2 y 2 d2 y 1 i L T 1y m 2y 2 2 2x dt T2 Структурная схема АД при токовом управлении hI 2M ê 2M ê T2 1í î ì sê hI M T êI 2 1 20 hU M êU T2 Структурная схема АД с линеаризованной МХ